1. Introduction
Linear programming problems (LPPs) are a significant type of optimization problems. These LPPs are used to solve various real-world problems such as production planning, hospital management, transportation problems, diet planning, profit maximization, resource management, etc. Linear fractional programming problems (LFPPs) are LPPs where the objective function is a ratio between two linear functions. Such LFPPs are widely used in economic and commercial models to maximize profit and minimize cost, simultaneously. In the literature, out of several ways to deal with LFPPs, some methods are analytical while some are numerical.
In a significant development, Charnes and Cooper [
1] solved LFPPs by using an analytical variable transformation method that reduced the problem into LPPs with some added constraints. Tantawy [
2] considered an iterative method to find an optimal solution by sequentially moving from an initial interior point to another feasible solution until the optimal solution is reached. Meanwhile, Chadha and Chadha [
3] proved some results regarding the dual of an LFPP and expressed the dual to be an LPP, which was further solved to get a solution to the initial problem. Later, Rizk-Allah et al. [
4] provided a new algorithm for linear and nonlinear fractional programming problems, viz., chaotic crow search algorithm. In addition to these, there are various methods based on the simplex approach to find solutions of LFPPs. Sharma and Bansal [
5] used the branch-and-bound process along with the simplex technique to solve LFPPs. Next, Pandey and Punnen [
6] generalized and extended existing simplex algorithms.
LFPPs can be used to frame many real-world problems, but in most cases, the data provided to the decision-maker are not clearly defined and precise. Generally, there is some form of uncertainty associated with the data. These uncertainties can be overcome by incorporating the fuzzy sense introduced by Zadeh [
7] in the parameters, constraints or variables. Nowadays, fuzzy linear fractional programming problems (FLFPPs) are used instead of LFPPs to cater to real-world scenarios. Over time, a number of different techniques have been explored by researchers to solve FLFPPs. Hladík [
8] and Borza et al. [
9] studied generalized LFPPs with interval uncertainties. Later, Pandian and Jayalakshmi [
10] solved LFPPs by a denominator restriction method, which further extended to a decomposition restriction method that solved the FLFPP by converting the problem into three crisp-level LFPPs. Further, Das and Mandal [
11] as well as Das et al. [
12] converted FLFPPs into crisp multiobjective LFPPs, which were then solved to obtain a solution. In one of their studies, Sharma et al. [
13] considered multiobjective fractional programming problems for fixed aspiration levels using symmetric fuzzy parameters. Dutta et al. [
14,
15] worked on the sensitivity of FLFPPs and also investigated the impact of tolerance on both LFPPs and FLFPPs. Recently, Borza and Rambely [
16] solved the FLFPPs with crisp variables and coefficients as TFNs by using a combination of the max-min method and an
-cut-based approach.
Veeramani and Sumathi [
17] suggested a method that converted the problem into a multiobjective LFPP and then solved it using the fuzzy programming approach. However, Mehra et al. [
18] proposed the novel concept of
-acceptable optimal solution of an FLFPP having fuzzy coefficients. Further, Das et al. [
19] proposed a new ordering for TFNs and used this to reduce an FLFPP into a triobjective problem. Meanwhile, Chinnadurai and Muthukumar [
20] considered an FLFPP with all parameters and variables as triangular fuzzy numbers (TFNs) and proposed an
-cut-based numerical approach to solve the problem by converting it into an equivalent biobjective model. They erroneously claimed to propose a method for any general FLFPP. Subsequently, Ebrahimnejad et al. [
21] worked on a similar numerical approach with non-negative trapezoidal fuzzy numbers. In the present study, a counterexample is cited, which shows that the approach in [
20] can be used only when all the parameters are non-negative TFNs. Further, we have established the conditions for the proposed
-cut-based method to solve the above-mentioned FLFPPs having unrestricted parameters, which overcomes the shortcoming in [
20].
The rest of the paper is structured as follows:
Section 2 is dedicated to notations, definitions and arithmetic operations, used throughout this paper.
Section 3 describes the formulation of a standard FLFPP having asymmetric TFNs. In
Section 4, the approach in [
20] is presented along with a counterexample to highlight its shortcoming. The motivation for the new approach and the limitations of existing approaches are indicated in
Section 5. Next,
Section 6 explains the proposed approach. Later, a numerical illustration and a real-world application are worked out using the proposed method in
Section 7. The results are discussed in
Section 8. Finally, conclusions and future scope are addressed in
Section 9.
2. Notations and Definitions
Some preliminary notations and definitions used in the article are presented in this section.
Definition 1 ([
20]).
If X is a collection of objects denoted generically by x, then a fuzzy set in X is a set of ordered pairs: is called the membership function of which maps X to , and is called the membership degree of x in . Definition 2 ([
20]).
The (crisp) set of elements that belong to the fuzzy set at least to the degree is called the α-cut of and is defined as: Definition 3 ([
22]).
A fuzzy set in is said to be a fuzzy number if- (i)
such that
- (ii)
, is a closed interval in , i.e., ;
- (iii)
the set is a finite subset of
Arithmetic operations on closed intervals of
Let and be two closed intervals of ; we define:
- (i)
- (ii)
- (iii)
- (iv)
where and
- (v)
where and
, provided .
Remark 1. In particular, for ; , - (vi)
iff and
Ordering of fuzzy numbers: [
20]. The ordering of fuzzy numbers is defined as follows:
- (i)
iff , i.e., and
- (ii)
iff
Definition 4 ([
21]).
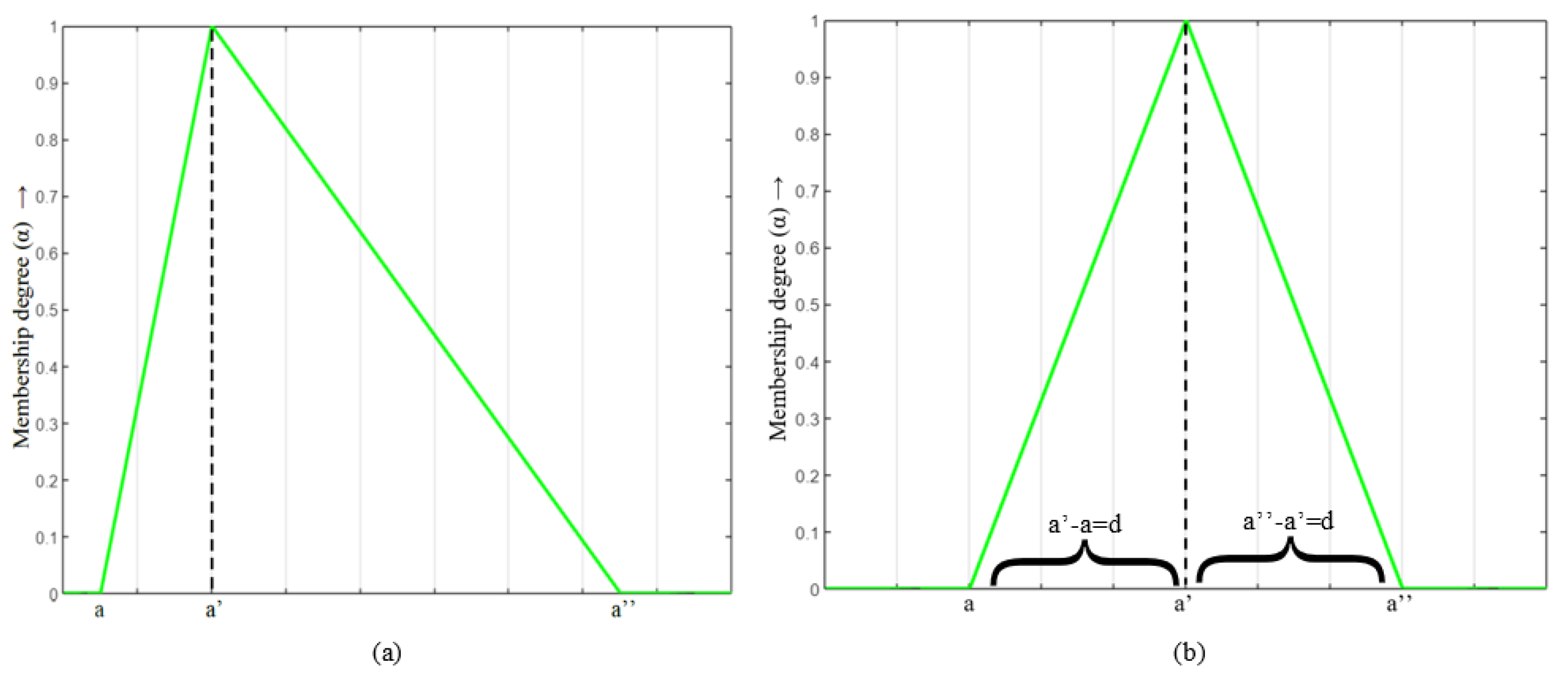
A triangular fuzzy number (TFN) where is a fuzzy set in if its membership function is given byFor a TFN :
- (i)
- (ii)
is a non-negative TFN iff , i.e., .
- (iii)
is a positive TFN iff .
Clearly
- (iv)
When , it is said to be symmetric else asymmetric TFN
Definition 5. A fuzzy number is said to be a negative TFN if is not a non-negative TFN.
Let us denote the set of all TFNs in as . Further, let and be the collection of all non-negative and all positive TFNs, respectively, in . It follows that Definition 6 ([
22]).
Let be a fuzzy set defined on the universal set X. Then, for some is a fuzzy set defined on X as , where Theorem 1 (First Decomposition Theorem [
22]).
The first decomposition theorem states that any fuzzy set can be represented using its α-cut alone. Hence, to define arithmetic operations on TFNs, only the α-cut of the resulting fuzzy number is sufficient. Arithmetic operations on α-cut of fuzzy numbers [20]: Let and with α-cut and , respectively. Then, the fuzzy arithmetic operations between and using the α-cut are defined as follows:
- (i)
- (ii)
- (iii)
Scalar multiplication:
For any
- (iv)
and
Remark 2. Let , i.e., then
and
- (v)
and
, provided
Remark 3. Let , then 6. Proposed -Cut-Based Method
To solve (M1), we use α as the satisfaction level on the objective function but for each constraint, different levels of satisfaction can be applied. For simplicity’s sake, the same satisfaction level r is used for all the constraints, throughout this paper.
For some fixed
α and
, after applying
α-cut on the objective function and
r-cut on all the constraints, we get the resulting model as:
Since if an optimal solution exists, then by Proposition 2, . Hence, we need to solve the model for solutions in the set only. Therefore, to solve the model, we use the conditions of , given by and . This further implies that and . Using arithmetic operations for closed intervals, we obtain the following model:
where
The above problem is then split into two separate problems, viz.,
subject to all the constraints of (FLFPP).
subject to all the constraints of (FLFPP).
The variables are considered to be non-negative TFNs, while there are no restrictions on the parameters Therefore, after using Remark 2, both the bounds and the constraints are further reduced as follows:
Lower-bound objective: where
subject to
Upper-bound objective: where
subject to all the constraints of the (LB).
Remark 4. The membership function of the given objective function for some fixed value of is obtained by plotting a graph between the intervals corresponding to . The proposed method works for any FLFPP irrespective of the nature of the parameters.
7. Illustrative Examples
In this section, an example from the literature and a real-world application in the transportation sector, having unrestricted parameters, are worked out to illustrate the proposed method.
Example 1 ([
20]).
Consider the following FLFPP: subject to For some fixed values of
, using the algorithm in
Section 6, the lower-bound and upper-bound objectives of the problem are as follows:
Lower-bound objective:
subject to
Substituting values of all -cut, the bounds are rewritten as:
Lower-bound objective: subject to
Upper-bound objective:
subject to all the constraints of (LB1-1).
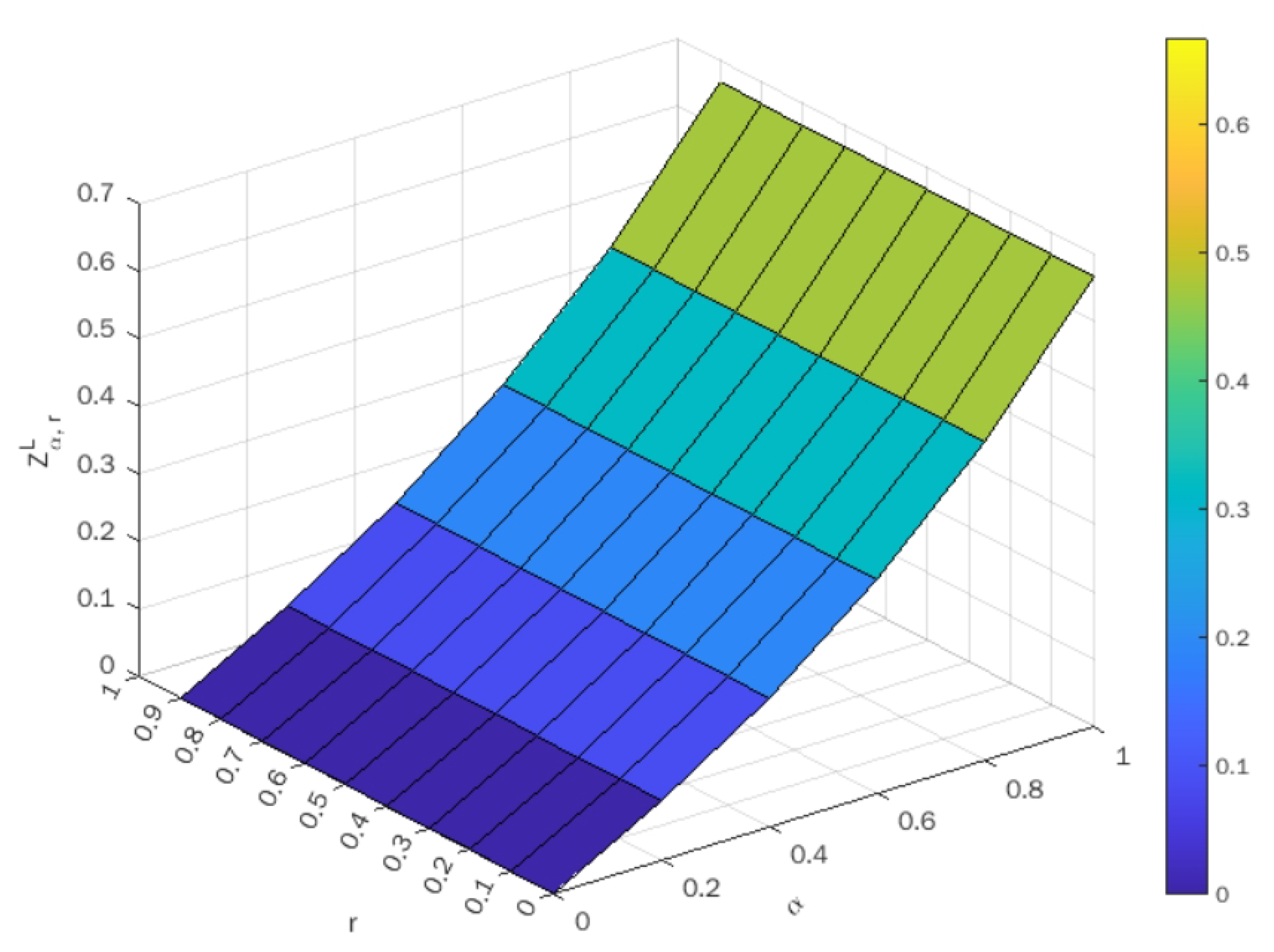
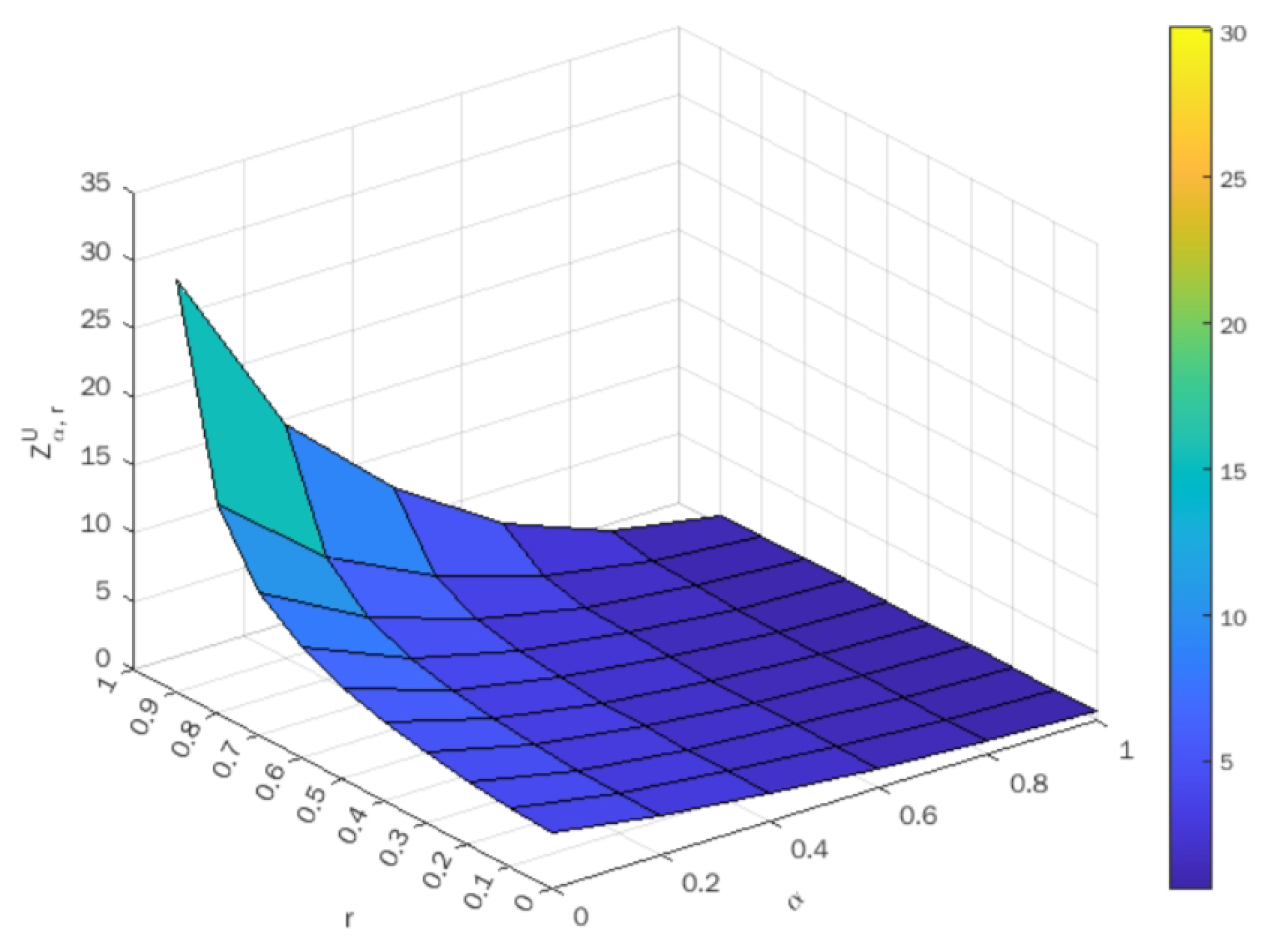
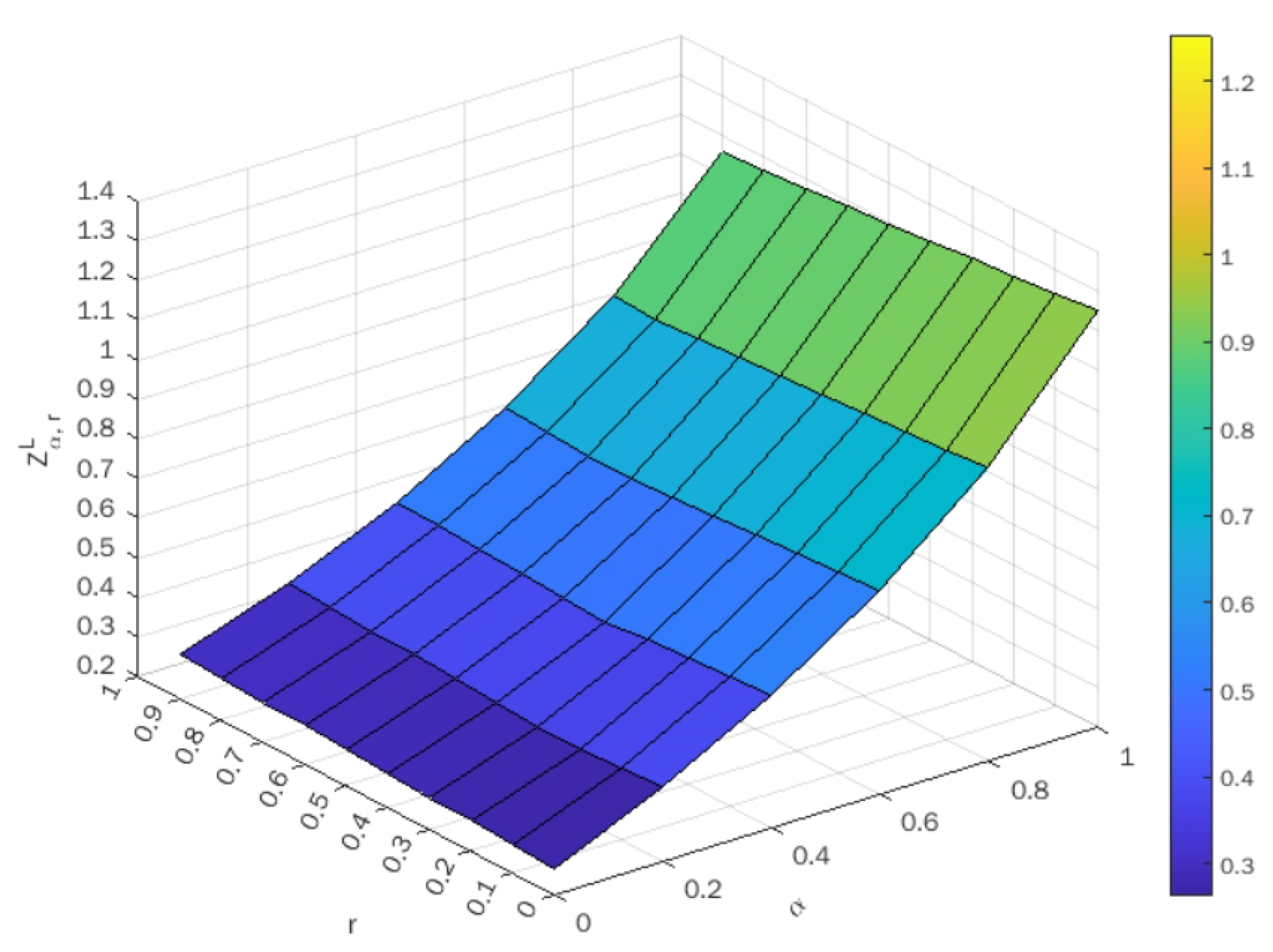
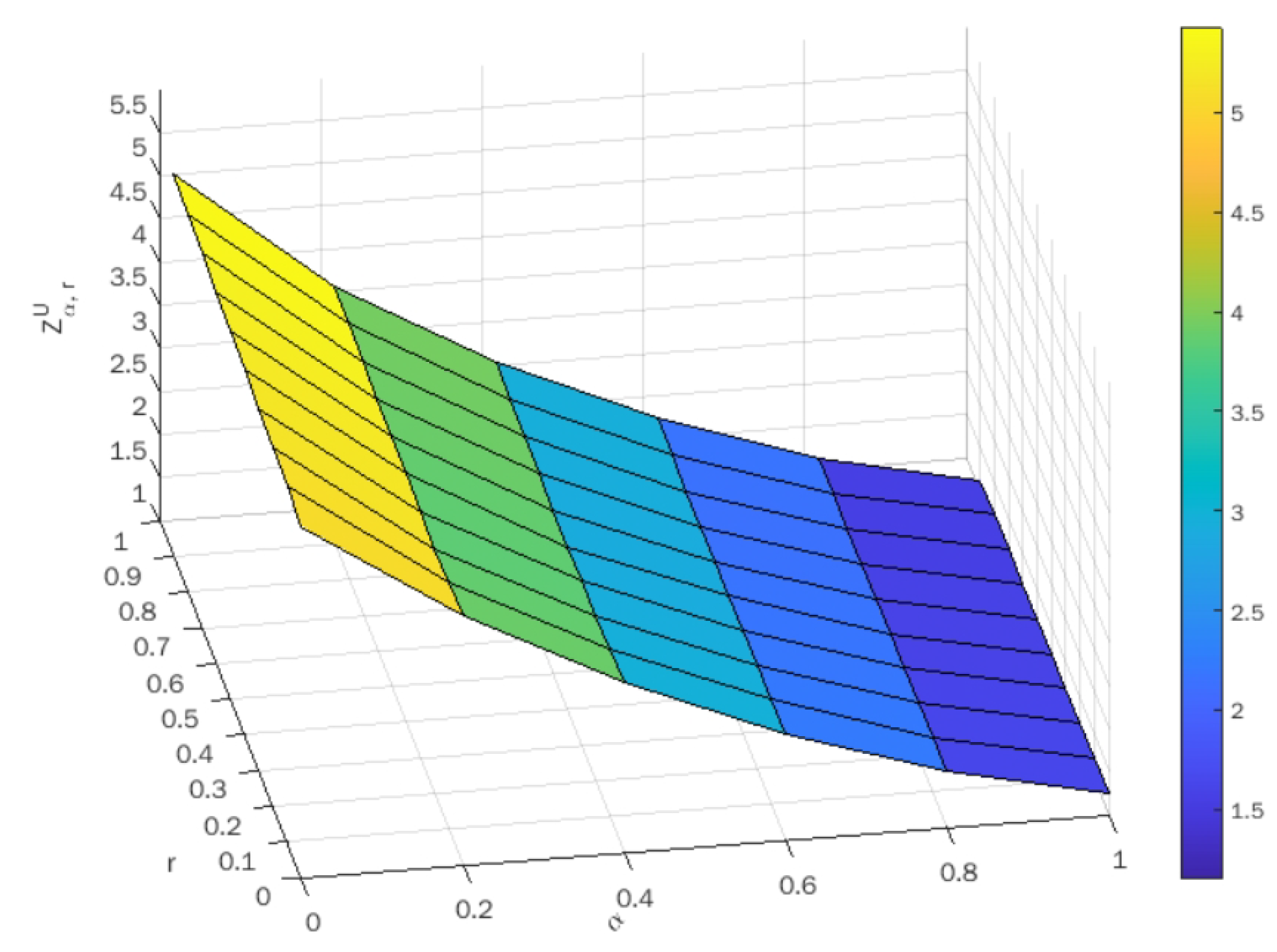
Upon taking different values of
, the optimal value of both the lower-bound and upper-bound objectives are indicated in
Table 3 and
Table 4, respectively. Using these tables, the surface plots of objective values against
are shown in
Figure 3 and
Figure 4 for the lower-bound and upper-bound objectives, respectively.
Figure 5 represents the membership function of objective function
when particular values are considered for
and
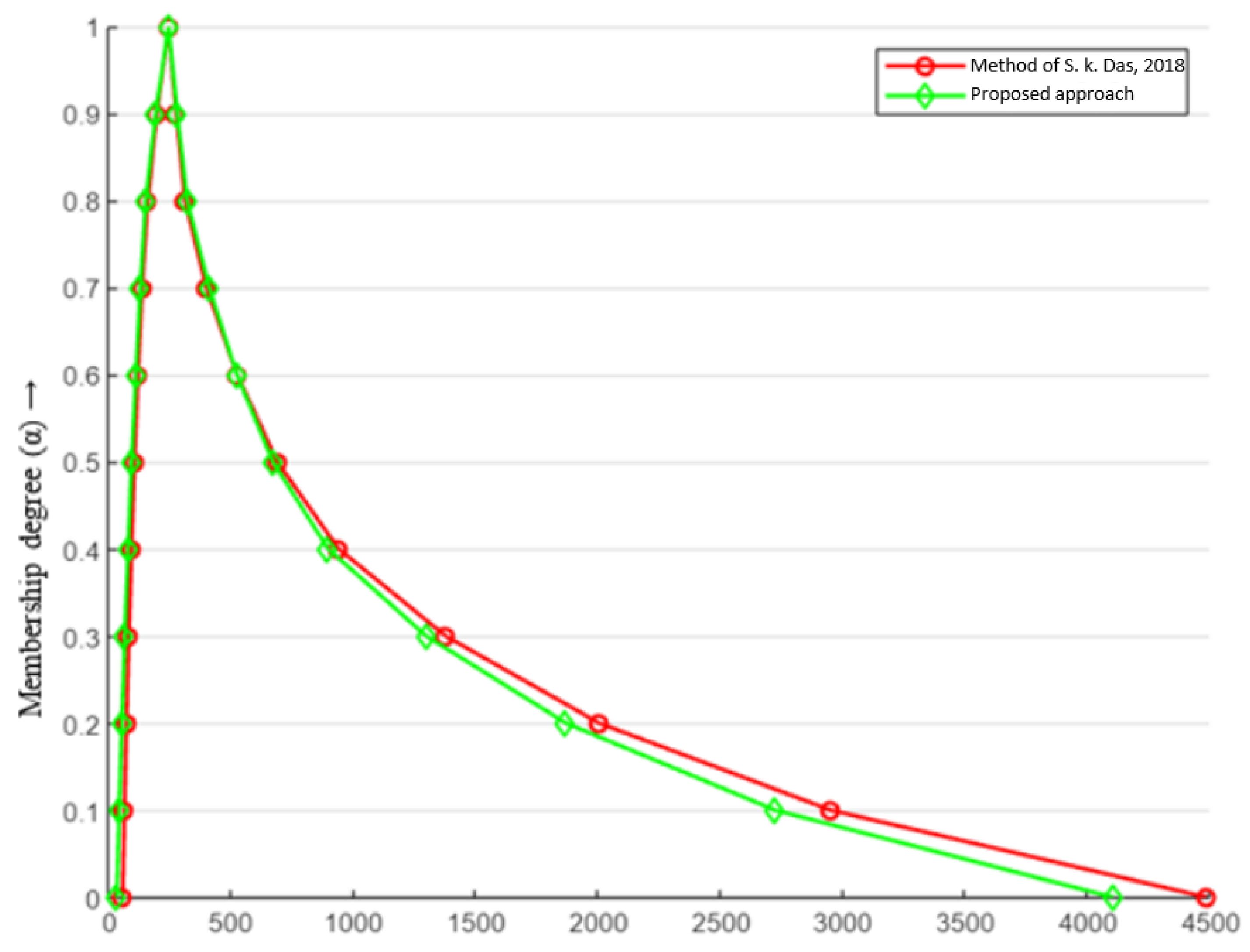
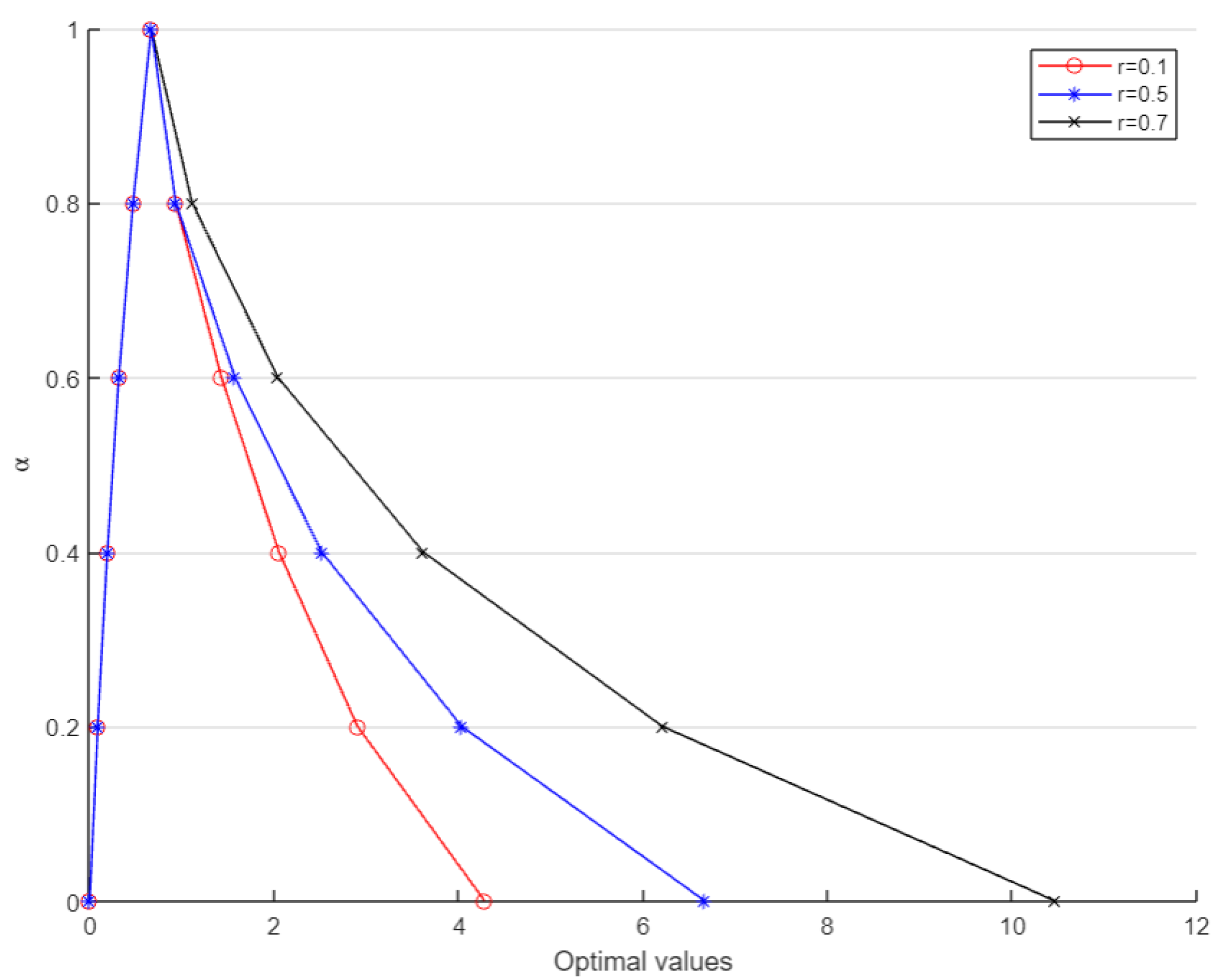
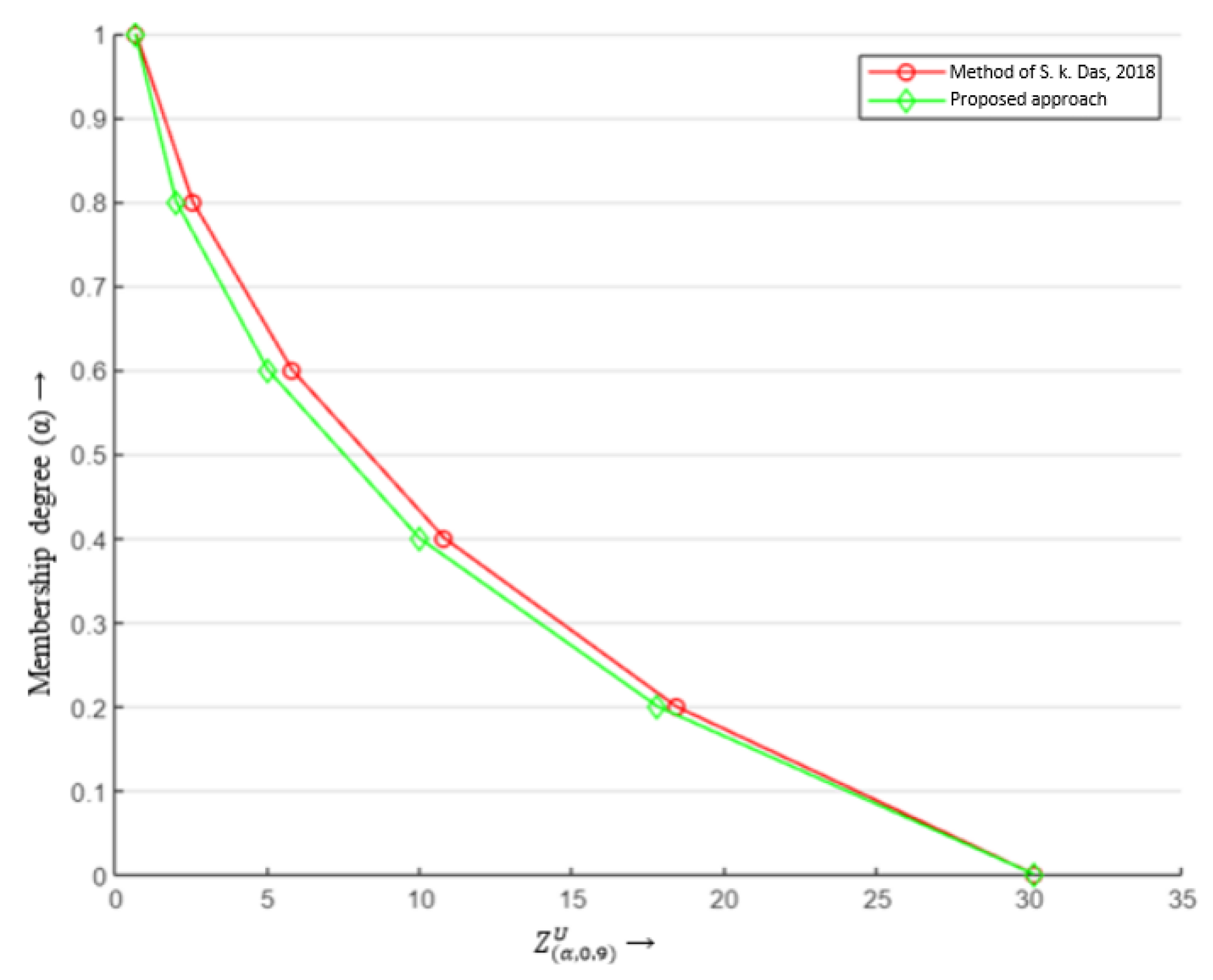
Observation 2: In
Table 5, the optimal values of the lower- and upper-bound objectives are compared using
and different values of
, using the approach in [
20] and the proposed approach. The lower-bound objective values are identical for all
but the upper-bound objective values exhibit the fallacy in Chinnadurai and Muthukumar’s [
20] approach. This shows that the optimal values obtained using the method in [
20] are misleading and different from the actual ones.
Figure 6 shows the contrast between the optimal values for the upper-bound objective evaluated using both approaches.
Example 2. Application in transportation sector.
A leading textile company has a well-established network of stores and factory outlets. Due to industrialisation and urbanisation, the demand for their goods at three factory outlets
is expected to increase. As the future requirement is imprecise and uncertain, TFNs are used to represent the foreseen requirements at these outlets as given in
Table 6. To meet these requirements, the company decides to establish two new storages
. The storage capacities are estimated and are indicated in
Table 7.
Table 8 and
Table 9 give the presumed profit and cost of transport per unit of product from the
ith store to the
jth outlet.
The company aims to obtain the maximum value of expected profit–cost ratio (PCR) for transporting their goods between these selected storage facilities and the outlets with a view to seek future prospects.
Let
be the units of products transported between the
ith store and the
jth outlet. The proposed technique is applied to forecast the maximum PCR value. The fuzzy linear fractional programming model framed using
Table 6,
Table 7,
Table 8 and
Table 9 is as follows:
subject to
where
The decision-maker can fix the satisfaction levels
, for the objective function and constraints, respectively. Using the algorithm in
Section 6, the lower and upper bounds of the problem are obtained as follows:
Lower-bound objective: subject to
(As and are negative for some values of .)
Upper-bound objective:
subject to all the constraints of (LB2).
Substituting all -cut values, we get the bounds as:
Lower-bound objective:
subject to
Upper-bound objective:
subject to all the constraints of (LB2-1).
The optimal value of lower-bound and upper-bound objectives corresponding to various values of
are indicated in
Table 10 and
Table 11, respectively. The surface plots of objective values against
are shown in
Figure 7 and
Figure 8 for lower-bound and upper-bound objectives, respectively.
The choice of satisfaction level where corresponds to the crisp case and the maximum PCR is predicted to be 1.149. In realistic scenarios, such crisp values lack much significance as uncertainty is involved. Thus, for some fixed satisfaction levels of the objective and constraints, respectively, a range of PCR values are evaluated and examined. For example, if the decision-maker selects as the satisfaction level of constraints and for the objective function, then the anticipated PCR range is . This gives a better picture to the company for looking into future prospects.
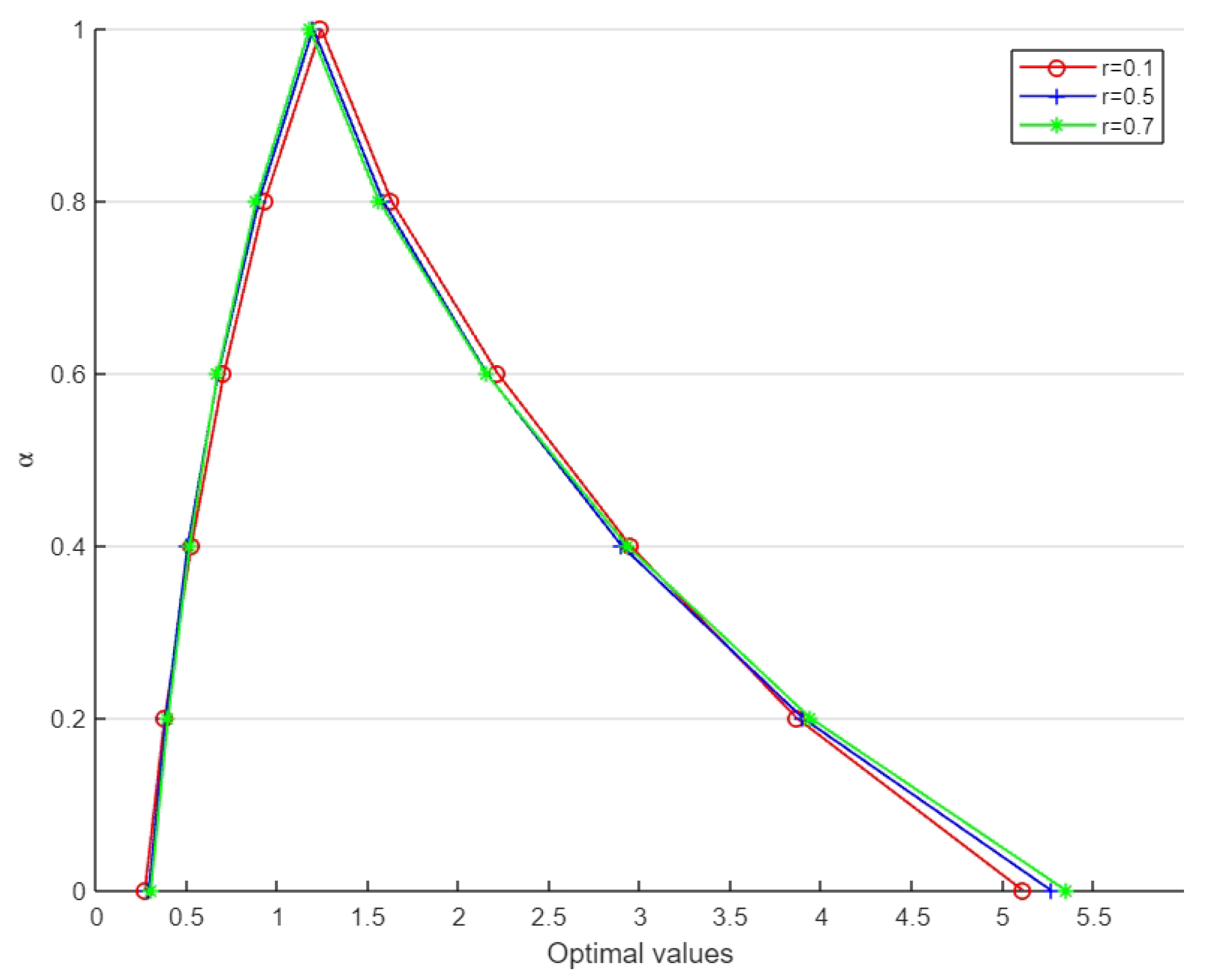
Moreover, for a fixed satisfaction level of the constraints, the membership function of foreseen PCR can be obtained using different
values. For some given values of
r, i.e.,
and
, the corresponding membership function is shown in
Figure 9.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}