
Design of Gas Turbine Cooling System Based on Improved Jumping Spider Optimization Algorithm
1
School of Automation, Shenyang Aerospace University, Shenyang 110136, China
2
Liaoning Electric Power Transmission & Transformation Engineering Co., Ltd., Shenyang 110179, China
*
Author to whom correspondence should be addressed.
Machines 2022, 10(10), 909; https://0-doi-org.brum.beds.ac.uk/10.3390/machines10100909
Submission received: 27 August 2022
/
Revised: 29 September 2022
/
Accepted: 6 October 2022
/
Published: 8 October 2022
(This article belongs to the Special Issue Diagnostics and Optimization of Gas Turbine)
Abstract
:The gas turbine cooling system is a complex MIMO system with a strong coupling, nonlinear, time-varying and large disturbance amplitude. In order to automatically control the target flow, target temperature and pipeline pressure, in this paper, the decoupler and regulator of a gas turbine cooling system are designed. Firstly, the working principle of a gas turbine cooling system and the coupling between the controlled variables of the system are analyzed. The decoupler of the system is designed by using the diagonal matrix decoupling method. The transfer function models of the coupling system are built through system identification, and the decoupling matrix of the system is calculated according to the diagonal matrix decoupling method and transfer function models. Then, the engine cooling control system simulation model is constructed and an improved jumping spider optimization algorithm is proposed. The parameters of the controller are optimized by the improved jumping spider optimization algorithm. Finally, the control system simulation is done and compared with the jumping spider optimization algorithm and the particle swarm optimization algorithm. The simulation results show that the improved jumping spider optimization algorithm is more suitable for the multivariable strong coupling nonlinear engine cooling system. For the flow and pressure control, the transient time and overshoot are reduced, and the steady-state error is less than 1%. For the temperature control, the result of the improved jumping spider optimization algorithm is more smooth, without overshoot, and almost does not exceed the set inlet water temperature. The overshoot, steady-state errors and transient time of the system have been improved, which proves the feasibility and significance of the improved jumping spider optimization algorithm by comparing the control performance and optimization time.
1. Introduction
The gas turbine cooling system is an important industrial process control problem which is widely studied by scholars [1,2]. Most gas turbine cooling system in steamships rely on secondary water circulation and a heat exchanger. The control accuracy of the gas turbine cooling system studied in this paper mostly depends on the on-site staff who adjust the opening of valves and rotation speed of the motor according to experience. There are problems such as a low working efficiency, low control accuracy, long adjustment time, unstable output variables, etc. The system has certain shortcomings in rapidity, accuracy and safety. In order to solve these problems caused by the manual operation of the gas turbine cooling system, it is necessary to adopt the automatic control system to realize the accuracy control of the load inlet flow, load inlet temperature and main pipe pressure. The gas turbine cooling system is an MIMO complex system. Due to the large number of controlled variables in an MIMO system, it is necessary to add multiple control loops to control it, which leads to a certain coupling phenomenon among variables [3,4] which will reduce the performance of the system, making the gas turbine cooling system complex and even difficult to control. Variables have nonlinear strong coupling characteristics, and need to be decoupled. Traditional decoupling methods are mainly divided into static decoupling and dynamic decoupling. The design of the static decoupler requires some harsh conditions, such as ensuring the system is closed-loop stable, the closed-loop transfer function matrix is nonsingular and the diagonal constant matrix is in a steady state. Once the complex industrial system has a strong nonlinearity or the model has a relatively large error, it is often difficult to obtain a good control performance [5,6]. A dynamic decoupler provides model information to the decoupling process and the decoupling compensator acts directly on the controlled object, which can obtain a better control performance and meet the design requirements of a nonlinear MIMO system controller [7,8]. The controllers of the gas turbine cooling system are proportional–integral–derivative (PID) controllers. Since there are three controlled variables of the gas turbine cooling system and three corresponding PID controllers, it is a challenge for the parameters setting of the PID controllers. It is a good method to introduce the optimization algorithm to optimize the parameters of the PID controller. Optimization algorithms have developed rapidly. The common optimization algorithms have particle swarm optimization (PSO) [9], genetic algorithm (GA) [10], simulated annealing (SA) [11], etc. Reference [12] pointed out that when solving complex problems, particle swarm optimization shows a poor local search ability and a slow convergence speed. Reference [13] pointed out that when the controller needs to set a large number of parameters (five), the complexity of the genetic algorithm is too high and the performance is relatively ill-behaved. References [14,15,16] improved the particle swarm optimization algorithm to speed up the convergence speed of the algorithm and improve the accuracy of the convergence results. Reference [17] proposed an improved genetic algorithm PID control aiming at the problem that PID tuning methods cannot deal with the complex process of non-linearity, time-varying, coupling and the uncertainty of the parameters and structure in time. Reference [18] improved the passive web optimization, which is more applied to the PID controller parameters setting for a DC motor. The physics based multi-verse optimizer (MVO) has emerged in recent years [19]. Black hole, white hole, wormhole exchange and expansion are similar to the cross operation of the genetic algorithm, and the best universe is obtained by updating. It was originally used to deal with the single objective and continuous optimization problems. Although the MVO has been improved, there are still some limitations for the gas turbine cooling system. The dingo optimization algorithm (DOA) [20] simulated four behaviors of African wild dog hunting: the siege, chase, scavenging and survival. When applied to the parameters optimization of the PID controller, it performs well in overshoot and transient time, but its performance in peak time is not as good as that of the artificial bee colony (ABC) [21].
The jumping spider optimization algorithm (JSOA) [22] is a new intelligent optimization algorithm which was proposed in 2021. It has the characteristics of fast convergence and a strong optimization ability. The objective function selected in the literature is the reference function, and it is proved that in the unimodal function, the jumping spider optimization algorithm performs better than other optimization algorithms such as the chaos game optimization (CGO) and Archimedes optimization algorithm (AOA). However, when applied to the gas turbine cooling system, the performance and overshoot of the jumping spider optimization algorithm are unacceptable. This is unfavorable to the stability and service life of the gas turbine cooling system, and is not applicable to the MIMO control system represented by the gas turbine cooling system. The genetic algorithm within the DTC shows a very good robustness in speed and torque by reducing torque ripples and suppressing overshoots [23]. Reference [24] proposed an optimized genetic algorithm to automatically tune the PI regulator in the model reference adaptive system based on several execution sequences. The results prove that this strategy can enhance speed and tracking performance while guaranteeing an excellent behavior of the overshoot and rejection time. The parallel mechanism potential of the genetic algorithm is not fully utilized, which is also a potential research direction. In Reference [25], the central chord architecture was considered, and the performance characteristics were obtained by using gray wolf optimization (GWO) and the flower pollination algorithm (FPA). Reference [26] proposed a new maximum power point tracking (MPPT) framework for photovoltaic (PV) systems, which was based on the remora optimization algorithm (ROA) under standard and partial shadow conditions. In view of the limitations of the application of the above optimization algorithm in the gas turbine cooling system, in this paper the pheromone model of the JSOA and jumping cycle strategy are improved. An intelligent PID controller based on the improved jumping spider optimization algorithm is proposed. The gas turbine cooling system is developed through the improved jumping spider optimization algorithm to solve the temperature, flow and pressure real-time control.
In the second section, the working principle of the gas turbine cooling system is introduced and the decoupling device is designed. In Section 2.2 and Section 2.3, the coupling relationship of the gas turbine cooling system is analyzed and the system mathematical model is obtained through system identification; the simulation block diagram of the three input and three output decoupling control system is established by the diagonal matrix decoupling method. In the third section, the principle of the JSOA and IJSOA are introduced. Section 3.2 improves the pheromone model of the JSOA to overcome the limitations of the JSOA in an MIMO system. Due to the complexity of the JSOA optimization strategy, a jumping out of the loop strategy is designed to speed up the algorithm running time. In the fourth section, PSO, the JSOA and IJSOA are applied to the controller parameter tuning of the gas turbine cooling system, respectively, and the simulation results are obtained.
2. Gas Turbine Cooling System
The gas turbine cooling system [27,28] is a multivariable, strongly coupled and nonlinear complex system. From the perspective of the safety of production, the gas turbine cooling automatic control system can avoid the injury of operators caused by manual control, improve the working environment and ensure a smooth production. From the perspective of economics, the automatic control system for gas turbine cooling can reduce the number and intensity of operators and improve the system efficiency.
2.1. System Structure
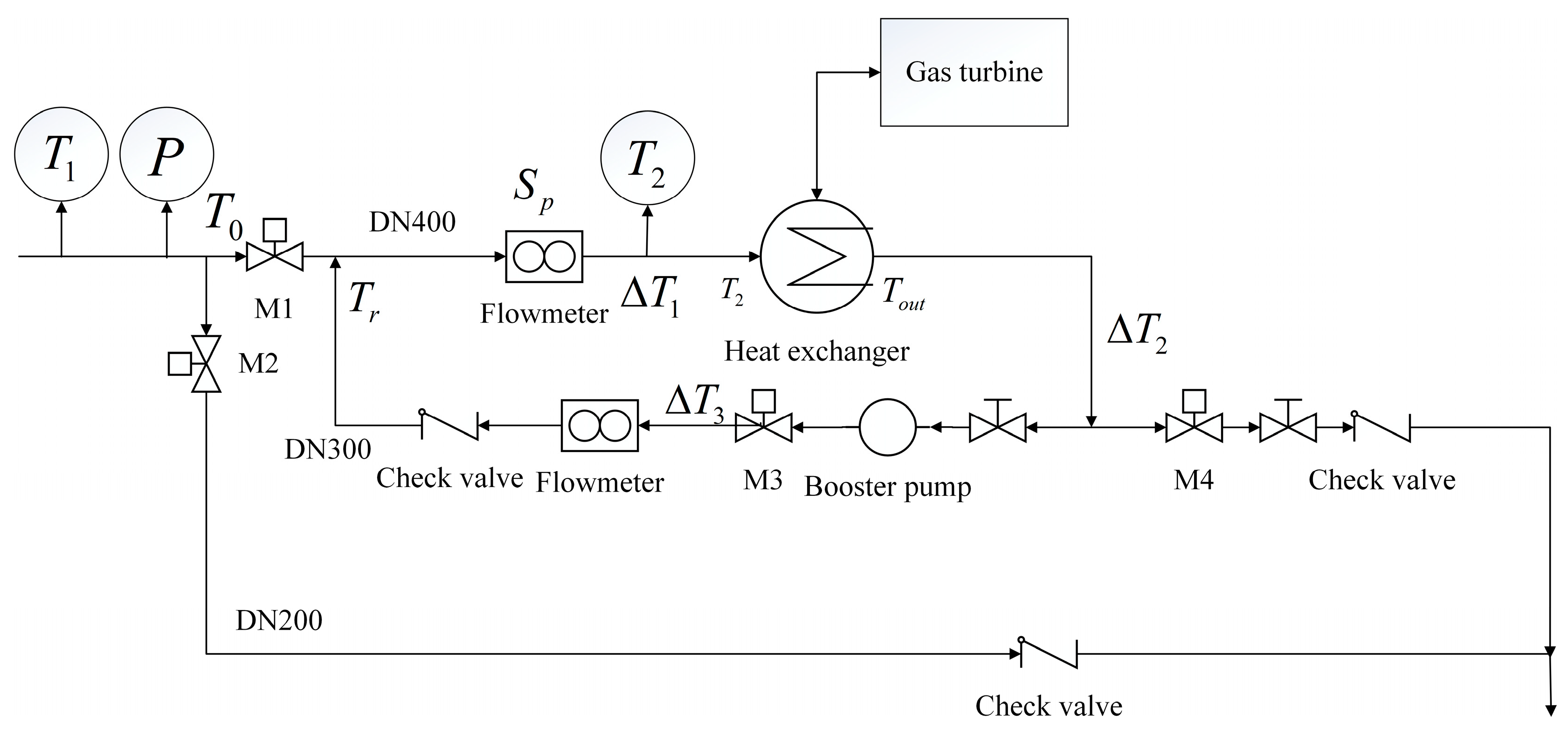
The gas turbine cooling system consists of a temperature sensor , flowmeter, pressure sensor , heat exchanger, solenoid valve , manual control valve, check valve, booster pump and other equipment, as shown in Figure 1.
Cold water flows into the DN400 pipe and passes through the temperature sensor and pressure sensor . When the pressure sensor detects that the pressure in the main pipe of the system is too high, in order to maintain the constant pressure in the main pipe, the opening of the solenoid valve increases, a part of the cold water is drained for pressure relief and the relief valve is connected with a one-way valve to prevent backflow. The other part of the cold water flows into the main pipeline through an electromagnetic valve , which is detected by the flow meter and temperature sensor , and then enters the heat exchanger. Heat and cold media are exchanged to cool down the gas turbine. As heat exchanges, a part of the hot water passes through the solenoid valve connecting the one-way valve to drain through the ditch, and the other part of the hot water is mixed with cold water through the solenoid valve . This cycle ensures that the cold water flowing into the heat exchanger has a constant temperature, which is conducive to the stability and safety of the system, increases the life of the heat exchanger, makes a small part of the secondary water heat be recycled after the heat exchange of the heat exchanger, and drains most of the heat away to complete the cooling of the burner. The secondary water circulation temperature control is implemented.
2.2. Coupling Relationship
There are three controlled target variables of the gas turbine cooling system, namely target water flow, target load inlet water temperature and target main pressure. The target main pressure is controlled by the valves and . The target water flow ( in Figure 1) is controlled by valves and . The control outputs of , and are , and respectively. The load inlet temperature ( in Figure 1) is mainly controlled by the inlet temperature , loop temperature and temperature loss effect. The coupling relationship of each variable is as follows:
The loop temperature is affected by the output temperature of the heat exchanger ( in Figure 1) and loop temperature loss (, in Figure 1):
The functions f, g and h of the constraint conditions are difficult to express accurately. , and are coupled to the input quantities , and and can be expressed as follows:
The system objective function is:
, and represent the target set value. According to the analysis of system coupling characteristics, the gas turbine cooling system can be regarded as a multi-coupling, nonlinear and time-varying complex MIMO system. Common control methods are difficult to achieve the ideal effect. Before designing the controller, the decoupler should be designed to weaken the correlation between the variables.
2.3. Decoupling for Gas Turbine Cooling System
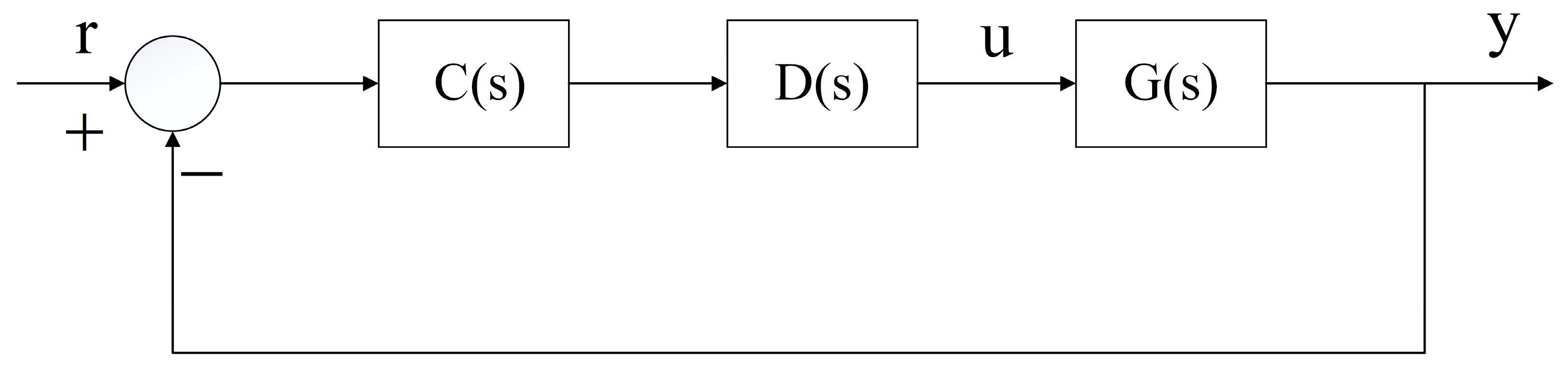
According to above control process of the gas turbine cooling system, mathematical modeling is performed in combination with the traditional MIMO system [4,6]. The general structure of the decoupling system is shown in Figure 2.
C(s) is the controller matrix, D(s) is the decoupling matrix and G(s) is the coupling system transfer function matrix. For an n-dimensional MIMO system, it is generally expressed as:
According to the different decoupling methods, the expressions of the designed decoupler matrix are also different. The method used in this paper is the diagonal matrix decoupling method. The product of the control object characteristic matrix and decoupling link matrix is equal to the diagonal matrix:
Therefore, the output and input variables of the controlled object should conform to the following matrix equation:
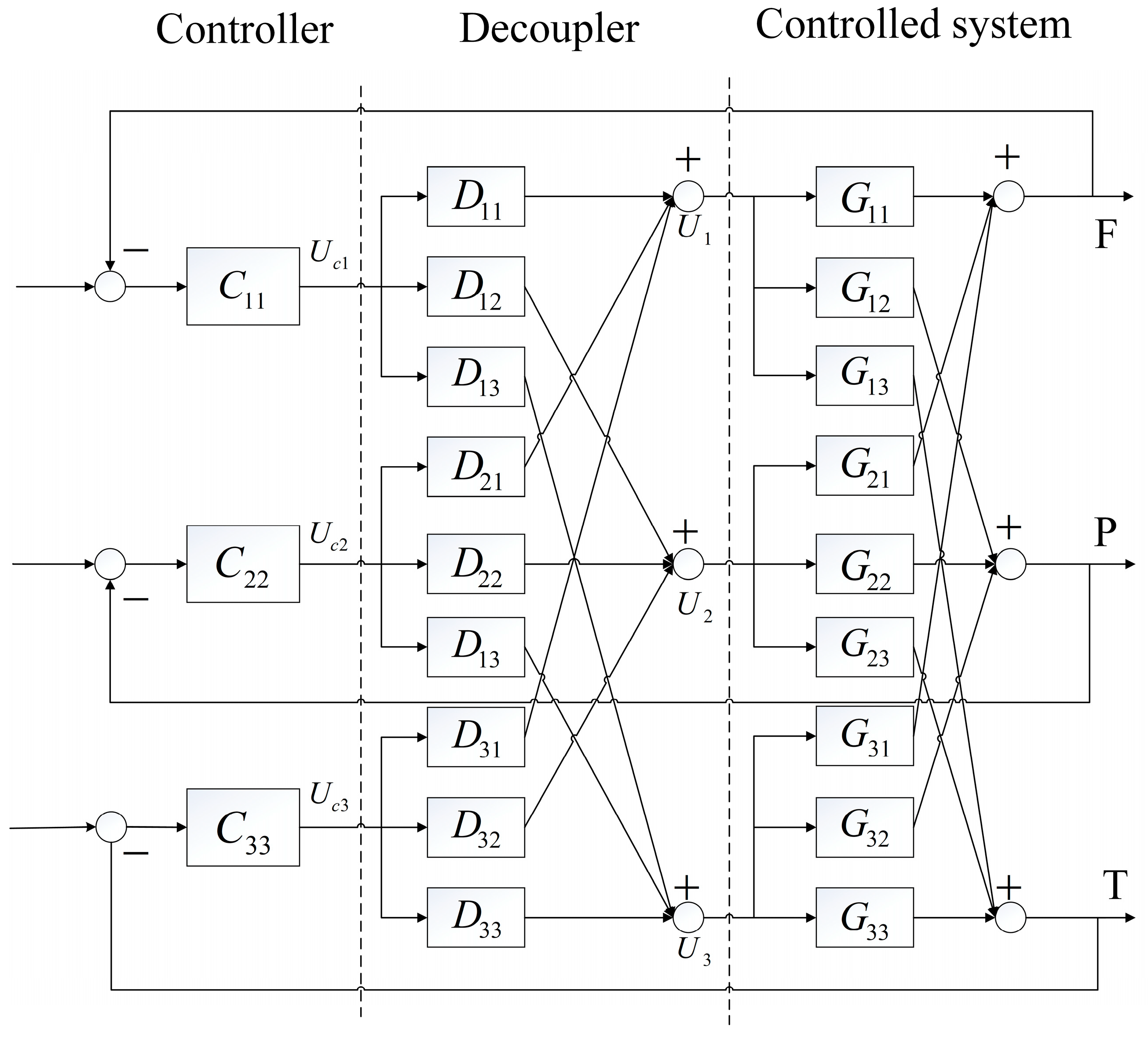
The inputs of the three input and three output model are inlet flow regulation, pressure regulation of relief valve and the return water flow regulation. The outputs are flow , inlet pressure and inlet temperature of the heat exchanger. The mathematical description of the input and output is as follows:
Each loop is independently controlled by the decoupling algorithm. The PID controller is selected as the controller. Due to the complexity of the actual gas turbine cooling system, the diagonal matrix decoupling method cannot achieve complete decoupling. There must be coupling when there are dependencies between modules. Absolute zero coupling of the industrial systems cannot be achieved. In addition, complete decoupling is very sensitive to the changes of system parameters. The inaccuracy of system parameters or some which drift in operation will destroy complete decoupling. The block diagram of the decoupling control system is shown in Figure 3.
3. Parameter Optimization of Controller
The model of the gas turbine cooling system control system has been built and the decoupling device has been designed according to diagonal matrix decoupling. In this section, the controller parameter is optimized through the optimization algorithm, so as to obtain a good control effect and be used for the gas turbine cooling control system.
3.1. Jumping Spider Optimization Algorithm
The jumping spider optimization algorithm is a new intelligent optimization algorithm which was proposed in 2021 [22]. The algorithm achieves the goal of optimization by simulating the hunting behavior of jumping spiders, including the persecution behavior, jumping behavior, searching prey and pheromone. For the benchmark function, the average value, the best value and the standard value of the JSOA perform well, which proves that the algorithm has certain advantages. Persecution means that when a jumping spider is not within the range of jumping to catch prey, it will approach it by doing some secret actions until it reaches the range of jumping to catch prey. The persecution strategy can be expressed by a uniformly accelerated rectilinear motion:
As the iteration progresses, Equation (13) can be expressed as:
where represents the new position of the individual after iteration, represents the current position of the individual and is the position of a randomly selected individual. The jumping behavior of jumping spiders can be expressed as the parabolic motion:
is the initial speed with 100 mm/seg. G is the gravitational acceleration with 9.80665 m/, is a random number between 0 and 1.
The jumping spider searches for its prey in two ways: local searches and global searches:
is the best individual found from the previous iteration, walk is a uniform random number between −2 and 2 and is a random number between 0 and 1. Equation (17) represents the local searches.
is the worst individual found from the previous iteration, is a Cauchy random number between 0 and 1. Equation (18) represents the global searches.
Pheromone is secreted by an individual to the outside of the body and it is detected by other individuals of the same species through the olfactory organ, so that the latter shows some behavior and has a communication function. The pheromone model of the jumping spider optimization algorithm is:
When the pheromone of an individual is less than or equal to 0.3, the following equation is used for updating:
and are two different individuals randomly selected, and . The pheromone concentration update of the jumping spider optimization algorithm is similar to the black widow optimization algorithm (BWOA) model [29]. In intelligent bionics, the pheromone mechanism is easy to cause the optimization result to fall into local optimization. When the JSOA is applied to the gas turbine cooling system, a relatively large overshoot occurs, which means that the obtained PID parameters are not ideal enough and are not suitable for the MIMO system represented by the gas turbine cooling system. Based on the jumping spider optimization algorithm, the pheromone model is improved and an improved jumping spider optimization algorithm (IJSOA) is proposed.
3.2. Improved Jumping Spider Optimization Algorithm
Bio-inspired computer modelling brings solutions from the living phenomena or biological systems to engineering domains [30]. Pheromone is an important way of communication between jumping spiders. The pheromone model of the jumping spider optimization algorithm is derived from the chemical substances that communicate between male and female spiders, parents and children, and between spiders and prey in nature [31]. Pheromones can attract other spiders. By continuously sensing the high concentration of pheromones, more and more spiders will move to places with a high pheromone intensity, resulting in a gradual increase in the probability of spiders selecting the optimal solution. This positive feedback mechanism will also optimize the solution of the problem with the increase in iteration times.
In Equation (19), and respectively, represent the worst and the best fitness values: is the current fitness value of the ith jumping spider, and the fitness value is normalized within the interval (0,1), where 0 is the worst pheromone concentration and 1 is the best. If pheromone concentration is very low, it means that the performance of the jumping spider is poor, so it is necessary to update the current position of the jumping spider according to Equation (20). This method can greatly improve search efficiency and has a strong optimization ability. When applied to the MIMO system represented by the gas turbine cooling system, the “optimal solution” searched is actually a local optimal solution. The controller cannot achieve a good control performance and has an unacceptable overshoot. The pheromone update equation is improved in this paper and this paper also introduces the pheromone volatilization mechanism, which is more in line with the basic laws of nature. The pheromone concentration is updated with the iteration. The volatilization of pheromone is time-dependent and it iterate with the passage of time. Each iteration will pass for a period of time, which means that the pheromone will volatilize. The pheromone update equation is:
where t is time, τ is time interval of each iteration and ρ is pheromone volatilization coefficient. Equation (21) is only based on time. The meaning of time can be understood as that after the iteration time; the volatilization amount of pheromone concentration is equal to the difference between the actual pheromone concentration and the original pheromone concentration. Before judging whether the individual pheromone concentration is less than or equal to 0.3, the pheromone has volatilized with this iteration. As the iteration progresses, when the number of iterations is , Equation (21) is converted into Equation (22).
is the pheromone concentration after updating. “Updating” means the action process of the jumping spider, and it is also the process of this iteration. is the current individual pheromone concentration. When the scale of the problem is relatively large, the existence of ρ will reduce the pheromones of the solutions that have never been searched to almost zero, thus the global search ability of the algorithm is reduced. If ρ is too large, the probability that the previously searched solution will be reselected is too large, which will also affect the randomness and global search ability of the algorithm. Conversely, it can improve the random performance and global search ability of the algorithm by decreasing ρ, which will reduce the convergence speed of the algorithm. The pheromone volatilization coefficient is set to 0.1 in this paper. The pseudo code of the pheromone model is shown in Algorithm 1.
| Algorithm 1 Pheromone model |
|
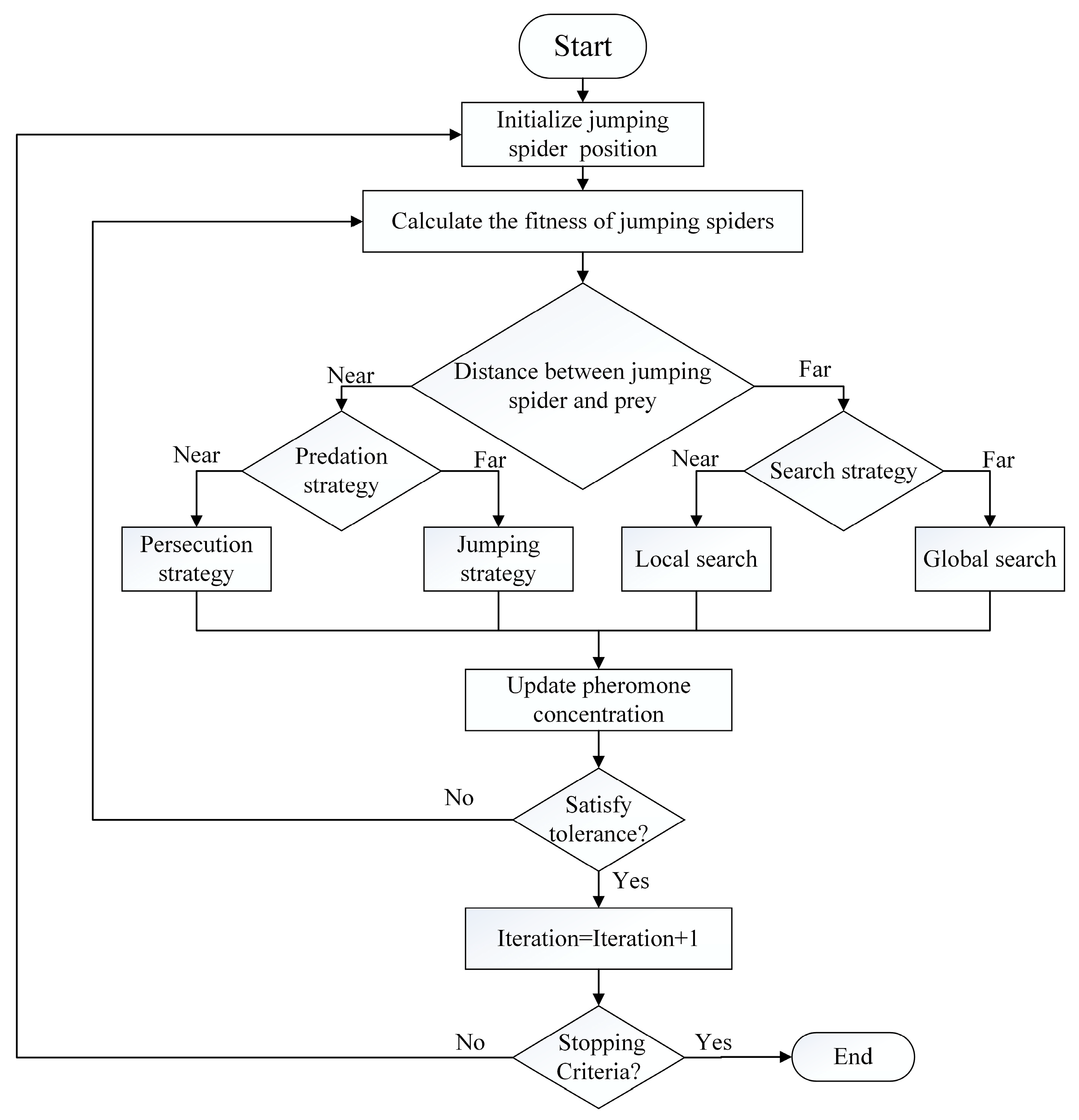
Due to the volatilization mechanism of pheromones, it is more likely that current spiders update their positions to a certain extent according to Equation (20), which means that more spiders have updated their positions than before. This mechanism will increase the global search ability of the jumping spider optimization algorithm, but it will also reduce the convergence speed and increase the operation time of the algorithm. In order to balance the convergence speed and search ability of the algorithm, in this paper a jumping out of the loop strategy is designed. The tolerance of the function change (usually a very small positive number) is defined. The overall flow is shown in Figure 4.
During the iteration process, after calculating the best fitness, the change between the fitness and the current individual fitness (to take the absolute value) is calculated, and the relative size of this change and the tolerance of the function change are judged. In improving the spider jumping optimization algorithm, the position of the best individual in each generation is compared with the position of the current individual. If the “distance” is short, or even less than the tolerance of the function change, the current individual is defaulted as the optimal solution, and the current solution is jumped out, so the jumping spider position is reinitialized, and the next iteration is directly entered. The pseudo code of the jumping out of the loop strategy is shown in Algorithm 2.
| Algorithm 2 Strategy for jumping out of the loop |
|
Noticing that:
- (1)
- When initializing the spider jumping position, the upper and lower bounds of the PID controller parameters are set according to the prior knowledge, which can not only improve the search efficiency, but also prevent the jumping spider from being confused.
- (2)
- When judging which prey or search strategy the jumping spider adopts, a random number of 0–1 is generated in the program. If the random number is greater than or equal to 0.5, the jumping spider is far from the prey, and the corresponding strategy is taken.
- (3)
- When updating the pheromone concentration, if the pheromone concentration of the current individual is low (less than 0.3), the current individual will be reinitialized, which is not shown in the flowchart to make the flowchart more concise.
- (4)
- When comparing the individual fitness and the best fitness, no individual in this iteration satisfies the defined tolerance of the functional variables. The process shown in Figure 4 is not a dead cycle. If no individual satisfies the tolerance in this iteration, the next iteration is carried.
Now, IJSOA, JSOA and PSO were used to adjust the PID controller parameters of the complex MIMO system represented by the gas turbine cooling system, demonstrating the feasibility of the IJSOA.
4. Simulation Results
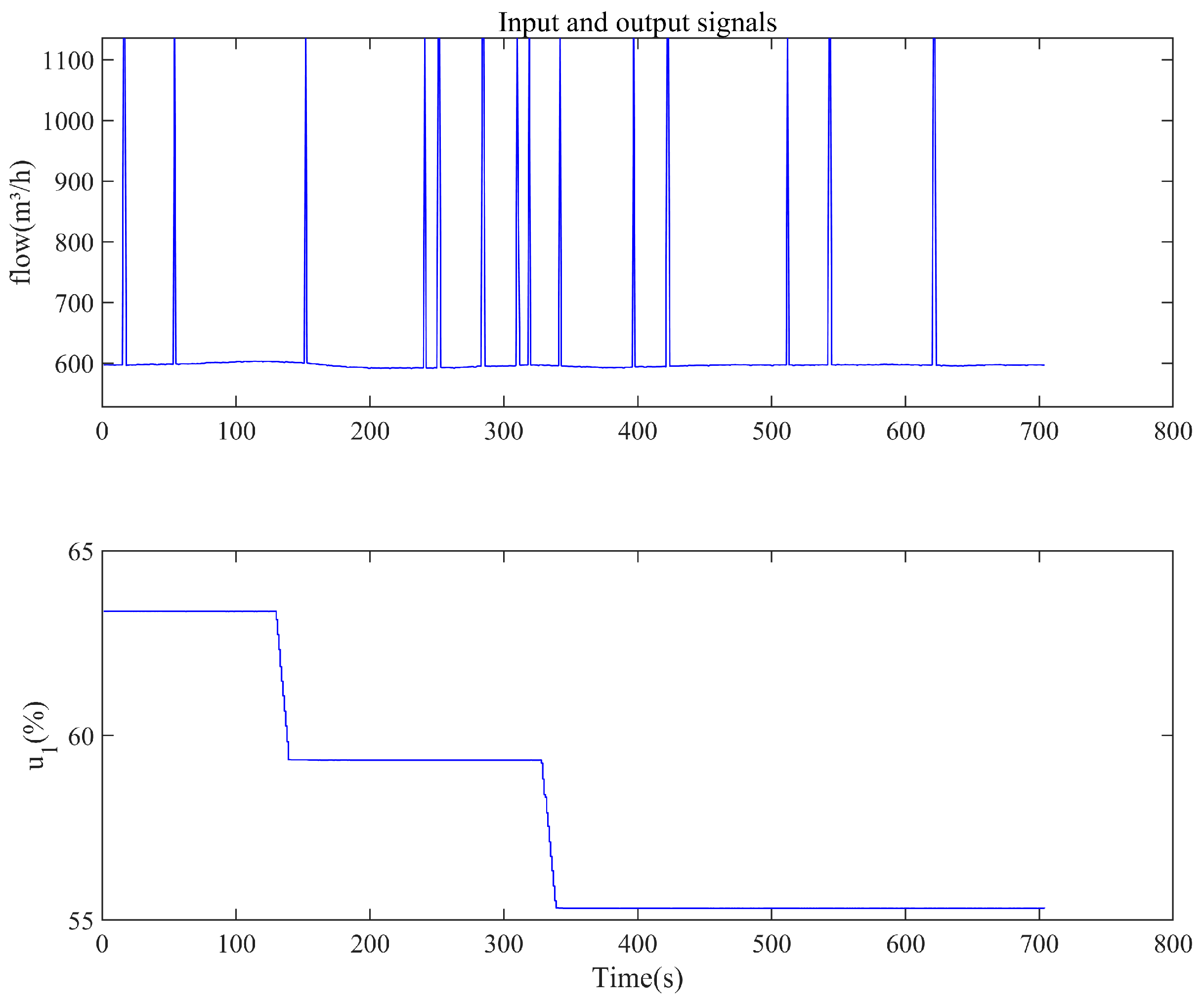
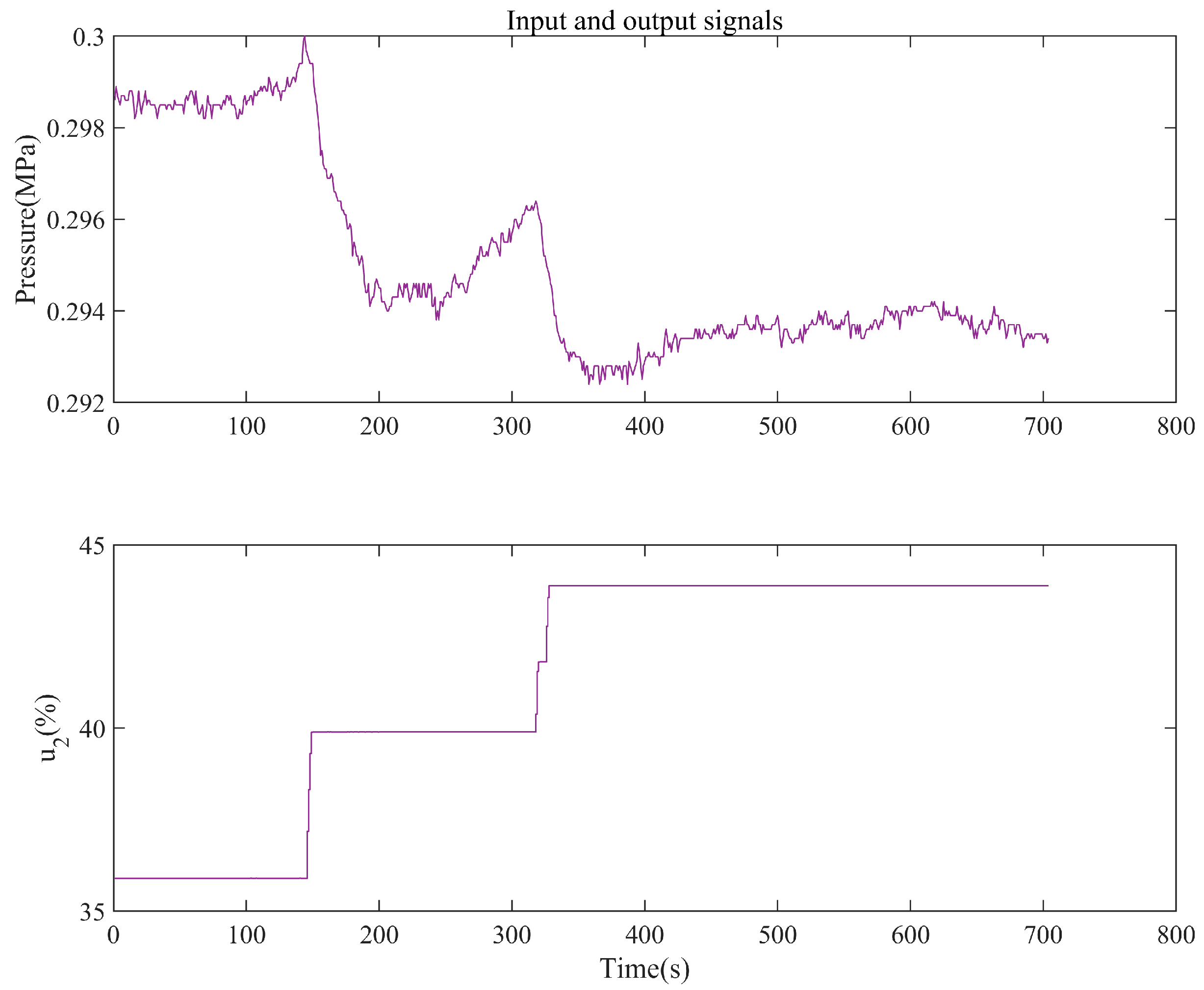
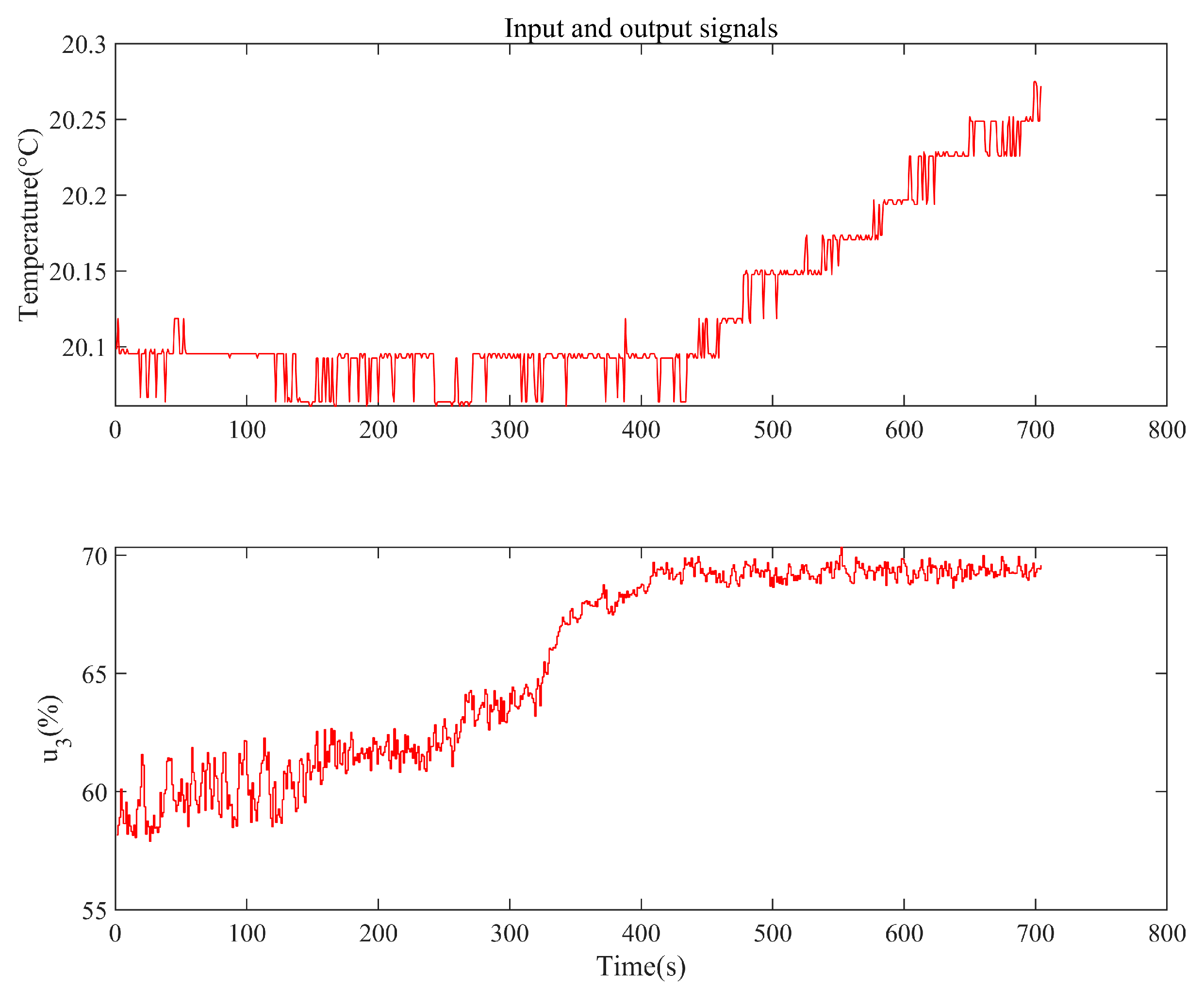
According to the commissioning test of the gas turbine cooling system, the input-output characteristic curves are obtained through the electric control valve position feedback signal and the measurement data of the sensor, as shown in Figure 5, Figure 6 and Figure 7. , and is the opening of the valve and the change of each step opening is almost 5%. The opening of the valve is from 0% to 100%, the converted current signal is 4–20 ma and the converted voltage signal is 0–5 V.
It can be seen from the commissioning test that the gas turbine cooling system is a MIMO system with a strong coupling, nonlinear, time-varying and large disturbance amplitude. It is difficult to manually adjust the opening of the solenoid valve, with a low control accuracy and unstable output variables.
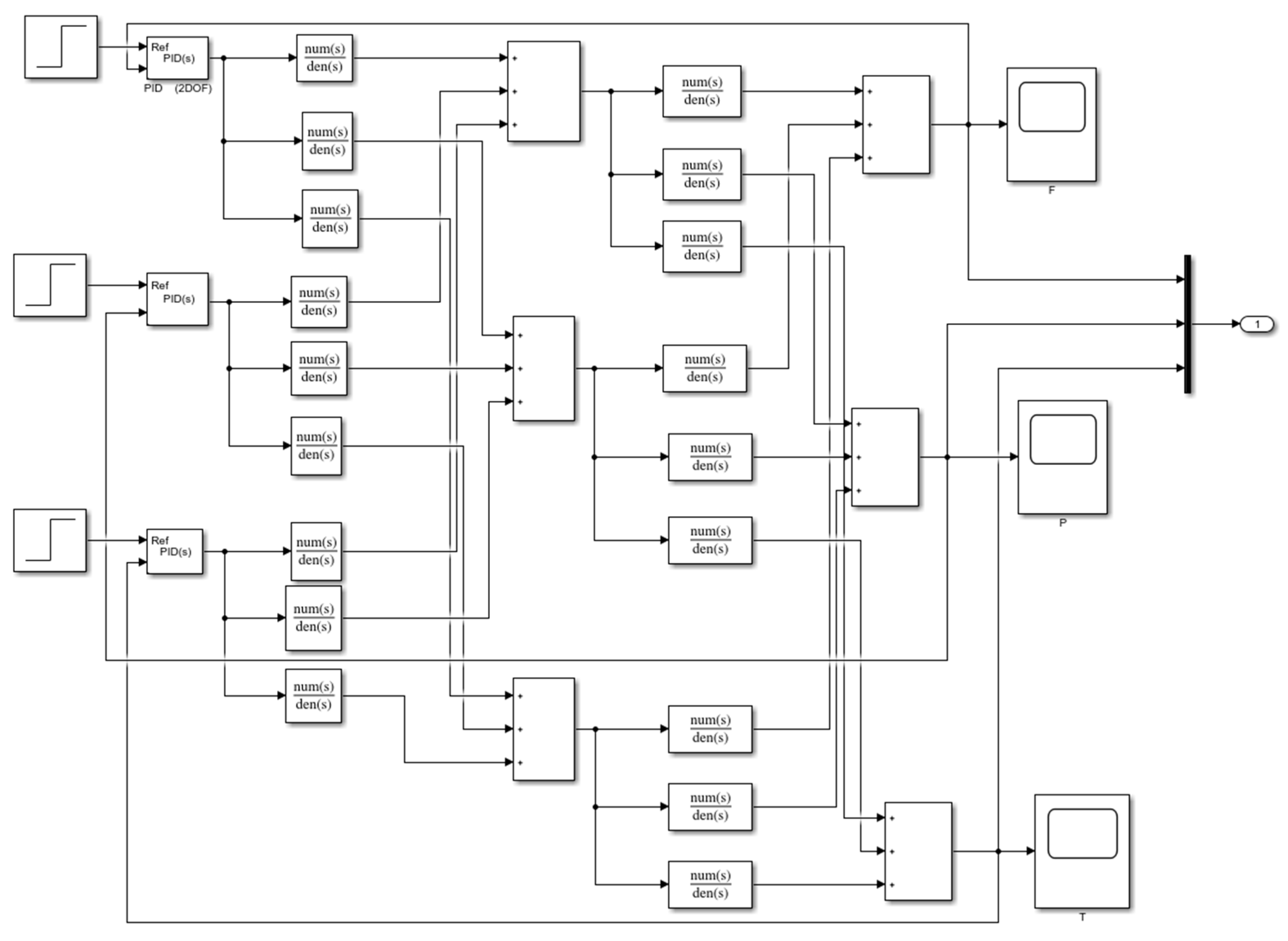
When we use the optimization algorithm to adjust the parameters of the PID controllers, we call the Simulink model by the Sim function firstly, as shown in Figure 8. As described in Figure 3, the model in Figure 8 includes a regulator design, decoupler design and system transfer function model from left to right.
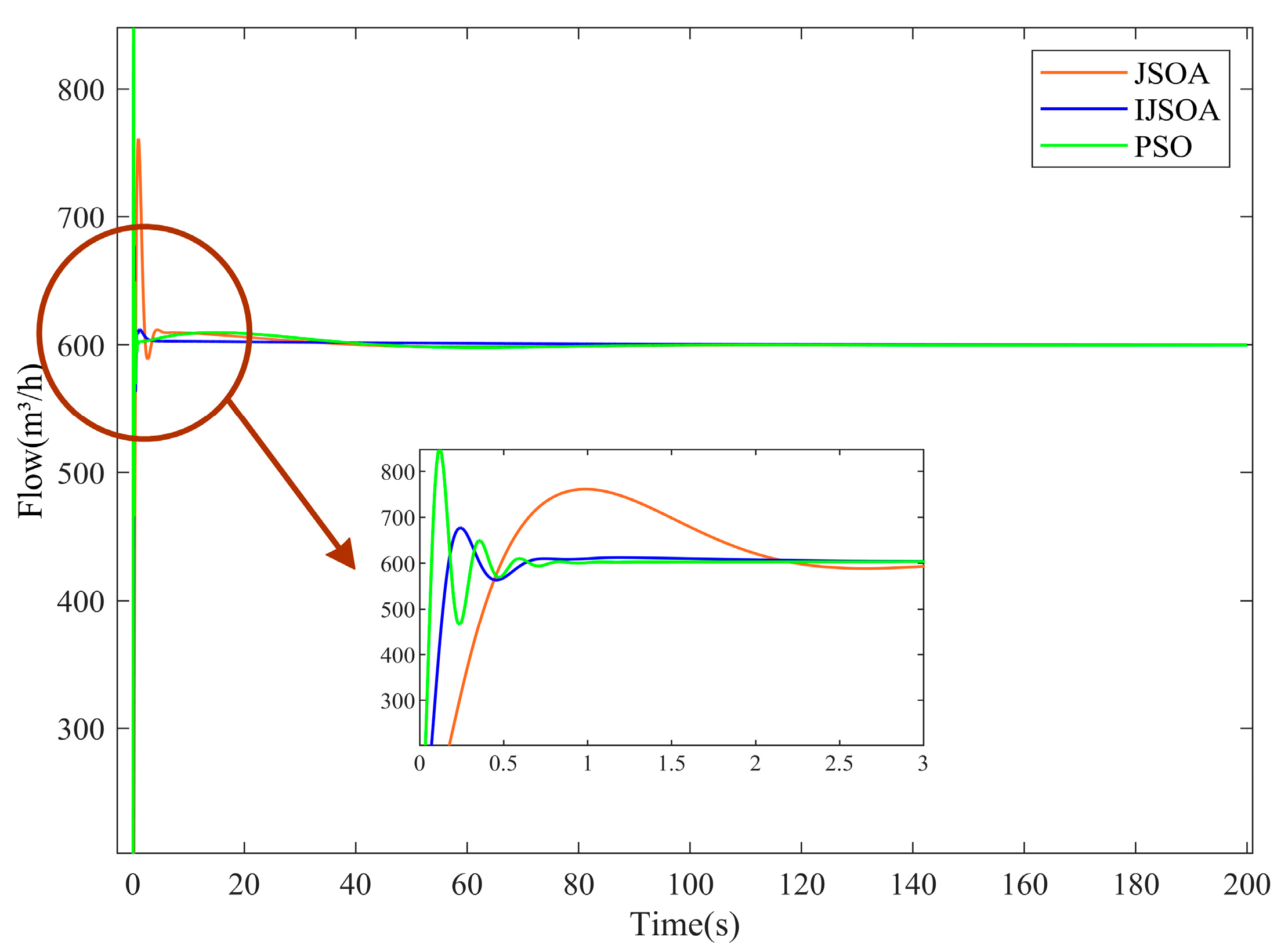
PSO, JSOA and IJSOA are, respectively, used to optimize the parameters of the PID controllers. There are three PID controllers of the gas turbine cooling system, and the controlled variables are the flow, pressure and temperature. The simulation results are as follows: green curve represents PSO, orange curve represents JSOA, and blue curve represents IJSOA, as shown in Figure 9, Figure 10 and Figure 11. All computations were carried out on a standard PC (Win10, Intel(R) core(TM) i5-6300 HQ CPU@ 2.30 GHz, 8 GB) in MATLAB R2018b.
For the flow control, the horizontal axis represents the time and the vertical axis represents the flow value in pipe DN400. The PID controller parameters given by the IJSOA have almost no oscillation, and the transient time, steady-state error and maximum overshoot are better than those of the JSOA and PSO, which shows that the parameters obtained by the IJSOA are the best for the first PID controller. The result of PSO has a large overshoot, which does not mean it is a bad algorithm. In the original data, the flow measured by the flowmeter also fluctuates greatly, and there are many influencing factors, even on-site voltage problems. Compared with PSO and the JSOA, the IJSOA still performs well in the gas turbine cooling system with a large disturbance amplitude.
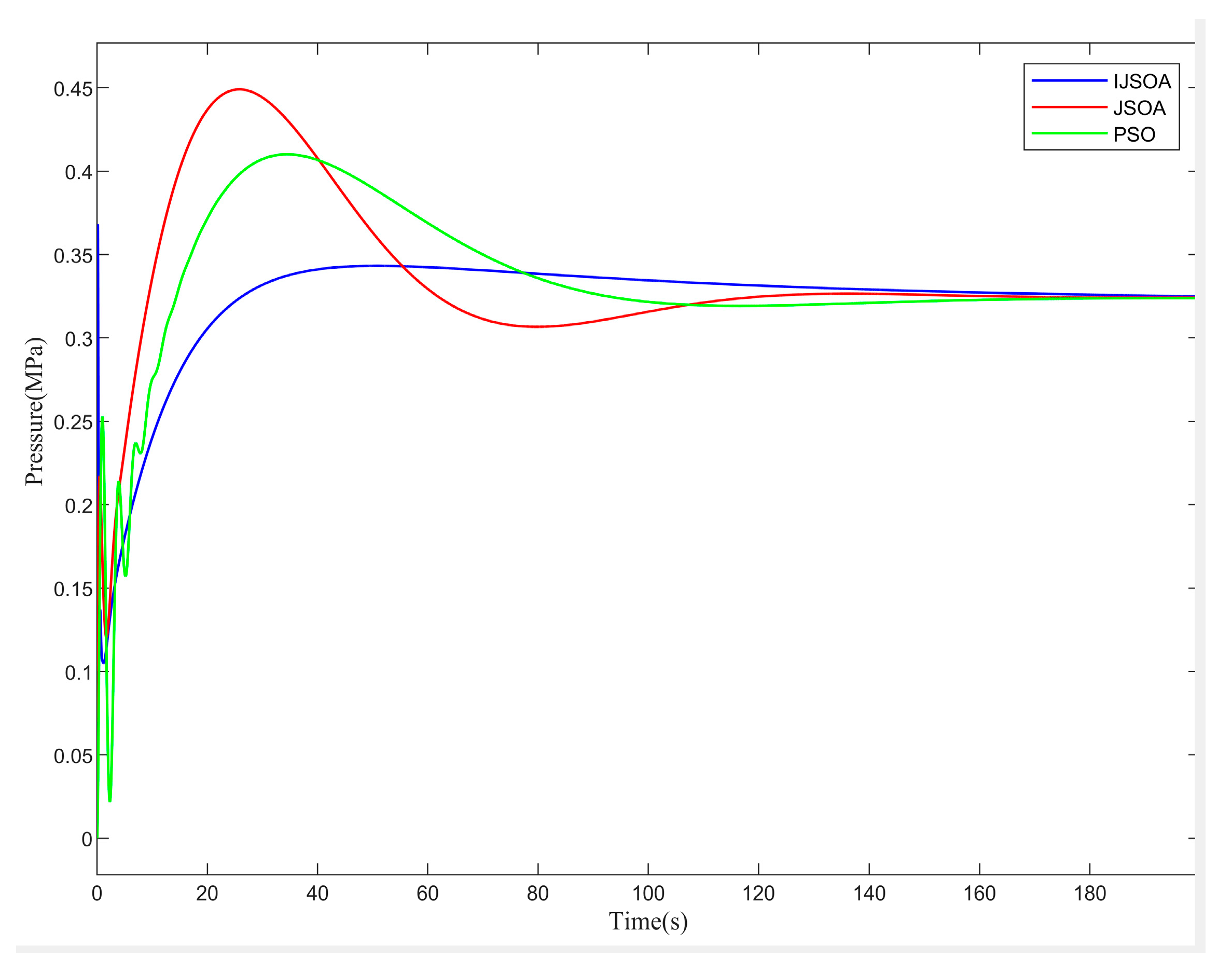
For the pressure control, the curve of the IJSOA is smoother, and there is also no large overshoot. The horizontal axis represents the time and the vertical axis represents the pressure in the main pipe. The steady-state error is small. The adjustment time is almost within 40 s, which is much faster than that of the JSOA and PSO, which shows that the parameters obtained by the IJSOA are the best for the second PID controller.
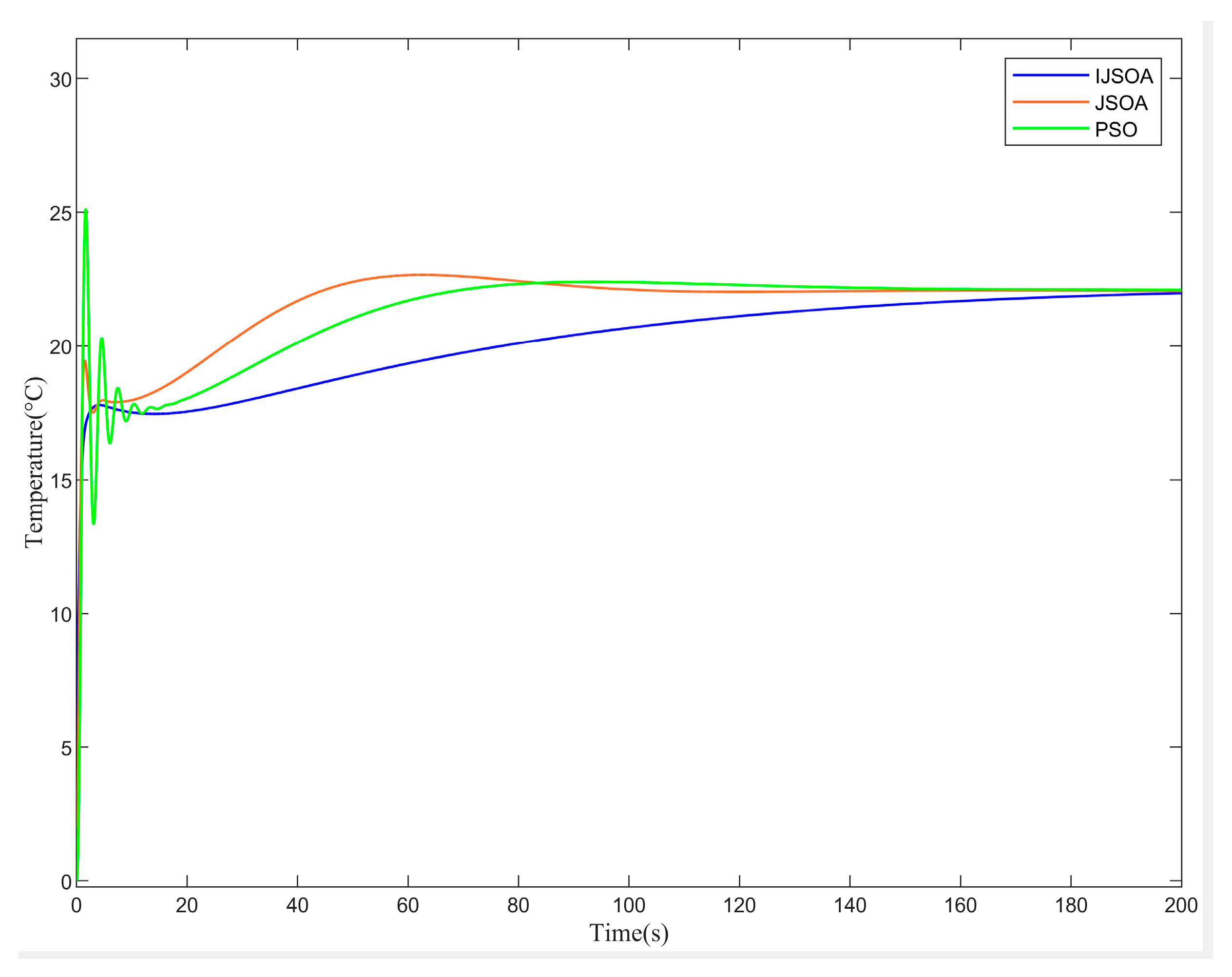
For the temperature control, the optimization result of PSO produces oscillation and the JSOA generates an overshoot. The horizontal axis represents the time and the vertical axis represents the temperature in pipe DN400. Although the adjustment time of the IJSOA is relatively slow, the temperature control is inherently a time-delay. For the gas turbine cooling system, safety and stability are also very important, and the performance of the IJSOA is also acceptable.
Noting that the decoupler designed in Section 2 is not completely decoupled, in fact, for complex MIMO systems, it is almost impossible to achieve complete decoupling. There is still some weak coupling between the controlled variables, which is also different from the single loop PID controller. For the gas turbine cooling system, the IJSOA is better than PSO in terms of control performance. In this paper, a MATLAB profiler is used to record the running time of the three optimization algorithms applied to the PID controller parameter optimization of the gas turbine cooling system, as shown in Table 1.
It can be found from Equations (19) and (20) that if the pheromone concentration is high, jumping spiders will continue to optimize along the current path without re initialization, which can be understood as jumping spiders tend to move in the direction of a high pheromone concentration. Affected by the fitness value, the number of jumping spiders on the good optimization path will increase, and the number of jumping spiders on the bad optimization path will decrease. This positive feedback mechanism enables jumping spiders to gradually search for the optimal result. The volatilization mechanism of pheromones will bring a benefit and if the current fitness value is large, it can be concluded that this jumping spider is almost impossible to be the optimal individual, and the volatilization mechanism of the pheromone will speed up its initialization process. The operation speed of the IJSOA is faster than the JSOA, but slower than PSO. Although a small amount of operation time is sacrificed, which has better performance than PSO. PSO is relatively simple and does not involve many parameters and formulas. The main parameters are position (fitness value) and speed.
The PID controller parameters obtained by the three optimization algorithms are shown in Table 2.
5. Conclusions
The gas turbine cooling system is an important part of the long-term stable operation of the whole gas turbine system, and its control quality is directly related to the safety of the engine system. In order to avoid the risks and difficulties caused by the manual operation of the system, an automatic control system of the gas turbine cooling system is designed in this paper, which includes a regulator and decoupler. The diagonal matrix decoupling method is used in the design of the decoupler and the diagonal matrix decoupling method is used to weaken the correlation between variables. The PID controller is selected. When comparing the optimization algorithms of the PID controller parameter optimization, many optimization algorithms have certain limitations for the MIMO system of the gas turbine cooling system and do not perform well for the gas turbine cooling system. In this paper, an improved jumping spider optimization algorithm is proposed, which improves the update of the pheromone model, improves the global search ability and prevents falling into the local optimal solution. However, this improvement will reduce the original running speed of the algorithm. Therefore, on this basis, a jumping out of the loop strategy is designed to speed up the running speed of the algorithm, so as to balance the global search ability and the convergence speed. For flow control, the transient time reduces by 16.37 s, steady-state errors reduce by 0.37% and overshoot reduces by 14%. For pressure control, the transient time reduces by 84.02 s, steady-state errors reduce by 0.1% and overshoot reduces by 32.23%. For temperature control, steady-state errors reduce by 0.18% and overshoot reduces by 3%. For the controller parameter optimization of the gas turbine cooling system, the simulation results prove that the IJSOA is more suitable for an MIMO gas turbine cooling system with a strong coupling, nonlinear and large disturbance amplitude. Other mathematical forms of the JSOA predation strategies have not been developed, including mixing with other optimization algorithms, such as the sine and cosine algorithm (SCA) and a chaotic map. In addition, the decoupling matrix of the gas turbine cooling system may be complex. The adaptive control of the system by other bionic optimization algorithms or neural networks is currently under development for future work.
Author Contributions
Conceptualization, T.L. (Tianyi Li), Y.L. (Yanmei Liu) and Z.C.; methodology, T.L. (Tianyi Li), Y.L. (Yanmei Liu) and Z.C.; software, T.L. (Tianyi Li) and Y.L. (Yanmei Liu); validation, T.L. (Tianyi Li), Y.L. (Yanmei Liu) and Z.C.; formal analysis, Y.L. (Yanmei Liu); investigation, T.L. (Tianyi Li) and Y.L. (Yanmei Liu); resources, Y.L. (Yanmei Liu); data curation, Y.L. (Yanmei Liu) and Z.C.; writing—original draft preparation, T.L. (Tianyi Li), Y.L. (Yanmei Liu) and Z.C.; writing—review and editing, T.L. (Tianyi Li), Y.L. (Yanmei Liu) and Z.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| Symbols | |
| a | acceleration |
| C | controller matrix |
| D | decoupling matrix |
| fitness value | |
| F | flow |
| g | gravitational acceleration |
| G | coupling system transfer function matrix |
| J | objective function |
| solenoid valve | |
| pressure sensor | |
| P | pressure |
| target water flow | |
| t | time |
| T | temperature |
| inlet temperature | |
| heat exchanger temperature | |
| loop temperature | |
| temperature sensor | |
| opening of valve | |
| initial speed | |
| walk | uniform random number |
| x | position of the individual |
| temperature loss | |
| random number | |
| random number | |
| random number | |
| pheromone volatilization coefficient | |
| τ | time interval |
| Acronyms | |
| IJSOA | Improved jumping spider optimization algorithm |
| JSOA | Jumping spider optimization algorithm |
| PSO | Particle swarm optimization |
References
- Unnikrishnan, U.; Yang, V. A review of cooling technologies for high temperature rotating components in gas turbine. Propuls. Power Res. 2022, in press. [CrossRef]
- Zhang, G.; Zhu, R.; Xie, G.; Li, S.; Sundén, B. Optimization of cooling structures in gas turbines: A review. Chin. J. Aeronaut. 2022, 35, 18–46. [Google Scholar] [CrossRef]
- Boksenbom, A.S.; Hood, R. General Algebraic Method Applied to Control Analysis of Complex Engine Types; Techinical Report NCA-TR-980; National Advisory Committee for Aeronautics: Washington, DC, USA, 1950.
- Liu, L.; Tian, S.; Xue, D.; Zhang, T.; Chen, Y.; Zhang, S. A Review of Industrial MIMO Decoupling Control. Int. J. Control Autom. Syst. 2019, 17, 1246–1254. [Google Scholar] [CrossRef]
- Ram, V.D.; Chidambaram, M. Simple method of designing centralized PI controllers for multivariable systems based on SSGM. ISA Trans. 2015, 56, 252–260. [Google Scholar] [CrossRef]
- Li, Z.; Chen, Y. Ideal, Simplified and Inverted Decoupling of Fractional Order TITO Processes. IFAC Proc. Vol. 2014, 47, 2897–2902. [Google Scholar] [CrossRef] [Green Version]
- Peng, K.; Zhang, Z.; Yang, F.; Jiao, C. Multivariable Decoupling Control of Aviation Turbofan Engines. IFAC-PapersOnLine 2021, 54, 460–464. [Google Scholar] [CrossRef]
- Hägglund, T.; Shinde, S.; Theorin, A.; Thomsen, U. An industrial control loop decoupler for process control applications. Control Eng. Pract. 2022, 123, 105138. [Google Scholar] [CrossRef]
- Seyedali, M.; Jin, S.D.; Andrew, L.; Ali, S.S. Particle Swarm Optimization: Theory, Literature Review, and Application in Airfoil Design. In Nature-Inspired Optimizers. Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2020; Volume 811, pp. 167–184. [Google Scholar]
- Sourabh, K.; Sumit, C.S.; Vijay, K. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar]
- Zhao, H.; Zhang, C. An ant colony optimization algorithm with evolutionary experience-guided pheromone updating strategies for multi-objective optimization. Expert Syst. Appl. 2022, 201, 117151. [Google Scholar] [CrossRef]
- Yang, R.; Liu, Y.; Yu, Y.; He, X.; Li, H. Hybrid improved particle swarm optimization-cuckoo search optimized fuzzy PID controller for micro gas turbine. Energy Rep. 2021, 7, 5446–5454. [Google Scholar] [CrossRef]
- Altintas, G.; Aydin, Y. Optimization of Fractional and Integer Order PID Parameters using Big Bang Big Crunch and Genetic Algorithms for a MAGLEV System. IFAC-PapersOnLine 2017, 50, 4881–4886. [Google Scholar] [CrossRef]
- Jia, L.; Zhao, X. An Improved Particle Swarm Optimization (PSO) Optimized Integral Separation PID and its Application on Central Position Control System. IEEE Sens. J. 2019, 19, 7064–7071. [Google Scholar] [CrossRef]
- Li, S.; Chi, X.; Yu, B. An improved particle swarm optimization algorithm for the reliability–redundancy allocation problem with global reliability. Reliab. Eng. Syst. Saf. 2022, 225, 108604. [Google Scholar] [CrossRef]
- Su, B.; Lin, Y.; Wang, J.; Quan, X.; Chang, Z.; Rui, C. Sewage treatment system for improving energy efficiency based on particle swarm optimization algorithm. Energy Rep. 2022, 8, 8701–8708. [Google Scholar] [CrossRef]
- Peng, Z. PID Control of Temperature and Humidity in Granary Based on Improved Genetic Algorithm. In Proceedings of the 2019 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 12–14 July 2019; pp. 428–432. [Google Scholar] [CrossRef]
- Misaghi, M.; Yaghoobi, M. Improved invasive weed optimization algorithm (IWO) based on chaos theory for optimal design of PID controller. J. Comput. Des. Eng. 2019, 6, 284–295. [Google Scholar] [CrossRef]
- Fu, Y.; Zhou, M.; Guo, X.; Qi, L.; Sedraoui, K. Multiverse Optimization Algorithm for Stochastic Biobjective Disassembly Sequence Planning Subject to Operation Failures. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 1041–1051. [Google Scholar] [CrossRef]
- Peraza-Vázquez, H.; Peña-Delgado, A.F.; Echavarría-Castillo, G.; Morales-Cepeda, A.B.; Velasco-Álvarez, J.; Ruiz-Perez, F. A Bio-Inspired Method for Engineering Design Optimization Inspired by Dingoes Hunting Strategies. Math. Probl. Eng. 2021, 2021, 9107547. [Google Scholar] [CrossRef]
- Vanchinathan, K.; Selvaganesan, N. Adaptive fractional order PID controller tuning for brushless DC motor using Artificial Bee Colony algorithm. Results Control Optim. 2021, 4, 100032. [Google Scholar] [CrossRef]
- Peraza-Vázquez, H.; Peña-Delgado, A.; Ranjan, P.; Barde, C.; Choubey, A.; Morales-Cepeda, A.B. A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade. Mathematics 2021, 10, 102. [Google Scholar] [CrossRef]
- Mahfoud, S.; Derouich, A.; El Ouanjli, N.; Mossa, M.A.; Bhaskar, M.S.; Lan, N.K.; Quynh, N.V. A New Robust Direct Torque Control Based on a Genetic Algorithm for a Doubly-Fed Induction Motor: Experimental Validation. Energies 2022, 15, 5384. [Google Scholar] [CrossRef]
- El Ouanjli, N.; Mahfoud, S.; Bhaskar, M.S.; El Daoudi, S.; Derouich, A.; El Mahfoud, M. A new intelligent adaptation mechanism of MRAS based on a genetic algorithm applied to speed sensorless direct torque control for induction motor. Int. J. Dyn. Control 2022, 10, 1–16. [Google Scholar] [CrossRef]
- Jayaudhaya, J.; Kumar, K.R.; Selvi, V.T.; Padmavathi, N. Improved Performance Analysis of PV Array Model Using Flower Pollination Algorithm and Gray Wolf Optimization Algorithm. Math. Probl. Eng. 2022, 2022, 5803771. [Google Scholar] [CrossRef]
- Alanazi, A.; Alanazi, M.; Arabi, S.; Sarker, S. A New Maximum Power Point Tracking Framework for Photovoltaic Energy Systems Based on Remora Optimization Algorithm in Partial Shading Conditions. Appl. Sci. 2022, 12, 3828. [Google Scholar] [CrossRef]
- Nematollahi, M.; Porkhial, S.; Hassanabad, M.G. Using two novel integrated systems to cool the air toward the ISO condition at the gas turbine inlet. Energy 2021, 243, 122724. [Google Scholar] [CrossRef]
- Jin, W.; Jia, Y.X.; Lei, J.; Ji, W.T.; Wu, J.M. Coupled heat transfer analysis of internal and film cooling of turbine blade under medium temperature conditions. Appl. Therm. Eng. 2022, 214, 118792. [Google Scholar] [CrossRef]
- Peña-Delgado, A.F.; Peraza-Vázquez, H.; Almazán-Covarrubias, J.H.; Cruz, N.T.; García-Vite, P.M.; Morales-Cepeda, A.B.; Ramirez-Arredondo, J.M. A Novel Bio-Inspired Algorithm Applied to Selective Harmonic Elimination in a Three-Phase Eleven-Level Inverter. Math. Probl. Eng. 2020, 2020, 8856040. [Google Scholar] [CrossRef]
- Zhao, P.; Zhang, Y.; Hua, Q.; Li, H.; Wen, Z. Bio-Inspired Optimal Dispatching of Wind Power Consumption Considering Multi-Time Scale Demand Response and High-Energy Load Participation. Comput. Model. Eng. Sci. 2023, 134, 957–979. [Google Scholar] [CrossRef]
- Schulz, S. Spider Pheromones—A Structural Perspective. J. Chem. Ecol. 2013, 39, 1–14. [Google Scholar] [CrossRef]
Figure 1.
Gas turbine cooling system.

Figure 2.
General structure of a decoupled system.

Figure 3.
Block diagram of gas turbine cooling system.

Figure 4.
IJSOA flowchart.

Figure 5.
Feedback of solenoid valve DN400 and electromagnetic flowmeter.

Figure 6.
Feedback of solenoid valve DN200 and outlet pressure of water reservoir.

Figure 7.
Feedback of solenoid valve DN300 and inlet temperature of cold module.

Figure 8.
Simulation block diagram of gas turbine cooling system.

Figure 9.
Comparison of flow control effect.

Figure 10.
Comparison of pressure control effect.

Figure 11.
Comparison of temperature control effect.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Table caption Profiler results.
| Algorithms | Run Time |
|---|---|
| IJSOA | 187 s |
| JSOA | 232 s |
| PSO | 167 s |
Table 2.
PID parameters.
| IJSOA | JSOA | PSO | |
|---|---|---|---|
| 0.1592 | 0.0827 | 0.0332 | |
| 0.1409 | 0.1360 | 0.1423 | |
| 5.8471 × 10−6 | 1.5369 × 10−5 | 3.6027 × 10−5 | |
| 0.0262 | 0.0874 | 0.0257 | |
| 0.0099 | 0.0199 | 0.0013 | |
| 1.5607 × 10−5 | 2.1097 × 10−5 | 5.6253 × 10−6 | |
| 2.8095 | 2.9191 | 2.1691 | |
| 0.8900 | 0.8909 | 0.9214 | |
| 4.9470 × 10−5 | 2.1286 × 10−5 | 8.6424 × 10−6 |
Table 3.
Transient time.
| IJSOA | JSOA | PSO | |
|---|---|---|---|
| Flow | 5.98 s | 22.35 s | 30.32 s |
| Pressure | 40.58 s | 124.6 s | 118.2 s |
| Temperature | 167.3 s | 87.4 s | 133.5 s |
Table 4.
Steady-State errors.
| IJSOA | JSOA | PSO | |
|---|---|---|---|
| Flow | 0.46% | 0.83% | 0.88% |
| Pressure | 1.1% | 1.2% | 1.1% |
| Temperature | 0.09% | 0.27% | 0.45% |
Table 5.
Overshoot.
| IJSOA | JSOA | PSO | |
|---|---|---|---|
| Flow | 12.8% | 26.8% | 41.7% |
| Pressure | 3.87% | 36.1% | 24.2% |
| Temperature | 0% | 3% | 14.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, T.; Liu, Y.; Chen, Z. Design of Gas Turbine Cooling System Based on Improved Jumping Spider Optimization Algorithm. Machines 2022, 10, 909. https://0-doi-org.brum.beds.ac.uk/10.3390/machines10100909
AMA Style
Li T, Liu Y, Chen Z. Design of Gas Turbine Cooling System Based on Improved Jumping Spider Optimization Algorithm. Machines. 2022; 10(10):909. https://0-doi-org.brum.beds.ac.uk/10.3390/machines10100909
Chicago/Turabian StyleLi, Tianyi, Yanmei Liu, and Zhen Chen. 2022. "Design of Gas Turbine Cooling System Based on Improved Jumping Spider Optimization Algorithm" Machines 10, no. 10: 909. https://0-doi-org.brum.beds.ac.uk/10.3390/machines10100909
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.