
Sensitivity Analysis for Multi-Objective Optimization of Switched Reluctance Motors

 , , ,
, , , 
Abstract
:1. Introduction
2. Switched Reluctance Motor
2.1. SRM Working Principle
2.2. Torque Ripple
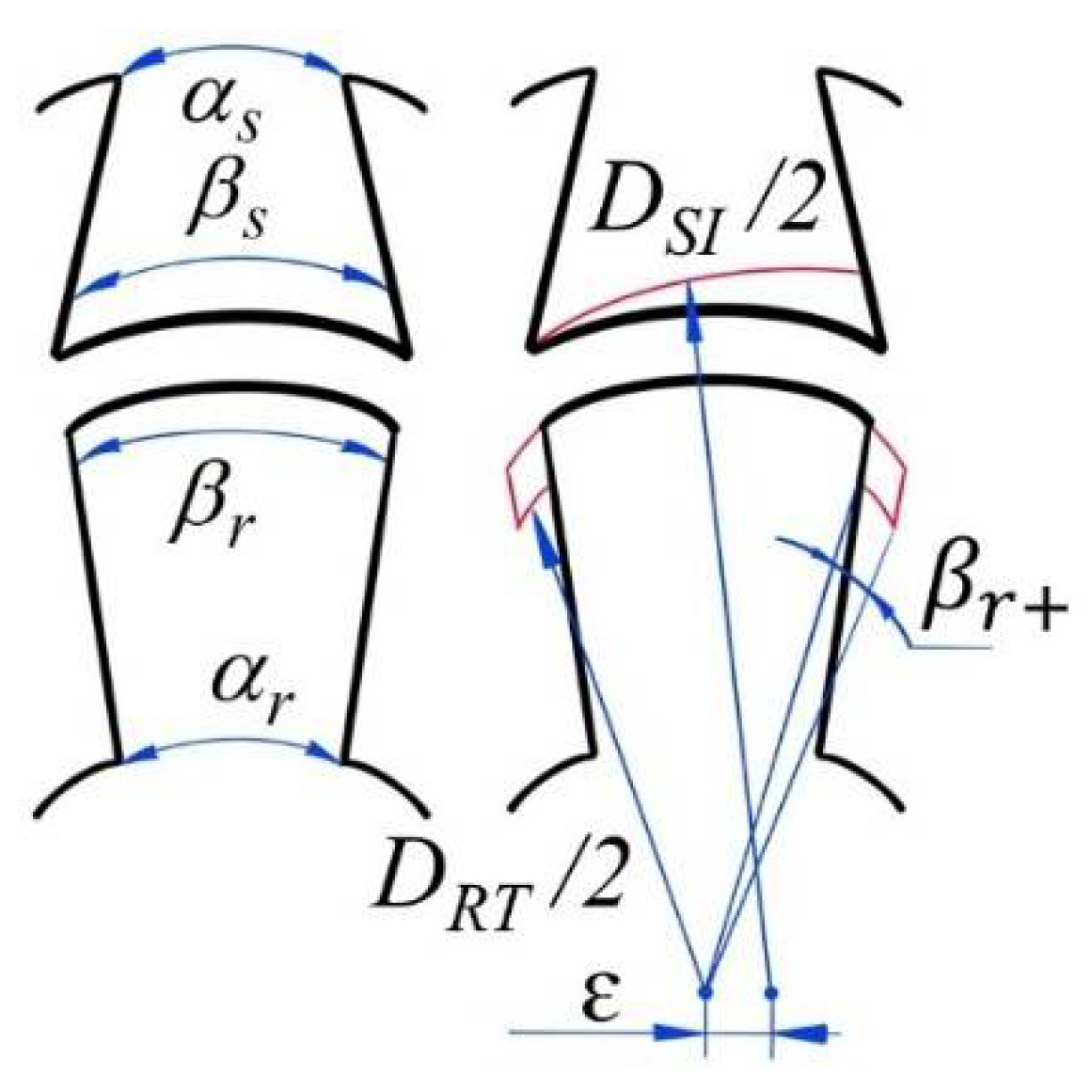
2.3. Geometrical Parameters of SRM
3. Case Study
3.1. Design Model of SRM
3.2. Taguchi Method

| Specification/Geometry Characteristic | Symbol | Value |
|---|---|---|
| Phase resistance | R | 5 Ω |
| Stack length | L | 60 mm |
| Stator outer diameter | DSO | 103 mm |
| Stator inner diameter | DSI | 60 mm |
| Stator slot depth | SD | 14.8 mm |
| Rotor inner diameter | DRI | 22 mm |
| Stator/rotor pole angle | βS/βR | 28.5/29.1° |
| Air-gap length | a | 0.25 mm |
| Average three-phase torque | Tav | 1.34 Nm |
| Torque ripple coefficient | K | 2.03 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

4. Results
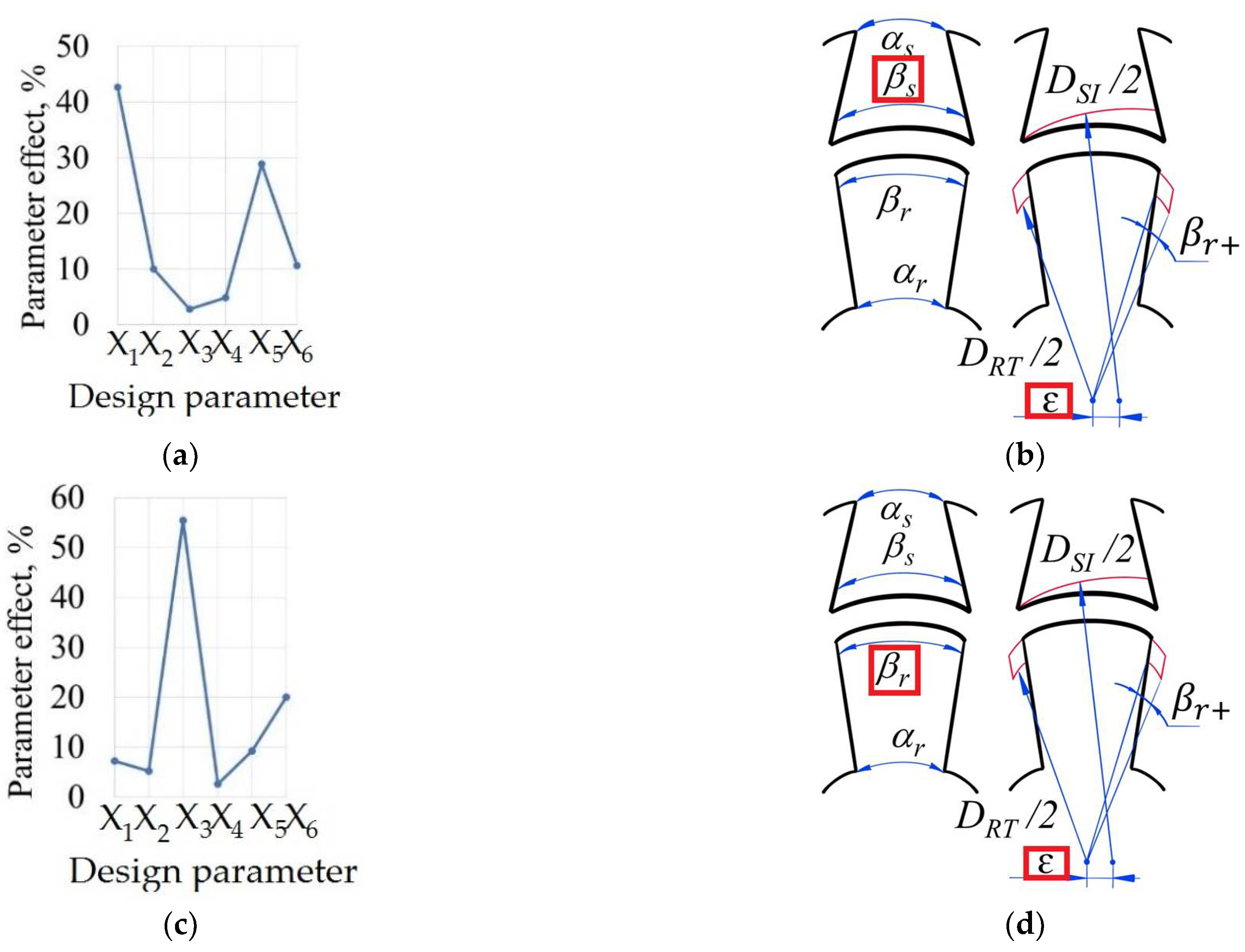
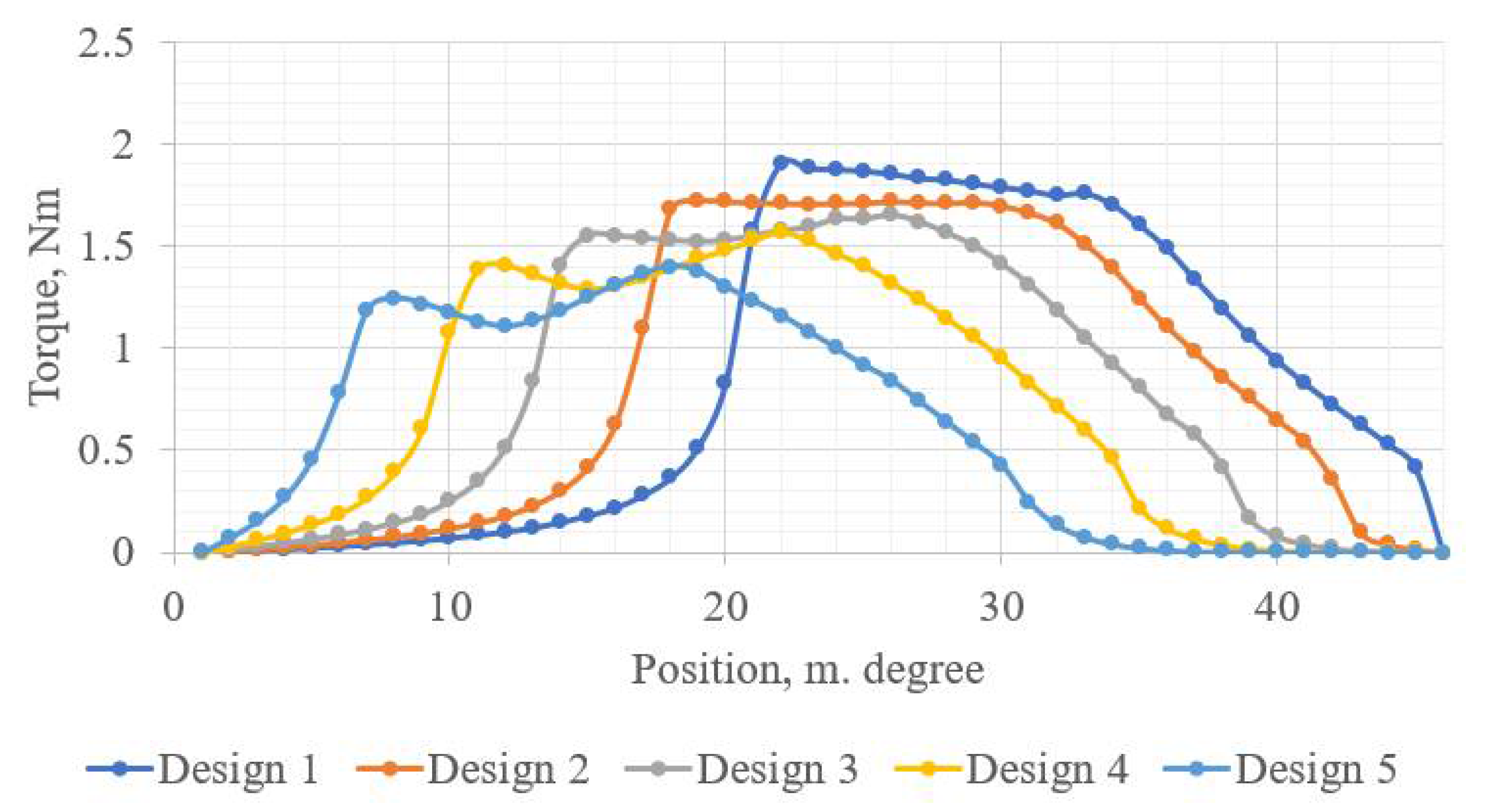
4.1. Results of the Sensitivity Analysis
- Stator pole angle has a major influence on the average torque. The increase in the stator pole angle leads to a wider torque production region and higher average torque.
- The growth of the airgap shift has a positive influence on the torque ripple reduction and a negative influence on the average torque. The airgap shift raises the torque at the end of the growing inductance phase. However, the air-gap shift is a sensitive parameter, and its value should be selected carefully.
- The increase in the rotor pole angle has a negative effect on the torque ripple. With the growth of the rotor pole angle, the torque curve shifts to the beginning of the torque production phase. To avoid the torque ripple with the increase in the rotor pole angle, the control turn-on and turn-off angles should be adjusted according to the area of torque production.
- The introduction of the rotor pole angle within this SRM design leads to an increase in torque ripples. The possible explanation can be an improper selection of its values.
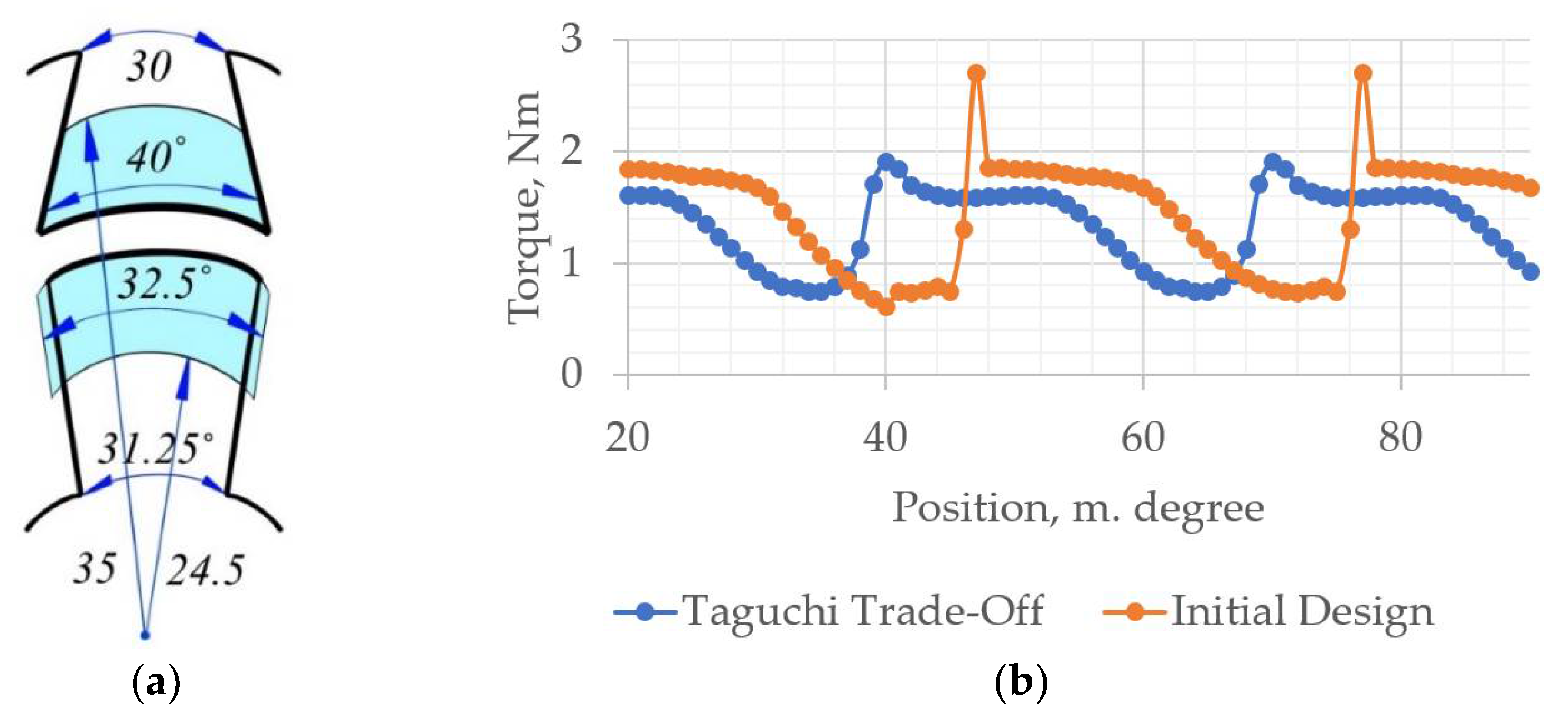
4.2. Topology Optimization Design Space Definition
- Stator pole angle was set to 40°, pursuing the best combination of maximum average torque and minimum torque ripple.
- Stator pole angle at the core was set to 30°, insuring almost the lowest torque ripple and reasonably high torque.
- The rotor pole angle and rotor pole angle at the core were set to 28.75° and 60°, respectively, trying to achieve the minimum torque ripple and keep the average torque ripple at the average level.
- Due to the high influence of the airgap shift and the low influence of the core angles on the objective functions, the depth of the TO domain was set to 5 mm.
- The possible additional angle for the rotor teeth was set to ±1.875° due to the highly negative influence of the additional teeth after 1.875 on both the average torque and torque ripple.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rahman, K.M.; Fahimi, B.; Suresh, G.; Rajarathnam, A.V.; Ehsani, M. Advantages of switched reluctance motor applications to EV and HEV: Design and control issues. IEEE Trans. Ind. Appl. 2000, 36, 111–121. [Google Scholar] [CrossRef]
- Li, S.; Zhang, S.; Habetler, T.G.; Harley, R.G. Modeling, design optimization, and applications of switched reluctance machines—A review. IEEE Trans. Ind. Appl. 2019, 55, 2660–2681. [Google Scholar] [CrossRef]
- Madhavan, R.; Fernandes, B.G. Performance improvement in the axial flux-segmented rotor-switched reluctance motor. IEEE Trans. Energy Convers. 2014, 29, 641–651. [Google Scholar] [CrossRef]
- Lin, Z.; Reay, D.S.; Williams, B.W.; He, X. Online modeling for switched reluctance motors using b-spline neural networks. IEEE Trans. Ind. Electron. 2007, 54, 3317–3322. [Google Scholar] [CrossRef]
- Ma, C.; Qu, L. Design Considerations of Switched ReluctanceMotors with Bipolar Excitation for Low TorqueRipple Applications. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; Available online: https://digitalcommons.unl.edu/electricalengineeringfacpub/295 (accessed on 14 March 2022).
- Wang, W.; Luo, M.; Cosoroaba, E.; Fahimi, B.; Kiani, M. Rotor shape investigation and optimization of double stator switched reluctance machine. IEEE Trans. Magn. 2015, 51, 8103304. [Google Scholar] [CrossRef]
- Lee, J.W.; Kim, H.S.; Kwon, B.I.; Kim, B.T. New rotor shape design for minimum torque ripple of SRM using FEM. IEEE Trans. Magn. 2004, 40, 754–757. [Google Scholar] [CrossRef]
- Li, G.-J.; Ojeda, J.; Hlioui, S.; Hoang, E.; Lecrivain, M.; Gabsi, M. Modification in rotor pole geometry of mutually coupled switched reluctance machine for torque ripple mitigating. IEEE Trans. Magn. 2012, 48, 2025–2034. [Google Scholar] [CrossRef]
- Choi, Y.K.; Yoon, H.S.; Koh, C.S. Pole-shape optimization of a switched-reluctance motor for torque ripple reduction. IEEE Trans. Magn. 2007, 43, 1797–1800. [Google Scholar] [CrossRef]
- Sheth, N.; Rajagopal, K. Optimum Pole Arcs for a Switched Reluctance Motor for Higher Torque with Reduced Ripple. IEEE Trans. Magn. 2003, 39, 3214–3216. [Google Scholar] [CrossRef]
- Chen, H.; Yan, W.; Gu, J.J.; Sun, M. Multiobjective Optimization Design of a Switched Reluctance Motor for Low-Speed Electric Vehicles with a Taguchi-CSO Algorithm. IEEE/ASME Trans. Mechatron. 2018, 23, 1762–1774. [Google Scholar] [CrossRef]
- Omekanda, A.M. Robust torque and torque-per-inertia optimization of a switched reluctance motor using the Taguchi methods. IEEE Trans. Ind. Appl. 2006, 42, 473–478. [Google Scholar] [CrossRef]
- Hidaka, Y.; Igarashi, H. Topology Optimization of Synchronous Reluctance Motors Considering Localized Magnetic Degradation Caused by Punching. IEEE Trans. Magn. 2017, 53, 7000804. [Google Scholar] [CrossRef]
- Sato, S.; Sato, T.; Igarashi, H. Topology optimization of synchronous reluctance motor using normalized gaussian network. IEEE Trans. Magn. 2015, 51, 8200904. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Wang, S. Topology Optimization of Rotor Pole in Switched Reluctance Motor for Minimum Torque Ripple, Electric Power Components and Systems. Electr. Power Compon. Syst. 2017, 45, 905–911. [Google Scholar] [CrossRef]
- Okamoto, Y.; Hoshino, R.; Wakao, S.; Tsuburaya, T. Improvement of torque characteristics for a synchronous reluctance motor using MMA-based topology optimization method. IEEE Trans. Magn. 2017, 54, 7203104. [Google Scholar] [CrossRef]
- Ishikawa, T.; Yonetake, K.; Kurita, N. An optimal material distribution design of brushless DC motor by genetic algorithm considering a cluster of material. IEEE Trans. Magn. 2011, 47, 1310–1313. [Google Scholar] [CrossRef]
- DWhite, D.A.; Arrighi, W.J.; Kudo, J.; Watts, S.E. Multiscale topology optimization using neural network surrogate models. Comput. Methods Appl. Mech. Eng. 2019, 346, 1118–1135. [Google Scholar] [CrossRef]
- Andriushchenko, E.; Kallaste, A.; Belahcen, A.; Vaimann, T.; Rassõlkin, A.; Heidari, H.; Tiismus, H. Optimization of a 3D-Printed Permanent Magnet Coupling Using Genetic Algorithm and Taguchi Method. Electronics 2021, 10, 494. [Google Scholar] [CrossRef]
- Andriushchenko, E.; Kaska, J.; Kallaste, A.; Belahcen, A.; Vaimann, T.; Rassõlkin, A. Design Optimization of Permanent Magnet Clutch with Ārtap Framework. Period. Polytech. Electr. Eng. Comput. Sci. 2021, 65, 106–112. [Google Scholar] [CrossRef]
















| Design Parameter/Control Factor | Symbol | Factor | Level | ||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||
| Stator pole angle (˚) | βs = X1 | X1 | 25 | 28.75 | 32.5 | 36.25 | 40 |
| Stator pole angle at core (˚) | αs= βs – X2 | X2 | 5 | 7.5 | 10 | 12.5 | 15 |
| Rotor pole angle (˚) | βr = X3 | X3 | 25 | 28.75 | 32.5 | 36.25 | 40 |
| Rotor pole angle at core (˚) | αr= βr + X4 | X4 | 25 | 31.25 | 37.5 | 43.75 | 50 |
| Airgap shift, mm | ɛ =X5 | X5 | 0 | 0.25 | 0.5 | 0.75 | 1 |
| Additional tooth angle (˚) | βr+ = X6/2 | X6 | 0 | 3.75 | 7.5 | 11.25 | 15 |
| Experiment | Control Factor | Average Torque | Torque Ripple Coefficient | |||||
|---|---|---|---|---|---|---|---|---|
| X1 | X2 | X3 | X4 | X5 | X6 | |||
| 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.851 | 1.22 |
| 2 | 1 | 2 | 2 | 2 | 2 | 2 | 0.838 | 1.06 |
| 3 | 1 | 3 | 3 | 3 | 3 | 3 | 0.790 | 1.36 |
| 4 | 1 | 4 | 4 | 4 | 4 | 4 | 0.716 | 1.55 |
| 5 | 1 | 5 | 5 | 5 | 5 | 5 | 0.614 | 1.73 |
| 6 | 2 | 1 | 2 | 3 | 4 | 5 | 0.808 | 1.16 |
| 7 | 2 | 2 | 3 | 4 | 5 | 1 | 0.792 | 1.06 |
| 8 | 2 | 3 | 4 | 5 | 1 | 2 | 0.899 | 1.37 |
| 9 | 2 | 4 | 5 | 1 | 2 | 3 | 0.850 | 1.39 |
| 10 | 2 | 5 | 1 | 2 | 3 | 4 | 0.812 | 0.95 |
| 11 | 3 | 1 | 3 | 5 | 2 | 4 | 0.887 | 1.53 |
| 12 | 3 | 2 | 4 | 1 | 3 | 5 | 0.829 | 1.55 |
| 13 | 3 | 3 | 5 | 2 | 4 | 1 | 0.837 | 1.19 |
| 14 | 3 | 4 | 1 | 3 | 5 | 2 | 0.796 | 0.92 |
| 15 | 3 | 5 | 2 | 4 | 1 | 3 | 0.930 | 1.25 |
| 16 | 4 | 1 | 4 | 2 | 5 | 3 | 0.936 | 1.52 |
| 17 | 4 | 2 | 5 | 3 | 1 | 4 | 0.878 | 1.72 |
| 18 | 4 | 3 | 1 | 4 | 2 | 5 | 0.907 | 1.30 |
| 19 | 4 | 4 | 2 | 5 | 3 | 1 | 0.855 | 0.92 |
| 20 | 4 | 5 | 3 | 1 | 4 | 2 | 0.856 | 1.02 |
| 21 | 5 | 1 | 5 | 4 | 3 | 2 | 0.935 | 1.52 |
| 22 | 5 | 2 | 1 | 5 | 4 | 3 | 0.847 | 0.94 |
| 23 | 5 | 3 | 2 | 1 | 5 | 4 | 0.826 | 1.00 |
| 24 | 5 | 4 | 3 | 2 | 1 | 5 | 0.901 | 1.43 |
| 25 | 5 | 5 | 4 | 3 | 2 | 1 | 0.910 | 1.26 |
| Control Factor | 1st Optimal Design | 2nd Optimal Design | Trade-Off Design |
|---|---|---|---|
| X1 | 4 | 2 | 5 |
| X2 | 1 | 5 | 3 |
| X3 | 4 | 1 | 2 |
| X4 | 2 | 2 | 2 |
| X5 | 1 | 4 | 2 |
| X6 | 3 | 1 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andriushchenko, E.; Kallaste, A.; Mohammadi, M.H.; Lowther, D.A.; Heidari, H. Sensitivity Analysis for Multi-Objective Optimization of Switched Reluctance Motors. Machines 2022, 10, 559. https://0-doi-org.brum.beds.ac.uk/10.3390/machines10070559
Andriushchenko E, Kallaste A, Mohammadi MH, Lowther DA, Heidari H. Sensitivity Analysis for Multi-Objective Optimization of Switched Reluctance Motors. Machines. 2022; 10(7):559. https://0-doi-org.brum.beds.ac.uk/10.3390/machines10070559
Chicago/Turabian StyleAndriushchenko, Ekaterina, Ants Kallaste, Mohammad Hossain Mohammadi, David A. Lowther, and Hamidreza Heidari. 2022. "Sensitivity Analysis for Multi-Objective Optimization of Switched Reluctance Motors" Machines 10, no. 7: 559. https://0-doi-org.brum.beds.ac.uk/10.3390/machines10070559