

Novel Design of Variable Stiffness Pneumatic Flexible Shaft Coupling: Determining the Mathematical-Physical Model and Potential Benefits



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Brief Characteristics of the Examined Types of Pneumatic Flexible Shaft Couplings
2.2. Determining the Mathematical Model of Tangential Pneumatic Flexible Shaft Coupling with Axially Deformed Flexible Elements
2.2.1. Determining the Mathematical Model of Pneumatic Element Force
|
|
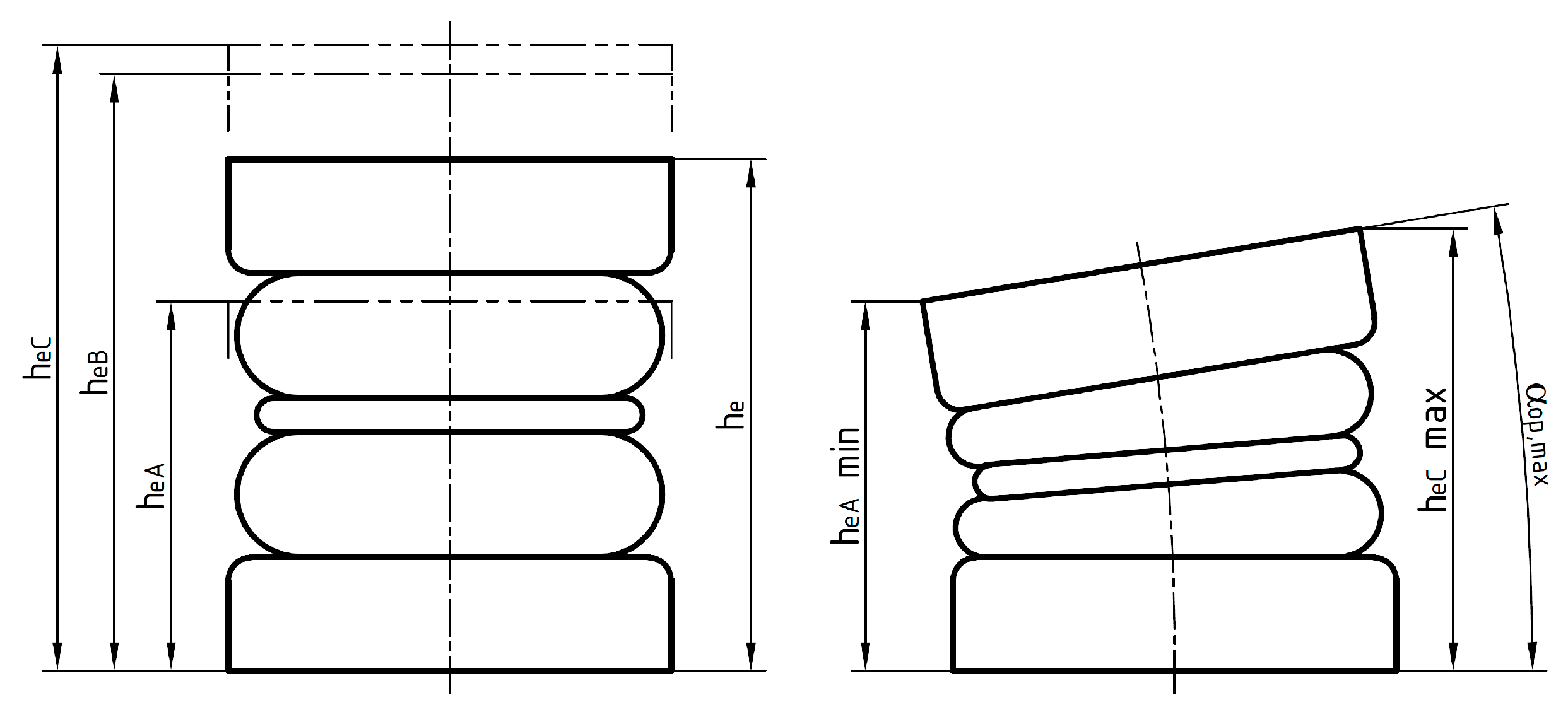
2.2.2. Geometry of Coupling—Kinematics and Determination of the Optimum Parameters
|
|
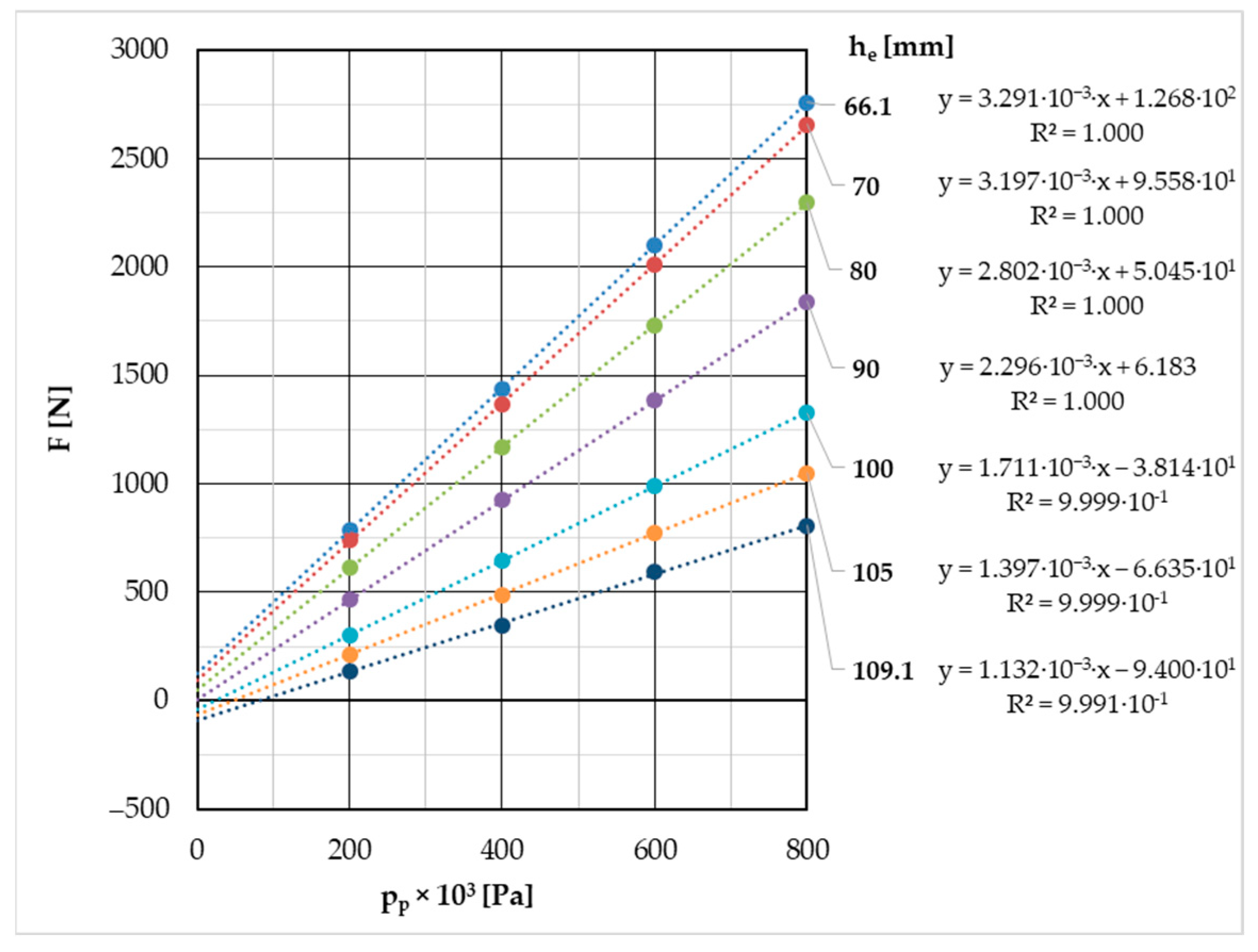
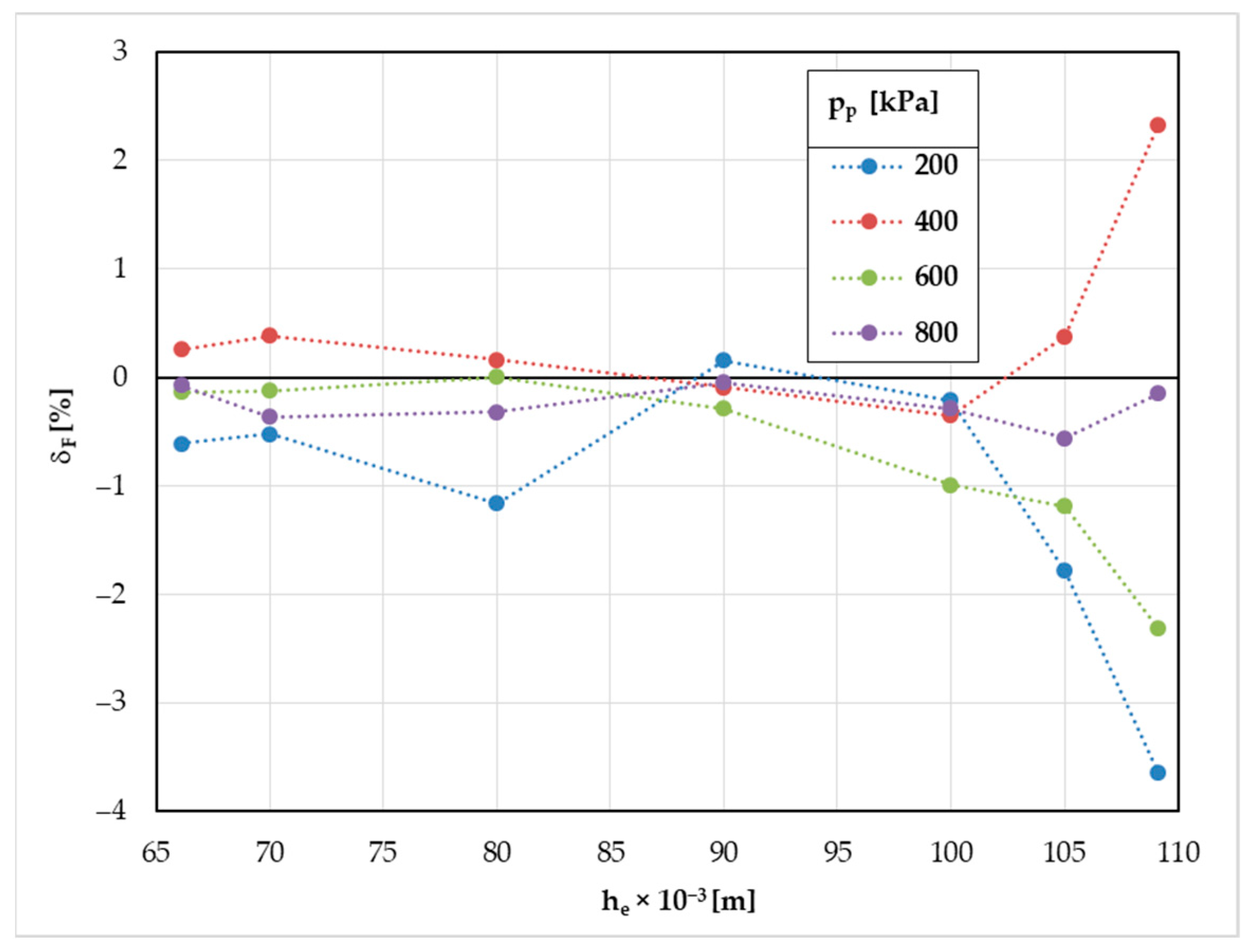
2.2.3. Computation of Static Load Characteristics
- (a)
- The compression volumes of all compressed and stretched pneumatic elements are connected, forming a common compression volume where the pressure in all compressed and stretched elements, considering the static (slow) torsional deformation of the coupling, is the same.
- (b)
- The compression volumes of compressed and stretched elements are separated, so the pressure in compressed and stretched elements is different. Generally, we assume that in the neutral position of coupling, the segments are equally spaced and the initial pressure on all elements is the same. It is possible to pressurize both groups of elements differently, but in this case the actual neutral position of coupling (by zero transmitted torque) would be different (segments not equally spaced), and the load characteristics in one direction of twist angle will not be the same as in the opposite direction.
- [N] is the gum force of compressed and stretched elements according to Formula (8).
- pp [Pa] is the overpressure in the common compression volume of the coupling.
- [m2] is the effective area of compressed and stretched elements according to Formula (9).
3. Results and Discussion
3.1. Geometric Design and Comparison of Maximum Twist Angle and Torsional Stiffness
3.2. Comparison of Static Load Characteristics, Maximum Load Torque, and Torsional Stiffness
- keG = 7.2 Nm·°−1 for classic coupling.
- keG = 3.1 Nm·°−1 for new coupling.
3.3. Comparison of the Gum Torque Effect
4. Conclusions
5. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zoul, V. Dynamic of propulsion, present situation and trends. Trans. Univ. Košice 2014, 2, 101–106. [Google Scholar]
- Liang, X.; Shu, G.; Dong, L.; Wang, B.; Yang, K. Progress and Recent Trends in Torsional Vibration of Internal Combustion Engines. In Advances in Vibration Analysis Research; Ebrahimi, F., Ed.; InTech: Rijeka, Croatia, 2011; pp. 245–272. [Google Scholar] [CrossRef]
- Wojnar, G.; Czech, P.; Folęga, P. Problem with Diagnosing Local Faults of Gearboxes on the Basis of Vibration Signal. Trans. Univ. Košice 2014, 95–100. [Google Scholar]
- Białek, P.; Bielawski, P.J. Failure analysis of refinery hydrogen reciprocating compressors. Diagnostyka 2018, 19, 83–92. [Google Scholar] [CrossRef]
- Maláková, S.; Frankovský, P.; Harachová, D.; Neumann, V. Design of Constructional Optimisation Determined for Mixer Truck Gearbox. Ad Alta J. Interdiscip. Res. 2019, 9, 414–417. [Google Scholar]
- Marasova, D.; Andrejiova, M.; Grincova, A. Experimental Study of the Influence of the Interaction of a Conveyor Belt Support System on Belt Damage Using Video Analysis. Appl. Sci. 2023, 13, 7935. [Google Scholar] [CrossRef]
- Bortnowski, P.; Doroszuk, B.; Krol, R.; Marasova, D.; Moravic, M.; Ozdoba, M. Forecasting Blockades of Conveyor Transfer Points Based on Vibrodiagnostics. Meas. J. Int. Meas. Confed. 2023, 216, 112884. [Google Scholar] [CrossRef]
- Šulka, P.; Sapietová, A.; Bárnik, F. Vibrodiagnostics of rolling ball bearings connected with processing, result´s comparison and prediction of service life. Sci. J. Sil. Univ. Tech. 2020, 106, 183–196. [Google Scholar] [CrossRef]
- Wojnar, G.; Burdzik, R.; Wieczorek, A.N.; Konieczny, Ł. Multidimensional Data Interpretation of Vibration Signals Registered in Different Locations for System Condition Monitoring of a Three-Stage Gear Transmission Operating under Difficult Conditions. Sensors 2021, 21, 7808. [Google Scholar] [CrossRef]
- Moravec, M.; Badida, M.; Mikušová, N.; Sobotová, L.; Švajlenka, J.; Dzuro, T. Proposed options for noise reduction from a wastewater treatment plant: Case study. Sustainability 2021, 13, 2409. [Google Scholar] [CrossRef]
- Wandor, M.; Burdzik, R. Research on vibration of steering gear of automotive vehicle. Vibroeng. Procedia 2015, 6, 264–267. [Google Scholar]
- Galdo, M.I.L. Marine Engines Performance and Emissions. J. Mar. Sci. Eng. 2021, 9, 280. [Google Scholar] [CrossRef]
- Puškár, M.; Jahnátek, A.; Kádárová, J.; Šoltésová, M.; Kovanič, Ľ.; Krivosudská, J. Environmental study focused on the suitability of vehicle certifications using the new European driving cycle (NEDC) with regard to the affair “dieselgate” and the risks of NOx emissions in urban destinations. Air Qual. Atmos. Health 2019, 12, 251–257. [Google Scholar] [CrossRef]
- Czech, P. Diagnosing faults in the timing system of a passenger car spark ignition engine using the Bayes classifier and entropy of vibration signals. Sci. J. Sil. Univ. Tech. 2022, 116, 83–98. [Google Scholar] [CrossRef]
- Feese, T.; Hill, C. Prevention of Torsional Vibration Problems in Reciprocating Machinery. In Proceedings of the 38th Turbomachinery Symposium, Houston, TX, USA, 14–17 September 2009; Texas A&M University, Turbomachinery Laboratories: College Station, TX, USA, 2018; pp. 213–238. [Google Scholar] [CrossRef]
- Wachel, J.C.; Szenasi, F.R. Analysis of Torsional Vibrations in Rotating Machinery. In Proceedings of the Twenty-Second Turbomachinery Symposium, Dallas, TX, USA, 14–16 September 1993; Texas A&M University: College Station, TX, USA, 1993; pp. 127–151. [Google Scholar]
- Lu, J.; Zheng, H.; Husnain Haider, M.; Feng, Y.; Zhi, P.; Cheng, J.; Wang, Z. Fracture failure analysis of flywheel hub served in heavy-fuel aviation piston engine. Eng. Fail. Anal. 2023, 151, 107363. [Google Scholar] [CrossRef]
- Jackson, C.; Leader, M.E. Design, Testing and Commissioning of a Synchronous Motor-Gear-Axial Compressor. In Proceedings of the 12th Turbomachinery Symposium, College Station, TX, USA, November 1983; Jenkins, P.E., Ed.; Texas A&M University, Turbomachinery Laboratories: College Station, TX, USA, 1983; pp. 97–112. [Google Scholar] [CrossRef]
- Adachi, A.; Oba, S. Overcoming Failure of Synchronous Motor Driven Compressor Train by Application of Controlled Slip Clutch; Turbomachinery Laboratory, Texas A&M Engineering Experiment Station: College Station, TX, USA, 2020. [Google Scholar]
- Kaššay, P.; Homišin, J.; Urbanský, M.; Grega, R. Transient Torsional Analysis of a Belt Conveyor Drive with Pneumatic Flexible Shaft Coupling. Acta Mech. Autom. 2017, 11, 69–72. [Google Scholar] [CrossRef]
- Homišin, J. New Types of Flexible Shaft Couplings: Development, Research, Application; Vienala: Košice, Slovakia, 2002. [Google Scholar]
- Zeng, Q.; Bin, G.; Li, C.; Chen, L. Study on the influence of torsional stiffness of coupling on torsional vibration characteristics of slender series shafting of submersible oil electric pump. Chin. J. Eng. Des. 2021, 28, 89–94. [Google Scholar] [CrossRef]
- Gorbacovs, D.; Gavrilovs, P.; Eiduks, J.; Strautmanis, G. Failure analysis of rubber-cord couplings of ER2 series electric trains. In Proceedings of the 22nd International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 24–26 May 2023. [Google Scholar] [CrossRef]
- Gurský, P. Influence of working cycles identification on characteristics of flexible couplings and their comparison. Ph.D. Thesis, Technical University of Košice, Košice, Slovakia, 9 March 2011. [Google Scholar]
- Homišin, J.; Kaššay, P. Influence of temperature on characteristics properties of flexible coupling. Transp. Probl. 2012, 7, 123–129. [Google Scholar]
- Opasiak, T.; Margielewicz, J.; Gąska, D.; Haniszewski, T. Influence of changes in the working temperature of flexible couplings on their stiffness characteristics. Transp. Probl. 2022, 17, 177–186. [Google Scholar] [CrossRef]
- Wilson, W.K. Practical Solution of Torsional Vibration Problems, 3rd ed.; Chapman & Hall Ltd.: London, UK, 1969; Volumes 1–5. [Google Scholar]
- Bartel, T.; Herold, S.; Infante, F.; Käsgen, J.; Matthias, M.; Millitzer, J.; Perfetto, S. Active Vibration Reduction of Ship Propulsion Systems. In Proceedings of the 2018 Joint Conference—Acoustics, Ustka, Poland, 11–14 September 2018; Polish Acoustical Society: Ustka, Poland, 2018; pp. 15–20. [Google Scholar]
- Kim, Y.G.; Hwang, S.J.; Cho, K.H.; Kim, U.K. Characteristics of propulsion shafting system in ships with engine acceleration problems in the barred speed range. Ocean. Eng. 2017, 145, 479–491. [Google Scholar] [CrossRef]
- Smooth Compressor Applications—Eliminating Speed Restrictions with Geislinger Technology. Available online: https://www.geislinger.com/en/blog/smooth-compressor-applications-eliminating-speed-restrictions-with-geislinger-technology/ (accessed on 22 November 2023).
- Song, L.Q.; Zeng, L.P.; Zhang, S.P.; Zhou, J.D.; Niu, H.E. Design and analysis of a dual mass flywheel with continuously variable stiffness based on compensation principle. Mech. Mach. Theory 2014, 79, 124–140. [Google Scholar] [CrossRef]
- Kowal, A.; Filipowicz, K. The construction of metal flexible torsional coupling. Transp. Probl. 2007, 2, 69–76. [Google Scholar]
- Nemchinov, S.; Khristenko, A. Stress-strain state of pneumatic flexible shaft coupling for ball mill drives. Sci. J. Silesian Univ. Technol. Ser. Transp. 2018, 99, 125–134. [Google Scholar] [CrossRef]
- Behrooz, M.; Wang, X.; Gordaninejad, F. Modeling of a new semi-active/passive magnetorheological elastomer isolator. Smart Mater. Struct. 2014, 23, 045013. [Google Scholar] [CrossRef]
- Syam, T.M.I.; Hegazi, A.A.A.; Muthalif, A.G.A.; Badri, Y. Magnetorheological elastomer-based variable stiffness flexible coupling for vibration isolation. Trans. Can. Soc. Mech. Eng. 2021, 46, 1–10. [Google Scholar] [CrossRef]
- Lee, K.H.; Park, J.E.; Kim, Y.K. Design of a stiffness variable flexible coupling using magnetorheological elastomer for torsional vibration reduction. J. Intell. Mater. Syst. Struct. 2019, 30, 2212–2221. [Google Scholar] [CrossRef]
- Gasparoto, H.F.; Chocron, O.; Benbouzid, M.; Meirelles, P.S. Advances in reconfigurable vectorial thrusters for adaptive underwater robots. J. Mar. Sci. Eng. 2021, 9, 170. [Google Scholar] [CrossRef]
- Lubin, T.; Colle, A. Simulation analysis and experimental evaluation of the transient behaviour of a reluctance magnetic coupling. IET Electr. Power Appl. 2020, 14, 391–397. [Google Scholar] [CrossRef]
- Sudano, A.; Accoto, D.; Zollo, L.; Guglielmelli, E. Design, development and scaling analysis of a variable stiffness magnetic torsion spring. Int. J. Adv. Robot. Syst. 2013, 10, 372. [Google Scholar] [CrossRef]
- Gasparoto, H.F.; Chocron, O.; Benbouzid, M.; Meirelles, P.S. Design of an Optimally Stiff Axial Magnetic Coupling for Compliant Actuators. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Lisbon, Portugal, 14–17 October 2019; IEEE Computer Society: Washington, DC, USA, 2019; Volume 1, pp. 5198–5203. [Google Scholar]
- Kinnunen, K.; Laine, S.; Tiainen, T.; Viitala, R. Method for Adjusting Torsional Natural Frequencies of Powertrains with Novel Coupling Design. Machines 2022, 10, 162. [Google Scholar] [CrossRef]
- Kinnunen, K.; Laine, S.; Tiainen, T.; Viitala, R.; Seppänen, A.; Turrin, T.; Kiviluoma, P.; Viitala, R. Coupling with adjustable torsional stiffness. Proc. Est. Acad. Sci. 2021, 70, 470–476. [Google Scholar] [CrossRef]
- Kołodziej, P.; Boryga, M. Frequency analysis of coupling with adjustable torsional flexibility. Eksploat. I Niezawodn. 2014, 16, 325–329. [Google Scholar]
- Vanderborght, B.; Albu-Schaeffer, A.; Bicchi, A.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.; Eiberger, O.; Friedl, W.; Ganesh, G.; et al. Variable impedance actuators: A review. Robot. Auton. Syst. 2013, 61, 1601–1614. [Google Scholar] [CrossRef]
- Choi, J.; Park, S.; Lee, W.; Kang, S.C. Design of a robot joint with variable stiffness. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1760–1765. [Google Scholar]
- Jin, H.; Luo, M.; Lu, S.; He, Q.; Lin, Y. Design and Analysis of a Novel Variable Stiffness Joint for Robot. Actuators 2023, 12, 10. [Google Scholar] [CrossRef]
- Zhu, H.; Thomas, U. A new design of a variable stiffness joint. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 223–228. [Google Scholar]
- Li, Z.; Bai, S. A novel revolute joint of variable stiffness with reconfigurability. Mech. Mach. Theory 2019, 133, 720–736. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, Q.; Chen, B.; Xu, D.; Shao, Z. Design and Evaluation of a Novel Torque-Controllable Variable Stiffness Actuator with Reconfigurability. IEEE/ASME Trans. Mechatron. 2022, 27, 292–303. [Google Scholar] [CrossRef]
- Li, Z.; Chen, W.; Zhang, J.; Li, Q.; Wang, J.; Fang, Z.; Yang, G. A novel cable-driven antagonistic joint designed with variable stiffness mechanisms. Mech. Mach. Theory 2022, 171, 104716. [Google Scholar] [CrossRef]
- Choi, J.; Hong, S.; Lee, W.; Kang, S.; Kim, M. A robot joint with variable stiffness using leaf springs. IEEE Trans. Robot. 2011, 27, 229–238. [Google Scholar] [CrossRef]
- Fang, L.; Wang, Y. Stiffness analysis of a variable stiffness joint using a leaf spring. In Intelligent Robotics and Applications, Proceedings of the 10th International Conference, ICIRA 2017, Wuhan, China, 16–18 August 2017; Springer International Publishing: New York, NY, USA, 2017; Volume 10463, pp. 225–237. [Google Scholar]
- Kohl, O.; Pesik, L. Evaluation of a driver’s seat’s dynamic properties. Sci. J. Sci. J. Silesian Univ. Technol. Ser. Transp. 2016, 91, 59–69. [Google Scholar] [CrossRef]
- Duda, M.; Łazarz, B.; Czech, P.; Mańka, A.; Matyja, T.; Dzia, W.; Foteli, Ł.; Hodzie, W.S. Vibration-isolating action of seats in a passenger car. TTS Tech. Transp. Szyn. 2015, 22, 453–458. [Google Scholar]
- Jírová, R.; Pešík, L. Pneumatic vibroisolation system of the base desk with natural frequency regulation. Sci. J. Sil. Univ. Tech. 2021, 113, 91–100. [Google Scholar] [CrossRef]
- Karimi Eskandary, P.; Khajepour, A.; Wong, A.; Ansari, M. Analysis and optimization of air suspension system with independent height and stiffness tuning. Int. J. Automot. Technol. 2016, 17, 807–816. [Google Scholar] [CrossRef]
- Grega, R.; Krajňák, J.; Moravič, M. Experimental Verification of the Impact of a Technical Gas-Using Pneumatic Coupling on Torsional Oscillation. Sci. J. Silesian Univ. Technol. Ser. Transp. 2018, 99, 53–63. [Google Scholar] [CrossRef]
- Homišin, J. Pneumatic Coupling with Increased Compression Space. Industrial Property Office of Slovak Republic, Banská Bystrica 1996. Patent SK 278152 B6, 7 February 1996. Available online: https://wbr.indprop.gov.sk/WebRegistre/Patent/Detail/3764-91?csrt=10776270707729254306 (accessed on 22 November 2023). (In Slovak)
- Homišin, J. Shaft Coupling with Pneumatic-Flexible Elements. Industrial Property Office of Slovak Republic, Banská Bystrica 1997. Patent SK 278653 B6, 10 December 1997. Available online: https://wbr.indprop.gov.sk/WebRegistre/Patent/Detail/1700-92?csrt=10776270707729254306# (accessed on 22 November 2023). (In Slovak)
- Homišin, J. Pneumatic Shaft Coupling with Axial-Flexible Element. Industrial Property Office of Slovak Republic, Banská Bystrica 2016. Patent SK 288344 B6, 25 February 2016. Available online: https://wbr.indprop.gov.sk/WebRegistre/Patent/Detail/159-2010?csrt=10776270707729254306# (accessed on 22 November 2023). (In Slovak)
- Homišin, J.; Kaššay, P. Optimal tuning method of ships system by means of pneumatic tuner of torsional oscillations. Acta Mech. Slov. 2009, 13, 38–47. [Google Scholar] [CrossRef]
- Homišin, J. Static optimisation of mechanical systems based on the method of extremal regulation. Sci. J. Sil. Univ. Technol. Ser. Transp. 2019, 103, 15–29. [Google Scholar] [CrossRef]
- Homišin, J.; Urbanský, M. Partial results of extremal control of mobile mechanical system. Diagnostyka 2015, 16, 35–39. [Google Scholar]
- Kaššay, P.; Grega, R. Tangential Pneumatic Flexible Shaft Coupling with Axially Deformed Flexible Elements. Industrial Property Office of Slovak Republic, Banská Bystrica 2021. Patent SK 288875 B6, 14 July 2021. Available online: https://wbr.indprop.gov.sk/WebRegistre/Patent/Detail/78-2017? (accessed on 27 October 2023). (In Slovak)
- Urbanský, M.; Kaššay, P.; Vojtková, J. New design solutions of tangential pneumatic torsional vibration tuners. Scientific Journal of Silesian University of Technology. Series Transport. Sci. J. Sil. Univ. Tech. 2019, 103, 183–191. [Google Scholar] [CrossRef]
- Homišin, J.; Kaššay, P.; Urbanský, M.; Puškár, M.; Grega, R.; Krajňák, J. Electronic constant twist angle control system suitable for torsional vibration tuning of propulsion systems. J. Mar. Sci. Eng. 2020, 8, 721. [Google Scholar] [CrossRef]
- Urbanský, M. Investigation of the Mechanical System Reaction to the Gaseous Medium Pressure Change in the Pneumatic Coupling. Ph.D. Thesis, Technical University of Košice, Košice, Slovakia, 2012. (In Slovak). [Google Scholar]
- Čopan, P. Application of new Tuning Method of Torsional Oscillating Mechanical Systems. Ph.D. Thesis, Technical University of Košice, Košice, Slovakia, 2014. (In Slovak). [Google Scholar]
- IMI NORGREN—PM/31000—Serviceable Air Bellows, Single Acting. Available online: https://cdn.norgren.com/pdf/en_1_8_001_PM_31000.pdf (accessed on 24 July 2023).
- Kaššay, P.; Homišin, J.; Urbanský, M. Formulation of Mathematical and Physical Model of Pneumatic Flexible Shaft Couplings. Sci. J. Sil. Univ. Technol. Ser. Transp. 2012, 76, 25–30. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaššay, P.; Grega, R.; Urbanský, M.; Krajňák, J.; Kačír, M.; Žuľová, L. Novel Design of Variable Stiffness Pneumatic Flexible Shaft Coupling: Determining the Mathematical-Physical Model and Potential Benefits. Machines 2024, 12, 28. https://0-doi-org.brum.beds.ac.uk/10.3390/machines12010028
Kaššay P, Grega R, Urbanský M, Krajňák J, Kačír M, Žuľová L. Novel Design of Variable Stiffness Pneumatic Flexible Shaft Coupling: Determining the Mathematical-Physical Model and Potential Benefits. Machines. 2024; 12(1):28. https://0-doi-org.brum.beds.ac.uk/10.3390/machines12010028
Chicago/Turabian StyleKaššay, Peter, Robert Grega, Matej Urbanský, Jozef Krajňák, Matúš Kačír, and Lucia Žuľová. 2024. "Novel Design of Variable Stiffness Pneumatic Flexible Shaft Coupling: Determining the Mathematical-Physical Model and Potential Benefits" Machines 12, no. 1: 28. https://0-doi-org.brum.beds.ac.uk/10.3390/machines12010028