
Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles


1
School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore 639798, Singapore
2
School of Automotive Studies, Tongji University, Shanghai 201804, China
*
Author to whom correspondence should be addressed.
Actuators 2021, 10(8), 184; https://0-doi-org.brum.beds.ac.uk/10.3390/act10080184
Submission received: 5 July 2021
/
Revised: 26 July 2021
/
Accepted: 1 August 2021
/
Published: 5 August 2021
(This article belongs to the Special Issue Actuators for Intelligent Electric Vehicles)
Abstract
:In this paper, the related studies of chassis configurations and control systems for four-wheel independent drive/steering electric vehicles (4WID-4WIS EV) are reviewed and discussed. Firstly, some prototypes and integrated X-by-wire modules of 4WID-4WIS EV are introduced, and the chassis configuration of 4WID-4WIS EV is analyzed. Then, common control models of 4WID-4WIS EV, i.e., the dynamic model, kinematic model, and path tracking model, are summarized. Furthermore, the control frameworks, strategies, and algorithms of 4WID-4WIS EV are introduced and discussed, including the handling of stability control, rollover prevention control, path tracking control and active fault-tolerate control. Finally, with a view towards autonomous driving, some challenges, and perspectives for 4WID-4WIS EV are discussed.
1. Introduction
Autonomous driving techniques can not only reduce human drivers’ driving burden, but also advance driving safety and reduce traffic accidents. In addition to realizing zero emissions targets and reducing air pollution, electric vehicles (EVs) have better control performance than traditional fuel vehicles. Therefore, autonomous vehicles (AVs) and EVs have been a popular issue in vehicle development [1,2,3].
In recent years, most AVs have been studied and developed based on the traditional fuel vehicle platform, e.g., those used by Baidu, Waymo, Uber, etc. These so-called AVs are designed by applying advanced perception sensors, decision-making and control systems to the existing commercial vehicles [4]. Most autonomous driving companies are not automobile manufacturers and cannot integrate autonomous driving technology into the autonomous driving platform design, which restricts the commercial development of AVs [5]. In fact, traditional fuel vehicles are not the best autonomous driving platform. Their complex drive and transmission systems, i.e., the internal combustion engine, torque converter, etc., have slow response rates and the low control accuracy [6]. In contrast, EVs are preferred by many researchers. Without the complex drive and transmission systems, accurate control is easier to achieve [7]. As a result, the decision-making commands from the autonomous driving system can be better executed [8]. Therefore, towards future autonomous driving, autonomous mobile platforms have been widely studied, including those of Schaeffler, Protean, etc. [9,10,11]. In the autonomous mobile platforms, the X-by-wire chassis technique is a critical issue for accurate control [12,13].
Traditional vehicles usually adopt the centralized drive system and the front-wheel steering (FWS) system, which is a common chassis configuration. With the development of chassis modularization and electrification, the integrated X-by-wire module has been widely studied, in which the steering system, drive system and braking system are all controlled by wire [14]. They are integrated with the vehicle suspension and make up an integrated chassis module, which is beneficial to the chassis reconstruction for different demands [15]. Due to the X-by-wire module, vehicles can easily realize accurate dynamic control to advance active safety [16]. Four X-by-wire modules make up a four-wheel independent drive/steering electric vehicle (4WID-4WIS EV). Due to the application of X-by-wire modules, the steering angle and drive/braking torque of each wheel can be controlled independently [17]. As a result, 4WID-4WIS EV can easily realize multi-objective optimization control, e.g., handling stability control, rollover prevention control and path tracking control [18]. Therefore, 4WID-4WIS EV is regarded as an ideal EV development platform by many researchers.
4WID-4WIS EV has been widely studied in recent years. Some prototypes have been designed and developed by vehicle companies and universities. Moreover, various control frameworks, algorithms and strategies have been studied as well. However, some critical issues of 4WID-4WIS EV have not been completely resolved, which prevents its commercial application. Towards autonomous driving, this paper aims to review the chassis configuration and control technique of 4WID-4WIS EV. Focusing on certain technical difficulties of 4WID-4WIS EV, some perspectives are given at the end of this paper.
The rest of this paper is organized as follows. In Section 2, the chassis configuration of 4WID-4WIS EV is introduced and analyzed. Section 3 presents the typical control models of 4WID-4WIS EV. In Section 4, control frameworks and control algorithms of 4WID-4WIS EV are reviewed. Section 5 gives the challenges and perspectives of 4WID-4WIS EVs’ future development. Finally, Section 6 concludes this paper.
2. Chassis Configuration of 4WID-4WIS EV
This section mainly focuses on the chassis configuration analysis of the 4WID-4WIS EV. Firstly, the typical prototypes of 4WID-4WIS EV are introduced and the configuration analysis is conducted. Then, the key component of 4WID-4WIS EV, i.e., the X-by-wire module, is reviewed, and the comparative study of different modules is carried out. Finally, the steering modes of 4WID-4WIS EV are analyzed and the switching logic between different steering modes is introduced.
2.1. Configuration Analysis of 4WID-4WIS EV
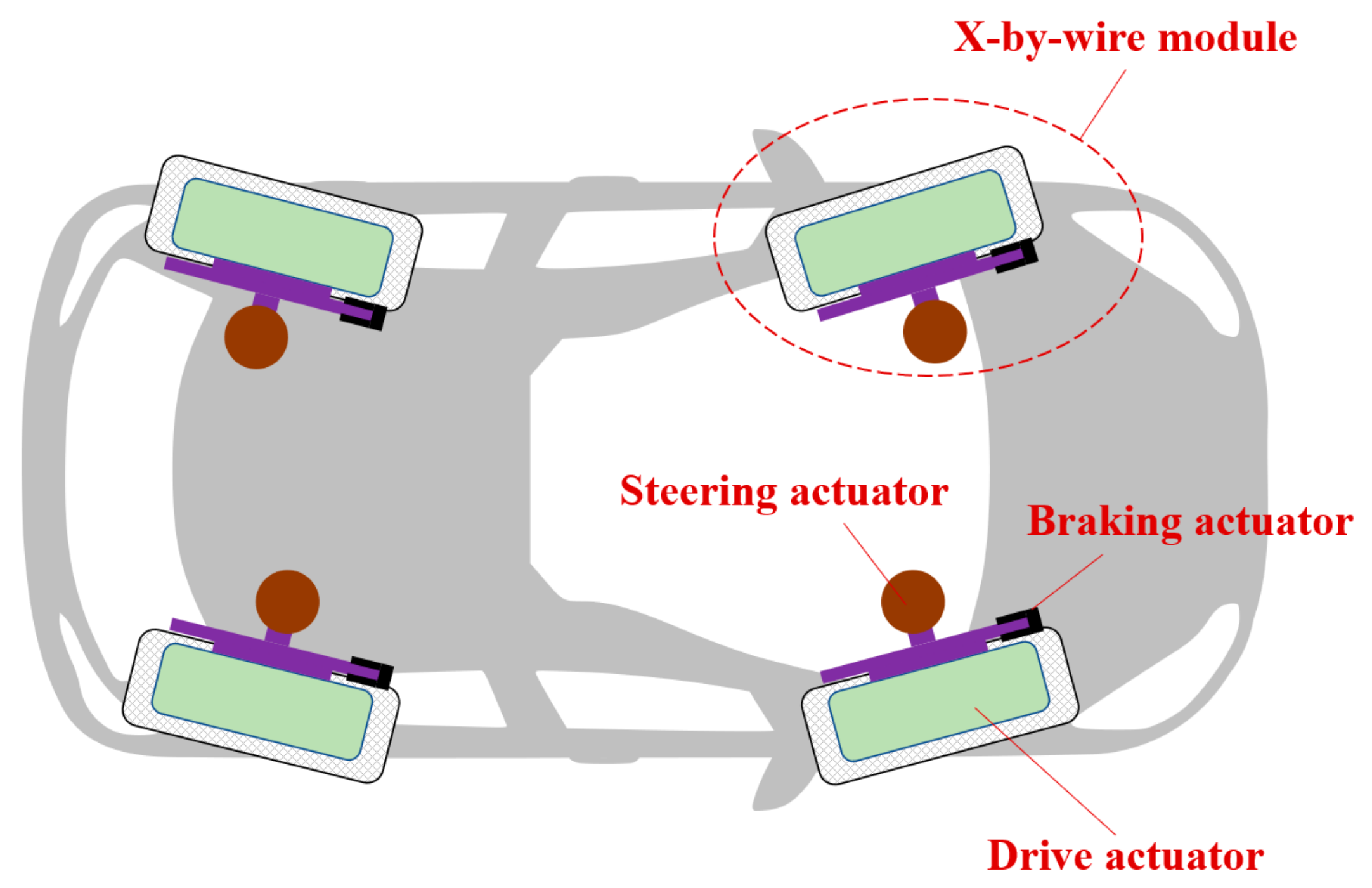
As shown in Figure 1, the chassis of 4WID-4WIS EV is made up of four X-by-wire modules that integrate the steering, drive, braking and suspension systems. Three actuators are included in the X-by-wire module, i.e., the steering-by-wire actuator, drive-by-wire actuator, and braking-by-wire actuator. The steering-by-wire actuator is usually integrated with the steering kingpin, which can be a virtual kingpin or a component of the suspension system. The in-wheel motor is usually taken as a drive-by-wire actuator, which can be integrated with the wheel rim. Compared with the conventional centralized drive system, the drive shaft, the differential mechanism, and reducers are cancelled. An electronic hydraulic braking (EHB) system and an electronic mechanical braking (EMB) system are usually adopted as the braking-by-wire actuator [19,20,21].
Due to the application of X-by-wire modules, the steering angle and drive/braking torque of each wheel can be controlled independently. As a result, 4WID-4WIS EV has more degrees of freedom (DOF) in terms of control than conventional vehicles, which leads to more steering and motion modes.
2.2. Prototypes of 4WID-4WIS EV
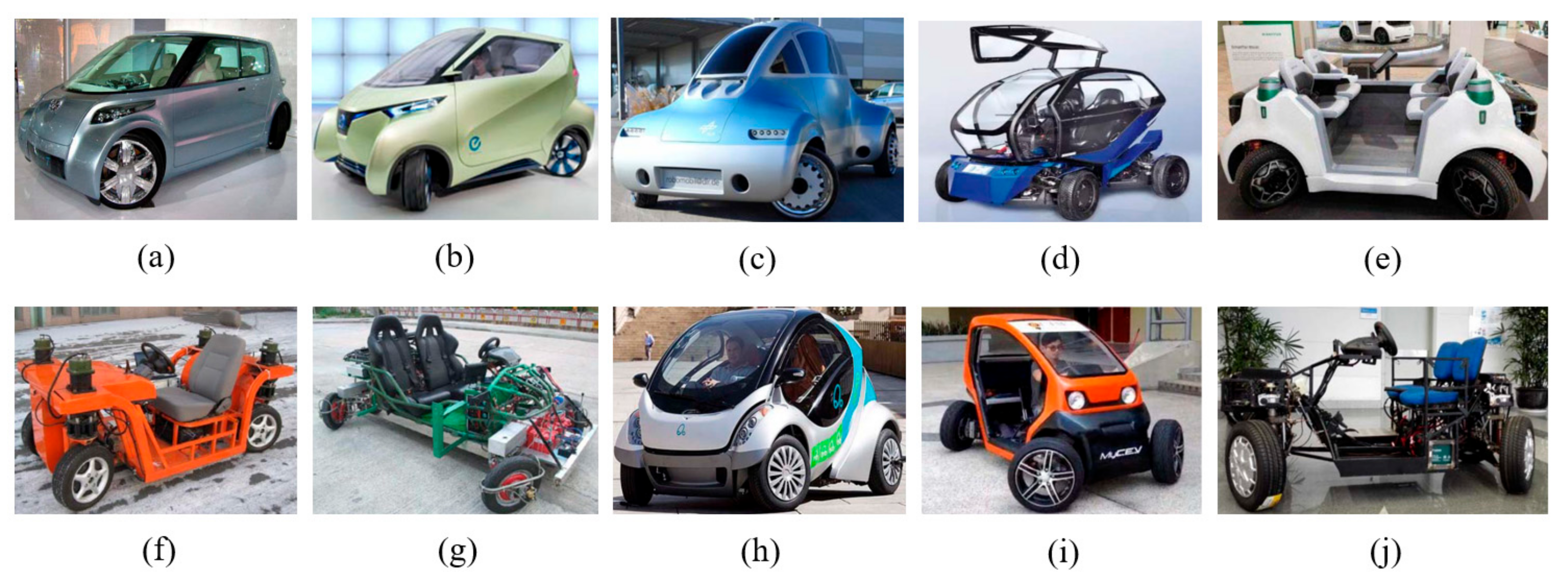
In recent years, 4WID-4WIS EV has been widely studied by many companies and universities. Some prototypes of 4WID-4WIS EV are shown in Figure 2. As a futuristic looking vehicle, Fine-T is proposed by Toyota, which is equipped with a 4WID-4WIS technique that can realize pivot steering in favor of parking in a tighter area [22]. Additionally, Nissan also designed three generations of 4WID-4WIS concept cars, i.e., PIVO1, PIVO2 and PIVO3 [23]. ROboMObil is an autonomous 4WID-4WIS EV. With the application of the 4WID-4WIS technique, it not only shows strong maneuverability at low-speed conditions, e.g., parking, but also has good handling stability at high-speed conditions [24,25]. DFKI EO Smart 2 is a highly flexible micro-car designed for mega-cities, which is also an autonomous concept car. Besides the 4WID-4WIS technique, it can change the morphology of its height and length to further improve the maneuverability. In addition to single-vehicle autonomous driving, platooning autonomous driving can be realized with EO Smart 2 [26]. With the intelligent corner module, Schaeffler proposed the 4WID-4WIS EV Mover that is the solution to the autonomous and sustainable mobility in urban spaces [27]. With the reconstruction of the chassis configuration, Schaeffler Mover can be applied to different types of vehicles. In addition to the vehicle companies, some universities also developed some 4WID-4WIS EV prototypes, including Jilin University [28,29], The Chinese University of Hong Kong (CUHK) [30,31,32], Massachusetts Institute of Technology (MIT) [33], Universiti Teknologi Malaysia (UTM) [34], Tongji University [35,36,37], Pusan National University [38], and Iowa State University [39].
Table 1 shows the performance analysis of the 4WID-4WIS EV prototypes. Most of them have a 180° steering angle range, which is in favor of high maneuverability. Compared with the prototypes designed by universities, the prototypes developed by vehicle companies have higher speed, which is closer to the performance requirements of passenger cars. Some 4WID-4WIS EV prototypes can realize simple autonomous driving functions, e.g., automatic parking. ROboMObil and DFKI EO Smart 2 can realize high-level autonomous driving.
2.3. Integrated X-by-Wire Module of 4WID-4WIS EV
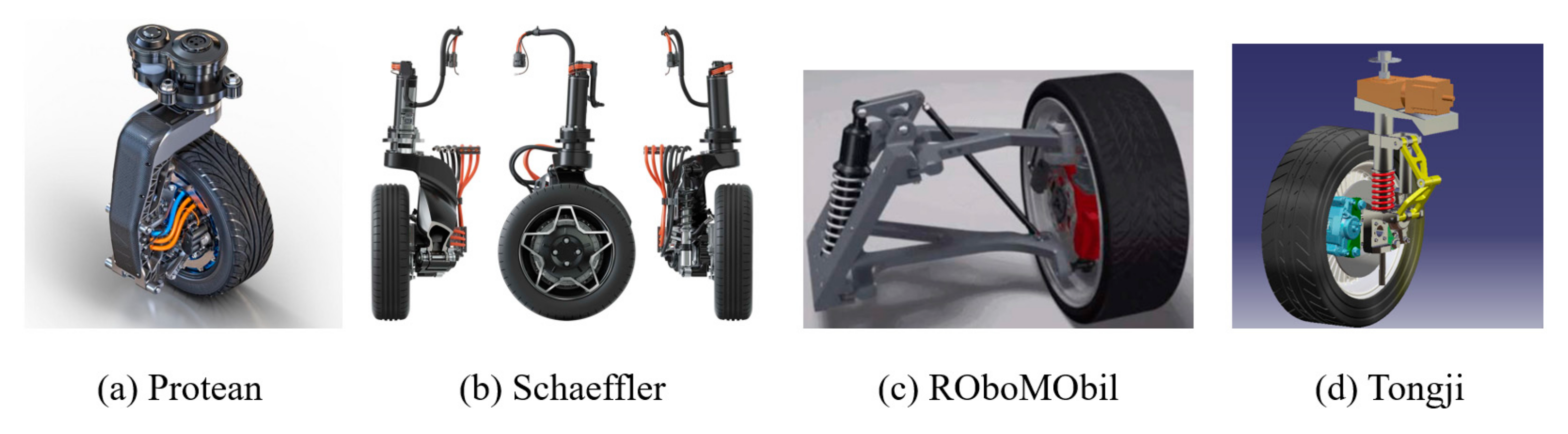
The key component of the 4WID-4WIS EV is the integrated X-by-wire module that integrates the steering, drive, braking and suspension systems. Four X-by-wire modules make up the chassis of 4WID-4WIS EVs. Figure 3 shows four typical X-by-wire modules, in which the first three are mature product prototypes. The X-by-wire modules (b) and (c) have been applied to the 4WID-4WIS EV Schaeffler Mover and ROboMObil. The last module is designed and developed by the authors.
Table 2 shows the structure analysis of four integrated X-by-wire modules. The steering actuators of the four X-by-wire modules have a similar structure, i.e., servo motor and reducer. However, the layout positions of the four steering actuators are different, i.e., above the wheel (Protean. Surrey, United Kingdom, and Schaeffler, Herzogenaurach, Germany ), inside the wheel (ROboMObil, Wessling, Germany) and beside the wheel (Tongji, Shanghai, China). Due to different layout positions of the steering actuator, it yields various steering ranges and control issues. If the steering actuator is placed above the wheel, it can realize zero steering kingpin offset, which is able to reduce the steering resistance. However, it will increase the vertical size of the X-by-wire module. If the steering actuator is placed beside the wheel, the vertical size of the X-by-wire module can be reduced, but it brings large steering kingpin offset, which brings a challenge to the capability of the steering motor. If the steering actuator is placed inside the wheel, it can reduce both the vertical size of the X-by-wire module and the steering kingpin offset, but it brings challenges to the layout of the in-wheel space.
The drive actuators of the four X-by-wire modules all take the in-wheel motor. The Protean X-by-wire module adopts the PD18 in-wheel motor, which has the largest power and torque among the four modules. The braking actuators of the four X-by-wire modules all take the hybrid braking system that integrates hydraulic braking (HB) and motor regenerative braking. The suspension systems of the four X-by-wire modules are different, and can be divided into three types, i.e., the candle type, trailing arm type and the double wishbone type. Compared with the candle suspension and the trailing arm suspension, the double wishbone suspension has better lateral and roll stiffness, which is in favor of safe driving in the condition of the large lateral acceleration. Therefore, it can be found from Table 1 that the design speed of ROboMObil is the largest among all prototypes, i.e., 100 km/h.
2.4. Steering Modes and Switching Logic
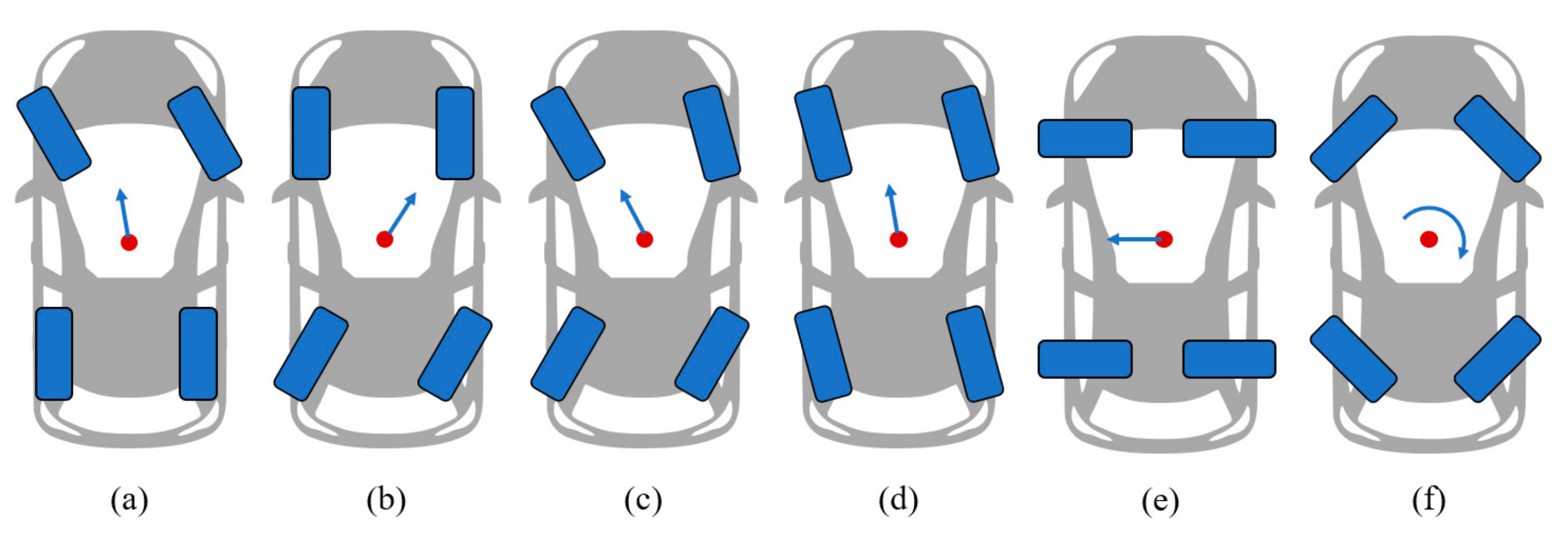
As mentioned above, due to the application of X-by-wire modules, the steering angle of each wheel can be controlled independently. As a result, 4WID-4WIS EV has more steering modes than traditional vehicles. The steering modes of 4WID-4WIS EV are illustrated in Figure 4, including FWS, rear-wheel steering (RWS), 4-wheel steering (4WS), oblique moving, crab moving, and pivot steering. With these steering modes, the maneuverability can be advanced remarkably, e.g., crab moving for side parking, and pivot steering for turning around in narrow spaces [40]. In addition to the maneuverability advancement at low-speed conditions, active 4WS can improve vehicles’ handling stability at high-speed conditions [41,42].
To deal with different missions, effective switching between steering modes becomes very necessary. Based on the principle that the turning center is continuous, a logic of steering mode switching is proposed, which can realize smooth switching at low-speed conditions without stopping the car [43]. The dynamic switching logic between FWS and RWS, and FWS and 4WS, is studied, which is verified with real vehicle tests [44]. To minimize the sudden change of vehicle dynamic parameters and the energy consumption in the switching process, a B-spline curve is proposed to design the switching trajectory, which is optimized with the multi-objective genetic algorithm [45]. Based on the kinematic model and dynamic model of 4WID-4WIS EV, a steering mode switching strategy is designed and verified [46]. To realize the switching control between FWS and 4WS at high-speed conditions, a robust controller is designed [47], which aims to achieve a smooth transition of sideslip angle and yaw rate.
3. Control Model of 4WID-4WIS EV
This section mainly reviews the common control models of 4WID-4WIS EV, including the vehicle dynamic model, vehicle kinematic model, and path tracking model.
3.1. Vehicle Dynamic Model
Vehicle dynamic model is usually used to describe the dynamics of vehicles, especially at high-speed conditions. It is mainly derived through Newton’s Law. According to the number of control DOF, the vehicle dynamic model has various evolutions [48]. A complex vehicle dynamic model can accurately describe the dynamic characteristics of the vehicle. However, it will introduce difficulty to the design of controllers due to the strong nonlinearity and coupling of the complex vehicle dynamic model [49]. Although the simplified vehicle dynamic model is in favor of controller design, some assumptions are made, which are invalid at some conditions. For instance, the assumption of the linear tire model is invalid at extreme conditions [50].
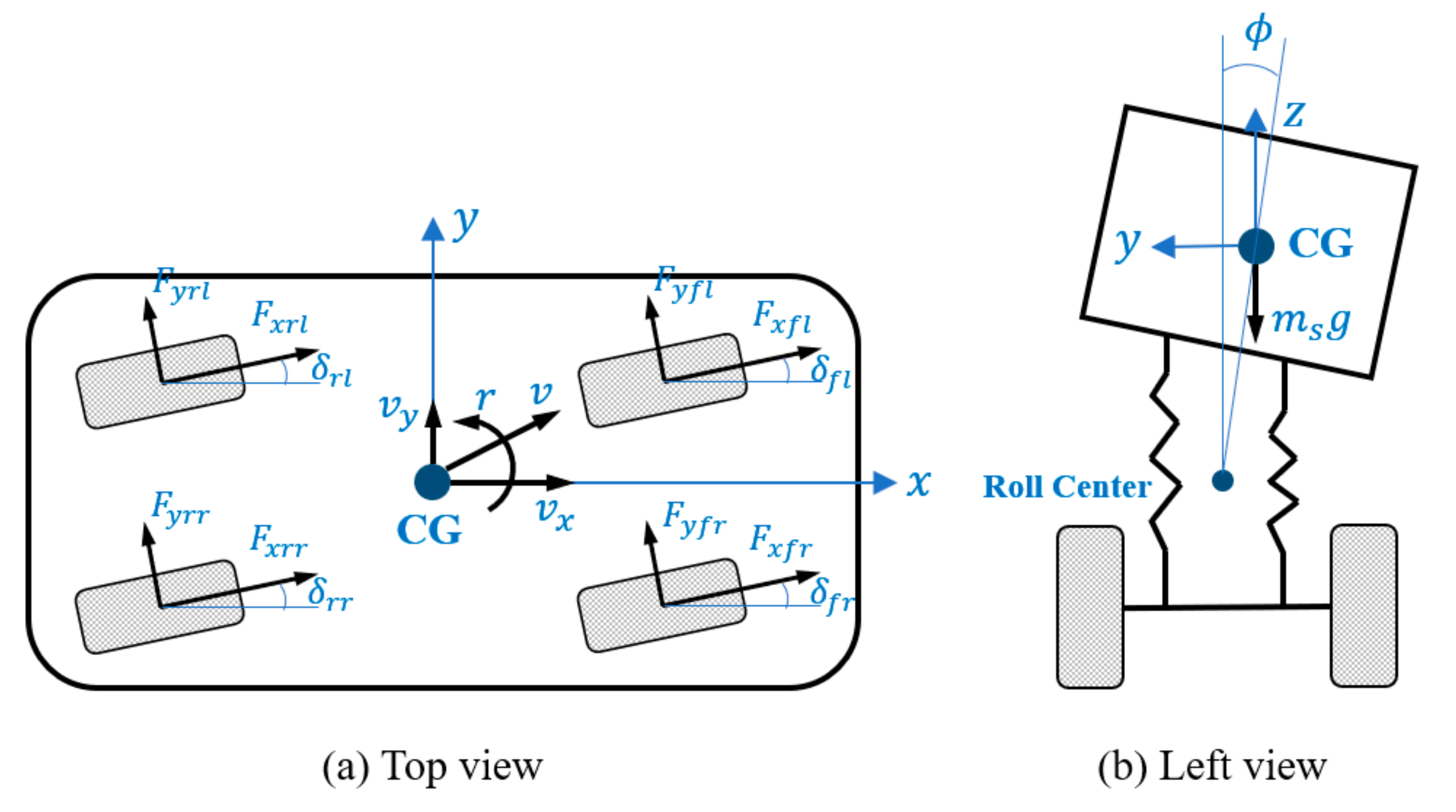
As for the vehicle dynamic control, longitudinal motion, lateral motion, yaw motion and roll motion are commonly considered by researchers. Figure 5 shows the dynamic model of 4WID-4WIS EV. According to Figure 5, the four DOF vehicle dynamic model can be expressed as follows [51,52].
where denotes the longitudinal velocity. and r denote the sideslip angle and yaw rate at the center of gravity (CG), and is the roll angle. In addition, ,, and denote the total longitudinal tire force, lateral tire force, yaw moment and roll moment acting on the vehicle. and denote the wind resistance and the rolling resistance, respectively. and denote the vehicle mass and vehicle sprung mass. is the height of sprung mass. , and are the yaw inertia moment, the product of inertia and the roll inertia moment. (i = fl, fr, rl, rr) denotes the steering angle of each wheel (fl denotes the front left wheel, fr denotes the front right wheel, rl denotes the rear left wheel, and rr denotes the rear right wheel). and (i = fl, fr, rl, rr) denote the longitudinal and lateral forces of each tire. and denote the roll stiffness and damping of the vehicle suspension. is the external yaw moment, which is generated by the torque difference between the left wheel and the right wheel.
where is the vehicle track. According to different control objectives, the above 4DOF vehicle model can be simplified as a 3DOF vehicle model or a 2DOF vehicle model.
It can be found from Equation (2) that the vehicle dynamic model is mainly determined by the tire force and . The tire is a critical component of the vehicle, and its structural characteristics and mechanical properties (vertical force, longitudinal force, lateral force, and torque of return) have a significant impact on the dynamic performance of the vehicle (ride, handling, stability, and safety) [53]. The mechanical properties of tires are mainly affected by factors such as tire type, cornering angle, slip rate, speed, etc. Tire models describe the relationships between the tire force and these influencing factors [54].
Tire models are mainly divided into three types: theoretical models with analytical formulas obtained by simplifying the mechanics of tires; empirical models obtained by analyzing and fitting tire force characteristic test data; semi-empirical models that combines the theoretical model and the analysis of experimental data [55]. Most of the empirical or semi-empirical models have the advantages of simple representation, easy calculation, and high fitting accuracy for specific tires, e.g., the magic formula [56], Dugoff tire model [57], UniTire model [58], Burckhardt tire model [59], HSRI tire model [60], etc. The theoretical model does not require fitting of experimental parameters and has strong versatility, e.g., the Gim tire model [61], string tire model [62], Fiala tire model [63], etc. The selection of tire models depends on the actual vehicle dynamics problem to be solved, whether it needs a more accurate theoretical model for modeling, or an empirical model towards practical engineering applications.
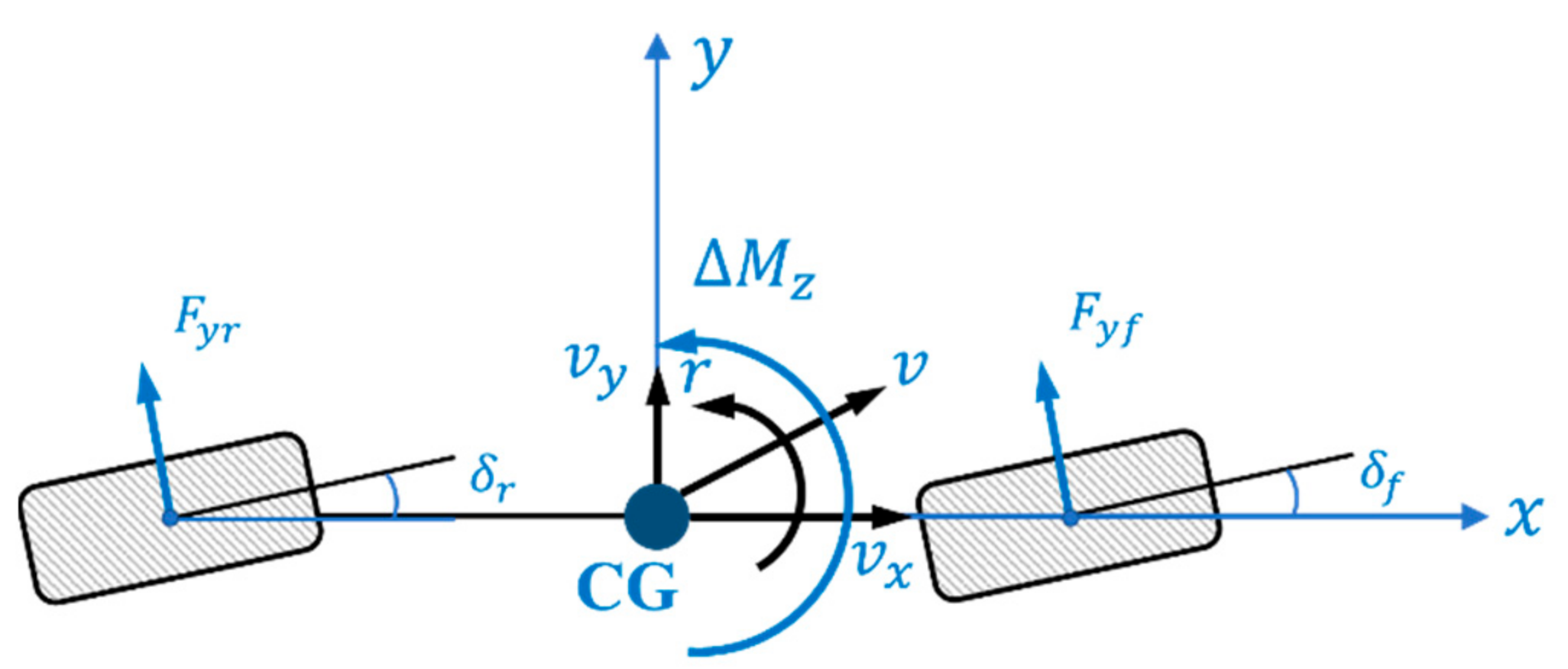
To reduce the complexity of controller design, the four-wheel vehicle model is usually simplified as a single-track model, as shown in Figure 6. As a result, the four steering control variables are reduced to two. The steering angle transformation relationship between the two models follows the Ackerman steering geometry [64].
where and denote the front and rear steering angles. denotes the wheelbase.
3.2. Vehicle Kinematic Model
The vehicle kinematic model is usually used to address the motion planning and control of vehicles at low-speed conditions, e.g., automatic parking control [65]. For motion control at high-speed conditions, the vehicle dynamic model is preferred [66].
The single-track kinematic model for 4WID-4WIS EV is derived as follows [67].
where denotes the longitudinal acceleration. is the position coordinate of the vehicle.
3.3. Path Tracking Model
According to the information difference of the target path, i.e., the target position coordinate or target path curvature, the path tracking model is divided into two types. The first kind of path tracking model is based on the given information of , and , which aims to minimize the following errors [68].
where , and denote the desired values for the target path.
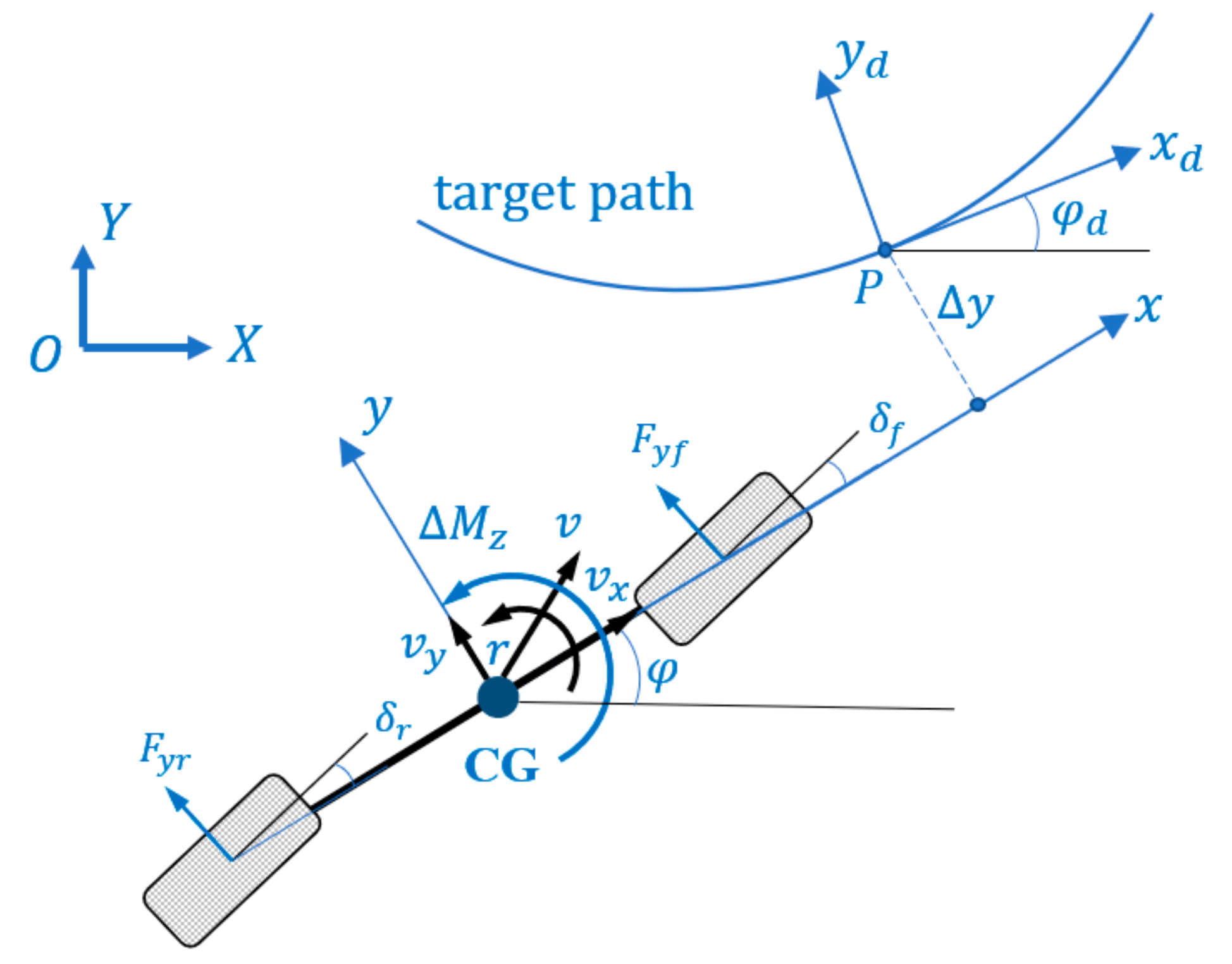
The second kind of path tracking model is derived according to the curvature information of the target path, which is illustrated in Figure 7. To make the vehicle track the target path precisely, the path-tracking problem is equivalent to minimizing the yaw angle error and the lateral offset , which are derived as follows [69].
where denotes the curvature of the target path.
4. Control of 4WID-4WIS EV for Autonomous Driving
In this section, the control framework of 4WID-4WIS EV is introduced. Then, the control algorithms and strategies of handling stability, rollover prevention and path tracking are reviewed and discussed. Finally, active fault-tolerate control algorithms for 4WID-4WIS EVs are introduced.
4.1. Control Framework of 4WID-4WIS EV
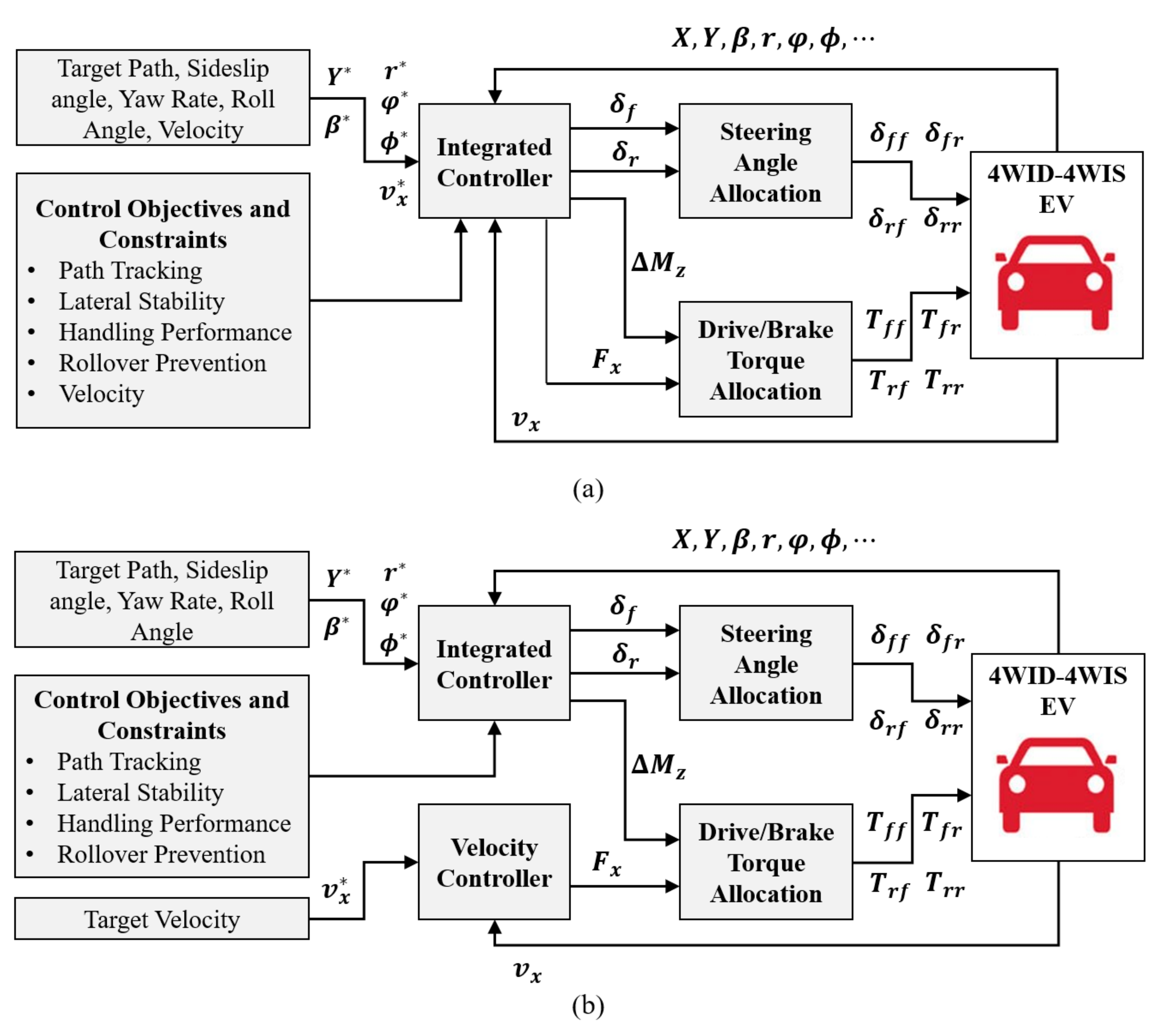
The control framework of 4WID-4WIS can be divided into two types, i.e., the coupling control framework [70] and the decoupling control framework [71], which are shown in Figure 8a,b, respectively. In the coupling control framework, the longitudinal motion control is coupled with the lateral motion control, which yields a multi-objective control. It brings a challenge to the control algorithm design. In the decoupling control framework, the longitudinal motion control is decoupled with the lateral motion control, which can reduce the complexity of controller design.
From Figure 8, we can find that both the coupling control framework and the decoupling control framework consist of two levels. The high level is the controller design. According to the control objectives of path tracking, lateral stability, handling performance, rollover prevention and velocity tracking, it aims to track various references including the target path, sideslip angle, yaw rate, roll angle and velocity. During the tracking control process, various control constraints must be considered. All the control algorithms are designed with an integrated controller. Then, the integrated controller outputs the control signals to the low-level control system, i.e., the allocation level.
The allocation level includes the steering angle allocation and the torque allocation. The steering angle allocation is based on Equation (4). The torque allocation algorithm is used to adjust the total longitudinal force and the external yaw moment , i.e., direct yaw-moment control (DYC). Various torque allocation algorithms have been studied including the direct allocation approach [72], affine control allocation [73], sequence least squares [74], weighted least squares [75], dynamic allocation [76], model predictive control (MPC) [77], etc. After torque allocation, the target drive/brake torques of four wheels will be worked out.
Finally, the allocation level will output the target steering angles and torques of four wheels to the 4WID-4WIS EV. For the closed-loop control, the vehicle’s motion state and position information will be fed back to the integrated controller and velocity controller.
Due to the application of the 4WID-4WIS technique, 4WID-4WIS EV has four kinds of control strategies for dynamic control, which are listed in Table 3, i.e., active front steering (AFS), AFS + DYC, 4WS, and 4WS + DYC. Due to the various control strategies, 4WID-4WIS EVs can achieve superior driving performance compared to conventional vehicles in terms of path tracking, handling stability and rollover prevention.
4.2. Handling Stability Control
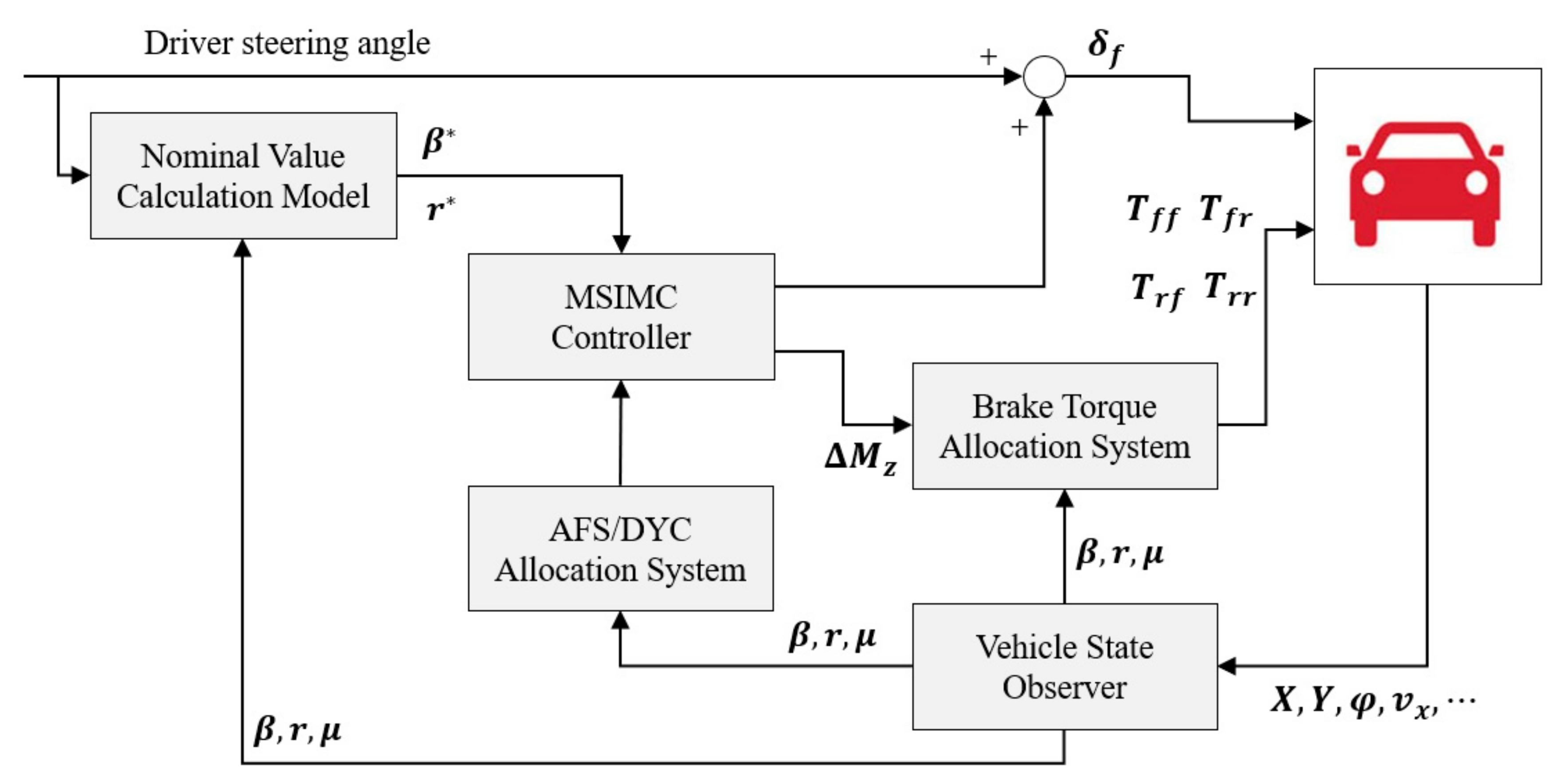
The handling stability control of vehicles is defined to track the desired sideslip angle and yaw rate [78]. For traditional FWS vehicles, only the front-wheel steering angle can be controlled. When conducting the steering maneuver at high-speed conditions, the front tire lateral force may enter the saturation region, which cannot provide enough force to guarantee the lateral stability of vehicles [79]. For 4WID-4WIS EVs, since the braking and drive torque of each wheel can be controlled independently, DYC can be realized easily. As a result, the external yaw moment can make up for the lack of tire lateral force to increase the handling stability. In [80], a BP-PID controller-based multi-model control system is proposed for lateral stability improvement via DYC. In [81], a novel control algorithm of DYC based on the correctional LQR is designed to realize vehicle dynamic stability control. Based on the slide model control (SMC), a DYC-based hierarchical control strategy is proposed to improve lateral stability at driving limits [82]. By calculating the stability boundary with the phase plane method, a new extension coordinated controller is designed to improve the driving stability and handling performance, which can find the best balance between AFS and DYC [83]. To enhance the lateral stability, a robust internal model control method with a modified structure is applied to the integrated controller design of AFS + DYC [84]. The control diagram is illustrated in Figure 9.
Compared with DYC, the 4WS technique makes it easier to realize zero sideslip angle. Meanwhile, it is not necessary to deal with the allocation of the external yaw moment and the total longitudinal force [85]. In [86], the linear-parameter-varying (LPV) model is used to simplify the nonlinear model, and the decoupling control is applied to the velocity tracking control and handling stability control. In [87], considering the velocity-varying motion, a LPV controller is designed for handling stability control of 4WS. In addition, the attenuation of diagonal decoupling (ADD) control is proposed for 4WS vehicles, which shows good robustness to address uncertainties and disturbances [88]. In [89], an internal model control (IMC) strategy is proposed to address the nonlinearity of the stability control system. Additionally, the multi-input-multi-output (MIMO) IMC is adopted for vehicle stability control [90]. In [91], a handling modification method is applied to the handling stability control of 4WS vehicles. Based on SMC, the decentralized control algorithm is robust to arbitrary lateral disturbances and can guarantee that the vehicle converges to reference yaw rate and zero sideslip [92]. Due to the advantage of strong robustness to deal with parametric uncertainties, external disturbances and sensor noise, robust control has been studied by many researchers and applied to the handling stability control in 4WS vehicles, including H2 control, H∞ control, and μ-synthesis control [93,94,95,96]. In [97], a H2/H∞ mixed robust controller is designed for stability control. In [98], pre-compensation decoupling control with H∞ performance is applied to the longitudinal motion control and handling stability control. In [99], the handling stability and system robustness are advanced with the μ-synthesis robust controller. In [100], varying parameters are considered in the vehicle model and the μ-synthesis controller is designed for 4WS. Although robust control approaches show strong robustness to deal with parametric perturbations, a large range of perturbation will lead to a high-order controller, which brings large amounts of calculation to the hardware. We need to find a good balance between control performance and calculation efficiency in the controller design.
With the advantages of 4WS and DYC, the combination of 4WS and DYC yields the superior handling stability for 4WID-4WIS EVs [101]. In [102,103], two feed-forward and feedback controllers are designed to realize zero sideslip angle and target yaw rate tracking with the integrated control of 4WS and DYC. In [104], a robust H∞ control approach is applied to the coordinated control of 4WS and DYC to improve handling stability in extreme conditions. In [105], fuzzy control theory is used to design the feedback controller of 4WS + DYC to improve lateral stability at high-speed conditions. To obtain a gain-scheduled controller, the LPV system is combined with the H∞ optimal control theory for the handling stability controller design of 4WS and DYC [106]. Besides, taking the tire nonlinearity into consideration, 4WS and DYC control are combined with the active suspension control to advance both the handling stability and the ride comfort [107]. Compared with AFS, the coordinate control of 4WS and DYC can advance the active safety of AVs at extreme conditions.
4.3. Rollover Prevention Control
Although the handling stability control can enhance the lateral driving safety at driving limits, for some vehicles with high size, e.g., trucks and buses, it is necessary to consider the rollover prevention performance [108]. The rollover prevention control is usually considered with the handling stability control [109]. The rollover index (RI) is usually used as the control performance index of rollover prevention. In [110], a RI is proposed to evaluate the rollover effect, a roll state estimator is designed, based on RI and the roll state estimator, and an integrated rollover mitigation controller is designed to reduce the danger of rollover without loss of vehicle lateral stability. Furthermore, a multiple-rollover-index (MRI) minimization approach is proposed to realize active rollover prevention control for heavy articulated vehicles [111].
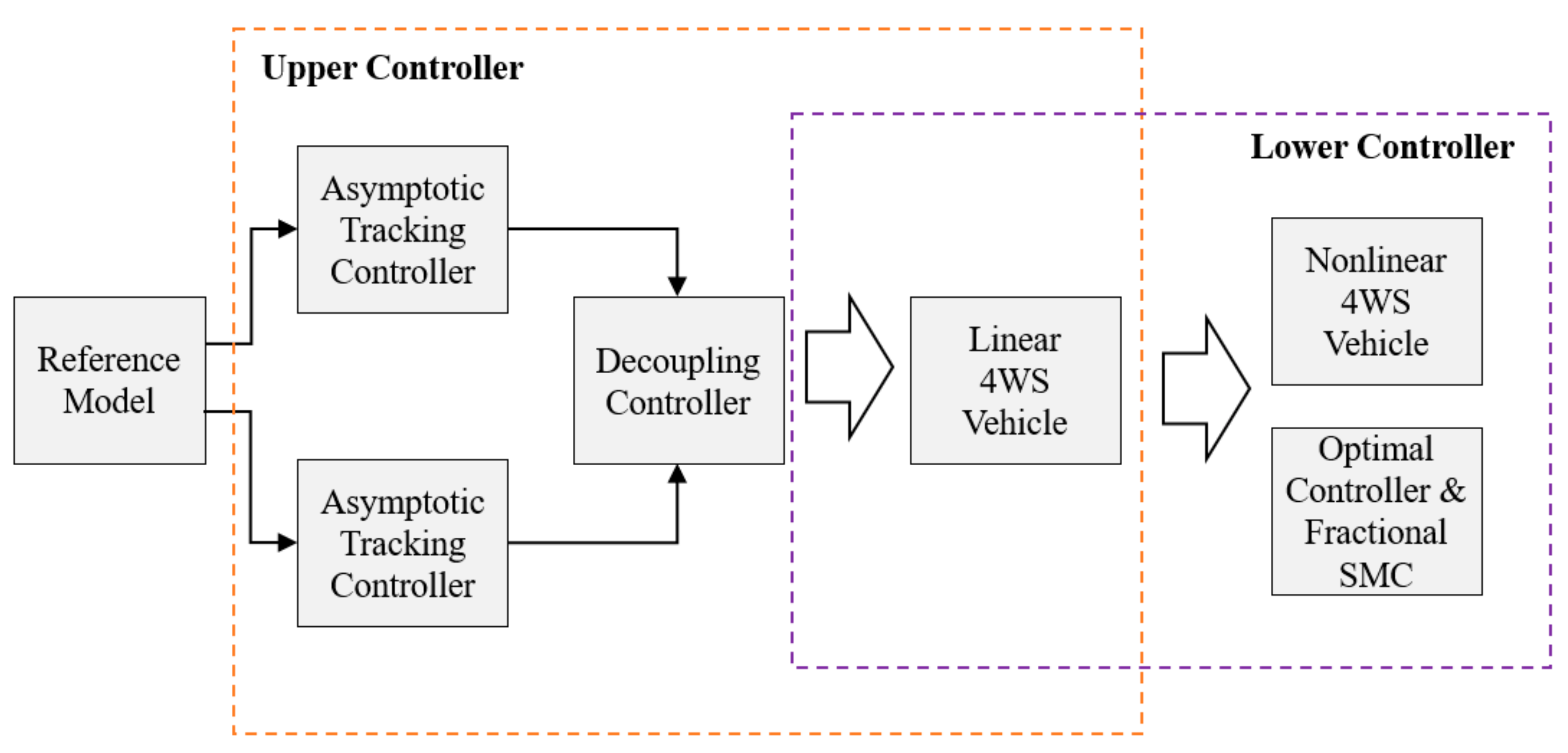
Different control algorithms have been designed for rollover prevention control. In [112], a linear quadratic static output feedback (LQSOF) approach is applied to the preview controller design for vehicle rollover prevention. In [113], a nonlinear control strategy is designed, which can guarantee the handling stability while preventing rollover. In [114,115], a pulsed steering system and a hydraulic-mechanical pulsed steering system are designed, which integrate the handling stability control and rollover prevention control. In [116], linear-time-varying (LTV) MPC is applied to the integrated controller design, which can advance lateral stability, handling performance and rollover prevention via the 4WS technique. In [117], the fuzzy SMC approach is applied to the vehicle dynamic control of 4WS vehicles, which can enhance the dynamic response and deal with system nonlinearity. As Figure 10 shows, in [118], a new type of hierarchical control is proposed for 4WS vehicles, which uses the fractional SMC to obtain good robustness. Although SMC shows good performance in terms of dealing with system nonlinearity, controller chattering is still a critical issue for application.
Additionally, 4WS and DYC are usually combined to advance the rollover prevention performance. With 4WS and DYC techniques, an integrated dynamic control with steering (IDCS) system is proposed to improve the handling stability and rollover prevention performance through fuzzy logic [119]. In [120], a switching MPC controller is designed to realize rollover prevention with active steering control and active differential braking control. Based on the SMC approach, a hierarchical coordinated control algorithm for integrating active steering control and driving/braking force distribution is proposed, which can enhance the handling stability and rollover prevention performance [121].
4.4. Path Trakcing Control
Path tracking control is the main control task for AVs [122]. Therefore, it has been widely studied in recent years and various control algorithms have been designed. In [123], DYC is used to advance the path tracking performance, and a robust H∞ control approach is applied to the DYC controller design. In [124], a coupling control framework is proposed based on DYC, and both the velocity tracking control and the path tracking control are considered with LTV MPC. In [125], based on LQR technique, both 4WS and DYC are utilized to improve the path-tracking performance. To improve the robustness of the path-tracking controller, a robust path-tracking controller is designed for the 4WID-4WIS agricultural robotic vehicle with the backstepping SMC theory [126]. To improve the control accuracy of the backstepping SMC, a comprehensive method that combines feedforward and backstepping SMC is applied to the path tracking control of 4WID-4WIS EVs [127]. In [128], a four-wheel SMC steering controller is designed for the path tracking of 4WID-4WIS EVs. Meanwhile, the longitudinal velocity controller is designed with the SMC approach.
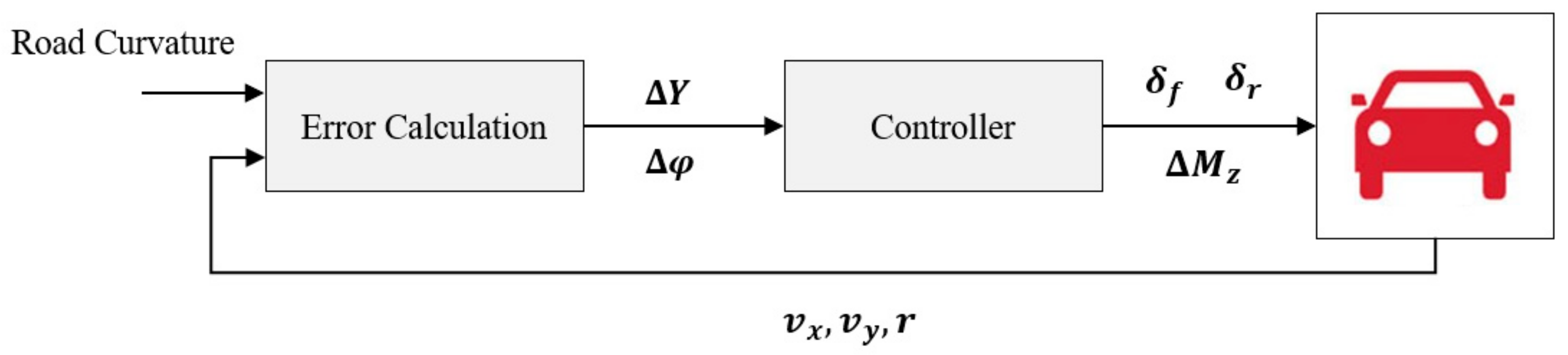
For low-speed autonomous driving, it is sufficient to consider the path tracking control. However, with the increase in vehicle speed, the issue of handling stability and rollover prevention becomes more and more prominent. The path tracking issue is needs to be considered together with handling stability at high-speed conditions, especially at extreme conditions [129]. Compared with traditional vehicles, 4WID-4WIS EV has more control DOF; therefore, it is easier to realize the integrated control of path tracking and handling stability. In [130], a LQR feedback controller is applied to the path tracking of 4WS under the condition of high-speed emergency obstacle avoidance. In addition to the path tracking issue, the issue of handling stability control is considered as well. However, LQR approach has poor robustness to deal with the system nonlinearity and uncertainties. A robust LQR controller is designed for path tracking via the integration of AFS and DYC [131]. Based on the SMC theory, an automatic path-tracking controller is designed for 4WS vehicle, which has strong robustness to deal with system uncertainties such as cornering power perturbation, path radius fluctuation, and cross wind disturbance [132]. In [133], Hamilton energy function control theory is applied to the path tracking and lateral stability control of the 4WS + DYC control system. Besides, a robust controller is applied to the integrated 4WS + DYC control system, which can not only improve the path-tracking performance and handling stability but also has good robustness to address parametric perturbation [134]. The control diagram is shown in Figure 11.
Moreover, MPC has been widely applied to the path tracking control of AVs [135]. In [136], a coupling control framework is designed based on MPC, which comprehensively considers the velocity tracking control, handling stability control and path tracking control. Besides, the road adhesion coefficient is estimated to improve the control accuracy. Based on the nonlinear 4WS vehicle model, nonlinear model predictive control (NMPC) is used to design an integrated controller that considers handling stability and path tracking [137]. Although MPC has superior control accuracy than other control algorithms, the real-time optimization brings a large amount of calculation to the hardware.
Finally, Table 4 shows the summary of various control instances for 4WID-4WIS EV. It can be found that the 2DOF single track model is the most common control model for 4WID-4WIS EVs. If the longitudinal motion control or rollover prevention control is considered, another control DOF is required, which yields a 3DOF control model. To advance handling stability, rollover prevention performance and path tracking performance, different control strategies, i.e., AFS + DYC, 4WS, and 4WS + DYC, have been widely applied to the dynamic control of 4WID-4WIS EVs. Furthermore, LQR, SMC, robust control and MPC are the common control algorithms for 4WID-4WIS EVs. LQR can only deal with linear systems. SMC and robust control have good robustness to address system uncertainties and disturbances, but their control performances are remarkably affected by the model accuracy. With model prediction and real-time optimization, MPC can realize accurate control, but the real-time optimization also brings a large amount of calculation to the hardware. Simulation, the hardware-in-the-loop (HIL) test and the road test are the three kinds of algorithm verification methods. It can be found that most papers evaluate the control algorithm with simulation. Only few papers conduct the road test. One important reason is that the techniques used for 4WID-4WIS EVs are not vary mature, especially for the X-by-wire technique, and their reliability and safety cannot be guaranteed completely. Road tests involve a degree safety risk.
4.5. Active Fault-Tolerant Control
Although X-by-wire modules can bring various control strategies and steering modes to 4WID-4WIS EVs in favor of driving performance advancement, once one X-by-wire module fails, it will increase the risk of vehicle instability [138]. To address this issue, active fault-tolerant control algorithms have been widely studied [139].
In [140], an MPC-based fault tolerant control system is designed, in which one MPC is used for fault tolerant control and another MPC is used as an observer to estimate and compensate for the actuator fault. In [141], a multiple model-based fault-tolerant control system is proposed based on fuzzy logic and MPC. In [142], a dual-loop SMC is used to deal with the fault of in-wheel motor. In [143], an adaptive SMC fault-tolerant controller is designed. Furthermore, a modified SMC is applied to the active fault-tolerant control of 4WID-4WIS EV, in which the steering geometry is re-arranged according to the location of faulty wheels [144]. In [145], a robust adaptive fault-tolerant control scheme is designed with adaptive fast terminal SMC. Moreover, game theory has been applied to the active fault-tolerant control. In [146], a cooperative game-based actuator fault-tolerant control strategy is designed based on a differential game. Additionally, feedback linearization and cooperative game theory are combined to design the fault-tolerant controller [147]. To advance the robustness of the fault-tolerate controller, a model-independent self-tuning fault-tolerant control framework is designed, which can enhance the longitudinal and lateral tracking ability under different failure conditions [148].
To improve the performance of monitor vehicle states, a fault detection and diagnosis algorithm is designed to monitor vehicle states and provide feedback containing fault information to the controller [149]. In [150], an active fault-tolerant control framework is designed, which includes a baseline controller, a set of reconfigurable controllers, a fault detection and diagnosis mechanism, and a decision mechanism.
Furthermore, control allocation methods have been widely used to realize active fault-tolerant control of 4WID-4WIS EVs [151]. In [152], an orientated tire force allocation algorithm is proposed to address the steering system fault in the path tracking process. In [29], based on the pseudo-inverse matrix, a control allocation method is introduced for decoupling of the forces and moment. Based on the LPV framework, reconfiguration control is applied to the torque allocation, which can realize velocity and path tracking even during a fault event of the steering-by-wire system [153]. In [154], based on the fault detection and diagnosis module, a reconfigurable control allocator is designed, which optimally distributes the generalized forces/moments to four wheels.
5. Challenges and Perspectives for 4WID-4WIS EV
Although 4WID-4WIS EV has superior performance than traditional vehicles, some critical technical issues related to machinery and control have not been resolved, which prevents its commercial application.
The first challenge is the high cost of 4WID-4WIS EV. Due to the application of the X-by-wire module, 12 control actuators are included in a 4WID-4WIS EV. Compared with traditional centralized-control vehicles, more actuators lead to higher cost. Therefore, cost reduction is the first consideration. The highly integrated design of the X-by-wire module and the concept of the reconfigurable chassis are good solutions. With the highly integrated X-by-wire module, the reconfigurable chassis can be formed with different numbers of X-by-wire modules according to different demands, and applied to different autonomous mobile platforms, e.g., four X-by-wire modules forming the autonomous passenger car, and eight X-by-wire modules forming the autonomous truck. Once the mission is finished, X-by-wire modules will be separated and ready for reorganization for the next mission.
The second challenge is that the mechanical structure and integration technique of the integrated X-by-wire module are not mature, especially in terms of dealing with extreme conditions. According to the literature review of the integrated X-by-wire module, it can be found that most X-by-wire modules adopt simple suspension structures, which cannot withstand huge lateral force. Therefore, existing 4WID-4WIS EVs can only travel in common conditions; they cannot deal with severe and extreme conditions. Therefore, it is necessary to design an advanced and practical X-by-wire module for the future applications of 4WID-4WIS EVs.
The third challenge is the reliability limitation of the X-by-wire technique. Compared with traditional mechanical systems, the reliability and safety of the X-by-wire technique are worse, and are generally untrustworthy. Since the 4WID-4WIS EV has 12 control actuators involved in steering, drive and braking, the probability of an actuator fault is still a crucial issue. Additionally, considering that the X-by-wire technique, and especially the steering-by-wire technique, is not a mature technique, it is necessary to design an effective active fault-tolerant control system to guarantee the functional safety of the system.
The last challenge is the control technique. For 4WID-4WIS EVs, which have nonlinear MIMO control systems, it is not easy to deal with the parametric uncertainties, external disturbances, and sensor noise with simple control algorithms, e.g., PID control. Although some control algorithms can realize accurate dynamic control and have good robustness, e.g., MPC, real-time optimization brings a large amount of calculation, which is a challenge for the hardware platform. Therefore, improving the computing efficiency of control algorithms is an urgent task. Additionally, as for multi-objective control, i.e., handling stability control, rollover prevention control, and path tracking control, there is no good adaptive control strategy to adjust the control priority and weighting to deal with different cases. For instance, at low-speed conditions, path tracking is the main control task. However, handling stability control and rollover prevention control must be given priority in extreme conditions.
6. Conclusions
Focusing on chassis configuration and control techniques, a literature review of—and various perspectives on—4WID-4WIS EVs are presented in this paper. Various prototypes of 4WID-4WIS EVs and integrated X-by-wire modules are introduced. Different chassis configurations and mechanical structures are compared and analyzed. Furthermore, the steering modes and switching logics of 4WID-4WIS EV are discussed. In addition, the common control models of 4WID-4WIS EV are summarized, including the kinematic model, dynamic model, and path tracking model. Based on different control models, different control objectives can be realized, including handling stability control, rollover prevention control, path tracking control, and active fault-tolerant control. For different control objectives, the control algorithms are reviewed and analyzed. Finally, for the development and application of 4WID-4WIS EV, some challenges, and perspectives are discussed, including the cost, mechanical design, control technique, etc.
Author Contributions
Writing—original draft preparation, P.H.; writing—review and editing, X.C. Both authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Key R&D Program of China (Grant No. 2018YFB0104802).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, G.; Cao, H.; Conradt, J.; Tang, H.; Rohrbein, F.; Knoll, A. Event-based neuromorphic vision for autonomous driving: A paradigm shift for bio-inspired visual sensing and perception. IEEE Signal Process. Mag. 2020, 37, 34–49. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, G.; Knoll, A. Globally optimal vertical direction estimation in Atlanta World. IEEE Trans. Pattern Anal. Mach. Intell. 2020. [Google Scholar] [CrossRef] [PubMed]
- Hang, P.; Lv, C.; Huang, C.; Xing, Y.; Hu, Z. Cooperative decision making of connected automated vehicles at multi-lane merging zone: A coalitional game approach. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Cao, D.; Hang, P. Toward human-vehicle collaboration: Review and perspectives on human-centered collaborative automated driving. Transp. Res. Part C Emerg. Technol. 2021, 128, 103199. [Google Scholar] [CrossRef]
- Huang, C.; Huang, H.; Hang, P.; Gao, H.; Wu, J.; Huang, Z.; Lv, C. Personalized Trajectory Planning and Control of Lane-Change Maneuvers for Autonomous Driving. IEEE Trans. Veh. Technol. 2021, 70, 5511–5523. [Google Scholar] [CrossRef]
- Chen, X.; Hang, P.; Wang, W.; Li, Y. Design and analysis of a novel wheel type continuously variable transmission. Mech. Mach. Theory 2017, 107, 13–26. [Google Scholar] [CrossRef]
- Huang, C.; Lv, C.; Hang, P.; Xing, Y. Toward Safe and Personalized Autonomous Driving: Decision-Making and Motion Control with DPF and CDT Techniques. IEEE/ASME Trans. Mechatron. 2021, 26, 611–620. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Mo, X.; Hu, Z.; Huang, C.; Hang, P. Toward Safe and Smart Mobility: Energy-Aware Deep Learning for Driving Behavior Analysis and Prediction of Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4267–4280. [Google Scholar] [CrossRef]
- Van Rensselar, J. New vehicle technology and market innovation. Tribol. Lubr. Technol. 2020, 76, 26–34. [Google Scholar]
- Biček, M.; Pepelnjak, T.; Pušavec, F. Production aspect of direct drive in-wheel motors. Procedia CIRP 2019, 81, 1278–1283. [Google Scholar] [CrossRef]
- Unseld, R. The next generation of vehicles will no longer have mechanical steering. ATZelectron. Worldw. 2020, 15, 14–17. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. Robust control in diagonal move steer mode and experiment on an X-by-wire UGV. IEEE/ASME Trans. Mechatron. 2019, 24, 572–584. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. A review for design and dynamics control of unmanned ground vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1084–1100. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. An AWID and AWIS X-by-wire UGV: Design and hierarchical chassis dynamics control. IEEE Trans. Intell. Transp. Syst. 2018, 20, 654–666. [Google Scholar] [CrossRef]
- Jiang, D.; Danhua, L.; Wang, S.; Tain, L.; Yang, L. Additional yaw moment control of a 4WIS and 4WID agricultural data acquisition vehicle. Int. J. Adv. Robot. Syst. 2015, 12, 78. [Google Scholar] [CrossRef] [Green Version]
- Demirci, M.; Gokasan, M. Adaptive optimal control allocation using Lagrangian neural networks for stability control of a 4WS–4WD electric vehicle. Trans. Inst. Meas. Control 2013, 35, 1139–1151. [Google Scholar] [CrossRef]
- Fahimi, F. Full drive-by-wire dynamic control for four-wheel-steer all-wheel-drive vehicles. Veh. Syst. Dyn. 2013, 51, 360–376. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Yu, Y.; Zheng, L. Integrated lateral control for 4WID/4WIS vehicle in high-speed condition considering the magnitude of steering. Veh. Syst. Dyn. 2020, 58, 1711–1735. [Google Scholar] [CrossRef]
- Ko, J.W.; Ko, S.Y.; Kim, I.S.; Hyun, D.Y.; Kim, H.S. Co-operative control for regenerative braking and friction braking to increase energy recovery without wheel lock. Int. J. Automot. Technol. 2014, 15, 253–262. [Google Scholar] [CrossRef]
- Milanés, V.; González, C.; Naranjo, J.E.; Onieva, E.; Pedro, T.D. Electro-hydraulic braking system for autonomous vehicles. Int. J. Automot. Technol. 2010, 11, 89–95. [Google Scholar] [CrossRef]
- Xu, G.; Li, W.; Xu, K.; Song, Z. An intelligent regenerative braking strategy for electric vehicles. Energies 2011, 4, 1461–1477. [Google Scholar] [CrossRef] [Green Version]
- Lam, T.L.; Yan, J.; Qian, H.; Xu, Y. Traction/braking force distribution algorithm for omni-directional all-wheel-independent-drive vehicles. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Lee, M.H.; Li, T.H.S. Kinematics, dynamics and control design of 4WIS4WID mobile robots. J. Eng. 2015, 2015, 6–16. [Google Scholar] [CrossRef]
- Bünte, T.; Ho, L.M.; Satzger, C.; Brembeck, J. Central vehicle dynamics control of the robotic research platform robomobil. ATZelektron. Worldw. 2014, 9, 58–64. [Google Scholar] [CrossRef]
- De Castro, R.; Bünte, T.; Brembeck, J. Design and validation of the second generation of the robomobil’s vehicle dynamics controller. In Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics (IAVSD 2015), Graz, Austria, 17–21 August 2015. [Google Scholar]
- Birnschein, T.; Kirchner, F.; Girault, B.; Yuksel, M.; MacHowinski, J. An innovative, comprehensive concept for energy efficient electric mobility-EO smart connecting car. In Proceedings of the 2012 IEEE International Energy Conference and Exhibition (ENERGYCON), Florence, Italy, 9–12 September 2012. [Google Scholar]
- Kraus, M.; Harkort, C.; Wuebbolt-Gorbatenko, B.; Laumann, M. Fusion of Drive and Chassis for a People Mover. ATZ Worldw. 2018, 120, 46–51. [Google Scholar] [CrossRef]
- Li, C.; Song, P.; Chen, G.; Zong, C.; Liu, W. Driving and Steering Coordination Control for 4WID/4WIS Electric Vehicle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- Liu, Y.; Zong, C.; Zhang, D.; Zheng, H.; Han, X.; Sun, M. Fault-tolerant control approach based on constraint control allocation for 4WIS/4WID vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2281–2295. [Google Scholar] [CrossRef]
- Lam, T.L.; Qian, H.; Xu, Y. Omnidirectional steering interface and control for a four-wheel independent steering vehicle. IEEE/ASME Trans. Mechatron. 2009, 15, 329–338. [Google Scholar]
- Qian, H.; Lam, T.L.; Li, W.; Xia, C. System and design of an omni-directional vehicle. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 21–26 February 2009. [Google Scholar]
- Lam, T.L.; Qian, H.; Xu, Y.; Xu, G. Omni-directional steer-by-wire interface for four wheel independent steering vehicle. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Ashley, S. Shrink-to-Fit Car for City Parking. In The New York Times; The New York Times Company: New York, NY, USA, 2012. [Google Scholar]
- Rasul, M.H.; Zamzuri, H.; Mustafa, A.M.A.; Ariff, M.H.M. Development of 4WIS SBW in-wheel drive compact electric vehicle platform. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Sabah, Malaysia, 31 May–3 June 2015. [Google Scholar]
- Hang, P.; Chen, X. Path tracking control of 4-wheel-steering autonomous ground vehicles based on linear parameter-varying system with experimental verification. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 411–423. [Google Scholar]
- Hang, P.; Chen, X.; Luo, F. Path-Tracking Controller Design for a 4WIS and 4WID Electric Vehicle with Steer-by-Wire System; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2017. [Google Scholar]
- Hang, P.; Han, Y.; Chen, X.; Zhang, B. Design of an active collision avoidance system for a 4WIS-4WID electric vehicle. IFAC PapersOnLine 2018, 51, 771–777. [Google Scholar] [CrossRef]
- Choi, M.W.; Park, J.S.; Lee, B.S.; Lee, M.H. The performance of independent wheels steering vehicle (4WS) applied Ackerman geometry. In Proceedings of the 2008 International Conference on Control, Automation and Systems, Seoul, Korea, 14–17 October 2008. [Google Scholar]
- Tu, X. Robust Navigation Control and Headland Turning Optimization of Agricultural Vehicles. Ph.D. Thesis, Iowa State University, Ames, IA, USA, 2013. [Google Scholar]
- Jung, S.; Guenther, D.A. An Examination of the Maneuverability of an All Wheel Steer Vehicle at Low Speed; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1991. [Google Scholar]
- Hang, P.; Chen, X.; Fang, S.; Luo, F. Robust control for four-wheel-independent-steering electric vehicle with steer-by-wire system. Int. J. Automot. Technol. 2017, 18, 785–797. [Google Scholar] [CrossRef]
- Kobayashi, T.; Katsuyama, E.; Sugiura, H.; Ono, E.; Yamamoto, M. Efficient direct yaw moment control: Tyre slip power loss minimisation for four-independent wheel drive vehicle. Veh. Syst. Dyn. 2018, 56, 719–733. [Google Scholar] [CrossRef]
- Chen, X.; Fang, S.; Hang, P.; Luo, F.; Wu, X. The steering modes switching control of four wheels independently steering-by-wire vehicle based on path planning. In Proceedings of the FISITA 2016 World Automotive Congress, Busan, South Korea, 26–30 September 2016. [Google Scholar]
- Chen, X.; Luo, F.; Hang, P.; Luo, J. Steering Mode Switch Control of Four-Wheel-Independent-Steering Electric Vehicle. In Proceedings of the 19th Asia Pacific Automotive Engineering Conference & SAE-China Congress 2017, Shanghai, China, 24–26 October 2017; pp. 437–453. [Google Scholar]
- Xu, F.; Liu, X.; Chen, W.; Zhou, C. Dynamic switch control of steering modes for four wheel independent steering rescue vehicle. IEEE Access 2019, 7, 135595–135605. [Google Scholar] [CrossRef]
- Lai, X.; Chen, X.B.; Wu, X.J.; Liang, D. A study on control system for four-wheels independent driving and steering electric vehicle. Appl. Mech. Mater. 2015, 701, 807–811. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Fang, S. Controller design of steer-by-wire 4WIS electric vehicle with various steering modes. In Proceedings of the FISITA 2016 World Automotive Congress, Busan, Korea, 26–30 September 2016. [Google Scholar]
- Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Ma, B. Path tracking of mining vehicles based on nonlinear model predictive control. Appl. Sci. 2019, 9, 1372. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Han, Y.; Hang, P. Researches on 4WIS-4WID Stability with LQR Coordinated 4WS and DYC. In The IAVSD International Symposium on Dynamics of Vehicles on Roads and Tracks; Springer: Cham, Switzerland, 2019; pp. 1508–1516. [Google Scholar]
- Hang, P.; Luo, F.; Fang, S.; Chen, X. Path tracking control of a four-wheel-independent-steering electric vehicle based on model predictive control. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]
- Hang, P.; Chen, X. Integrated chassis control algorithm design for path tracking based on four-wheel steering and direct yaw-moment control. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2019, 233, 625–641. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Zhang, B.; Tang, T. Longitudinal velocity tracking control of a 4WID electric vehicle. IFAC PapersOnLine 2018, 51, 790–795. [Google Scholar] [CrossRef]
- Baffet, G.; Charara, A.; Lechner, D. Estimation of vehicle sideslip, tire force and wheel cornering stiffness. Control Eng. Pract. 2009, 17, 1255–1264. [Google Scholar] [CrossRef] [Green Version]
- Ray, L.R. Nonlinear tire force estimation and road friction identification: Simulation and experiments. Automatica 1997, 33, 1819–1833. [Google Scholar] [CrossRef]
- Wang, R.; Wang, J. Tire–road friction coefficient and tire cornering stiffness estimation based on longitudinal tire force difference generation. Control Eng. Pract. 2013, 21, 65–75. [Google Scholar] [CrossRef]
- Pacejka, H.B.; Bakker, E. The magic formula tyre model. Veh. Syst. Dyn. 1992, 21, 1–18. [Google Scholar] [CrossRef]
- Ding, N.; Taheri, S. A modified Dugoff tire model for combined-slip forces. Tire Sci. Technol. 2010, 38, 228–244. [Google Scholar] [CrossRef]
- Guo, K.; Lu, D.; Chen, S.; Lin, W.C.; Lu, X. The UniTire model: A nonlinear and non-steady-state tyre model for vehicle dynamics simulation. Veh. Syst. Dyn. 2005, 43, 341–358. [Google Scholar] [CrossRef]
- Leng, B.; Jin, D.; Xiong, L.; Yang, X.; Yu, Z. Estimation of tire-road peak adhesion coefficient for intelligent electric vehicles based on camera and tire dynamics information fusion. Mech. Syst. Signal Process. 2021, 150, 107275. [Google Scholar] [CrossRef]
- Feng, Y.; Chen, H.; Zhao, H.; Zhou, H. Road tire friction coefficient estimation for four wheel drive electric vehicle based on moving optimal estimation strategy. Mech. Syst. Signal Process. 2020, 139, 106416. [Google Scholar] [CrossRef]
- Kim, S.; Nikravesh, P.E.; Gim, G. A two-dimensional tire model on uneven roads for vehicle dynamic simulation. Veh. Syst. Dyn. 2008, 46, 913–930. [Google Scholar] [CrossRef]
- Pacejka, H.B. Analysis of the dynamic response of a rolling string-type tire model to lateral wheel-plane vibrations. Veh. Syst. Dyn. 1972, 1, 37–66. [Google Scholar] [CrossRef]
- Hsu, Y.H.J.; Laws, S.M.; Gerdes, J.C. Estimation of tire slip angle and friction limits using steering torque. IEEE Trans. Control Syst. Technol. 2009, 18, 896–907. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Luo, F.; Fang, S. Robust control of a four-wheel-independent-steering electric vehicle for path tracking. SAE Int. J. Veh. Dyn. Stab. NVH 2017, 1, 307–316. [Google Scholar] [CrossRef]
- Hang, P.; Huang, S.; Chen, X.; Tan, K.K. Path planning of collision avoidance for unmanned ground vehicles: A nonlinear model predictive control approach. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 222–236. [Google Scholar]
- Hang, P.; Lv, C.; Huang, C.; Cai, J.; Hu, Z.; Xing, Y. An integrated framework of decision making and motion planning for autonomous vehicles considering social behaviors. IEEE Trans. Veh. Technol. 2020, 69, 14458–14469. [Google Scholar] [CrossRef]
- Hang, P.; Huang, C.; Hu, Z.; Xing, Y.; Lv, C. Decision Making of Connected Automated Vehicles at An Unsignalized Roundabout Considering Personalized Driving Behaviours. IEEE Trans. Veh. Technol. 2021, 70, 4051–4064. [Google Scholar] [CrossRef]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q. Review and comparison of path tracking based on model predictive control. Electronics 2019, 8, 1077. [Google Scholar] [CrossRef] [Green Version]
- Hang, P.; Chen, X.; Luo, F. LPV/H∞ controller design for path tracking of autonomous ground vehicles through four-wheel steering and direct yaw-moment control. Int. J. Automot. Technol. 2019, 20, 679–691. [Google Scholar] [CrossRef]
- Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Wang, J. Path tracking of wheeled mobile robots based on dynamic prediction model. IEEE Access 2019, 7, 39690–39701. [Google Scholar] [CrossRef]
- Han, Q.; Dai, L. A non-linear dynamic approach to the motion of four-wheel-steering vehicles under various operation conditions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2008, 222, 535–549. [Google Scholar] [CrossRef]
- Durham, W.C. Constrained control allocation. J. Guid. Control Dyn. 1993, 16, 717–725. [Google Scholar] [CrossRef]
- Oppenheimer, M.W.; Doman, D.B.; Bolender, M.A. Control allocation for over-actuated systems. In Proceedings of the 2006 14th Mediterranean Conference on Control and Automation, Ancona, Italy, 28–30 June 2006. [Google Scholar]
- Harkegard, O. Efficient active set algorithms for solving constrained least squares problems in aircraft control allocation. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002. [Google Scholar]
- Xiong, L.; Yu, Z.; Jiang, W.; Jiang, Z. Research on vehicle stability control of 4WD electric vehicle based on longitudinal force control allocation. J. Tongji Univ. Nat. Sci. 2010, 38, 417–421. [Google Scholar]
- Zaccarian, L. Dynamic allocation for input redundant control systems. Automatica 2009, 45, 1431–1438. [Google Scholar] [CrossRef]
- Skjong, S.; Pedersen, E. Nonangular MPC-based thrust allocation algorithm for marine vessels—a study of optimal thruster commands. IEEE Trans. Transp. Electrif. 2017, 3, 792–807. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Hu, Z.; Fu, C.; Nan, F. Integrated control of AFS and DYC for in-wheel-motor electric vehicles based on operation region division. Int. J. Veh. Des. 2019, 79, 221–247. [Google Scholar] [CrossRef]
- Feng, T.; Wang, Y.; Li, Q. Coordinated control of active front steering and active disturbance rejection sliding mode-based DYC for 4WID-EV. Meas. Control 2020, 53, 1870–1882. [Google Scholar] [CrossRef]
- Huang, G.; Yuan, X.; Shi, K.; Wu, X. A BP-PID controller-based multi-model control system for lateral stability of distributed drive electric vehicle. J. Frankl. Inst. 2019, 356, 7290–7311. [Google Scholar] [CrossRef]
- Li, L.; Jia, G.; Chen, J.; Zhu, H.; Cao, D.; Song, J. A novel vehicle dynamics stability control algorithm based on the hierarchical strategy with constrain of nonlinear tyre forces. Veh. Syst. Dyn. 2015, 53, 1093–1116. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, C. Electronic stability control for improving stability for an eight in-wheel motor-independent drive electric vehicle. Shock Vib. 2019, 2019, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Liang, X.; Wang, Q.; Zhao, L.; Wang, X. Extension coordinated control of four wheel independent drive electric vehicles by AFS and DYC. Control Eng. Pract. 2020, 101, 104504. [Google Scholar] [CrossRef]
- Wu, J.; Zhao, Y.Q.; Ji, X.W.; Liu, Y.H.; Yin, C.Q. A modified structure internal model robust control method for the integration of active front steering and direct yaw moment control. Sci. China Technol. Sci. 2015, 58, 75–85. [Google Scholar] [CrossRef]
- Canale, M.; Fagiano, L. Stability control of 4WS vehicles using robust IMC techniques. Veh. Syst. Dyn. 2008, 46, 991–1011. [Google Scholar] [CrossRef]
- Li, M.; Jia, Y. Decoupling control in velocity-varying four-wheel steering vehicles with H∞ performance by longitudinal velocity and yaw rate feedback. Veh. Syst. Dyn. 2014, 52, 1563–1583. [Google Scholar] [CrossRef]
- Li, M.; Jia, Y.; Du, J. LPV control with decoupling performance of 4WS vehicles under velocity-varying motion. IEEE Trans. Control Syst. Technol. 2014, 22, 1708–1724. [Google Scholar]
- Li, M.; Jia, Y.; Matsuno, F. Attenuating diagonal decoupling with robustness for velocity-varying 4WS vehicles. Control Eng. Pract. 2016, 56, 49–59. [Google Scholar] [CrossRef]
- Men, J.; Wu, B.; Chen, J.; Zhang, Z. Comparisons of vehicle stability controls based on 4WS, Brake, Brake-FAS and IMC techniques. Veh. Syst. Dyn. 2012, 50, 1053–1084. [Google Scholar]
- Men, J.; Wu, B.; Chen, J. Comparisons of 4WS and Brake-FAS based on IMC for vehicle stability control. J. Mech. Sci. Technol. 2011, 25, 1265–1277. [Google Scholar]
- Russell, H.E.B.; Gerdes, J.C. Design of variable vehicle handling characteristics using four-wheel steer-by-wire. IEEE Trans. Control Syst. Technol. 2015, 24, 1529–1540. [Google Scholar] [CrossRef]
- Wu, Y.; Li, B.; Zhang, N.; Du, H.; Zhang, B. Rear-steering based decentralized control of four-wheel steering vehicle. IEEE Trans. Veh. Technol. 2020, 69, 10899–10913. [Google Scholar] [CrossRef]
- Yaniv, O. Robustness to speed of 4WS vehicles for yaw and lateral dynamics. Veh. Syst. Dyn. 1997, 27, 221–234. [Google Scholar] [CrossRef]
- Canale, M.; Fagiano, L. Comparing rear wheel steering and rear active differential approaches to vehicle yaw control. Veh. Syst. Dyn. 2010, 48, 529–546. [Google Scholar] [CrossRef]
- Yu, H.; Gao, L. Two-degree-of-freedom vehicle steering controllers design based on four-wheel-steering-by-wire. Int. J. Veh. Auton. Syst. 2007, 5, 47–78. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Qin, X.; Wang, C. Yaw and lateral stability control for four-wheel steer-by-wire system. IEEE/ASME Trans. Mechatron. 2018, 23, 2628–2637. [Google Scholar] [CrossRef]
- Zhao, W.Z.; Qin, X.X. Study on mixed H2/H∞ robust control strategy of four wheel steering system. Sci. China Technol. Sci. 2017, 60, 1831–1840. [Google Scholar] [CrossRef]
- Li, M.; Jia, Y. Precompensation decoupling control with H∞ performance for 4WS velocity-varying vehicles. Int. J. Syst. Sci. 2016, 47, 3864–3875. [Google Scholar] [CrossRef]
- Yin, G.; Chen, N.; Li, P. Improving Handling Stability Performance of Four-Wheel Steering Vehicle via μ-Synthesis Robust Control. IEEE Trans. Veh. Technol. 2007, 56, 2432–2439. [Google Scholar] [CrossRef]
- Yin, G.D.; Chen, N.; Wang, J.X.; Wu, L.Y. A study on μ-synthesis control for four-wheel steering system to enhance vehicle lateral stability. J. Dyn. Syst. Meas. Control 2011, 133, 011002. [Google Scholar] [CrossRef]
- Abe, M.; Ohkubo, N.; Kano, Y. Comparison of 4WS and Direct Yaw Moment Control (DYC) for Improvement of Vehicle Handling Performance. JSAE Rev. 1995, 2, 214. [Google Scholar]
- Abe, M.; Ohkubo, N.; Kano, Y. A direct yaw moment control for improving limit performance of vehicle handling-comparison and cooperation with 4WS. Veh. Syst. Dyn. 1996, 25, 3–23. [Google Scholar] [CrossRef]
- Tianjun, Z.; Changfu, Z. Research on control algorithm for DYC and integrated control with 4WS. In Proceedings of the 2009 International Conference on Computational Intelligence and Natural Computing, Wuhan, China, 6–7 June 2009. [Google Scholar]
- Nagai, M.; Hirano, Y.; Yamanaka, S. Integrated control of active rear wheel steering and direct yaw moment control. Veh. Syst. Dyn. 1997, 27, 357–370. [Google Scholar] [CrossRef]
- Zhou, L.; Ou, L.; Wang, C. A simulation of the four-wheel steering vehicle stability based on DYC control. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009. [Google Scholar]
- Hang, P.; Xia, X.; Chen, X. Handling Stability Advancement With 4WS and DYC Coordinated Control: A Gain-Scheduled Robust Control Approach. IEEE Trans. Veh. Technol. 2021, 70, 3164–3174. [Google Scholar] [CrossRef]
- Furukawa, Y.; Abe, M. Advanced chassis control systems for vehicle handling and active safety. Veh. Syst. Dyn. 1997, 28, 59–86. [Google Scholar] [CrossRef]
- Chen, B.C.; Peng, H. Differential-braking-based rollover prevention for sport utility vehicles with human-in-the-loop evaluations. Veh. Syst. Dyn. 2001, 36, 359–389. [Google Scholar] [CrossRef]
- Rajamani, R.; Piyabongkarn, D.N. New paradigms for the integration of yaw stability and rollover prevention functions in vehicle stability control. IEEE Trans. Intell. Transp. Syst. 2012, 14, 249–261. [Google Scholar] [CrossRef]
- Yoon, J.; Cho, W.; Koo, B.; Yi, K. Unified chassis control for rollover prevention and lateral stability. IEEE Trans. Veh. Technol. 2008, 58, 596–609. [Google Scholar] [CrossRef]
- Huang, H.H.; Yedavalli, R.K.; Guenther, D.A. Active roll control for rollover prevention of heavy articulated vehicles with multiple-rollover-index minimisation. Veh. Syst. Dyn. 2012, 50, 471–493. [Google Scholar] [CrossRef]
- Yim, S. Design of a preview controller for vehicle rollover prevention. IEEE Trans. Veh. Technol. 2011, 60, 4217–4226. [Google Scholar] [CrossRef]
- Schofield, B.; Hagglund, T.; Rantzer, A. Vehicle dynamics control and controller allocation for rollover prevention. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006. [Google Scholar]
- Zhang, B.; Khajepour, A.; Goodarzi, A. Vehicle yaw stability control using active rear steering: Development and experimental validation. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2017, 231, 333–345. [Google Scholar] [CrossRef]
- Zhang, Y.; Khajepour, A.; Xie, X. Rollover prevention for sport utility vehicles using a pulsed active rear-steering strategy. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2016, 230, 1239–1253. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X.; Wang, W. Cooperative Control Framework for Human Driver and Active Rear Steering System to Advance Active Safety. IEEE Trans. Intell. Veh. 2020. [Google Scholar] [CrossRef]
- Alfi, A.; Farrokhi, M. Hybrid state-feedback sliding-mode controller using fuzzy logic for four-wheel-steering vehicles. Veh. Syst. Dyn. 2009, 47, 265–284. [Google Scholar] [CrossRef]
- Tian, J.; Ding, J.; Tai, Y.; Chen, N. Hierarchical control of nonlinear active four-wheel-steering vehicles. Energies 2018, 11, 2930. [Google Scholar] [CrossRef] [Green Version]
- Song, J. Integrated control of brake pressure and rear-wheel steering to improve lateral stability with fuzzy logic. Int. J. Automot. Technol. 2012, 13, 563–570. [Google Scholar] [CrossRef]
- Lee, S.; Yakub, F.; Kasahara, M.; Mori, Y. Rollover prevention with predictive control of differential braking and rear wheel steering. In Proceedings of the 2013 6th IEEE Conference on Robotics, Automation and Mechatronics (RAM), Manila, Philippines, 12–15 November 2013. [Google Scholar]
- Zhou, Z.; Miaohua, H.; Yachao, Z.; Chen, F. Vehicle Stability Control through Optimized Coordination of Active Rear Steering and Differential Driving/Braking. SAE Int. J. Passeng. Cars Mech. Syst. 2018, 11, 239–248. [Google Scholar] [CrossRef]
- Wu, J.; Cheng, S.; Liu, B.; Liu, C. A human-machine-cooperative-driving controller based on AFS and DYC for vehicle dynamic stability. Energies 2017, 10, 1737. [Google Scholar] [CrossRef] [Green Version]
- He, X.; Yang, K.; Liu, Y.; Ji, X. A Novel Direct Yaw Moment Control System for Autonomous Vehicle; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Lin, F.; Zhang, Y.; Zhao, Y.; Yin, G.; Zhang, H.; Wang, K. Trajectory tracking of autonomous vehicle with the fusion of DYC and longitudinal–lateral control. Chin. J. Mech. Eng. 2019, 32, 1–16. [Google Scholar] [CrossRef]
- Mashadi, B.; Ahmadizadeh, P.; Majidi, M. Integrated Controller Design for Path Following in Autonomous Vehicles; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2011. [Google Scholar]
- Tu, X.; Gai, J.; Tang, L. Robust navigation control of a 4WD/4WS agricultural robotic vehicle. Comput. Electron. Agric. 2019, 164, 104892. [Google Scholar] [CrossRef]
- Lei, Y.; Wen, G.; Fu, Y.; Li, X.; Hou, B.; Geng, X. Trajectory-following of a 4WID-4WIS vehicle via feedforward–backstepping sliding-mode control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W. Trajectory control for autonomous electric vehicles with in-wheel motors based on a dynamics model approach. IET Intell. Transp. Syst. 2016, 10, 318–330. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Li, K.; Dai, Y. Coordinated path-following and direct yaw-moment control of autonomous electric vehicles with sideslip angle estimation. Mech. Syst. Signal Process. 2018, 105, 183–199. [Google Scholar] [CrossRef]
- Liu, R.; Wei, M.; Zhao, W. Trajectory tracking control of four wheel steering under high speed emergency obstacle avoidance. Int. J. Veh. Des. 2018, 77, 1–21. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chadli, M.; Chen, N. Output constraint control on path following of four-wheel independently actuated autonomous vehicles. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Hiraoka, T.; Nishihara, O.; Kumamoto, H. Automatic path-tracking controller of a four-wheel steering vehicle. Veh. Syst. Dyn. 2009, 47, 1205–1227. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Sun, X. Simultaneous path following and lateral stability control of 4WD-4WS autonomous electric vehicles with actuator saturation. Adv. Eng. Softw. 2019, 128, 46–54. [Google Scholar] [CrossRef]
- Mashadi, B.; Ahmadizadeh, P.; Majidi, M.; Mahmoodi-Kaleybar, M. Integrated robust controller for vehicle path following. Multibody Syst. Dyn. 2015, 33, 207–228. [Google Scholar] [CrossRef]
- Zhang, H.; Heng, B.; Zhao, W. Path tracking control for active rear steering vehicles considering driver steering characteristics. IEEE Access 2020, 8, 98009–98017. [Google Scholar] [CrossRef]
- Liu, R.; Wei, M.; Sang, N.; Wei, J. Research on curved path tracking control for four-wheel steering vehicle considering road adhesion coefficient. Math. Probl. Eng. 2020, 2020, 1–18. [Google Scholar] [CrossRef]
- Yu, C.; Zheng, Y.; Shyrokau, B.; Ivanov, V. MPC-based path following design for automated vehicles with rear wheel steering. In Proceedings of the 2021 IEEE International Conference on Mechatronics (ICM), Kashiwa, Japan, 7–9 March 2021. [Google Scholar]
- Wang, Y.; Zong, C.; Li, K.; Chen, H. Fault-tolerant control for in-wheel-motor-driven electric ground vehicles in discrete time. Mech. Syst. Signal Process. 2019, 121, 441–454. [Google Scholar] [CrossRef]
- Li, C.; Chen, G.; Zong, C. Fault-Tolerant Control for 4WID/4WIS Electric Vehicles; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2014. [Google Scholar] [CrossRef]
- Shi, K.; Yuan, X. MPC-based fault tolerant control system for yaw stability of distributed drive electric vehicle. In Proceedings of the 2019 3rd Conference on Vehicle Control and Intelligence (CVCI), Hefei, China, 21–22 September 2019. [Google Scholar]
- Liu, L.; Shi, K.; Yuan, X.; Li, Q. Multiple model-based fault-tolerant control system for distributed drive electric vehicle. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 1–15. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, W.; Wang, J. Fault-tolerant control for electric vehicles with independently driven in-wheel motors considering individual driver steering characteristics. IEEE Trans. Veh. Technol. 2019, 68, 4527–4536. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, G.; Zhou, H.; Zhao, W. Adaptive sliding mode fault-tolerant coordination control for four-wheel independently driven electric vehicles. IEEE Trans. Ind. Electron. 2018, 65, 9090–9100. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W. Fault-tolerant control of electric vehicles with in-wheel motors using actuator-grouping sliding mode controllers. Mech. Syst. Signal Process. 2016, 72, 462–485. [Google Scholar] [CrossRef] [Green Version]
- Guo, B.; Chen, Y. Robust adaptive fault-tolerant control of four-wheel independently actuated electric vehicles. IEEE Trans. Ind. Inform. 2019, 16, 2882–2894. [Google Scholar] [CrossRef]
- Zhang, B.; Lu, S.; Zhao, L.; Xiao, K. Fault-tolerant control based on 2D game for independent driving electric vehicle suffering actuator failures. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 3011–3025. [Google Scholar] [CrossRef]
- Zhang, B.; Lu, S. Fault-tolerant control for four-wheel independent actuated electric vehicle using feedback linearization and cooperative game theory. Control Eng. Pract. 2020, 101, 104510. [Google Scholar] [CrossRef]
- Luo, Y.; Luo, J.; Qin, Z. Model-independent self-tuning fault-tolerant control method for 4WID EV. Int. J. Automot. Technol. 2016, 17, 1091–1100. [Google Scholar] [CrossRef]
- Liu, C.; Zong, C.; He, L.; Li, C.; Liu, M. Actuator Fault Detection and Diagnosis of 4WID/4WIS Electric Vehicles. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2013, 7. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, H.; Huang, X.; Wang, J.; Yu, H.; Graaf, R. Active fault-tolerant control for electric vehicles with independently driven rear in-wheel motors against certain actuator faults. IEEE Trans. Control Syst. Technol. 2015, 24, 1557–1572. [Google Scholar] [CrossRef]
- Liu, C.; Zong, C.; He, L.; Liu, J.; Li, C. Passive Fault-Tolerant Performance of 4WID/4WIS Electric Vehicles Based on MPC and Control Allocation; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2013. [Google Scholar]
- Chen, T.; Chenc, L.; Xu, X.; Cai, Y.; Jiang, H.; Sun, X. Passive fault-tolerant path following control of autonomous distributed drive electric vehicle considering steering system fault. Mech. Syst. Signal Process. 2019, 123, 298–315. [Google Scholar] [CrossRef]
- Mihály, A.; Gáspár, P. Reconfgurable fault-tolerant control of in-wheel electric vehicles with steering system failure. IFAC PapersOnLine 2015, 48, 49–54. [Google Scholar] [CrossRef]
- Zhang, Y.; Zheng, H.; Zhang, J.; Cheng, C. A Fault-Tolerant Control Method for 4WIS/4WID Electric Vehicles Based on Reconfigurable Control Allocation; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
Figure 1.
Chassis configuration of 4WID-4WIS EV.

Figure 2.
Protypes of 4WID-4WIS EV: (a) Toyota Fine-T; (b) Nissan PIVO3; (c) ROboMObil; (d) DFKI EO Smart 2; (e) Schaeffler Mover; (f) Jilin University; (g) CUHK OK-1; (h) MIT Hiriko; (i) UTM; (j) Tongji University.
Figure 2.
Protypes of 4WID-4WIS EV: (a) Toyota Fine-T; (b) Nissan PIVO3; (c) ROboMObil; (d) DFKI EO Smart 2; (e) Schaeffler Mover; (f) Jilin University; (g) CUHK OK-1; (h) MIT Hiriko; (i) UTM; (j) Tongji University.

Figure 3.
Integrated X-by-wire module for 4WID-4WIS EV.

Figure 4.
Steering modes of 4WID-4WIS EV: (a) FWS; (b) RWS; (c) 4WS; (d) oblique moving; (e) crab moving; (f) pivot steering.
Figure 4.
Steering modes of 4WID-4WIS EV: (a) FWS; (b) RWS; (c) 4WS; (d) oblique moving; (e) crab moving; (f) pivot steering.

Figure 5.
Dynamic model of 4WID-4WIS EV.

Figure 6.
Single-track model for 4WID-4WIS EV.

Figure 7.
Path-tracking model for 4WID-4WIS EV.

Figure 8.
Control framework of 4WID-4WIS EV: (a) Coupling control framework; (b) decoupling control framework. * denotes the target reference.
Figure 8.
Control framework of 4WID-4WIS EV: (a) Coupling control framework; (b) decoupling control framework. * denotes the target reference.

Figure 9.
Control diagram of the AFS + DYC control system in [84].
Figure 9.
Control diagram of the AFS + DYC control system in [84].

Figure 10.
Control diagram of the 4WS control system in [118].
Figure 10.
Control diagram of the 4WS control system in [118].

Figure 11.
Control diagram of the integrated 4WS + DYC control system in [134].
Figure 11.
Control diagram of the integrated 4WS + DYC control system in [134].


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Configuration analysis of 4WID-4WIS EV.
| Protype | Steering Angle | Speed | Autonomous Driving | Reference |
|---|---|---|---|---|
| Toyota Fine-T | - | [22] | ||
| Nissan PIVO3 | - | [23] | ||
| ROboMObil | 100 km/h | [24,25] | ||
| DFKI EO Smart 2 | 65 km/h | [26] | ||
| Schaeffler Mover | 60 km/h | [27] | ||
| Jilin University | 8 km/h | [28,29] | ||
| CUHK OK-1 | 10 km/h | [30,31,32] | ||
| MIT Hiriko | 50 km/h | [33] | ||
| UTM | 30 km/h | [34] | ||
| Tongji University | 10 km/h | [35,36,37] | ||
| FABOT | 3 km/h | [38] | ||
| AgRover | 5 km/h | [39] |
Table 2.
Structure analysis of integrated X-by-wire modules for 4WID-4WIS EV.
| Type | Steering | Drive | Braking | Suspension |
|---|---|---|---|---|
| Protean | In-wheel motor () | HB + Motor | Candle type | |
| Schaeffler | In-wheel motor () | HB + Motor | Trailing arm type | |
| ROboMObil | In-wheel motor () | HB + Motor | Double wishbone type | |
| Tongji | In-wheel motor () | HB + Motor | Candle type |
Table 3.
Control Strategies of 4WID-4WIS EV.
| Control Strategy | Control Variable |
|---|---|
| AFS | |
| AFS + DYC | , |
| 4WS | , |
| 4WS + DYC | ,, |
Table 4.
Summary of various control instances.
| Reference | Control Objective | Control Model | Control Strategy | Control Algorithm | Test Environment |
|---|---|---|---|---|---|
| [80] | HS | 2DOF | AFS + DYC | BP PID | Simulation |
| [81] | HS | 2DOF | AFS + DYC | LQR | HIL Test |
| [82] | HS | 2DOF | AFS + DYC | SMC | HIL Test |
| [83] | HS | 2DOF | AFS + DYC | Coordinated control | HIL Test |
| [84] | HS | 2DOF | AFS + DYC | H∞ control | Simulation |
| [89] | HS | 2DOF | 4WS | Internal model control | Simulation |
| [90] | HS | 2DOF | 4WS | Internal model control | Simulation |
| [99] | HS | 2DOF | 4WS | μ-synthesis | Simulation |
| [100] | HS | 2DOF | 4WS | μ-synthesis | HIL Test |
| [92] | HS | 2DOF | 4WS | Feed-forward control | Simulation |
| [97] | HS | 2DOF | 4WS | H2/H∞ | Simulation |
| [95] | HS | 2DOF | 4WS | LPV H∞ | Simulation |
| [96] | HS | 2DOF | 4WS | μ-synthesis | Road Test |
| [87] | HS + VC | 3DOF | 4WS | LPV | Simulation |
| [88] | HS + VC | 3DOF | 4WS | Decoupling control | Simulation |
| [98] | HS + VC | 3DOF | 4WS | Decoupling control | Simulation |
| [102] | HS | 2DOF | 4WS + DYC | Feed-forward, feedback | Simulation |
| [104] | HS | 2DOF | 4WS + DYC | H∞ control | Simulation |
| [105] | HS | 2DOF | 4WS + DYC | fuzzy control | Simulation |
| [111] | HS + RP | 3DOF | AFS + DYC | LQR | Simulation |
| [117] | HS + RP | 3DOF | 4WS | Fuzzy SMC | Simulation |
| [118] | HS + RP | 3DOF | 4WS | Fractional SMC | Simulation |
| [116] | HS + RP | 3DOF | 4WS | LTV-MPC | Simulation |
| [119] | HS + RP + VC | 4DOF | 4WS | Fuzzy logic | Simulation |
| [121] | HS + RP | 3DOF | 4WS + DYC | SMC | Simulation |
| [123] | PT + HS | 2DOF | AFS + DYC | H∞ control | Simulation |
| [124] | PT + HS + VC | 3DOF | AFS + DYC | MPC | Simulation |
| [129] | PT + HS | 2DOF | AFS + DYC | LTV-MPC | Road Test |
| [127] | PT + HS | 2DOF | 4WS | SMC | Simulation |
| [132] | PT + HS | 2DOF | 4WS | SMC | Simulation |
| [126] | PT + VC | 3DOF | 4WS | Backstepping SMC | Road Test |
| [136] | PT + VC | 3DOF | 4WS | MPC | Simulation |
| [137] | PT + VC | 3DOF | 4WS | MPC | Simulation |
| [125] | PT | 2DOF | 4WS + DYC | LQR | Simulation |
| [133] | PT + HS | 2DOF | 4WS + DYC | Hamilton | Simulation |
| [134] | PT + HS | 2DOF | 4WS + DYC | μ-synthesis | Simulation |
Where HS, PT, RP, and VC are the abbreviation of handling stability, path tracking, rollover prevention and velocity control, respectively.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Hang, P.; Chen, X. Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles. Actuators 2021, 10, 184. https://0-doi-org.brum.beds.ac.uk/10.3390/act10080184
AMA Style
Hang P, Chen X. Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles. Actuators. 2021; 10(8):184. https://0-doi-org.brum.beds.ac.uk/10.3390/act10080184
Chicago/Turabian StyleHang, Peng, and Xinbo Chen. 2021. "Towards Autonomous Driving: Review and Perspectives on Configuration and Control of Four-Wheel Independent Drive/Steering Electric Vehicles" Actuators 10, no. 8: 184. https://0-doi-org.brum.beds.ac.uk/10.3390/act10080184
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.