Using Spatial Validity and Uncertainty Metrics to Determine the Relative Suitability of Alternative Suites of Oceanographic Data for Seabed Biotope Prediction. A Case Study from the Barents Sea, Norway

 , ,
, ,
Abstract
:1. Introduction
2. Methods
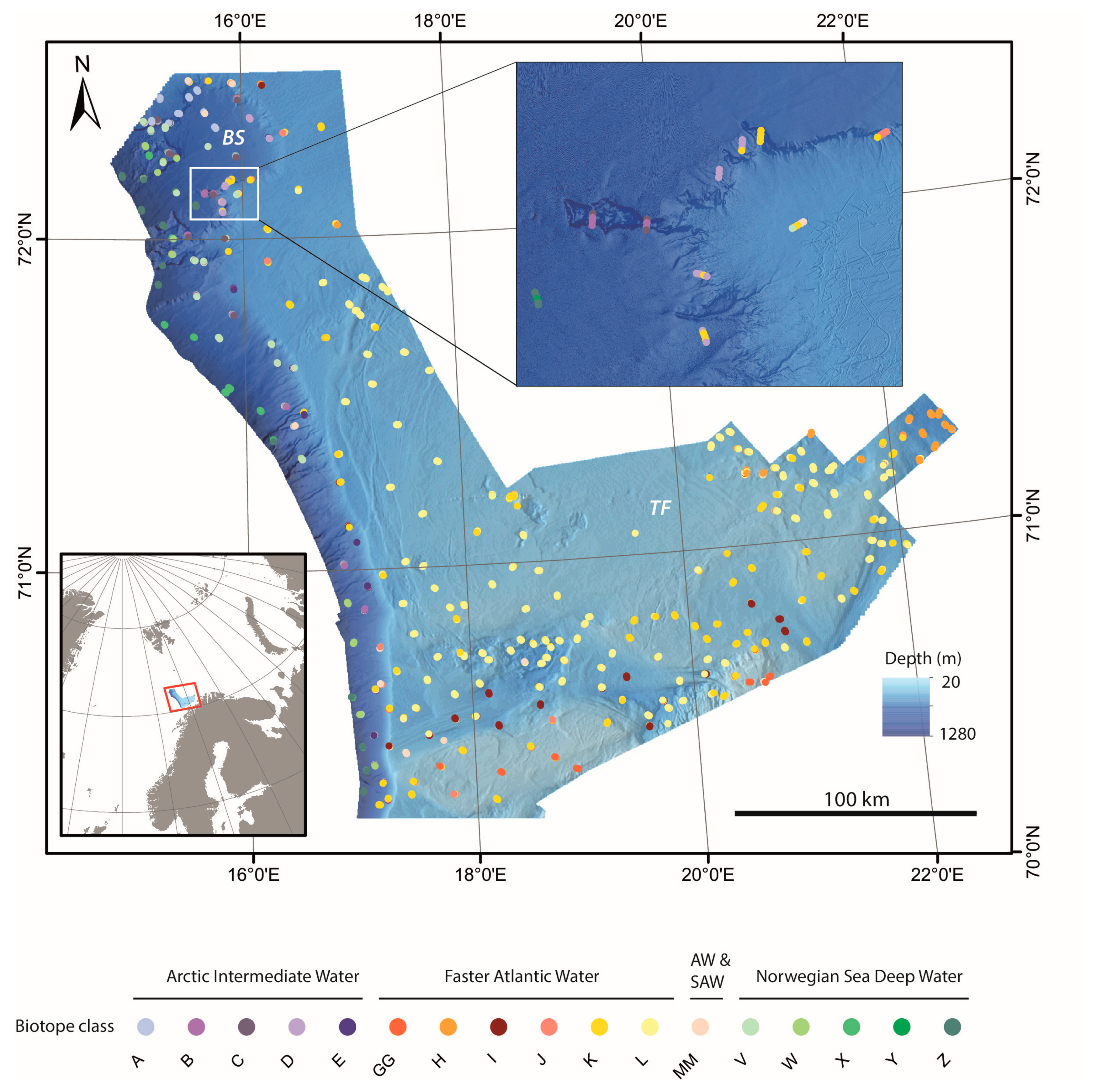
2.1. Study Area
2.2. Biotope Modelling
2.2.1. Response Variable–Classified Biotope Point Data
2.2.2. Predictor Variables–Oceanographic and Common Baseline Data
Bathymetric Data
Geological Data
Geographic Variables
Oceanographic Model Data
2.2.3. Biotope Modelling Workflow
2.2.4. Area of Applicability
2.2.5. Spatial Uncertainty
Visual Comparison of Classified Map
Combined Confidence
Confusion Index
Shannon Entropy Index
3. Results
3.1. Accuracy Statistics
3.2. Relative Variable Importance
3.3. Visual Comparison of Classified Biotope Maps
3.4. Spatial Validity
3.5. Spatial Uncertainty
4. Discussion
4.1. Scales of Evaluation of the Classified Maps
4.2. Spatial Validity and Uncertainty Indices
4.3. Based on the Map Results Which Oceanographic Data Do We Need, If Any?
4.4. Limitations and Further Work
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B

Appendix C



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Biotope | CombConf Density Plot Characteristics |
|---|---|
| A | Only the SW model performs well with high CombConf values dominating. B model peaks at only moderately high values, N4k shows a slight trend toward higher CombConf values while Base model has peaks at both high and low CombConf. |
| B | All models dominated by low CombConf values. |
| C | All models dominated by low CombConf values. |
| D | Generally low CombConf values dominate, SW has a peak at moderately low values. No model achieves high CombConf values. |
| E | All models dominated by low CombConf values |
| GG | All models skewed toward high CombConf values. B model achieves the highest values. SW and N4k trends are similar. Base model shows a slightly more even distribution including a secondary peak at low values. |
| H | All models skewed toward high CombConf values. Base model peaks at lower CombConf values than the other models. Secondary peak at low values for all but N4k model. |
| I | Multiple peaks in all models. Low to moderate confidence only. |
| J | All models dominated by low CombConf values. |
| K | Skew only slightly right of centre indicating slight dominance of moderately high confidence for all models but most values between 0.25 and 0.75. |
| L | Skew to right indicating dominance of high CombConf values for all models. Secondary peak at low values for Base and N4k models. |
| MM | All models dominated by low CombConf values. |
| V | All models dominated by moderately low CombConf values. |
| W | All models dominated by low CombConf values. |
| X | Multiple peaks for all models with low CombConf values dominant. N4k model peaks in high CombConf but without general trend towards high values. Base model peaks in low values. |
| Y | All models dominated by low CombConf values. |
| Z | Skew to right indicating dominance of high CombConf values for all models. Slight secondary peak at low values for all but SW model. |


References
- Pearman, T.R.R.; Robert, K.; Callaway, A.; Hall, R.; Lo Iacono, C.; Huvenne, V.A.I. Improving the predictive capability of benthic species distribution models by incorporating oceanographic data–Towards holistic ecological modelling of a submarine canyon. Prog. Oceanogr. 2020, 184, 102338. [Google Scholar] [CrossRef]
- Young, M.A.; Treml, E.A.; Beher, J.; Fredle, M.; Gorfine, H.; Miller, A.D.; Swearer, S.E.; Ierodiaconou, D. Using species distribution models to assess the long-term impacts of changing oceanographic conditions on abalone density in south east Australia. Ecography 2020, 43, 1052–1064. [Google Scholar] [CrossRef]
- Wilson, M.F.J. Deep Sea Habitat Mapping Using a Remotely Operated Vehicle: Mapping and Modelling Seabed Terrain and Benthic Habitat at Multiple Scales in the Porcupine Seabight, SW Ireland; Department of Earth and Ocean Sciences, National University of Ireland: Galway, Ireland, 2006. [Google Scholar]
- Guinan, J.; Brown, C.; Dolan, M.F.J.; Grehan, A.J. Ecological niche modelling of the distribution of cold-water coral habitat using underwater remote sensing data. Ecol. Inform. 2009, 4, 83–92. [Google Scholar] [CrossRef]
- Rubec, P.J.; Lewis, J.; Reed, D.; Santi, C.; Weisberg, R.H.; Zheng, L.Y.; Jenkins, C.; Ashbaugh, C.F.; Lashley, C.; Versaggi, S. Linking Oceanographic Modeling and Benthic Mapping with Habitat Suitability Models for Pink Shrimp on the West Florida Shelf. Mar. Coast. Fish. 2016, 8, 160–176. [Google Scholar] [CrossRef] [Green Version]
- Jalali, A.; Young, M.; Huang, Z.; Gorfine, H.; Ierodiaconou, D. Modelling current and future abundances of benthic invertebrates using bathymetric LiDAR and oceanographic variables. Fish. Oceanogr. 2018, 27, 587–601. [Google Scholar] [CrossRef]
- Ross, R.E.; Howell, K.L. Use of predictive habitat modelling to assess the distribution and extent of the current protection of ’listed’ deep-sea habitats. Divers. Distrib. 2013, 19, 433–445. [Google Scholar] [CrossRef] [Green Version]
- Buhl-Mortensen, P.; Dolan, M.; Buhl-Mortensen, L. Prediction of benthic biotopes on a Norwegian offshore bank using a combination of multivariate analysis and GIS classification. ICES J. Mar. Sci. 2009, 66, 2026–2032. [Google Scholar] [CrossRef]
- Dolan, M.F.J.; Buhl-Mortensen, P.; Thorsnes, T.; Buhl-Mortensen, L.; Bellec, V.K.; Bøe, R. Developing seabed nature-type maps offshore Norway: Initial results from the MAREANO programme. Nor. J. Geol. 2009, 89, 17–28. [Google Scholar]
- Elvenes, S.; Dolan, M.F.J.; Buhl-Mortensen, P.; Bellec, V.K. An evaluation of compiled single-beam bathymetry data as a basis for regional sediment and biotope mapping. ICES J. Mar. Sci. 2014, 71, 867–881. [Google Scholar] [CrossRef] [Green Version]
- Buhl-Mortensen, P.; Dolan, M.F.J.; Ross, R.E.; Gonzalez-Mirelis, G.; Buhl-Mortensen, L.; Bjarnadóttir, L.R.; Albretsen, J. Classification and Mapping of Benthic Biotopes in Arctic and Sub-Arctic Norwegian Waters. Front. Mar. Sci. 2020, 7, 271. [Google Scholar] [CrossRef]
- Gonzalez-Mirelis, G.; Buhl-Mortensen, P. Modelling benthic habitats and biotopes off the coast of Norway to support spatial management. Ecol. Inform. 2015, 30, 284–292. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Mirelis, G.; Ross, R.; Albretsen, J.; Buhl-Mortensen, P. Modelling the distribution of habitat-forming, deep-sea sponges in the Barents Sea: The value of data. Front. Mar. Sci. 2021, 7, 496688. [Google Scholar] [CrossRef]
- Haidvogel, D.B.; Arango, H.; Budgell, W.P.; Cornuelle, B.D.; Curchitser, E.; Di Lorenzo, E.; Fennel, K.; Geyer, W.R.; Hermann, A.J.; Lanerolle, L.; et al. Ocean forecasting in terrain-following coordinates: Formulation and skill assessment of the Regional Ocean Modeling System. J. Comput. Phys. 2008, 227, 3595–3624. [Google Scholar] [CrossRef]
- Shchepetkin, A.F.; McWilliams, J.C. The regional oceanic modeling system (ROMS): A split-explicit, free-surface, topography-following-coordinate oceanic model. Ocean Model. 2005, 9, 347–404. [Google Scholar] [CrossRef]
- Myksvoll, M.S.; Jung, K.M.; Albretsen, J.; Sundby, S. Modelling dispersal of eggs and quantifying connectivity among Norwegian coastal cod subpopulations. ICES J. Mar. Sci. 2014, 71, 957–969. [Google Scholar] [CrossRef] [Green Version]
- Myksvoll, M.S.; Sandvik, A.D.; Johnsen, I.A.; Skarðhamar, J.; Albretsen, J. Impact of variable physical conditions and future increased aquaculture production on lice infestation pressure and its sustainability in Norway. Aquac. Environ. Interact. 2020, 12, 193–204. [Google Scholar] [CrossRef]
- Sandvik, A.D.; Bjorn, P.A.; Adlandsvik, B.; Asplin, L.; Skarðhamar, J.; Johnsen, I.A.; Myksvoll, M.; Skogen, M.D. Toward a model-based prediction system for salmon lice infestation pressure. Aquac. Environ. Interact. 2016, 8, 527–542. [Google Scholar] [CrossRef]
- Vernet, M.; Ellingsen, I.H.; Seuthe, L.; Slagstad, D.; Cape, M.R.; Matrai, P.A. Influence of Phytoplankton Advection on the Productivity Along the Atlantic Water Inflow to the Arctic Ocean. Front. Mar. Sci. 2019, 6, 583. [Google Scholar] [CrossRef] [Green Version]
- Assis, J.; Tyberghein, L.; Bosch, S.; Verbruggen, H.; Serrao, E.A.; De Clerck, O. Bio-ORACLE v2.0: Extending marine data layers for bioclimatic modelling. Glob. Ecol. Biogeogr. 2018, 27, 277–284. [Google Scholar] [CrossRef]
- Asplin, L.; Albretsen, J.; Johnsen, I.A.; Sandvik, A.D. The hydrodynamic foundation for salmon lice dispersion modeling along the Norwegian coast. Ocean Dyn. 2020, 70, 1151–1167. [Google Scholar] [CrossRef]
- Dolan, M.F.J.; Lucieer, V.L. Variation and Uncertainty in Bathymetric Slope Calculations Using Geographic Information Systems. Mar. Geod. 2014, 37, 187–219. [Google Scholar] [CrossRef]
- Lucieer, V.; Huang, Z.; Siwabessy, J. Analyzing Uncertainty in Multibeam Bathymetric Data and the Impact on Derived Seafloor Attributes. Mar. Geod. 2016, 39, 32–52. [Google Scholar] [CrossRef]
- Kagesten, G.; Fiorentino, D.; Baumgartner, F.; Zillen, L. How Do Continuous High-Resolution Models of Patchy Seabed Habitats Enhance Classification Schemes? Geosciences 2019, 9, 237. [Google Scholar] [CrossRef] [Green Version]
- Diesing, M.; Mitchell, P.J.; O’Keeffe, E.; Gavazzi, G.; Le Bas, T. Limitations of Predicting Substrate Classes on a Sedimentary Complex but Morphologically Simple Seabed. Remote Sens. 2020, 12, 3398. [Google Scholar] [CrossRef]
- Morales-Barquero, L.; Lyons, M.B.; Phinn, S.R.; Roelfsema, C.M. Trends in Remote Sensing Accuracy Assessment Approaches in the Context of Natural Resources. Remote Sens. 2019, 11, 2305. [Google Scholar] [CrossRef] [Green Version]
- Burrough, P.A.; van Gaans, P.F.M.; Hootsmans, R. Continuous classification in soil survey: Spatial correlation, confusion and boundaries. Geoderma 1997, 77, 115–135. [Google Scholar] [CrossRef]
- Pielou, E.C. Ecological Diversity; Wiley & Sons: New York, NY, USA, 1975. [Google Scholar]
- Fiorentino, D.; Lecours, V.; Brey, T. On the Art of Classification in Spatial Ecology: Fuzziness as an Alternative for Mapping Uncertainty. Front. Ecol. Evol. 2018, 6, 231. [Google Scholar] [CrossRef] [Green Version]
- Shannon, C.E. Communication in the presence of noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]
- Gonzalez-Mirelis, G.; Lindegarth, M. Predicting the distribution of out-of-reach biotopes with decision trees in a Swedish marine protected area. Ecol. Appl. 2012, 22, 2248–2264. [Google Scholar] [CrossRef]
- Hengl, T.; de Jesus, J.M.; Heuvelink, G.B.M.; Gonzalez, M.R.; Kilibarda, M.; Blagotic, A.; Shangguan, W.; Wright, M.N.; Geng, X.Y.; Bauer-Marschallinger, B.; et al. SoilGrids250m: Global gridded soil information based on machine learning. PLoS ONE 2017, 12, e0169748. [Google Scholar] [CrossRef] [Green Version]
- Rossiter, D.G.; Zeng, R.; Zhang, G.L. Accounting for taxonomic distance in accuracy assessment of soil class predictions. Geoderma 2017, 292, 118–127. [Google Scholar] [CrossRef] [Green Version]
- Zhu, A.X. Measuring uncertainty in class assignment for natural resource maps under fuzzy logic. Photogramm. Eng. Remote Sens. 1997, 63, 1195–1202. [Google Scholar]
- Prasad, M.S.G.; Arora, M.K. Representing Uncertainty in Fuzzy Land Cover Classification: A Comparative Assessment. J. Remote Sens. 2015, 3, 34–45. [Google Scholar]
- Mitchell, P.; Downie, A.; Diesing, M. How good is my map? A tool for semi-automated thematic mapping and spatially explicit confidence assessment. Environ. Model. Softw. 2018, 108, 111–122. [Google Scholar] [CrossRef]
- Lecours, V. On the Use of Maps and Models in Conservation and Resource Management (Warning: Results May Vary). Front. Mar. Sci. 2017, 4, 288. [Google Scholar] [CrossRef] [Green Version]
- Strong, J.A. An error analysis of marine habitat mapping methods and prioritised work packages required to reduce errors and improve consistency. Estuar. Coast. Shelf Sci. 2020, 240, 106684. [Google Scholar] [CrossRef]
- Meyer, H.; Pebesma, E. Predicting into unknown space? Estimating the area of applicability of spatial prediction models. arXiv 2020, arXiv:2005.07939. [Google Scholar]
- Rattray, A.; Ierodiaconou, D.; Monk, J.; Laurenson, L.J.B.; Kennedy, P. Quantification of Spatial and Thematic Uncertainty in the Application of Underwater Video for Benthic Habitat Mapping. Mar. Geod. 2014, 37, 315–336. [Google Scholar] [CrossRef]
- Greene, H.G.; Yoklavich, M.M.; Starr, R.M.; O’Connell, V.; Wakefield, W.W.; Sullivan, D.E.; McRea, J.E., Jr.; Cailliet, G.M. A classification scheme for deep seafloor habitats. Oceanol. Acta 1999, 22, 663–678. [Google Scholar] [CrossRef] [Green Version]
- Laberg, J.S.; Vorren, T.O. A late Pleistocene submarine slide on the Bear Island trough mouth fan. GeoMar. Lett. 1993, 13, 227–234. [Google Scholar] [CrossRef]
- King, E.L.; Bøe, R.; Bellec, V.K.; Rise, L.; Skarðhamar, J.; Ferre, B.; Dolan, M.F.J. Contour current driven continental slope-situated sandwaves with effects from secondary current processes on the Barents Sea margin offshore Norway. Mar. Geol. 2014, 353, 108–127. [Google Scholar] [CrossRef] [Green Version]
- Bøe, R.; Skarðhamar, J.; Rise, L.; Dolan, M.F.J.; Bellec, V.K.; Winsborrow, M.; Skagseth, O.; Knies, J.; King, E.L.; Walderhaug, O.; et al. Sandwaves and sand transport on the Barents Sea continental slope offshore northern Norway. Mar. Pet. Geol. 2015, 60, 34–53. [Google Scholar] [CrossRef]
- Skarðhamar, J.; Skagseth, O.; Albretsen, J. Diurnal tides on the Barents Sea continental slope. Deep Sea Res. Oceanogr. Res. Pap. 2015, 97, 40–51. [Google Scholar] [CrossRef] [Green Version]
- Bøe, R.; Bjarnadóttir, L.R.; Elvenes, S.; Dolan, M.; Bellec, V.; Thorsnes, T.; Lepland, A.; Longva, O. Revealing the secrets of Norway’s seafloor–geological mapping within the MAREANO programme and in coastal areas. Geol. Soc. Lond. Spec. Publ. 2020, 505. [Google Scholar] [CrossRef]
- Buhl-Mortensen, L.; Buhl-Mortensen, P.; Dolan, M.F.J.; Holte, B. The MAREANO programme–A full coverage mapping of the Norwegian off-shore benthic environment and fauna. Mar. Biol. Res. 2015, 11, 4–17. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Meyer, H.; Reudenbach, C.; Hengl, T.; Katurji, M.; Nauss, T. Improving performance of spatio-temporal machine learning models using forward feature selection and target-oriented validation. Environ. Model. Softw. 2018, 101, 1–9. [Google Scholar] [CrossRef]
- Misiuk, B.; Diesing, M.; Aitken, A.; Brown, C.J.; Edinger, E.N.; Bell, T. A Spatially Explicit Comparison of Quantitative and Categorical Modelling Approaches for Mapping Seabed Sediments Using Random Forest. Geosciences 2019, 9, 254. [Google Scholar] [CrossRef] [Green Version]
- Hao, T.X.; Elith, J.; Lahoz-Monfort, J.J.; Guillera-Arroita, G. Testing whether ensemble modelling is advantageous for maximising predictive performance of species distribution models. Ecography 2020, 43, 549–558. [Google Scholar] [CrossRef] [Green Version]
- Ploton, P.; Mortier, F.; Réjou-Méchain, M.; Barbier, N.; Picard, N.; Rossi, V.; Dormann, C.; Cornu, G.; Viennois, G.; Bayol, N.; et al. Spatial validation reveals poor predictive performance of large-scale ecological mapping models. Nat. Commun. 2020, 11, 4540. [Google Scholar] [CrossRef]
- Elith, J.; Kearney, M.; Phillips, S. The art of modelling range-shifting species. Methods Ecol. Evol. 2010, 1, 330–342. [Google Scholar] [CrossRef]
- Zurell, D.; Elith, J.; Schroder, B. Predicting to new environments: Tools for visualizing model behaviour and impacts on mapped distributions. Divers. Distrib. 2012, 18, 628–634. [Google Scholar] [CrossRef]
- Bellec, V.K.; Bøe, R.; Rise, L.; Lepland, A.; Thorsnes, T.; Bjarnadóttir, L.R. Seabed sediments (grain size) of Nordland VI, offshore north Norway. J. Maps 2017, 13, 608–620. [Google Scholar] [CrossRef] [Green Version]
- Bøe, R.; Elvenes, S.; Totland, O.; Olsen, H.; Lepland, A.; Thorsnes, T.; Dolan, M. Standard for Geological Seabed Mapping Offshore; NGU Report 2010.033; Geological Survey of Norway: Trondheim, Norway, 2010. [Google Scholar]
- Hijmans, R.J.; van Etten, J. Raster: Geographic Data Analysis and Modeling. R Package Version 3.3–7. Available online: https://CRAN.R-project.org/package=raster (accessed on 11 December 2020).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]
- Meyer, H.; Reudenbach, C.; Wollauer, S.; Nauss, T. Importance of spatial predictor variable selection in machine learning applications–Moving from data reproduction to spatial prediction. Ecol. Model. 2019, 411, 108815. [Google Scholar] [CrossRef] [Green Version]
- Hengl, T.; Nussbaum, M.; Wright, M.N.; Heuvelink, G.B.M.; Graler, B. Random forest as a generic framework for predictive modeling of spatial and spatio-temporal variables. PeerJ 2018, 6, e5518. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lien, V.S.; Gusdal, Y.; Vikebo, F.B. Along-shelf hydrographic anomalies in the Nordic Seas (1960–2011): Locally generated or advective signals? Ocean Dyn. 2014, 64, 1047–1059. [Google Scholar] [CrossRef] [Green Version]
- Lien, V.S.; Gusdal, Y.; Albretsen, J.; Melsom, A.; Vikebø, F.B. Evaluation of A Nordic Seas 4 Km Numerical Ocean Model Archive (SVIM), 1960–2011; Institute of Marine Research: Bergen, Norway, 2013; p. 79. [Google Scholar]
- Wright, M.N.; Ziegler, A. Ranger: A Fast Implementation of Random Forests for High Dimensional Data in C plus plus and R. J. Stat. Softw. 2017, 77, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Kuhn, M. Caret: Classification and Regression Training. R Package Version 6.0–86. Available online: https://CRAN.R-project.org/package=caret (accessed on 11 December 2020).
- Meyer, H. CAST: ‘Caret’ Applications for Spatial-Temporal Models. R Package Version 0.4.2. Available online: https://CRAN.R-project.org/package=CAST (accessed on 11 December 2020).
- Brodersen, K.H.; Ong, C.S.; Stephan, K.E.; Buhmann, J.M. The balanced accuracy and its posterior distribution. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 3121–3124. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Lucieer, V.; Lucieer, A. Fuzzy clustering for seafloor classification. Mar. Geol. 2009, 264, 230–241. [Google Scholar] [CrossRef]
- Ismail, K.; Huvenne, V.A.I.; Masson, D.G. Objective automated classification technique for marine landscape mapping in submarine canyons. Mar. Geol. 2015, 362, 17–32. [Google Scholar] [CrossRef] [Green Version]
- Kempen, B.; Brus, D.J.; Heuvelink, G.B.M.; Stoorvogel, J.J. Updating the 1:50,000 Dutch soil map using legacy soil data: A multinomial logistic regression approach. Geoderma 2009, 151, 311–326. [Google Scholar] [CrossRef]
- Tobler, W. Resolution, resampling, and all that. Build. Databases Glob. Sci. 1988, 12, 9–137. [Google Scholar]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef] [Green Version]
- Van Son, T.C.; Nikolioudakis, N.; Steen, H.; Albretsen, J.; Furevik, B.R.; Elvenes, S.; Moy, F.; Norderhaug, K.M. Achieving Reliable Estimates of the Spatial Distribution of Kelp Biomass. Front. Mar. Sci. 2020, 7, 107. [Google Scholar] [CrossRef] [Green Version]
- Stevens, D.L.; Olsen, A.R. Spatially balanced sampling of natural resources. J. Am. Stat. Assoc. 2004, 99, 262–278. [Google Scholar] [CrossRef]
- Van Son, T.C.; Bjarnadóttir, L.R.; Thorsnes, T.; Gonzales-Mirelis, G.; Dolan, M.; Buhl-Mortensen, P. Environmental Variability Index (EVI)-A MAREANO Methods Study for Guidance Of Sampling Effort; NGU-Rapport (2015.027); Geological Survey of Norway: Trondheim, Norway, 2015. [Google Scholar]
- Kuhn, M.; Johnson, K. Applied Predictive Modeling; Springer: Berlin/Heidelberg, Germany, 2013; Volume 26. [Google Scholar]
- Gonzalez-Mirelis, G.; Bergstrom, P.; Lindegarth, M. Interaction between classification detail and prediction of community types: Implications for predictive modelling of benthic biotopes. Mar. Ecol. Prog. Ser. 2011, 432, 31–44. [Google Scholar] [CrossRef] [Green Version]
- Galparsoro, I.; Connor, D.W.; Borja, A.; Aish, A.; Amorim, P.; Bajjouk, T.; Chambers, C.; Coggan, R.; Dirberg, G.; Ellwood, H.; et al. Using EUNIS habitat classification for benthic mapping in European seas: Present concerns and future needs. Mar. Pollut. Bull. 2012, 64, 2630–2638. [Google Scholar] [CrossRef] [Green Version]
- Halvorsen, R. Medarbeidere Og Samarbeidspartnere. NiN – Typeinndeling Og Beskrivelsessystem for Natursystemnivaet—Natur i Norge, Artikkel 3 (Versjon 2.1.0). 2016, pp. 1–528. Available online: https://artsdatabanken.no/Files/14539/Artikkel_3___Natursystemniv_et___typeinndeling_og_beskrivelsessystem_(versjon_2.1.0).pdf (accessed on 11 December 2020).
- Federal Geographic Data Committee. FGDC-STD-018–2012: Coastal and Marine Ecological Classification Standard; FGDC: Reston, VA, USA, 2012. [Google Scholar]
- Hattermann, T.; Isachsen, P.E.; von Appen, W.J.; Albretsen, J.; Sundfjord, A. Eddy-driven recirculation of Atlantic Water in Fram Strait. Geophys. Res. Lett. 2016, 43, 3406–3414. [Google Scholar] [CrossRef] [Green Version]












| Variables | HDM | ||||
|---|---|---|---|---|---|
| Base | N4k | B | SW | ||
| Common variables | Bathymetry | 5–10 m floating point geotiff (resampled to 200 m) | |||
| Easting (X), Northing (Y) | 200 m | ||||
| Sediment class | 1:100,000 polygon (resampled to 200 m) | ||||
| Oceanographic variables | Temperature (Maximum, Minimum, Mean *) | n/a | 4 km Surface optimised floating point geotiff (resampled to 200 m) | 800 m Surface optimised floating point geotiff (resampled to 200 m) | 800 m Bottom optimised floating point geotiff (resampled to 200 m) |
| Salinity (Maximum, Minimum, Mean) | |||||
| Current Speed (Maximum, Mean) | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dolan, M.F.J.; Ross, R.E.; Albretsen, J.; Skarðhamar, J.; Gonzalez-Mirelis, G.; Bellec, V.K.; Buhl-Mortensen, P.; Bjarnadóttir, L.R. Using Spatial Validity and Uncertainty Metrics to Determine the Relative Suitability of Alternative Suites of Oceanographic Data for Seabed Biotope Prediction. A Case Study from the Barents Sea, Norway. Geosciences 2021, 11, 48. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences11020048
Dolan MFJ, Ross RE, Albretsen J, Skarðhamar J, Gonzalez-Mirelis G, Bellec VK, Buhl-Mortensen P, Bjarnadóttir LR. Using Spatial Validity and Uncertainty Metrics to Determine the Relative Suitability of Alternative Suites of Oceanographic Data for Seabed Biotope Prediction. A Case Study from the Barents Sea, Norway. Geosciences. 2021; 11(2):48. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences11020048
Chicago/Turabian StyleDolan, Margaret F.J., Rebecca E. Ross, Jon Albretsen, Jofrid Skarðhamar, Genoveva Gonzalez-Mirelis, Valérie K. Bellec, Pål Buhl-Mortensen, and Lilja R. Bjarnadóttir. 2021. "Using Spatial Validity and Uncertainty Metrics to Determine the Relative Suitability of Alternative Suites of Oceanographic Data for Seabed Biotope Prediction. A Case Study from the Barents Sea, Norway" Geosciences 11, no. 2: 48. https://0-doi-org.brum.beds.ac.uk/10.3390/geosciences11020048