2.1. Overview of Past Studies
In the multiple shear mechanism model, a circle placed in three-dimensional space and its center point are considered. In this model, the center point and all the points on the circumference are each connected by a nonlinear spring, and the sum of the force and displacement of the nonlinear spring represent the stress and strain, respectively, at the center point. Each nonlinear spring’s displacement-force relationship follows hyperbolic function, and its displacement and force correspond to its shear strain component and shear stress component in the direction of the spring. The multiple shear mechanism model was originally developed for a 2D model, which uses a circle created on a plane, and this model has already been extended to a 3D model by considering the various planes in three-dimensional space (the original model).
Many numerical simulations have been performed against past earthquake disasters and ex situ experiments using the original model [
10,
11,
12]. This model expresses the anisotropy of the mechanical properties of soil, which is generated by rotation of the principle stress axis. This model is the most popular constitutive relationship model for practical design work in Japan because this model accurately reproduces actual soil dynamic behavior using several soil parameters.
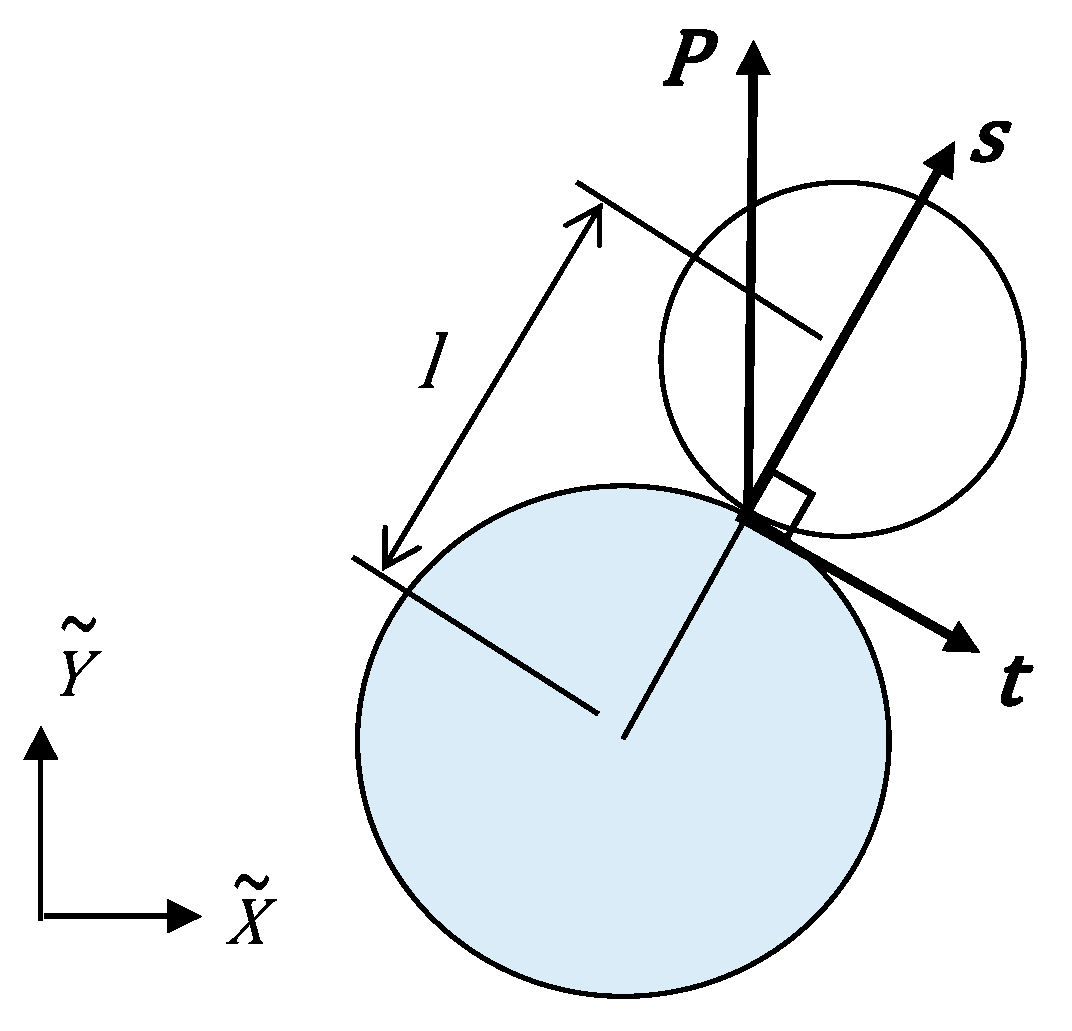
Figure 1 shows the concept of the multiple shear mechanism model, which is based on the granular material. This contact force
shown in this figure is expressed by the following equation in the concept
where
is the normal vector of the contact surface of the granular material,
is the tangential vector, and
and
are forces acting on the contact surface in the respective directions. The macroscopic stress is determined by the average of the contact forces within a representative volume element with volume
, as written in Equation (2), where
represents the distance between the particle centers on each contact surface.
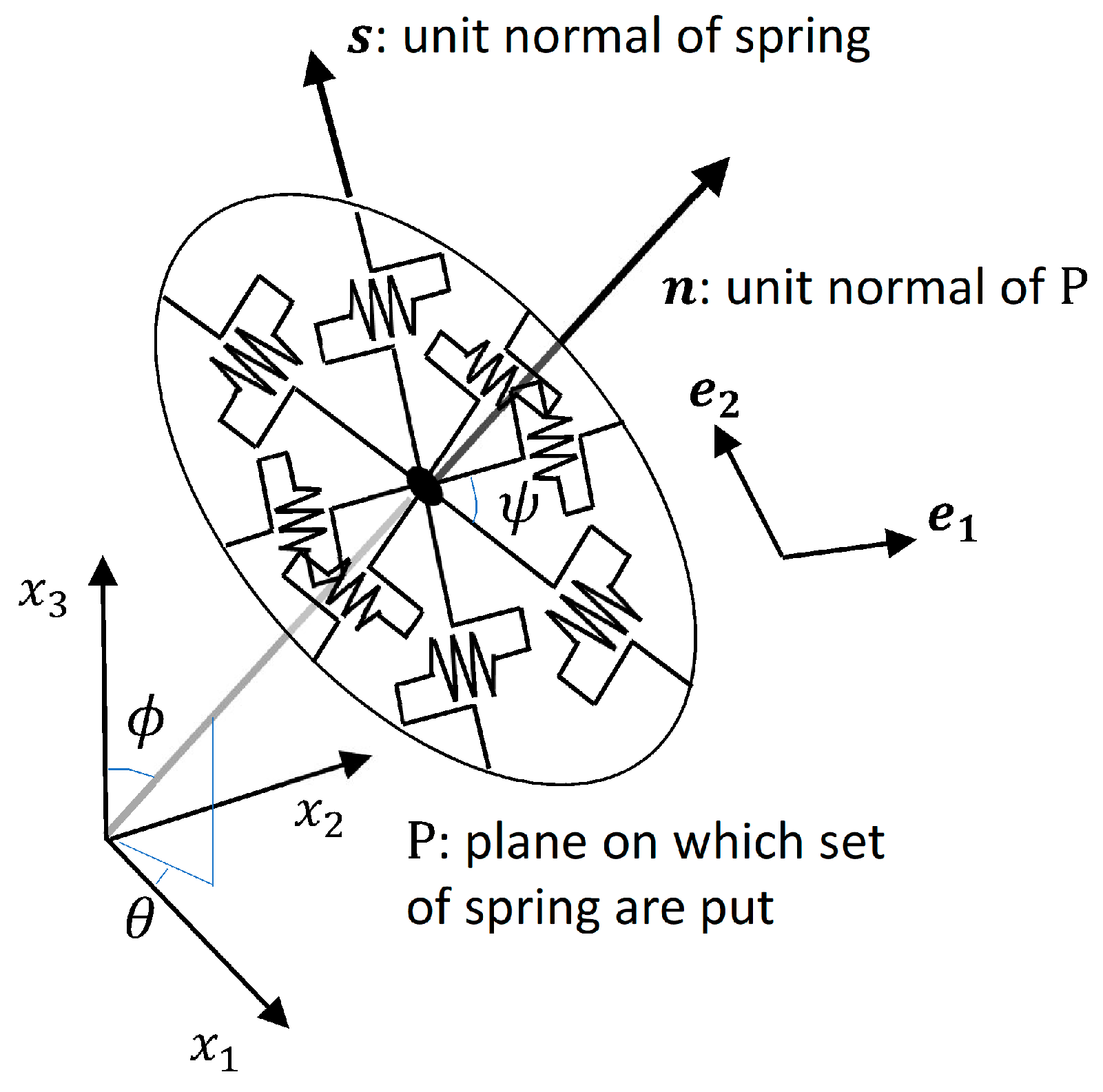
The schematic view of the original model is shown in
Figure 2. Given a plane
with a unit normal vector
, a circle is placed over it and a spring is placed in the direction of unit normal vector
. The shearing direction of this spring on the plane
is
. Assuming
to be the shear stress component generated by the spring, it contributes
to the stress tensor. Using unit vectors
and
, which are orthogonal in plane
,
can be expressed as
. The contribution of all nonlinear springs in the plane
is
When the strain tensor is
ε, the shear strain component in the
direction on the plane is expressed by the following equation
Let
be a hyperbolic function, and then the stress–strain relationship of each spring can be expressed by the equation
When the unit normal vector of the circle
is a three-dimensional vector and this vector component is expressed as
, the springs of all planes generate the following stress tensor
.
The contribution of isotropic pressure is excluded from Equation (6). Since is calculated by using the right-hand side of Equations (4) and (5), Equation (6) becomes the symmetric tensor.
By setting Equation (6) to the incremental form, the following equation can be derived
where
is the strain tensor of the isotropic component and
is the fourth-order tensor of
where
is the derivative of the hyperbolic function
and
corresponds to a nonlinear constitutive relation tensor.
The right-hand sides of Equations (6) and (8) use a triple integral using three variables
. In particular, in order to calculate Equation (8), the parameters of hyperbolic function
[
7] must be set corresponding to the three variables. To execute this triple integration accurately, an enormous amount of memory is required. In order to implement the original model for FEM, it is necessary to store the parameters related to the hyperbolic function of all the springs in order to create the overall stiffness matrix, which requires enormous amounts of memory.
2.2. Concept of the Proposed Model
As shown in [
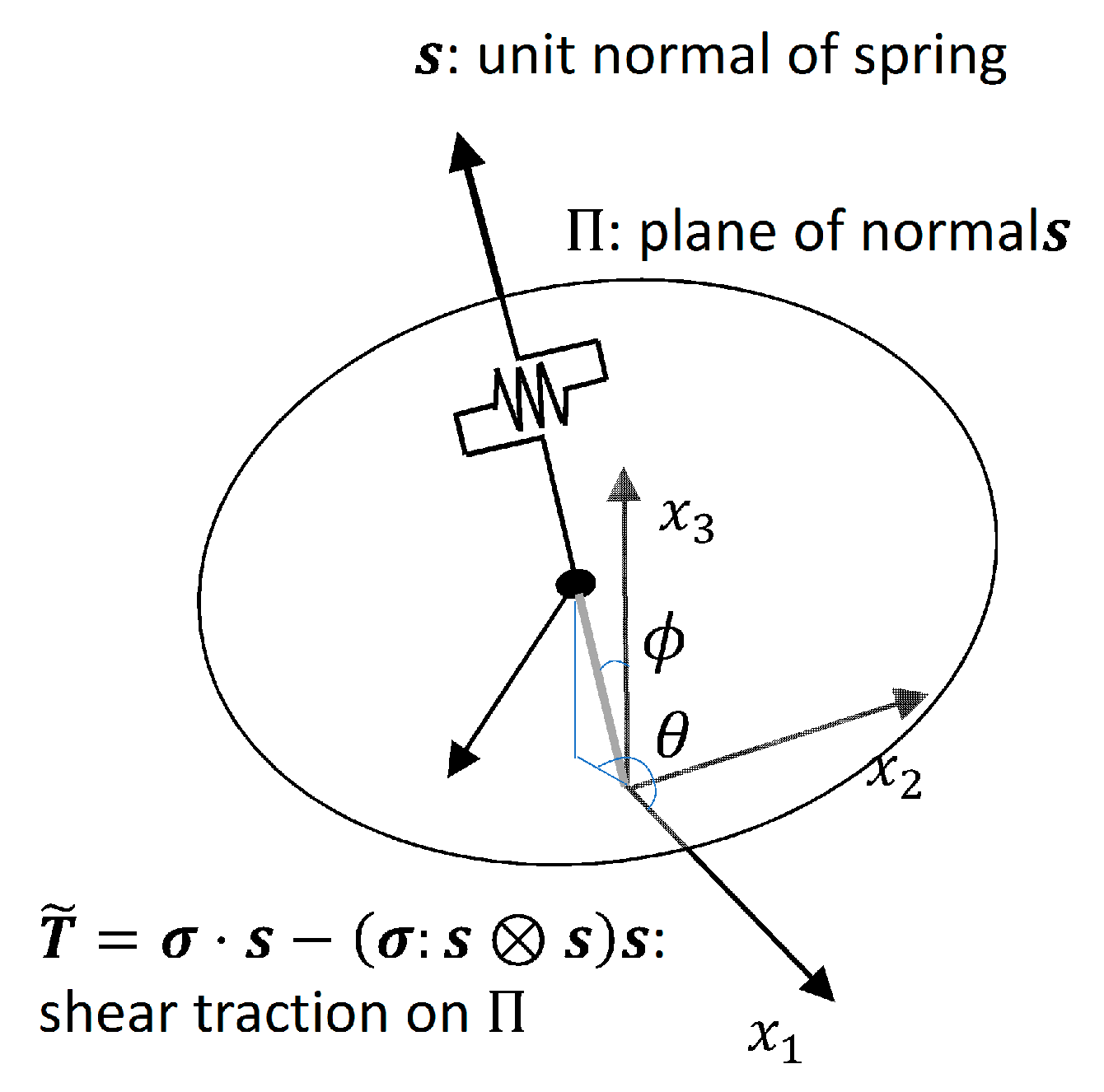
13], we develop an alternative formulation (the proposed model) suitable for large-scale three-dimensional FEM based on the multiple shear mechanism model. The concept of the proposed model is shown in
Figure 3. In the proposed model, every spring is handled as being connected to the origin in three-dimensional space, and
in
Figure 3 is a unit normal vector whose direction is orthogonal to plane
(as a plane that is orthogonal to the spring direction
and is used to compute shear traction). If the stress tensor at the origin is
, the traction acting on
can be expressed as
. Since the axis component of this traction is
, which is a scalar value, the shear traction on
is the following vector.
Let the normal vector to the direction of be expressed by and then we can represent the shear component of as .
It is possible to calculate scalar
, which is the shear strain component in the direction of
the plane
from strain tensor
. We assumed that
and
satisfy the following equation with the hyperbolic function
Therefore, when
is expressed as
, the stress tensor can be expressed by the following integration for all springs
where the contribution of isotropic pressure
is excluded.
The stress tensor in the incremental formulation can also be expressed by the equation
where
Similar to in Equation (8), in Equation (13) corresponds to a nonlinear constitutive relation tensor. The fourth-order tensor represented by Equation (13) (the proposed model) and Equation (8) (the original model) is different in that Equation (13) is a double integral and Equation (8) is a triple integral.
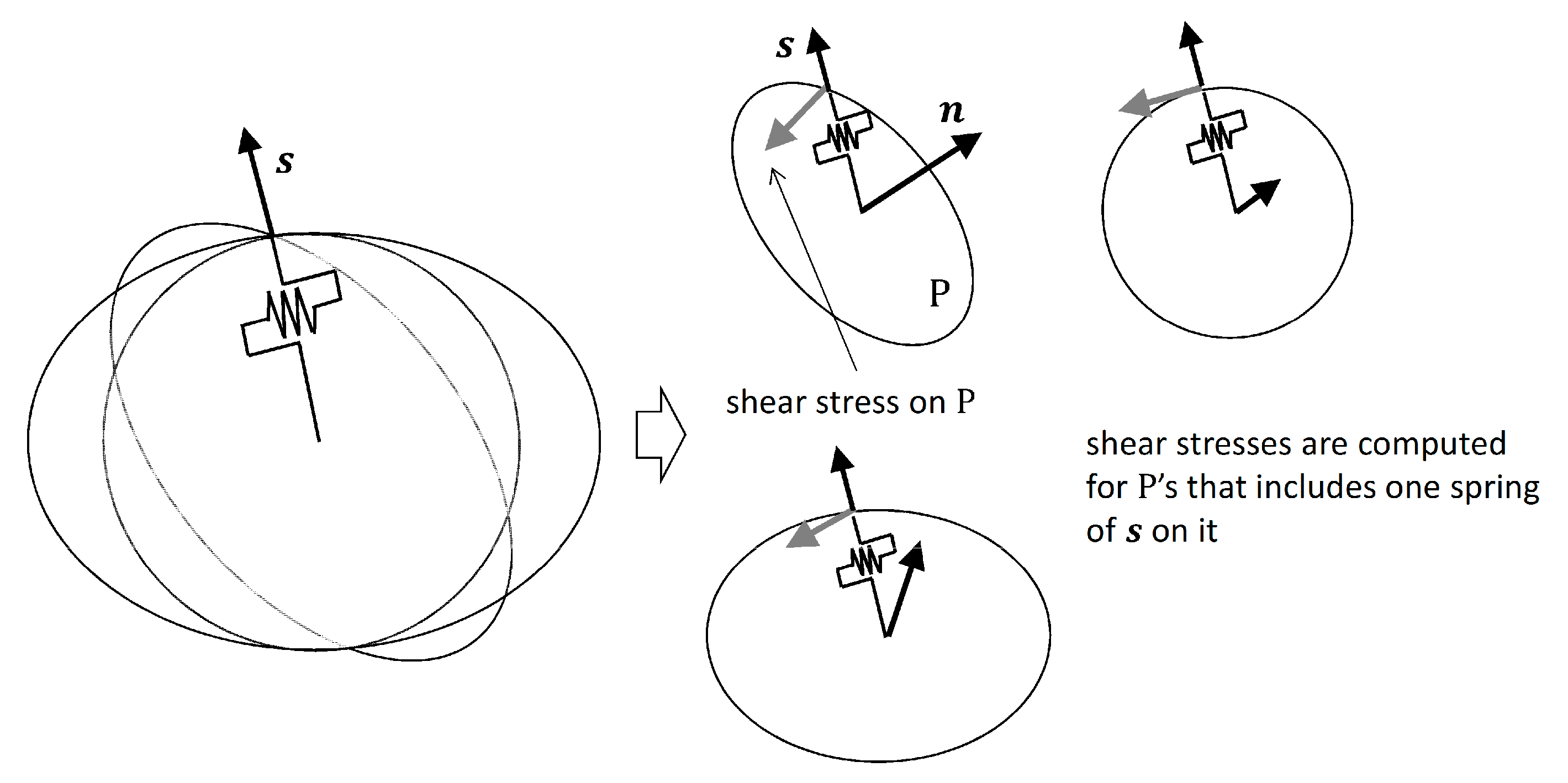
Figure 4 shows a schematic view of the spring treatment used in the original model. In the original model, plane
is first set in three-dimensional space. Next, a plurality of springs is set on plane
. Since the plane
P is firstly determined in the original model, the spring in the
direction is used in all planes
P, which have
. In the proposed model, a spring in an arbitrary direction is first set in three-dimensional space, and a plane
perpendicular to the direction is defined. Therefore, in the proposed model, a spring in any direction is used only once. As a result, the triple integral of Equation (8) can be contracted to the double integral of Equation (13).
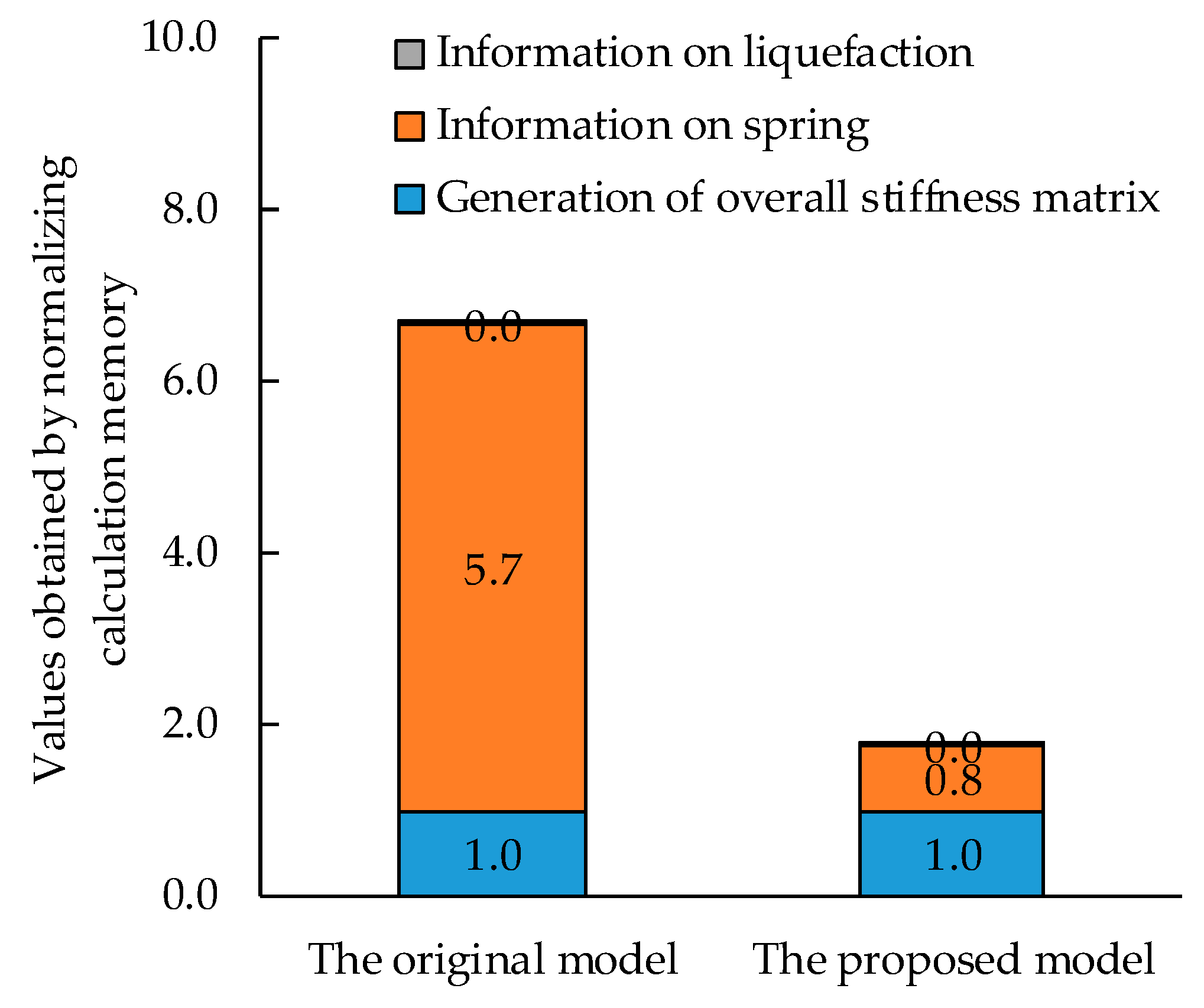
From a numerical analysis viewpoint, it is important to contract triple integration to double integration to reduce the amount of memory. In the case where there are triple integral variables and double integral variables springs in Equation (8) and springs in Equation (13) are considered. Also, the required memory for storing the hyperbolic function parameters of each spring increases with the number of springs.
There are multiple springs in the
direction in the original model and the resultant force of the shear stress components of these springs is theoretically equivalent to those of the proposed model in the
direction. The direction of the shear stress component vector
, which is generated in the direction of
, sequentially changes on plane
. That is, the direction
of
varies with every time step. Therefore,
calculated from
is used in Equation (13) and
is the shear strain component calculated by the following equation using time-invariant
and time-variant
The major differences between the original model and the proposed model are as follows. In the original model, the total stiffness matrix is calculated based on the shear strain generated in each spring having a predetermined direction. In the proposed model, the total stiffness matrix is calculated based on the maximum shear strain component generated on a certain plane. Therefore, in situations where the stress field suddenly changes from place to place, the original model may miss the maximum shear strain component occurring on the planes, and so there is a possibility of overestimating the overall stiffness matrix.
2.3. Verification of the Proposed Model
To use the proposed model for practical design work, it is important to show that the proposed model is capable of simulating the response as well as the original model. Furthermore, it is necessary to show that the accuracy can be secured without significantly increasing the total number of springs when the mechanical characteristics of adjacent springs do not change abruptly in the proposed model. In this section, we verify the validity of the proposed model by comparing the responses simulated by the proposed model with the original model by the case of using a single solid element.
First, we performed a numerical simulation against cyclic simple shear loading using the finite element total stress analysis method with a single solid element. The input property values used in this study were determined using the method proposed by Morita et al. [
14] for sand whose equivalent SPT N value is 10. The loading condition was simple shearing with the maximum shear stress being 30 kPa. The number of planes
P and springs on plane
P of the original model were changed in this numerical simulation in order to confirm the influence on the response value. Similarly, the number of springs in the proposed model was also changed. For the integration of Equations (8) and (13), the discrete-ordinate method (Sn method) [
15], which is known as a method for integrating solid angle with high accuracy, was used. Each spring was installed symmetrically in three-dimensional space in order to reduce the amount of memory for both the original and the proposed model.
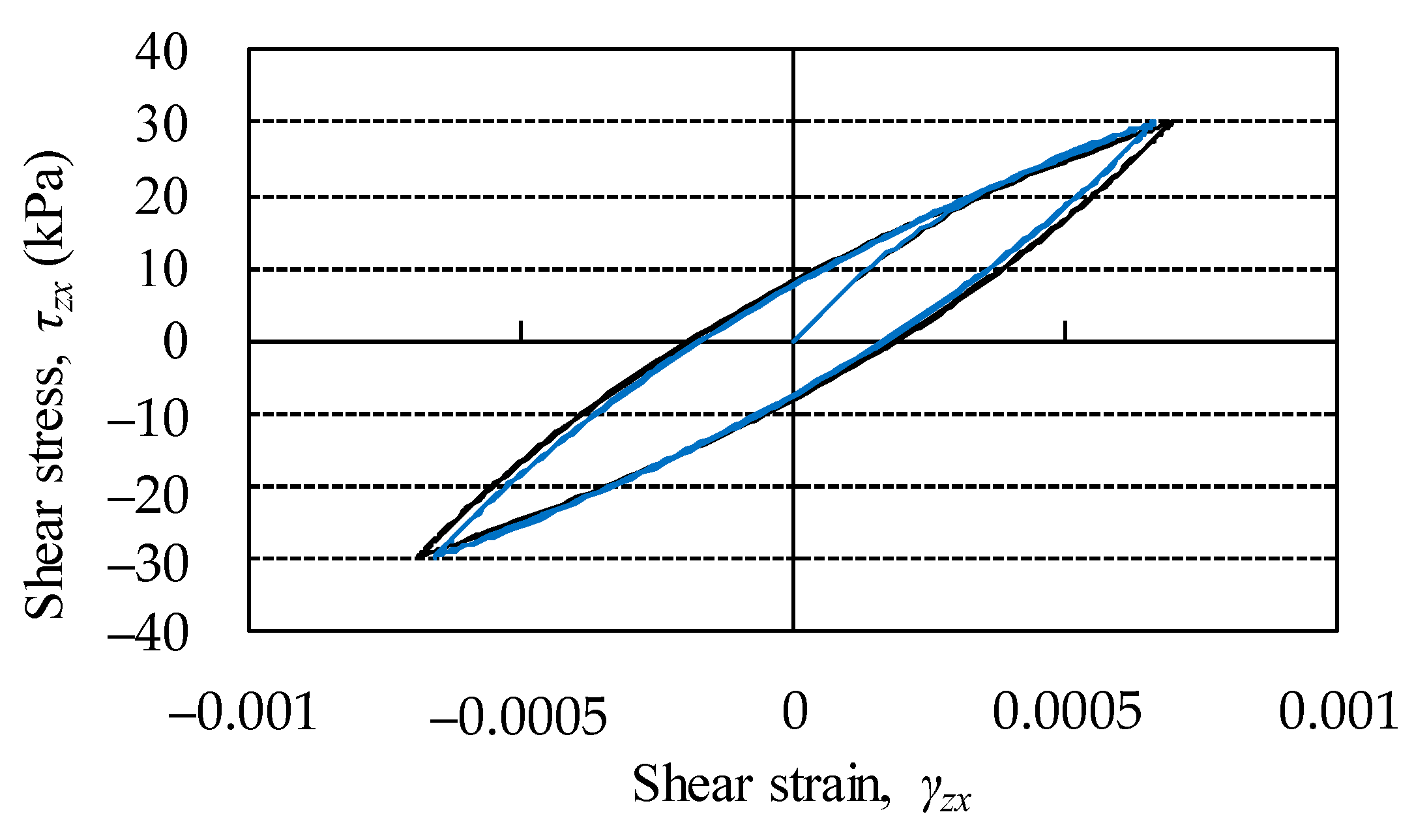
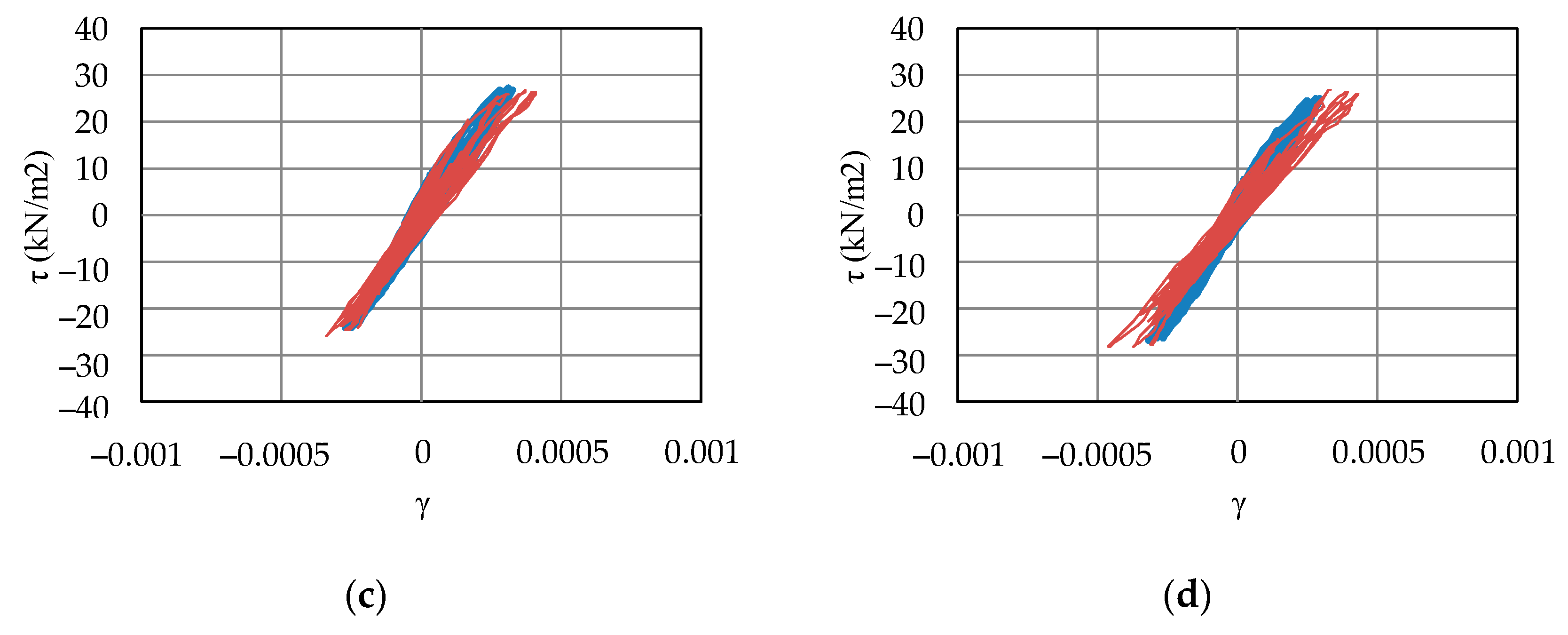
The comparison between the shear stress–shear strain relation of the original model and the proposed model is shown in
Figure 5. In this simulation, the number of planes
in the original model was 144 per hemisphere and the number of springs on the plane
was 12 per semicircle (total number of springs was 1728). The number of springs of the proposed model was set to 144 per hemisphere. In the proposed model, despite using only 1/12th of the springs of the original model, a highly consistent result with less than 5% relative error compared to the original model was obtained.
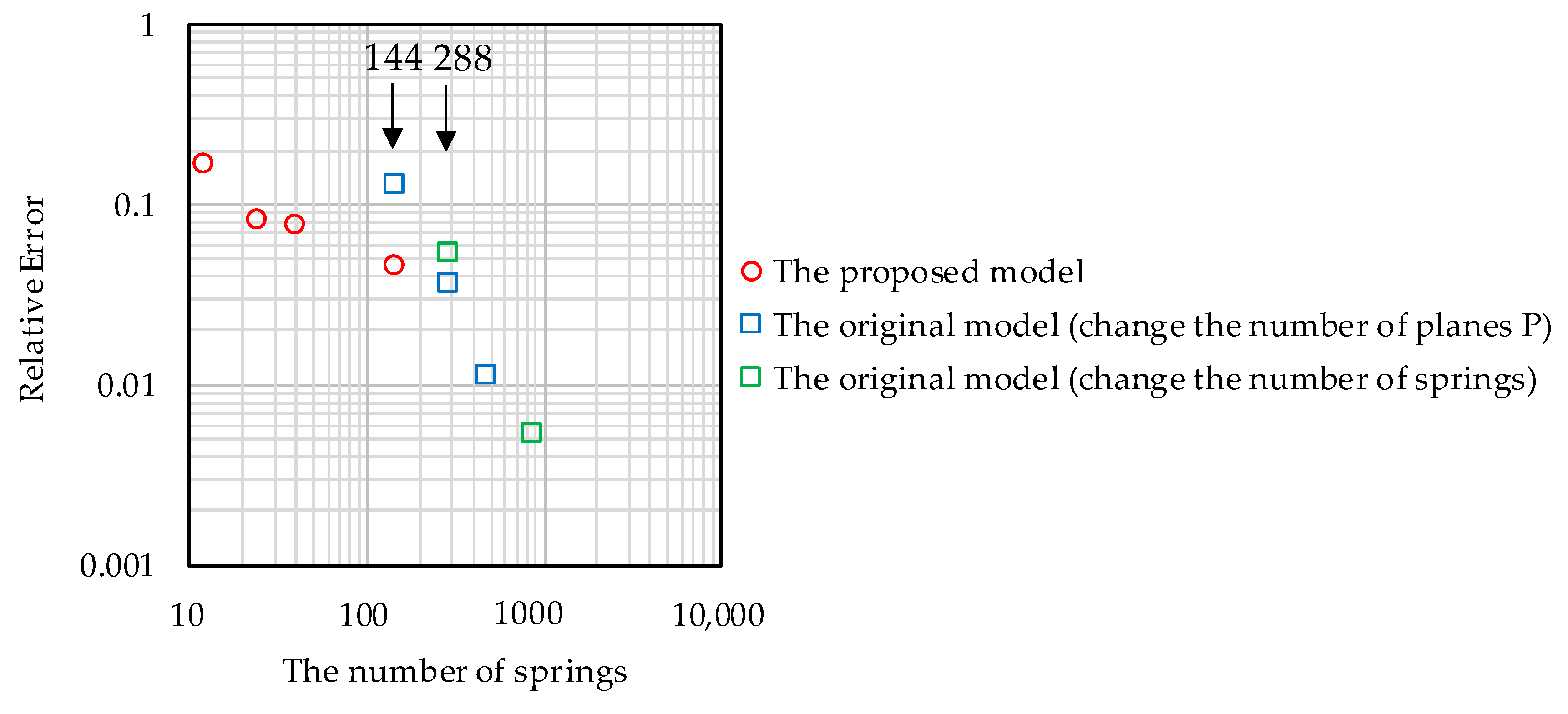
Figure 6 shows the relative error when changing the number of springs. For the original model, the number of planes
and the number of springs on plane
were changed separately. The relative error is calculated by the equation
When calculating this relative error, the value of , when the load was 30 kPa, was used in every case. Here, is set as the value obtained in the case where the number of planes is 144 per hemisphere and the number of springs on the plane is 12 per semicircle in the original model.
As shown in
Figure 6, the relative error decreased as the number of springs increased in both models. When the total number of springs was the same in both models, the relative error was smaller in the proposed model than in the original model, as indicated in the previous section. Focusing on the plots given the same degree of relative error in
Figure 6, we found that the number of springs of the original model was 288 and the number of springs of the proposed model was 144. That is, in this example, the simulation cost of the proposed model with the same relative error is only about one-half that of the original model. This indicates that the proposed model has an extremely high ability to execute soil non-linear analysis targeting large-scale three-dimensional problems.
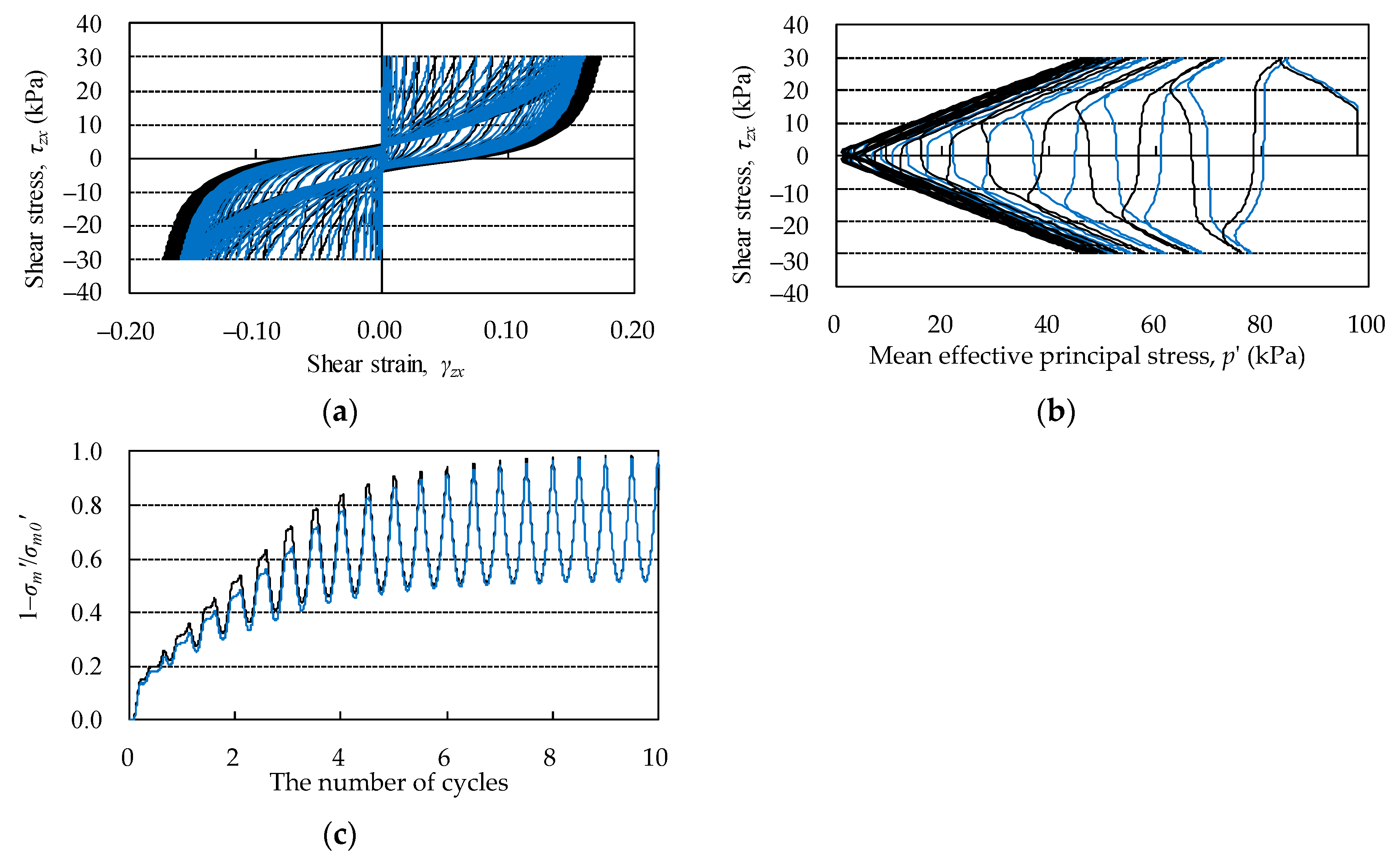
Next, we analyzed the effective stress of both the original and the proposed models to determine the effect of increasing the excess pore water pressure. The input property values and boundary conditions were the same as during the cyclic simple shear test (total stress analysis). The number of planes of the original model was 144 per hemisphere and the number of springs on the plane was 12 per semicircle. As for the proposed model, the number of total springs was set to 144 per hemisphere.
A comparison of responses obtained by both models is shown in
Figure 7. We found that there was little difference among the shear stress–shear strain relation, mean effective principal stress path, and excess pore water pressure ratio obtained by both models. The reason for this finding is due to the fact that the original model tends to overestimate the overall stiffness matrix. Although slight differences in responses were found between both models, it does not cause any problems from the viewpoint of practical designing work.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}