
Coupled Bionic Design Based on Primnoa Mouthpart to Improve the Performance of a Straw Returning Machine


Abstract
:1. Introduction
2. Materials and Methods
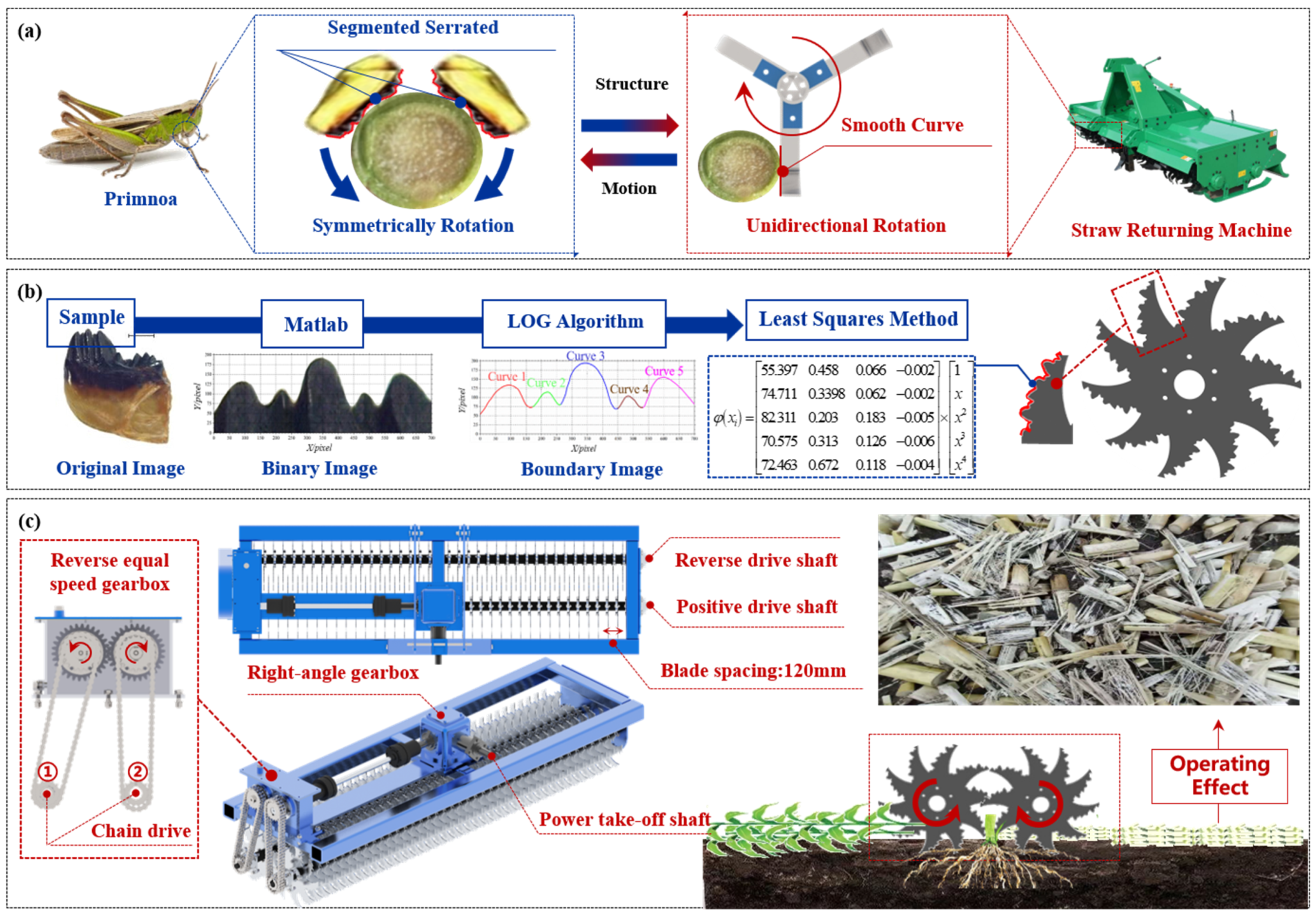
2.1. Bionic Coupling Element Selection and Coupled Bionic Design
2.2. Parameter Optimization Experiment of Bionic Straw Returning Machine Based on EDEM2018
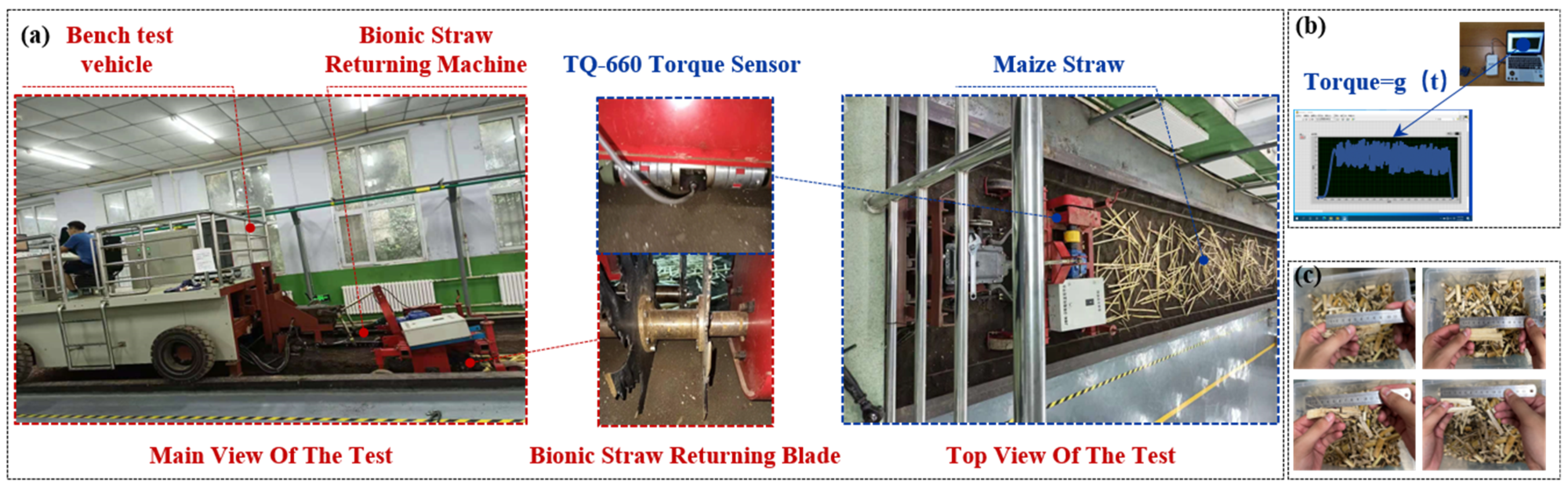
2.3. Bionic Straw Returning Machine Operational Performance Test
2.4. Test Data Statistics
3. Results
3.1. Parameter Optimization Test Results
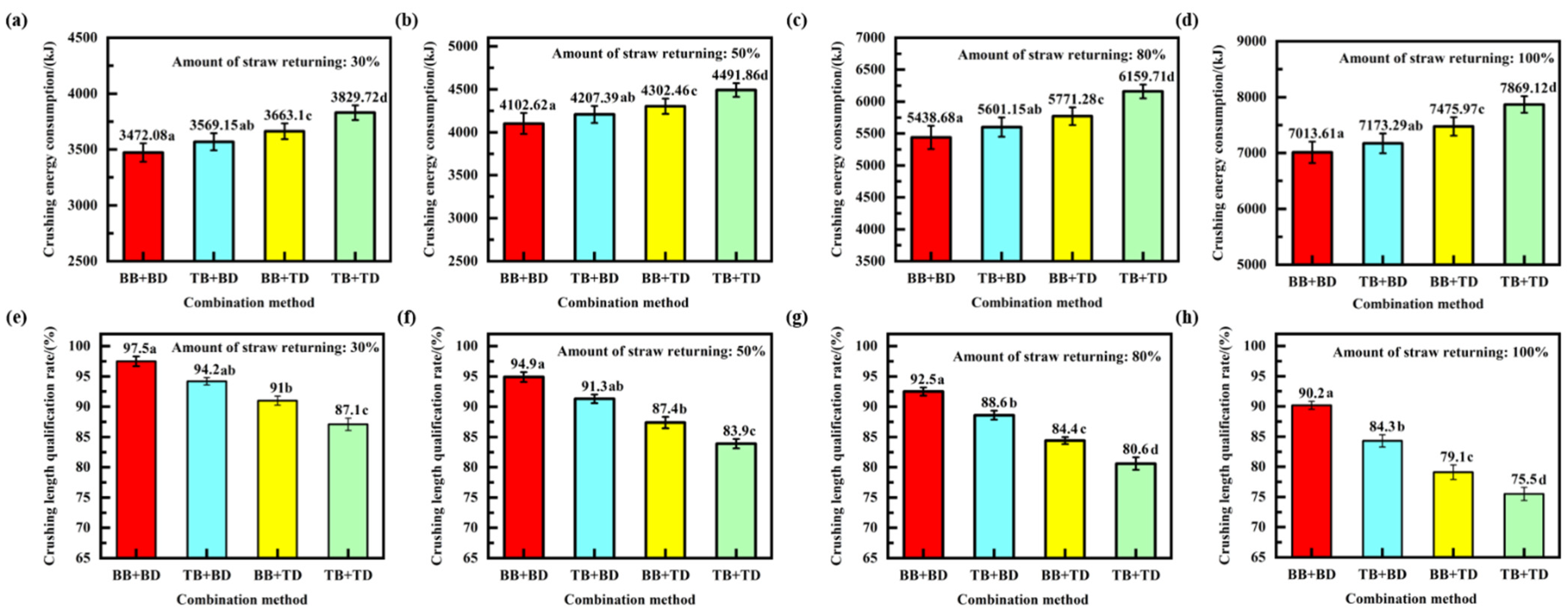
3.2. Performance Verification Test Results of Bionic Straw Returning Machine
4. Discussion
4.1. Discussion on the Law of Influence of Design Parameters on Operational Performance
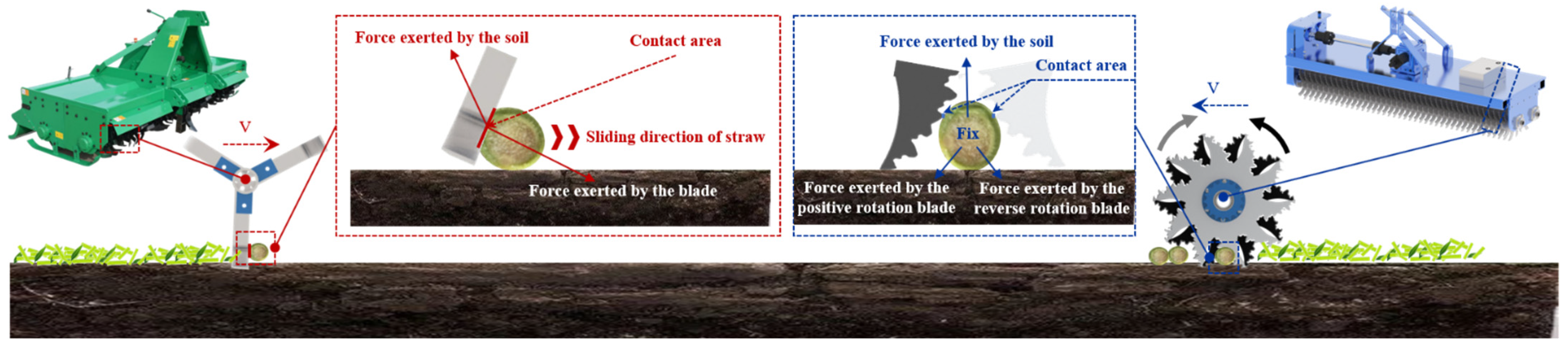
4.2. A Discussion on the Impact of Bionic Design on Operational Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sun, B.J.; Jia, S.X.; Zhang, S.X.; McLaughlin, N.; Zhang, X.P.; Liang, A.Z.; Chen, X.W.; Wei, S.C.; Liu, S.Y. Tillage, seasonal and depths effects on soil microbial properties in black soil of Northeast China. Soil Till. Res. 2016, 155, 421–428. [Google Scholar] [CrossRef]
- Zhang, S.X.; Chen, X.W.; Jia, S.X.; Liang, A.Z.; Zhang, X.P.; Yang, X.M.; Wei, S.C.; Sun, B.J.; Huang, D.D.; Zhou, G.Y. The potential mechanism of long-term conservation tillage effects on maize yield in the black soil of Northeast China. Soil Till. Res. 2015, 154, 84–90. [Google Scholar] [CrossRef]
- Liang, A.Z.; Yang, X.M.; Zhang, X.P.; Chen, X.W.; Mclaughlin, N.B.; Wei, S.C.; Zhang, Y.; Jia, S.X.; Zhang, S.X. Changes in soil organic carbon stocks under 10-year conservation tillage on a Black soil in Northeast China. J. Agr. Sci. 2016, 154, 1425–1436. [Google Scholar] [CrossRef]
- Feng, H.Y.; Li, Q.Y.; Sun, L.Y.; Cai, Q.G. Using Cs-137 to study spatial patterns of soil ero-sion and soil organic carbon (SOC) in an agricultural catchment of the typical black soil region, Northeast China. J. Environ. Radioact. 2012, 112, 125–132. [Google Scholar] [CrossRef]
- Li, H.Q.; Yao, Y.F.; Zhang, X.J.; Zhu, H.S.; Wei, X.R. Changes in soil physical and hydraulic properties following the conversion of forest to cropland in the black soil region of North-east China. CATENA 2021, 198, 104986. [Google Scholar] [CrossRef]
- Wang, J.W.; Tang, H.; Wang, J.F. Comprehensive Utilization Status and Development Analysis of Crop Straw Resource in Northeast China. Trans. CSAM 2017, 48, 1–21. [Google Scholar]
- Cheng, S.L.; Fang, H.J.; Zhu, T.H.; Zheng, J.J.; Yang, X.M.; Zhang, X.P.; Yu, G.R. Effects of soil erosion and deposition on soil organic carbon dynamics at a sloping field in Black Soil region, North-east China. Soil Sci. Plant Nutr. 2012, 56, 521–529. [Google Scholar] [CrossRef]
- Zhao, J.L.; Lu, Y.; Tian, H.L.; Jia, H.L.; Guo, M.Z. Effects of Straw Returning and Residue Cleaner on the Soil Moisture Content, Soil Temperature, and Maize Emergence Rate in China’s Three Major Maize Producing Areas. Sustainability 2019, 11, 5796. [Google Scholar] [CrossRef] [Green Version]
- Horning, L.B.; Strtler, L.D.; Saxton, K.E. Surface residue and soil toughness for wind ero-sion protection. Trans. ASAE 1998, 41, 1061–1065. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Zhang, J.M.; Xia, J.F.; Tahir, H.M.; Zhu, Y.H.; Zhang, C.L. Effects of subsoiling on working quality and total power consumption for high stubble straw returning machine. Int. J. Agric. Biol. Eng. 2019, 12, 56–62. [Google Scholar] [CrossRef]
- Bao, X.B.; Zhao, X.Y.; He, J.; Li, H.W.; Wang, Q.J.; Liu, W.Z. Design and performance test of plowing and rotaty tillage combined machine. INMATEH Agric. Eng. 2019, 58, 213–222. [Google Scholar]
- Wang, W.W.; Li, J.C.; Chen, L.Q.; Qi, H.J.; Liang, X.T. Effects of key parameters of straw chopping device on qualified rate, non-uniformity and power consumption. Int. J. Agric. Biol. Eng. 2018, 11, 122–128. [Google Scholar] [CrossRef]
- Yin, X.G.; Olesen, J.E.; Wang, M.; Ozturk, I.; Chen, F. Climate effects on crop yields in the Northeast Farming Region of China during 1961–2010. J. Agr. Sci. 2016, 154, 1190–1208. [Google Scholar] [CrossRef]
- Zhang, T.; Zhao, M.Q.; Liu, F.; Tian, H.Q.; Wulan, T.Y.; Yue, Y.; Li, D.P. A Discrete Element Method Model of Corn Stalk and Its Mechanical Characteristic Parameters. Bioresources 2020, 15, 9337–9350. [Google Scholar] [CrossRef]
- Liao, N.; Han, L.J.; Huang, G.Q.; Chen, L.J.; He, C. Effects of moisture content and compression frequency on straw open compression energy consumption. Trans. CSAE 2011, 27 (Suppl. S1), 318–322, (In Chinese with English Abstract). [Google Scholar]
- Yu, C.Y.; Liu, J.; Zhang, J.; Xue, K.; Zhang, S.; Liao, J.; Tai, Q.L.; Zhu, D.Q. Design and opti-mization and experimental verification of a segmented double-helix blade roller for straw returning cultivators. J. Chin. Inst. Eng. 2021, 44, 379–387. [Google Scholar] [CrossRef]
- Zheng, Z.Q.; He, J.; Li, H.W.; Diao, P.S.; Wang, Q.J.; Zhang, X.C. Design and Experiment of Straw-chopping Device with Choppingand Fixed Knife Supported Slide Cutting. Trans. CSAM 2016, 47, 108–116. [Google Scholar]
- Shen, Y.; Zhang, T.; Cui, J.; Chen, S.; Han, H.; Ning, T. Subsoiling increases aggre-gate-associated organic carbon, dry matter, and maize yield on the North China Plain. PeerJ 2021, 9, e11099. [Google Scholar] [CrossRef]
- Zhang, C. Study on the Dynamic of Soil Organic Carbon Accumulation and Maize Pro-Duction in Long Term Straw Returning. Master’s Thesis, Gansu Agricultural University, Lanzhou, China, 2017. [Google Scholar]
- Ren, L.Q.; Liang, Y.H. Biological couplings: Classification and characteristic rules. Sci. China Ser. E Technol. Sci. 2009, 52, 2791–2800. [Google Scholar] [CrossRef]
- Zhao, J.L.; Guo, M.Z.; Lu, Y.; Huang, D.Y. Design of bionic locust mouthparts stubble cutting device. Int. J. Agric. Biol. Eng. 2020, 13, 20–28. [Google Scholar] [CrossRef]
- Jia, H.L.; Li, C.Y.; Zhang, Z.H.; Wang, G. Design of Bionic Saw Blade for Corn Stalk Cut-ting. J. Bionic. Eng. 2013, 10, 497–505. [Google Scholar] [CrossRef]
- Liang, Y.C. Design and Test of Combined Straw and Stubble Crushing and Returning Ma-Chine. Master’s Thesis, Shandong University of Technology, Zibo, China, 2020. [Google Scholar]
- Wiedermann, A.; Harms, H.H. Straw-cutting machine Investigations on combine har-vester straw-cutting machine with exact reaping. In Proceedings of the Conference on Agricultural Engineering, Limenas Hersonissou, Greece, 23–25 June 2008; Volume 2045, pp. 257–262. [Google Scholar]
- Li, C.Y. Bionic Blade of Corn Harvester for Leaving High Stubble and Its Cutting Mechanism. Ph.D. Thesis, Jilin University, Changchun, China, 2014. [Google Scholar]
- Hu, J.P.; Zhao, J.; Pan, H.R.; Liu, W.; Zhao, X.S. Prediction Model of double axis rotary power consumption based on discrete element method. Trans. CSAM 2020, 51, 9–16. [Google Scholar]
- Zhao, S.H.; Liu, H.P.; Yang, C.; Yang, L.L.; Gao, L.L.; Yang, Y.Q. Design and discrete ele-ment simulation of interactive layered subsoiler with maize straw returned to filed. Trans. CSAM 2021, 52, 75–87. [Google Scholar]
- Lin, J.; Qian, W.; Niu, J. Design and Experiment of Stubble-cutting and Anti-blocking Mechanism for Ridge-till and No-till Planter. J. Shenyang Agric. Univ. 2015, 46, 691–698. [Google Scholar]
- Pei, Y.; Bian, S.F.; He, Z.; Cao, Y.; Ma, X.; Yu, J.Q. Study on a New Tilling Method of Striped Deep Loosening of Wide-Narrow Row Alternate Planting and Its Attached Machines. Trans. CSAE 2020, 5, 67–70. [Google Scholar]
- Wang, F.L.; Dong, Z.G.; Wu, Z.H.; Fang, K. Optimization of maize planting density and fer-tilizer application rate based on BP neural network. Trans. CSAE 2017, 33, 92–99, (In Chinese with English abstract). [Google Scholar]
- Inner Mongolia Province National Bureau of Statistics. In China Statistical Yearbook; China Statistical Publishing House: Beijing, China, 2020.
- Heilongjiang Province National Bureau of Statistics. In China Statistical Yearbook; China Statistical Publishing House: Beijing, China, 2020.
- Jilin Province National Bureau of Statistics. In China Statistical Yearbook; China Statistical Publishing House: Beijing, China, 2020.
- Chen, L.Q.; Liang, X.T.; Cao, C.M. Virtual Simulation and Power Test of Straw Counters-field Based on Multi-body Dynamics. Trans. CSAM 2016, 47, 106–111. [Google Scholar]
- He, J.; Zhang, Z.Q.; Li, H.W.; Wang, Q.J. Development of small/medium size no-till and minimum-till seeders in Asia: A review. Int. J. Agric. Biol. Eng. 2014, 7, 1–12. [Google Scholar]
- Liao, Q.X.; Gao, H.W.; Shu, C.X. Design of sawing anti-blocking mechanism for no-tillage planter and its cutting mechanism. Trans. CSAE 2003, 5, 64–70. [Google Scholar]
- Igathinathane, C.; Womac, A.R.; Sokhansanj, S. Corn stalk orientation effect on mechanical cutting. Biosyst. Eng. 2010, 107, 97–106. [Google Scholar] [CrossRef]
- Lu, C.Y.; He, J.; Li, H.W.; Wang, Q.J.; Zhang, X.C.; Liu, J.A. Finite Element Analysis and Experiment on Anti-blocking Device Based on Support Cutting. Trans. CSAE 2013, 44, 61–66. [Google Scholar]
- Ma, H.L.; Gao, H.W.; Li, H.W.; Wei, S.Y. Experimental Study on Corn Stalk and Rootstalk Cutting by Driven Disc. Trans. CSAE 2007, 5, 47–50+54. [Google Scholar]
- Maraldi, M.; Molari, L.; Regazzi, N.; Molari, G. Analysis of the parameters affecting the mechanical behaviour of straw bales under compression. Biosyst. Eng. 2017, 160, 179–193. [Google Scholar] [CrossRef]
- Zhao, J.L.; Wang, X.G.; Zhuang, J.; Cong, Y.J.; Lu, Y.; Guo, M.Z. Fine-Crush Straw Returning Enhances Dry Matter Accumulation Rate of Maize Seedlings in Northeast China. Agronomy 2021, 11, 1144. [Google Scholar] [CrossRef]
- Wu, H.X. Research and Simulated Analysis for Corn Stalk Harvesting Technology and Equipment. Ph.D. Thesis, Jilin University, Changchun, China, 2014. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bionic Coupling Element Levels | Test Machine Selection |
|---|---|
| BB + BD | Soil bin test using a bionic straw returning machine |
| BB + TD | Installing the Bionic straw returning-stubble cleaning universal blade on the 1JGH-2 Straw returning machine for soil bin test |
| TB + BD | Installing the traditional straw returning-stubble cleaning universal blade on the bionic straw returning machine for soil bin test |
| TB + TD | Soil bin test with 1JGH-2 straw returning machine |
| Soil Parameters | Soil Bin for Test | Average Maize-Growing Region in Northeast China |
|---|---|---|
| soil type | black clay | black clay |
| Soil compactness (MPa) | 0.99 ± 0.04 | 1.03 ± 0.06 |
| Soil moisture content (% d. b.) | 19.6 ± 0.9 | 20.1 ± 1.2 |
| Resources | Regression Model on Crushing Energy Consumption (Equation (3)) | Regression Model on Crushing Length Qualification Rate (Equation (4)) | ||||||
|---|---|---|---|---|---|---|---|---|
| Sum of Squares | df | F-Value | p-Value | Sum of Squares | df | F-Value | p-Value | |
| Model | 2.05 × 106 | 5 | 86.32 | <0.0001 ** | 138.80 | 5 | 584.39 | <0.0001 ** |
| R | 22,285.06 | 1 | 30.34 | 0.0389 * | 58.75 | 1 | 1236.85 | <0.0001 ** |
| 1.41 × 105 | 1 | 4.80 | <0.0001 ** | 70.09 | 1 | 1475.57 | <0.0001 ** | |
| R | 53,592.95 | 1 | 11.54 | 0.0025 ** | 0.25 | 1 | 5.26 | 0.0312 |
| R2 | 9.35 × 105 | 1 | 106.35 | <0.0001 ** | 1.84 | 1 | 38.71 | <0.0001 ** |
| 2 | 4.94 × 105 | 1 | 201.24 | <0.0001 ** | 6.47 | 1 | 136.11 | <0.0001 ** |
| Residual | 1.07 × 105 | 23 | / | / | 1.09 | 23 | / | |
| Lack of fit | 96,392.45 | 19 | 1.94 | 0.2746 | 1.00 | 19 | 2.29 | 0.2196 |
| Pure error | 10,455.22 | 4 | / | / | 0.092 | 4 | ||
| Cor total | 2.11 × 106 | 28 | / | / | 139.89 | 28 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Wang, X.; Zhuang, J.; Liu, H.; Wang, Y.; Yu, Y. Coupled Bionic Design Based on Primnoa Mouthpart to Improve the Performance of a Straw Returning Machine. Agriculture 2021, 11, 775. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11080775
Zhao J, Wang X, Zhuang J, Liu H, Wang Y, Yu Y. Coupled Bionic Design Based on Primnoa Mouthpart to Improve the Performance of a Straw Returning Machine. Agriculture. 2021; 11(8):775. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11080775
Chicago/Turabian StyleZhao, Jiale, Xiaogeng Wang, Jian Zhuang, Huili Liu, Yijia Wang, and Yajun Yu. 2021. "Coupled Bionic Design Based on Primnoa Mouthpart to Improve the Performance of a Straw Returning Machine" Agriculture 11, no. 8: 775. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture11080775