



Design and Experiment with a Double-Roller Sweet Potato Vine Harvester
by

Guizhi Mu
1,2,
Wanshuai Wang
1,
Tingting Zhang
1,2,
Lianglong Hu
3,
Wenxiu Zheng
1,2 and
Wanzhi Zhang
1,3,* 1
College of Mechanical and Electrical Engineering, Shandong Agricultural University, Tai’an 271018, China
2
Shandong Provincial Key Laboratory of Horticultural Machineries and Equipments, Tai’an 271018, China
3
Nanjing Research Institute of Agricultural Mechanization, Ministry of Agriculture, Nanjing 210014, China
*
Author to whom correspondence should be addressed.
Agriculture 2022, 12(10), 1559; https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture12101559
Submission received: 16 August 2022
/
Revised: 21 September 2022
/
Accepted: 23 September 2022
/
Published: 27 September 2022
(This article belongs to the Topic Emerging Agricultural Engineering Sciences, Technologies, and Applications)
Abstract
:The yield of sweet potato vines is large, making it a good source of food. However, it is difficult to harvest sweet potato vines due to creeping and intertwining. Therefore, according to the domestic sweet potato planting model, this paper designed a double roll sweet potato vine harvester which can complete the operations of vine picking, vine killing, conveying and header harvesting at one time. The machine adopts the process of front roll vine picking, rear roll vine killing and rod bar lifting. The key components of the vine picking device, vine killing device and lifting device were designed and calculated. A numerical simulation test of the vine harvesting process was carried out by using the discrete element numerical simulation method. It was determined that the length of the vine picking rod from the outside to the inside is 175 mm, 150 mm and 105 mm, respectively, and the inclination angle of the end is 160°. There are six vine killing knives on each vine killing knife plate. The inclination of the lifting device is 50°and the conveying speed is 3 m/s. Using the box Behnken experimental design method, taking the vine picking roller speed, vine killing roller speed and ground clearance as the experimental factors, and taking the sweet potato vine harvest rate, stubble height and potato injury rate as the evaluation indexes, a quadratic regression orthogonal test was carried out, the effects of various factors on the evaluation indexes were analyzed, and the experimental factors were optimized and verified. The experimental results showed that the optimal parameter combination is as follows: the rotation speed of vine picking roller should be 716 r/min, the rotation speed of vine killing roller should be 1960 r/min and the ground clearance should be 16 mm. With these parameters, the harvest rate of sweet potato vines is 93.1%, the stubble height is 29.5 mm and the potato injury rate is 0.174%. As such, the harvester meets the requirements for the mechanized harvesting of sweet potato vines and is of great significance as a light and simplified product for the sweet potato industry.
1. Introduction
With an annual planting area of 3 million hm2, China is the largest producer of sweet potatoes (Dioscorea esculenta (Lour.) Burkill) and produces over 50% of the total quantity of sweet potatoes in the world [1]. Sweet potatoes are mostly planted via ridge tillage, but sweet potato vines grow fast, reaching 1–7 m in length, and can cover ridges and intertwine together. Thus, the manual cutting, cleaning and transportation of sweet potato vines at the mature stage are labor-intensive and costly. During mechanized processing, sweet potato vines are mostly crushed and returned to fields, which causes huge wastes in terms of resource. Thanks to their high palatability and rich nutrition, sweet potato vines, stems and leaves, can be used directly as fresh feed or can be dried into dry feed [2,3]. Thus, designing sweet potato vine harvesters in accordance with the plant’s characteristics is important for the development of the sweet potato industry.
Research on sweet potato vine mechanized harvesting has been ongoing for a long time outside of China, so many good products are available to users [4,5]. For instance, the sweet potato vine crushing and processing combined harvester developed in Japan [6] is a pedrail type of machine that is capable of vine cutting, collecting, transporting, crushing and packing at one time. However, this machine is structurally complex and extremely expensive, which restrict its application in China. Sweet potato combined harvesters are commonly used in the west, such as those manufactured by Standen from the UK and Lockwood from the USA. These harvesters need no preprocessing and are capable of sweet potato piece digging as well as vine transporting, separating and packing at one time. However, these highly mechanized harvesters are expensive and applicable only to harvesting large areas of sweet potatoes. This kind of machine is not suitable for small plots in China. Research on the mechanization of sweet potato vine processing in China began later but developed very fast. So far, the products on the Chinese market mainly consist of sweet potato vine crushing and returning machines [7]. Some examples include the four-wheel-driven vine removing machine (Xuzhou Sweet potato Research Center, Xuzhou, China), the wide-ridge double-row vine removing machine (Lianyungang Yuantian Agricultural Machinery Research Institute, Lianyungang, China) and the walking-type sweet potato vine crushing and returning machine (Nanjing Institute of Agricultural Mechanization, Nanjing, China). As for sweet potato vine recovery, Zheng et al. designed a single-row sweet potato vine recovery machine [8], which is capable of vine cutting, feeding, crushing, transporting and collecting at one time, but its structure is complex and its high manufacturing cost meant that it is not suitable for the needs of Chinese farmers. Mu et al. designed a ridge-imitating sweet potato vine recovering machine, in which the ridge-imitating knife roller mechanism and the fan throwing device can crush and collect sweet potato vines [9]. However, the soil content in the sweet potato vines collected by this machine is very high. So far, the above two types of sweet potato vine harvesters have not been marketized. In recent years, the discrete element method and its simulation software, EDEM, have been widely studied and applied in the field of agricultural machinery [10,11,12,13]. The discrete element method has been applied to simulate the harvesting process of sweet potato vines in order to obtain the main parameters for the key devices of sweet potato vine harvesters with the aim of improving research and developing efficiency.
In this study, targeting sweet potato planting modes and the growing characteristics of sweet potato vines in China, we designed a double-roller sweet potato vine harvester (the front roller picks the vines and the back roller kills the vines) with a high applicability and operating performance. This study was aimed to solve the problem of sweet potato vine harvesting.
2. Materials and Methods
2.1. Measurement of Sweet Potato Field Parameters during Harvest
The basic size of a single ridge and a single sweet potato vine is the basis in terms of data for the design of parameters for a double roller sweet potato vine harvester. Field measurements were carried out on sweet potato ridges and vines at harvest time in the sweet potato experimental base of Shandong Agricultural University. Five ridges were randomly selected for each experimental field, and the number of measurement points per ridge was five [14]. Measurements for the parameters of sweet potato ridges and vines during the harvest period are shown in Table 1.
Sweet potato vines grow luxuriously and spread out on the surface, covering the top and bottom of the ridge. The water content of sweet potato vines [15,16,17] affects their toughness. With a decrease in water content, the toughness of sweet potato vines first increases rapidly and then decreases. The root trunk connecting the potato blocks is the thickest and toughest of the vines. When the sweet potato vine harvester is operating, the vine killing knife impacts and cuts off the sweet potato vine at a higher linear speed. The mechanical forces on the vine are mainly tensile forces and shear forces. When the moisture content of the sweet potato vine is 73%, the tensile force and cutting force of the root stem of the sweet potato vine can reach 110 N and 106 N when the crushing is effective [9].
2.2. Sweet Potato Vine Harvester Prototype Structure and Operating Principle
2.2.1. Structure
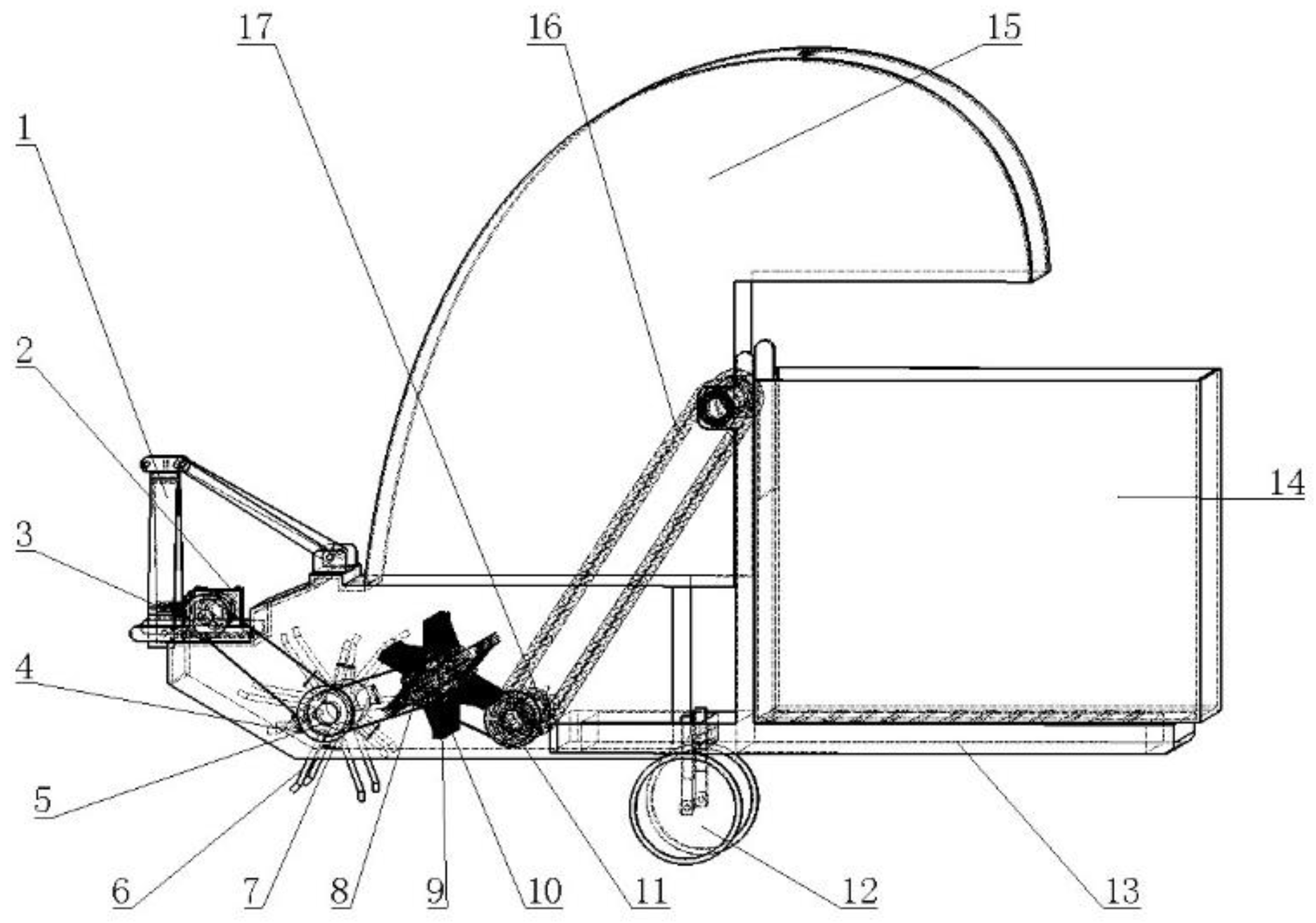
The double-roller sweet potato vine harvester mainly consists of a sweet potato vine picking device, a vine killing device and a transporting and collecting device. The vine picking device mainly includes a vine picking roller, vine picking poles and airfoil knives. The vine killing device mainly consists of a vine killing roller, vine killing knives and cutter plates. The transporting and collecting device mainly includes a rod-typed lifting device and a vine collecting container (volume is 1.5 m3). The structure of the complete machine is shown in Figure 1.
2.2.2. Working Principle
As the machine is moving forwards, the vine picking poles and airfoil knives on the vine picking roller pick up the sweet potato vines creeping in the ditches, sides and tops of ridges and throw them back to the vine killing device. When the vine killing roller rotates at a high velocity, the vine killing knives cut off the vines and throw them back to the rod-typed lifting device. Then, the lifting device transports the vine segments to the vine-collecting container. The complete machine is connected via a three-point hanging to a tractor, which transports power through transmission and belts to the vine picking roller, the vine killing roller and the lifting device [14]. The power transmission route is shown in Figure 2.
2.3. Key Part Design and Parameter Determination
2.3.1. Vine Picking Device
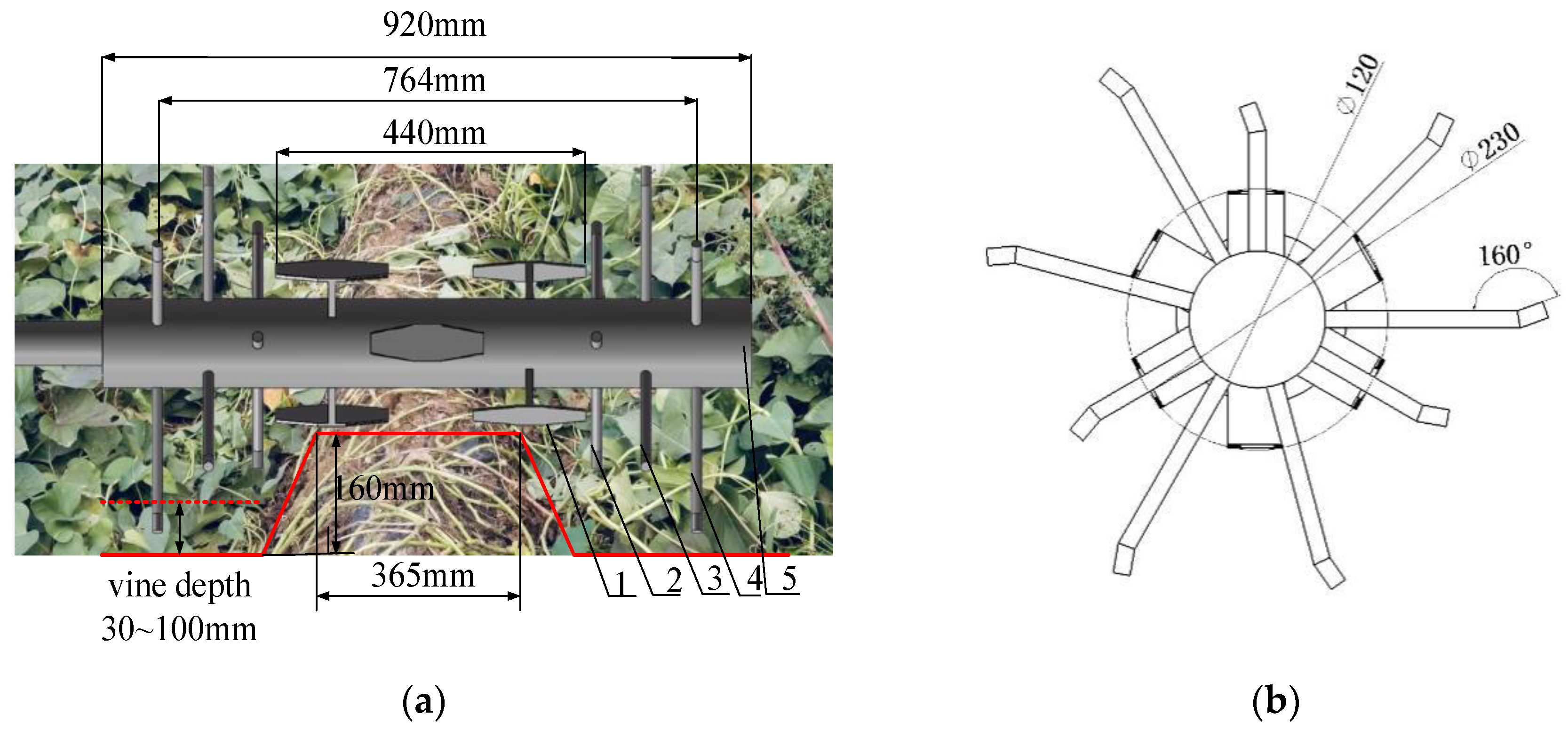
Creeping sweet potato vines cover fields and intertwine in all directions. To harvest whole-ridge sweet potato vines that have fibrils, the vine picking device will pick up the vines at ridge ditch bottoms for subsequent cutting. The structure of the vine picking device is displayed in Figure 3. The rotation speed of the vine picking roller determines the amount fed of the subsequent vine killing device. If the rotation speed is too low, it is not conducive to supplying the sweet potato vines; if the rotation speed is too high, it is easy to break the sweet potato vines, which is not conducive to the subsequent killing of the vines, resulting in a poor harvest. In order to ensure the effective picking of vines, the speed of the picking rollers was selected to be 550~800 r/min for the test [14].
2.3.2. Vine Killing Device
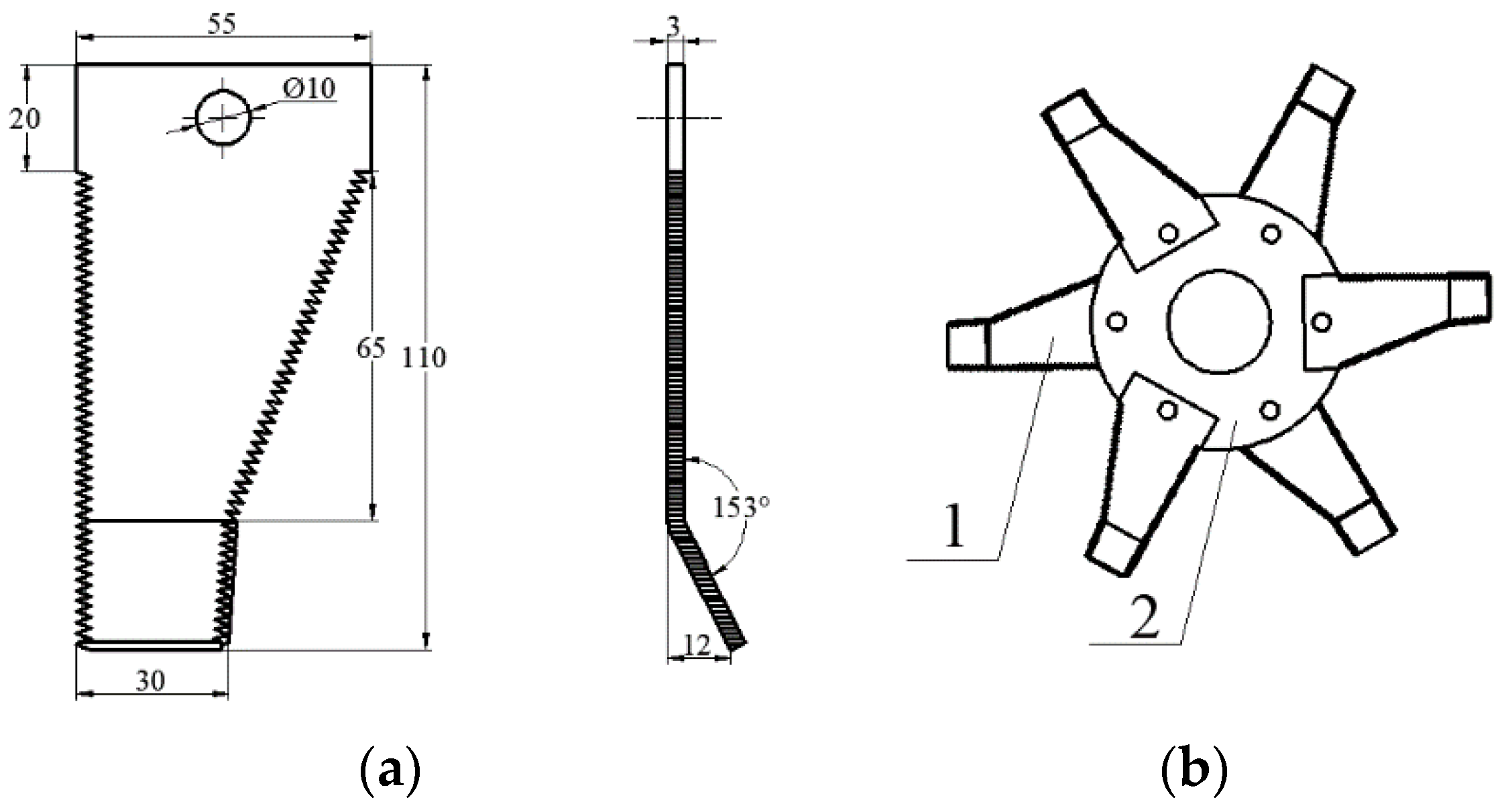
The vine killing device is the core device used to realize the harvesting of sweet potatoes. Its function is to cut off the sweet potato and throw it back to the conveying device. The vine killing knife adopts an improved L-shaped knife, which is conducive to cutting and picking up sweet potato vines, as shown in Figure 4a. The beveled edge of the improved L-shaped knife is designed to be serrated, and the top bending angle is 27° [14], which increases the cutting and sliding angle, helping to effectively cut off the sweet potato vines and reduce power consumption. The number of vine killing knives on the knife plate is an important factor which affects the length of the crushed sweet potato vines. The vine killing plate is shown in Figure 4b. During the sweet potato harvesting period, sweet potato vines have a high toughness, and the minimum speed vpm of the vine killing knife required to cut the sweet potato vines is 25 m/s. As the speed of the vine killing roller increases, the vibration of the machine increases and the energy consumption increases. To be effective, the speed range of the vine killing roller must be 1600~2200 r/min [14,18].
2.3.3. Design of Transporting Device
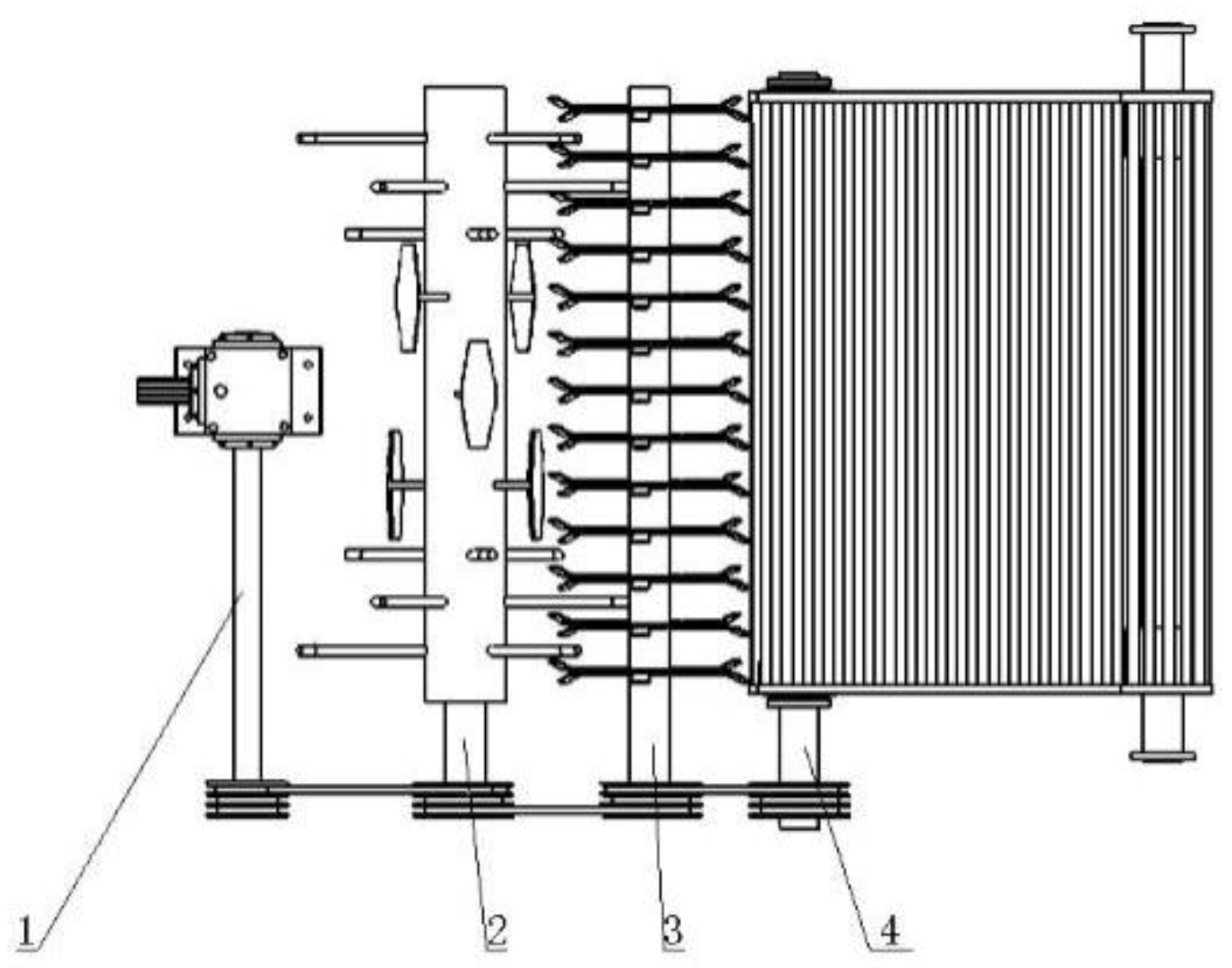
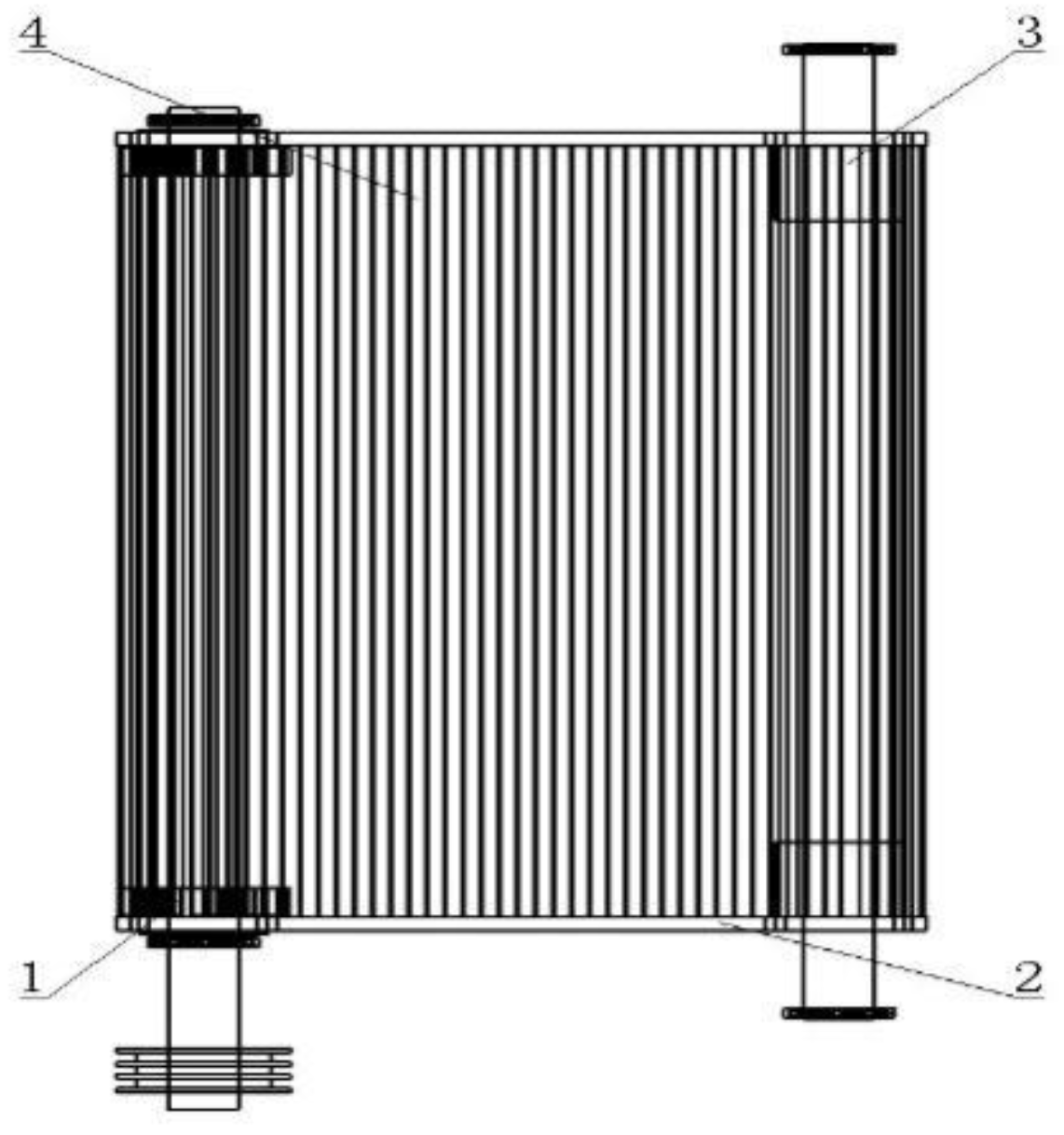
The rod-typed lifting device has a strong transporting ability and screens soils well [19]. It consists of steel hollow rod-typed conveyer belts, conveyer belt gears, rubber belts and conveyer belt trolley wheels. The two ends of the rod are fixed on the rubber belts, and the structure is shown in Figure 5.
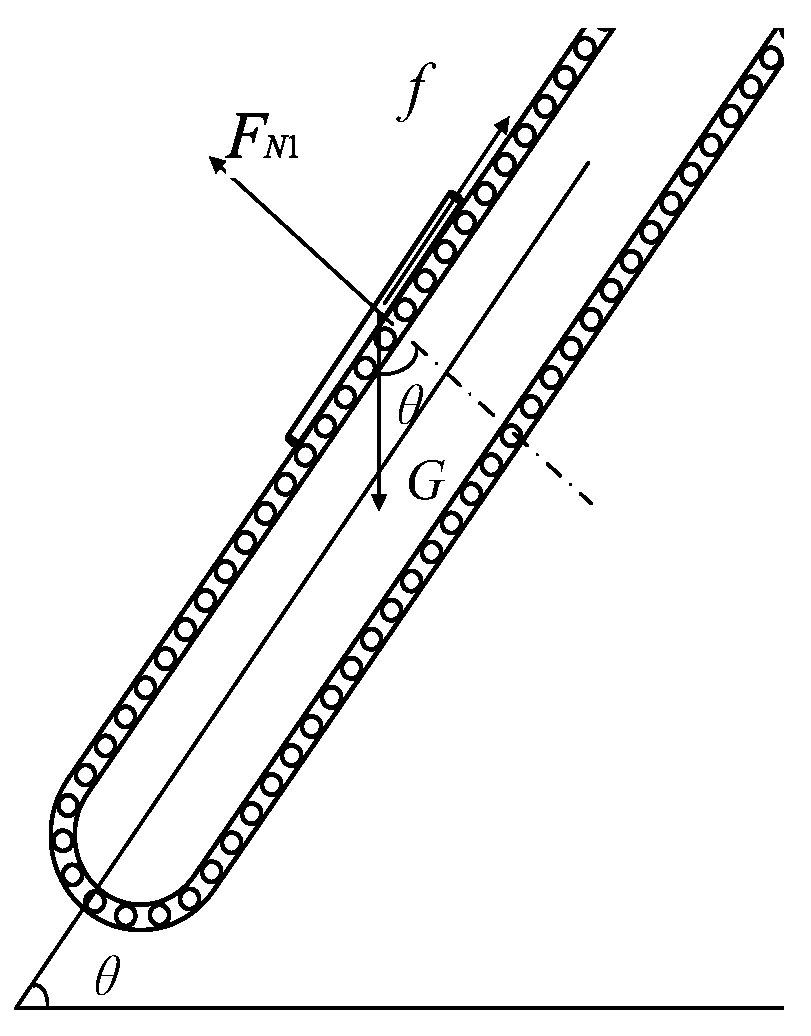
A force analysis of the broken sweet potato vines on conveyer belts is illustrated in Figure 6, where the interactions between broken sweet potato vines are ignored. The force balance equation is:
where θ—the horizontal angle between conveyer belts and the ground, °; FN1—the supporting force of conveyer belts on the broken sweet potato vines, N; f—the friction force of the conveyer belts on the sweet potato vines, N; and G—the gravity of the broken sweet potato vines, N.
The above equation, from a kinetics perspective, can be shown as:
where vs—the velocity of broken sweet potato vines after collision with the conveyer belts, m/s; a—the acceleration of broken sweet potato vines during transportation, m/s2; vt—the velocity of broken sweet potato vines arriving at the end of the conveyer belts, m/s; s—the length of conveyer belts, m; t1—the period when the broken sweet potato vines are in motion, s.
It is known from Equation (1) that
To ensure the broken sweet potato vines can be successfully transported to the collecting container, the velocity, vt, of the broken sweet potato vines at the end of the conveyer belts should be larger than 0, and s should be larger than the length of the conveyer belts. According to Equation (2), vt and s are decided by vs and a. Specifically, vs is mainly related to the transporting velocity of the conveyer belts, acceleration, a, is decided by the transporting inclination angle, θ, and the friction coefficient, μ. Hence, the transporting ability of the rod-typed lifting device is mainly decided by its inclination and transporting velocity. At a = 0, the broken sweet potato vines move at a uniform velocity and the friction coefficient, μ, between the broken vines and the rod-typed conveyer belts is 0.7. Hence, the transporting inclination required to ensure that broken vines in the motionless state will not glide down is θ = 35°. At θ < 35°, a > 0, so the velocity of the vines in motion is accelerated; at θ > 35°, a < 0, the velocity of the vines in motion is decelerated, which is unfavorable for the transportation of broken vines.
2.4. Discrete Element Simulation Test Modeling
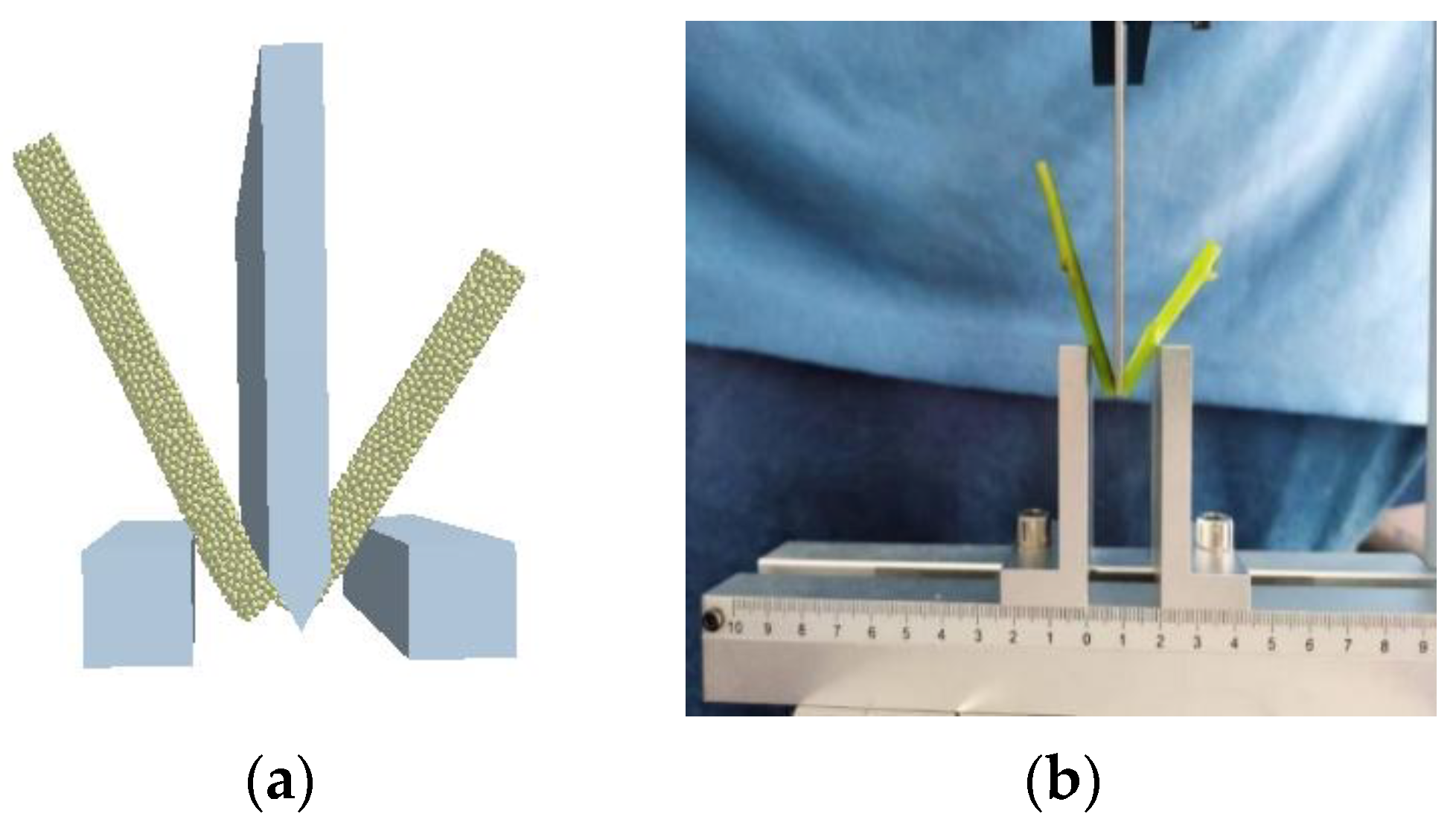
According to the dimensions of sweet potato vines in the field during the harvest period in Table 1, a flexible and breakable discrete element model of sweet potato vines with a length of 1600 mm and a diameter of 6 mm was established using the EDEM2020 software [20] based on the Hertz–Mindlin bonding contact model. The three-point bending test method was used to calibrate the bonding parameters of sweet potato vine stems, and the test picture is shown in Figure 7. The relative error between the simulation test of bending failure force based on the calibrated bonding parameters and the maximum bending failure force measured by the actual test was 0.069%, indicating that the constructed sweet potato vine stem can simulate the bending and breaking of an actual sweet potato vine stem. Table 2 shows the parameters required by the discrete element of sweet potato vine stem particles [21] and bonding parameters.
A simplified model of the double-roller sweet potato vine harvester was built on SolidWorks [22] and saved in IGS format, which was then imported to EDEM. The parts of the model are illustrated in Figure 8. The yield of sweet potato vines in the field was 30,000 kg/hm2. When the double-roller sweet potato vine harvester moved forwards at a velocity 1 m/s, the machine productivity was 2.7 kg/s. Thus, in the simulations on EDEM, the grain factory produced 2.7 kg/s of broken sweet potato vine stem grains. In the simulation test, the velocity of the vine picking roller was set to 675 r/min, the velocity of the vine killing roller was 1900 r/min and the ground clearance was 15 mm.
2.5. Field Experiments
2.5.1. Conditions
To ensure the double-roller vine harvester can operate at the optimal working parameters, we conducted field tests at the sweet potato planting base of Shandong Agricultural Unversity in November 2021. The sweet potato variety was Shangshu 19. The vines length, root diameter, water content and soil water content were, on average, 1800 mm, 7 mm, 73.7%, and 21.6%, respectively. The instruments and equipment used in the tests were the double-roller sweet potato vine harvester, a moisture meter, an electronic balance, tape measures, scissors, a protractor and a kit. The auxiliary power was provided by a Lovol M250-E tractor at a power of 18.8 kW. The field test conditions are shown in Figure 9.
2.5.2. Parameters and Methods
Energy cost should be considered when harvesting sweet potatos and vines. When the sweet potato vine harvester is operating, the power output by the tractor is mainly used to drive the vine picking roller, the vine killing roller and the conveyor belt. Therefore, reducing their working speed on the premise of ensuring the quality of the harvest is conducive to saving costs. The working performance evaluation indices of the vine harvester mainly include harvest rate, stubble height and sweet potato damage rate. The key factors affecting the vine harvesting performance are the rotating velocities of the vine picking roller and the vine killing roller. The working ranges of the parameters were determined from the above theoretical calculations. Field tests showed that the vine harvesting performance was affected by the ground clearance (distance from the airfoil knife end of the vine picking roller to the ridge top, mm). When the ground clearance was low, the sweet potatoes were easily damaged. When the ground clearance was high, the stubble height was too high, which decreased the vine harvest rate. Thus, the moving velocity of the tractor was set at 1 m/s. Then, quadratic regression orthogonal tests in a Box–Behnken design [23] were conducted by choosing the vine picking roller rotation velocity, vine killing roller rotation velocity and ground clearance as testing factors and by selecting the vine harvest rate, stubble height and sweet potato damage rate as evaluation indices. The testing factors and codes are listed in Table 3.
The five-point method from GB/T 5262-2008 [24] was chosen. At each testing point, the measuring length was 3 m. Then, each index was measured at the five points, and the average value was determined.
The measurement of the vine harvest rate: after the operation of the machinery, the total mass of sweet potato vines in the container was weighed (m1), the sweet potato vines left on the ground in the testing area were collected and the total mass was weighed (m0). The yield of sweet potato vines was computed as follows:
where Y1—the yield of vines from field tests, %; m0—the total mass of residual vines on the ground, kg; m1—the mass of vines collected in the container, kg.
The stubble height is the length of the ridge top vines after the operation of machinery. The average stubble height at each testing point was calculated as:
where Y2—the stubble height, mm; Ln—the total length of stubble top vines, mm; N—the total number of ridge top vines.
Sweet potato damage refers to the different levels of damage dealt to sweet potatoes by the machinery during its operation. The damage rate at each testing point was calculated as:
where Y3—the damage rate, %; mz—the total mass of sweet potatoes, kg; ms—the total mass of damaged sweet potatoes, kg.
3. Results and Discussion
3.1. Simulation Analysis of Key Device Parameters
3.1.1. Simulation Analysis of Vine Picking Device
There is a certain angle of inclination at the end of the vine picking pole which can effectively increase the contact range between the vine picking pole and the sweet potato vines. In order to determine the length of the vine picking pole and the angle of inclination the end of the vine picking pole, a simulation test was carried out for the picking operation of the picking roller.
In order to count the number of sweet potato vines picked up by the vine picking pole, a total mass sensor was designed to count the total mass of the sweet potato vine stem particles entering the vine collecting box, and thios was called the quality of picking vines. The total mass of the stem particles of the sweet potato vines was statistically generated, and this was called the generated mass. The rate of picking sweet potato vines is expressed as
where Yt—the rate of picking sweet potato vines, %; Mt—the quality in terms of picking vines, kg; Ms—the generated mass, kg.
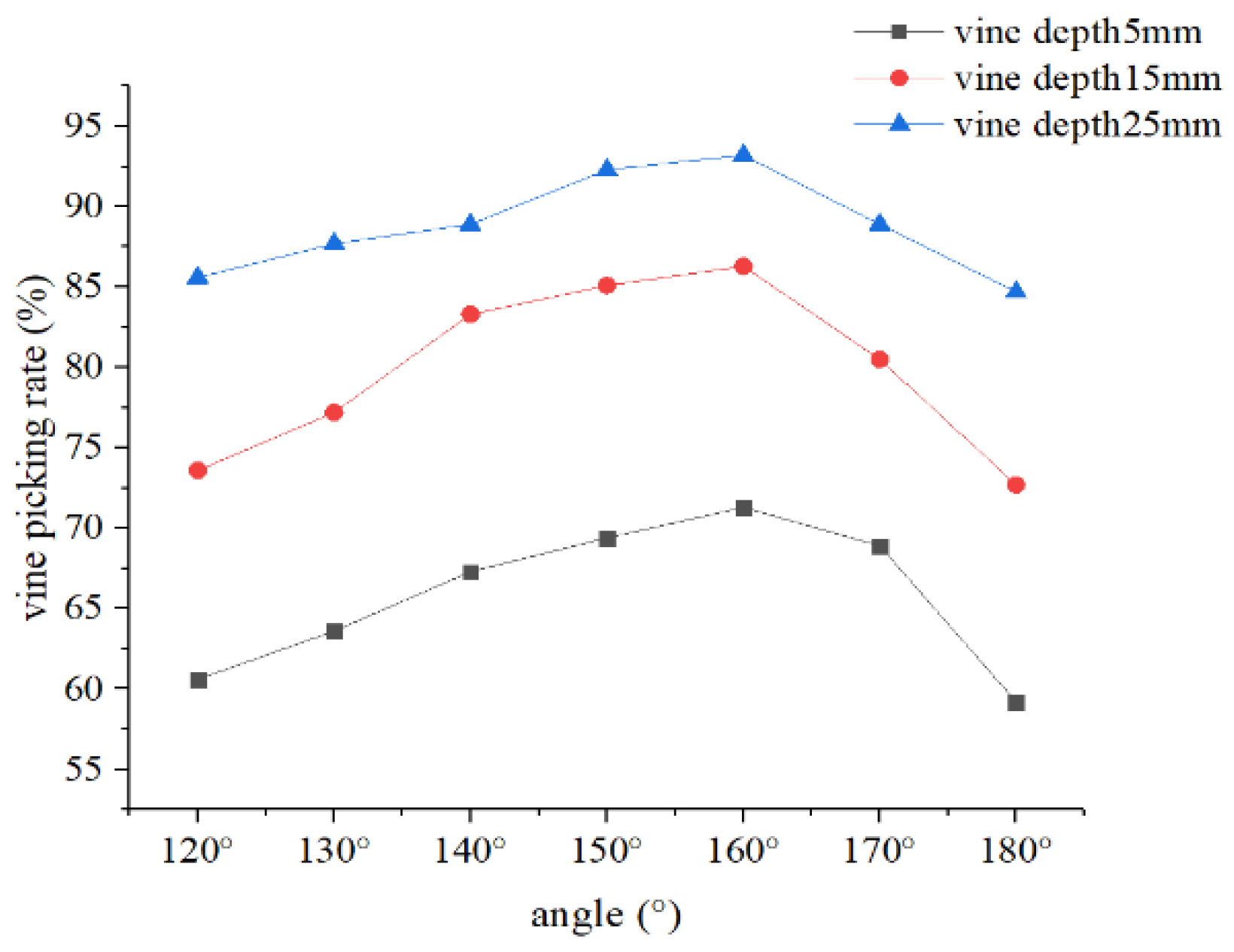
When the rotation velocity of the picking roller is constant, the quality of the vines is related to the depth of the vine picking pole entering the vines and the angle of inclination of the end of the vine picking pole. The curve of the rate of the vine picking, as determined by the simulation, is shown in Figure 10. When the angle of inclination of the end is constant, the rate of vine picking increases with an increase in the vine insertion. When the depth of vine insertion is constant, the rate of vine picking first increases and then decreases with an increase in the angle of the inclination of the end. When the vine insertion depth is 25 mm and the angle of inclination of the end is 160°, the vine picking rate is at its highest. In order to ensure that the sweet potato vines are lifted and that the vine picking poles do not enter the soil, it was determined that the lengths of the vine picking poles from the outside to the inside are 175 mm, 150 mm and 105 mm, respectively, and the angle of inclination of the end is 160°.
3.1.2. Simulation Analysis of Killing Vine
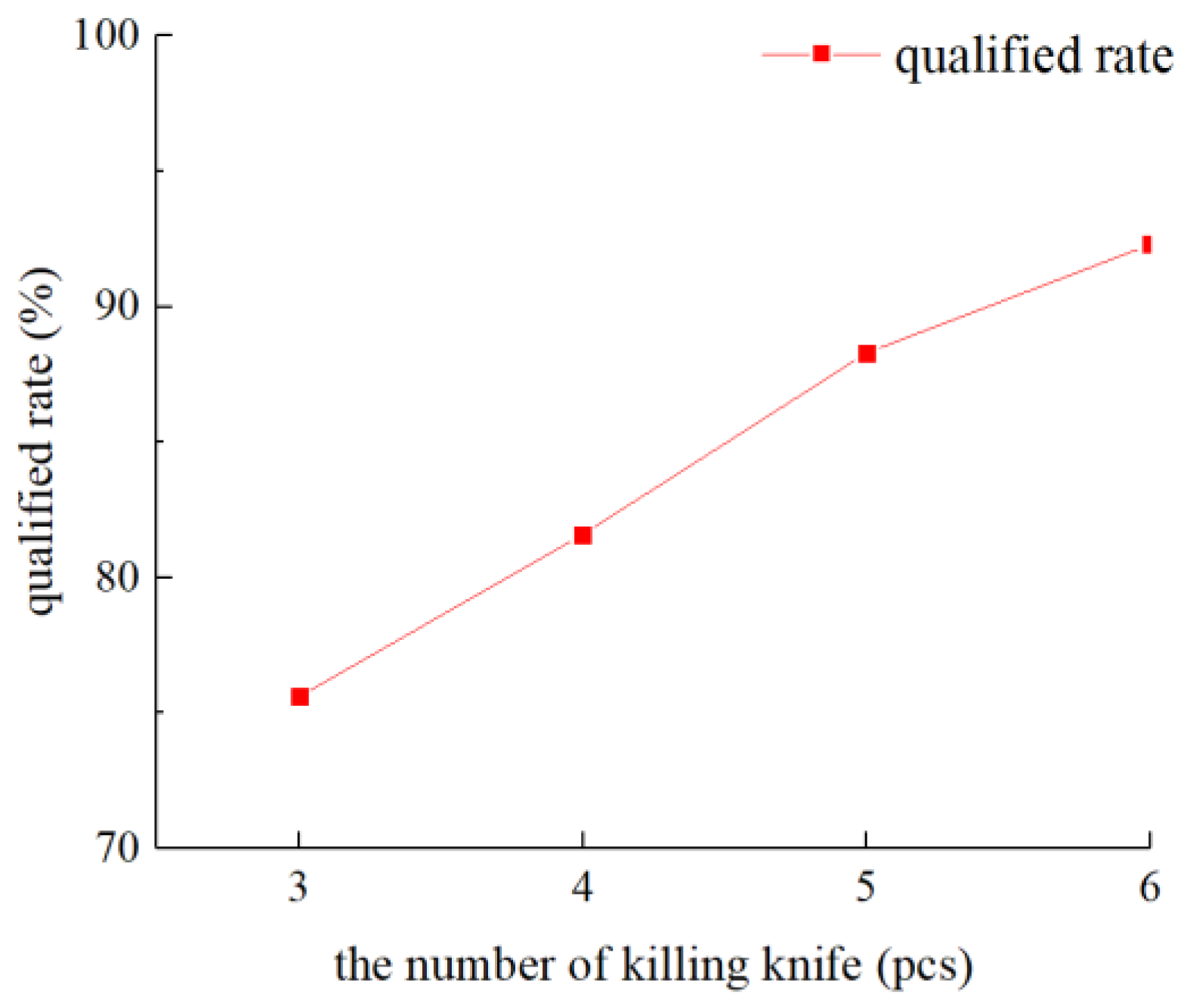
When the velocity of the killing roller is constant, the length of harvested sweet potato vines is mainly determined by the number of cutter plates and the number of killing knives on the plate. If the length of the sweet potato vines is too large, it is easy to cause entanglement, and if it is too short, it is easy for it to fall off. The length of the broken sweet potato vines should be in the range of 10~35 mm throughout the preliminary test, which is easy for later transportation and drying. The number of cutter plates was determined to be 13 for the convenience of the arrangement of the rollers. To determine the number of killing knives on each cutter plate, a simulation analysis was carried out. In order to count the qualified rate of broken sweet potato vines, the length of the sweet potato vines in the vine collecting box was counted. The qualified rate of sweet potato vines is expressed as
where Yh—the qualified rate, %; Mg—the quality of sweet potato vines with a length of 10~35 mm, kg; Ms—the quality of sweet potato vines collected in the collection box, kg.
The change curve of the pass rate with the number of killing knives is shown in Figure 11. With the increase in the number of killing knives, the qualified rate of broken sweet potato vines increases. There are a total of six killing knives on each cutter plate, which are staggered at 60° on both sides and fixed on the cutter plate by bolts.
3.1.3. Simulation Analysis of Transporting Device
Due to the large output of sweet potato vines, increasing the storage capacity of the collection box can reduce the number of times the machine has to be parked. With a greater conveyer belt conveying angle, the height of the collection box can be increased accordingly, thereby increasing the storage volume. Therefore, we hoped to increase the conveying angle as much as possible without the reward rate for sweet potato vines. When applying a simulation test of the discrete element software, EDEM, for the shattered sweet potato vine delivery operation under the premise of satisfying the harvest rate for sweet potato vines, the simulation analysis determined the ideal tilt angle and conveying velocity of the conveyer belt.
In the postprocessing module of EDEM, the total mass of broken vine stem grains put into the collection box was statistically analyzed, and this was called the harvesting mass. The total mass of resulting broken stem grains was statistically analyzed, with this being called the production mass. The sweet potato vine harvesting rate is:
where Ys—the harvest rate of sweet potatoes, %; Mh—the mass of the harvest, kg; Ms—the mass of production, kg.
The changing curves of the average grain velocity with the conveying angle of inclination are shown in Figure 12. When the conveying velocity of conveyer belts was 2 m/s, the average grain velocity declined as the conveying angle of inclination increased. The grain movement velocity on the conveyer belts first declined and then rose for a short time. When the angle of inclination of the conveyer belt was 35°, the grain velocity rose to 2 m/s, which was the same as the conveyer belt velocity, and then gradually decreased. The velocity of grains falling into the collecting box gradually declined to 0. When the conveying angle of inclination was larger than 35°, the highest grain velocity was lower than the conveying velocity, which is consistent with the theoretical analysis above.
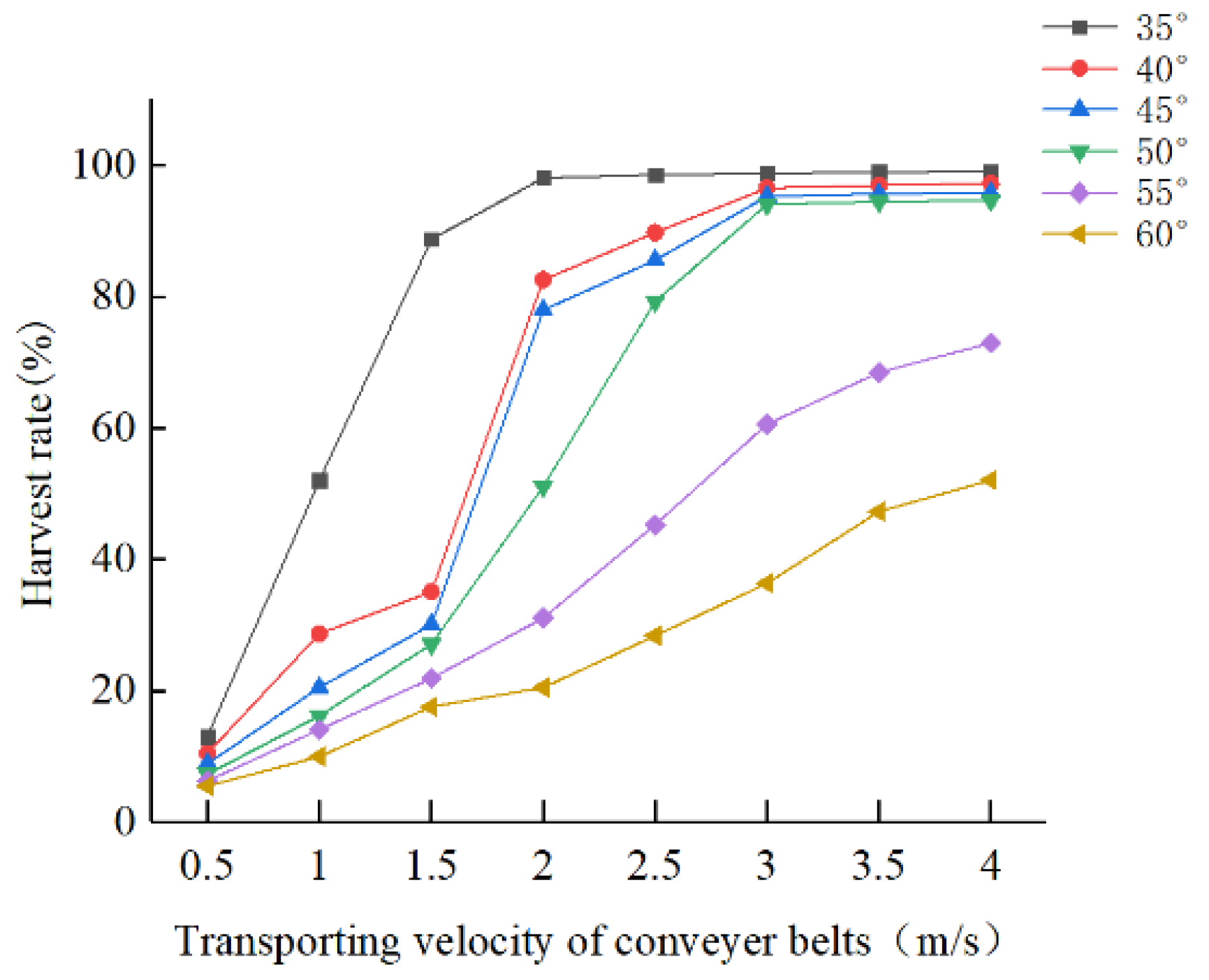
When the transporting velocity was above 4 m/s, the machine noticeably vibrated, so the highest possible transporting velocity for the conveyer belts during the simulations was set at 4 m/s. Figure 13 shows the changing curves for the vine harvesting rate along with the variation in transporting velocity when the transporting angle of inclination differed. When the transporting angle of inclination was constant, the vine harvesting rate increased with the rise in transporting velocity. The harvesting rate increased rapidly when the transporting velocity was above 1.5 m/s and increased slowly when the transporting velocity was above 3 m/s. When the transporting velocity was constant, the vine harvesting rate declined with the enlargement of the transporting angle of inclination. When the transporting angle of inclination was larger than 50°, the vine harvest rate was lower than 90%. To ensure a high vine harvest rate, we set the transporting angle of inclination to 50° and the transporting velocity at 3 m/s, at which the vine harvesting rate was 94.1%.
3.2. Results and Analysis of Field Experiments
3.2.1. Results of Field Experiments
The three-factor three-level test scheme involved 17 sets of tests (5 sets of zero-point estimation errors, 12 sets of analytical factors). The scheme and results are listed in Table 4.
3.2.2. Regression Equations and Analysis
Response surface methodology (RSM) regression models were built on Design Expert 10.0.4 [25]. Then, analysis of variance (ANOVA) was conducted (Table 5). The quadratic polynomial RSM models of crushing qualified rate, Y1, stubble height, Y2, and sweet potato damage rate, Y3, over the vine picking roller rotating velocity, x1, vine killing roller rotating velocity, x2, and ground clearance, x3, are shown in Equations (10)–(12):
In the RSM models, the p values for the vine harvest rate, Y1, stubble height, Y2, and sweet potato damage rate, Y3, are all smaller than 0.01 (Table 5), indicating that the regression models built here are extremely significant. The lack-of-fit results are all above 0.05, suggesting that the regression Equations (10)–(12) fit well. The coefficient of determination, R2, is 0.9226, 0.9433 and 0.9943, indicating that the three models can all explain over 92% of the average indicators. After the insignificant factors were removed, we had arrived at an optimized model:
3.2.3. Analysis of Interactions
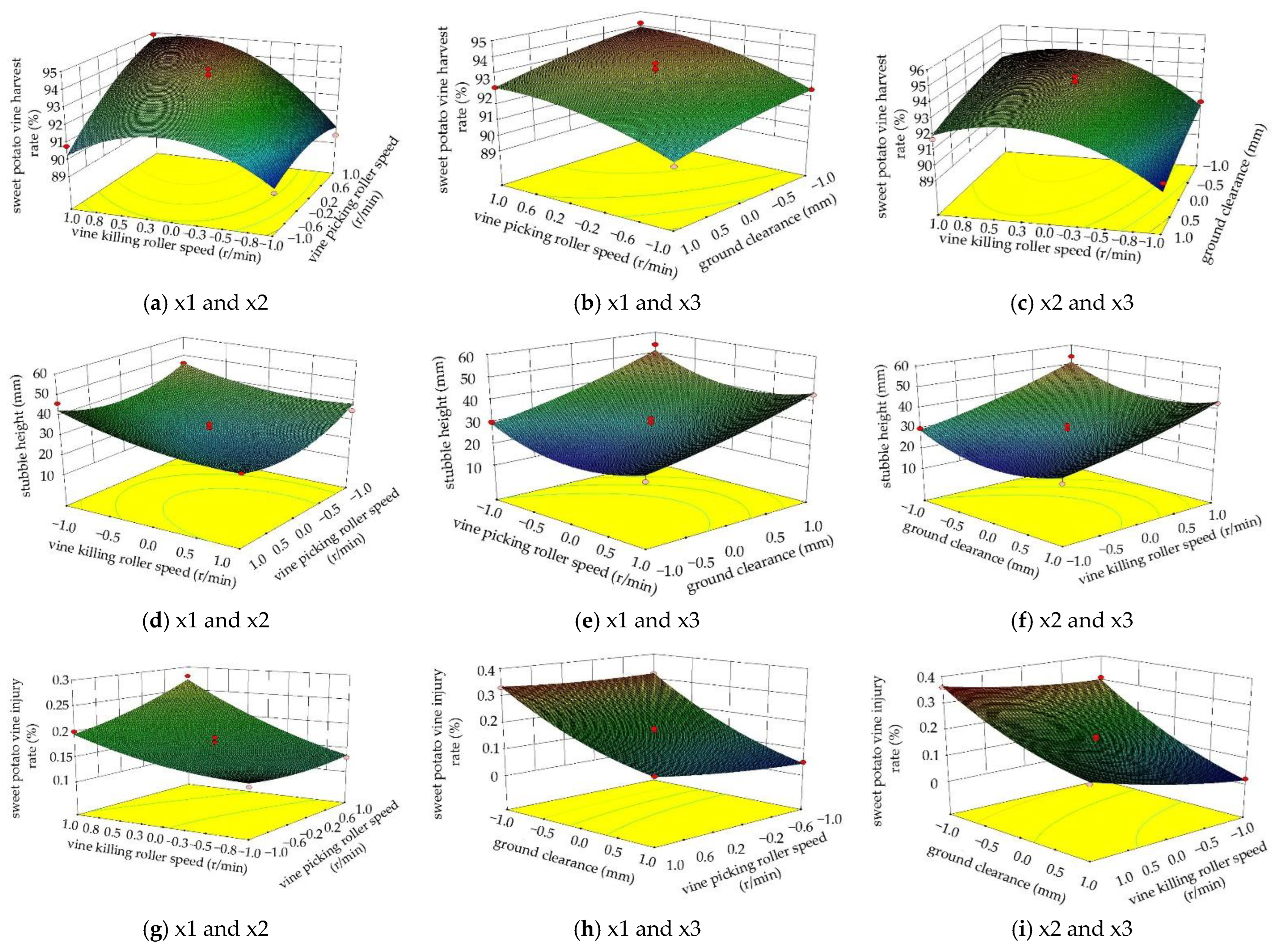
According to the analytical results of the regression equations, RSM curves were plotted on Design Expert 10.0.4 (Figure 14). The effects of vine picking roller rotating velocity, x1, vine killing roller rotating velocity, x2, and ground clearance, x3, on the response value were analyzed. The vine harvest rate increases with the enlarged rotating velocity of the vine picking roller when the rotating velocity of the vine killing roller is constant and the ground clearance is at the central level (15 mm) (Figure 14a). When the rotating velocity of the vine picking roller is constant, the vine harvest rate increases with the accelerated rotating velocity of the vine killing roller. Enlarging the ground clearance decreases the vine harvest rate when the rotating velocity of the vine killing roller is at the central level (1900 r/min) and the rotating velocity of the vine picking roller is constant (Figure 14b). Enlarging the rotating velocity of the vine killing roller and narrowing the ground clearance help increase the vine harvest rate when the rotating velocity of the vine picking roller is at the central level (675 r/min) (Figure 14c). The contribution rates of the three factors to the vine harvest rate rank as rotating velocity of the vine killing roller > rotating velocity of the vine picking roller > ground clearance. Accelerating the rotating velocities of the vine picking roller and the vine killing roller does not significantly change the stubble height when the ground clearance is at the central level (15 mm) (Figure 14d). The stubble height decreases with a narrowing ground clearance when the rotating velocity of the vine killing roller is at the central level (1900 r/min) and the rotating velocity of the vine picking roller is constant (Figure 14e). The stubble height first decreases and then increases slightly as the rotating velocity of the vine picking roller is accelerated when the ground clearance is constant. Narrowing the ground clearance can decrease the stubble height when the rotating velocity of the vine picking roller is at the central level (675 r/min) and the rotating velocity of the vine killing roller is constant (Figure 14f). Enlarging the rotating velocity of the vine killing roller can decrease the stubble height when the ground clearance is constant. The contribution rates of the three factors to the stubble height rank as ground clearance > rotating velocity of the vine killing roller > rotating velocity of the vine picking roller. Decelerating the rotating velocities of the vine killing roller and the vine picking roller can decrease the sweet potato damage rate when the ground clearance is at the central level (15 mm) (Figure 14g). Enlarging the ground clearance can decrease the sweet potato damage rate when the rotating velocity of the vine killing roller is at the central level (1900 r/min) and the rotating velocity of the vine picking roller is constant (Figure 14h). Enlarging the ground clearance can significantly decrease the sweet potato damage rate when the rotating velocity of the vine picking roller is at the central level (675 r/min) and the rotating velocity of the vine killing roller is constant (Figure 14i). Decelerating the rotating velocity of the vine killing roller can reduce the damage rate when the ground clearance is constant. The contribution rates of the three factors to the sweet potato damage rate rank as ground clearance > rotating velocity of the vine killing roller > rotating velocity of the vine picking roller.
3.3. Model Optimization
The above analyses suggest that accelerating the rotating velocities of the vine picking roller and vine killing roller or narrowing the ground clearance can improve the sweet potato vine harvest rate and shorten the stubble height, but these will intensify the damage dealt to sweet potatoes. To improve the operating performance of the sweet potato vine harvester, we optimized the working parameter combination of the vine harvester with the aim of improving the vine harvest rate and decreasing both the stubble height and sweet potato damage rate. Together with the boundary conditions of the testing factors, we built mathematical models and found multiobjective optimization solutions to operation performance index regression models. The optimization objective function and constraint conditions are:
The parameters were optimized and solved on Design-Expert 10.0.4 to find out the optimal parameter combination: When the rotation velocity of vine picking roller was 715.67 r/min, the rotation velocity of the vine killing roller was 1960 r/min and the ground clearance was 15.8 mm, the harvest rate of sweet potato vines was 94.15%, the stubble height was 28.07 mm and the sweet potato injury rate was 0.17%.
3.4. Experimental Validation
To validate the optimized results, we conducted validation tests under the same conditions. Based on the model optimization results and with the suitable adjustment of testing parameters, the rotating velocity of the vine picking roller was 716 r/min, the rotating velocity of vine killing roller was 1960 r/min and the ground clearance was 16 mm. The tests were repeated five times, and the average values were determined. The vine harvesting rate was 93.1%, the stubble height was 29.5 mm and the sweet potato damage rate was 0.174%, with relative errors of which from the optimized values being 1.1%, 2.4% and 2.4%, respectively. Thus, the mean testing values were consistent with the optimized values, as the relative errors were all smaller than 5%, indicating that the regression models are accurate. When the forward speed of the machine is 1 m/s, its working efficiency is 0.32 hm2/h. The operational effect of the optimized sweet potato vine harvester is illustrated in Figure 15.
4. Discussion
The harvester can effectively harvest sweet potato seedlings, which is suitable for the single ridge and single row sweet potato planting model used in China. Compared with large sweet potato harvesters used in the United States and other countries, this model is light and can be used with domestic tractors without large power units. Compared with other domestic models, this prototype has a simpler structure and is more convenient for users. Follow-up work should further optimize the machine’s structure and working parameters in terms of reducing energy costs.
5. Conclusions
- (1)
- A double-roller sweet potato vine harvester was designed, in which the front and back rollers were used to pick and kill vines respectively. This harvester can operate well and solves the problem of sweet potato vine harvesting.
- (2)
- The discrete element numerical simulation method was used to carry out numerical simulation tests on the harvesting process, and it determined that the lengths of the vine picking poles from the outside to the inside are 175 mm, 150 mm and 105 mm, respectively, and that the angle of inclination of the end is 160°. Each knife plate has six killing knives; the angle of inclination of the transporting device is 50° and the conveying velocity is 3 m/s.
- (3)
- The optimal parameter combination is a vine picking roller rotation velocity of 716 r/min, a vine killing roller rotation velocity of 1960 r/min and a ground clearance of 16 mm, which results in a vine harvest rate of 93.1%, a stubble height of 29.5 mm and a sweet potato damage rate of 0.174%, with its working efficiency being 0.32 hm2/h.
Author Contributions
Conceptualization, G.M., W.W. and W.Z. (Wanzhi Zhang); methodology, G.M., W.W., W.Z. (Wanzhi Zhang), T.Z., L.H. and W.Z. (Wenxiu Zhen); software, G.M. and W.W.; validation, G.M., W.W., T.Z., W.Z. (Wanzhi Zhang) and W.Z. (Wenxiu Zhen); resources, L.H.; data curation, W.W.; writing—original draft preparation, W.Z. (Wanzhi Zhang) and W.W.; writing—review and editing, G.M., W.W. and W.Z.(Wenxiu Zhen). All authors have read and agreed to the published version of the manuscript.
Funding
This work was funded by Agricultural Machinery Post Expert Project, China (No. SDAIT-16-10), the China Agriculture Research System of MOF and MARA, National Key Research and Development Project, China (NO.2020YFD1000802-05), the Green Farming and Mechanization of Underground Fruits Harvesting Innovation Project of the Chinese Academy of Agricultural Sciences and the Postdoctoral Research Funding Program of Jiangsu Province, China (No. 2020Z101), the Special Project for the Construction of a National Modern Agricultural Sweet Potato Industry Technology System (CARS-10-B-18), The General Program of Natural Science Foundation of Shandong Province (ZR2021ME173).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data are available within the article.
Acknowledgments
The authors thank the College of Mechanical and Electronic Engineering of Shandong Agricultural University and Agricultural Machinery Post Expert Project, China, for their facilities and support.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, X.; Lu, J.; Wang, X.; Wang, K. Analysis on layout evolution of sweet potato production in China and its influencing factors. Chin. J. Agric. Resour. Reg. Plan. 2022, 43, 1–12. [Google Scholar]
- Megers, T.; Urge, M.; Nurfeta, A. Effects of feeding sweet potato vines as a supplement on feed intake, growth performance, digestibility and carcass characteristics of sidama goats fed a basal diet of natural grass hay. Trop. Anim. Health Prod. 2013, 45, 593–601. [Google Scholar] [CrossRef]
- Kakahy, A.N.; Ahmad, D.; Akhir, M.; Sulaiman, S.; Ishak, A. Effects of rotary mower blade cutting angles on the pulverization of sweet potato vine. Agric. Agric. Sci. Procedia 2014, 2, 95–101. [Google Scholar] [CrossRef]
- Pedrosa, C.E.; Andrade Júnior, V.C.; Pereira, R.C.; Dornas, M.F.; Azevedo, A.M.; Ferreira, M.A. Yield and quality of wilted sweet potato vines and its silages. Hortic. Bras. 2015, 33, 283–289. [Google Scholar] [CrossRef]
- Akhir, H.; Ahmad, D.; Rukunudin, I.H. Field performance of a two-row sweet potato harvester prototype in bris soil. Int. J. Eng. Technol. 2011, 8, 6–11. [Google Scholar]
- Smith, S.L.; Wright, M.E. A Preharvest vine disposal machine for sweet potatoes. Appl. Eng. Agric. 1994, 10, 321–326. [Google Scholar] [CrossRef]
- Wu, T. Design and Optimization of Walking Sweet Potato Vines Crushing and Returning Machine. Nanjing. Chin. Soc. Agric. Eng. 2017, 33, 10. [Google Scholar]
- Zheng, W.; Lü, Z.; Zhang, W. Design and test of single row sweet potato vine recycling machine. Trans. CSAE 2019, 35, 1–9. [Google Scholar]
- Mu, G.; Xin, Q.; Xuan, G. Design and experiment of knife roller and throwing device for sweet potato vine recycling machined. Trans. Chin. Soc. Agric. Mach. 2019, 50, 53–61. [Google Scholar]
- Barr, J.B.; Desbiolles, J.M.; Fielke, J.M.; Ucgul, M. Development and field evaluation of a high-speed no-till seeding system. Soil Tillage Res. 2019, 194, 104337. [Google Scholar] [CrossRef]
- Lenaerts, B.; Aertsen, T.; Tijskens, E.; De Ketelaere, B.; Ramon, H.; De Baerdemaeker, J.; Saeys, W. Simulation of grain-straw separation by discrete element modeling with bendable straw particles. Comput. Electron. Agric. 2014, 101, 24–33. [Google Scholar] [CrossRef]
- Leblicq, T.; Smeets, B.; Ramon, H.; Saeys, W. A discrete element approach for modelling the compression of crop stems. Comput. Electron. Agric. 2016, 123, 80–88. [Google Scholar] [CrossRef]
- Byum, J.H.; Nam, J.S.; Choe, J.S.; Inoue, E.; Okayasu, T.; Kim, D.C. Analysis of the separating performance of a card cleaner for pepper harvester using EDEM software. J. Fac. Agric. 2018, 63, 347–354. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, T.; Tian, F.; Wang, G.; Wang, W.; Wu, S.; Hu, L. Design and test on double-roller sweet potato vine crushing and returning machine. J. Appl. Sci. Eng. 2021, 25, 637–650. [Google Scholar]
- Boac, J.M.; Casada, M.E.; Maghirang, R.G.; Harner, J.P. Material and interaction properities of selected grains and oilseeds for modeling discrete practices. Trans. ASABE 2010, 53, 1201–1216. [Google Scholar] [CrossRef]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three-dimensional discrete element modelling of tillage: Determination of a suitable contact model and parameters for a cohesionless soil. Biosyst. Eng. 2014, 121, 105–117. [Google Scholar] [CrossRef]
- Leblicq, T.; Smeets, B.; Vanmaercke, S.; Ramon, H.; Saeys, W. A discrete element approach for modelling bendable crop stems. Comput. Electron. Agric. 2016, 124, 141–149. [Google Scholar] [CrossRef]
- Zheng, W.X.; Lü, Z.Q.; Lu, Y.; Liu, Z.D.; Cheng, X.X. Shear properties test of sweet potato vine in mature period. Int. Agric. Eng. J. 2017, 26, 204–212. [Google Scholar]
- Zeng, L.; Cao, Y.; Zhong, X.; Wang, W.; Huang, W. Design of stem-leaf separation device for sugar canes. China South. Agric. Mach. 2021, 52, 36–38. [Google Scholar]
- Available online: https://www.altair.com/edem/ (accessed on 20 June 2022).
- Lü, H.; Mu, G.; Zheng, W.; Zhang, W.; Lü, Z.; Zhang, T. Gas-solid coupling simulation and experimental optimization of throwing device of sweet potato seedling recycling machine. Trans. Chin. Soc. Agric. Mach. 2021, 52, 213–222. [Google Scholar]
- Available online: https://www.solidworks.com/ (accessed on 28 June 2022).
- Available online: https://www.statease.com/software/design-expert/ (accessed on 29 June 2022).
- GB/T7714—2005; Measuring Methods for Agricultural Machinery Testing Conditions-General Rules. Standards Press of China: Beijing, China, 2008.
- Box, G.E.P.; Hunter, W.G.; Hunter, J.S. Statistics for Experiments: An Introduction to Design. Data Analysis and Model Building. Med. Phys. 1981, 8, 526–527. [Google Scholar]
Figure 1.
Structure of double-roller sweet potato vine harvester: 1. suspension frame; 2. transmission; 3. driving pulley; 4. vine picking roller pulley; 5. vine picking roller; 6. vine picker; 7. airfoil cutter; 8. vine killing roller pulley; 9. vine killing roller; 10. vine killing knife; 11. elevator drive pulley; 12. depth limiting wheel; 13. vine collecting frame; 14. vine collecting box; 15. shield; 16. rod conveyor belt; 17. conveyor belt gear.
Figure 1.
Structure of double-roller sweet potato vine harvester: 1. suspension frame; 2. transmission; 3. driving pulley; 4. vine picking roller pulley; 5. vine picking roller; 6. vine picker; 7. airfoil cutter; 8. vine killing roller pulley; 9. vine killing roller; 10. vine killing knife; 11. elevator drive pulley; 12. depth limiting wheel; 13. vine collecting frame; 14. vine collecting box; 15. shield; 16. rod conveyor belt; 17. conveyor belt gear.

Figure 2.
Power transmission route: 1. transmission output shaft; 2. Vine picking roller; 3. vine killing roller; 4. elevator drive shaft.
Figure 2.
Power transmission route: 1. transmission output shaft; 2. Vine picking roller; 3. vine killing roller; 4. elevator drive shaft.

Figure 3.
Schematic diagram of picking device structure. (a) Layout diagram of vine picking device. (b) Radial diagram of vine picker: 1. airfoil knives; 2. internal vine picking poles; 3. middle vine picking poles; 4. outside vine picking poles; 5. vine picking roller.
Figure 3.
Schematic diagram of picking device structure. (a) Layout diagram of vine picking device. (b) Radial diagram of vine picker: 1. airfoil knives; 2. internal vine picking poles; 3. middle vine picking poles; 4. outside vine picking poles; 5. vine picking roller.

Figure 4.
Structure and distribution of vine killers. (a) Improving the structure of L-type vine killing knife. (b) Distribution of vine killers: 1. vine killing knife; 2. cutter head.
Figure 4.
Structure and distribution of vine killers. (a) Improving the structure of L-type vine killing knife. (b) Distribution of vine killers: 1. vine killing knife; 2. cutter head.

Figure 5.
Structural diagram of rod-typed lifting device: 1. conveyer belt gear; 2. rubber belt; 3. conveyer roller; 4. rod conveyer belt.
Figure 5.
Structural diagram of rod-typed lifting device: 1. conveyer belt gear; 2. rubber belt; 3. conveyer roller; 4. rod conveyer belt.

Figure 6.
Mechanical analysis of crushed sweet potato vines on conveyer belt.

Figure 7.
Three-point bending failure test of sweet potato vine stem: (a) bending failure simulation model; (b) bending failure test.
Figure 7.
Three-point bending failure test of sweet potato vine stem: (a) bending failure simulation model; (b) bending failure test.

Figure 8.
Schematic diagram of simplified simulation model: 1. vine picking device; 2. vine killing device; 3. transporting device; 4. sweet potato ridge; 5. vine collecting box; 6. shield; 7. total mass sensor; and 8. DEM of sweet potato vine.
Figure 8.
Schematic diagram of simplified simulation model: 1. vine picking device; 2. vine killing device; 3. transporting device; 4. sweet potato ridge; 5. vine collecting box; 6. shield; 7. total mass sensor; and 8. DEM of sweet potato vine.

Figure 9.
Test on double-roller sweet potato vine crushing and collecting.

Figure 10.
Variation curve of vine picking rate with end inclination at different vine depths.

Figure 11.
Curve of qualified rate of broken sweet potato vines with the number of killing knifes.

Figure 12.
Variation curve of average particle velocity with time under different conveying inclination angles.
Figure 12.
Variation curve of average particle velocity with time under different conveying inclination angles.

Figure 13.
Variation curve of sweet potato vine harvest rate with conveying velocity under different conveying inclination angles.
Figure 13.
Variation curve of sweet potato vine harvest rate with conveying velocity under different conveying inclination angles.

Figure 14.
The influence of interaction factors on the response value.

Figure 15.
Field operation effect after optimization: (a) field conditions before and after working; (b) harvested sweet potato vines.
Figure 15.
Field operation effect after optimization: (a) field conditions before and after working; (b) harvested sweet potato vines.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Size parameters for a sweet potato ridge and vine during the harvest period.
| Parameter | Parameter Range | Mean |
|---|---|---|
| Top width of ridge/mm | 350.2~380.4 | 365.2 |
| Ridge height/mm | 151.3~170.2 | 160.4 |
| Ridge distance/mm | 876.5~900.9 | 899.3 |
| Bottom width of ridge/mm | 665.3~693.4 | 682.2 |
| Sweet potato vine length/mm | 1500~2000 | 1700 |
| Sweet potato vine diameter/mm | 5~7 | 6 |
| Sweet potato vine depth/mm | 30~100 | 60 |
Table 2.
Discrete element simulation parameter values.
| Simulation Parameters | Level |
|---|---|
| Stem density of sweet potato/(kg·m−3) | 998.91 |
| 45 steel density/(kg·m−3) | 7850 |
| Poisson’s ratio for sweet potato stem | 0.28 |
| 45 steel Poisson’s ratio | 0.3 |
| Shear modulus of sweet potato stem/MPa | 6 |
| Shear modulus of 45 steel/MPa | 70,000 |
| Collision recovery coefficient of sweet potato stem–sweet potato stem | 0.32 |
| Impact recovery coefficient of sweet potato stem−45 steel | 0.44 |
| The static friction coefficient of sweet potato stem–sweet potato stem | 0.41 |
| The static friction coefficient of sweet potato stem−45 steel | 0.7 |
| Rolling friction coefficient of sweet potato stem–sweet potato stem | 0.17 |
| Rolling friction coefficient of sweet potato stem−45 steel | 0.15 |
Table 3.
Test factors and coded values.
| Coded Values | Vine Picking Roller Velocity x1/(r·min−1) | Vine Killing Roller Velocity x2/ (r·min−1) | Ground Clearance x3/mm |
|---|---|---|---|
| −1 | 550 | 1600 | 5 |
| 0 | 675 | 1900 | 15 |
| 1 | 800 | 2200 | 25 |
Table 4.
Test scheme and results.
| Number | Test Factors | Response Value | ||||
|---|---|---|---|---|---|---|
| x1 | x2 | x3 | Y1/% | Y2/mm | Y3/% | |
| 1 | 0 | 0 | 0 | 93.5 | 30 | 0.16 |
| 2 | 0 | 0 | 0 | 94.1 | 32 | 0.15 |
| 3 | 1 | −1 | 0 | 89.5 | 46 | 0.13 |
| 4 | 0 | 0 | 0 | 92.3 | 27 | 0.18 |
| 5 | 0 | 0 | 0 | 94.4 | 25 | 0.17 |
| 6 | 1 | 1 | 0 | 94.9 | 30 | 0.28 |
| 7 | 0 | 0 | 0 | 94 | 28 | 0.16 |
| 8 | −1 | 1 | 0 | 90.8 | 35 | 0.2 |
| 9 | 1 | 0 | −1 | 95.2 | 22 | 0.33 |
| 10 | 0 | 1 | −1 | 93.2 | 20 | 0.36 |
| 11 | 0 | −1 | −1 | 91.4 | 29 | 0.31 |
| 12 | 0 | 1 | 1 | 91.7 | 41 | 0.14 |
| 13 | 0 | −1 | 1 | 90 | 45 | 0.02 |
| 14 | 1 | 0 | 1 | 93.1 | 43 | 0.11 |
| 15 | −1 | 0 | −1 | 92.5 | 30 | 0.32 |
| 16 | −1 | −1 | 0 | 89.5 | 46 | 0.13 |
| 17 | −1 | 0 | 1 | 90.6 | 54 | 0.05 |
Table 5.
Variance analysis of regression equation.
| Source of Variance | Y1 | Y2 | Y3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sum of Squares | Freedom | F Value | p Value | Sum of Squares | Sum of Squares | F Value | p Value | Sum of Squares | Freedom | F Value | p Value | |
| Model | 51.45 | 9 | 9.28 | 0.0039 ** | 1435.33 | 9 | 12.95 | 0.0014 ** | 0.16 | 9 | 135.18 | <0.0001 ** |
| x1 | 10.81 | 1 | 17.54 | 0.0041 ** | 72 | 1 | 5.85 | 0.0462 * | 2.81 × 10−3 | 1 | 22 | 0.0022 ** |
| x2 | 13 | 1 | 21.1 | 0.0025 ** | 200 | 1 | 16.24 | 0.005 ** | 0.019 | 1 | 148.7 | <0.0001 ** |
| x3 | 5.95 | 1 | 9.66 | 0.0171 * | 840.5 | 1 | 68.25 | <0.0001 ** | 0.13 | 1 | 977.65 | <0.0001 ** |
| x1x2 | 4.2 | 1 | 6.82 | 0.0349 * | 6.25 | 1 | 0.51 | 0.4993 | 1.60 × 10−3 | 1 | 12.51 | 0.0095 ** |
| x1x3 | 1.00 × 10−2 | 1 | 0.016 | 0.9022 | 2.25 | 1 | 0.18 | 0.6819 | 6.25 × 10−4 | 1 | 4.89 | 0.0627 |
| x2x3 | 2.50 × 10−3 | 1 | 4.06 × 10−3 | 0.951 | 6.25 | 1 | 0.51 | 0.4993 | 1.23 × 10−3 | 1 | 9.58 | 0.0174 * |
| x12 | 1.54 | 1 | 2.5 | 0.1578 | 216.76 | 1 | 17.6 | 0.0041 ** | 2.70 × 10−4 | 1 | 2.11 | 0.1899 |
| x22 | 14.88 | 1 | 24.14 | 0.0017 * | 56.87 | 1 | 4.62 | 0.0687 | 7.12 × 10−4 | 1 | 5.57 | 0.0504 |
| x32 | 0.18 | 1 | 0.29 | 0.6087 | 11.81 | 1 | 0.96 | 0.36 | 3.92 × 10−3 | 1 | 30.63 | 0.0009 ** |
| Residual | 4.31 | 7 | 86.2 | 7 | 8.95 × 10−4 | 7 | ||||||
| Lack of fit | 1.58 | 3 | 0.77 | 0.5669 | 57 | 3 | 2.6 | 0.1891 | 3.75 × 10−4 | 3 | 0.96 | 0.4924 |
| Lack of fit | 2.73 | 4 | 29.2 | 4 | 5.20 × 10−4 | 4 | ||||||
| Total | 55.77 | 16 | 1521.53 | 16 | 0.16 | 16 | ||||||
Note: p < 0.01 (extremely significant, **); p < 0.05 (significant, *).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Mu, G.; Wang, W.; Zhang, T.; Hu, L.; Zheng, W.; Zhang, W. Design and Experiment with a Double-Roller Sweet Potato Vine Harvester. Agriculture 2022, 12, 1559. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture12101559
AMA Style
Mu G, Wang W, Zhang T, Hu L, Zheng W, Zhang W. Design and Experiment with a Double-Roller Sweet Potato Vine Harvester. Agriculture. 2022; 12(10):1559. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture12101559
Chicago/Turabian StyleMu, Guizhi, Wanshuai Wang, Tingting Zhang, Lianglong Hu, Wenxiu Zheng, and Wanzhi Zhang. 2022. "Design and Experiment with a Double-Roller Sweet Potato Vine Harvester" Agriculture 12, no. 10: 1559. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture12101559
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.