
Design and Experiment of Dry-Farming Cantaloupe Transplanter under Water

1
Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing 210014, China
2
College of Mechanical and Electrical Engineering, Xinjiang Agricultural University, Urumqi 830052, China
*
Author to whom correspondence should be addressed.
Agriculture 2022, 12(6), 796; https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture12060796
Submission received: 6 April 2022
/
Revised: 26 May 2022
/
Accepted: 28 May 2022
/
Published: 31 May 2022
(This article belongs to the Special Issue Advances in Agricultural Engineering Technologies and Application)
Abstract
:To solve the problems of high temperature and drought in the Xinjiang Turpan area and the low survival rate of melon seedlings transplanted into dry soil, existing transplanters for large plant type young melon seedlings can be mechanized. For non-destructive planting for small plant types, such as Hami melon seedlings, there are still poor transplanting effects, planting point precise pile-soil, and other problems. In this study, a water transplanter for laying pipe and film for Hami melons was designed to mechanize the operation of rotating tillage, laying film and covering soil, transplanting potted seedlings on film, and water injection of the seedling root and planting hole, and soil piling and suppression. In this study, a transplanter was designed by coupling the motion of an earth-covering roller and a duck’s mouth planter and realized the precise mound of soil in the planting hole, solved the difficult problem of the precise mound of soil on the membrane, and at the same time carried out water injection on the root of the melon seedlings, which effectively solved the problem of low survival rate of transplanted seedlings in the arid region of Turpan, Xinjiang, China. Field experiments showed that the survival rate of melon seedlings under drip irrigation for 8 h after transplanting into dry soil exceeded 97%. The efficiency of mechanized operation can reach 1 mu/person/hour, which is more than 8 times higher than manual operation. The operation speed of the machine is 1~1.2 m/s, and the qualified transplanting rate is 93.26%, which meets the requirements of cantaloupe transplanting agronomy. This study provides a new method for dry soil cantaloupe transplanting. This article can also provide a design reference for Hami melon transplanting mechanization in arid areas.
1. Introduction
In recent years, China’s agricultural supply-side structural reform and industrial layout adjustment have caused the planting area of melons and vegetables to expand and the demand for mechanization to increase. At present, there are many vegetable transplanters for pepper, tomato, cabbage, and other vegetables for open ground transplanting and membrane transplanting [1,2]. Due to the large differences in geographical and climatic conditions, soil moisture, fertility, and melon and vegetable varieties grown in different areas in China, the planting and agronomic requirements are quite different in different areas. For example, in order to prevent and control the continuous cropping obstacles and soil-borne diseases of greenhouse melons and vegetables, liquid pesticides or microbial agents should be applied to the roots while transplanting. For melons and vegetables in arid northwestern areas, agricultural film covering and integrated water and fertilizer planting modes are generally adopted. A drip irrigation belt and agricultural film are spread, and then seedlings are transplanted. In order to avoid seedling dehydration and root heat injury caused by the high temperature of the sun at noon, it is necessary to pile soil at the planting hole. The drip irrigation system needs a unified water supply after transplanting in the whole planting area. For example, in a planting area of 50 mu, if each transplanter operates at 25 mu/day, it takes one day of work to complete the transplanting operation. After transplanting in the planting area, unified irrigation is bound to lead to a great reduction in the survival rate of transplanted seedlings. Irrigating the soil before transplanting can solve the problem of the time difference between transplanting and irrigation but, not only is it difficult for a tractor to work in the field under wet soil conditions, clay and soil accumulate on the duck’s mouth type planter that is currently used for membrane transplanting, and the transplanter can not operate normally. Therefore, for the mechanized transplanting of watermelon, melon, and other non-drought-resistant varieties in the seedling stage, it is necessary for seedlings to retain water to improve the survival rate.
Research on transplanting machines for bowl seedlings started earlier in Europe and America; therefore, the level of automation there is relatively high, and its level is relatively leading. Other supporting systems and technology are also relatively perfect. Most existing studies of mechanical vegetable transplanting are about semi-automatic mechanical planters, with fewer about fully automatic planters, which can plant each row in an average of 30–60 plants/min [1,2,3]. Research on dry land transplantation in China began in the 1960s; it started early but did not develop quickly [4,5,6,7]. China began to develop bare seedling transplanters in the 1970s, originally used for beet transplanting, then semi-automatic vegetable transplanters began to appear. The operation efficiency of the existing chain clip and seedling guide tube semi-automatic transplanter on the market is low, with a limit speed of manual sorting and seeding of 45 plants min−1 and 60 plants min−1. The highest transplanting rate of Ferrari Futura automatic hole plate seedling transplanting, representing the world’s most advanced level, is 133 times/(min line), but it is expensive and has strict requirements for seedling bed preparation. Existing vegetable transplanters are all single function; they cannot change according to different planting areas, different melon varieties or agronomic requirements, root precision fertilization or irrigation water, nor in the planting hole, transplanted seedlings’ low survival rate, and other serious problems. A transplanter must consider the soil adaptability, operation efficiency, and economy; therefore, current transplanters are not suited to Hami melon water injection transplanting [8,9].
In view of the above problems and to provide new technologies and methods that support the transplantation of cantaloupe in dry areas, in this study, a compound Hami melon transplanter is proposed. First, the front part of the machine rotates the soil, and then the pot seedlings are manually placed for transplanting. Finally, water is injected into the root of the transplanted seedlings to complete the transplanting operation. At the end of the article, the effect of the transplanting operation is verified by a field experiment, and the transplanting performance of the transplanter is evaluated.
2. Materials and Methods
2.1. Dryland Cantaloupe Watering Transplanter Whole Structure and Working Principle
2.1.1. Whole Structure
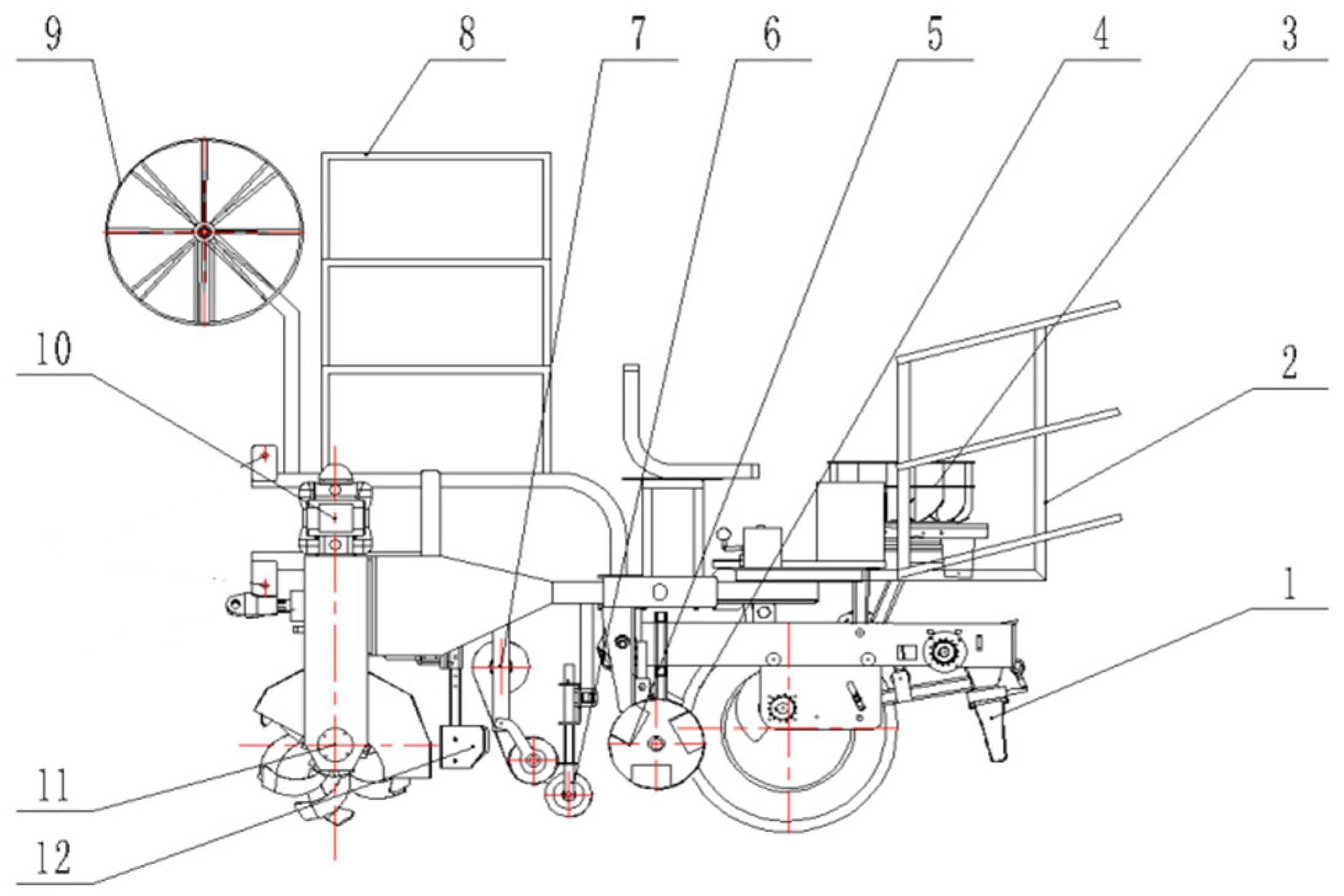
The dry land cantaloupe watering transplanter is mainly composed of rotary tillage parts, a transplanting apparatus, seedling plate, seedling feeding institutions, main transmission assembly, soil covering mechanism, film pressure mechanism, film mulching mechanism, water sitting system, and other components. The specific structure is shown in Figure 1. The whole transplanter is long, wide, and high (2300 mm × 1500 mm × 1700 mm). The rotary tillage parts, film and soil device, power box, and soil suppression mechanism are fixed through the beam in the front frame of the transplanter, and the length of the planting beam is 1500 mm. To stagger the space and prevent the interference of each part, the rotary tillage parts and power box are fixed and connected by vertical beams. The height of the fixed vertical beam is 650 mm, the soil covering ballast wheel is connected by U-bolt, and the lateral distance of the fixed seat is 900 mm. The imitation laminating device is fixed by fixed bolts and planted beams with a relative distance of 1700 mm.
2.1.2. Dryland Cantaloupe Watering Transplanter Whole Structure and Working Principle
Start the tractor, keep the tractor output speed of about 1000 r/min and advance at a constant speed. Before transplanting, conduct soil rotary tillage in front of the machine and then lay the film. The cantaloupe seedlings are removed from the plate when transplanting, and the bowl seedlings are placed into a circular cylinder feeding mechanism. The seedling feeding mechanism rotates slowly as the machine moves forward. The closed opening at the bottom of the cylinder opens when the cylinder feeding mechanism moves above the duck mouth planter. The bowl seedling falls by gravity from the cylinder into the cylinder mounted on the upper end of the duck beak, and the cantaloupe seedlings fall into the duckbilled transplanting apparatus through the receiver. After the duck mouth is inserted into the soil, the multibar drive mechanism turns the cam on the crank against the elbow, making the duck beak open, and the cantaloupe seedlings fall into the soil nest. At this time, open the water injection system. The root position of the transplanted seedlings is quantified at a fixed point, and water injection is not less than 50 mL so as to complete the transplanting work. The main working components of the transplanter are the rotary tillage mechanism, film laying mechanism, multi-rod drive mechanism, seedling feeding plate, duckbilled transplanting apparatus, and quantitative water injection system.
2.2. Planting Agronomic Requirements
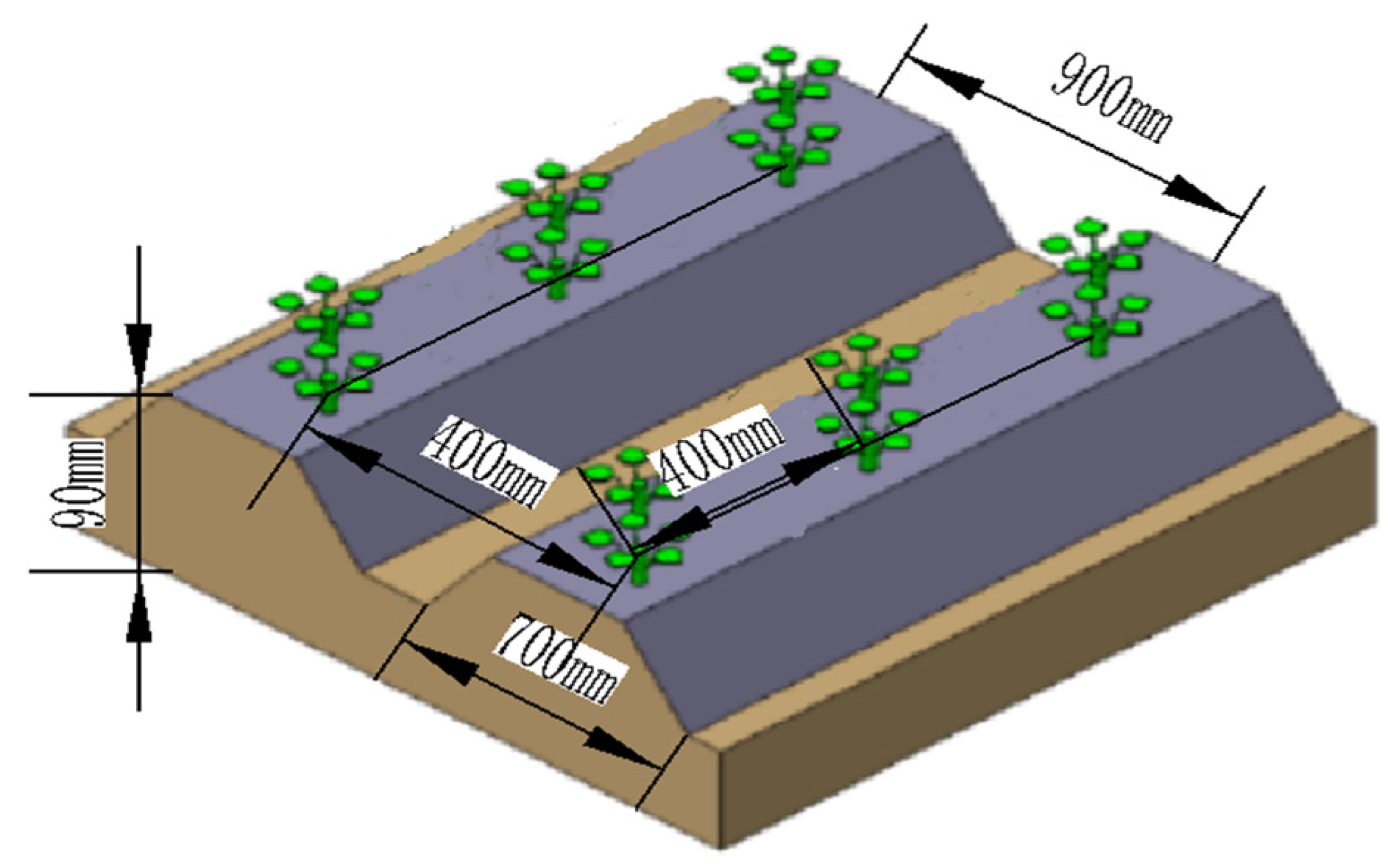
The planting mode of cantaloupe pipe laying and sitting water transplanting is shown in Figure 2. Ridge height was 90 mm, ridge width was 700 mm, array pitch and row spacing were 400 mm, and double transplanting and adjacent ridges center distance was 900 mm. A white mulch with 900 mm width and 0.012 mm thickness was used for each ridge. Dimensions are shown in Figure 2.
Along with the characteristics of double-row transplanting on the cantaloupe film, the main technical parameters of the machines and tools are shown in Table 1.
2.3. Design Analysis of Key Mechanisms
2.3.1. Rotary Tillage Parts
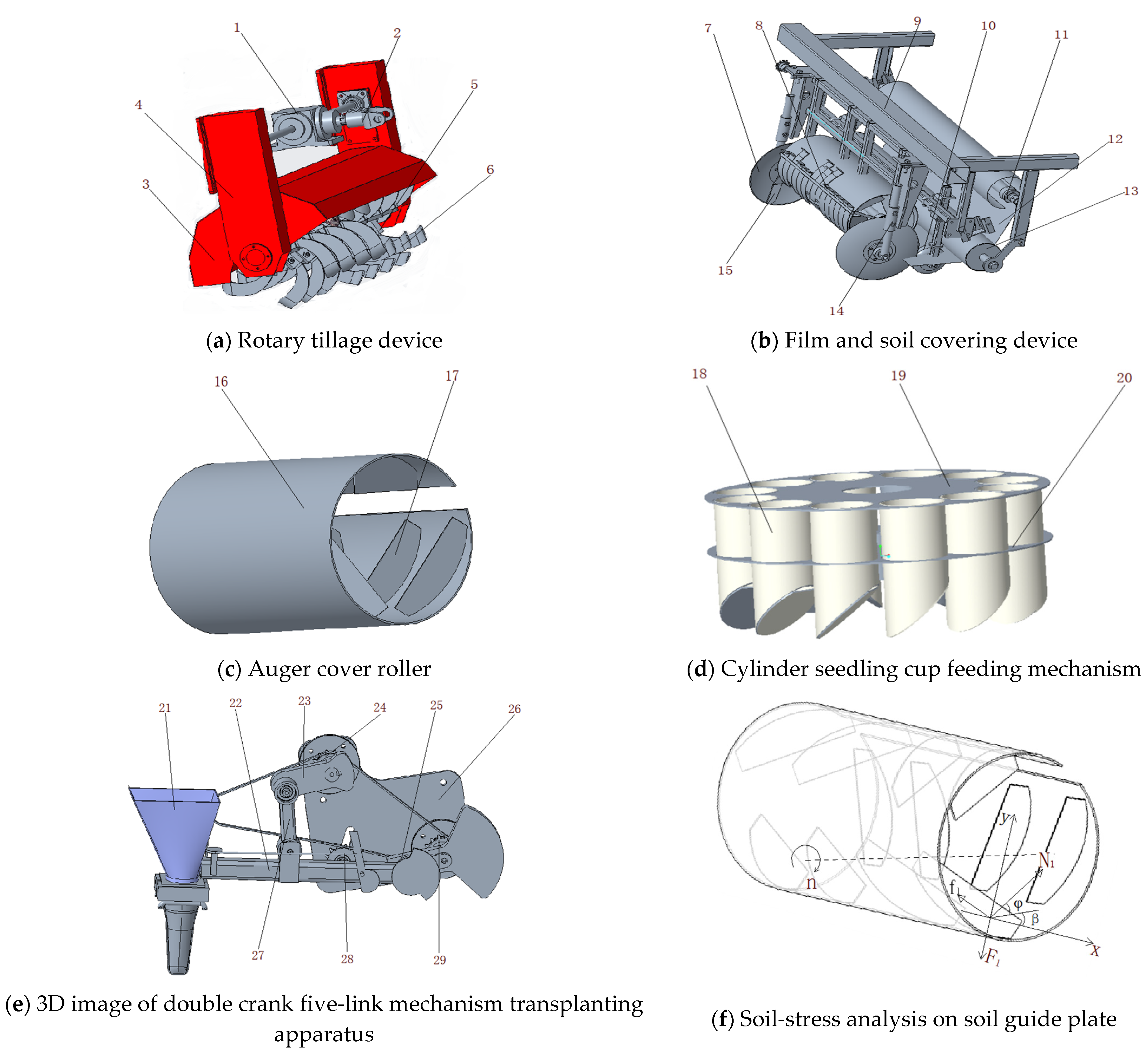
The rotary parts are mainly composed of a rotary blade shaft, blade, and knife plate. The structure is shown in Figure 3a. When working, the blade is driven by power and rotates along with the unit. The soil is cut in rotation and tossed, further hitting the retaining plate, breaking, and falling to the surface, and then is divided to both sides by the trench knife and the retaining plate. The initial design rotary radius is 220 mm; there are 14 knife plates, each with 3 rotary tiller knives, which are evenly arranged within 360 range on the knife plate, two lines of operation, 60 Mn for machine production materials [10,11,12,13].
2.3.2. Film Covering Soil Covering Mechanism
The design of the film-covering device takes into account the components, working environment, mechanical properties, and other factors and is designed and manufactured according to relevant standards. The coating device of dry cantaloupe water transplanting mainly consists of a soil-covered plate, auger cover roller, film roller, film-pressure wheel, installation support, guide plate, soil-retaining plate, and other components, as shown in Figure 3b above. In the device, the film rod and film roller suspension rack are cut from a 5 mm thick steel plate, and the film rod is 2 mm, respectively, seamless steel pipe of 28 mm diameter, the film roller suspension rack is 2 mm wall thickness, 48 mm diameter, 300 mm diameter. According to the study [14], we can know the angle between the soil-covered plate and the forward direction of the transplanter is 20°, the mounting tilt angle is 18°, and the soil cutting operation effect is good. The two plates covering the soil are designed to be 1.5 m apart; it is distributed in the position of the cylinder section covered by an auger cover roller. At this time, the depth of the cutting soil is 10 mm, and the design parameters of the soil-covered plate meet the operation requirements of the melon water transplanter. The mulch is installed on the film rod during work, and the film spreading roll spreads the mulch on the ridge auger cover roller will cover the film with soil, round soil mulching plate on the film side, so as to complete the film mulching operation [10].
According to the static analysis of the auger cover roller, as shown in Figure 3c, when the transplanter is in use, the auger cover roller’s rotation speed is relatively low, and the centrifugal force is small, so the influence of the centrifugal force can be ignored in the analytical mechanics. The force of the soil on the guide plate in a critical sliding state at a certain point on the helical surface is shown in Figure 3f. The force balance equation is obtained based on the soil mechanics [10]:
In the formula: 0—Friction angle between soil and guide plate, °
—Tting angle of the membrane, °;
—The ical angle of the guide plate, °;
FN—Support force of soil guide plate to soil, N;
—Friction force of soil guide plate on soil, N;
F—The gravity of the soil itself and the circumferential tangential force under the surrounding soil extrusion pressure, N;
When the auger cover roller rotates, the higher the rotation speed, the greater the amount of soil is transported. According to the literature study in [11,12,13,14,15], the differential equation of soil motion is as follows [12,13,14]:
In the formula: m—soil quality, kg;
a—Acceleration of the axial movement of the soil along the guide plate, m/s2;
Thus, to get the soil acceleration:
It can be seen that when the diameter and speed of the auger cover roller are certain, the function of helical angle analyzes the influence of helical angle on soil acceleration, and seeks the maximum value.
So that:
Thus obtain the spiral angle when the acceleration of soil movement along the roller is maximum:
Therefore, the working surface of the guide plate meets the surface axial conveying soil near the coil. The auger cover roller diameter is 350 mm, and the number of uniformly distributed circumferential soil-guide plates is 4, the 3 rows of guide plates are evenly arranged, the spiral angle of the guide plate is 15~25 degrees, the installation distance between the retaining plate and the roller is 30 mm. When the installation angle is 30 degrees, it can meet the requirements of cantaloupe cover film transplanting.
2.3.3. Design of the Cylinder Seedling Feeding Mechanism
The seedling feeding mechanism not only carries the cantaloupe seedlings but also is the key part of determining whether the melon seedlings can be successfully put into the duck mouth of the planter. Therefore, the seedling feeding mechanism is an important part of determining the final transplanting quality. The design of the feeding mechanism, including the seedling cup, turntable plate, seedling cup bracket, reducer, and installation base, are shown in Figure 3d. When the transplanting work begins, the feeding mechanism is powered by the reducer drive rotary wheel, which drives the seedling cup rotation. The operator is responsible for placing the cantaloupe seedlings into the seedling cup. When the seedling cup turns to the designated position under the open end cover, cantaloupe seedlings fall under gravity into the duck mouth planter [16,17,18].
The rotation speed of the seedling cup and the planter need to match each other to make the cantaloupe seedlings fall into the duck mouth smoothly; therefore, it is necessary to determine the speed of the cup and conduct a kinematic analysis of the transmission part of the rotating cup. When the planter reaches the guide tube position, the bottom end cover of the cup is opened; therefore, the rotation speed of the cup is:
In the formula: —Represents the angular speed of the seedlings cup, rad s−1;
—It indicates the angular displacement of the seedling cup rotation, rad;
T—Time of transplanting two adjacent melon seedlings, s;
Considering the spatial layout of the planting device, the number of seedling cups designed for the seedling feeding device is 12, the angular displacement of the adjacent seedling cup is , it takes 0.9 s and 1.5 s, respectively, to rotate the cup by angle according to the speed of transplanting operation. Calculated according to the above formula, the speed of the cup rotation is 0.58 rad s−1, 0.35 rad s−1.
2.3.4. Design of the Double Crank Five-Link Mechanism Transplanting Apparatus
The transplanting apparatus is the core component of the transplanter. The transplanting mechanism designed in this paper is the double crank five-link mechanism. The three-dimensional diagram of the transplanting apparatus is shown in Figure 3e. When the transplanter is working, all the rods of the transplanting apparatus should be coordinated, and the planting depth and standard spacing of the seedlings should be unified. To avoid the phenomenon of seedlings being injured, seedlings are clamped and seedlings taken away [19,20,21,22,23,24]. Because the duckbilled transplanting apparatus is driven by the crank of the planting mechanism, the transmission ratio of the power conveying device is:
In the formula: i—Transmission box reducer reduction ratio;
z1, z2—Number of teeth of the sprockets in the transplanting apparatus drive system;
n1, n2—Power speed of the seedling mechanism and crank speed of the plan 1, r/min.
The crank angle speed depends on the transplanting operation speed of 4.8 rad s−1, take the power speed (seedling cup speed) of the seedling delivery mechanism 0.58 rad s−1, select iω generally take 10: 1 dwelling rod reducer. Transmission ratio of the transplanting apparatus chain drive according to the above data is 0.12, the number of sprocket teeth was assigned to obtain the sprocket data: z2 = 15, z1 = 18.
2.4. Field Testing
2.4.1. Test Place and Test Instrument
A field test was conducted at the Hami Cantaloupe Research Center in Turpan, Xinjiang Uygur Autonomous Region, China, in March 2021. Test instruments included steel tape ruler, angle ruler, stopwatch, etc. According to the agronomic conditions of melon transplanting, the working parameters of the transplanter were set to match the suitable planting distance and planting row distance. In this test, the plant distance of melon was 35 cm, and the planting row distance was 40 cm. The transplanter working test is shown in Figure 4a, and the transplanting effect diagram is shown in Figure 4b.
2.4.2. Testing Methods
The dry-farming cantaloupe transplanter belongs to a dry land transplanting technology and method. Therefore, refer to JB/T10291 <transplanter in dry land> and manufacturer’s standard Q/HY·J 0324—2019 <Melo transplanter>, and use the relevant provisions of the test method [19,20,21,22].
The experiment was conducted during the melon planting period, and the influence of transplanter operation speed on repeat transplanting rate, lodging rate, missing transplanting rate, injury seedling rate, and transplanting qualified rate were analyzed [23,24,25,26]. The corresponding index detection methods are shown as follows:
(1) Repeat transplanting rate
In theory, one cantaloupe seedling should be transplanted, and two or more seedlings should actually be planted, and the proportion of NCZ and N of the repeat planting rate is:
In the formula: D—repeat transplanting rate, %.
Ncz—repeat transplanting point number, number.
N—The total number of points determined, number.
(2) Seedling lodging rate
After transplanting, the angle between the main seedling’s diameter and the ground is less than 30° [27], the proportion of the total number of lodging and the total number of holes N, the lodging rate was calculated as:
In the formula: T—Lodge rate, %.
NDF—Lodge point number, number.
(3) Missing transplanting rate
After the transplanting work was done, near the transplanting two-hole distance (Xi) and theory hole distance (Xr), we can, on the basis of the relationship between them, determine the number of missed transplanting holes when:
Range 0 ≤ Xi ≤ 0.5 Xr, plant one again;
0.5 Xr ≤ Xi ≤ 1.5 Xr, within the range are qualified hole distance;
Range 1.5 Xr ≤ Xi ≤ 2.5 Xr, one missing transplant was planted;
Range 2.5 Xr ≤ Xi ≤ 3.5 Xr, two missing transplants were planted;
Range 3.5 Xr ≤ Xi ≤ 4.5 Xr, two missing transplants were planted, and so on.
Missing planting rate calculation formula:
In the formula: NLZ—The number of missing holes, hole.
M—Missing planting rate,%.
(4) Injury seedling rate
If a transplanted melon seedling is damaged and its growth is affected, the seedling is defined as a wounded seedling. The ratio of the number of injured seedlings to the total number of measured holes in a planting row is the wound seedling rate [28]; the calculation formula is:
In the formula: NSM—number of injury seedlings, hole.
W—injury seeding rate, %.
(5) Transplant qualified rate
Within a test interval, seedling transplanting hole has more than one plant in line with (3) in the planting of qualified hole distance provisions, it is qualified for planting [29].
The qualified rate of planting is equal to the ratio of the number of qualified holes to the total number of holes in the test area; the calculation formula is as follows: (NHG = N − (2 NCZ + NDF + NLZ + NSM))
3. Results and Discussion
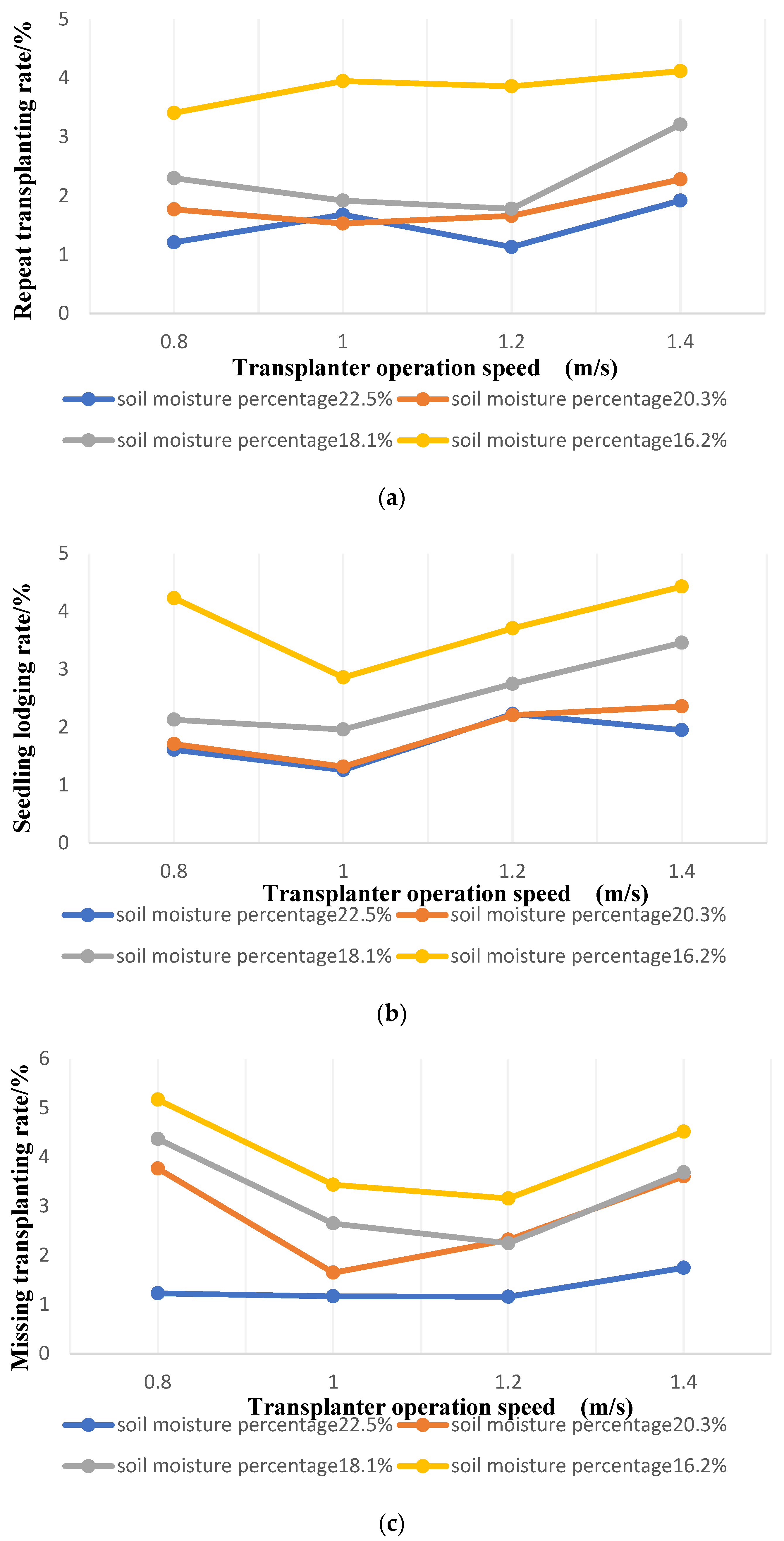
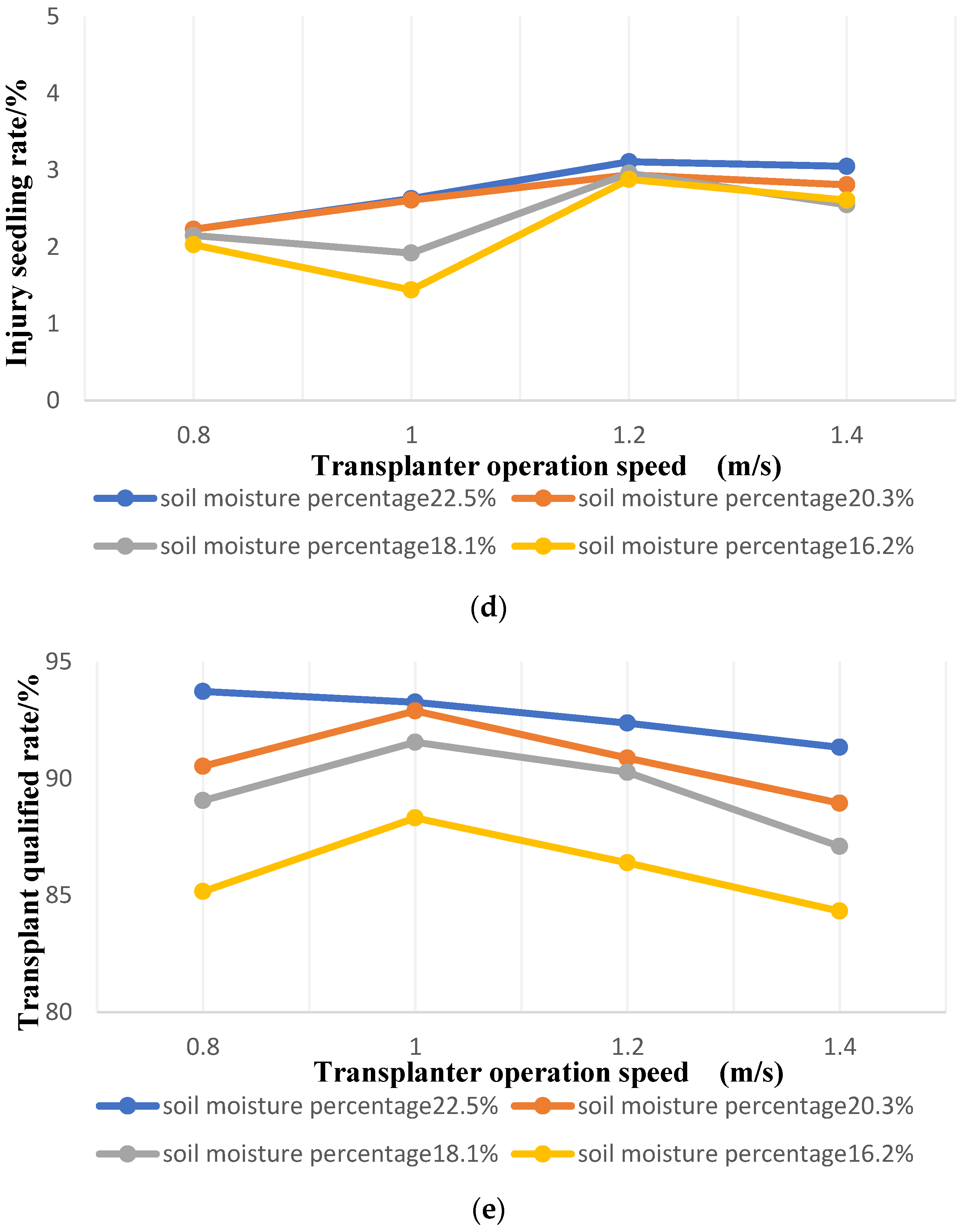
The land lots with different moisture content were selected for the test (22.5%, 20.3%, 18.1%, 16.2%). At the beginning of the transplanting test, the machines transplanted at a 0.8 m/s, 1 m/s, 1.2 m/s, 1.4 m/s operation speed, repeat transplanting rate, lodging rate, missing transplanting rate, and injury seedling rate were determined, respectively, and the transplant qualified rate was calculated. The specific test data table is shown in Figure 5a–e.
Univariate analysis was performed based on the data from the field experiments. The analysis result is shown in Figure 5a–e. In the dry land soil with a moisture content of 18.1~22.5%, the operation and machine speed increases, the rate of injured seedlings and lodging increases, the repeat planting rate and leakage planting are first smaller and larger, and the qualified rate of transplanting showed a downward trend. When the machine speed is at 1 m/s, the plant leakage rate and the seedling injury rate are the lowest. At this time, the transplanting qualified rate is the largest, 93.26%; this time is the optimal level.
Through the experimental analysis and verification of the design of the planting mechanism, some suggestions are put forward for the key content for further research and development.
The following proposals: Although the transplanting qualification rate of planting institutions has reached the national standard, there is still much room for improvement, which should be improved in the next step. The lack of a data statistical analysis study is a deficiency of this paper. Furthermore, optimization should consider the application and improvement of institutions in field use under different terrain conditions in order to enhance the adaptability of the machine.
For increased adaptability and interchangeability, improve the utilization rate of the machine and realize multi-purposes of one machine. In the design, attention should also be paid to matching sets such as hole digging and water injection development.
4. Conclusions
This study proposed a non-damaging transplanting technology for cantaloupe based on a multi-step operation with a transplanter. The technology was developed for the non-destructive transplanting of cantaloupe seedlings, planting point precise pile-soil, respectively. Firstly, through the design of a double crank five-link mechanism transplanting apparatus, the nondestructive transplanting of Hami melon seedlings was guaranteed. Then, through the motion coupling design of the auger cover roller and duckbilled transplanting apparatus, precise piling of soil in the transplanting hole was realized.
In this article, the design of the transplanting technology and planting hole stacking technology of the machine effectively solve the technical problem of mechanized Hami melon transplanting in high temperature and arid climate conditions in Turpan, Xinjiang Uygur Autonomous Region, China. It could also provide guidance for the mechanization of transplanting operations in dry areas around the world. The experimental data show that the survival rate of cantaloupe seedlings treated with drip irrigation at 8 h after dry land transplanting exceeded 97%. In dry land transplanting, water should be given to seedlings to ensure their survival rate. Mechanized operation efficiency is up to 1 mu/people/h, more than 8 times higher than the manual operation. The implement’s travel speed is 1–1.2 m/s, and the transplant qualified rate is 93.26%; therefore, this technique meets the agronomic requirements of cantaloupe transplanting.
Author Contributions
Conceptualization, D.L. and Y.G.; methodology, X.C. and X.Z. (Xiao Zhang); software, G.W.; validation, D.L., X.C. and G.W.; formal analysis, Y.G.; investigation, D.L.; data curation, G.W.; writing—original draft preparation, D.L.; writing—review and editing, D.L.; supervision, X.Z. (Xuejun Zhang) and Y.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the National Key Research and Development Programme of China (2020YFD1000300), the Central Public-interest Scientific Institution Basal Research Fund (S202110-02), and the China Agriculture Research System (Grant No. CARS-25).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The datasets used and/or analyzed during the current study are available from the corresponding author on reasonable request.
Conflicts of Interest
The authors declare no conflict to interest.
References
- Gutiérrez, C.; Serwatowski, R.; Gracia, C.; Cabrera, J.M.; Saldana, N. Design building and testing of a transplanting mechanism for strawberry plants of bare root on mulched soil. Span. J. Agric. Res. 2009, 7, 791–799. [Google Scholar] [CrossRef] [Green Version]
- Satpathy, S.K.; Garg, I.K. Effect of Selected Parameters on the Performance of a Semi-automatic Vegetable Transplanter. Ama Agric. Mech. Asia Afr. Lat. Am. 2008, 39, 47–51. [Google Scholar]
- Kumar, G.V.P.; Raheman, H. Automatic feeding mechanism of a vegetable transplanter. Int. J. Agric. Biol. Eng. 2012, 5, 20–27. [Google Scholar]
- Gao, Q.S.; Chen, Y.S.; Guan, C.S.; Yang, Y.T.; Guan, Z.C. Mechanized transplanting in open field. J. China Agric. Mech. 2021, 42, 193–197. [Google Scholar]
- Chen, Y.S. 2018 development report on mechanized production of vegetables in China. J. China Agric. Mech. 2019, 40, 1–6. [Google Scholar]
- Zhao, X.W.; Guo, H.; Zhang, J.; Yang, W.Z.; Han, C.J. The status quo and development trend of dryland transplanter in Xinjiang. Xinjiang Rural. Mech. 2014, 4, 25–29. [Google Scholar]
- Lu, Y.T.; Li, Y.X.; Liu, Y.; Li, B.; Wang, T. Analysis on the status quo of transplanting machines and transplanting technology at home and abroad. Xinjiang Rural. Mech. 2011, 3, 29–32. [Google Scholar]
- Yu, X.X.; Zhao, Y.; Chen, B.C.; Zhou, M.L.; Zhang, H.; Zhang, Z.C. Development status and prospects of transplanting machinery. J. Agric. Mach. 2014, 45, 44–53. [Google Scholar]
- Liu, C.X.; Li, X.H.; Yue, X.M.; Zhao, H.Y. The status quo and development trend of dryland transplanters in my country. J. Agric. Mech. Res. 2013, 34, 249–252. [Google Scholar]
- Wu, W.; Sun, S.L.; Xiao, M.T. The status quo and development trend of transplanting machinery in my country. Agric. Technol. Equip. 2013, 12, 7–8. [Google Scholar]
- Lu, Z.J.; Shan, Y.Y.; Wang, J.; Zhao, J. Research status of vegetable transplanting equipment and prospects of pot seedling transplanting equipment. J. China Agric. Mech. 2017, 38, 30–34. [Google Scholar]
- Xue, D.Q.; Hou, S.L.; Zhang, J.X. Research progress and development trend of dryland transplanting machinery in my country. J. China Agric. Mech. 2013, 34, 8–11. [Google Scholar] [CrossRef]
- Cui, Z.C.; Guan, C.S.; Yang, Y.T.; Gao, Q.S.; Chen, Y.S.; Xiao, T.Q. Research status of vegetable mechanical transplanting technology and equiment. J. China Agric. Mech. 2020, 41, 85–92. [Google Scholar]
- Xu, G.W. Research on the Key Components of the Double-Row Salvia Transplanter on a Large Ridge Film and the Design of the Whole Machine. Master’s Thesis, Northeast Agricultural University, Haerbin, China, 2019. [Google Scholar]
- Li, H.; Cao, W.B.; Li, S.F.; Liu, J.D.; Chen, B.B.; Ma, X.X. Development of 2ZXM-2 fully automatic vegetable plug seedling film-laying transplanter(2ZXM-2). Trans. Chin. Soc. Agric. Eng. 2017, 33, 23–33. [Google Scholar]
- Li, G.; Li, A.; Ha, S.M.; Kang, X.S.; Yu, G.H.; Zhang, G.F. Parameter optimization of the spiral cover drum of the film planter. Trans. Chin. Soc. Agric. Eng. 2003, 19, 135–138. [Google Scholar]
- Tang, Q.; Wu, C.Y.; Yuan, W.S.; Wu, J.; Wang, S.F. Structural design of soil-covering suppression device for rape blanket seedling high-speed transplanter. Chin. J. Agric. Mach. Chem. 2016, 37, 20–22. [Google Scholar]
- Jin, L.Y. Design and Experiment of Planting Mechanism of Pepper Pot Transplanting Machine. Master’s Thesis, Heilongjiang Bayi Agricultural University, Daqing, China, 2021. [Google Scholar]
- Wu, J.; Tang, Q.; Yuan, W.S.; Wang, S.F.; Wu, C.Y. Design and parameter optimization of ditching and suppression components of rapeseed blanket seedling transplanter. China J. Agric. Eng. 2016, 32, 46–53. [Google Scholar]
- Wu, J.; Yu, W.; Zhang, M.; Wu, C.Y.; Jiang, L.; Tang, Q. Design and test of Z Y-6. J. Agric. Mach. 2012, 51, 95–103. [Google Scholar]
- Wang, Y.W.; He, C.L.; Wang, J.; Wu, C.Y.; Yu, G.H.; Tang, Y.H. Dryland vegetable bowl seedlings automatic transplanting machine planting Performance test. J. Agric. Eng. 2018, 34, 19–25. [Google Scholar]
- JB/T 10291-2013; Ministry of Industry and Information Technology of the PRC Republic of China. Dryland Planting Machinery. Machinery Industry Publishing House: Beijing, China, 2014.
- Jin, X.; Ji, J.T.; Liu, W.X.; He, Y.K.; Du, X.W. Structural optimization of duckbilled transplanter based on dynamic model of pot seedling movement. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2018, 34, 58–67. [Google Scholar]
- Chen, J.N.; Xia, X.D.; Wang, Y.; Yan, J.J.; Zhang, P.H. Motion differential equations of seedling in duckbilled planting nozzle and its application experiment. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2015, 31, 31–39. [Google Scholar]
- Shao, Y.Y.; Liu, Y.; Xuan, G.T.; Gao, X.M.; Han, X.; Wang, Y.X. Design and simulation analysis of multi-function duck mouth vegetable transplanting machine. Chin. Agric. Mech. 2019, 40, 9–12 and 34. [Google Scholar]
- Xu, G.W.; Song, Y.M.; Chu, R.X.; Jian, S.C.; Qiu, X.Y.; Gao, Q. Dynamic Optimization design and experiment of five-bar salvia miltiorrhiza transplanting Mechanism with counterweight. Chin. Agric. Mech. 2022, 42, 15–21. [Google Scholar]
- Zhang, X.L.; Wu, D.L.; Wu, C.Y. Design and experimental study of duck-mouth bowl seedling transplanting machine. Agric. Mech. Res. 2017, 3, 134–143. [Google Scholar]
- Bao, X.; Zhao, X.; He, J.; Li, H.W.; Wang, Q.J.; Liu, W.Z. Design and performance test of plowing and rotary tillage combined machine. INMATEH-Agric. Eng. 2020, 60, 213–222. [Google Scholar]
- Hu, M.J.; Zhang, W.Y.; Ji, Y.; Qi, B.; Xia, Q.Q.; Li, K. Effects of pepper transplanting with degradable bowls on seedling growth and development traits. J. Chin. Agric. Mech. 2020, 41, 57–62. [Google Scholar] [CrossRef]
Figure 1.
Dryland Cantaloupe Transplanter Under water. 1. Duck-billed transplanting apparatus; 2. The front of the seedling plate; 3. Cylinder seedling cup feeding mechanism; 4. gearset; 5. Cooling mechanism; 6. Pressure film mechanism; 7. Membrane overlying mechanism; 8. Behind the seedling plate; 9. Pipe laying parts; 10. Sitting water system; 11. Rotary tillage parts; 12. Open ditch parts.
Figure 1.
Dryland Cantaloupe Transplanter Under water. 1. Duck-billed transplanting apparatus; 2. The front of the seedling plate; 3. Cylinder seedling cup feeding mechanism; 4. gearset; 5. Cooling mechanism; 6. Pressure film mechanism; 7. Membrane overlying mechanism; 8. Behind the seedling plate; 9. Pipe laying parts; 10. Sitting water system; 11. Rotary tillage parts; 12. Open ditch parts.

Figure 2.
Ridging mode of double-row transplanting on cantaloupe film.

Figure 3.
Key mechanisms of the transplanter. 1. Transmission case; 2. Power transmission shaft; 3. Trim shell of rotary tillage device; 4. Transmission housing; 5. Rotary blade shaft; 6. Rotary blade; 7. soil-covered plate; 8. Auger cover roller; 9. The shelf of film and soil covering device; 10. Film-pressure wheel; 11. Film roller suspension rack; 12. Film; 13. Film roller; 14. Installation support; 15. Soil-retaining plate; 16. The shell of auger cover roller; 17. Soil guide plate; 18. Seedlings cup; 19. Turntable plate; 20. Seedlings cup bracket; 21. Duckbilled transplanting apparatus; 22. Coupler-1; 23. Crank-1; 24. Gear-1; 25. Crank-2; 26. Connection plate; 27. Coupler-2; 28. Gear-2; 29. Gear-3.
Figure 3.
Key mechanisms of the transplanter. 1. Transmission case; 2. Power transmission shaft; 3. Trim shell of rotary tillage device; 4. Transmission housing; 5. Rotary blade shaft; 6. Rotary blade; 7. soil-covered plate; 8. Auger cover roller; 9. The shelf of film and soil covering device; 10. Film-pressure wheel; 11. Film roller suspension rack; 12. Film; 13. Film roller; 14. Installation support; 15. Soil-retaining plate; 16. The shell of auger cover roller; 17. Soil guide plate; 18. Seedlings cup; 19. Turntable plate; 20. Seedlings cup bracket; 21. Duckbilled transplanting apparatus; 22. Coupler-1; 23. Crank-1; 24. Gear-1; 25. Crank-2; 26. Connection plate; 27. Coupler-2; 28. Gear-2; 29. Gear-3.

Figure 4.
Field testing site. (a) Transplanter working test site. (b) The effect of transplanting cantaloupe.
Figure 4.
Field testing site. (a) Transplanter working test site. (b) The effect of transplanting cantaloupe.

Figure 5.
Graph of transplanting effect at different working speeds. (a) Line chart of repeat transplanting rate changes under different operating speeds. (b) Line chart of seedling lodging rate changes under different operating speeds. (c) Line chart of the change of the missing transplanting rate under different operating speeds. (d) Line chart of the change of seedling injury seedling rate under different operating speeds. (e) Line chart of the change of transplanting qualification rate under different operating speeds.
Figure 5.
Graph of transplanting effect at different working speeds. (a) Line chart of repeat transplanting rate changes under different operating speeds. (b) Line chart of seedling lodging rate changes under different operating speeds. (c) Line chart of the change of the missing transplanting rate under different operating speeds. (d) Line chart of the change of seedling injury seedling rate under different operating speeds. (e) Line chart of the change of transplanting qualification rate under different operating speeds.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Transplanting machine technical parameter table.
| Project | Technical Parameters |
|---|---|
| Hang way | Tractor traction type |
| Supporting power (Metric horsepower) | ≥50 |
| Plant (hole) distance (tunable, mm) | 300, 350, 400, 450 |
| array pitch; row pitch (mm) | (Double row transplanting) 400 |
| Adapt to membrane width(cm) | 80–100 |
| water injection rate (mL/hole) | 50–100 |
| Outline dimension (length × width × height: mm) | 2300 × 1500 × 1700 |
| Complete machine quality (kg) | About 760 kg |
| Number of operators (including tractor driver) | 3 |
| Leakage rate (%) | ≤4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Liu, D.; Gong, Y.; Zhang, X.; Chen, X.; Wang, G.; Zhang, X. Design and Experiment of Dry-Farming Cantaloupe Transplanter under Water. Agriculture 2022, 12, 796. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture12060796
AMA Style
Liu D, Gong Y, Zhang X, Chen X, Wang G, Zhang X. Design and Experiment of Dry-Farming Cantaloupe Transplanter under Water. Agriculture. 2022; 12(6):796. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture12060796
Chicago/Turabian StyleLiu, Dejiang, Yan Gong, Xuejun Zhang, Xiao Chen, Guo Wang, and Xiao Zhang. 2022. "Design and Experiment of Dry-Farming Cantaloupe Transplanter under Water" Agriculture 12, no. 6: 796. https://0-doi-org.brum.beds.ac.uk/10.3390/agriculture12060796
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.