Two-Dimensional Jamming Recognition Algorithm Based on the Sevcik Fractal Dimension and Energy Concentration Property for UAV Frequency Hopping Systems

Abstract
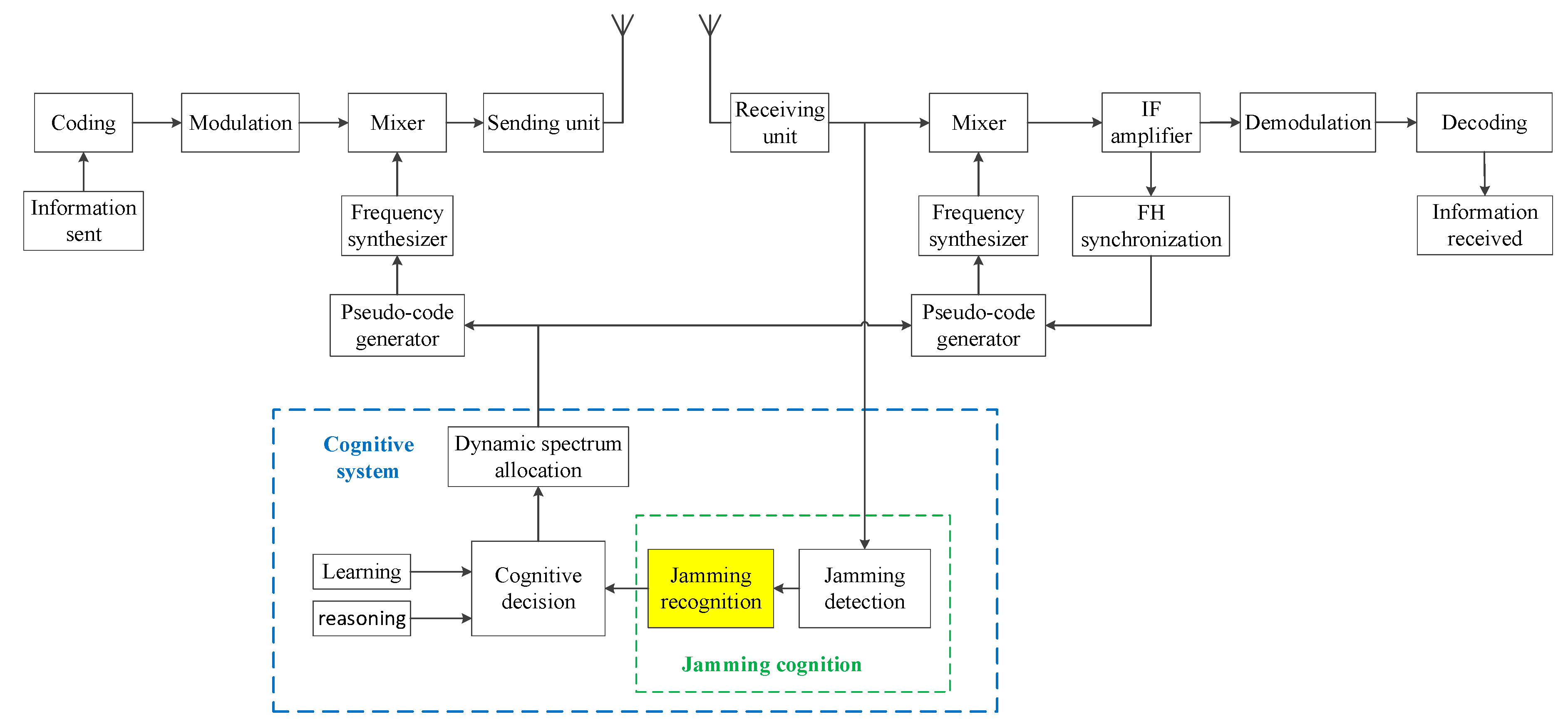
:1. Introduction
2. Jamming Signal Model
2.1. BNJ
2.2. NNJ
2.3. STJ
2.4. MTJ
2.5. PJ
2.6. LFM
3. Feature Extraction
3.1. Sevcik Fractal Dimension in Frequency
3.2. Degree of Energy Concentration in Fractional Fourier Transform Domain
4. Jamming Recognition Algorithm Based on Two-Dimensional Features
4.1. SVM Classifier Design
- (1)
- Direct method: This method is directly modified on the objective function, and the parameter solution of multiple classification surfaces is merged into an optimization problem. Then, the optimization problem is solved “one-time” to achieve multi-class classification. This method seems simple, but its computational complexity is relatively high, and it is difficult to implement. Thus, it is only suitable for small problems.
- (2)
- Indirect method: This method is used to realize the construction of multiple classifiers by combining multiple two classifiers. The more common methods now include the one-to-one method, the one-to-many method, and BT-SVM.
4.2. Jamming Recognition Process
- The received signal takes the DFT and calculates its normalized spectrum. Equations (13), (16), and (17) are used to obtain the SFDF, which is used as a characteristic parameter of different jamming patterns.
- Equations (19) and (20) are used to calculate , which is used as another characteristic parameter of different jamming patterns.
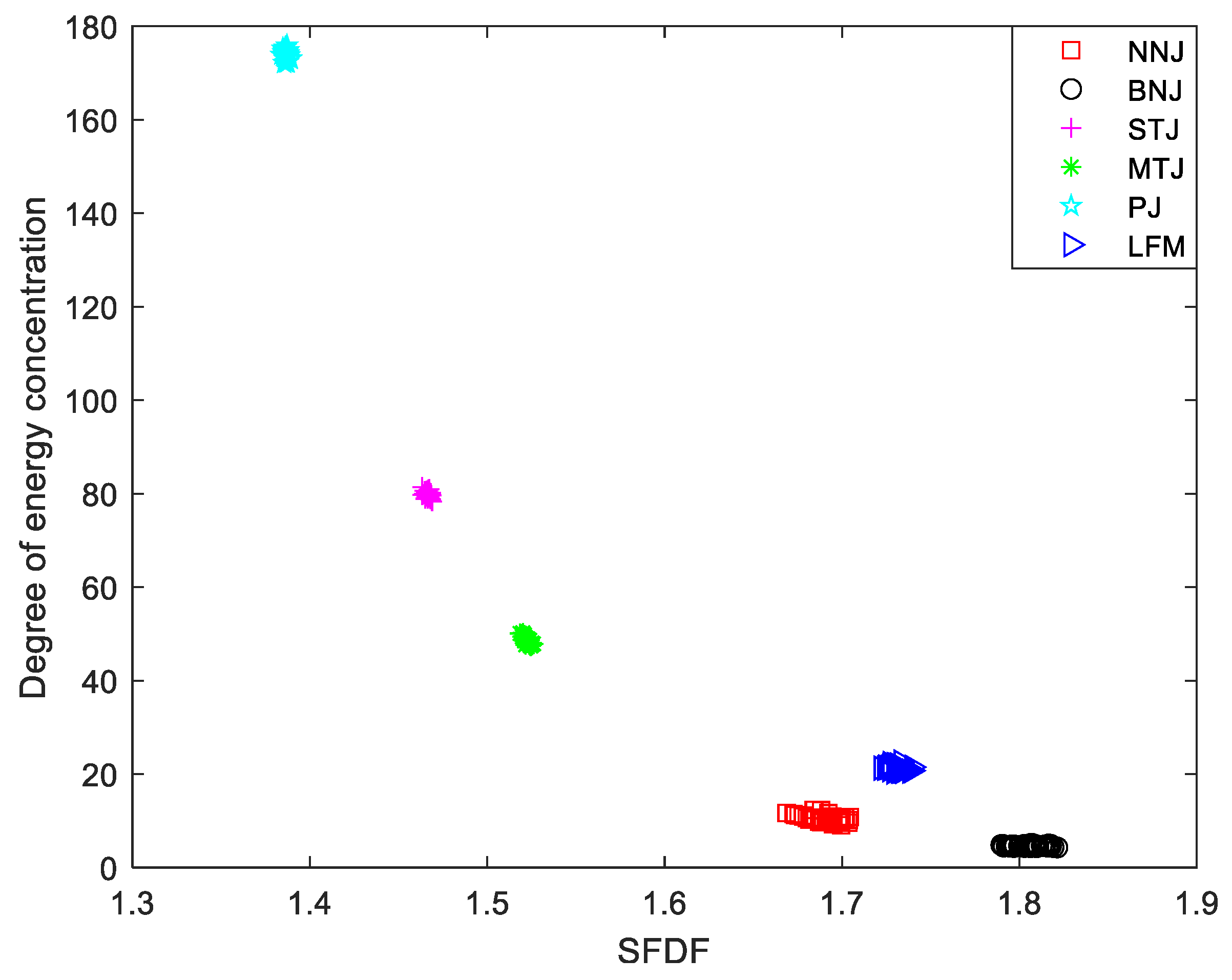
- Two-dimensional feature vectors are constructed with different jamming patterns.
- The two-dimensional feature vector with different jamming patterns is used as a sample to establish the SVM classifier, and then the BT-SVM classifier is used for classification.
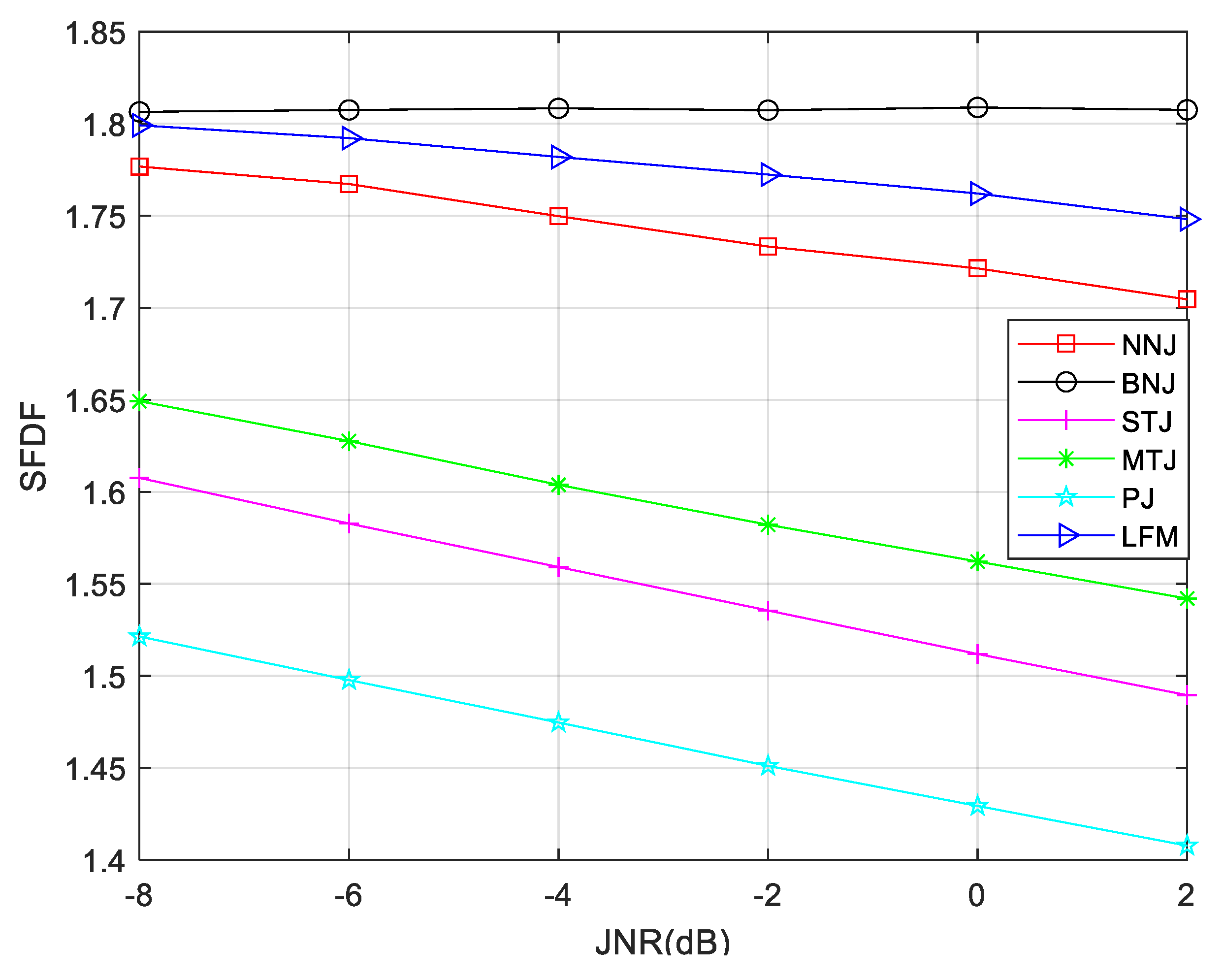
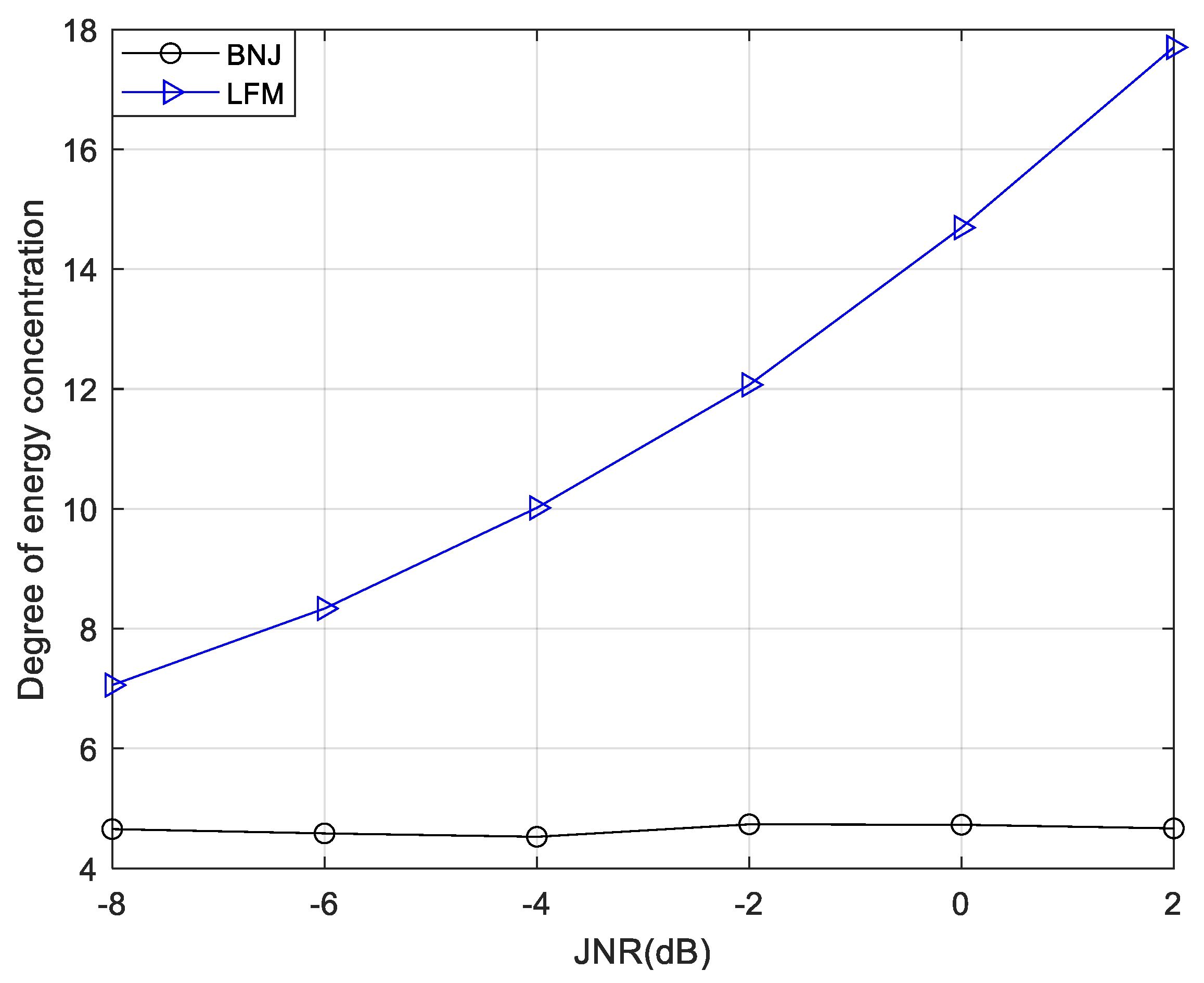
5. Simulation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pazmiño, W.M.; Olmedo, A.J.; Redrován, D.V. Analysis and determination of minimum requirements for a data link communication system for unmanned aerial vehicles-UAV’s. In Proceedings of the 2016 IEEE Ecuador Technical Chapters Meeting (ETCM), Guayaquil, Ecuador, 12–14 October 2016; pp. 1–6. [Google Scholar]
- Li, Y.C.; Wang, G.H.; Sun, D.X.; Guan, C. Technique against self-protection repeating track false-target deceptive jamming for radar. J. Syst. Eng. Electron. 2015, 37, 1242–1248. [Google Scholar] [CrossRef]
- Jung, H.; Van Nguyen, B.; Song, I.; Kim, K. Design of Anti-Jamming Waveforms for Time-Hopping Spread Spectrum Systems in Tone Jamming Environments. IEEE Trans. Veh. Technol. 2020, 69, 728–737. [Google Scholar] [CrossRef]
- Zhou, B.; Kong, D.; Geng, H.; Dai, H.; Wang, J. A Design of Cognitive Anti-jamming System in Complex Environment. In Proceedings of the 2019 Cross Strait Quad-Regional Radio Science and Wireless Technology Conference (CSQRWC), Taiyuan, China, 18–19 July 2019; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2019; pp. 1–3. [Google Scholar]
- Mitola, J.; Maguire, G. Cognitive radio: Making software radios more personal. IEEE Wirel. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef] [Green Version]
- Geirhofer, S.; Sun, J.Z.; Tong, L.; Sadler, B.M. Cognitive frequency hopping based on interference prediction. Mob. Comput. Commun. Rev. 2009, 13, 49–61. [Google Scholar] [CrossRef]
- Han, G.; Xiao, L.; Poor, H.V. Two-dimensional anti-jamming communication based on deep reinforcement learning. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2017; pp. 2087–2091. [Google Scholar]
- Hasan, S.; Yu, D.Y. Algorithm and experimentation of frequency hopping, band hopping, and transmission band selection using a cognitive radio test bed. In Proceedings of the 2014 23rd Wireless and Optical Communication Conference (WOCC), Newark, NJ, USA, 9–10 May 2014; pp. 1–5. [Google Scholar]
- Fan, G.W.; Yu, B.G.; Chao, L.; Deng, Z. Design of interference recognition and classification filter of satellite navigation electromagnetic environment. Syst. Eng. Electron. 2014, 36, 234–238. [Google Scholar] [CrossRef]
- Yang, X.M.; Tao, R. Automatic Identification of Interferences in Direct Sequence Spread Spectrum Communication System. Acta Armamentarii 2008, 29, 1078–1082. [Google Scholar] [CrossRef]
- Zhou, Z.D.; Chen, Z.L.; Gao, X.J.; Yao, A. Automatic Recognition of Interference Type in UAV Data-link. Comput. Meas. Control 2015, 23, 3780–3782. [Google Scholar] [CrossRef]
- Meng, X.-Y.; Tao, R.; Jia, L.-N. An Intelligent Anti-jamming Frequency Hopping System. In Proceedings of the 2010 First International Conference on Pervasive Computing, Signal Processing and Applications, Harbin, China, 17–19 September 2010; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2010; pp. 1053–1056. [Google Scholar]
- Fang, F.; Li, Y.G.; Niu, Y.T.; Wang, Y.T. Interference signal recognition based on decision tree algorithm. Commun. Technol. 2019, 2617–2623. [Google Scholar] [CrossRef]
- Liang, J.D.; Cheng, Y.F.; Du, Y.; Wang, P. The Research of Interference Recognition Technology Based on the Joint Multi-dimensional Features. J. Signal Process. 2017, 33, 1609–1615. [Google Scholar] [CrossRef]
- Wang, G.S.; Ren, Q.H.; Jiang, Z.G.; Liu, Y.; Xu, B. Jamming classification and recognition in transform domain communication system based on signal feature space. Syst. Eng. Electron. 2017, 39, 1950–1958. [Google Scholar] [CrossRef]
- Wang, G.H.; Bai, J.; Zhang, X.Y.; Sun, D. Detection and classification algorithm of suppression interference based on characteristic differences of FRFT domain. J. Beijing Univ. Aeronaut. Astronaut. 2018, 44, 1124–1132. [Google Scholar] [CrossRef]
- Huang, H.; Wu, L.M.; Bao, L.L.; Liu, W. Jamming recognition scheme based on fractal box dimension and Wavelet packet energy. J. Air Force Early Warn. Acad. 2014, 28, 422–426. [Google Scholar] [CrossRef]
- Zhang, X.Z. An Interference Pattern Recognition Method Based on Complexity Measure. J. Heze Univ. 2013, 35, 30–36. [Google Scholar] [CrossRef]
- Niu, Y.; Cheng, Y.; Chen, J. Jamming pattern recognition based on complexity measure. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010; Volume 8, pp. 3596–3600. [Google Scholar] [CrossRef]
- Sevcik, C. On fractal dimension of waveforms. Chaossolitons Fractals 2006, 28, 579–580. [Google Scholar] [CrossRef]
- Tao, R.; Deng, B.; Zhang, W.-Q.; Wang, Y. Sampling and Sampling Rate Conversion of Band Limited Signals in the Fractional Fourier Transform Domain. IEEE Trans. Signal Process. 2007, 56, 158–171. [Google Scholar] [CrossRef]
- Chen, X.L.; Guan, J.; Liu, N.B.; He, Y. Adaptive filtering algorithm for LFM signal and performance analysis based on FRFT. Mod. Radar 2010, 32, 48–53. [Google Scholar] [CrossRef]
- Shen, P. Research on Interference Recognition Technology in Frequency Hopping Communication System; Xidian University: Xi’an, China, 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jamming Types | Jamming Parameters | |
|---|---|---|
| NNJ | Center frequency | 2.5 MHz |
| Bandwidth | 10% (FH bandwidth) | |
| BNJ | Bandwidth | 100% (FH bandwidth) |
| STJ | Jamming frequency | 5 MHz |
| MTJ | Jamming frequency | {3, 4, 5, 6, 7, 8, 9, 10} MHz |
| PJ | Duty cycle | 10% |
| LFM | Frequency sweep range | 2–8 MHz |
| Windows Version | System | ||
|---|---|---|---|
| Windows10 | Processor | Installed memory (RAM) | System type |
| Intel Core i5-1035G1 CPU | 16.0 (GB) | 64-bit operating system | |
| Algorithm | Feature Extraction Time |
|---|---|
| Proposed algorithm | 73.538922 s |
| Algorithm in [19] | 107.171106 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, R.; Liu, J.; Tang, H. Two-Dimensional Jamming Recognition Algorithm Based on the Sevcik Fractal Dimension and Energy Concentration Property for UAV Frequency Hopping Systems. Information 2020, 11, 520. https://0-doi-org.brum.beds.ac.uk/10.3390/info11110520
Xue R, Liu J, Tang H. Two-Dimensional Jamming Recognition Algorithm Based on the Sevcik Fractal Dimension and Energy Concentration Property for UAV Frequency Hopping Systems. Information. 2020; 11(11):520. https://0-doi-org.brum.beds.ac.uk/10.3390/info11110520
Chicago/Turabian StyleXue, Rui, Jing Liu, and Huaiyu Tang. 2020. "Two-Dimensional Jamming Recognition Algorithm Based on the Sevcik Fractal Dimension and Energy Concentration Property for UAV Frequency Hopping Systems" Information 11, no. 11: 520. https://0-doi-org.brum.beds.ac.uk/10.3390/info11110520