
Digital Twin of a Magnetic Medical Microrobot with Stochastic Model Predictive Controller Boosted by Machine Learning in Cyber-Physical Healthcare Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
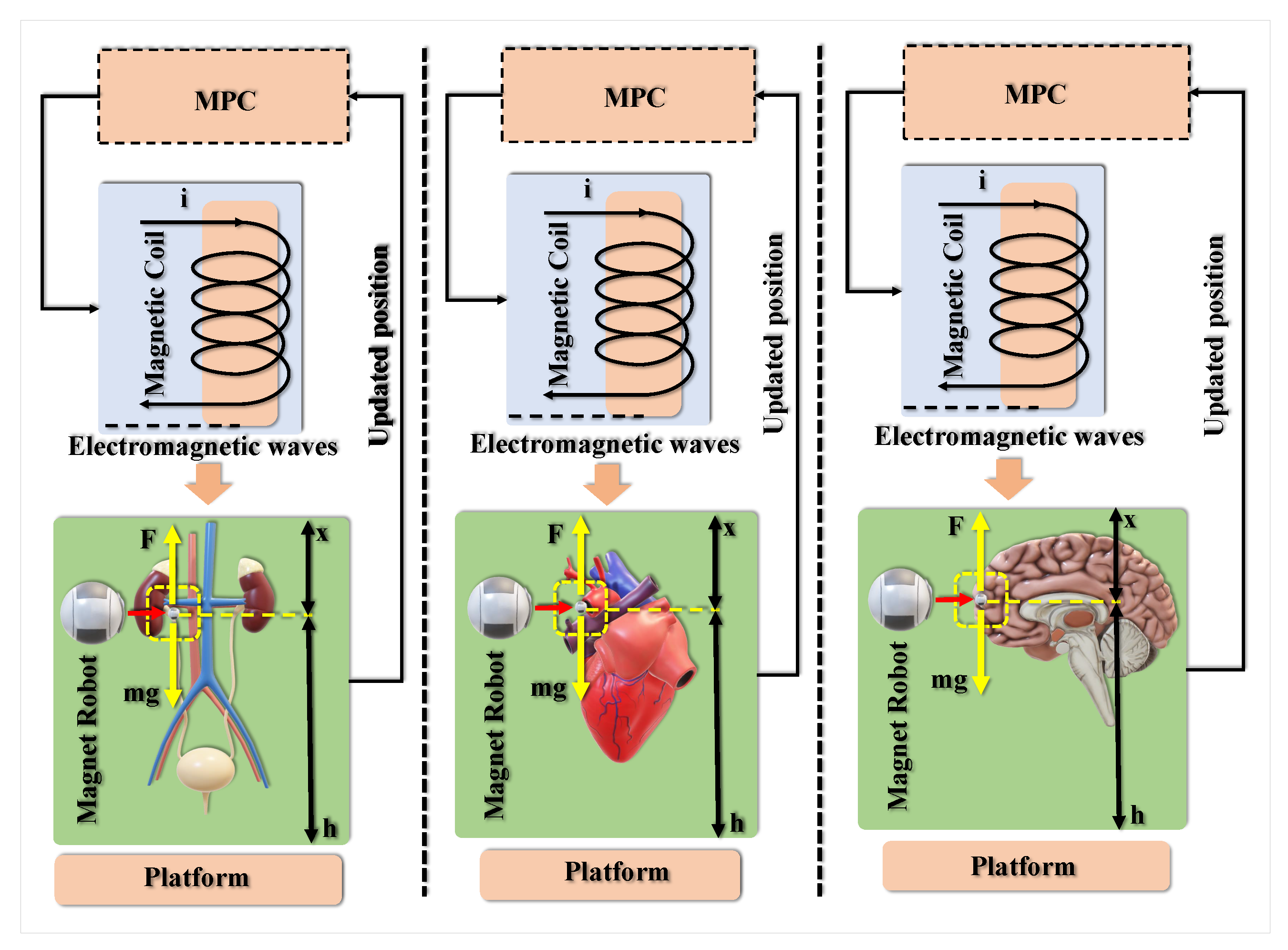
2. Cyber-Physical Healthcare Systems and Digital Twins
3. Problem Description
4. Methodology
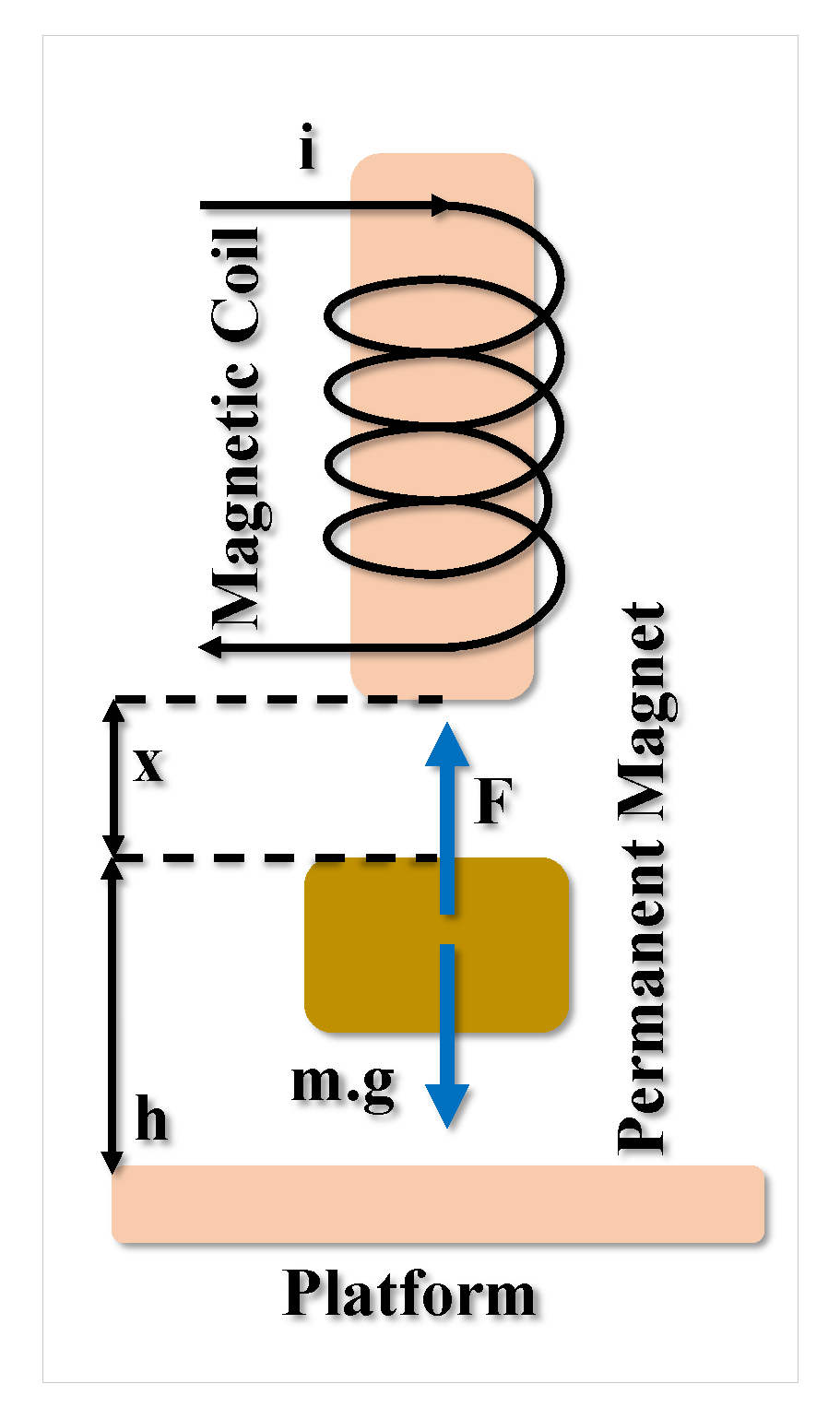
4.1. Permanent Magnet Movement
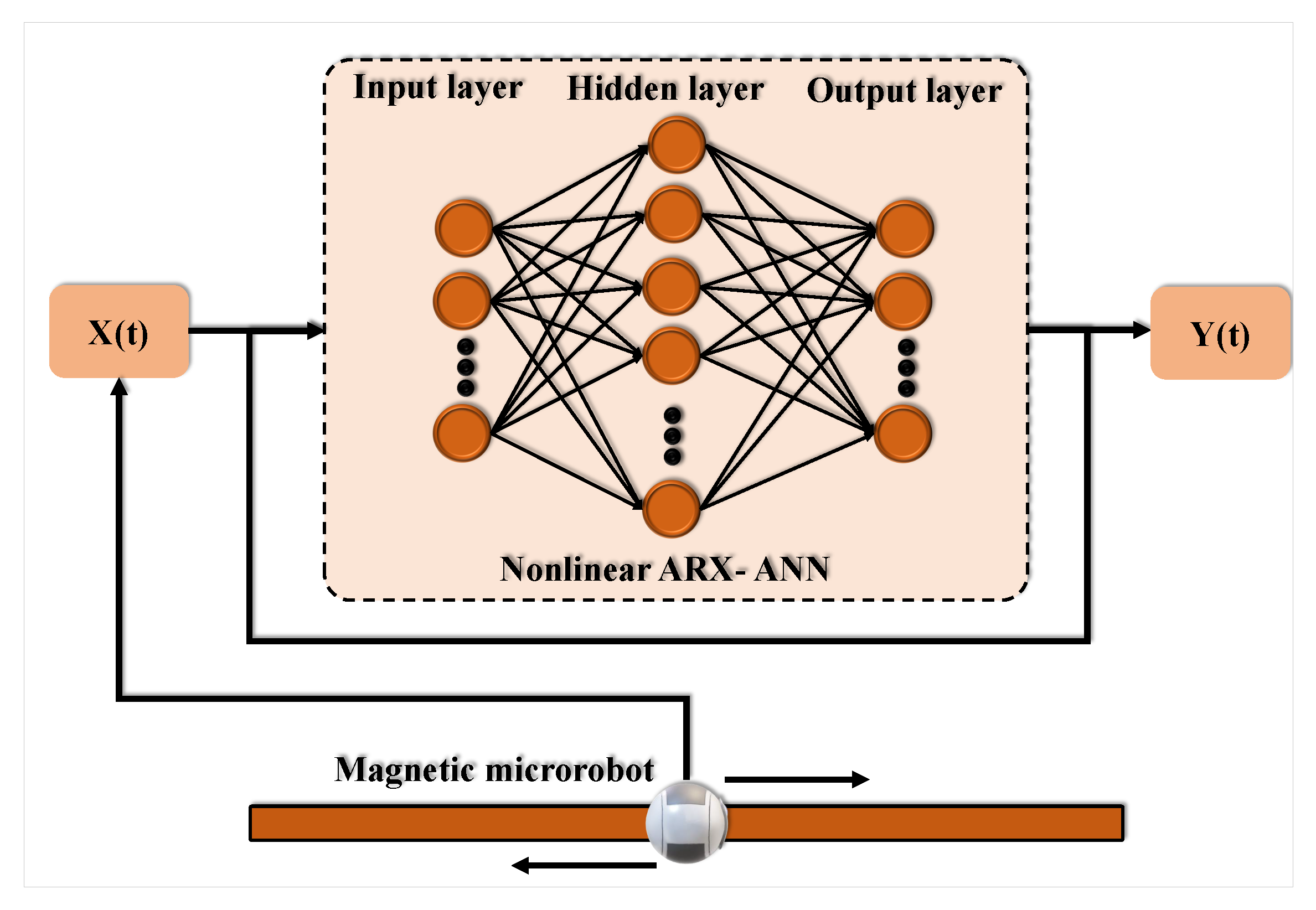
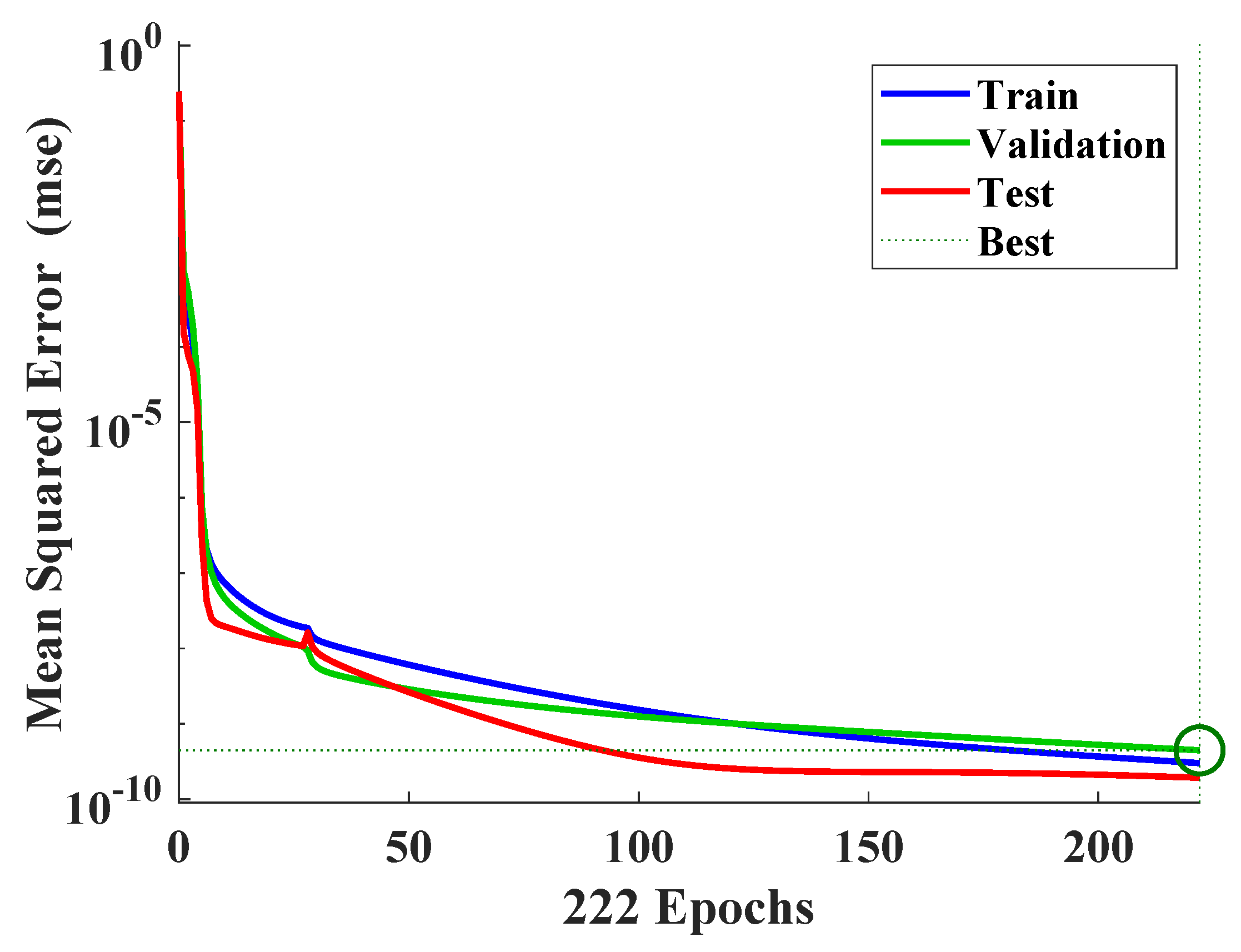
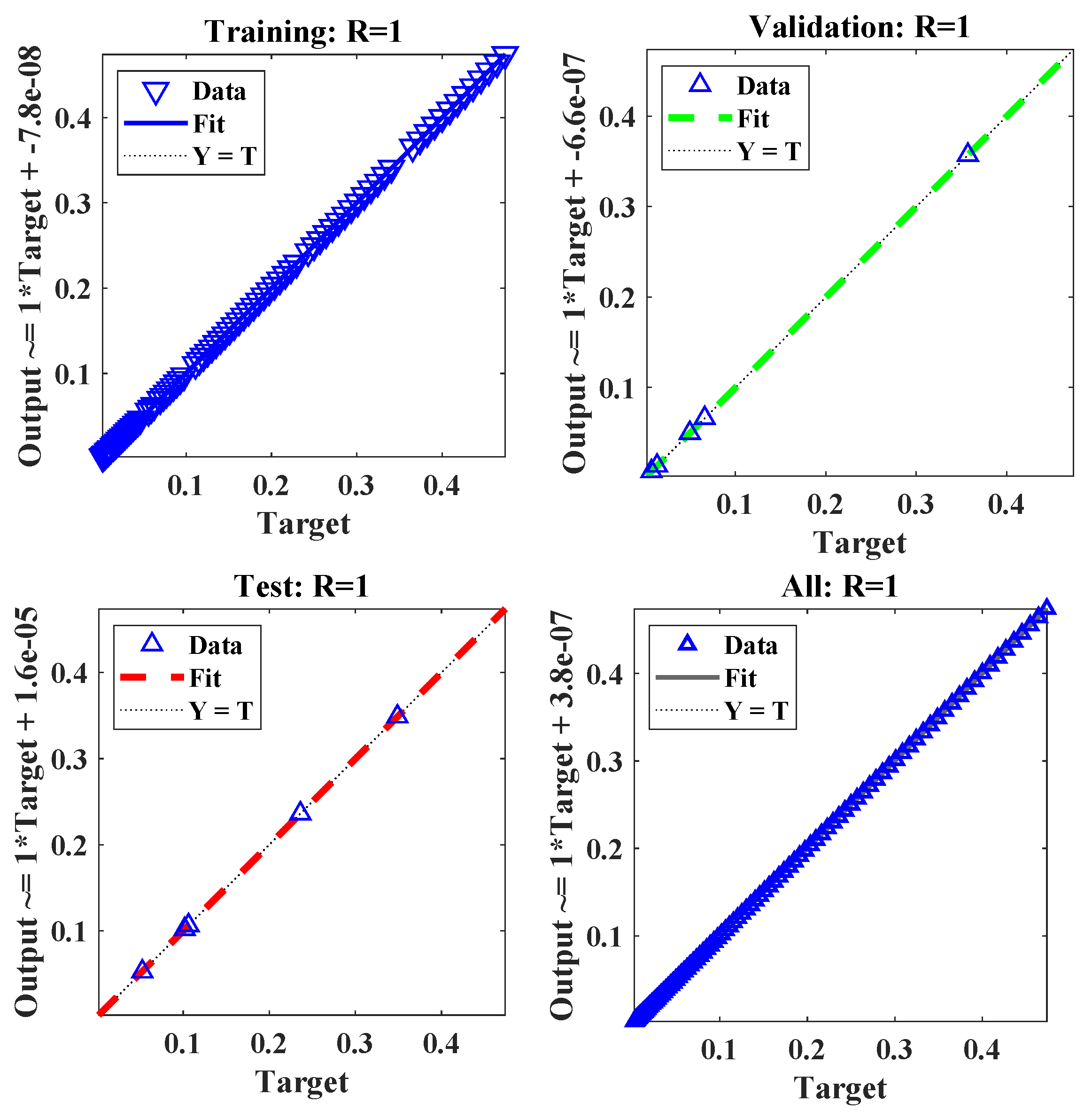
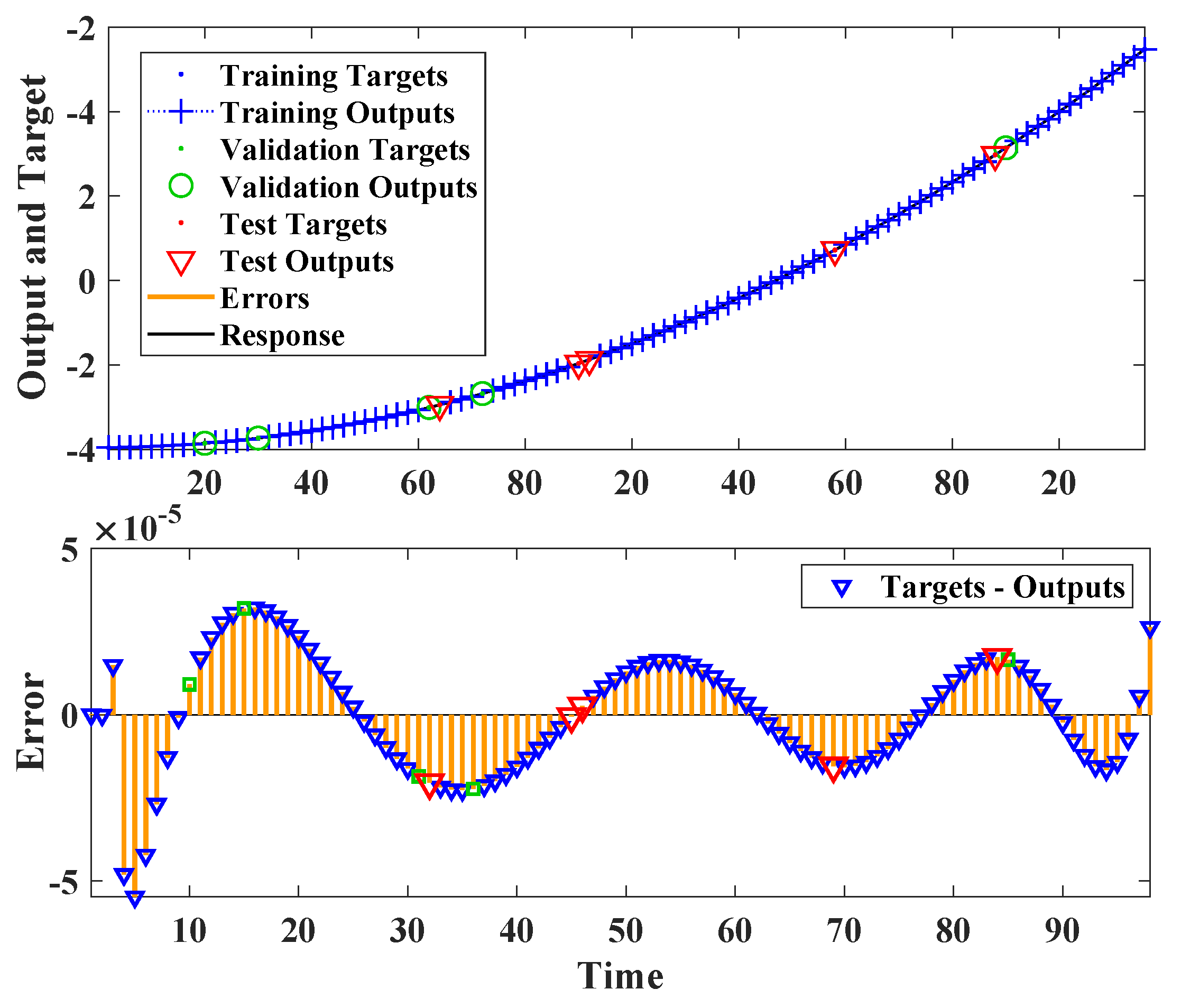
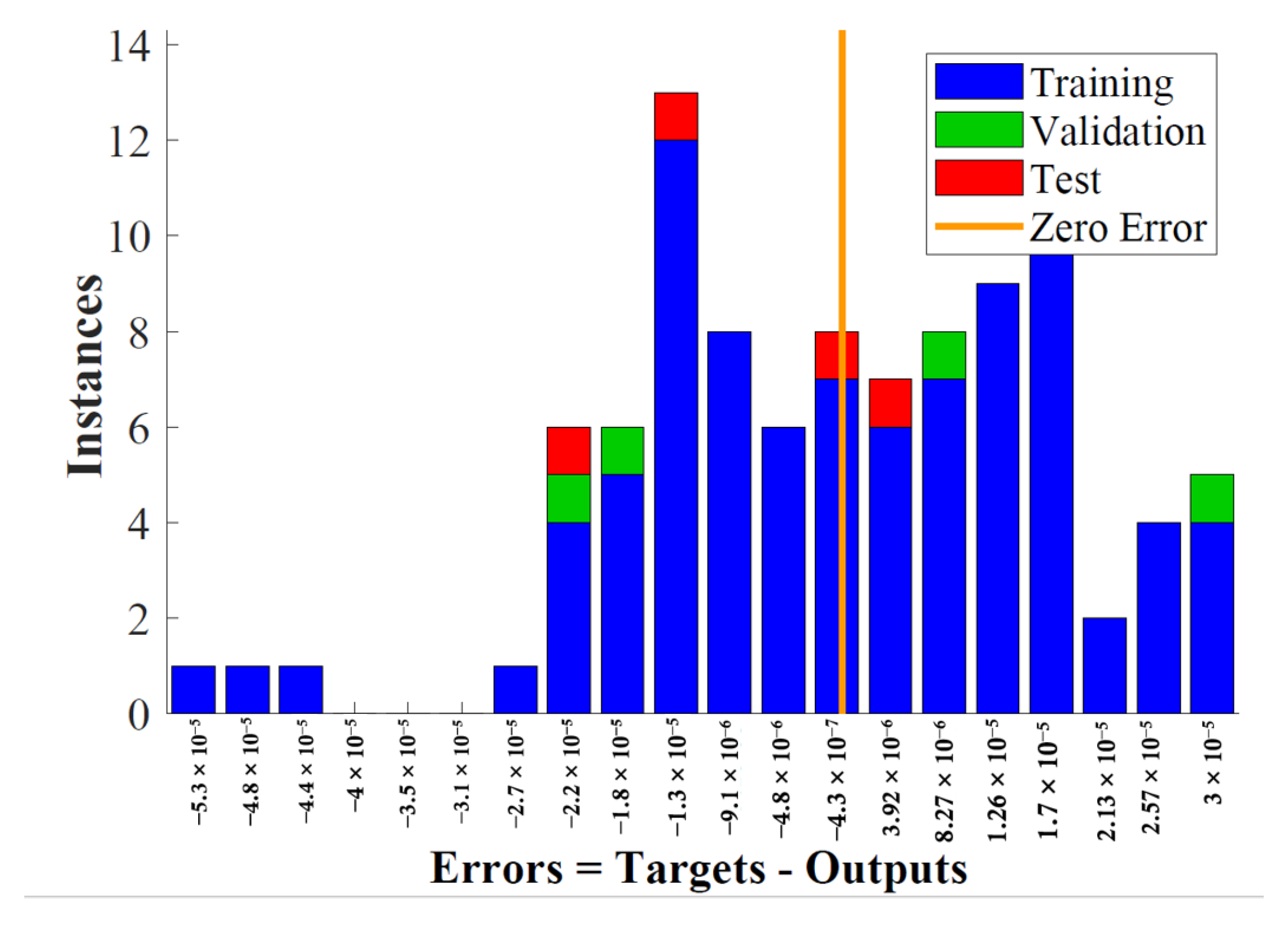
4.2. Machine Learning System Identification
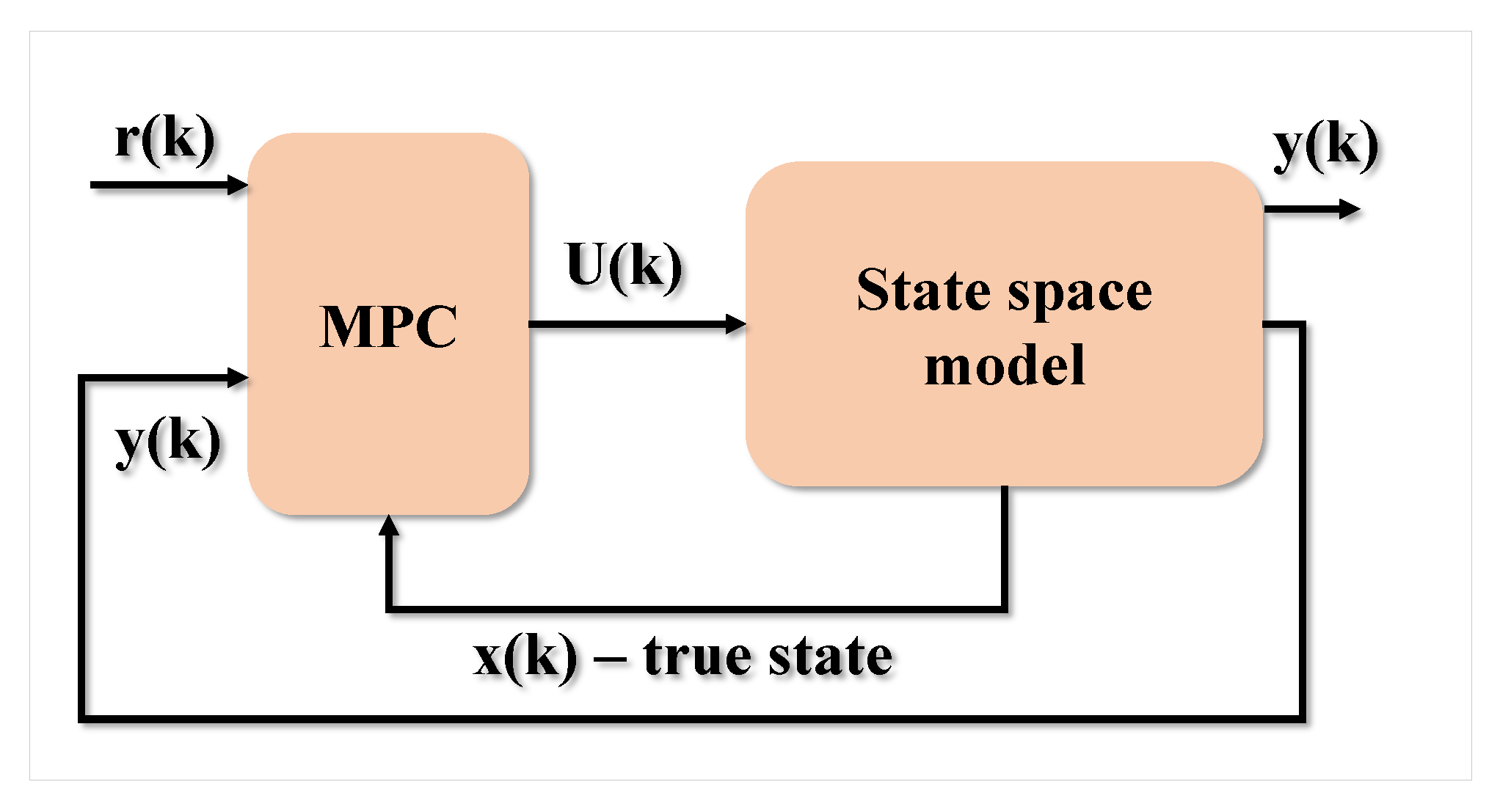
4.3. Model Predictive Controller
- The value of the controlled variable is forecasted across the prediction horizon at each sampling time. This forecast is based on the future values of the control variable throughout the course of a control horizon.
- A reference trajectory is defined as , where . Specifies the intended system trajectory across the forecast horizon.
- The future control vector is computed to minimize a cost function. The cost function is a function of the differences between the reference trajectory and the anticipated output of the model.
- When the cost function has been minimized, the first optimal control action is performed in the plant, followed by an analysis of the results. The plant states analysis will be utilized as the model’s initial state for the following iteration.
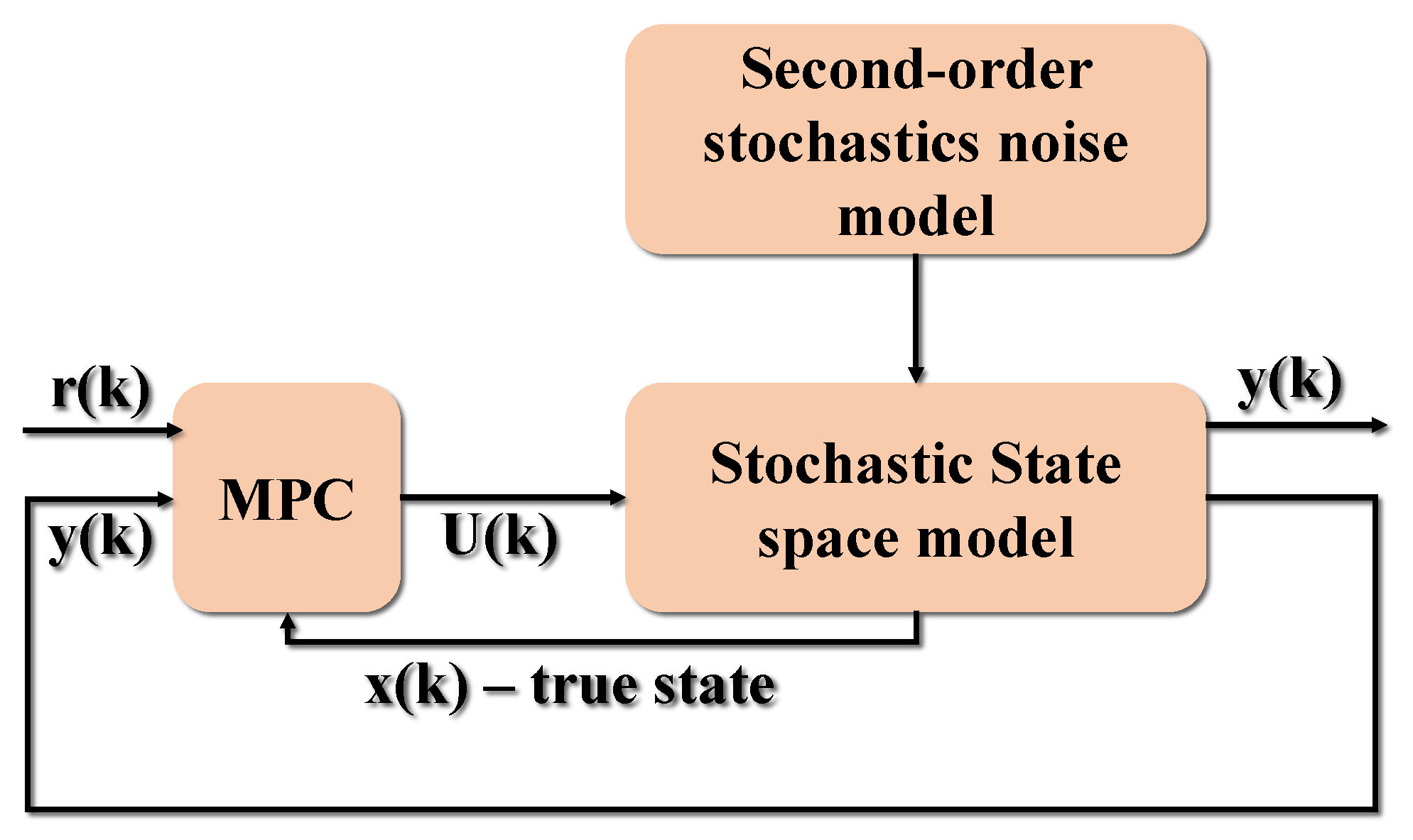
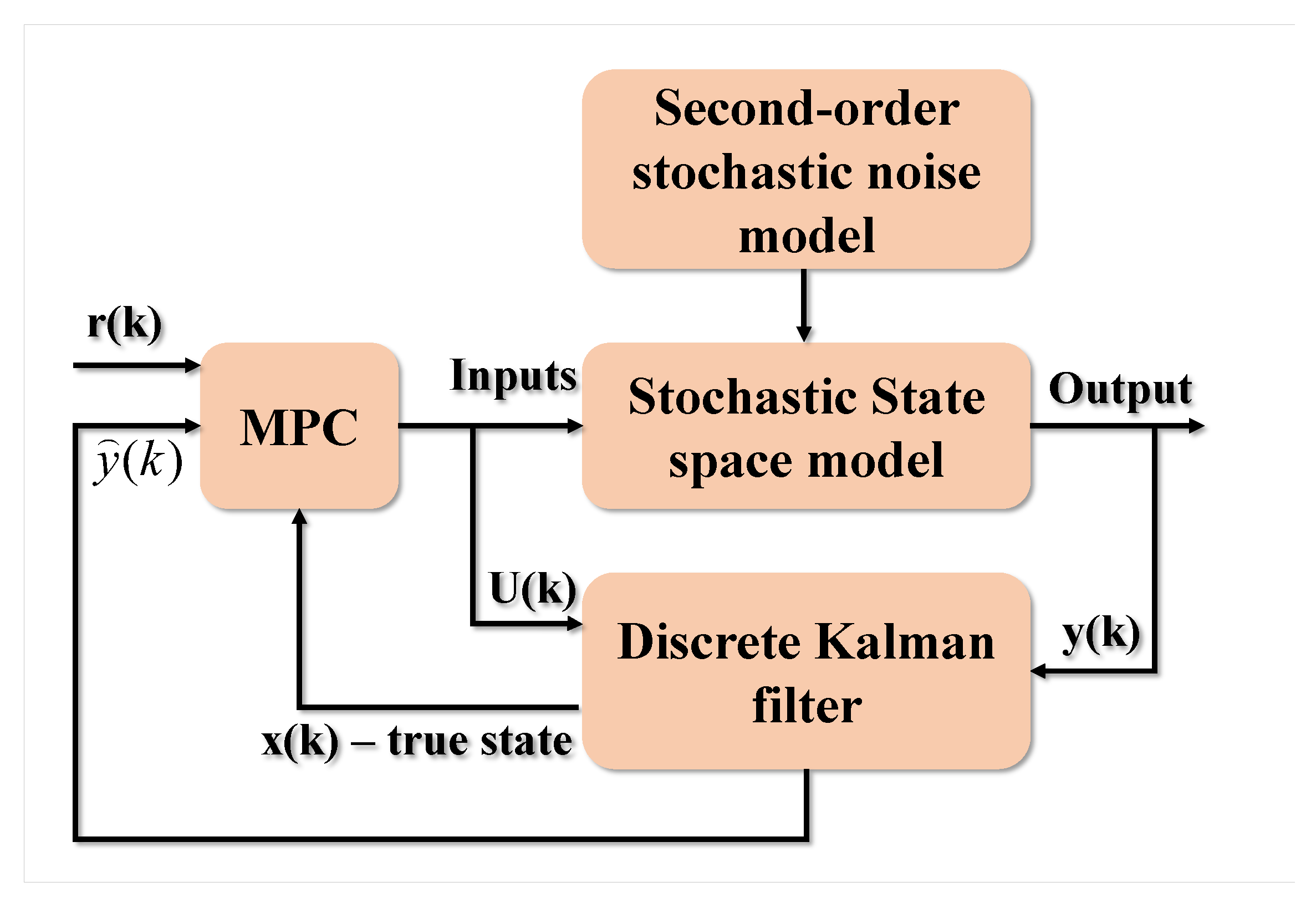
4.4. Stochastic Model Predictive Controller
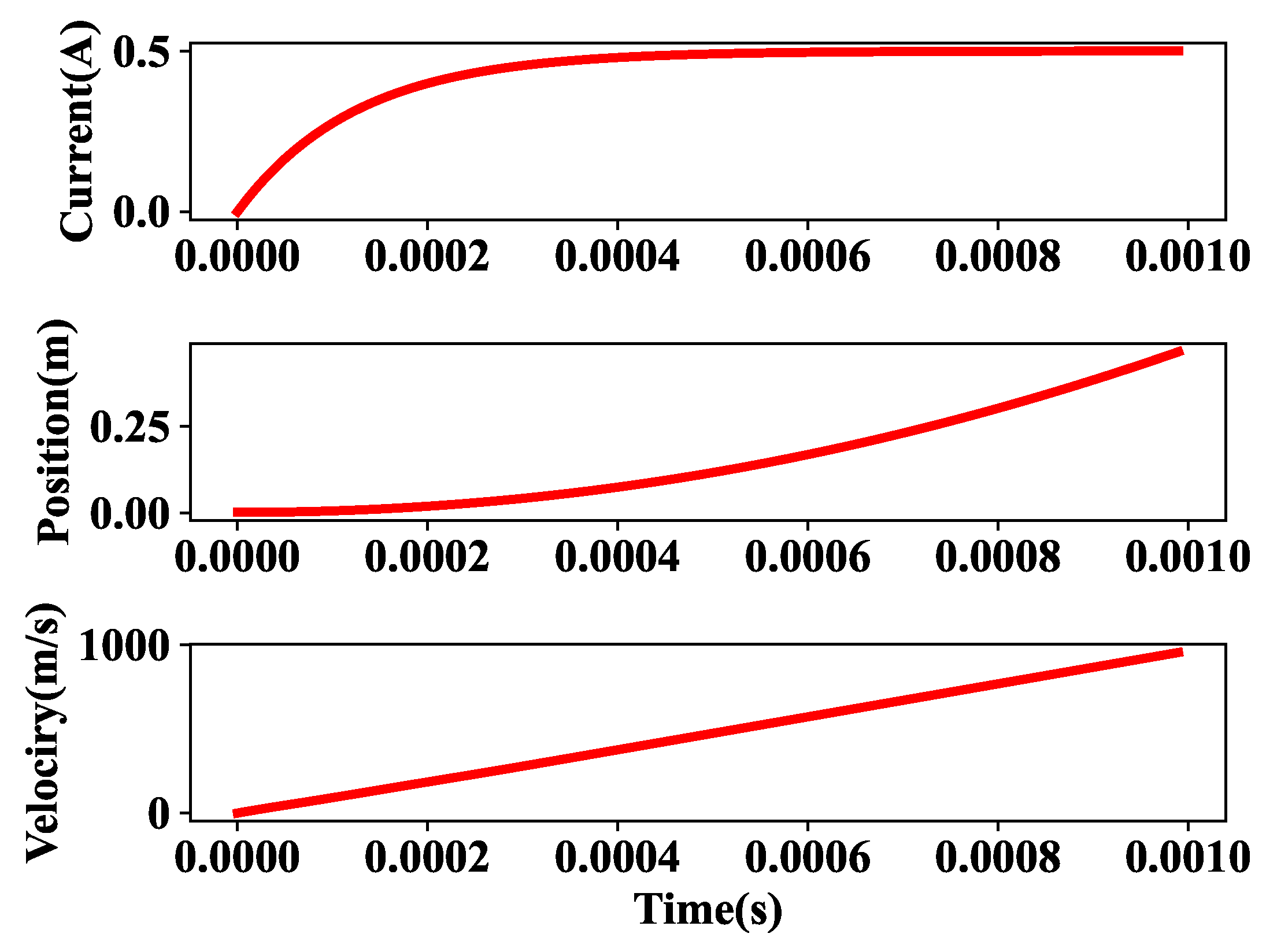
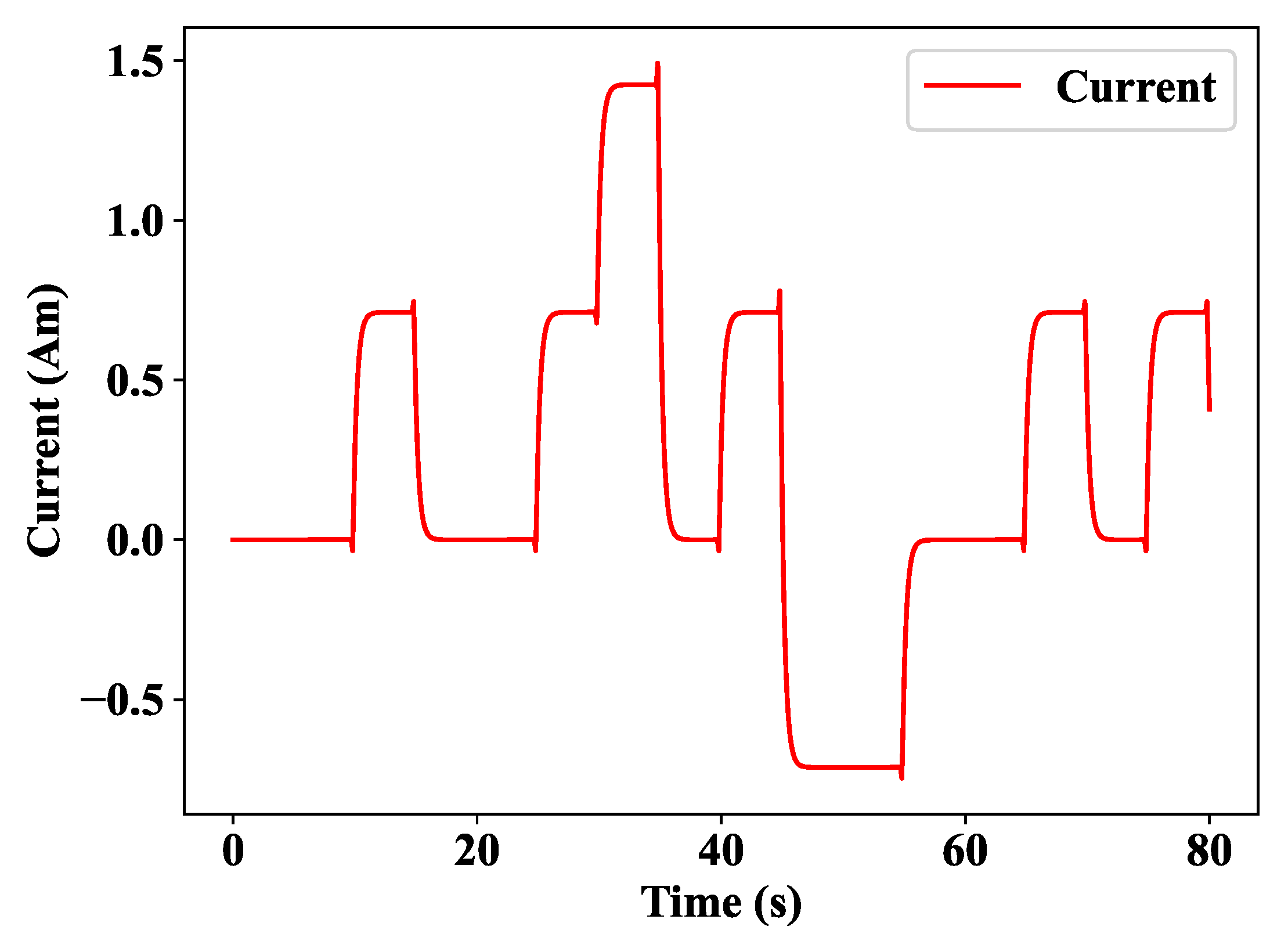
5. Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dey, N.; Ashour, A.S.; Shi, F.; Fong, S.J.; Tavares, J.M.R. Medical cyber-physical systems: A survey. J. Med. Syst. 2018, 42, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karkhanehchi, M.M.; Parandin, F.; Zahedi, A. Design of an all optical half-adder based on 2D photonic crystals. Photonic Netw. Commun. 2017, 33, 159–165. [Google Scholar] [CrossRef]
- Parandin, F.; Sheykhian, A. Design and simulation of a 2× 1 All-Optical multiplexer based on photonic crystals. Opt. Laser Technol. 2022, 151, 108021. [Google Scholar] [CrossRef]
- Belverdi, A.R.; Jamshidi, M.B.; Taherpour, A.A.; Jamshidi, M.; Rezaei, O. Novel donor-acceptor non-fullerene metal-organic solar cells: A first DFT and TD-DFT study. Phys. B Condens. Matter 2018, 542, 37–43. [Google Scholar] [CrossRef]
- Parandin, F.; Mahtabi, N. Design of an ultra-compact and high-contrast ratio all-optical NOR gate. Opt. Quantum Electron. 2021, 53, 1–9. [Google Scholar] [CrossRef]
- Jamshidi, M.; Farhadi, R.; Jamshidi, M.; Shamsi, Z.; Naseh, S. Using a soft computing method for impedance modelling of li-ion battery current. Int. J. Adv. Intell. Paradig. 2020, 16, 18–29. [Google Scholar] [CrossRef]
- Parandin, F.; Heidari, F.; Rahimi, Z.; Olyaee, S. Two-Dimensional photonic crystal Biosensors: A review. Opt. Laser Technol. 2021, 144, 107397. [Google Scholar] [CrossRef]
- Khalaj, O.; Jamshidi, M.B.; Saebnoori, E.; Mašek, B.; Štadler, C.; Svoboda, J. Hybrid Machine Learning Techniques and Computational Mechanics: Estimating the Dynamic Behavior of Oxide Precipitation Hardened Steel. IEEE Access 2021, 9, 156930–156946. [Google Scholar] [CrossRef]
- Parandin, F.; Moayed, M. Designing and simulation of 3-input majority gate based on two-dimensional photonic crystals. Optik 2020, 216, 164930. [Google Scholar] [CrossRef]
- Jamshidi, M.B.; Gorjiankhanzad, M.; Lalbakhsh, A.; Roshani, S. A novel multiobjective approach for detecting money laundering with a neuro-fuzzy technique. In Proceedings of the 2019 IEEE 16th International Conference on Networking, Sensing and Control (ICNSC), Banff, AB, Canada, 9–11 May 2019; pp. 454–458. [Google Scholar]
- Jamshidi, M.B.; Roshani, S.; Talla, J.; Sharifi-Atashgah, M.S.; Roshani, S.; Peroutka, Z. Cloud-based Machine Learning Techniques Implemented by Microsoft Azure for Designing Power Amplifiers. In Proceedings of the 2021 IEEE 12th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 1–4 December 2021; pp. 41–44. [Google Scholar]
- Parandin, F.; Malmir, M.R.; Naseri, M.; Zahedi, A. Reconfigurable all-optical NOT, XOR, and NOR logic gates based on two dimensional photonic crystals. Superlattices Microstruct. 2018, 113, 737–744. [Google Scholar] [CrossRef]
- Jamshidi, M.; Lalbakhsh, A.; Talla, J.; Peroutka, Z.; Hadjilooei, F.; Lalbakhsh, P.; Jamshidi, M.; La Spada, L.; Mirmozafari, M.; Dehgani, M.; et al. Artificial intelligence and COVID-19: Deep learning approaches for diagnosis and treatment. IEEE Access 2020, 8, 109581–109595. [Google Scholar] [CrossRef]
- Jamshidi, M.; Lalbakhsh, A.; Talla, J.; Peroutka, Z.; Roshani, S.; Matousek, V.; Roshani, S.; Mirmozafari, M.; Malek, Z.; La Spada, L.; et al. Deep learning techniques and covid-19 drug discovery: Fundamentals, state-of-the-art and future directions. In Emerging Technologies During the Era of COVID-19 Pandemic; Springer: Berlin/Heidelberg, Germany, 2021; pp. 9–31. [Google Scholar]
- Shafiei, A.; Jamshidi, M.B.; Khani, F.; Talla, J.; Peroutka, Z.; Gantassi, R.; Baz, M.; Cheikhrouhou, O.; Hamam, H. A Hybrid Technique Based on a Genetic Algorithm for Fuzzy Multiobjective Problems in 5G, Internet of Things, and Mobile Edge Computing. Math. Probl. Eng. 2021, 2021, 9194578. [Google Scholar] [CrossRef]
- Roshani, S.; Koziel, S.; Roshani, S.; Jamshidi, M.B.; Parandin, F.; Szczepanski, S. Design of a Patch Power Divider With Simple Structure and Ultra-Broadband Harmonics Suppression. IEEE Access 2021, 9, 165734–165744. [Google Scholar] [CrossRef]
- Mohebi, Z.; Parandin, F.; Shama, F.; Hazeri, A. Highly linear wide band low noise amplifiers: A literature review (2010–2018). Microelectron. J. 2020, 95, 104673. [Google Scholar] [CrossRef]
- Jamshidi, M.B.; Roshani, S.; Talla, J.; Peroutka, Z.; Roshani, S. A novel filter-based power divider for wireless communication in intelligent transportation systems. In Proceedings of the 2020 19th International Conference on Mechatronics-Mechatronika (ME), Prague, Czech Republic, 2–4 December 2020; pp. 1–5. [Google Scholar]
- Desaraju, V.R.; Spitzer, A.E.; O’Meadhra, C.; Lieu, L.; Michael, N. Leveraging experience for robust, adaptive nonlinear MPC on computationally constrained systems with time-varying state uncertainty. Int. J. Robot. Res. 2018, 37, 1690–1712. [Google Scholar] [CrossRef]
- Rawlings, J.B.; Mayne, D.Q.; Diehl, M. Model Predictive Control: Theory, Computation, and Design; Nob Hill Publishing: Madison, WI, USA, 2017; Volume 2. [Google Scholar]
- Raković, S.V.; Levine, W.S. Handbook of Model Predictive Control; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Di Ruscio, D.L. Model Predictive Control with Integral Action: A Simple MPC Algorithm. 2013. Available online: https://openarchive.usn.no/usn-xmlui/handle/11250/2438440 (accessed on 5 April 2022).
- Aly, M.; Ahmed, E.M.; Shoyama, M. An improved model predictive controller for highly reliable grid connected photovoltaic multilevel inverters. In Proceedings of the 2017 IEEE International Telecommunications Energy Conference (INTELEC), Broadbeach, QLD, Australia, 22–26 October 2017; pp. 450–455. [Google Scholar]
- Arezzo, A.; Menciassi, A.; Valdastri, P.; Ciuti, G.; Lucarini, G.; Salerno, M.; Di Natali, C.; Verra, M.; Dario, P.; Morino, M. Experimental assessment of a novel robotically-driven endoscopic capsule compared to traditional colonoscopy. Dig. Liver Dis. 2013, 45, 657–662. [Google Scholar] [CrossRef]
- Valdastri, P.; Ciuti, G.; Verbeni, A.; Menciassi, A.; Dario, P.; Arezzo, A.; Morino, M. Magnetic air capsule robotic system: Proof of concept of a novel approach for painless colonoscopy. Surg. Endosc. 2012, 26, 1238–1246. [Google Scholar] [CrossRef]
- Sikorski, J.; Dawson, I.; Denasi, A.; Hekman, E.E.; Misra, S. Introducing BigMag—A novel system for 3D magnetic actuation of flexible surgical manipulators. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3594–3599. [Google Scholar]
- Chautems, C.; Nelson, B.J. The tethered magnet: Force and 5-DOF pose control for cardiac ablation. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4837–4842. [Google Scholar]
- Helwa, M.K.; Esser, A.; Schoellig, A.P. Estimation-based model predictive control for automatic crosswind stabilization of hybrid aerial vehicles. arXiv 2018, arXiv:1810.00046. [Google Scholar]
- Santander, O.; Elkamel, A.; Budman, H. Robust economic model predictive control: Disturbance rejection, robustness and periodic operation in chemical reactors. Eng. Optim. 2019, 51, 896–914. [Google Scholar] [CrossRef]
- Keshmiri Neghab, H.; Pariz, N. Designing a Fuzzy Logic Controller for Automated Backward Parking Car. In Proceedings of the 2019 IEEE 4th Conference on Technology In Electrical and Computer Engineering (ETECH 2019) Information and Communication Technology, Tehran, Iran, 29 May 2019. [Google Scholar]
- Neghab, H.K.; Neghab, H.K. Calibration of a Nonlinear DC Motor under Uncertainty Using Nonlinear Optimization Techniques. Period. Polytech. Electr. Eng. Comput. Sci. 2021, 65, 42–52. [Google Scholar] [CrossRef]
- Alrifaee, B.; Abel, D.; Ament, C. Networked Model Predictive Control for Vehicle Collision Avoidance. Technical Report, Lehrstuhl und Institut für Regelungstechnik. 2017. Available online: https://d-nb.info/1158599595/34 (accessed on 5 April 2022).
- Alexis, K.; Papachristos, C.; Siegwart, R.; Tzes, A. Robust model predictive flight control of unmanned rotorcrafts. J. Intell. Robot. Syst. 2016, 81, 443–469. [Google Scholar] [CrossRef]
- Brockers, R.; Hummenberger, M.; Weiss, S.; Matthies, L. Towards autonomous navigation of miniature UAV. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Columbus, OH, USA, 23–28 June 2014; pp. 631–637. [Google Scholar]
- Sharifi, A.; Nobahari, H. Multiple model filters applied to wind model estimation for a fixed wing UAV. In Proceedings of the 2016 7th International Conference on Mechanical and Aerospace Engineering (ICMAE), London, UK, 18–20 July 2016; pp. 109–115. [Google Scholar]
- Desaraju, V.R. Safe, Efficient, and Robust Predictive Control of Constrained Nonlinear Systems. 2017. Available online: https://www.ri.cmu.edu/publications/safe-efficient-robust-predictive-control-constrained-nonlinear-systems/ (accessed on 5 April 2022).
- Desaraju, V.R.; Michael, N. Leveraging experience for computationally efficient adaptive nonlinear model predictive control. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5314–5320. [Google Scholar]
- Desaraju, V.R.; Michael, N. Fast nonlinear model predictive control via partial enumeration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1243–1248. [Google Scholar]
- Desaraju, V.R.; Spitzer, A.; Michael, N. Experience-driven Predictive Control with Robust Constraint Satisfaction under Time-Varying State Uncertainty. In Robotics: Science and Systems; CS.cmu.edu: New York, NY, USA, 2017. [Google Scholar]
- Verma, R. Smart City Healthcare Cyber Physical System: Characteristics, Technologies and Challenges. Wirel. Pers. Commun. 2022, 122, 1413–1433. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, G.N.; Le Viet, N.H.; Elhoseny, M.; Shankar, K.; Gupta, B.; Abd El-Latif, A.A. Secure blockchain enabled Cyber–physical systems in healthcare using deep belief network with ResNet model. J. Parallel Distrib. Comput. 2021, 153, 150–160. [Google Scholar] [CrossRef]
- Jamshidi, M.B.; Rostami, S. A dynamic artificial neural network approach to estimate thermal behaviors of li-ion batteries. In Proceedings of the 2017 IEEE 2nd International Conference on Automatic Control and Intelligent Systems (I2CACIS), Kota Kinabalu, Malaysia, 21 October 2017; pp. 116–121. [Google Scholar]
- Jamshidi, M.; Lalbakhsh, A.; Lotfi, S.; Siahkamari, H.; Mohamadzade, B.; Jalilian, J. A neuro-based approach to designing a Wilkinson power divider. Int. J. Microw. Comput.-Aided Eng. 2020, 30, e22091. [Google Scholar] [CrossRef]
- Jamshidi, M.B.; Lalbakhsh, A.; Mohamadzade, B.; Siahkamari, H.; Mousavi, S.M.H. A novel neural-based approach for design of microstrip filters. AEU-Int. J. Electron. Commun. 2019, 110, 152847. [Google Scholar] [CrossRef]
- Jamshidi, M.B.; Jamshidi, M.; Rostami, S. An intelligent approach for nonlinear system identification of a li-ion battery. In Proceedings of the 2017 IEEE 2nd International Conference on Automatic Control and Intelligent Systems (I2CACIS), Kota Kinabalu, Malaysia, 21 October 2017; pp. 98–103. [Google Scholar]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keshmiri Neghab, H.; Jamshidi, M.; Keshmiri Neghab, H. Digital Twin of a Magnetic Medical Microrobot with Stochastic Model Predictive Controller Boosted by Machine Learning in Cyber-Physical Healthcare Systems. Information 2022, 13, 321. https://0-doi-org.brum.beds.ac.uk/10.3390/info13070321
Keshmiri Neghab H, Jamshidi M, Keshmiri Neghab H. Digital Twin of a Magnetic Medical Microrobot with Stochastic Model Predictive Controller Boosted by Machine Learning in Cyber-Physical Healthcare Systems. Information. 2022; 13(7):321. https://0-doi-org.brum.beds.ac.uk/10.3390/info13070321
Chicago/Turabian StyleKeshmiri Neghab, Hamid, Mohammad (Behdad) Jamshidi, and Hamed Keshmiri Neghab. 2022. "Digital Twin of a Magnetic Medical Microrobot with Stochastic Model Predictive Controller Boosted by Machine Learning in Cyber-Physical Healthcare Systems" Information 13, no. 7: 321. https://0-doi-org.brum.beds.ac.uk/10.3390/info13070321