
Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review

1
Computer Engineering Department, Science and Research Branch, Islamic Azad University, Tehran 1477893855, Iran
2
Future Technology Research Center, National Yunlin University of Science and Technology, 123 University Road, Section 3, Douliou, Yunlin 64002, Taiwan
*
Author to whom correspondence should be addressed.
Information 2023, 14(10), 555; https://0-doi-org.brum.beds.ac.uk/10.3390/info14100555
Submission received: 29 August 2023
/
Revised: 3 October 2023
/
Accepted: 5 October 2023
/
Published: 11 October 2023
(This article belongs to the Special Issue Automotive System Security: Recent Advances and Challenges)
Abstract
:Autonomous vehicles (AVs) have emerged as a promising technology for enhancing road safety and mobility. However, designing AVs involves various critical aspects, such as software and system requirements, that must be carefully addressed. This paper investigates safety-aware approaches for AVs, focusing on the software and system requirements aspect. It reviews the existing methods based on software and system design and analyzes them according to their algorithms, parameters, evaluation criteria, and challenges. This paper also examines the state-of-the-art artificial intelligence-based techniques for AVs, as AI has been a crucial element in advancing this technology. This paper reveals that 63% of the reviewed studies use various AI methods, with deep learning being the most prevalent (34%). The article also identifies the current gaps and future directions for AV safety research. This paper can be a valuable reference for researchers and practitioners on AV safety.
1. Introduction
Numerous research and industrial initiatives have been undertaken to enhance vehicle safety, prevent accidents, and predict road and vehicle mishap outcomes. Among the strategies, using autonomous vehicles stands out for its potential to preempt human errors and respond promptly to accidents in real time. The concept of autonomous vehicles has evolved. Initial endeavors focused on constructing systems using preprocessed data. However, recent years have witnessed the emergence of approaches and solutions that leverage data sensors to collect real-time information from the surroundings. These systems anticipate events, predict accidents, and gauge environmental conditions, thus enabling automated decision-making across various levels of autonomous driving.
The adoption of autonomous driving entails a meticulous consideration of diverse design facets. In contrast to conventional vehicles, self-driving vehicles demand the integration of system and software methodologies in addition to mechanical design considerations. Within the corpus of literature and research in this domain, a significant emphasis has been placed on the software dimension of vehicle design in order to enhance road safety. Safety management in vehicles ensures the safety of vehicles and their users by applying various methods, standards, and technologies. Safety management in vehicles can involve different aspects. Innovative solutions have been proposed for the software architecture of systems capable of facilitating safety in autonomous vehicles and the broader road environment. The paramount objective of this article is to categorize the methodologies that have been proffered within this domain. By scrutinizing the challenges, dimensions of implementation and simulation, evaluation techniques, and pivotal parameters, this study seeks to illuminate pathways for enhancing the design of system and software components. As outlined in the study by [1], the operational framework for autonomous vehicles operating in dynamic and unpredictable traffic scenarios necessitates a meticulous orchestration of data gathering and processing through a series of software-driven layers. This process encompasses three overarching strata, namely: data collection and processing via sensors, the perception stage, entailing the recognition and interpretation of prevailing environmental circumstances, and the execution of control planning. Remarkably, these three fundamental strata can be perceived as distinct software layers that are unique to autonomous vehicles, a facet notably absent within the realm of conventional vehicles. This intricate sequence of operations [2] is visually elucidated in Figure 1, where discrete steps are systematically depicted.
The software architecture for autonomous vehicles encompasses a multifaceted consideration of diverse elements. Sensors’ functionality is pivotal in ensuring the integrity of acquired data, given the spectrum of environmental, technological, and climatic variations across different contexts. Anticipating the requisites and devising preemptive solutions are integral to upholding vehicular safety. These integrated systems hold paramount significance in augmenting overall road safety. With the proliferation of self-driving vehicles, their dependency on human drivers and their subjective choices diminishes, thereby mitigating their susceptibility to human errors.
Within the domain of autonomous vehicle systems, diverse safety paradigms are implemented and are characterizable into distinct categories. The first category pertains to the granular tier of nodes, tools, and components within the system. Solutions here are independent of communication and leverage intricate datasets. The second category delves into security considerations at the system and communication levels. It meticulously scrutinizes critical factors and formulates remedies within network and system intricacies, underpinned by extant road safety data.
In tandem, the safety spectrum is inextricably interwoven with other, non-functional prerequisites, chief among them being security. In instances of system breaches or tampering with data gleaned from vehicles, there exists the potential for erroneous safety alerts to be propagated at an elevated level, potentially culminating in accidents. Furthermore, node or communication-level failures can precipitate system malfunctions, culminating in faulty decision-making processes. Researchers have directed their studies toward addressing the intricacies of autonomous vehicle safety. However, these efforts have yet to cover the manifold issues at hand comprehensively. Instead, each study has focused on specific facets of safety requisites. For instance, Rajabli et al. in [3] delved into the characteristics and factors that influence the safety assessment of autonomous automobiles. They established standards and certifications, highlighting ongoing concerns and pinpointing potential safety breaches.
Nonetheless, comparative analysis has yet to be undertaken regarding the evaluation criteria and the environmental variables impacting safety. Another paper, denoted as [4], delved into the ecological prerequisites. The framework of their methods revolves around the network and system communication linking vehicles and pedestrians. Regrettably, this study overlooks the vehicles’ inherent constraints and trials, such as the resource and energy limitations at the node level. Moreover, the holistic architectural structure of the vehicle needs to be more adequately examined.
In the forthcoming sections of this paper, our focus shifts to documents that encapsulate facets of safety within a broader context, enshrined within the realm of related works. The primary contributions of our research are outlined as follows:
- Delivering a concise tutorial on autonomous vehicle architectures, design methodologies, safety requisites, and standards insights.
- Formulating a component-centric perspective for architectural paradigms in autonomous vehicles.
- Analyzing pivotal perspectives within safety approaches of autonomous vehicles, underpinned by a software-centric standpoint.
- Categorizing tools, assessment methodologies, and criteria within prevailing software and system design approaches.
- Furnishing an all-encompassing survey detailing pragmatic techniques, persisting challenges, and emerging issues about safety in autonomous vehicles, as per the lens of software considerations.
This paper is structured as follows: Section 2 provides an overview of related work concerning safety issues. In Section 3, we outline the research methodology employed in this study. Section 4 delves into the realms of safety and autonomous vehicle concepts. The exploration of safety management techniques and the analysis of the obtained results are encapsulated in Section 5. Furthermore, Section 6 meticulously elucidates the classification of evaluation methods and measurements, encompassing open issues and challenges. Section 7 draws this discourse to a close by presenting our concluding remarks.
2. Related Work
This section aims to comprehensively review recent survey papers that delve into the requirements and functionalities necessary to design autonomous vehicle systems. These surveys will be examined to identify both their strengths and weaknesses.
Autonomous vehicles present various challenges, one of which involves predicting the behavior and performance of each component within their environment. An integral aspect of this challenge is pedestrians, whose behavior is dynamic and influenced by various environmental factors. Rasouli et al. [5] identified many factors impacting pedestrian behavior. The study encompassed communication with other components, interaction with drivers, environmental constraints, and external factors like weather and road conditions. While this study addressed a significant difficulty, it remains confined to a specific category and requires expansion to encompass the entirety of autonomous vehicle dynamics.
Another noteworthy challenge concerning autonomous vehicles is motion management, explored in [6] through deep reinforcement learning. This exploration encompassed a comprehensive study of all aspects of driving and its diverse levels. The methods are systematically categorized and analyzed, offering in-depth insights into vehicle models, modeling tools, and various procedures across different phases. Despite its contributions, this study’s exclusive focus on deep reinforcement learning narrows its scope for broader comparisons and assessments. Due to the different levels of automation that are expanding in self-driving cars, various sensors are used for different stages of data collection. Rosique et al. [2] worked on sensor behaviors and structures in the perception phase. The view of this article is based on the technologies, tools, and simulators related to sensors, and less attention has been paid to other aspects, including algorithms, other quality parameters, and how to design environments and systems.
Numerous publications approach the difficulties posed by autonomous vehicles from different angles, exploring diverse answers and algorithms. In one instance, Ma et al. [7] delved into the integrating of artificial intelligence in the development of autonomous vehicles. This investigation entailed a thorough exploration of artificial intelligence’s challenges and prerequisites. Various artificial intelligence-based methodologies were examined in communication and network environments and subsequently classified based on their alignment with autonomous vehicle requirements and simulation techniques. However, the study in question needs to address the challenges that may still need to be solved by these solutions within the system.
Similarly, it does not delve into the intricacies of implementation complexities that might arise due to the unique characteristics of autonomous vehicles. When addressing transparency and accountability in the context of self-driving vehicles, a pivotal study by Omeiza et al. [8] delved into the standards and protocols governing the management of systemic and environmental requirements. The research encompassed a comprehensive analysis of diverse stakeholders and their corresponding requisites. Challenges and issues entrenched within the design of the vehicle system were meticulously extracted and methodically categorized. While the safety concerns were addressed at the system level, the solutions implemented were not subject to an exhaustive and comprehensive review.
After the preliminary stages of autonomous vehicle development, rigorous testing is paramount. This testing regimen mitigates potential mishaps and minimizes the inherent risks of AI-driven decision-making. Kaur et al. [9] thoroughly examined testing tools, techniques, and an array of simulators. Initially, an intricate analysis of the myriad requirements and components relevant to self-driving automobiles was conducted. The subsequent evaluation focused on the simulation tools derived from these requirements, elucidating their merits and demerits. Nevertheless, critical variables influencing implementation, such as assessment parameters, were notably absent from the discussion.
The exploration continues in [10], where predictive methodologies regarding self-driving vehicle systems’ motion and dynamic design were extrapolated. This study progressed beyond the ordinary by considering the influence of desired environmental conditions. Planning techniques underpinned by specific software paradigms were subject to scrutiny, alongside a comprehensive assessment of constraint management within the system.
The research landscape concerning transparency and accountability in self-driving vehicles is steadily evolving. The discourse initiated by these pivotal articles [8,9,10] underscores the significance of rigorous scrutiny, comprehensive testing, and holistic planning in pursuing safe and reliable autonomous vehicle systems. In the realm of addressing non-functional requirements, specific scholarly works have transcended conventional boundaries. In particular, Akowuah et al. [11] intricated the arena of security concerns and the encompassment of security attacks. These attacks underwent a meticulous scrutiny, and the resultant challenges were meticulously articulated. A comprehensive evaluation of the criteria and test platforms transpired, exposing pertinent issues. While specific solutions accentuate system-level safety enhancements, it is noteworthy that certain safety facets remain unexplored by these solutions. It is necessary to examine scalability issues in attack investigations because of autonomous vehicles’ diverse and dynamic environments, as well as the scalability and compatibility of physical, constant-based attack detection methods for resource allocation optimization.
Moving forward, Kim et al. [12] embarked on an all-encompassing analysis of attacks targeting autonomous vehicles. These attacks were judiciously categorized, and countermeasures were subsequently established. Intrusion detection techniques were systematically explored, coupled with an in-depth investigation of design strategies underpinned by artificial intelligence solutions. While the paper encompasses an extensive scope, specific elucidation of assessment techniques and criteria could have been more present.
As part of the endeavor to bolster safety, Qin et al. [13] navigated the terrain of accident prevention concerns and the associated algorithms. The delineation of accident scenarios was derived from the vehicles’ internal architecture, hardware, and physical constituents, and a meticulous dissection of their control mechanisms ensued. However, it is pertinent to note that this investigation primarily delved into the initial layer of interior vehicle design, thereby neglecting the broader environmental parameters, communication nuances, and data collection limitations.
Addressing network and communication parameters, Ref. [14] honed in on the network-level attacks within the purview of connected vehicles. While the foundational assumptions deftly defined the landscape of connected vehicles, the paper primarily concerned itself with security matters and attacks at the network level, leaving substantial gaps in the exploring of safety issues and potential accidents. Meanwhile, Shahrdar et al. [15] garnered distinction for their comprehensive embrace of non-functional requirements, with a pronounced focus on the security and reliability management solutions within an expansive framework. This work ventured beyond the confines of convention, casting a comprehensive net encompassing tools, hardware design considerations, and, albeit to a lesser extent, communication paradigms. The comprehensive nature of this article positions it as an overarching source of insight within this domain.
Based on the collective evaluation of these works, a salient challenge in our research emerges from the thorough assessment of network-level solutions. Table 1 provides a glimpse into the core subjects explored within the body of related research.
In conclusion, these scholarly endeavors exemplify the evolving landscape of non-functional requirements exploration, with each work contributing a unique facet to the multidimensional mosaic of challenges and solutions inherent to autonomous vehicle systems.
Based on the analysis of current survey articles, it is evident that safety considerations need to be adequately explored across all the areas covered in the provided papers. Most of the discussed instances are related to security or proposed solutions. Evaluating accident prevention involves isolating external variables and relying on the overall vehicle structure. The reviewed articles present several shortcomings:
- They primarily focused on a single layer or level within the system and software design.
- Some articles must distinguish between vehicle safety and security, leading to unclear studies.
- Given the rapid growth of hardware and software in designing autonomous vehicle systems, these dimensions warrant a comprehensive examination, which needs to be improved in the previous review articles.
The study closest to our paper’s selection is [3], which conducted a systematic literature review of recent research on software verification and validation (V&V) for self-driving cars. This paper reviewed the state-of-the-art V&V software for autonomous vehicles, particularly addressing the challenges posed by leveraging artificial intelligence (AI) and machine learning (ML) for safe autonomy. The paper also identified gaps and future research opportunities in this domain. In our research, we take a broader perspective on the design of autonomous vehicles, categorizing and examining general strategies to enhance safety. Our paper encompasses safety considerations across layers, nodes, communication, and system levels. From a software standpoint, we have assessed articles spanning various levels of vehicle automation. We have highlighted two pivotal research questions concerning the evaluation tools and criteria, providing a robust foundation for designing architectures and frameworks for sensors and their hardware layer.
3. Research Methodology
Our discourse will center upon the amalgamation of the systematic literature review and systematic mapping study methodologies. We will expound upon the sequential procedures delineated within this research framework.
3.1. Research Questions
In this part, the research questions will be introduced. As mentioned in the previous works’ section, in this article, an attempt has been made to give a broader and more general view than that of other works that have been presented before. Therefore, questions are defined, some of which may have been explained in previous works, but they have been raised in this research because they require a more comprehensive coverage. This section also discusses the reasons for raising these questions in more detail. Table 2 comprises the research questions along with their corresponding rationales, which will be deliberated upon in the context of the current study:
3.2. Selection Criteria
The ensuing keywords were employed for a comprehensive database search, as depicted in Table 3.
Table 4 presents the criteria employed during the inclusion phase, delineating the process of excluding studies deemed irrelevant.
Table 5 delineates the exclusion criteria employed in the meticulous paper filtering process. As stipulated in the introduction, this article’s principal focus resides in software design. Consequently, articles needing comprehensive software dimension details were eliminated, in line with the stated limitation.
3.3. Data Sources
The selected databases were employed for the keyword searches. The papers underwent a filtration according to the stipulated criteria and were subsequently classified according to the provided taxonomy. A depiction of the referenced databases is presented in Table 6.
3.4. Search Strategy and Selection Process
We amassed survey articles about safety management and autonomous vehicle concepts, subsequently employing keywords for scouring research papers across databases. Ultimately, we meticulously sieved through our gathered documents in alignment with these predefined criteria. Table 7 illustrates the categorization of articles as per our proposed taxonomy.
The intricacies of crafting a search strategy and the process of paper selection are elucidated in Figure 2. Subsequently, in the forthcoming section of this paper, we will delve into the fundamental concepts associated with autonomous vehicles. This exposition aims to elucidate the methodologies and solutions grounded in these concepts. Figure 3 provides insights into the distribution of articles across databases and papers per database.
4. Background
To cultivate a more profound comprehension of the concepts governing autonomous vehicles, we will explore the diverse levels of automation within vehicular systems. This endeavor involves delineating the constituent’s facilitating automation and comprehensively explaining the architecture rooted in software and design imperatives.
4.1. Autonomous Vehicle Architectural and Design Concepts
A comprehensive exploration of the various designs and software methodologies employed in autonomous vehicles is imperative. This encompasses examining the underlying concepts and hierarchical levels characterizing these vehicles and integrating components that are essential to achieving a self-driving capability. Moreover, identifying the algorithms and solutions driving automated decisions across different layers is paramount. Ultimately, the available solutions are scrutinized in alignment with the requisite system and software constituents.
This holistic approach necessitates the careful consideration of all constituents to fulfill a fundamental mandate, such as vehicular coordination. The roadmap for this endeavor entails a meticulous examination of diverse levels of vehicle automation, paving the way for a subsequent exploration of components, architectural constructs, and associated functionalities. The insights gleaned from the reviewed literature will play a pivotal role in elucidating the features and parameters entailed within the proposed ideas of this article.
This section introduces diverse components that are intricately tied to their design and architectural frameworks. It endeavors to illuminate the intricate interplay between the hierarchical levels and individual elements constituting the autonomous vehicle’s landscape.
4.1.1. A Viewpoint for Autonomous Vehicles’ Architectural Components
There are two aspects to autonomous vehicles. Some resemble regular cars with wheels, steering wheels, motors, and other features. The initial differences between independent and traditional vehicles are the presence of sensors and the use of information acquired from the surroundings, other cars, road conditions, and weather conditions. These sensors collect data, and different services and applications perform based on this information. It is necessary to analyze and interpret the data after they have been collected. This interpretation includes route detection, roadblock identification, and traffic information interpretation. Different algorithms and methods are used for this processing stage. Some steps determine the decision based on the standard pattern and vehicle control. At this point, final judgments must be made to manage the vehicle in the face of diverse impediments, weather and road conditions, and the possibility of unexpected accidents. These decisions must be made according to the vehicle’s level of automation. Moreover, the route, environment, traffic, and weather conditions should be appropriately controlled and monitored for autonomous vehicles to function correctly in real time. If necessary, the appropriate decision can be implemented as soon as possible.
The primary purpose of designing autonomous vehicles was to improve the system’s performance against hazards and accidents, improve accident prevention methods, and reduce their statistics due to human faults. For this reason, safety features are required in all dimensions and views. Furthermore, various network-level operations are needed in many cases, such as sending and receiving messages at the network level, moving information, managing vehicles at the network level, and allocating resources for services and applications.
Designing autonomous vehicles requires the consideration of various environmental factors and implementation assumptions. An integral part of the design is the environmental infrastructure. The infrastructure for transferring information between cars should be supplied to make the best decisions based on environmental and sensor data. Network connections must be correctly defined for this connection and data transmission. Knowing how traffic signs and lights are defined and how vehicles react is essential. Providing this infrastructure is necessary, as the cost-of-service coverage may increase and the service responsiveness may decrease, at the system level.
Another issue is the transfer of information among nodes and other architectural layers. It is essential to protect the privacy of various people and vehicles to maintain security at the node and network levels. Different procedures and solutions must be considered at this last stage to ensure the confidence of car users. When autonomous vehicles become more prevalent, their key characteristics may be used to limit accidents and prevent financial and human losses. Thus, the general design can be considered in the following Figure for the architecture of autonomous vehicles. All the various hardware, software, and environmental aspects mentioned above are displayed. It is essential to address the challenges and constraints of the vehicle’s architecture for safety management.
Figure 4 shows an autonomous vehicle’s software requirements and general architecture based on its components; the Figure is about software and sensor implementation. Moreover, based on the proposed taxonomy, the different safety methods are shown based on the application of these components. Many methods are used in all the layers, or other parameters affecting the safety solutions are present. Therefore, safety is involved in all the different elements and layers. The vehicle’s design in question is self-driving.
Q1: What are the standard features, applications, and requirements for safety management in autonomous vehicles?
If we want to take a closer look at an example of applications, Camillo et al. [16] described how LDRA Technologies and Intland Software (Codebeamer) collaborated to create a software development process and toolchain that meets the functional safety requirements of the ISO 26262 [17] for autonomous driving systems. The paper explained how they used the following methods and tools:
- Model-based development: This method uses graphical models representing the system architecture, functionality, and behavior. The authors used MATLAB/Simulink as the modeling tool and LDRA TBrun as the model testing tool.
- Code generation: This method automatically generates source code from the models. The authors used Embedded Coder as the code generation tool and LDRA Testbed as the code analysis and testing tool.
- Application lifecycle management: This method manages the entire software development process, from requirements to deployment. The authors used codeBeamer ALM as the application lifecycle management tool, which integrates with the MATLAB/Simulink, Embedded Coder, and LDRA Testbed.
- Tool qualification: This method ensures that the tools used in the software development process are reliable and do not introduce errors. The authors used LDRA Tool Qualification Support Packs as the tool qualification method, which provides evidence of the tool’s compliance with the ISO 26262.
According to the examined example, considering the points extracted for design and architecture, we will address the general requirements and components of safety management for autonomous vehicles on the proposed taxonomy in the next section and Figure 5.
4.1.2. Hardware and Device
Various tools and sensors are used in automated vehicle systems, which we will discuss in the following categories [18,19]:
Radar sensors: Radar innovation employs radio waves to distinguish the object area. With this signal, the radar can achieve the location, speed, and heading of recognized objects, and can be used, in turn, to anticipate their future movement and path. The radar can work in a vast extent of different weather conditions.
Positioning sensors: Position sensors are a part of the navigation systems in automatic vehicles that use the geographic data of the system to accurately determine the location of the vehicle and plan decisions related to navigation and routing based on this information. This information can be used in various applications related to vehicles and intelligent transportation. It is also widely used in applications and services related to safety.
Visual sensors: As mentioned in the introduction, many decisions, routing, and detection of autonomous vehicles are made through the information obtained from sensors. Imaging sensors are among the sensors that acquire an image as a supplement to the sensor data. These pictures and videos are inputs for the algorithms and support methods for the traffic and safety management systems.
An automotive data processing chip is used for data preprocessing and management in devices and sensors. Because of processing capacity limitations, it can be used in different classified data management. These chips help with data transmission between other nodes and units. Data processing chips work on sensor data for decision-making and recommender systems for safety management in autonomous vehicles.
Actuator: After the initial collection and processing of the data collected from the sensors, it is time for the actuator tasks. These devices activate control systems, make decision units for automatic vehicles, and adjust speed, braking, acceleration, and other movement factors to maintain safety in autonomous vehicles using this data.
4.1.3. Technology
Autonomous vehicles use different technologies. One of the standard classifications is that between the communication and network technologies, on which many standards and protocols have been developed. We have considered three general categories of technology related to communication in our taxonomy:
Short-range technology: Short-range technologies are widely used to control autonomous vehicles. This technology is used for the internal communication of vehicles and the control of other system components based on the data gathered by the sensors. For this reason, its development and improvement can help improve the safety of autonomous vehicles. This technology is used for a short distance of less than 25 m, and, among it, the following can be mentioned: Bluetooth, Zigbee, and UWB [20]. This technology is widely used to detect nearby vehicles, announce collision warnings, and control braking and collision systems.
Medium-range technology: This type of communication is used for inter-vehicle communication and the communication between vehicles and infrastructure. Based on this, various standards have been defined, of which one of the most common is IEEE 802.11p/DSRC, which is used for vehicle communication [20]. In this case, the transmission range falls between 25 and 100 m, and wireless technologies are used for this transmission. One of the challenges of this is the issue of security, which is of interest due to the vehicle’s connection to other vehicles.
Long-range technology: Considering that a higher range of distance is supported in this type of communication, this type of communication is widely used in traffic and safety management systems, as well as for V2X communication. One of its most significant characteristics is the data transmission between different nodes and layers, and some challenges have arisen from this type of communication, like privacy and security, and the delay in message transmission and real-time response from emergency services.
Various technologies are used to overcome the challenges mentioned regarding communication and network, as well as safety, security, and privacy, management. In many cases, safety and security have a narrow border with each other, and, in some attacks and risks, by improving security, protection also increases. In many standards, cyber-security attacks and threats have been identified, their coverage has been reviewed, and much research has been presented in these fields. By reducing the risks, and the risks related to them, safety at the level of vehicles also increases, which will be mentioned in detail with respect to this category of articles. Also, Big Data management solutions make traffic and accident management easier in automated vehicles. Since both data types are collected and the volume of data that may require filtering or preprocessing is uncertain, many data management solutions are designed to respond in real time to driver-assistance services. The Internet of Things is also used to manage the communication of vehicles with each other and control units that facilitate the collection, decision, and creation of warnings based on the data collected and provide the possibility of communicating with different types of vehicles. Many artificial intelligence algorithms and methods are also used to manage safety at the level of vehicles and prevent errors, which will be fully categorized for the proposed articles.
4.1.4. ISO Standard and Protocol
The ISO 26262 is very important for safety management in autonomous vehicles. The main idea of this standard is based on the needs of the electrical and electronic components related to vehicles and roads, and it addresses challenges such as the safety needs and the software needs related to electronic components, which have become very important due to the software vision of our article [21]. It also examines the risk of software and system errors, as well as hardware errors. It investigates the complexity, software design, and various attacks at the system level, elements which have been selected due to the categories used in the articles.
The ISO 21448 [22] complements the existing standards and addresses the safety of self-driving vehicles in emergencies. Intentional alteration to the system operation is considered feature abuse and is not in the scope of this standard.
The ISO/SAE 21434 [23] defines the requirements for managing cybersecurity risks for road vehicles and their components and interfaces.
The IEC 61508 [24] is another common standard for safety requirements in vehicles. It is suggested for software design and conditions at the system level. It is used for safety balancing and integrates different software operations and maintenance levels. Because of our classification, we provided one of these classifications for architecture-based methods. This standard can be examined at various levels of the system.
4.1.5. Application
Many functional systems are used fully automatically or semi-automatically in automatic vehicles, and, in the following section, we will introduce some examples of them and their applications in safety management.
Advanced driver-assistance systems (ADAS): it improves road safety. Using various sensors and algorithms, ADAS technology predicts possible collision risks and issues warnings to the driver.
Google self-driving: Waymo was created in 2009 as Google’s self-driving car project for improving road safety. Its prototype was presented in 2015, offering services such as minivans, self-driving taxis, and fully automated vehicles to the public. This vehicle has many programs for safety management, defines safety in multiple aspects, including design, operation, and human training for use, and improves safety through the services provided [25].
Fully autonomous shuttle: It is a fully automated type of vehicle. It uses sensors and software for terrific vehicle management. Fully autonomous shuttles have the potential to improve mobility, safety, and sustainability in urban and rural areas by reducing congestion, emissions, and human errors. They can also provide better access and convenience for people who cannot or prefer not to drive. It detects obstacles, collisions with other vehicles, and pedestrians for safety management [26].
Autonomous metro train: It can operate without a driver. It uses sensors and software systems for speed and movement control. It can reduce human errors and costs in transportation systems. The system controls all the components and factors such as speed, braking, and acceleration, and improves safety. Sensors monitor all the surrounding environmental features, and interactions are scheduled [27].
Cruise: Cruise is a subsidiary of General Motors, developing fully autonomous vehicles that can operate without a human driver. It uses sensors, including lidar, radar, and cameras, to perceive the environment and navigate complex urban scenarios.
Tesla: Tesla deployed semi-autonomous vehicles that use a combination of cameras, radar, ultrasonic sensors, and neural networks for “Full Self-Driving”. It can perform tasks such as lane keeping, lane changing, adaptive cruise control, self-parking, and navigating in urban scenarios.
Autonomous Electric Helicopter: The goal is to make the ships more powerful and capable using intelligent sensors with helicopters. The helicopters can spy on their targets and guide the vessel to the right places. The sensors make ships and helicopters faster and more sustainable [28].
In Figure 5, a taxonomy of methods, parameters, applications, and technology used in the safety management of automated vehicles is presented, the first parts of which are described; the remaining details will be further explained based on the methods of the selected articles and their categories.
5. Result
5.1. Studies Characteristics
Q2: Which methods and approaches are used to characterize safety in autonomous vehicles from a software point of view?
Based on the analysis of the selected articles, a comprehensive classification framework for the presented methodologies can be proposed as follows.
The initial category pertains to solutions that approach autonomous vehicles through the lens of software design and diverse system layers. This category introduces a suggested architecture encompassing all elements delineated within the independent driving domain. The subsequent type adopts a parametric perspective, leveraging distinctions in environmental and design parameters expounded upon in the preceding section. This approach is equipped to tackle challenges intrinsic to the system and software by leveraging mathematical models. Another subset delves deeper by addressing components pivotal to error management within self-driving systems. These contributions furnish solutions geared towards enhancing the fault tolerance of autonomous systems, consequently elevating the safety levels in self-driving vehicles. In parallel, a distinct group focuses on managing accidents across varied routes, proffering solutions centered around traffic management within the context of self-driving vehicles.
Safety in vehicles has different aspects. One of these involves traffic management and the routing of vehicles, which must be observed in all vehicles, including classic, self-driving, and connected, and controls the occurrence of accidents. On the other hand, for self-driving vehicles, it is necessary to consider all environmental and non-environmental parameters in the design and specify the design of their components. On the other hand, if a fault occurs in the vehicle’s control systems, there must be management or fault tolerance in place to avoid accidents. Therefore, we categorize different solutions along this direction.
Figure 6 visually encapsulates the solutions’ distribution across the reviewed articles, contextualized within the proposed taxonomy and classification scheme.
5.1.1. Safety-Based Architectures and Frameworks
As indicated in the preceding section, the fundamental blueprint of autonomous vehicles diverges from traditional vehicles, encompassing an array of distinctive components. Sensors emerge as pivotal components as they supply the requisite data for the operation and decision-making of autonomous vehicles. Concurrently, data exchange and seamless network communication are imperative prerequisites for facilitating effective interconnectivity within this paradigm. Considering these dynamics, a holistic exploration of comprehensive solutions spanning all vehicle components becomes paramount.
Furthermore, many methodologies extend their scope to encompass environmental factors and other network constituents. This section serves as a platform for dissecting methods and architectures that encapsulate the full spectrum of architectural attributes inherent to the entire system.
Upon scrutinizing the pivotal aspects that underscore establishing a secure architecture for autonomous vehicles, a convergence of common concerns and limitations becomes apparent [29]. Several critical problems emerge when addressing the establishment of a robust architecture for autonomous vehicles. These include the following:
- Heterogeneous System Structure: The inherent heterogeneity within the system structure is a paramount consideration. Given the diversity in technologies and communication standards across vehicles, a comprehensive solution must be able to effectively manage this diversity. Clarity in addressing this issue is crucial when defining any proposed solution.
- Network-Level Data Exchange: The data exchange at the network level introduces the challenge of network standardization, communication capacity, and reliability. Effective data exchange is pivotal, as failure in this realm can exacerbate the occurrence of accidents and hinder the overarching goal of intelligent vehicle design.
- Comprehensive Component Coverage: In the architectural design of vehicles, it is essential to account for the roles played by all system components. A holistic perspective should be maintained to ensure that all facets of the system are adequately considered.
- Impact of Vehicle Movement and Routing: The movement, positioning, and routing of vehicles significantly influence the potential for accidents either involving other vehicles or mobile/static environmental obstacles. These factors must be factored into the architectural design.
- Control Solutions: Control solutions are imperative for individual and holistic system components. Effective control mechanisms ensure optimal operation and coordination within the autonomous vehicle ecosystem.
- Urgency and Reactivity: The agility of guarantees and the ability to respond swiftly to unforeseen events and accidents are paramount. The architecture of a vehicle must facilitate rapid responses to ensure safety in dynamic situations.
Addressing these multifaceted concerns in designing and implementing an autonomous vehicle’s architecture is pivotal for fostering a safe and efficient self-driving ecosystem. Considering the issues above, the architectural articles within the field can be categorized in several ways. Some articles identify critical architectural design criteria while delving into the intricacies of hazards and necessities that are inherent to a secure architectural design. Comparable to the architecture of other complex systems, specific articles centered on vehicle architecture design adopt a systematic approach. They encompass requirement gathering, risk assessing to ensure safety, and the extracting of pivotal and generic attributes to prevent accidents. For instance, in [30], the authors delved into the domain of safety management across various hierarchical levels. Their methodology involved leveraging augmented intelligence to construct safety models rooted in data characteristics. This approach guaranteed data quality and reliability, critical factors underpinning a robust safety architecture.
Another contribution, showcased in [31], is risk management. The article employed advanced reinforcement learning techniques to handle risk management patterns associated with vehicle safety breaches. Decisions made within autonomous vehicles hinge on a risk model, whereby actions are determined based on minimizing risk. Notably, the complexity of algorithms and the allocation of resources at the network level are optimized to accommodate the limited processing power inherent to vehicles. This optimization contributes to an enhanced safety profile. Unforeseen environmental events fail to receive mention, and specific parameters derived from this context are excluded from the pattern extraction process.
Khan et al. [32] contributed a conceptual model aimed at dissecting the risks intertwined with cybersecurity and, in the process, enhancing overall security and safety. This publication introduced various factors crucial for modeling the system’s evolution over time. This approach considered multiple elements, including human factors and regulatory guidelines for overseeing vehicle performance management. Given the undeniable significance of these parameters in safety management, security control, and cyber challenges at these strata, the model can markedly alleviate vehicle safety management. Nonetheless, it is pertinent to highlight a primary limitation evident within this work.
Within the array of approaches, a subgroup adopts a process-based methodology. This category endeavors to encapsulate the entirety of the autonomous vehicle system, encompassing facets ranging from vehicle motion to the intricacies of traffic management. At the level of individual routes, interactions spanning autonomous vehicles and their environmental counterparts, including automated and traditional vehicles, pedestrians, and workstations, are meticulously modeled, as evidenced in [33]. This particular work introduced a multi-step framework tailored for traffic management. This framework is predicated on distilled requirements, thereby facilitating the execution of traffic modeling. By meticulously evaluating the parameters affiliated with each vehicle, the system is equipped to issue warnings in the presence of potential safety hazards. This framework also serves as a platform for simulating various vehicle communication scenarios, incorporating diverse communication protocols. The underlying implication is that real-world issues within the system can be effectively addressed by identifying and resolving commonplace methods.
On a different note, some researchers have concentrated on architectural designs rooted in component and environmental prerequisites. However, their coverage has not permeated all system layers nor delved into software design as extensively. This theme is encapsulated by [34], which is centered on vehicle communication and networking. Notably, cryptographic algorithms have been developed as part of this work to safeguard individual privacy while concurrently thwarting attacks and preserving the integrity of information. The authors grapple with a delicate balance between security and privacy concerns. Notably, this paper is underpinned by the adoption of the 5G communication protocol. As a result, one of the inherent drawbacks of this research is its communication protocol limitations. Factors such as network capacity, message transmission and reception delays, and network architecture warrant consideration when selecting encryption methods. A comparative analysis encompassing encrypted and unencrypted approaches was executed, ultimately favoring the proposed plan due to its heightened security. This shift corresponded with an increase in the correlation coefficient of the transmitted messages, consequently bolstering their overall security efficacy.
In article [35], the 5G standard is positioned as a communication system standard, albeit with limitations that curtail its real-world applicability. Nonetheless, it does exhibit advancements when juxtaposed with the preceding methodologies. Notably, this approach operates effectively in the context of diverse traffic types. Moreover, the criteria encompass multifaceted aspects such as vehicular mobility, geographic positioning, and the imperative of safeguarding data privacy. The delineation of architectural constraints and associated parameters encompass a spectrum of limitations, spanning communication boundaries, resource allocations, and the dissemination of informational messages. However, it is crucial to acknowledge that, despite these efforts, a residual shortcoming exists, potentially tempering the architectural prowess of real-world data applications. As alluded to earlier in this paper, certain articles are deliberately designed to encompass the realm of networking and communications.
Nonetheless, an equally pivotal facet is the demand for dependable data and seamless network mobility. Passerone et al. [36] focused on data reliability and enhancing vehicular safety. Within the confines of this article, the focal point is vehicular communication, emphasizing standardizing and fortifying the exchange of data and signals. This endeavor is underpinned by a prudent consideration of diverse factors, encompassing the geographical and environmental contexts of the vehicles, the range of services rendered, and the nuances of information interchange. These contextual elements are the foundation for formulating pertinent parameters and evaluative criteria. Wan et al. [37] introduced a comprehensive architecture structured around discrete components. At the heart of this architecture lies an acute focus on localization, prominently leveraging deep learning techniques to facilitate the precise identification of autonomous vehicles. A unique hallmark of this methodology is the simultaneous measurement of inter-vehicle distances, serving as a cornerstone for constructing the overarching system architecture. Beyond just localization, the architecture is conceived to incorporate supplementary parameters that encompass diverse dimensions. This entails the potential integration of communication capabilities, including conventional vehicles, and the holistic incorporation of automobile issues.
The central theme explored in article [38] revolved around utilizing a vehicle-centric framework integrated with machine learning algorithms. This framework served as a conduit for deploying a predictive model designed to mitigate the incidence of malicious attacks and communication aberrations while enhancing overall safety and security. A notable facet of this study lies in its practical implementation, wherein two distinct modules, namely, acceleration reduction and feedback registration, are harnessed. These modules exhibit a commendably high level of predictive accuracy, facilitating the anticipation of vehicle acceleration patterns and movement trajectories by analyzing incoming data.
A noteworthy outcome of this research is the realization of a simulation-based approach characterized by its robust performance metrics in predicting anomalies and potential collisions. Notably, the authors employed a diverse simulator to assess the efficacy of their proposed approach. However, it is important to highlight that using various simulators could introduce complexity to future investigations within this domain. In the subsequent section, drawing upon the stipulated prerequisites and the comprehensive review of the articles above, we embark on a comparative analysis of the disseminated papers, focusing on their architectural attributes and highlighting their merits and limitations.
As depicted in Table 8, the juxtaposition of these articles is meticulously organized, aligning with the context of secure vehicular architectures. Within this framework, it is discernible that performance metrics and temporal considerations play a pivotal role in assessing the scrutinized methodologies. The design underpinnings of several of these approaches conspicuously integrate the intricacies of communication dynamics, networking paradigms, and the accompanying protocols that govern them. Our comprehensive evaluation systematically elucidated these distinctive attributes, scrutinizing their positive facets and corresponding drawbacks. In Figure 7, methods are classified based on the parameters covered.
As we saw in the analysis of the articles, about eighty percent of the articles have used solutions based on artificial intelligence in the design. The articles’ comprehensive review and meticulous research have unveiled a distinct imperative: pursuing an all-encompassing system-safety framework demands a more diversified exploration of safety methodologies. While the previously discussed processes bear intrinsic value, it is evident that there is a critical need for the incorporation of supplementary safety measures to realize a comprehensive and universally practical system-safety approach.
In light of the methods elucidated earlier, certain crucial aspects necessitate further investigation to ensure a robust system-safety paradigm. Specifically, the domains of traffic management and the inherent performance of the system emerge as paramount considerations. These elements play a pivotal role in proactively averting the occurrence of errors that have the potential to escalate into road-level accidents. However, the extant methodologies must address these dimensions more adequately, or their applicability across diverse conditions remains tenuous.
In response to these identified gaps, we are poised to delve deeper into these critical issues within the forthcoming sections. By embarking on a comprehensive exploration of traffic management strategies and enhancing system performance to mitigate error-induced hazards, our objective is to contribute significantly to augmenting the existing knowledge. This endeavor aspires to pave the way for a more inclusive, adaptable, and resilient system-safety paradigm that transcends limitations and encompasses many real-world conditions.
5.1.2. Fault-Management Approaches
As elucidated earlier, enhancing safety at both the node and system levels manifests as a strategic imperative to fortify the security of roads and vehicles. Notably, the difficulty of sensor data collection surfaces as a critical consideration. The successful acquisition and interpretation of sensor-generated data wield profound implications for the vehicle’s overall safety and interaction with its environment.
In the endeavor to comprehend the critical faults afflicting vehicles, it is judicious to categorize them into distinct classes. These may include faults from environmental conditions, road characteristics, and weather variables. It is incumbent upon vehicles to react with precision during these circumstances, making determinations that encompass a spectrum of driving parameters. These responses are pivotal in forestalling the materialization of accidents and ensuring the safety of the occupants and surrounding entities.
Indeed, an additional category of faults arises from the malfunction or breakdown of a vehicle’s internal sensors or components. Typically, such issues can be preemptively addressed through robust control and monitoring systems, which can detect anomalies and facilitate the replacement of faulty parts. This proactive approach maintains optimal vehicle performance and minimizes the potential for accidents stemming from internal malfunctions.
Another cluster of errors emerges from traffic accidents and obstacles that inevitably manifest on the road. These challenges can be effectively managed through various solutions, encompassing collision avoidance mechanisms and predictive fault-detection strategies. Imagine a scenario where an accident or unexpected obstruction materializes along a vehicle’s path. In this context, the vehicle can receive pertinent data and respond cautiously. Conversely, if a fault or issue transpires, the vehicle’s ability to predict and appropriately respond promptly is critical to preventing an escalation of the problem, as the unchecked progression of such conditions could ultimately lead to system failure.
In this study, the assessment of risks and their corresponding positions is effectively embedded within the control technique. The quantification of risk severity plays a pivotal role in categorizing risks, allowing for a nuanced understanding of their potential impacts. Moreover, this approach delves into risk management tasks’ time, velocity, and acceleration aspects, providing a multifaceted view of potential hazards.
However, it is noteworthy that, while this approach is robust in its coverage of various risk dimensions, it does not explicitly incorporate environmental factors. This could be a potential limitation as environmental conditions often significantly influence the risk landscape. Furthermore, the study alludes to the deployment of brake management systems, but the testing of these systems under diverse environmental and climatic scenarios still needs to be explored.
The insights gleaned from studies like this are instrumental in shaping the contours of fault-management parameters. By comprehensively addressing risk analysis and assessment, they pave the way for the formulation of precise strategies that contribute to the effective management of faults and, consequently, the enhancement of overall system safety. Leveraging insights from risk analysis within the system, a cluster of articles has discerned influential parameters within the environment and nodes. These parameters are the foundation for formulating fault-control solutions strategically tailored to address potential vulnerabilities. An illustrative example lies in [39]. Their approach entailed endorsing a fault-tolerant control strategy that focused on path following within vehicles. This innovative solution is meticulously designed to manage and predict potential vehicle faults and account for external environmental factors, such as road curvature.
Biddle et al. [40] focused on an in-depth examination of sensors and the various factors influencing their performance. The study extended its purview to encompass predicting potential faults in these sensors. The study meticulously detailed a comprehensive approach aimed at mitigating sensor faults. The underlying methodology comprised steps surrounding defects, isolating compromised sensors, and creating modules geared toward prediction and fault detection. In this context, a support vector machine (SVM) is employed to discern errors. Signal streams from the sensors are diligently monitored, enabling the detection of deviations and anomalies that signify potential errors. These deviations are subsequently scrutinized and classified based on the behavioral attributes of the signals. The frequency amplitude property is critical in differentiating standard and erroneous signals, serving as a central discriminator. This property’s characteristics play a pivotal role in identifying and delineating anomalies within the signal data.
Undoubtedly, sensor malfunctions or problems constitute one of the paramount factors that can lead to system faults and, in more extreme cases, result in crashes within autonomous vehicles. This complex issue has garnered significant attention across many articles, including the reference above [41]. This paper focused on the electronic control units within sensors, presenting a nuanced strategy to mitigate the impact of sensor-related challenges. The essence of this methodology lies in its proactive nature, aiming to predict potential sensor-related issues and safeguard the continued operation of autonomous vehicles, even when a fraction of sensor capacity is compromised. This anticipation-driven approach is geared towards ensuring not only the functional continuity of the cars but also their safety. The methodology within this study unfolded in a structured manner. The initial level involved a meticulous inspection of the hardware and components constituting the sensors. During this stage, potential errors were systematically categorized based on their characteristics. Furthermore, given their sensor capacity, an assessment was conducted to ascertain how vehicles performed in accident scenarios.
One of the pivotal features of this approach involves the handling of critical sensor failures. A contingency strategy is adopted to circumvent disruptions in system performance. This method entails incorporating backup units when essential failures of sensors are detected. By integrating these redundant units, the system’s overall functionality remains intact, bolstering the vehicle’s ability to navigate effectively and ensuring higher safety. In essence, the approach outlined in this paper reflects a comprehensive endeavor to mitigate sensor-induced faults and enhance system safety within autonomous vehicles. The method contributes to a more resilient and robust autonomous vehicle ecosystem through the proactive prediction, the categorization of errors, and the strategic implementation of backup units. Undoubtedly, several studies have ventured beyond the surface to explore the intricate scenarios that could engender errors within autonomous vehicles.
Moreover, these studies have risen to the challenge of devising holistic system-level solutions that optimize data transmission and communication. An illustrative instance of this progressive approach can be observed in [42]. The central focus of this research lies in addressing the multifaceted nature of data within autonomous vehicle systems, a pivotal aspect that underpins their functionality. At the crux of this study is the proposition of a comprehensive solution to manage the intricacies of multidimensional data. The inherent significance of this approach rests in its ability to accommodate the expansive and diverse data streams inherent to autonomous vehicle operations. Scalability and real-time data computation emerge as cornerstones, ensuring that the system can handle the dynamic influx of data streams while concurrently processing them in a time-sensitive manner.
Furthermore, the research extended its purview to encompass fault detection within the data domain. This emphasis on data integrity and accuracy is essential to preempting errors rooted in incorrect information. Detecting and rectifying data errors is an integral component of this strategy. Specifically, the proposed method involves clearing information from designated camera areas within the autonomous vehicle’s surroundings and rectifying distortions within each data frame. The system is poised to operate with a higher degree of reliability by eradicating these inconsistencies and inaccuracies.
In essence, this study represents a forward-looking endeavor to optimize data processing within autonomous vehicles. By proposing scalable solutions for multidimensional data management and incorporating robust fault-detection mechanisms, the researchers contributed to a more effective and dependable autonomous vehicle ecosystem. Parseh et al. [43] brought attention to a novel and significant subject that has yet to undergo exhaustive exploration. The focus here centered on collision reconfiguration systems within autonomous vehicles (AVs), introducing fresh demands for comprehensive accident analysis. This paper entailed formulating innovative safety surrogate measures (SSMs) that account for the frequency of accidents and incorporate considerations of severity. Additionally, the article delved into the need for recording the trajectories of traffic instances that closely approach collisions. This trajectory data served as a basis to identify analogous scenarios and uncover concealed variations in these situations, contributing to a more nuanced understanding.
Park et al. [44] strongly emphasized accident prevention, explicitly targeting collisions involving vehicles and barriers. In contrast to the previous article, which concentrated on collision reconfiguration systems, this study took a proactive stance by addressing potential collisions with other moving vehicles. Parameters such as acceleration, speed, distance, and static obstacles form the crux of the investigation. This approach aims to comprehensively understand each vehicle’s trajectory, facilitating the identification of potential collision points. Moreover, the study acknowledges the potential significance of environmental conditions and the information derived from vehicle-to-vehicle (V2V) communication. These factors can be incorporated into the model’s development parameters, enhancing its predictive capabilities and fortifying the safety mechanisms.
Zhu et al. [45] focused on predicting and preventing errors within autonomous vehicles. This study is devoted to the critical aspect of risk assessment, focusing on control strategies. Notably, what sets this article apart is its utilization of supervised learning algorithms underpinned by a Bayesian model. This dynamic and realistic approach promises to predict the occurrence of risks and discern their severity levels in real-time. The relevance of this advancement becomes particularly apparent in the context of self-driving cars. By enhancing the prediction and assessment of risks, this methodology contributes to optimizing the vehicles’ performance in the event of potential collisions. The process involves aggregating, categorizing, and utilizing route and environmental data to classify various levels of risk. Importantly, this approach is not confined to theory but has been employed in various networked autonomous vehicle applications. The extraction of risks hinges on the integration of environmental and vehicle-specific data. Through this integration, the methodology determines the probability of risk occurrence at the lowest layer, the vehicles themselves, and their interrelationships.
The outcomes of this predictive approach are quantified in terms of impact parameters and risk levels. These outputs hold significance as they form the basis for accident prevention and safety management across different tiers of autonomous vehicles. The research employed simulations rooted in real-world data to substantiate the efficacy of this approach. As a potential avenue for further enhancement, integrating real-time data such as weather patterns and temporal parameters could enrich the methodology’s responsiveness and ability to address dynamic scenarios.
In summary, Biddle et al. [40] offered an innovative approach to risk assessment, prediction, and prevention within the domain of autonomous vehicles. By employing advanced learning algorithms, Bayesian models, and real-time data, this research advances state-of-the-art autonomous vehicle safety with the potential for even more terrific refinement by incorporating additional real-time factors. In addition to tackling the crucial realm of vehicle collisions, researchers have delved into the cost-related aspects and navigated the challenges of vehicle communication. The study referenced as [46] is particularly notable in this context. The complexity of previous techniques is mitigated by introducing an optimized acceleration and speed control method, yielding improved real-time performance. This optimization not only addresses cost-related concerns but also enhances the overall efficacy of the approach.
Moving on to article [47], a different perspective is adopted—one that centers on obstacles. This study ventures into the domain of online verification and diagnostics systems tailored for vehicles. The core function of this system is to evaluate the presence of static barriers along a given route and predict their impact on the vehicle’s trajectory. This predictive model is a certification mechanism to ascertain whether the vehicle can safely proceed along its intended path. An intriguing facet of this method is its vehicle-agnostic nature. Irrespective of the vehicle type, the system leverages parameters such as time, speed, acceleration, and road conditions to determine whether the vehicle can safely proceed along its intended path. This holistic approach ensures that the predictions are adaptable to various vehicle scenarios.
Cui et al. [48] uniquely navigated the intersection of safety and security concerns within autonomous vehicles. Enhancing network and data security contributes to reducing system errors while simultaneously fortifying the defense mechanisms against potential attacks. The outcome is an elevated level of protection that permeates both autonomous and traditional vehicles.
When surveyed collectively, the array of articles sheds light on the multifaceted nature of fault management within autonomous vehicles, spanning diverse levels and perspectives. The subsequent endeavor involves categorizing the identified parameters and embarking on a comparative analysis of the reviewed articles, contributing to a comprehensive understanding of the broader landscape of fault-management strategies and methodologies. The article’s fault-management landscape can be categorized into two overarching groups: node-level error management and system-level error management. Within these categories, a cluster of papers has honed in on environmental and vehicle attributes to devise comprehensive solutions. Addressing vehicular limitations such as mobility constraints, resource boundaries, and the necessity for swift responses has been pivotal to enhancing these approaches.
This section serves as a comprehensive analysis of fault-management methodologies. The efficacy of these strategies hinges on critical factors such as the success rate in detecting faults, service response time, and overall reliability. Many of these strategies are predicated on delineating parameters across different architectural layers. These parameters play a central role in optimizing the fault-management processes.
As articles are surveyed, they can be organized and evaluated within the framework of the categories above. Examining the advantages and disadvantages inherent in these methodologies informs the crafting of refined and effective fault-management strategies. A comparative analysis is presented in Table 9, where the articles are categorized and evaluated based on the mentioned criteria to facilitate a comprehensive understanding of this landscape.
By categorizing and evaluating these articles through the lens of node-level and system-level error management while considering environmental and vehicle factors, the groundwork is laid for a deeper comprehension of fault-management strategies. This analysis is a roadmap to ascertain the most effective and adaptable approaches within autonomous vehicle systems.
5.1.3. Safety Parametric Models
Leveraging a mathematical model and a multi-objective function is a common approach to enhance the quality attributes of autonomous vehicle systems. Numerous articles on vehicle safety and other associated challenges, spanning cost management, barrier mitigation, and service provision, delve into these complexities and safety concerns. This section of the analysis examines the utilization of mathematical models within the context of autonomous vehicles and mixed traffic scenarios. By outlining these techniques, we lay the groundwork for the subsequent classification of variables and methodologies. It is necessary to consider various parameters such as technical limitations, environmental and traffic restrictions and requirements, and physical limitations in determining vehicle safety models [49]. For this reason, many methods have extended into parametric modeling.
Indeed, mathematical models have emerged as a foundational tool in pursuing safety improvements. Jiang et al. [50] presented an optimal multi-objective function that extends beyond the parameters directly linked to accidents. This function considers the temporal dimension, precisely traffic intervals, within the mathematical framework. The overarching objective of this model is to minimize casualties over an extended period. This nuanced approach optimized the balance between accident prevention and temporal considerations. As demonstrated by the example in [50], the holistic approach captured in these models underscores the multi-dimensional nature of safety optimization. This mathematical lens allows for a more precise analysis, potentially paving the way for more effective safety interventions and strategies.
Ref. [51] adopted a distinct focus on the risks inherent in the decision-making processes of autonomous vehicles. This study comprehensively evaluated risks, drawing on environmental criteria and risk classification to construct a robust risk model. This model considers a broad spectrum of risk categories encompassing life and road hazards and environmental and financial risks. A critical consideration emerged from the dynamic nature of these risk categories. As environmental conditions and legal regulations evolve, risk assessment criteria may change. Consequently, the priorities and weights attributed to different risk categories could shift. This fluidity necessitates regular revision and updates to a model’s measures to ensure its relevance and accuracy.
Papadoulis et al. [52] provided a testament to the application of intelligent algorithms to enhance vehicle safety through a multi-dimensional approach. Integrating environmental and systemic factors, combined with vehicle speed as a pivotal feature, showcases the depth of consideration undertaken for safety optimization. Testing the model across varied traffic scenarios further bolsters its practical relevance. However, omitting certain factors like day-night conditions and weather warrants acknowledgment and potential avenues for further investigation.
In enhancing the safety of connected autonomous vehicles (CAV), Jo et al. [53] introduced a pioneering approach through a probabilistic modeling framework to address cyber-attack challenges. Their model centers on two vital sub-systems: a perception system and a safety monitoring system. These sub-systems facilitated identification across various vulnerability modes. The model’s foundation lies in assessing the probability of cyber-attacks targeting the perception system and safety monitors, and the likelihood of encountering false alarms. However, crucial aspects like missed detections, the potential for successful attack recovery, and the probability of collisions were notably absent from the model’s consideration.
Shifting our focus to article [54], the authors’ primary objective was collision prevention and safety maintenance within self-driving vehicles. This paper introduces a theoretical model for the minimum safety distance required to avert collisions. The model’s formulation draws on critical variables such as the vehicle’s lateral acceleration, turning speed, route management, and lane change dynamics. The model’s versatility yields success across various scenarios, effectively preempting accidents. There remains room for refinement to align it more closely with real-world complexities. This could improve its accuracy and realism, particularly concerning scenarios beyond controlled environments. Additionally, time-related parameters, such as customer reaction times, are introduced into the model, amplifying its applicability and realism.
In summary, Ref. [55] adopted a probabilistic modeling approach to tackle cyber-attack challenges in the context of CAV safety. The model encompassed sub-systems, but certain elements require further integration, such as the possibility of missed detections and collision probabilities. Meanwhile, Ref. [54] contributed a theoretical model for collision prevention and safety in self-driving vehicles, demonstrating its versatility in various scenarios. Nonetheless, refining the model’s realism and accounting for real-world complexities remains an ongoing challenge. Including time parameters like customer reaction times bolsters the model’s practicality.
Table 10 provides a comprehensive overview of various aspects gleaned from the reviewed papers. These methodologies predominantly focus on elevating the safety of vehicles, and they typically adopt a parametric model approach. However, it is essential to recognize that the complexity of their implementation warrants careful consideration, especially concerning their applicability across different layers and conditions.
In summary, fault management is a linchpin in system performance within the automation domain. Its application is particularly pronounced at specific levels of automation. While often adaptable across levels, the overarching methodologies demand consideration of implementation complexity. Evaluative measures, encompassing cost, responsiveness, and success rates, play an indispensable role in gauging these methods’ real-world feasibility and utility. The subsequent table elucidates the nuanced landscape of advantages and disadvantages, encapsulating the essence of these methodologies in pursuit of enhanced vehicle safety and performance.
5.1.4. Traffic Handling Approaches
Indeed, the models and architectures proposed in the reviewed papers demonstrate a commendable effort in accounting for a wide array of parameters pertinent to environmental conditions and the unique characteristics of autonomous vehicles. While specific methodologies have incorporated provisions to encompass conventional vehicles, the intricate landscape of traffic management serves as a vital complement to these approaches.
Traffic management operates as a linchpin in bolstering the efficacy of these methodologies. The complexities associated with changing lanes, traffic volume fluctuations, static and dynamic obstacles, and road conditions ranging from turns to varying traffic dynamics can significantly influence the safety of vehicles on the road. In essence, traffic management is pivotal in harmonizing the interactions between conventional and autonomous vehicles, ultimately enhancing the overall safety of the ecosystem.
As a result, the focus will now shift towards discussing methodologies explicitly tailored to traffic management while considering autonomous vehicles’ unique characteristics and requirements. This encompasses a holistic approach that emphasizes the vehicles and the broader context of traffic conditions and interactions. This discussion will further underscore the interconnected nature of the autonomous vehicles’ ecosystem and the larger traffic environment in which they operate. By effectively navigating the intricacies of traffic management, the potential to maximize safety outcomes is enhanced, creating a more harmonious and secure driving landscape for all road users. Both road and urban traffic exhibit a dynamic nature, requiring multifaceted approaches to analyze their complexities. Time parameters emerge as crucial facets in predicting traffic patterns. Urban areas, for instance, witness distinct busy hours that must be accounted for in any forecasting model. On the roadways, vehicle speed and inter-vehicle distance hinge on traffic volume. Unlike a fixed pattern, traffic lacks a static structure. Environmental conditions, temporal considerations, systemic dynamics, and infrastructural attributes shape it.
Weather conditions substantially influence traffic patterns, yet, this factor needs to be consistently integrated into many solutions. Vehicle speeds are variable and subject to a combination of local regulations, driver decisions, and the performance of self-driving vehicles. Further complicating matters, the uncertainty surrounding traffic situations amplifies the challenge of crafting accurate and responsive traffic management strategies. Traffic management within self-driving vehicles is a complex endeavor, necessitating a comprehensive approach that embraces the intricate interplay of various factors. The dynamic nature of traffic, the diverse influences shaping it, and its inherent uncertainty underscore the multifaceted landscape that traffic management methodologies must navigate. The ultimate goal remains the creation of systems that can effectively anticipate, respond to, and mitigate the challenges posed by dynamic traffic environments, thereby contributing to enhanced safety and efficiency within the autonomous vehicles’ ecosystem.
Indeed, rapid response and adaptive strategies in the face of accidents or collisions are paramount considerations in autonomous vehicles. Various articles within the reviewed literature have strived to elucidate the parameters that influence the safety of vehicles, paving the way for the development of robust and adequate safety measures.
Qin et al. [13] delved into the intricate web of parameters that impact vehicle safety, particularly within the context of autonomous vehicles. This research focused on a broad spectrum of parameters, encompassing aspects of the vehicle’s environment, internal conditions, and obstacles. This methodology tackled the challenge of accident prevention through a multifaceted approach. This approach commences by introducing critical parameters like acceleration and speed, which are pivotal in dictating the vehicle’s behavior in response to dynamic circumstances. This step requires the intricate management of speed based on the permissible limits within a given environment, while accounting for unforeseen events. Beyond external influences, the model delves into the vehicle’s internal design elements. Factors like engine speed are intricately tied to acceleration characteristics, with their impact reverberating through the vehicle’s behavior. Ensuring the reliability of the data fed to the vehicle’s sensors, effectively addressing any noise in the data, remains paramount to the success of this safety-oriented approach.
Approaching obstacles warrants a nuanced strategy to ensure the safety of vehicles, and Zhu et al. [56] offered a methodology rooted in reducing engine speed and, where feasible, a change in the vehicle’s trajectory. This simulation framework employs the Controller Area Network (CAN) protocol, which finds widespread application in industrial and automated contexts. However, using the CAN in this context introduces limitations that impact the method’s comprehensiveness and real-world applicability, particularly within mixed traffic scenarios involving conventional vehicles. Incorporating the Internet of Things (IoT) and the CAN protocol aligns with prevalent practices in industrial settings. However, this application’s limitations are evident when extrapolated to a real-world automotive environment characterized by mixed traffic. The constraints of the CAN protocol restrict its ability to capture the intricate nuances of a vehicle’s surroundings, limiting its efficacy in scenarios involving both autonomous and conventional vehicles.
Mixed traffic environments necessitate a more versatile and generalized protocol to accommodate the diverse communication needs of various vehicle types. While the article’s approach capitalizes on specialized sensors to detect obstacles nearby, its mode of operation—coming to a complete stop before rerouting—introduces potential safety risks for conventional drivers sharing the road. Conversely, this methodology boasts energy efficiency, as well as cost- and resource-reduction advantages, for autonomous vehicles. The autonomous vehicles in question benefit from optimized energy consumption and resource allocation by avoiding diversion risks and challenges.
In essence, Kosari et al. [57] embodied the fusion of cutting-edge machine learning techniques with the intricacies of pedestrian and vehicle recognition. Utilizing the SqueezeNet algorithm, this methodology attains impressive accuracy levels while minimizing data transmission delays. This characteristic highlights the potential of machine learning in optimizing safety and efficiency within the autonomous vehicle landscape, thereby contributing to the broader objective of creating a secure and responsive driving environment.
The researchers have formulated an algorithm to manage the trajectory of autonomous vehicles, as outlined in the study by [58]. This algorithm utilizes environmental data, including camera inputs and route control mechanisms, to evaluate potential hazards along a vehicle’s path. By doing so, it can anticipate and mitigate potential accidents involving autonomous vehicles. The algorithm’s predictions facilitate a decision-making process wherein the vehicle may either persist along its current trajectory or make adjustments to its course. Another cluster of studies delved into strategies for averting accidents through obstacle management. In [59], the approach involved extracting essential parameters by initially encompassing all types of vehicles alongside static and dynamic environmental obstructions while examining their interrelationships. Potential risks are pinpointed through a comprehensive collision prediction model involving vehicles and obstacles, paving the way for subsequent remedial actions. This research introduced an innovative framework emphasizing the proactive anticipation and effective resolution of challenges. The identification of obstacles harnesses the power of camera imagery. However, it is worth noting that the efficacy of the proposed technique is contingent upon the intricate process of recognizing vehicles within the obtained images. Furthermore, integrating route planning and addressing the mobility aspect of vehicles hold the potential to further refine and augment this methodology.
The central theme of [56] revolved around developing a robust strategy for delivering in-vehicle warning information with a foundation in crash-risk prediction. This strategy leveraged vehicle interaction data from a forward collision warning system and vehicle-to-vehicle wireless communication. The core objective of this paper was to furnish anticipatory warning information within the context of preventive traffic safety management (PTSM), thereby enhancing accident prevention efforts. Additionally, the authors delineated three distinct metrics designed to assess the warning information’s dependability and mitigate the potential for accidents.
Sun et al. [60] introduced an innovative “intelligent connected vehicles” paradigm to orchestrate vehicular traffic. This approach entails continuous surveillance of vehicles to prevent collisions and accidents. The comprehensive dataset harnessed for vehicle control and navigation encompasses inputs from vehicle sensors and a network of interconnected devices. Consequently, this article stands out as one of the rare methodologies that accentuate the significance of data amalgamation from network sources and the surrounding environment. To augment the effectiveness of this approach, it becomes imperative to integrate cost and resource management to alleviate the intricacies associated with real-time deployment. Concurrently, several other studies have explored alternative strategies to navigate obstacles and avert accidents.
Wang et al. [61] provided an intricate realm of lane changes within the context of traffic management. This model considers factors such as diversions, proximate vehicles, and the prevailing traffic volume in the surrounding environment. Within this framework, meticulous tracking of the vehicle and its ongoing trajectory takes place. When circumstances necessitate, the model initiates a lane change, dynamically assessing the control prediction model to identify the optimal path. Subsequently, responsive actions are taken to effectuate the required change in direction. This model considers the dynamic shifts in vehicle positions and traffic’s ever-changing flow and intensity. When deliberating upon the optimal route, it remains crucial to account for vehicle connectivity and its associated parameters. Several scholarly works have delved into the traffic management domain, emphasizing fundamental vehicle parameters.
Zhang et al. [62] proposed a lane-changing strategy grounded in a comprehensive assessment of traffic-related factors and prevailing environmental conditions. The focal point of this research was its adaptability to the necessities of real-world scenarios for autonomous vehicles, where immediate responses are imperative. This strategy exhibited flexibility, adjusting based on predefined controls. Typically, rerouting is enacted in response to planned considerations stemming from environmental variables. Path control and planning coordination are executed by regulating inter-vehicle distances and a vehicle’s spatial positioning, further augmented by longitudinal distance measurements relative to obstacles.
Xiao et al. [63] introduced a solution for obstacle management, catering to quality and time parameters while prioritizing safety. This research harnessed Hamiltonian analysis to devise a control system that facilitates cost management and orchestrates optimal route guidance. A distinct facet setting apart the scenarios explored in this article from other studies is formulating a mechanism to govern and suppress noise, further enhancing control efficacy.
An additional consideration within this discourse pertains to the computational costs incurred by the operations. Zhang et al. [64] provided a comprehensive framework governing the motion of autonomous vehicles. This framework comprehensively addresses a spectrum of dynamics, encompassing lane changes, directional shifts, adeptly navigating obstacles and potential road hazards, and regulating vehicle velocity and acceleration. Central to this technique is a component tailored to evaluate the associated risks and safety hazards, informed by the unique attributes of the route and the vehicles involved.
The methodology necessitates further elaboration to specify intricate particulars to avoid collisions with stationary obstructions. In light of the distinctive movement patterns exhibited by vehicles, a suite of solutions is explored to govern vehicle placement within Wang et al. [65], focused on optimizing mobility through temporal control of autonomous vehicles’ positions. The method factors environmental conditions using probability-based equations derived from collision and accident likelihood over different time intervals. This modeling approach is rooted in the overarching system architecture. Supplementing the ambient data, real-time feedback from the vehicle’s current state is assimilated within the perception layer, with updates orchestrated at predefined time intervals. The solution served to enhance the accuracy of decision-making within the framework.
In the report’s context [66], the emphasis is placed on road roughness as a contributing factor to accidents. Parameters grounded in vehicle characteristics and their interaction with road irregularities are delineated. The proposed algorithm addresses the challenge of maintaining proper wheel contact on uneven surfaces, involving a mathematical equation and specified parameters to define vehicular motion on such roads. It is important to note that, while this technique presents a comprehensive framework for handling road roughness, it currently needs to incorporate real-time resource management or systemic status monitoring, requiring further refinement to achieve practical applicability.
On the other hand, Kummetha et al. [67] modeled driver behavior, leveraging vehicle-specific parameters such as acceleration and speed. The temporal aspect is paramount here, as timely response times are pivotal for mitigating accident risks by established criteria. These studies offered valuable insights into enhancing safety and accident prevention in both cases. However, there are distinct areas for refinement and improvement regarding real-time resource management and systemic status tracking, as well as including temporal considerations.
He et al. [54] introduced a comprehensive mathematical model to facilitate the efficient management of lane changes for autonomous vehicles. This model offers a solution that describes the trajectory and motion of a vehicle while undergoing a lane change, accomplished through the establishment of mathematical relationships. A notable aspect of this model is its adaptability to densely populated urban routes, reflecting its versatility across various traffic environments. The delineated scenarios within this framework are broadly classified into two overarching categories: general and emergency. These categories are the foundation for assessing and validating the model’s efficacy. This model demonstrates robust performance and effectiveness by undergoing scrutiny across a spectrum of scenarios, rendering it suitable for diverse situations and providing valuable insights for lane change management in autonomous vehicles. Zhang et al. [68] presented a comprehensive analysis encompassing vehicle safety, and considered the energy and cost constraints associated with vehicles. A two-stage framework was meticulously designed, catering to security and energy efficiency. This framework addresses single-objective decision-making challenges that arise in such contexts.
Higher engine efficiency is typically associated with increased energy consumption. Regarding the mentioned article [69], deep learning and neural networks are employed for validation, ensuring the effectiveness of broadly established safety techniques. This methodology notably centers on video data, leveraging the quality and reliability of this data to devise solutions pertinent to autonomous driving. The assessment of autonomous driving status hinges on input data gathered from traffic cameras. The study underscores the multifaceted nature of traffic management solutions, revealing various perspectives.
The subsequent segment involves a comparative analysis presented in Table 11, which systematically evaluates and categorizes these solutions, providing a taxonomy for reference. The prevalence of articles within this category signifies its prominence. These articles adopt a comprehensive approach, considering both the environmental factors and the internal software components of autonomous vehicles. Consequently, reviewing diverse methods highlights a consistent consideration of resource management and real-time responsiveness. These aspects are recurrently mentioned in the context of advantages and disadvantages across numerous papers.
5.2. Result Analysis
This section analyzes the existing safety management research regarding autonomous vehicles. The analytical reports are based on our questions.
Q3: What is the impact of AI methods on safety management in autonomous vehicles?
Accountability means being able to check and manage the risks of autonomous vehicles. There should be clear rules and responsibilities for who is in charge of autonomous vehicles and their results before and after they are made, used, and sold. Autonomous vehicles are essential for safety, and AI methods can help manage risk and failure [70]. Figure 8 shows a statistical comparison of the AI methods and algorithms used in safety management in autonomous vehicles. Over 63% of articles in different categories have used artificial intelligence techniques and algorithms. This issue shows that the application of artificial intelligence in safety management is extensive, and it is used in different categories of autonomous vehicles’ software systems, including traffic and route management, architectural design, fault prevention, and accident management.
Figure 9 provides an assessment of current AI practices in the field of safety management in autonomous vehicles. Deep learning had the highest usage in assessing safety management in the selected papers. Using different artificial intelligence techniques in designing software systems for autonomous vehicles is such that some of the proposed creative methods have fully benefited from artificial intelligence-based methods. Deep learning methods like perception, planning, control, and decision-making are widely used in autonomous driving systems. However, deep learning methods also face many challenges in ensuring the reliability and safety of autonomous vehicles, such as data quality, model robustness, generalization ability, verification and validation, and security issues. Therefore, researchers have proposed various techniques to improve the reliability and safety of deep learning methods for autonomous driving systems, such as data augmentation, adversarial training, uncertainty estimation, model testing and verification, anomaly detection, and human supervision. Machine learning methods can help improve autonomous vehicles’ performance, safety, and robustness. However, machine learning methods also pose challenges and limitations for autonomous vehicles, such as data dependency, model complexity, interpretability, and security. Therefore, researchers have explored various ways to address these issues and enhance autonomous vehicles’ reliability and machine learning methods. For this reason, in many forms, a combination of different solutions has been used to increase reliability at the system and data level so that safety management is carried out correctly and does not result in life and financial losses.
Q4: Which metrics are used to evaluate design approaches in autonomous vehicles?
The extracted Figure provides an overview of diverse parameters outlined in mathematical models and objective functions across various papers. These parameters have been strategically defined to address the challenges associated with managing the safety of autonomous vehicles. In a straightforward context, vehicle safety involves the control of conditions to preclude errors, malfunctions, or accidents. Thus, those related to error detection and the efficacy of accident prediction through pattern recognition are paramount among the parameters.
Additionally, the system’s fundamental-performance metrics and response-time parameters hold significant importance, especially concerning the intricacies of the proposed solutions. A delicate balance might need to be struck between these two categories of parameters in certain instances. As such, most reviewed papers have been appraised based on these criteria. The presented Figure, specifically Figure 10, visually represents the parameters against which different methodologies were evaluated. The noteworthy factors of performance and the depreciation of crashes emerge as pivotal considerations within the realm of safety management. This visual representation is an illustrative guide to the core evaluation criteria employed across these studies.
Q5: What are the most common tools and simulators in autonomous vehicles from a software point of view?
Various approaches have been employed to ascertain critical safety parameters. According to Figure 11, 16% of the analyzed papers have opted for implementation through the MATLAB platform. Additionally, 13% of the examined documents utilized the Simulink tool to evaluate and dissect existing case studies. However, it is noteworthy that some authors have not explicitly mentioned the tool employed to assess their methods. These statistics underscore the diversity of tools used to evaluate and validate safety-related methodologies. MATLAB and Simulink emerge as the prominent choices, reflecting their popularity and effectiveness in handling complex modeling, simulation, and analysis tasks within the context of autonomous vehicle safety management research.
Q6: What are the open issues, challenges, and opportunities in the design of autonomous vehicle safety?
Designing software for autonomous vehicles entails several inherent risks that significantly impact safety considerations. Some of these risks include the following:
- Existence of Blind Spots for Sensors: Just as human drivers encounter blind spots in their field of view, autonomous vehicles can also experience limitations in their sensor coverage. These blind spots can lead to vehicle sensors failing to detect specific objects, obstacles, or events. This challenge becomes particularly crucial when swift reactions are required to respond to sudden environmental changes. The management of blind spots is a critical challenge in the design of autonomous vehicle software, necessitating robust solutions to handle unexpected situations effectively.
- Mixed Traffic Environment: Autonomous vehicles are designed to reduce accidents due to human error. However, real-world traffic environments are often hybrid, comprising a diverse array of vehicles, including conventional and autonomous ones and motorized and non-motorized forms of transportation. This heterogeneity challenges modeling these vehicles’ behavior, movement, speed, and acceleration, which may adhere to a different pattern. The complexity of detecting and reacting to faults within this diverse network of vehicles is heightened. Additionally, accurately predicting and making decisions regarding the movements of self-driving vehicles amidst such diversity is inherently challenging. Ensuring effective fault detection, forecasting, and decision-making mechanisms in such mixed traffic environments is an ongoing concern.
- Driver interaction: In mixed traffic conditions, safety control is difficult due to the unpredictability of drivers [11]. Therefore, it is necessary to add parameters such as the reaction time of drivers, the possibility of a delay in the drivers’ reaction, and other parameters to determine a way for their cooperation, taking into account any uncertain maneuvers of the drivers [71]. There is a difference between how people drive and how the AV drives, making people think the AV is unsafe. Even though the AV hardly ever crashes, people still often take over the driving from the AV. Also, even though the numbers show that the AV drives in risky situations, it rarely hits anything; this view means that the usual way of measuring safety, such as how much time there is before a collision, may not work well for traffic with AVs [72].
- The challenges above have been acknowledged in research, such as [60,73]. While specific parameters have been addressed in some methodologies, the domain of mixed traffic environments, blind spots, and the intricacies of real-world data integration for evaluation remain areas that require further exploration and development. As the technology and understanding of autonomous vehicles evolve, these challenges will likely persist and necessitate ongoing research and refinement. Due to the necessity of making decisions rooted in environmental circumstances and identifying diverse environmental factors, challenges may emerge in both implementation and decision-making processes. The ensuing challenges can encompass the following aspects:
- Complexity: The complexity of the necessary algorithms presents a significant challenge. As vehicle automation levels increase, the algorithms employed to detect, predict, and make rapid decisions in response to many requests to prevent accidents become more intricate. This poses a considerable obstacle within systems [74].
- Power Gap: Given the intricacy of algorithms, the demand for instantaneous responsiveness, the dynamic nature of environmental components, their various trajectories, and heterogeneous networks, achieving peak performance is imperative for implementing algorithms, methodologies, solutions, and frameworks. This requirement for high performance becomes particularly pronounced in elevated automation levels [75]. The power demand is considerable, encompassing operational, temporal, and processing power. However, given the existing hardware and software infrastructure, meeting these energy requirements poses a noteworthy challenge in this domain [73,76].
- Traffic Volume: Traffic volume constitutes a significant hurdle in managing autonomous vehicles. Given the current context, maintaining vehicle safety hinges on the speed of autonomous cars. Conversely, self-driving vehicles are constrained by lower speed limits to mitigate heightened risks, and regulate speed through various means [68,76]. When evaluating procedures, the traffic volume must be taken into account. Given the opacity of scenarios and the scarcity of environments with a substantial percentage of autonomous vehicles, effectively addressing unforeseen circumstances and enhancing safety becomes challenging [71,77].
It is necessary to act comprehensively to cover some challenges. For example, when presenting a solution for mixed traffic management, it is required to consider the drivers’ reactions. On the other hand, as was previously said in the answers to the questions, the reliability of the data is also essential [78]. Therefore, it is necessary to examine some challenges side by side in future works and identify compromise points.
6. Discussion and Limitation
The present study first presented a taxonomy of safety management in self-driving vehicles, which can be used in further developments in this area. We considered safety management methods and processes from the point of view of software design. We categorized the solutions and strategies into four general categories—architectural design, parametric model, traffic control, and fault management—and we reviewed each category based on its methods, techniques, parameters, and tools.
This study has some limitations that affect the interpretation of the results. We did not include any studies that were not in English or were only available as early-access papers or posters, books, and whitepapers. We also used a specific query syntax and a limited number of databases to search for relevant studies. These limitations might have caused us to miss essential studies, even though we used many keywords and operators in our query. We can extend the selected papers and research for future work. This study only focused on the software and system requirements and the implementation of safety management in autonomous vehicles, and did not explore other aspects of this.
7. Conclusions and Future Directions
The primary objective of autonomous cars is to mitigate accidents and human errors, thus enhancing road safety. However, several unresolved challenges persist in developing autonomous vehicles (AVs). The software and system requisites are among the aspects that demand consideration in vehicle creation. While these aspects hold minimal significance in traditional vehicles, self-driving cars can potentially trigger damage, accidents, and diminished safety. Numerous challenges have arisen in this realm, primarily stemming from the intricacies of system design and the critical demands of data collection at the network level, which subsequently inform decision-making processes.
This article delves into an exploration of self-driving vehicles. It initially approaches the subject from a software perspective, scrutinizing strategies that enhance safety and assurance. These strategies encompass design, system, and network prerequisites. Furthermore, the article categorizes and contrasts various influential parameters that shape these strategies. The findings indicate that the parameters were introduced across multiple dimensions. Numerous parameters were addressed within discussions concerning the overarching design of systems, networks, infrastructure, data collection, and transmission. These parameters are encapsulated within solutions tied to architectural design and mathematical models. Another cluster of parameters focused on system-level traffic management. This group proposed strategies to enhance safety within the system’s framework, particularly in the event of road accidents. These strategies encompass diverse approaches for managing vehicular and pedestrian movement.
Additionally, a separate category aimed at averting errors within software systems emerged. These strategies pertain to software design, aiming to elevate fault tolerance at the system level. Considering that another challenge of the structure of autonomous vehicles is their operation in the real environment, all the selected articles were reviewed regarding their simulation conditions, measurement criteria, and related tools, and their statistical information was been presented at the end. Various challenges that may lead to problems in ensuring the safety of self-driving vehicles were categorized so that they can be addressed more carefully in the design methods. Researchers can use this research to develop a new approach for improving sensor and application safety. There is a fine line between safety and security in many methods and solutions. It is suggested to investigate safety and its relationship with other quality parameters, such as reliability and security, for future research. Considering that one of the categories also deals with fault-tolerant solutions and methods, it is necessary to examine the evaluation criteria in more detail and define error-free scenarios.
Author Contributions
S.A.: Preparation, Writing—Original draft, Methodology, Visualization, and Investigation; A.M.R.: Conceptualization, Reviewing and Editing, Validation, and Supervision. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Acknowledgments
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liu, S.; Tang, J.; Zhang, Z.; Gaudiot, J.L. Caad: Computer architecture for autonomous driving. arXiv 2017, arXiv:1702.01894. [Google Scholar]
- Rosique, F.; Navarro, P.J.; Fernández, C.; Padilla, A. A Systematic Review of Perception System and Simulators for Autonomous Vehicles Research. Sensors 2019, 19, 648. [Google Scholar] [CrossRef] [PubMed]
- Rajabli, N.; Flammini, F.; Nardone, R.; Vittorini, V. Software verification and validation of safe autonomous cars: A systematic literature review. IEEE Access 2020, 9, 4797–4819. [Google Scholar] [CrossRef]
- Bila, C.; Sivrikaya, F.; Khan, M.A.; Albayrak, S. Vehicles of the future: A survey of research on safety issues. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1046–1065. [Google Scholar] [CrossRef]
- Rasouli, A.; Tsotsos, J.K. Autonomous vehicles that interact with pedestrians: A survey of theory and practice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 900–918. [Google Scholar] [CrossRef]
- Aradi, S. Survey of Deep Reinforcement Learning for Motion Planning of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 23, 740–759. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, Z.; Yang, H.; Yang, L. Artificial intelligence applications in the development of autonomous vehicles: A survey. IEEE/CAA J. Autom. Sin. 2020, 7, 315–329. [Google Scholar] [CrossRef]
- Omeiza, D.; Webb, H.; Jirotka, M.; Kunze, L. Explanations in autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10142–10162. [Google Scholar] [CrossRef]
- Kaur, P.; Taghavi, S.; Tian, Z.; Shi, W. A survey on simulators for testing self-driving cars. In Proceedings of the 2021 Fourth International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, 28–29 April 2021; pp. 62–70. [Google Scholar]
- Sharma, O.; Sahoo, N.C.; Puhan, N.B. Recent advances in motion and behavior planning techniques for software architecture of autonomous vehicles: A state-of-the-art survey. Eng. Appl. Artif. Intell. 2021, 101, 104211. [Google Scholar] [CrossRef]
- Akowuah, F.; Kong, F. Physical invariant based attack detection for autonomous vehicles: Survey, vision, and challenges. In Proceedings of the 2021 Fourth International Conference on Connected and Autonomous Driving (MetroCAD), Detroit, MI, USA, 28–29 April 2021; pp. 31–40. [Google Scholar]
- Kim, K.; Kim, J.S.; Jeong, S.; Park, J.H.; Kim, H.K. Cybersecurity for autonomous vehicles: Review of attacks and defense. Comput. Secur. 2021, 103, 102150. [Google Scholar] [CrossRef]
- Qin, Y.; Hashemi, E.; Khajepour, A. Integrated crash avoidance and mitigation algorithm for autonomous vehicles. IEEE Trans. Ind. Inform. 2021, 17, 7246–7255. [Google Scholar] [CrossRef]
- Pham, M.; Xiong, K. A survey on security attacks and defense techniques for connected and autonomous vehicles. Comput. Secur. 2021, 109, 102269. [Google Scholar] [CrossRef]
- Shahrdar, S.; Menezes, L.; Nojoumian, M. A survey on trust in autonomous systems. In Science and Information Conference; Springer: Cham, Switzerland, 2018; pp. 368–386. [Google Scholar]
- Di Camillo, S.; Ghribi, A. Developing Safe Software for Autonomous Systems; No. 2022-01-0108, SAE Technical Paper; SAE: Warrendale, PA, USA, 2022. [Google Scholar]
- Palin, R.; Ward, D.; Habli, I.; Rivett, R. ISO 26262 Safety Cases: Compliance and Assurance. 2011. Available online: https://digital-library.theiet.org/content/conferences/10.1049/cp.2011.0251 (accessed on 1 October 2023).
- Campbell, S.; O’Mahony, N.; Krpalcova, L.; Riordan, D.; Walsh, J.; Murphy, A.; Ryan, C. Sensor technology in autonomous vehicles: A review. In Proceedings of the 2018 29th Irish Signals and Systems Conference (ISSC), Belfast, UK, 21–22 June 2018; pp. 1–4. [Google Scholar]
- Li, S.; Frey, M.; Gauterin, F. Model-Based Condition Monitoring of the Sensors and Actuators of an Electric and Automated Vehicle. Sensors 2023, 23, 887. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef] [PubMed]
- Hommes, Q.V.E. Assessment of the ISO 26262 standard, road vehicles—Functional safety. In Proceedings of the SAE 2012 Government/Industry Meeting, Washington, DC, USA, 25–27 January 2012; Volume 25. [Google Scholar]
- Adam, S.; Gerhard, G. Development of the ISO 21448. In Systems, Software and Services Process Improvement: 26th European Conference, EuroSPI 2019, Edinburgh, UK, September 18–20, 2019, Proceedings 26; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 585–593. [Google Scholar]
- Georg, M.; Christoph, S.; Omar, V.; Eugen, B. ISO/SAE DIS 21434 automotive cybersecurity standard-in a nutshell. In Computer Safety, Reliability, and Security. SAFECOMP 2020 Workshops: DECSoS 2020, DepDevOps 2020, USDAI 2020, and WAISE 2020, Lisbon, Portugal, September 15, 2020, Proceedings 39; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 123–135. [Google Scholar]
- Bell, R. Introduction to IEC 61508. In Acm International Conference Proceeding Series; 2006; Volume 162, pp. 3–12. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=1fa95e2147da7d27cc9a25166d43c9ad6e17ac2e (accessed on 1 October 2023).
- Teoh, E.R.; Kidd, D.G. Rage against the machine? Google’s self-driving cars versus human drivers. J. Saf. Res. 2017, 63, 57–60. [Google Scholar] [CrossRef]
- Oikonomou, M.G.; Orfanou, F.P.; Vlahogianni, E.I.; Yannis, G. Impacts of autonomous shuttle services on traffic, safety, and environment for future mobility scenarios. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]
- Bogdoll, D.; Orf, S.; Töttel, L.; Zöllner, J.M. Taxonomy and Survey on Remote Human Input Systems for Driving Automation Systems. In Future of Information and Communication Conference; Springer: Cham, Switzerland, 2022; pp. 94–108. [Google Scholar]
- Acharya, S.; Mekker, M. Importance of the reputation of data manager in the acceptance of connected vehicles. Commun. Transp. Res. 2022, 2, 100053. [Google Scholar] [CrossRef]
- Sini, J.; Violante, M. A simulation-based methodology for aiding advanced driver assistance systems hazard analysis and risk assessment. Microelectron. Reliab. 2020, 109, 113661. [Google Scholar] [CrossRef]
- Yang, Z.; Bao, Y.; Yang, Y.; Huang, Z.; Bodeveix, J.P.; Filali, M.; Gu, Z. Exploiting augmented intelligence in the modeling of safety-critical autonomous systems. Form. Asp. Comput. 2021, 33, 343–384. [Google Scholar] [CrossRef]
- Li, G.; Yang, Y.; Li, S.; Qu, X.; Lyu, N.; Li, S.E. Decision making of autonomous vehicles in lane change scenarios: Deep reinforcement learning approaches with risk awareness. Transp. Res. Part C Emerg. Technol. 2022, 134, 103452. [Google Scholar] [CrossRef]
- Khan, S.K.; Shiwakoti, N.; Stasinopoulos, P. A conceptual system dynamics model for cybersecurity assessment of connected and autonomous vehicles. Accid. Anal. Prev. 2021, 165, 106515. [Google Scholar] [CrossRef]
- Dimitrakopoulos, G.; Kavakli, E.; Loucopoulos, P.; Anagnostopoulos, D.; Zographos, T. A capability-oriented modelling and simulation approach for autonomous vehicle management. Simul. Model. Pract. Theory 2019, 91, 28–47. [Google Scholar] [CrossRef]
- Ansari, S.; Ahmad, J.; Aziz Shah, S.; Kashif Bashir, A.; Boutaleb, T.; Sinanovic, S. Chaos-based privacy preserving vehicle safety protocol for 5G Connected Autonomous Vehicle networks. Trans. Emerg. Telecommun. Technol. 2020, 31, e3966. [Google Scholar] [CrossRef]
- Yu, K.; Lin, L.; Alazab, M.; Tan, L.; Gu, B. Deep learning-based traffic safety solution for a mixture of autonomous and manual vehicles in a 5G-enabled intelligent transportation system. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4337–4347. [Google Scholar] [CrossRef]
- Passerone, R.; Cancila, D.; Albano, M.; Mouelhi, S.; Plosz, S.; Jantunen, E.; Ryabokon, A.; Laarouchi, E.; Hegedus, C.; Varga, P. A methodology for the design of safety-compliant and secure communication of autonomous vehicles. IEEE Access 2019, 7, 125022–125037. [Google Scholar] [CrossRef]
- Wan, L.; Sun, Y.; Sun, L.; Ning, Z.; Rodrigues, J.J. Deep learning based autonomous vehicle super resolution DOA estimation for safety driving. IEEE Trans. Intell. Transp. Syst. 2020, 22, 4301–4315. [Google Scholar] [CrossRef]
- Boddupalli, S.; Rao, A.S.; Ray, S. Resilient Cooperative Adaptive Cruise Control for Autonomous Vehicles Using Machine Learning. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15655–15672. [Google Scholar] [CrossRef]
- Wang, Y.; Zong, C.; Guo, H.; Chen, H. Fault-tolerant path-following control for in-wheel-motor-driven autonomous ground vehicles with differential steering. Asian J. Control 2020, 22, 1230–1240. [Google Scholar] [CrossRef]
- Biddle, L.; Fallah, S. A Novel Fault Detection, Identification and Prediction Approach for Autonomous Vehicle Controllers Using SVM. Automot. Innov. 2021, 4, 301–314. [Google Scholar] [CrossRef]
- Brinkschulte, U.; Pacher, M.; Brinkschulte, M. Improving the fail-operational behavior of automotive applications by artificial DNA. Concurr. Comput. Pract. Exp. 2021, 33, e5608. [Google Scholar] [CrossRef]
- Pan, H.; Sun, W.; Sun, Q.; Gao, H. Deep learning based data fusion for sensor fault diagnosis and tolerance in autonomous vehicles. Chin. J. Mech. Eng. 2021, 34, 72. [Google Scholar] [CrossRef]
- Parseh, M.; Asplund, F. New needs to consider during accident analysis: Implications of autonomous vehicles with collision reconfiguration systems. Accid. Anal. Prev. 2022, 173, 106704. [Google Scholar] [CrossRef] [PubMed]
- Oh, K.; Park, S.; Lee, J.; Yi, K. Functional perspective-based probabilistic fault detection and diagnostic algorithm for autonomous vehicle using longitudinal kinematic model. Microsyst. Technol. 2018, 24, 4527–4537. [Google Scholar] [CrossRef]
- Zhu, J.; Ma, Y.; Lou, Y. Multi-vehicle interaction safety of connected automated vehicles in merging area: A real-time risk assessment approach. Accid. Anal. Prev. 2022, 166, 106546. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Oh, K.; Jeong, Y.; Yi, K. Model predictive control-based fault detection and reconstruction algorithm for longitudinal control of autonomous driving vehicle using multi-sliding mode observer. Microsyst. Technol. 2020, 26, 239–264. [Google Scholar] [CrossRef]
- Pek, C.; Althoff, M. Fail-safe motion planning for online verification of autonomous vehicles using convex optimization. IEEE Trans. Robot. 2020, 37, 798–814. [Google Scholar] [CrossRef]
- Cui, J.; Sabaliauskaite, G.; Liew, L.S.; Zhou, F.; Zhang, B. Collaborative analysis framework of safety and security for autonomous vehicles. IEEE Access 2019, 7, 148672–148683. [Google Scholar] [CrossRef]
- Zhu, J.; Easa, S.; Gao, K. Merging control strategies of connected and autonomous vehicles at freeway on-ramps: A comprehensive review. J. Intell. Connect. Veh. 2022, 5, 99–111. [Google Scholar] [CrossRef]
- Jiang, R.; Liu, Z.; Li, H. Evolution towards optimal driving strategies for large-scale autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 1018–1027. [Google Scholar] [CrossRef]
- Evans, K.; de Moura, N.; Chauvier, S.; Chatila, R.; Dogan, E. Ethical decision making in autonomous vehicles: The AV ethics project. Sci. Eng. Ethics 2020, 26, 3285–3312. [Google Scholar] [CrossRef]
- Papadoulis, A.; Quddus, M.; Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways. Accid. Anal. Prev. 2019, 124, 12–22. [Google Scholar] [CrossRef]
- Jo, Y.; Jang, J.; Ko, J.; Oh, C. An In-Vehicle Warning Information Provision Strategy for V2V-Based Proactive Traffic Safety Management. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19387–19398. [Google Scholar] [CrossRef]
- He, Y.; Feng, J.; Wei, K.; Cao, J.; Chen, S.; Wan, Y. Modeling and simulation of lane-changing and collision avoiding autonomous vehicles on superhighways. Phys. A Stat. Mech. its Appl. 2023, 609, 128328. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Pu, Z.; Hu, J.; Wang, X.; Ke, R. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving. Transp. Res. Part C Emerg. Technol. 2020, 117, 102662. [Google Scholar] [CrossRef]
- Zhu, Z.; Hu, Z.; Dai, W.; Chen, H.; Lv, Z. Deep learning for autonomous vehicle and pedestrian interaction safety. Saf. Sci. 2022, 145, 105479. [Google Scholar] [CrossRef]
- Kosari, A.; Popov, P.; Roy, R. Modelling Safety of Connected and Autonomous Vehicles (CAVs) under Cyber-Attacks on Perception and Safety Monitors. In Proceedings of the 2022 12th International Conference on Dependable Systems, Services and Technologies (DESSERT), Athens, Greece, 9–11 December 2022; pp. 1–7. [Google Scholar]
- Xu, S.; Peng, H.; Lu, P.; Zhu, M.; Tang, Y. Design and experiments of safeguard protected preview lane keeping control for autonomous vehicles. IEEE Access 2020, 8, 29944–29953. [Google Scholar] [CrossRef]
- Malawade, A.V.; Yu, S.Y.; Hsu, B.; Muthirayan, D.; Khargonekar, P.P.; Al Faruque, M.A. Spatiotemporal Scene-Graph Embedding for Autonomous Vehicle Collision Prediction. IEEE Internet Things J. 2022, 9, 9379–9388. [Google Scholar] [CrossRef]
- Sun, C.; Zheng, S.; Ma, Y.; Chu, D.; Yang, J.; Zhou, Y.; Li, Y.; Xu, T. An active safety control method of collision avoidance for intelligent connected vehicle based on driving risk perception. J. Intell. Manuf. 2021, 32, 1249–1269. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, X.; Xu, Z.; Li, X.; Qu, X. Modeling and field experiments on autonomous vehicle lane changing with surrounding human-driven vehicles. Comput.-Aided Civ. Infrastruct. Eng. 2021, 36, 877–889. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, J.; Liu, Y.; Guo, K.; Ding, H. Planning flexible and smooth paths for lane-changing maneuvers of autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 200–212. [Google Scholar] [CrossRef]
- Xiao, W.; Cassandras, C.G.; Belta, C.A. Bridging the gap between optimal trajectory planning and safety-critical control with applications to autonomous vehicles. Automatica 2021, 129, 109592. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Li, Y.; Zeng, P.; Liang, Y. Structured road-oriented motion planning and tracking framework for active collision avoidance of autonomous vehicles. Sci. China Technol. Sci. 2021, 64, 2427–2440. [Google Scholar] [CrossRef]
- Wang, J.; Huang, Z.; Huang, X.; Wang, T.; Shen, G.; Xie, J. An accident prediction architecture based on spatio-clock stochastic and hybrid model for autonomous driving safety. Concurr. Comput. Pract. Exp. 2021, 35, e6550. [Google Scholar] [CrossRef]
- Jiang, J.; Seaid, M.; Mohamed, M.S.; Li, H. Inverse algorithm for real-time road roughness estimation for autonomous vehicles. Arch. Appl. Mech. 2020, 90, 1333–1348. [Google Scholar] [CrossRef]
- Kummetha, V.C.; Kondyli, A.; Devos, H. Evaluating driver comprehension of the roadway environment to retain accountability of safety during driving automation. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 457–471. [Google Scholar] [CrossRef]
- Zhang, Y.; You, T.; Chen, J.; Du, C.; Ai, Z.; Qu, X. Safe and Energy-Saving Vehicle-Following Driving Decision-Making Framework of Autonomous Vehicles. IEEE Trans. Ind. Electron. 2021, 69, 13859–13871. [Google Scholar] [CrossRef]
- Wu, H.; Lv, D.; Cui, T.; Hou, G.; Watanabe, M.; Kong, W. SDLV: Verification of steering angle safety for self-driving cars. Form. Asp. Comput. 2021, 33, 325–341. [Google Scholar] [CrossRef]
- Fernandez-Llorca, D.; Gomez, E. Trustworthy Artificial Intelligence Requirements in the Autonomous Driving Domain. Computer 2023, 56, 29–39. [Google Scholar] [CrossRef]
- Jung, S.; Seyedi, M.; Rashid, M.M. Safety Assessment of the Interaction Between the Autonomous Shuttle Bus and Vulnerable Road Users; No. Transit IDEA Project 98; Transportation Research Board: Washington, DC, USA, 2022. [Google Scholar]
- Xu, Z.; Fang, Y.; Zheng, N.; Vu, H.L. Analyzing the inconsistency in driving patterns between manual and autonomous modes under complex driving scenarios with a VR-enabled simulation platform. J. Intell. Connect. Veh. 2022, 5, 215–234. [Google Scholar] [CrossRef]
- Khattak, Z.H.; Fontaine, M.D.; Smith, B.L. Exploratory investigation of disengagements and crashes in autonomous vehicles under mixed traffic: An endogenous switching regime framework. IEEE Trans. Intell. Transp. Syst. 2020, 22, 7485–7495. [Google Scholar] [CrossRef]
- National Academies of Sciences, Engineering, and Medicine. Low-Speed Automated Vehicles (LSAVs) in Public Transportation; National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2021. [Google Scholar]
- National Academies of Sciences, Engineering, and Medicine. Business Models to Facilitate Deployment of Connected Vehicle Infrastructure to Support Automated Vehicle Operations; National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2020. [Google Scholar]
- Mattas, K.; Makridis, M.; Hallac, P.; Raposo, M.A.; Thiel, C.; Toledo, T.; Ciuffo, B. Simulating deployment of connectivity and automation on the Antwerp ring road. IET Intell. Transp. Syst. 2018, 12, 1036–1044. [Google Scholar] [CrossRef]
- Biswal, A.K.; Singh, D.; Tripathy, A.K.; Pattanayak, B.K. Smart Autonomous Collision Avoidance and Obstacle Detection Using Internet of Things (IoT) and Controller Area Network (CAN) Protocol. In Advances in Distributed Computing and Machine Learning; Springer: Singapore, 2022; pp. 54–65. [Google Scholar]
- Bathla, G.; Bhadane, K.; Singh, R.K.; Kumar, R.; Aluvalu, R.; Krishnamurthi, R.; Kumar, A.; Thakur, R.N.; Basheer, S. Autonomous vehicles and intelligent automation: Applications, challenges, and opportunities. Mob. Inf. Syst. 2022, 2022, 7632892. [Google Scholar] [CrossRef]
Figure 1.
Tasks in autonomous vehicles.

Figure 2.
PRISMA flowchart.

Figure 3.
Papers per database and year.

Figure 4.
The proposed component-based safety architecture from a software point of view.

Figure 5.
Proposed taxonomy of safety management in AV.

Figure 6.
Methods classification for safety management.

Figure 7.
Architecture-based methods for safety management.

Figure 8.
AI methods’ usage in safety management.

Figure 9.
AI techniques for safety management in AV.

Figure 10.
Evaluation parameters for safety management.

Figure 11.
Safety management simulation tools.


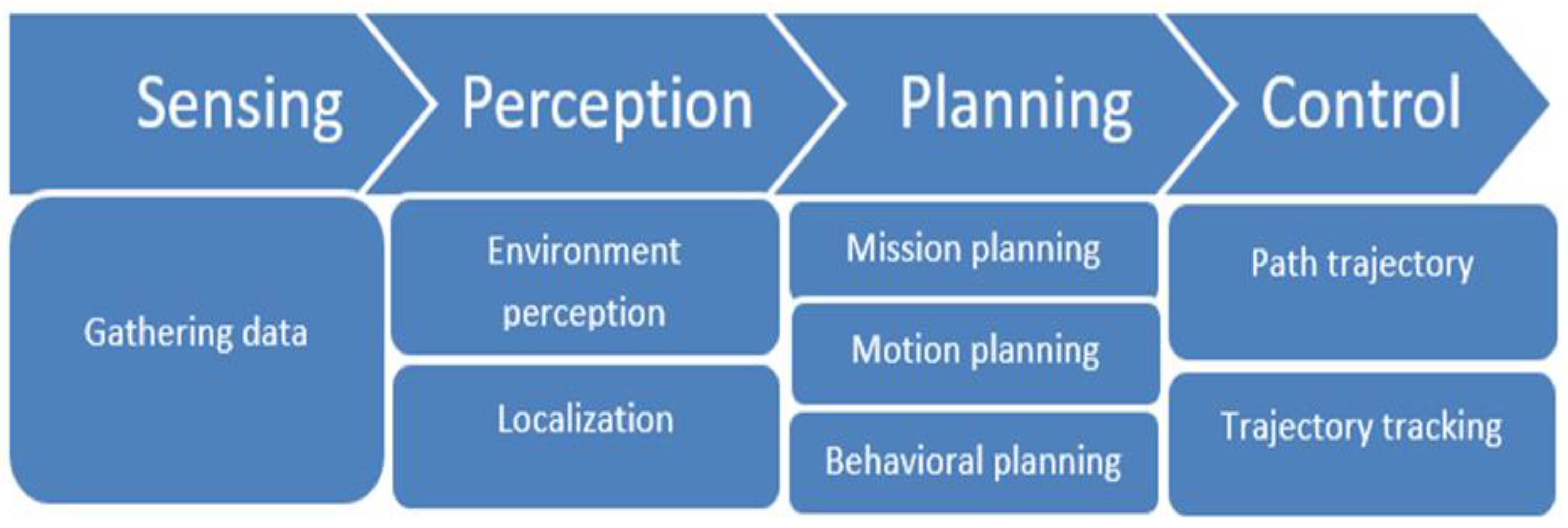{kind=link}
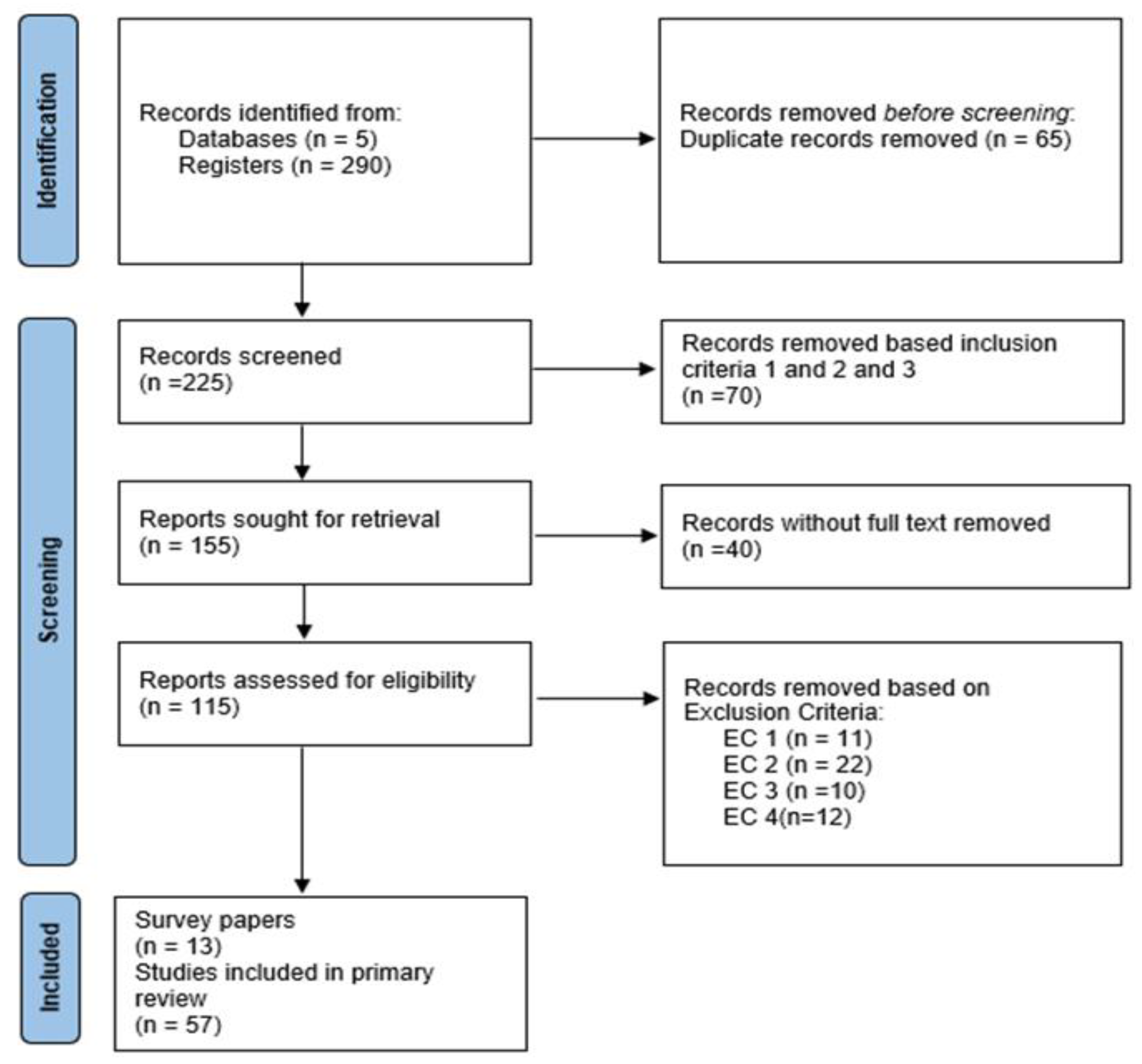{kind=link}
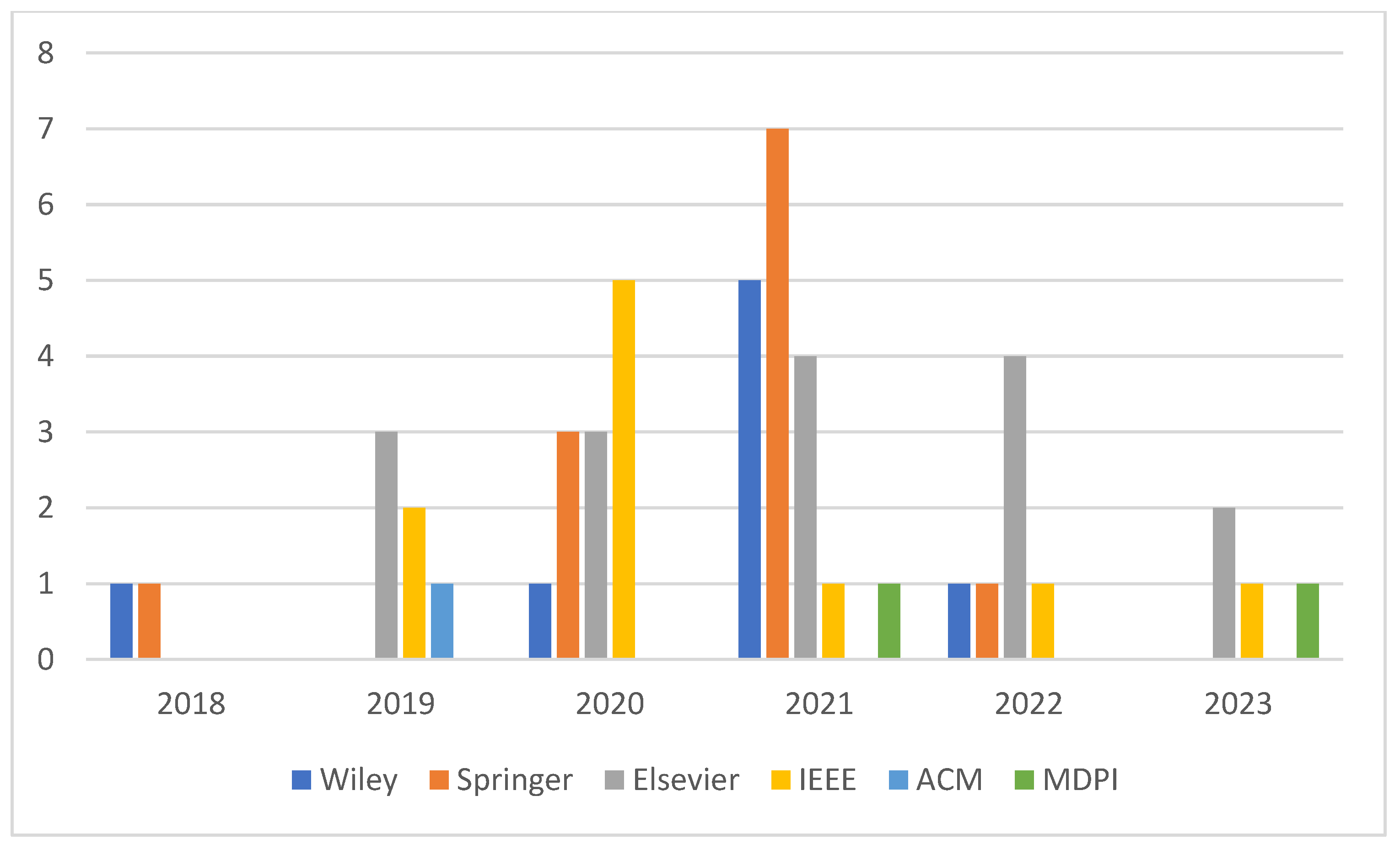{kind=link}
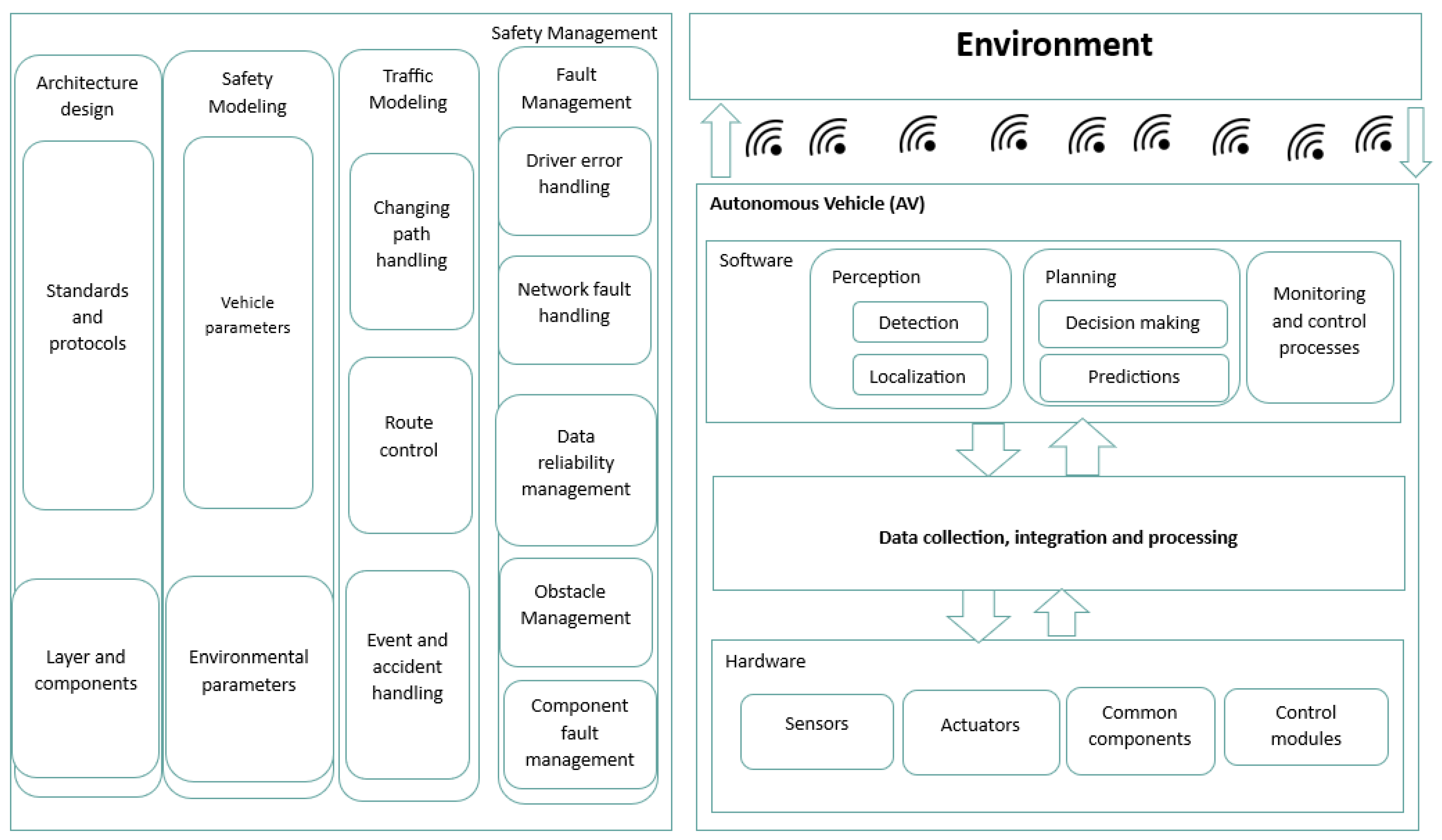{kind=link}
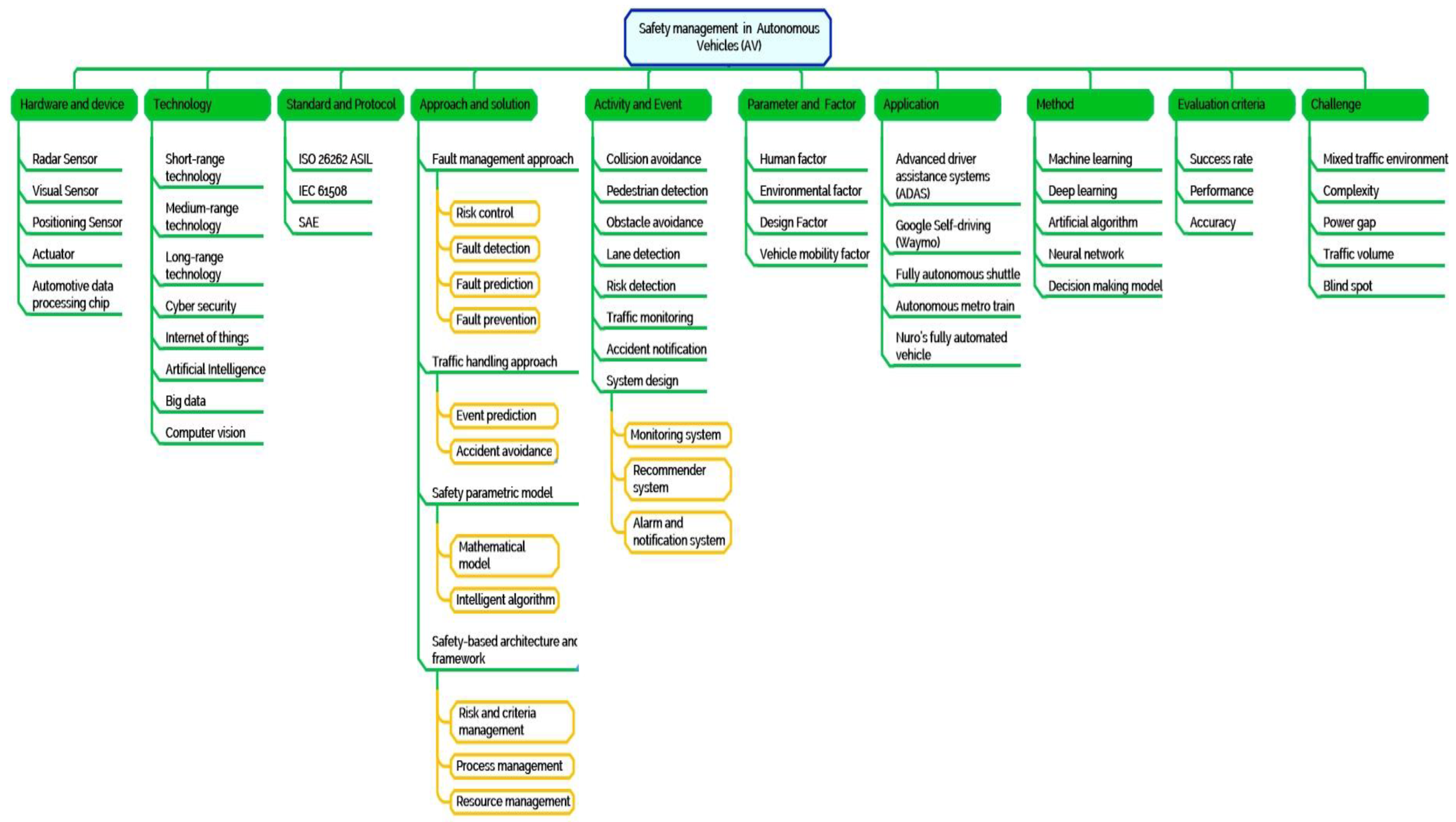{kind=link}
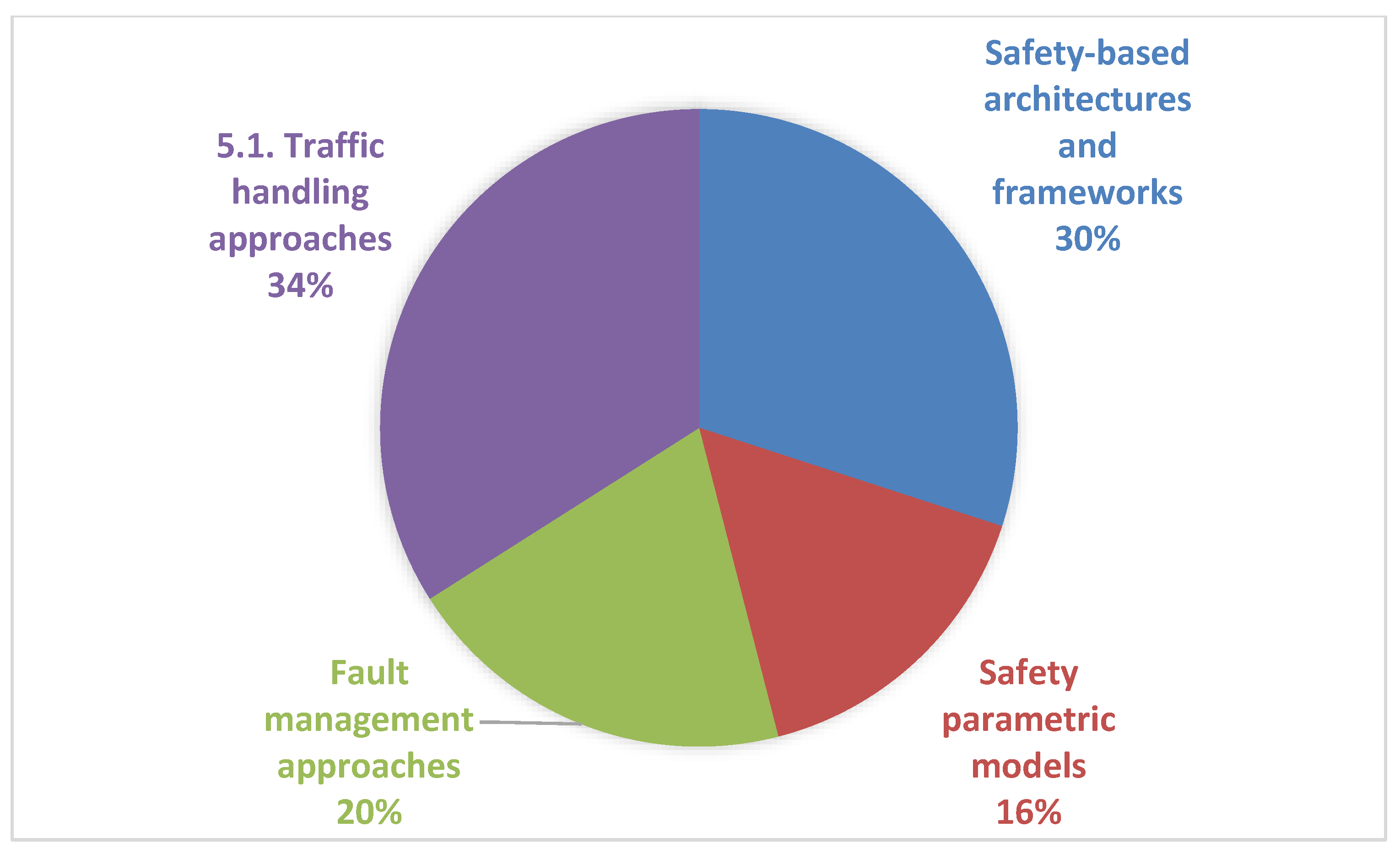{kind=link}
{kind=link}
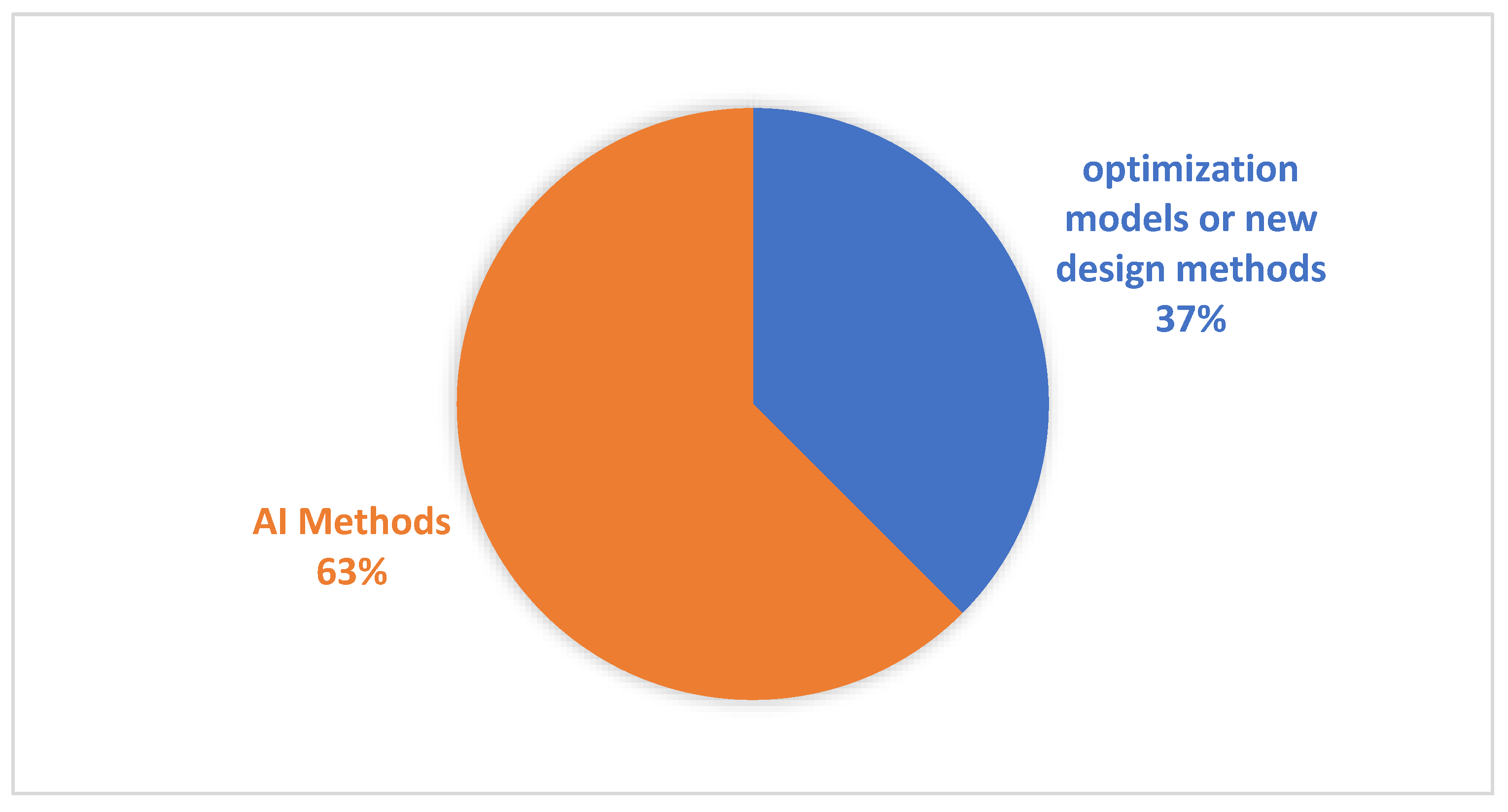{kind=link}
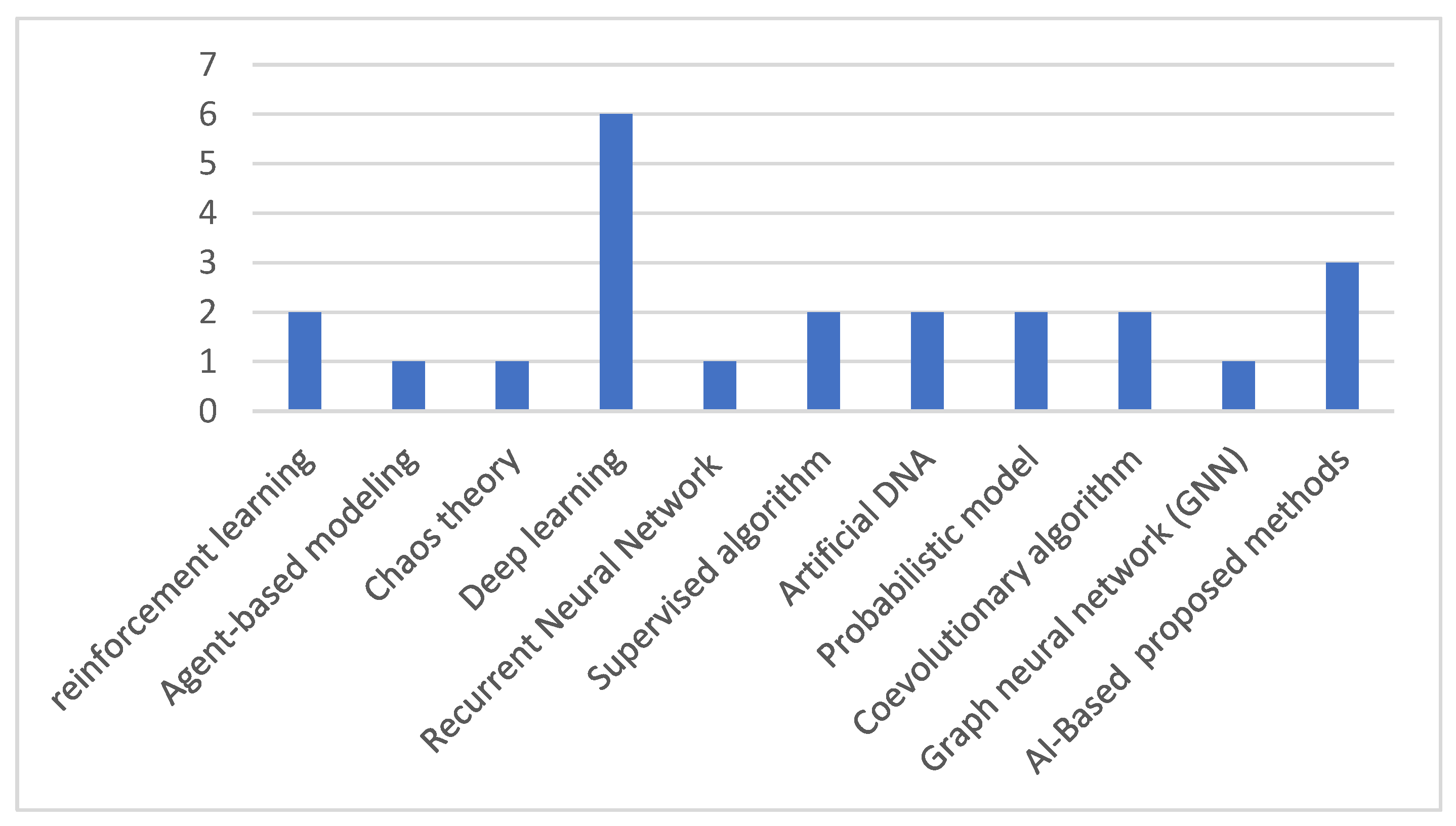{kind=link}
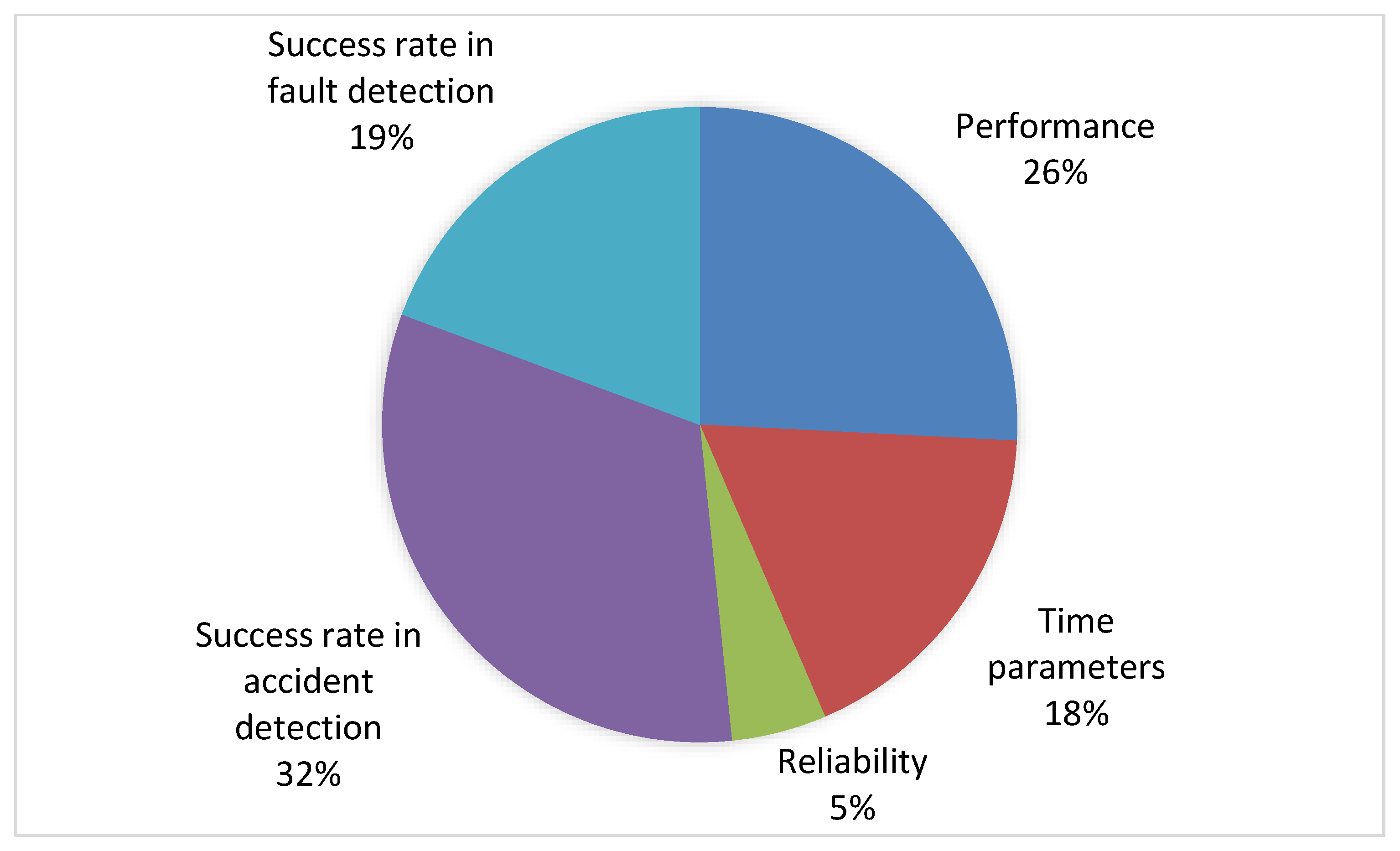{kind=link}
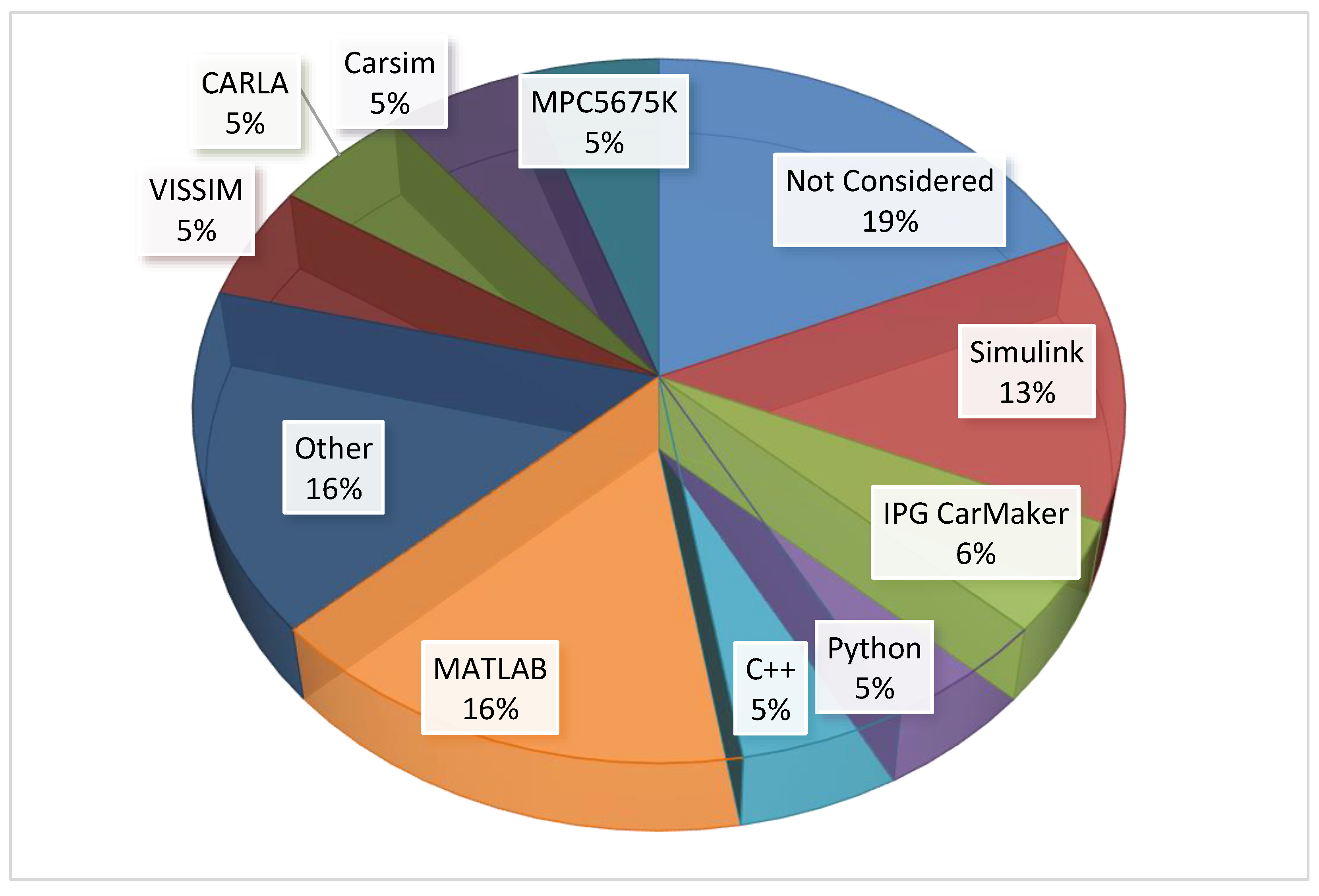{kind=link}
Table 1.
Related surveys for autonomous vehicles.
| Ref | Category | Main Topic | Publication Year | Limitation | Our Contribution |
|---|---|---|---|---|---|
| Rosique et al. [2] | Autonomous vehicles’ sensors | A comprehensive survey of the sensors and software used for the perception and simulation of AV | 2019 | Limited to sensors, perception phase and simulators | We have considered more questions for the paper and, in addition to simulation, other issues such as algorithms, design methods, and model and architecture parameters have also been considered. |
| Rajabli et al. [3] | Autonomous vehicle software design | A systematic literature review of recent research on software verification and validation (V&V) of self-driving cars | 2021 | A specific view in a part of software design includes the V&V of autonomous vehicles. | We try to examine the design of self-driving vehicle systems in the broader scope, and categorize and examine general plans for improving safety. |
| Ma et al. [7] | Autonomous vehicle development approaches | This paper discussed artificial intelligence methods and approaches for autonomous vehicle applications and development. | 2020 | They focused on a specific domain of applications. | We are not limited to a group of methods. A taxonomy of the reviewed solutions is provided. |
| Rasouli et al. [5] | Autonomous vehicles’ accident avoidance | This paper worked on pedestrians’ communication with autonomous vehicles and methods and approaches for predicting and managing behavior. | 2019 | It only deals with accidents in which pedestrians play a role, and other influencing factors are not investigated. | We have considered the factors as part of the method and have reviewed the methods based on software and hardware requirements and different levels of automation. |
| Omeiza et al. [8] | Autonomous vehicle design and standards | Researchers have examined the existing standards and methods for designing autonomous vehicles and an overview of high-end design. | 2021 | The authors focused on standards and protocols. | We have considered standards and protocols as a branch of taxonomy, which we have mentioned in different approaches to the protocol used. |
| Kaur et al. [9] | Autonomous vehicles’ testing | The authors focused on testing methods, requirements, and simulators. | 2021 | Simulation requirements have been addressed in this article, but evaluation criteria have yet to be considered. | We have raised two questions regarding simulation as research questions in our article, which categorize the evaluation tools and criteria and determine the percentage of their use in the investigated methods. |
| Aradi et al. [6] | Autonomous vehicles’ motion management | Researchers examined motion management methods and approaches based on deep reinforcement learning | 2020 | It is both limited to a specific domain and restricted to particular approaches. | This article discusses various tools and algorithms that are used to ensure safety in automatic vehicles. |
| Akowuah et al. [11] | Autonomous vehicles’ security | Authors focused on security and attack management approaches in different components of autonomous vehicles | 2021 | It deals with security, which is an aspect of safety. | We are not limited to one requirement, and we have categorized the selected articles based on the design method from the point of view of the software. |
| Kim et al. [12] | Autonomous vehicles’ security | This paper categorized attacks and defense | 2021 | This paper focused on attacks on AV | Attacks carried out at the system level are considered a category of threats in the review of the methods, and we have also addressed other security threats. |
| Qin et al. [13] | Autonomous vehicle accident avoidance | The authors reviewed crash control algorithms and crash situation control based on the internal implementation of vehicles | 2021 | This article only targets security and privacy issues. | In addition to trust management solutions at the system level, examining other matters related to vehicle safety and failure solutions is necessary. |
| Pham et al. [14] | Connected autonomous vehicle attacks and security management | This paper focused on attack-handling on connected autonomous vehicles, and the authors analyzed open issues and challenges | 2021 | This paper focused on attacks on AV | Security and attack issues are considered one of the sub-branches in the classifying methods to provide a more general view of the existing methods. The primary category is based on the design method. |
| Shahrdar et al. [15] | Autonomous vehicles’ trust management | The paper reviewed the methods for trust management on the vehicles, components, and sensor level | 2021 | This paper works on trust management issues and challenges. | The software and hardware view are created to some extent in this article, but it is only limited to trust, and we have removed this limitation. |
| Sharma et al. [10] | Autonomous vehicle’s motions and behavior prediction | The authors focused on behavior prediction methods and solutions based on the software’s implementation | 2021 | This article also has a software perspective, but it is limited to the mobility of vehicles and their role in accidents. | We have addressed all the aspects related to the occurrence of an accident in the design of software systems. |
Table 2.
Research questions.
| Index | Research Question | Reason |
|---|---|---|
| 1 | What are the standard features, applications, and requirements for safety management in autonomous vehicles? | We design a taxonomy of components, requirements, applications, and standards for safety management intended for architectural design management from a software point of view. |
| 2 | Which methods and approaches are used to characterize safety in autonomous vehicles from a software point of view? | Existing architectural and system solutions and methods are categorized according to which simulation tools, strategies, and evaluation parameters can be examined. Finally, they can be improved to cover the existing challenges and open issues with less complexity. |
| 3 | What is the impact of AI methods on the safety management in autonomous vehicles? | A classification is provided based on AI techniques that can be used for future work. There is no classification in related works for the safety management and AI integration in autonomous vehicles. |
| 4 | Which metrics are used to evaluate design approaches in autonomous vehicles? | Evaluation parameters are specified so that existing methods can be reviewed and compared. |
| 5 | What are the most common tools and simulators in autonomous vehicles from a software point of view? | Simulation tools are categorized and analyzed in order to select the appropriate tools for evaluation in future work. |
| 6 | What are the open issues, challenges, and opportunities in the design of autonomous vehicle’s safety? | Challenges and open issues that need to be addressed in future work are extracted to accelerate improvements in existing methods. |
Table 3.
Search terms used in current research.
| Search Terms |
|---|
| “autonomous cars” AND “safety” |
| “autonomous vehicles” AND “safety” |
| “self-driving cars” AND “safety” |
Table 4.
Inclusion principles.
| # | Criteria |
|---|---|
| 1 | Papers must have software and sensor perspectives. |
| 2 | ISI journal papers will be selected. |
| 3 | Papers were published between 2018 and February 2023. |
Table 5.
Exclusion principles.
| # | Criteria |
|---|---|
| 1 | Evaluation and simulation methods are ambiguous. |
| 2 | Papers that do not cover cars and only raise other types of vehicles. |
| 3 | Papers that cover safety issues only with security issues and do not address environmental challenges such as roads |
| 4 | Papers are not about software and sensor requirements and perspectives. |
Table 6.
Reference databases.
| URL | Access Date | Database |
|---|---|---|
| http://ieeexplore.ieee.org | 30 February 2023 | IEEE |
| http://www.sciencedirect.com | 30 February 2023 | ScienceDirect.com |
| http://dl.acm.org | 30 February 2023 | ACM |
| http://www.springer.com | 30 February 2023 | Springer |
| http://onlinelibrary.wiley.com | 30 February 2023 | Wiley Online Library |
| https://0-www-mdpi-com.brum.beds.ac.uk/ | 30 February 2023 | MDPI |
Table 7.
Papers classification based on proposed taxonomy.
| # | Subject | Paper |
|---|---|---|
| 1 | Safety and autonomous vehicles surveys | 13 |
| 2 | Safety management components in autonomous vehicles | 7 |
| 3 | Fault management in autonomous vehicles | 10 |
| 4 | Architectures and frameworks based on safety | 15 |
| 5 | Safety model in autonomous vehicles | 8 |
| 6 | Traffic handling and control for safety | 17 |
Table 8.
Architectures and frameworks for safety management in AV.
| Research | Method | Advantage | Disadvantage | Simulation Tools | Evaluation Parameters | Techniques or Approaches |
|---|---|---|---|---|---|---|
| [31] | Using reinforcement learning method in risk management and evaluation | Static and dynamic barriers are considered in the evaluation scenarios | Environmental, network, and communication risks are not considered | CARLA | Performance | Reinforcement learning |
| [33] | Controlled all processes and environmental system | Pedestrians, traffic density, and all environmental parameters are considered. | Different layers like communication, network, and resource management are not considered. | C#.net | Accident detection | Agent-based modeling |
| [34] | Designed a method based on the 5G standard | Cover communication and network parameter | Different standards are used in real data and must be added for future work. | LTE EPC Network simulator | Delay and performance | Chaos theory |
| [35] | It is designed based on data collection and transmission handling | Covers mixed traffic and network parameters | Based on the 5G standard, using real data and different standards is difficult. | TensorFlow | Accident detection, performance | Deep learning |
| [36] | Designed based on signal and noise data management | Cover network environmental components | Computing complexity | ADA | Performance | Contract-based approach |
| [37] | Location-based architecture | Cover mobility of vehicles and different traffic density | Some resource management and computing constraints must be added for continuous localization | Not considered | Performance | Deep learning |
| [38] | A system for attacks’ and communication anomalies’ detection | Historical feedback is captured for detection improvement in the future | More machines and scalability must be considered. | Physical research simulator RDS1000 | Performance and accuracy | Recurrent Neural Network (RNN) |
| [32] | A conceptual model for cyber-security attacks and risk handling | Some factors are shared in security and safety, and it can improve these parameters | This method has some limitations, such as the lack of data sources, the uncertainty of future scenarios, and its complexity | Not considered | Not considered | System dynamics approach |
Table 9.
Fault-management approaches for safety in AV.
| Research | Method | Advantage | Disadvantage | Simulation Tools | Evaluation Parameters | Techniques or Approaches |
|---|---|---|---|---|---|---|
| [29] | Risk classification and fault handling based on the risks | It used real data for evaluation | There is no priority for risks, and it has complexity. | IPG CarMaker | Performance, time parameters | Simulation-based methodology |
| [39] | Designed based on path and lane controlling | Different scenarios are designed based on real data | Time parameters have not been measured. Resource constraints and computing complexity are not considered. And, it does not take into account all environmental factors. | Simulink | Performance | Sliding-mode controller |
| [40] | Fault prediction with environmental monitoring | Very accurate in fault detection | Higher complexity and real-time response are not considered | MATLAB/IPG CarMaker | The success rate for fault management | Supervised algorithm |
| [41] | Designed for hardware and sensor fault detection | Main operation parameters are considered | Focus on sensor failure and electronic control unit for hardware fault detection, but the other parameters are not considered. | Automotive simulator | Performance | Artificial DNA |
| [42] | This paper used camera data collection for environmental parameters handling in fault management. | Environmental parameters are covered and decrease accidents | The other data and scenarios are not considered. | Not considered | Performance, reliability | Deep learning |
| [44] | In addition to static environmental barriers, the possibility of collisions between vehicles is considered. | Main operation parameters are considered | Weather and environmental parameters are not considered. | MATLAB/Simulink | Performance | Probabilistic model |
| [45] | Focused on the communication layer and parameters | Risk handling regarding network and communication | The real-time reaction is not considered; complexity of real data | Prescan | Performance, the success rate for fault management | Supervised algorithm |
| [46] | Optimization methods for speed and acceleration control | Fault detection improvement | Time parameters Evaluation is not provided, and system performance may be more complex with real data. | MATLAB/Simulink | Performance, reliability | Model predictive control (MPC) |
| [47] | Event monitoring for fault detection | Vehicles’ mobility is covered | The real-time response must be considered. It is used only for static obstacles. | Python/C++ | Time parameters, performance, the success rate for fault management | Convex optimization |
| [48] | Security handling for attack management | Success rate improvement for different attack types | Real-time and mobility must be evaluated. | Not considered | The success rate for fault management | Functional perspective-based approach |
Table 10.
Safety parametric models for autonomous vehicles.
| Research | Method | Advantage | Disadvantage | Simulation Tools | Evaluation Parameters | Techniques or Approaches |
|---|---|---|---|---|---|---|
| [50] | A multi-objective function is provided for time and accident avoidance | Real data and scenarios are considered | Evaluation with related work must be considered | SUMO | Performance, the success rate for accident management | Coevolutionary algorithm |
| [51] | Parameters are added based on different risks | Environmental parameters are used for modeling. | Risk priority must be considered | Not considered | Performance | Artificial DNA |
| [52] | Work on system parameters | Parameters related to road rules and parameters related to traffic control and vehicle speed are considered, and real data and real roads are controlled | Complexity for scalability | VISSIM | Performance, the success rate for accident detection | Control algorithm |
| [55] | Multi-objective model based on pattern extraction using the reinforcement learning method | The real-time response must be considered | MPC5675K | Performance, the success rate for accident detection | Reinforcement learning | |
| [53] | A probabilistic modeling approach for cyber-attack problems | The model can capture the uncertainty and variability of cyber-attacks | Real and more scalable data must be considered | Eclipse MOSAIC | Hazard and accident detection and delay time | Probabilistic model |
| [54] | A model for lane-changing and collision -avoiding autonomous vehicles | Efficiency in delay reduction and fuel consumption | Complexity and different uncertain parameters in modeling | MATLAB and SUMO | Vehicle collision avoidance | Simulation-based approach |
Table 11.
Traffic handling approaches for safety management.
| Research | Method | Advantage | Disadvantage | Simulation Tools | Evaluation Parameters | Techniques or Approaches |
|---|---|---|---|---|---|---|
| [56] | Deep learning for resource management | Real data evaluation | Complexity | MATLAB | Performance, time parameters, the success rate for accident handling | Deep learning |
| [58] | Control algorithm for path monitoring | Mobility and traffic density handling | Real-time response is not considered | Not considered | Performance, accuracy | Control algorithm |
| [59] | Use of camera data for mixed obstacles handling | Different scenarios on real data | Complexity, and it does not support scalability | CARLA | Time parameters, performance | Graph neural network (GNN) |
| [60] | Design intelligent autonomous vehicles | Real-time responses are considered | Complexity for more scalable scenarios | MATLAB, CarSIM | Performance and time parameters | Dynamics-based state–space equations |
| [61] | Traffic handling based on environmental parameters | Mixed traffic is evaluated | Different parameters must be added | C++ | Performance, the success rate for accident management | Dynamics-based state–space equations |
| [62] | Scheduling based on traffic density | Real-time response and better configuration | More scenarios and more parameters must be added | MPC5675K | Performance, time parameters | Simulation-based approach |
| [63] | Pedestrian management for traffic handling | Works on priority with high-risk accidents covering | Complexity and higher cost for computation | MATLAB | The success rate for accident management | Control barrier function (CBF) |
| [64] | Traffic management based on traffic density and data collection | Use environmental parameters | Obstacles must be considered | CarSIM, Simulink | Performance, the success rate for accident management | Improved artificial potential fields (APFs) |
| [65] | Traffic management based on localization | Mobility handling | Complexity and it is not scalable | CCSL | Performance, the success rate for accident management | The spatial-clock stochastic and hybrid model |
| [66] | Traffic management with accident detection | More accurate | Real-time and resource management must be added | Not considered | Efficiency, accuracy | A novel inverse algorithm |
| [67] | Driver action handling | Accuracy improvement | Complexity and cost | Not considered | Performance, the success rate for accident management | A new system design |
| [68] | Framework for traffic with constraint management | Resource and cost management | The real-time response must be evaluated | Not considered | Performance, the success rate for accident management | Deep learning |
| [69] | Deep learning and neural network for traffic management | More flexible for different scenarios | Complexity and cost | Not considered | Performance, the success rate for accident management | |
| [57] | Machine learning techniques and convolutional neural networks for pedestrian detection | Performance improvement covers different data types. | Scalability and real data must be considered | Sumo and MATLAB | Performance | Convolutional neural networks |
| [54] | A model for changing lanes in autonomous vehicles | Different environmental situations are covered | Driver parameters must be added to the model | MATLAB/Simulink | Success rate | System modeling |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Abbasi, S.; Rahmani, A.M. Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review. Information 2023, 14, 555. https://0-doi-org.brum.beds.ac.uk/10.3390/info14100555
AMA Style
Abbasi S, Rahmani AM. Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review. Information. 2023; 14(10):555. https://0-doi-org.brum.beds.ac.uk/10.3390/info14100555
Chicago/Turabian StyleAbbasi, Shirin, and Amir Masoud Rahmani. 2023. "Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for Safety Management: A Systematic Review" Information 14, no. 10: 555. https://0-doi-org.brum.beds.ac.uk/10.3390/info14100555
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.