
A Review of Time-Based Solar Photovoltaic Tracking Systems
by
 , , and
, , and
Abdulwaheed Musa
1,2,* ,
,
Emmanuel Alozie
3 ,
,
Suleiman A. Suleiman
1, 
John Adedapo Ojo
4 and
Agbotiname Lucky Imoize
5,6,*
1
Department of Electrical and Computer Engineering, Kwara State University, Malete 241103, Nigeria
2
Institute for Intelligent Systems, University of Johannesburg, Johannesburg P.O. Box 524, South Africa
3
Department of Telecommunication Science, University of Ilorin, Ilorin 240003, Nigeria
4
Department of Electronic and Electrical Engineering, Ladoke Akintola University of Technology, Ogbomoso P.M.B. 4000, Nigeria
5
Department of Electrical and Electronics Engineering, Faculty of Engineering, University of Lagos, Akoka, Lagos 100213, Nigeria
6
Department of Electrical Engineering and Information Technology, Institute of Digital Communication, Ruhr University, 44801 Bochum, Germany
*
Authors to whom correspondence should be addressed.
Information 2023, 14(4), 211; https://0-doi-org.brum.beds.ac.uk/10.3390/info14040211
Submission received: 2 February 2023
/
Revised: 19 March 2023
/
Accepted: 28 March 2023
/
Published: 30 March 2023
(This article belongs to the Special Issue Information Applications in the Energy Sector)
Abstract
:Solar energy is the cleanest and most abundant form of energy that can be obtained from the Sun. Solar panels convert this energy to generate solar power, which can be used for various electrical purposes, particularly in rural areas. Maximum solar power can be generated only when the Sun is perpendicular to the panel, which can be achieved only for a few hours when using a fixed solar panel system, hence the development of an automatic solar tracking system. Over the years, different solar tracking systems have been proposed and developed, and a few have been reviewed in the literature. However, the existing review works have not adequately provided a comprehensive survey and taxonomies of these solar tracking systems to show the trends and possible further research direction. This paper aims to bridge these gaps by extensively reviewing these time-based solar tracking systems based on axis rotation and drive types. Lessons learned from the comprehensive review have been highlighted and discussed. Finally, critical open research issues are identified and elaborated.
1. Introduction
Renewable energy sources are energies that come from the Sun directly, such as thermal, photochemical, and photoelectric energy, or indirectly, such as wind, hydropower, and photosynthetic energy stored in biomass, as well as other climate regulation and natural motions, such as geothermal and tidal energy; these are then converted into usable forms of energy, such as electricity, heat, and fuels [1]. The most abundant renewable energy that is directly obtained from the Sun is solar energy, which also serves as a regulator of the hydrological cycle and a source of wind energy because the Sun’s heating effect on the atmosphere causes air to move [2,3].
Solar power, also known as solar energy, can be generated by a solar panel, which largely depends on the amount of sunlight it is exposed to. Solar photovoltaic energy has a much higher installed capacity than other renewable energy concepts and technologies due to its abundance, versatility, and ease of implementation with minimal negative environmental impact in terms of land use [4,5]. Maximum solar power can be obtained only when the Sun is directly on the panel. Due to the variation of the position of the Sun throughout the day, there is a need to adjust the solar panel so that it is always aimed precisely at the Sun. A solar tracker is a device employed to operate a solar photovoltaic panel, particularly in solar cell applications, and requires a high level of precision to ensure that sunlight is directed accurately onto the power device [6]. Solar tracking systems also play an important role in the advancement of solar concentration applications such as solar-pumped lasers and parabolic concentrators [7,8]. These trackers can improve the efficiency of the overall solar photovoltaic system, reducing the size and the cost per kilowatt hour (kWh).
To increase the efficiency of photovoltaic (PV) systems, several solar tracking systems have been developed over the years, and a few have been reviewed, for instance, [9,10,11,12,13]. However, these reviews did not consider hybrid solar trackers or learning-based solar tracking systems as most of these reviews are limited to classification based on two-axis, single-, and dual-axis solar tracking systems and classification based on the nature of motion, that is, active and passive solar tracking systems. This paper thus aims to provide a holistic review of the different existing developed time-based solar tracking systems based on various classifications to show the trend and proffer further research directions. The key contributions of this paper are as follows:
- An extensive review of solar tracking systems based on the axis of rotation is presented, including the hybrid-axis solar tracking system and a comparison based on different properties.
- A comprehensive analysis of solar tracking systems based on drive types is provided with an exhaustive review and a proposed taxonomy of these systems.
- An exhaustive review of learning-based solar tracking systems is presented, including a proposed taxonomy of these systems.
- Critical open research issues and future directions are identified for time-based solar tracking systems and elaborated.
The structure of the paper is as follows: the “Background of Solar Tracking Systems” in Section 2 presents the theoretical background of solar tracking systems. The “Classification Based on Axis Rotation” in Section 3 provides a review and comparison of solar tracking systems based on the movement of the axis of rotation, and the “Classification Based on Drive Types” in Section 4 presents a review and comparison of solar tracking systems based on drive types. The various learning-based solar tracking systems are reviewed in Section 5, “Learning-Based Solar Tracking Systems”. The “Lessons Learned” in Section 6 presents the salient points obtained from this current review. The “Further Research Directions” in Section 7 identifies and elaborates on the critical open research issues in time-based solar tracking systems, and finally, the “Conclusion” in Section 8 concludes the paper.
2. Background of Solar Tracking Systems
The amount of sunlight received varies throughout the year as a result of the motions of the Earth; however, the amount of solar energy received over a certain period on a surface that is perpendicular to the radiation’s path of propagation outside of the atmosphere at the mean earth–sun distance is known as the solar constant [14] and can be expressed mathematically as given in Equation (1):
where denotes the Stefan–Boltzmann constant (), is the radius of the Earth (6371 km), and denotes the average distance between the Sun and Earth ().
According to [12], the substantial amount of daily solar irradiation has led to the use of solar energy for power generation in a variety of applications, such as water pumping, telecommunication, and lighting. This has resulted in the design and implementation of solar photovoltaic panels, which can collect solar energy and convert it to other forms of energy, such as electrical energy. However, the amount of energy that may be produced is directly proportional to the intensity of the sunlight that falls on the panel. As a result, the necessity to build a system that can follow the position of the Sun over time has emerged, hence the solar tracking system. A solar tracking system can track the Sun’s movement and location over time to increase solar energy output, which in turn boosts electrical energy. Figure 1 shows the difference and limitations of the fixed solar tracking system compared to a simple solar tracking system.
For the accurate design, implementation, and installation of a solar tracking system, several parameters must be considered, such as the latitude, angle of incidence, solar irradiance, tilt angle, declination angle, elevation angle, zenith angle, orientation angle, solar azimuth angle, and inclination angle.
Latitude is a measure used to calculate the angular distance (south or north) of the equator in any location on Earth. The latitude angle can be measured in degrees. The angle of incidence is the most critical factor to consider when installing solar tracking systems. It is the angle formed by the Sun’s rays falling on the surface and the rays perpendicular to that surface.
Solar irradiance is another important parameter to consider, and it can be calculated by measuring the power of the light source or the luminous flux. The angle formed by the solar tracking system and the horizontal axis is known as the tilt angle. The angle of incidence is a variety of tilt angles. The declination angle is the angle formed between the equator and a line drawn from the center of the Sun to the center of the Earth. It can be expressed mathematically as given in Equation (2):
The elevation and zenith angles are similar to the declination angle: the elevation angle is the angle between the Sun’s center and the horizon, while the zenith angle is the angle formed by the center of the Sun and the vertical. They are both measured in degrees and expressed mathematically as shown in Equations (3) and (4), respectively:
where is the elevation angle, is the zenith angle, is the standard longitude that is positive for the east region and negative for the west, is the declination angle, and is the standard time.
The orientation angle can be used to adjust a solar tracking system to keep the solar photovoltaic module perpendicular to the Sun and generate the maximum power. The solar azimuth angle is defined as the angle formed by projecting the Sun’s center onto the horizontal plane and pointing due south. It is represented with a positive sign for the position east of south, and the position west of south is represented with a negative sign. It can be represented mathematically as given in Equation (5):
where is the solar azimuth angle, is the declination angle, is the zenith angle, and is the hour angle expressed as given in Equation (6):
The inclination angle is the angle between a photovoltaic module and the positive x-axis, measured in degrees. As shown in Figure 2, these variables can be used to determine the optimal location for installing a solar tracking system or to establish the best orientation for such systems to obtain the maximum solar power.
Although a solar tracking system can be used to maximize solar power, designing and implementing one is complex for a variety of reasons, including the need for intensive mathematical computations and detailed measurement of numerous solar parameters. It is also more expensive and sophisticated than a fixed-angle solar tracking system. The complexity, however, is determined by the number of axes utilized to move the solar panels horizontally or vertically.
3. Classification Based on Axis Rotation
According to the movement of the axis of rotation, two types of solar trackers have been designed and implemented in the literature. These include single-axis trackers and dual-axis trackers. In addition, some authors have designed and developed tracking systems with three or more axes categorized under hybrid-axis solar trackers. This section presents and reviews these time-based solar tracking systems based on the axis rotation.
3.1. Single-Axis Solar Tracking System
This solar tracking system comprises only one axis, either vertically or horizontally, and cannot rotate for both. Examples of this type of solar tracking system in the literature include Horizontal Single-Axis Trackers (HSAT), Vertical Single-Axis Trackers (VSAT), Tilted Single-Axis Trackers (TSAT), and Polar-Aligned Single-Axis Trackers (PASAT) [15]. Figure 3 depicts the various existing single-axis solar trackers.
HSAT rotates from north to south on a fixed axis parallel to the ground, as shown in Figure 3a, throughout the day and is considered the most economical tracker setup in many PV applications [16,17]. VSAT, on the other hand, rotates vertically with respect to the ground, as shown in Figure 3b, and can be mounted in either a north/south or east/west orientation to track the Sun’s movement up-and-down in the sky; such systems are more common in high-altitude/mountainous areas or more severe latitudes [16,17]. PASAT, as shown in Figure 3c, was derived by aligning the tilted single-axis solar tracker to the polar star [16]. Finally, the TSAT, shown in Figure 3d, has axes of rotation that alternate between horizontal and vertical, where the module sweeps a cylinder that is rotationally symmetrical around the rotation axis to track the Sun [6,16]. The solar azimuth angles of a single-axis solar tracking system range from −100° to 99.87° [18]. The following is a review of several developed single-axis time-based solar tracking systems.
In [19], a low-power single-axis solar tracking system was designed and developed to track the Sun’s position regardless of the motor speed and generate maximized solar power. The system implementation was divided into hardware and software parts, and the tracking system comprised two LDR sensors, a PIC16F877A microcontroller, a bi-directional DC-geared motor, a voltage regulator, a driver circuit, and a solar panel. To evaluate the performance of the developed system, a comparison with a fixed solar panel system was conducted in which the voltage and current for each system were measured between 8 a.m. to 6 p.m. The results showed that the developed system performed better than the fixed system by generating higher power. However, the system was not tested for different weather conditions.
In [20], a single-axis solar tracking system was developed based on LDR as a sensor. The methodology adopted for this research was divided into two parts, hardware development and programming development. The hardware development part was concerned with the components used to develop the solar tracker, which includes a solar panel, bidirectional DC geared motor, drive circuit, PIC16F667A microcontroller, two LDR sensors, and voltage regulator, while the programming development part was concerned with the development of the program that would be fed into the PIC16F667A microcontroller. To evaluate the performance of the developed solar tracker, a comparison with a fixed solar panel was conducted, and the results showed that the developed system received more sunlight and generated higher solar power than the fixed system. However, the research only considered sunny weather conditions and did not consider other weather conditions.
A high-efficiency single-axis solar tracking system was designed and developed in [21], where the system was based on a microcontroller focused primarily on small applications in remote areas. The tracking system consists of a power supply circuit, servo motor, light-dependent resistor (LDR), solar panel, liquid crystal display (LCD), real-time clock, and two different types of voltage regulators. The system was demonstrated to be a cost-effective solution and increased the solar output from the panel by 30–40% compared to the fixed solar panels.
In [22], a single-axis solar tracker to track the Sun on the azimuth axis by using an AVR microcontroller was designed and implemented. The implemented system consisted mainly of the ATmega328 controller, DC motor, light sensors, relay, and solar panel. The results showed that the designed low-cost solar tracker increased the output power gain by 18–25% compared to the fixed panel located at Kirkuk city, Iraq. The output power was increased and improved by adding an ear side panel and reflector by about 65% and 70–80%, respectively. However, the overall system is limited to just one axis, reducing reliability.
Analysis and implementation of a single-axis solar tracking system were carried out in [23] to recover the demand for electricity in rural areas. The tracking system comprised a microcontroller, two light-dependent resistor (LDR) sensors, a stepper motor, a battery, and a solar panel. The system was designed to compare the data from the LDRs and sensitivity so that the motor rotates clockwise if the measured difference between the set of sensors is greater than the sensitivity value and the direction pin on the microcontroller is high; otherwise, the motor rotates counterclockwise. In addition, data from the two LDR sensors were obtained and compared for sunny and cloudy days, and the result showed not many changes in the voltage levels.
A single-axis solar tracking system prototype was presented in [24], which includes the simulation, modeling, procedures, and results. The development process was divided into hardware and programming parts. The hardware development part dealt with the components utilized for the implementation of the tracking system which comprised two LDR sensors, a microcontroller, solar panel, voltage regulator, driver IC L293D, and DC gear motor, while the programming development was primarily concerned with the coding of the microcontroller and the process of operation where two pieces of software were utilized, Arduino and Eagle. To evaluate the performance of the developed prototype, a comparison with a fixed solar system was conducted, and the results showed that the developed system performed better. The major limitation of this research is that the small-scale implementation was not validated using the Sun but rather with a torch light.
In [25], a solar tracking system was utilized which operates based on light-dependent resistor (LDR) sensors, a microcontroller for controlling the system, and DC motors. The study aims to establish a cost-effective solar tracker system by identifying and removing the parts that consume unnecessary energy, reducing energy loss. To achieve this, a timer circuit was used to shut down the system for 29 min after one minute of work during which the amount of solar panel power gain and loss was measured due to the timer. A comparison of the tracking system with and without a timer was carried out, and the results showed that the tracking system with a timer is more efficient in terms of the measured gain and loss.
An automatic solar tracking system for maximized energy output was designed and implemented by [26] based on two mechanisms, a search mechanism (PILOT), which tracks the Sun’s position, and an optimal energy extraction mechanism (PANEL), which aligns the panel with the PILOT only if the maximum output energy can be extracted. The tracking system comprised a light-dependent resistor (LDR) and inductive proximity sensors (ultrasonic sensor), a microcontroller, voltage regulators, comparators, reset set (RS) flipflops, servomotors, a panel, variable resistors, a transducer, and an assembling structure. The proposed system is said to be an efficient and feasible way of tracking the Sun’s position and achieved a 25% output power increment at 10:00 a.m. compared to the fixed solar panels. However, the overall system design and analysis are complex.
To optimize a single-axis solar tracking system to function in different weather conditions [27], two single-axis solar tracking systems with a vertical axis of rotation were compared based on the readings of LDR photo sensors and based on astronomical calculations of the position of the Sun. The astronomical-based solar tracking system was designed and implemented using a built-in real-time SD card that has the coordinates of the Sun’s movement, where the system automatically sets the appropriate azimuth angle based on the date and time, while in the LDR-based solar tracking system, the microcontroller only starts when the sensor detects the sunrise. The systems were experimentally evaluated against each other, and generated voltage and current under different conditions were measured and used as a comparative factor. The results indicated that the astronomical-based solar tracker performed better than the LDR-based system, with an efficiency of 4.2%, and better than a fixed solar panel system, with an efficiency of 57.4%. The developed astronomical-based tracker can be utilized in regions with varying climatic conditions. However, the system can be prone to tracking errors as it relies on the Sun’s coordinates in the SD card, which can be wrong or corrupted.
The design, modeling, and experiment of a single-axis solar tracker that can remove incident sunlight overlapping on sensors inside the sunlight tracking system are presented in [28]. It can be determined from the results that the moveable PV panel by the tracker can improve power efficiency significantly. The system comprises micro-controller based LDR sensors and LCDs for observing and receiving signals from the Sun. This solar system can be used domestically to provide highly efficient solar energy. For commercial purposes, it can be manufactured in industry because the components of the solar tracker are recoverable and available at low prices. However, one main limitation of the system is that it depends on sunlight intensity. The panel will not move when the sunlight intensity is very low and hence cannot be used for other weather and climatic conditions.
A single-axis time-based solar tracking mechanism was proposed by [29] that can automatically track the movement of the Sun and then display the tilt angle values and the corresponding solar irradiance values in real time. The tracking unit comprises a solar panel, a real-time clock, a stepper motor, and a stepper motor driver. The study utilized the zenithal angle as a reference angle, which the microcontroller follows and then moves the stepper motor to track the position of the Sun. The system is a cost-effective, accurate, and efficient method to track the position of the Sun compared to a stationary solar panel.
3.2. Dual-Axis Solar Tracking System
This solar system has two degrees of flexibility that act as the axis of rotation; that is, it allows for maximized solar power output levels due to its ability to track the Sun both vertically and horizontally. Two common implementations are Tip-Tilt Dual-Axis Trackers (TTDAT) and Azimuth-Altitude Dual-Axis Trackers (AADAT). Figure 4 depicts the operation of a dual-axis solar tracking system.
TTDAT, as shown in Figure 4a, is so termed because the panel array is positioned on the top of vertical poles. Typically, the east–west movement is caused by rotating the array around the top of the pole. The posts at each end of the primary axis of rotation of a tip-tilt dual-axis tracker can be reused between trackers to reduce installation expenses [30]. The primary axis of AADAT, also known as the azimuth axis, is parallel to the ground while the secondary axis, also known as the elevation axis, is normal to the primary axis [30]. A servo motor for the azimuth axis (horizontal) and a linear actuator for the elevation axis (vertical) are used in an AADAT to track the Sun [31]. AADAT systems can use a huge ring mounted on the ground with the array positioned on a series of rollers rather than rotating the array around the top of the pole as shown in Figure 4b. This enables AADAT to support much larger arrays; however, the system cannot be positioned closer together than the diameter of the ring, which may diminish system density, especially when inter-tracker shadowing is included [30]. The solar azimuth and altitude angles of a dual-axis solar tracking system can range from 61.1° to 299.1° and −10.1° to 10.7°, respectively [32].
To ensure robust system performance, in [33] proposed a novel dual-axis solar tracking PV system design that leverages feedback control theory, a four-quadrant light-dependent resistor (LDR) sensor, and simple electronic circuits. The proposed system utilized a distinctive dual-axis AC motor and a stand-alone PV inverter to achieve solar tracking. The execution of the control was a technical innovation with a simple and effective design that did not require programming or a computer interface. In addition, a scaled-down laboratory prototype was built to test the scheme’s effectiveness, and experiment results indicated that the developed system increased the energy gain up to 28.31% for a partly cloudy day. The developed system achieved attractive features, but it is limited to a laboratory prototype with no real-life implementation.
In [34], a smart dual-axis solar system was proposed, where an embedded controller was utilized as the major system controller that detects the voltage difference and estimates the solar azimuth angle with four groups of cadmium-sulfide (CDS) as sensor elements. The control system comprises solar panels, motors, sensors, an A/D controller, an embedded controller, a drive circuit, and GSM modules. The system utilized two motors as an actuator to regulate the elevation and azimuth while the CDS tracked the position of the Sun through the movement of the embedded controller motor. The GSM module was used to notify the maintenance personnel in the event of a failure. A comparison between the proposed system and a fixed solar panel system was carried out under different weather conditions, and the results showed that the generated power increased by 30% when the proposed system was utilized.
The design and implementation of a dual-axis solar tracking system were presented by [35] based on a closed-loop technique. The system was divided into two parts, mechanical and electrical. The mechanical part, which was said to be the most challenging part of the development, dealt primarily with the azimuthal and vertical movements of the solar tracker and consisted of servo motors and panel carriers. The electrical part, which is concerned with sensing the sunlight and the movement of the panel in that direction, consists of four light sensors and an ATmega328P microcontroller. To evaluate the performance of the developed system, a comparison with other systems, which included the fixed solar panel system and the single-axis solar tracking system, was conducted, and the results showed that the developed dual-axis solar tracking system always outperformed the other systems. One major limitation of this research is that the developed system is limited to small-scale use.
In [36], the design and implementation of a two-axis solar tracking system were presented derived from a close-loop control system to track the Sun’s movement to obtain optimal power from the solar panel. The system comprised components that were categorized into five groups, namely, power supply, light sensor, stepper motor driver, display, and central processing units. To evaluate the performance of the system, a comparison with a fixed solar panel system was conducted, in which output voltages were measured every hour from 6 a.m. to 4 p.m., and the results showed an average increase in power output of about 10.7%. The research encompassed cost estimation, which showed that the developed system is cost-effective; however, the implemented system was not shown.
A double-axis solar tracking system was designed and implemented by [37], where the overall system design is divided into two parts, electrical and mechanical. The electrical part is further subdivided into control system design and programming. In contrast, the mechanical part comprises two DC motors that provide horizontal-to-vertical and left-to-right motions, as well as gears that transfer their movements to the solar panel. Other components include a light-dependent resistor (LDR), microcontroller, battery, mount limit switches, profile iron stand, and roller. To evaluate the performance of the system, a comparison was made between the proposed system and a stationary solar panel system; the results showed that the generated energy increased by 25% when the proposed system was utilized and based on the cost analysis carried out in the study, the proposed system is very cost-effective.
In [3], an automatic dual-axis solar tracking system was designed and developed using a light-dependent resistor (LDR) to determine the intensity of falling sunlight and DC motors on a mechanical structure with gear arrangement to track the Sun accurately. The results showed that the energy gained from the solar panel with the dual tracker exceeds 35% of the energy gained from the fixed solar panel. In analyzing the data, the energy gained from the solar tracker is mostly in the morning and the evening because there is little difference at noon, proving that the fixed solar panel is efficient at noon. One major limitation of the system is the cost, as the system utilizes four LDR sensors.
In [38], the design and implementation of a real-time clock (RTC)-based dual-axis automatic solar tracking system with I2C protocol (bi-directional bus) was presented, where one motor rotates the solar concentrator in an azimuth angle and adjusts the initial position of the solar concentrator while another motor adjusts the concentrator in the zenith angle. The performance of the developed system was tested and compared with the fixed solar tracking system, and experimental results showed that the real-time clock-based solar tracking system has 75% more average thermal gain when compared to fixed solar tracking systems. The developed system is cost-effective and has low power consumption. However, it was not implemented for solar PV systems.
In [39], a dual-axis solar tracking prototype was designed and developed that tracks the Sun in both horizontal and vertical axes. The tracking system was divided into hardware and software parts and utilized a solar panel, ATmega328P microcontroller, two servo motors, four LDR sensors, and four resistors. The prototype was said to be working efficiently in tracking the location of the Sun in correspondence with the movement of the motors from morning to evening using the sensors that act as self-adjusting light sensors. However, the major limitations of the research are that the developed system is a prototype with no real-life use, and the developed system was not evaluated against other existing tracking systems.
A dual-axis solar tracker was designed and implemented in [40] to supply additional power supply to a cleaning robot to extend its operating time. The tracking system comprises three parts: a solar tracker mechanical system, a solar tracker electronic system, and program algorithms embedded in the solar tracking controller. The performance of the system was evaluated in terms of PV module testing, battery charger testing, and an overall test, which compared the robot’s operation time with additional photovoltaics (PVs) and without. The results showed that the robot operates longer with PV by 7 min 17 s compared to without PV. Additionally, the average charging time of the battery using PV is 94 min and 48 s.
A simple, cost-effective algorithm-based reliable two-axis tracking system for real-time solar position measurement was developed in [41]. The research utilized the Astronomical Almanac’s (AA) algorithm due to its simplicity, reliability, and fast computability, which made it suitable to be implemented on an 8-bit microcontroller platform. To evaluate the accuracy of the algorithm, a comparison with other standard algorithms, Sun Position Algorithm (SPA) and Energy and Sustainable Economic Development (ENEA), was conducted using MATLAB simulation, and it was found that the ENEA algorithm’s accuracy was higher than that of the AA algorithm, but the ENEA algorithm will not be valid after 2022, and also the SPA is computationally expensive and not implementable in a low-speed, low-power-consuming microcontroller. Furthermore, the measured solar panel voltage also reflects that a close-loop algorithm-based dual-axis tracker can be implemented using an 8-bit microcontroller, which outperforms a conventional optical tracker without adding system cost. The proposed system has the benefit of high accuracy in tracking the Sun. However, the system was limited to prototype design and not real-life implementation.
The design, fabrication, and performance of a dual-axis solar tracking system were presented by [42], in which the components utilized to develop the system were divided into electrical and mechanical system designs. The electrical system design consisted of a solar panel, servo motors, light sensor, position sensor, microcontroller, and battery, while the mechanical part consisted of the actuator, rotor, and base box. To evaluate the performance of the developed system, a comparison with a fixed solar panel system was conducted, in which the current, voltage, and power were measured between 8 a.m. to 4 p.m. The results showed that the developed system performed better than the fixed system. However, the system was not evaluated for different weather conditions.
In [43], the design and implementation of a simple and cost-effective dual-axis solar tracking system were presented. The major components of the tracking system include four LDR optical resistors as sensors, two MG996R servo motors, actuators, a battery, a solar charge controller, and an Arduino microcontroller. The overall system was divided into hardware and software design, and the system was implemented and programmed. The performance of the developed system was evaluated based on the comparison between fixed solar panels, a single-axis solar tracking system, and the developed dual-axis solar tracking system, and the amperage and voltage produced by each system were measured. The experimental results showed that the developed system performed better than the other system, with an increased efficiency of 20.77%. The system is cost-effective and simple to implement. However, it has limitations, such as the fact that it cannot be monitored remotely.
In [44], a novel and low-cost dual-axis solar tracking system was developed using an Arduino microcontroller. The tracker system consisted of three main parts: the input from eight LDRs, the Arduino as the controller, and servomotors as outputs. To evaluate the performance of the developed system, an experimental comparison between a fixed solar panel system, single-axis solar tracking system, and the developed dual-axis solar system was conducted in terms of generated power, and the results showed that the developed system performed better than the other systems; however, no real-life implementation was done, hence the limitation of the research.
In [45], a dual-axis design of an automatic tracking system was developed to track the position of the Sun to ensure that the solar panel position is always positioned vertically from the Sun. The tracking system includes a solar panel, microcontroller, gear motor system, solar panels, and light-dependent resistors (LDR), which were utilized as a sensor. The system also comprises a real-time clock and limit switch, which resets the position of the solar panels at the end of the day. The design of the system is portable and can be used to increase the power output as well as the efficiency of the panels, reducing the pressure on fossil fuels and greenhouse gas emissions.
The work [46] designed and implemented a dual-axis solar tracker using LDR with Arduino Uno and used a stepper motor rather than a linear actuator to improve the overall tracker performance. The automated solar tracking system based on the Arduino prototype is mainly built using the Arduino Microcontroller, four LDRs, and three stepper motors. To evaluate the performance of the system, the proposed system was compared with a fixed solar PV system. The results showed that the proposed system performs better than a fixed solar panel by around 30–40% or more. The current implementation was based on sensors, and a real-time clock was not considered for the seasonal tracking of the Sun. Therefore, increasing the efficiency of the overall system would cause an equivalent increase in the cost of the system.
A dual-axis solar tracking system was designed and developed in [47] for a standalone PV system using worm gear. The system comprised solar cell plates, a PIC microcontroller, an LCD, a real-time clock, LDR sensors, DC motors, and servo motors. The performance of the system was evaluated against a fixed-axis solar panel, and the input and output power were measured and utilized to calculate the efficiency for different days. The results obtained showed that the proposed system performed better, with a power gain of 84% in the morning, and in the evening, the power gain was 100%. However, the developed system was limited to small-scale use.
3.3. Hybrid Solar Tracking System
The hybrid solar tracker, also known as the three-axis or triple-axis solar tracker, moves along three axes, allowing it to capture solar energy for the longest time of the day and with the most accurate alignment with the position of the Sun in different seasons and weather conditions [48].
Figure 5 depicts a hybrid solar tracker system developed in [49], which comprised a solar panel mounted between two vertical poles and a rotating horizontal surface adapted to mount the two vertical poles. A scissor lift approach was employed to smoothly move the axis up and down to obtain the third axis and minimize shading. The location of the Sun was tracked using four LDRs placed on top of the solar panel, and signals from these sensors are sent to the servo motor through the microcontroller, which thus moves the solar panel toward the direction of the Sun. Another LDR is connected at the bottom of the solar module and was used to automatically control the functioning of the third axis, sending signals to a relay and activating the DC motor to move the scissor lift upward when shading is detected. The system was compared with both fixed and dual-axis solar tracking systems in terms of power output and energy efficiency, and it was shown the hybrid system produced the highest power output, particularly in shading areas; however, it consumed more energy than the dual-axis solar tracking system. The relative error of the solar azimuth and altitude angles ranges from 0.844° to 0.251° and −0.498° to 0.576° [50].
A brief overview of the hybrid solar tracking system was presented in [48], where it was mentioned that the hybrid solar tracking system was developed to solve the problem faced by other tracking systems, especially on cloudy and overcast days. It was then concluded that the hybrid solar tracking system could work efficiently on both clear and cloudy days but stopped working on rainy days to conserve the use of generated power. However, the implementation of the hybrid tracking system is very complex due to the presence and synchronization of two tracking schemes.
A hybrid solar tracking system was proposed by [51], combining a mechanical and an electrical tracking system. The mechanical tracking system was based on a photodiode array (PDA) that was implemented using a sphere whose inner surface was optimized, allowing the PDA to function as a high-precision sensor. On the other hand, the electrical tracking system consisted of a maximum power point tracking (MPPT) feedback control system. The system was simulated, and it concluded that although the single solar tracking system is more efficient than the fixed solar panel, it cannot track the variation of the azimuth angle, which was hard-coded into the microcontroller of the proposed system. Additionally, the proposed system can track the Sun at any time, thus increasing the output power. The research did not implement the proposed system, hence the limitation.
The work [52] designed and implemented a two-axis microcontroller-based energy-efficient hybrid automatic solar tracking system aimed at improving solar conversion efficiency. The system utilized a microcontroller that operated a hybrid two-axis Sun tracker that functions in different weather conditions despite the long duration of the presence of clouds, where the tracker continuously measures the light intensity until the 3.70 V threshold is reached. To evaluate the performance of the proposed system, data from four different trackers, stationary, single-axis, dual-axis, and hybrid-axis, were collected. The results showed that the dual-axis tracking system outperformed the single-axis tracker by an 18% increment in power output. In contrast, the hybrid tracker system outperformed the stationary tracker by a 54% increment in the power output.
In [53], a multidimensional automatic solar tracking system was developed based on a hybrid hardware and software prototype that automatically provides the best alignment of a solar panel with the Sun to obtain the maximum power output. The tracking system comprised a sensor, a light-dependent resistor, a relay, a light-emitting diode, a stepper motor, a capacitor, gears, and a microcontroller. To evaluate the performance of the proposed system, measurements of the PV system were taken with and without a tracking system in the local climates of Bangladesh, and the results obtained showed that the overall efficiency of the solar power system increased by 31% with the tracker system.
A hybrid dual-axis solar tracking system was proposed by [54], where one motor runs continuously to track the movement of the Sun, and another motor runs once a month to track the Sun’s seasonal motion. To simplify the system’s design and implementation process, it was divided into two parts: the mechanical system and the electrical circuit design. To evaluate the performance of the designed system, a comparison between the proposed system, a static, and a continuous dual-axis solar tracking system was conducted, and it was found the proposed system has a 25.62% greater average power gain over the static system while it has a 4.2% lower average power gain over the continuous tracking system. The proposed system was achieved with low power consumption, high accuracy, and low cost; however, it is quite complex to implement.
A hybrid solar tracking device was proposed by [55], utilizing photo-sensors and GPS. The photo-sensor was utilized to track the Sun’s position when the solar radiation is greater than or equal to 400 W/m2 while the GPS data would be utilized when the solar radiation level falls below 400 W/m2. To evaluate the performance of the proposed device, a comparison with a photo-sensor solar tracking device was conducted in a low solar radiation condition, i.e., less than 400 W/m2, where precision errors were analyzed. The results showed that the hybrid solar tracking device operated more precisely than the photo-sensor solar tracking device, which indicated that it can be utilized for different weather conditions. The research did not consider the cost of the system.
An electromechanical system programmed using C++ was developed by [56] that controls the solar panel movement based on a hybrid-axis tracking system (one-axis and two-axis) so that it is always positioned towards the direction of the Sun. The major component of the tracking system includes solar panels, a deep cycle rechargeable battery, a microcontroller, signal conditioning circuits, and a motor drive, which are then connected to four-quadrant light-dependent resistor (LDR) sensors and a solar rotation mechanism. The system provides a reliable and cost-effective means of aligning a solar panel with the Sun to optimize energy output and efficiency by 31% when compared to a stationary solar panel.
The tracking system suitable for a smart photovoltaic blind (SPB) was investigated by [57], and an indirect tracking method was adopted as a preliminary study of a two-axis hybrid (direct and indirect) solar tracking method. According to the research, an SPB is a device that can be utilized for both electricity generation and Sun-shading functions and can be installed in the windows of buildings. The indirect tracking method was conducted via two steps: calculating the hourly altitude and azimuth of the Sun and calculating the hourly slope of the panel (SoP) and the azimuth of the panel (AoP) that are perpendicular to the altitude and azimuth of the Sun. The results obtained showed the SoP tracked the Sun from 0° to 90°, while the AoP tracked the Sun from −9° to 9°. The limitation of this research is that no solar tracking system was developed.
In [58], a new hybrid solar tracking system was designed and developed at King Mongkut’s Institute of Technology Ladkrabang, Bangkok, Thailand. The developed hybrid system comprised eight optical sensors from LDR for four directions, a local clock equation system, an atmospheric sensor, and two DC servo motors to check azimuth and altitude angles to determine the Sun’s position. To evaluate the performance of the developed solar tracking system, the outdoor temperature from the receiver was measured, the measured temperature was obtained to be 508.25 K, and other results indicated that the tolerances of the azimuth and altitude angles are less than ±2°, showing the high precision of the tracking system. The developed system did not generate solar power but rather just measured the temperature, hence the limitation.
In [59], an autonomous microcontroller-based solar tracking system was developed using a hybrid algorithm for tracking the position of the Sun. The proposed hybrid algorithm combined both sensors and mathematical models to estimate the position of the Sun to obtain optimal solar energy for all weather conditions. The tracking system comprised LDRs, an Arduino mega microcontroller, an Arduino Wi-Fi shield, a servomotor, a stepper motor and driver, an HMC5883L magnetometer, an ACS712 current sensor, and a solar panel with supporting metallic servo bracket. To evaluate the performance of the proposed hybrid algorithm, a comparison with active and chronological algorithms was conducted on sunny and cloudy days, and experimental results showed that the proposed algorithm yielded higher solar power for all weather conditions than the other algorithms. The solar tracking system based on the proposed algorithm can effectively produce higher solar power. However, it is not cost-effective as it comprises many components, hence the limitation of the research.
In [60], the fabrication and installation of a solar panel mount with a three-axis solar tracking controller were proposed. The major parts of the solar system are solar panels and solar cells. However, other components utilized include a battery, servo motors, AVR microcontroller, voltage regulator, liquid crystal display (LCD), real-time clock, and a light-dependent resistor (LDR). The proposed system was compared with a stationary solar panel, and the results showed that the proposed system increased the overall efficiency by 25%. However, the system is subject to some inherent limitations of the solar power system in terms of the cost of installation, inequivalence to the conventional power stations, conversion from direct current (DC) to alternating current (AC), and the unavailability of the solar energy at all times, especially at night.
In [61], the methodology adopted for designing and implementing a single-axis solar tracker prototype based on hybrid algorithms was presented. The MATLAB/Simulink simulation software was utilized before the experimental implementation to explore various designs for a solar tracking system, and testing and verification using the simulation were conducted. The proposed solar tracker comprised LDRs, an Arduino microcontroller connected to Wi-Fi, a servo motor, a current sensor, and a solar panel with a supporting metallic servo bracket. The system utilized both active and chronological algorithms. To validate the design prototype, two comparisons were conducted between the motor angle and Sun angle when the panel is fixed and when the panel is connected to the proposed single-axis tracker for the entire day, and the results showed that the proposed system increased electrical power by 22 to 56% more than the fixed panel system. The research was based on some assumptions and designed a small-scale solar tracker prototype. Table 1 is a comparison of the solar tracking systems according to axis rotation.
4. Classification Based on Drive Types
Apart from classification based on the axis rotation, the solar tracking system can also be classified based on its drive types. There are two major categories under this classification, active and passive solar tracking systems. This section discusses and reviews research works based on these categories.
4.1. Active Solar Tracking System
An active solar tracking system is a type of solar tracking system that utilizes motors and gear trains to align the solar panel towards the direction of the Sun as shown in Figure 6. It is a combination of open and closed-loop trackers. Active tracker systems come in several varieties that can be classified into single-axis, dual-axis, and chronological active solar tracking systems. Compared to passive trackers, active solar tracking systems provide better utilization of solar energy. However, they require regular maintenance due to the motors and moving parts, which can be expensive.
An active solar tracker based on the solar horizon coordinate system was developed in [62], where the horizon coordinate system was used to determine the position of the Sun at all times to align the panel towards the direction of the Sun. The system comprised Arduino Uno as the control system, two servo motors as a panel drive, a PLX-DAQ program for data monitoring, ACS–712 as the current sensor, and a DC voltage sensor as the output voltage sensor. The performance of the system was measured based on sensor characterization and output as well as on the effect of altitude and azimuth, for which measurements were conducted in two different cities, and the results obtained showed the developed system increased output power with a minimal relative error or difference between cities. However, the developed system was not compared with other systems.
4.1.1. Single-Axis Active Solar Tracking System
The design and implementation of a single-axis active solar tracking system were conducted by [63] based on Node MCU (ESP 8266 module). The system also comprised an LDR sensor, an L293D motor driver, a solar panel, a DC motor, and a serial monitor. The implemented tracking system was then utilized based on the light intensity falling on its surface to collect the output power data of the solar panel under different weather conditions, and it was found that the system can attain its peak voltage for a longer time, hence increasing output. The proposed system has numerous advantages. However, a 5V solar panel was utilized and only a single-axis was considered, hence the limitation of the system.
In [64], the design, modeling, and testing of a single-axis active solar tracking system were presented, showing that its portability and compactness allow for it to be mounted onto a wall. To prevent unnecessary energy consumption and provide flexibility, the system was designed to sleep at night and function under various weather conditions with different user preferences. MATLAB/Simulink was utilized first to model the system to determine its efficiency over other systems. Experimental results obtained in terms of the efficiency, power, and current output showed that the simulation results of the proposed system correspond to the fixed solar system; however, the limitation of the system is that it is affected by unmodelled external disturbances such as mechanical friction and wind loading, which meant the simulated output did not correspond with the experimental result.
4.1.2. Dual-Axis Active Solar Tracking System
The design and practical implementation of a simple dual-axis active solar tracker were conducted by [65] to track the movement of the Sun with very few components and cost-effectiveness. The system comprised the chassis, a monocrystalline solar panel, four LDR sensors, two servo motors, and a bearing, which was designed to control the motors based on the solar incidence measured by the four LDR sensors placed at the four corners of the solar panel. To minimize cost, the system was designed using a low-cost ATMega328 microcontroller, which was integrated into a low-cost Arduino Uno board. To evaluate the performance of the proposed system, a comparison with a fixed solar panel system was conducted, and a good efficiency of 36.25% was obtained. The developed system in this research was limited to small-scale implementation, hence the limitation of the methodology.
The major disadvantage of the active dual-axis solar tracking system is that the drive power is obtained from the output power of the solar panel itself. To solve this problem, in [66] presented a novel design that utilized a three-fold strategy to minimize the drive power consumption while satisfying the increased efficiency requirement. The strategy utilized includes (i) coupling the motor with the gearboxes to reduce the torque, (ii) combining gears and bearings to reduce the effect of high wind loading, and (iii) adopting a night-return algorithm to reset the whole system, reposition the solar panel to its initial position at night, and switch to sleep mode to save energy. To evaluate the performance of the developed system, a comparison between the proposed system, a fixed PV system, and a generic active dual-axis solar tracking system was conducted, and the voltage and current were measured. The results obtained showed that the proposed system performed better than the other system, with a significantly increased output power of 42%. The developed system can save energy and generate high-output power. However, not only is the system complex to implement but the strategy adopted is also at the expense of tracking sensitivity.
In [15], a cost-effective active dual-axis solar tracking system was developed to track the Sun’s movement. The tracking system utilizes LDRs to sense the Sun’s position and then sends these data to an Arduino Uno microcontroller, which processes the data and instructs a set of two servo motors that allow the panel to move and stay perpendicular to the Sun. The performance of the developed tracking system was evaluated using LabView and compared to a fixed solar tracking system, and the results showed that the developed system performed better with an average power gain of 13.44%. However, the developed solar tracking system is limited to small-scale use only.
In [67], an active dual-axis solar tracking system was developed based on three identical LDRs to track the Sun’s position at the strongest intensity of visible light. The tracking system comprised other major components, including an Arduino microcontroller, a solar panel, two DC motors, two batteries, an H bridge motor driver, and an LED bulb. The performance of the developed system was evaluated using both solar light and normal tube light. In both cases, the LDRs were able to detect the maximum intensity light, which was the Sun, and move the solar panel toward that direction. The developed system was also compared to a fixed solar panel system, and it was found that the power generation cost for the developed system was reduced. The major limitation of the developed system is the cost of implementation as it utilizes many components.
4.2. Passive Solar Tracking System
Passive solar trackers operate on thermo-hydraulic principles. Thermo-hydraulics is the study of hydraulic flows in thermal fluids that are affected by fluctuating temperatures or pressure [68]. In other words, thermal hydraulics is the study of gas pipeline pressures, temperatures, and flow rates while accounting for the thermal properties of the soil, pipe, and, if applicable, pipe insulation [69]. As shown in Figure 7, it is made up of two tube tanks that are mounted to the side of the PV panel [70]. Like the active tracker, passive tracker systems also come in several varieties that can be classified into single-axis, dual-axis, and hybrid passive solar tracking systems. The operating principle is not as complicated as that of active trackers. The cost of passive trackers is lower, and they are also less likely to be affected by illumination. Although they may not be as enticing as active trackers, they do provide good results. However, a peek at the negative aspects indicates that they are sluggish in the morning.
In [71] the design, construction, and testing of a passive solar tracker were described. It used R-134a, Tetrafluoroethylene (CF3CH2F), as the refrigerant medium to harvest more solar energy at a much lower cost than the available trackers. To store the refrigerant, two canisters were used as well as a copper conduit to connect them. The tracking system operated on the principle of a differential pressure-controlled system, where high-pressure refrigerant from one canister flows to another. Due to the imbalance in the weight of canisters, the panel will tilt in the direction of the side where the weight is high due to gravity. However, the height and angle of the shadow plates require adjustments according to the geographical location to achieve more solar tracking sensitivity.
A methodology for the detection and monitoring of the apparent movement of the Sun through a passive image acquisition system was presented by [72], where the proposed system operates by processing sky dome images to find the solar center. The system was economically viable to be implemented in low-cost solar applications that require solar tracking due to its cost-effectiveness and compatibility with multiple concentrated solar power (CSP) systems. The major advantage of the developed system was that it reached a field of view (FOV) of 180°, which showed the possibility of locating the Sun at any time of the day and is not affected by diffuse radiation. However, the Sun’s position cannot be localized on days with severe cloudiness, and the characterization of the solar tracking system to know the tracking precision was not performed.
4.2.1. Dual-Axis Passive Solar Tracking System
The design and implementation of a dual-axis passive solar tracker were developed by [73] with an average angular difference of 25 degrees to the position of the Sun under controlled conditions, using the thermal expansion properties of metals in a bimetallic strip as a base of operation. The system has two levels of flexibility, where one is used to track the Sun every day and is controlled automatically by the bimetallic strip, while the other is manually adjusted in seasonal shifts to compensate for variations in the Sun’s descent throughout the year. The proposed system’s construction was simple, and the production cost was low compared to existing methods. However, the system’s accuracy is modest, and it is not fully automated.
A novel low-cost solar tracker suitable to be used in equatorial regions around the world was presented in [74]. The proposed system was passively activated by aluminum/steel bimetallic strips and controlled by a viscous damper. Computer modeling predicted an increase in efficiency of up to 23% over fixed solar panels, and the design met its criteria by adopting a passive method of control––not draining power from the actual solar cell for movement. Although solar radiation may be insufficient in certain geographic locations, an adapted tilted/dual-axis system should provide accurate tracking in many locations other than those at the equator. Experimental testing showed excellent agreement with the computer model. However, the early morning response of the system is finite, the system’s applicability is restricted to only equatorial regions, and additional experimental testing is required to assess the system’s corrosion resistance, the effect of wind loading, and wear properties.
4.2.2. Hybrid-Axis Passive Solar Tracking System
A multiple-axis passive solar tracking concept was presented in [75] that took advantage of the thermal expansion-induced length variation of a material when exposed to sunshine. The differential expansion of three vertical thin flat strips with different orientations was amplified by a lever system to enable tracking of the apparent motion of the Sun in the sky. A passive solar tracking system prototype supporting a photovoltaic (PV) module was built and tested. The model and experimental results show that the tracking system using the azimuthal range tracker can correctly follow the azimuthal motion of the Sun during the day. The use of this tracking system led to a 28% increase in PV generation during the testing period. However, the proposed system has some limitations, including the relatively smaller thermal expansion coefficient of aluminum leading to small length variations, which entails higher requirements on the mechanical system. Additionally, the tracking system demands stringent clearance control and significant amplification of the leveraging system, thus requiring lever fine-tuning.
4.3. Chronological Solar Tracking System
A chronological solar tracking system is a time-based tracking system in which the structure is moved at a fixed rate and angle throughout the day as well as for different months [54]. Therefore, the motor or actuator is controlled to rotate at a slow average rate of one revolution per day. This method of solar tracking is more energy efficient because no energy is lost at this tracking calibration due to low tracking errors.
A laboratory-scale single-axis solar tracking system was designed and developed by [76] based on a chronological method that was implemented due to the high accuracy and energy efficiency it offered compared to the other types of solar tracking systems. The system comprised an LDR sensor, motor driver, microcontroller, motor, and encoder, which have their respective functions. The performance of the system was evaluated through a series of experiments in which two separate comparisons were conducted, and the power output and performance ratio of ±5° angle differences from 15° per hour were compared, and the power output and performance ratio of the angle of rotation 7.5° per 30 min was compared with the angle of rotation 15° per hour. The obtained showed that the 15° angle of rotation was preferred when compared with other angles due to its high-performance ratio of 0.83 and low power consumption. However, this developed system was not implemented on a large scale. Table 2 is a comparison between the solar tracking systems according to drive types.
5. Learning-Based Solar Tracking System
The section reviews the various research studies that integrated artificial intelligence (AI) models as well as other intelligent models for the efficient control of solar tracking systems over the past decade (2011–2022).
Artificial intelligence (AI) is a broad field that has applications in various sectors, including agriculture, finance, medicine, engineering, marketing, etc. It is one of the popular technologies that is widely utilized for control systems such as solar tracking systems. Several authors, over the years, have developed different AI-based models to control solar tracking systems which include logistic regression (LR), support vector regression (SVR), fuzzy logic (FL), adaptive neural fuzzy inference system (ANFIS), multilayer perceptron (MLP), genetic algorithm (GA), etc.
A solar tracking system was simulated using MATLAB/Simulink in [77], where a fuzzy logic controller (FLC) was utilized to control the system. The solar tracking system consisted of two permanent DC magnet (PDCM) motors, two LDRs, and two amplifiers utilized to drive the motors. The fuzzy logic controller has two inputs, error and change of rate of errors, and an output, controlled output change. For comparison and evaluation, the solar tracking system was designed using different fuzzy membership functions, and the results showed that the triangular-based FLC produced good and acceptable performances. The research only modeled the solar tracking system without any physical implementation.
An intelligent dual-axis solar tracking system was designed and developed in [78] based on fuzzy logic in which photo-resistor sensors were utilized to determine the direction of the sunlight. The overall system development was divided into three parts: the photosensors part, which comprised the four LDRs utilized to accurately track the sunlight; the second part, known as the controller and motor drivers, dealt with the hardware components of the solar tracking system, which included an eZdspF2812 board with DSP TMS320F2812 being the main controller of the tracking system. Finally, the third part is known as the algorithm, which dealt with designing the FLC for the tracking system. To evaluate the performance of the system, a 10 cm indicator was installed on the surface of the solar panel, and if accurately controlled, the solar panel would be perpendicular to the Sun; thus, the indicator would cast no shadow. The results obtained showed that there was the least amount of error in the afternoon. However, errors increased when the Sun started to set.
An artificial neural network (ANN) was utilized to identify and model a dual-axis solar tracking system in [79], where a proportional integral derivative (PID) with and without self-tuning fuzzy logic was utilized to control the solar tracker. To train the model, the input and out responses from the solar tracking system were regularly retrieved and stored after a random signal was produced using a function that was developed in Simulink and applied as an input signal. The system was designed so that root mean square error was utilized to evaluate the best epoch, and the 800 epoch was found to be the best training epoch. To obtain the best PID controller to control the system, a comparison was conducted between the conventional PID (cPID), PID without self-tuning fuzzy logic (PIDFL), and PID with self-tuning fuzzy logic (PIDSFL), and the results obtained showed that both PIDFL and PIDSFL performed better than the cPID, producing better results; however, the PIDSFL controller responded faster to disturbance than the other controllers. One major limitation of this research was that the developed system was not compared with other existing AI-based systems.
In [80], a fuzzy controller-based dual-axis solar tracking system was proposed to increase the efficiency of the tracking system. The tracking system comprised a solar panel, two DC motors, two actuators, and four PV cells that act like sensors, which were then utilized as inputs to the FLC to generate two outputs using 50 rules. To evaluate the performance of the proposed system, several simulation studies were conducted, and the results obtained showed that the proposed system was reliable and could be utilized to control several PV panels simultaneously. However, the proposed system was not compared with other existing systems.
A fuzzy logic-based solar tracking system using Arduino Uno was proposed by [81] in which MATLAB was utilized for implementing and testing the tracking system. The system comprised a Buck DC-DC converter, stepper motor, current-to-voltage (I2V) battery, and LDR sensory circuits. The fuzzy logic controller has two inputs, error and change of error, utilized to generate one output, the duty cycle. The system was designed and to evaluate its performance, a comparison with a fixed solar panel system was conducted where the output power was measured from 7 a.m. to 7 p.m. The results obtained showed that the FLC increases the efficiency of the overall system by 33.416% more than the fixed solar panel system.
In [82], different types of fuzzy membership functions were analyzed with respect to solar tracking systems where two inputs, light intensity and day, were utilized to generate two outputs, solar intensity direction, and tilt angle. The performance of the different types of membership functions, triangular, trapezoidal, and Gaussian, was evaluated from 6 a.m. to 6 p.m. using Qtfuzzylite, and a comparison of the proposed solar tracking system with a fixed solar panel system was conducted. The results showed that the triangular membership function performed better than the others with the lowest error percentage. Furthermore, the results also showed that the fuzzy-based system improved the overall system compared to the fixed system.
In [83], a prototype of a single-axis solar tracking system was developed based on fuzzy logic to optimally track the position of the Sun. The overall system implementation was divided into a mechanical part that comprised the system design and an electrical part. These were concerned with the design of the fuzzy logic controller where the LDR sensors were utilized as inputs, controlled by an Atmega 328 microcontroller in which the fuzzy rules and membership functions were designed, to generate output that moved the DC motors. To evaluate the performance of the system, several experiments were conducted to compare the output power of the developed system against a fixed solar panel system between 7 a.m. to 4 p.m., and the results obtained showed that the maximum power gain of the developed system was 47% more than the fixed solar panel system. Furthermore, it was concluded that the proposed fuzzy logic controller worked properly.
The design and implementation of a fuzzy decision support system (FDSS) were presented in [84] to control the movement of a solar panel and enhance the availability of solar energy and the efficiency of the system. Two fuzzy logic controllers were utilized, which comprised two inputs each, the maximum solar intensity in the eastward–westward direction and northward–southward direction, and their variation with the time, and these inputs were utilized to generate an output that controls the movement of the motors. The implemented scheme was concluded to reduce the cost of tracking, and it is an effective technique; however, the performance of the technique was not validated and was not compared with other existing schemes, hence the limitation of this study.
A dual-axis solar tracking system was designed and developed in [85] based on fuzzy logic. The system comprised an Arduino Uno microcontroller, four LDRs, two power window motors, a motor driver board, and an MPPT charger module. The FLC was designed such that it takes the two error values and two corresponding changes in error values as inputs that generate two outputs that would be fed to the power window motor. To evaluate the performance of the system, an experimental comparison with a non-tracking system was conducted, and the results showed that the developed system was able to provide an increase in output power efficiency by 18.13% over the static system.
A microcontroller-based single-axis solar tracking system was designed and presented by [86] in which fuzzy logic was utilized to maximize the efficiency of the PV panel by focusing the panel to be perpendicular to the sunlight. The developed tracking system consisted of four LDR sensors, LED sensors, DC motors and servomotors as actuators, and a PIC16F877A microcontroller as a controller. MPLAB software was utilized to simulate the system and was compared with a fixed solar panel system, and experimental results obtained showed that the efficiency of the designed system was 30.26% more than the fixed system. However, no real-life implementation was conducted.
In [87], a dual-axis solar tracking system was modeled using MATLAB/Simulink in which an FLC was designed to control the system. Various mathematical modeling steps were developed. To evaluate the performance of the proposed fuzzy-based tracking system, a comparison with both a static solar tracking system and PID-based solar tracking system in which the solar insolation generated as well as the generated panel output power were measured. The results obtained showed that the proposed system performed better than the other systems. However, the research did not implement any real-life tracking system.
In [88], a fuzzy logic-based dual-axis solar tracking system was proposed and developed to achieve maximum efficiency for solar panels. The tracking system comprised monocrystalline solar panels, lead-acid batteries, a gearbox, a stepping motor, and a light detection circuit. The software part comprised a detection system, a fuzzy tracking controller, and a database system. The FLC in this work was used to decide the timing for tracking the Sun. Specifically, it was designed to accept two inputs, sunlight sensor output and cell output current, to generate one output that would be fed into the motor to move or stop it based on the Sun’s position. To evaluate the performance of the developed system, a comparison with a fixed solar tracking system was conducted, and the results showed that the developed system is more accurate. Furthermore, the circuit design is simple, making it easy to control the angle without considering errors due to external environmental variations.
The work [89] proposed and developed the design and application for a single-axis solar tracking system based on fuzzy logic and PID controller in a real system. The control circuits were designed and built on an Atmega328 microcontroller. The software was installed into the control unit based on MATLAB simulations. The experimental result using real-time measurement data obtained showed that fuzzy controllers were more efficient than PID controllers for single-axis solar tracking systems by 2.39% and the energy obtained from the system using fuzzy logic for a solar tracking system increased by 21.2% compared to systems not using fuzzy logic for a solar tracking system. However, the interface for real-time data transmission and monitoring was not developed, and the sensitivity of the sensors used as input to the fuzzy logic control system was not optimized.
The work [90] proposed the use of artificial neural network (ANN) architecture to effectively predict the factors such as wind speed, air temperature, solar elevation angle, etc. that affect power production in a single-axis solar tracking system. In this research work, two feed-forward and backpropagation (FFBPN) models were developed, one for sunny days and the other for cloudy days. The performance of the developed models was evaluated using indicators such as mean square error (MSE), mean absolute error (MAE), root mean square error (RMSE), relative absolute error (RAE), root relative square error (RRSE), and correlation coefficient, and the experimental results showed that the developed models were perfect for prediction. However, the models still need to be projected for future estimation of power production.
The performance of two types of solar tracking systems was compared in [91] based on tetrahedron geometry using PID and fuzzy logic algorithms. The two dual-axis solar tracking systems were identically developed and comprised several components such as an Atmega 328 microcontroller, LDR sensor, solar cell, servo mini, data logger, etc. They were also developed with identical control system setups, but each utilized a different control programming algorithm, PID, and fuzzy logic. To evaluate the performance of the solar tracking systems based on the algorithms, a comparison of the energy generated by the solar cells was undertaken, and the results showed that fuzzy logic was relatively stable and generated larger energy on the solar cells than the PID.
In [92], a novel implementation of an FLC on a field-programmable gate array (FPGA) for a dual-axis solar tracking system was presented. The FLC was utilized to estimate the position of the Sun at different conditions in the day and was based on Mamdani rules, max-min operations, and alpha levels for defuzzification. The tracking system was designed in FPGA and comprised two servomotors and two solar intensity sensors utilized as inputs to the FLC. To evaluate the performance of the system, a scaled prototype was developed where experimental results were obtained for the FLC compared to the simulated and calculated results, which showed that the values obtained with the proposed FLC corresponded with both the other results. However, the research did not evaluate the proposed FLC with existing FLC-based tracking systems.
In [93], the performance of two algorithms, linear regression, and fuzzy logic in a dual-axis solar tracking system was compared to optimize the output power from a solar panel by constantly aligning it with the direction of sunlight. Three different solar modules were designed and developed where one is fixed while the others are dual-axis, each controlled by fuzzy logic and linear regression algorithm. To determine which system performed better, the calibration readings and the instantaneous power readings for all systems were measured and compared. The results showed that the fuzzy logic is best suited for dual-axis as it outperformed the linear regression algorithm by 1.3%. However, the system may malfunction under cloudy conditions.
A dual-axis solar tracking system was designed and developed in [94] based on an optimized fuzzy logic controller by genetic algorithm. The system comprised one DC motor, one actuator, a dual channel motor driver, two reed relays, etc. while the algorithm controlling the system was developed using MATLAB. After designing the fuzzy logic controller, the membership functions and rules were simultaneously found using a genetic algorithm. To evaluate the performance of the developed system, a comparison with a fixed solar panel system was conducted based on the power generated. The results obtained showed that the developed system performed better than the fixed system at varying rates based on the weather and climatic conditions.
In [95], a rapid and accurate method to track the position of the Sun using a dual-axis solar tracker was presented based on a closed-loop combination of a multilayer perceptron (MLP) neural network and a perturbation and observation (P & O) controlling procedure. The proposed algorithms were evaluated using two scenarios through MATLAB simulation. The results showed that the proposed method reduces tracking time and reaches more energy, thus increasing efficiency and flexibility. However, no real-life implementation was conducted in the research, hence the limitation.
The design and implementation of efficient single and dual-axis solar tracking control systems were proposed by [96] based on ANFIS models that can increase the performance of solar trackers, accurately estimate the Sun’s trajectory across the sky, and minimize tracking errors. The proposed models utilized the month of the year, day of the month, and the solar time of the day as inputs that can be utilized to estimate the orientation angle for the single-axis solar tracking system, while for the dual-axis, the variables can be utilized to predict the tilt and orientation angle. To evaluate the performance of the proposed ANFIS models, two statistical metrics, mean square error (MSE) and prediction rate (PR), as well as three scenarios, were utilized. The results showed that for both solar tracking systems, the ANFIS model with five membership functions was the most efficient, having the lowest MSE and highest PR, and it is suitable to be used as an intelligent controller for the tracking systems.
In [97], the design and evaluation of two controllers, PID, and fuzzy logic, of a dual-axis solar tracking system to keep the sunlight perpendicular to the solar panel and obtain a constant output power were evaluated. Both schemes were simulated in Simulink, where two tests, maintaining power output in its nominal power and following an arbitrary power reference, were conducted to evaluate the performance of the controller. The results obtained showed that fuzzy logic performed better as it has a shorter stabilization time, smaller amplitude, and a lower error percentage in the steady state. However, no real-life implementation was carried out in the research, hence the limitation.
In [98], a new efficient and low-complexity single and dual-axis solar tracking system was proposed based on the integration of a supervised logistic regression (LR), which includes binomial LR (BLR) or multinomial LR (MLR) and multilayer perceptron (MLP) or cascaded multilayer perceptron (CMLP), and which can be utilized to estimate both the tilt and orientation angles using two different datasets. The first dataset contains variables such as a month, day, and time while the second dataset consists of the month, day, time, current, voltage, and power radiation. The performance of the proposed models was evaluated, and the results showed that the use of one hidden layer for both systems achieved a smaller number of neurons when compared with using three hidden layers in conventional models. Furthermore, the proposed model achieved less time complexity when compared with the conventional methods. The research only evaluated the models required for efficient control of solar tracking systems without developing the solar tracking systems.
In [99], the most effective variables on orientation angles for single-axis solar tracking systems and orientation and tilt angles for dual-axis solar tracking systems were investigated and evaluated to select the most appropriate combination of the solar variables and intelligent predictors. These variables were obtained using correlation results between different input solar variables: day, month, time, current, voltage, and power radiation utilized to predict the output variables, tilt, or orientation angles. The overall implementation of the system was divided into five phases, where the first phase was concerned with the development of the solar tracking prototype. The second phase dealt with data collection, which was used for identifying the correct orientation and tilt angles for the tracking system. The third phase was concerned with finding a correlation between the collected variables, leading to the fourth phase, where the solar tracker was developed based on the results obtained from the correlation analysis and statistical rules. The final phase dealt with the evaluation of three intelligent predictors, LR, MLP, and CMLP in terms of the prediction rate and MSE, and the results obtained showed that LR is insufficient in developing dual-axis solar tracking systems and high prediction rates were obtained for both MLP and CMLP predictors with three hidden layers. However, CMLP has the best results for both single- and dual-axis solar tracking systems.
A single-axis solar tracking system was proposed and demonstrated by [100] based on an automatic fuzzy logic controller (FLC) that finds the best position of the solar panels corresponding to the Sun’s position. The fuzzy logic controller in this work utilized two inputs, error and sum, to generate one output which was fed into the linear actuator, which would then change the inclination angle of the solar panel. To evaluate the performance of the proposed system, a simulation was conducted using MATLAB/Simulink software, and the results obtained showed the proposed system can work effectively in both normal and cloudy conditions. However, the research did not implement any solar tracking system.
Several intelligent models have been utilized to control and enhance the efficiency of different solar tracking systems; however, the fuzzy logic is the most utilized model for controlling several developed solar tracking systems due to its simplicity and wide range of applications, and the results obtained showed that fuzzy logic can effectively increase the efficiency of the solar tracking system, thus increasing the solar power output when compared with other schemes such as PID and fixed solar panel systems. Furthermore, it can be seen that no models have been applied to control the hybrid solar tracking systems.
6. Lessons Learned
In this section, the lessons learned from this current review are all highlighted and discussed, which can be used as a guide for further research directions in this subject of interest.
- Lesson 1: LDRs are widely utilized for the Development of Solar Tracking Systems
Light-dependent resistors (LDRs), as shown in Figure 8, are also known as photocells, photoresistors, or photoconductors. They have been extensively useful for applications and scenarios that require a check for the presence or absence of light, such as alarm clocks, streetlights, etc. There are various types of LDRs which can be largely classified as intrinsic and extrinsic LDRs. From the review, it can be seen that LDRs have been extensively utilized for the development of solar tracking systems as they have been used to sense the presence of the highest level of sunlight, thus sending this sensed information to the microcontroller, which then instructs the servomotor to move the panels towards the direction of that highest level of sunlight. Thus, LDRs are mostly utilized to sense the presence of sunlight and have been utilized to track the position of the Sun.
- Lesson 2: Hybrid Solar Tracking System Produces the Maximum Output Power
The hybrid solar tracking system is a type of solar tracking system with more than two-way freedom in axis rotation and can be utilized to track the Sun efficiently, thus increasing output power. Compared to the other types of solar tracking systems, Table 1 shows that the hybrid solar tracking system generates the maximum output power because it can efficiently track the Sun despite its position, thus producing the highest power output irrespective of the weather and climatic conditions. However, one of the major disadvantages of the hybrid solar tracking system, apart from its complexity, is the implementation cost. These systems have been seen to require more components than other solar tracking systems, thus increasing the cost. Therefore, there is a need for a cost-effective implementation of the hybrid solar tracking system.
- Lesson 3: Autonomous Solar Tracking Systems
A solar tracking system can be remotely controlled particularly when IoT functionalities and components have been integrated. This can ensure adequate monitoring of the performance of the system for further analysis or to further maximize the efficiency of the system. An autonomous solar tracking system is also a system in which intelligent algorithms have been integrated into the microcontroller to not only maximize efficiency and produce increased solar output power but also to shut down and reset the system when it is not utilized, particularly at night when there is no Sun, thus conserving energy consumed by the system itself. Only a few of these autonomous solar tracking systems have been developed thus far, hence the need to develop a cost-effective tracking system that can accurately track the Sun and be controlled intelligently.
- Lesson 4: Fuzzy logic is extensively utilized for Controlling Solar Tracking Systems
Fuzzy logic is a mathematical model that can be utilized as a decision tool when all the input variables are not precise and qualitatively ambiguous. It has wide applications in several areas and research fields to make an informed decision based on one or more input parameters. In the same vein, from Table 3, it can be seen that among all other models and schemes, fuzzy logic has been extensively utilized to control several solar tracking systems, both for single- and dual-axis solar tracking systems, and results from various research studies showed that it improves the overall solar tracking system as well as increasing the generated output power when compared to other systems, particularly conventional PID (cPID) and fixed solar panel systems. However, fuzzy logic has not been applied to hybrid solar tracking systems.
7. Further Research Direction
This section identifies and elaborates further research directions for time-based solar tracking systems.
7.1. Application of Solar Tracking System to Smart Grid Interoperability
A smart grid is an advanced digital two-way energy information delivery system that is transparent, seamless, and instantaneous with foresight prediction under different uncertainties, enabling the electricity industry to manage energy delivery and transmission better and allowing consumers to have more control over energy decisions [101,102]. One of the key functions of the smart grid is the integration of renewable energy, which includes solar, wind, hydroelectric, and geothermal energy, of which solar energy is the most abundant form. However, there is a need to ensure maximum efficiency and increased output power for the solar aspect as well as interoperability with other power sources of the smart grid. Therefore, for future work, there is a need to integrate these solar tracking systems to maximize the solar output power and increase the solar power generated to enhance smart grid interoperability.
7.2. Integration of Learning-Based Algorithm to Hybrid Solar Tracking System
Over the years, the two common solar tracking systems that have been extensively researched and developed are single-axis and dual-axis solar tracking systems. Recently, researchers have extended the axis of rotation to accommodate more than two axes and combined these existing solar tracking systems to achieve what is known as a hybrid solar tracking system. From Table 3, it can be seen that none of these learning-based models have been applied to control the hybrid solar tracking system, and given the advantages of this system over its counterparts, it is imperative to enhance the system using these intelligent models. Therefore, it is recommended that future work investigates the application of intelligent models to hybrid solar tracking systems that can effectively control the solar tracking system as well as conserve the energy consumed in tracking the Sun.
7.3. Solar Tracking System Maintenance
One of the crucial problems of any implementation is the cost. This cuts across the cost of components and cost of development as well as the cost of maintenance. Maintenance is mostly neglected; however, it is critical to increasing these developed systems’ lifespan. Several authors, over the years, have tried to develop a cost-effective solar tracking system that can accurately track the Sun and generate an increased solar output power when compared with a fixed solar panel system. However, no maintenance strategy can be utilized to prolong the lifespan of these developed systems. Therefore, it is also recommended that future work investigates the development of a cost-effective procedure to maintain these solar tracking systems.
8. Conclusions
Solar energy is the most abundant form of energy that can be obtained from the Sun using a solar panel. One of the methods of obtaining the maximum power from these solar panels is the use of solar tracking systems. The paper has classified and reviewed the various types of solar tracking systems based on their axis rotation and drive types. Key findings from the review indicated that LDRs are extensively utilized as light sensors in these tracking systems. The hybrid solar tracking system is seen to produce the highest efficiency, however, at the expense of its implementation cost. Furthermore, fuzzy logic is the most utilized model for controlling solar tracking systems among all other learning-based models. For future work, critical open research issues in time-based solar tracking systems were identified and elaborated, which can be useful for the research community to attain a greater understanding and penetration of these tracking systems.
Author Contributions
The manuscript was written through the contributions of all authors. Conceptualization, A.M., E.A. and S.A.S.; methodology, A.M., E.A., S.A.S. and J.A.O.; software, J.A.O. and E.A.; validation, A.M., E.A., S.A.S. and J.A.O.; formal analysis, A.L.I.; investigation, A.M.; resources, A.M., E.A. and S.A.S.; data curation, A.M., E.A., S.A.S., A.L.I. and J.A.O.; writing—original draft preparation, E.A.; writing—review and editing, A.M., E.A., S.A.S., A.L.I. and J.A.O.; visualization A.M., E.A. and S.A.S.; supervision, A.M.; project administration, A.M., E.A., S.A.S., A.L.I. and J.A.O.; funding acquisition, A.M., J.A.O. and A.L.I. All authors have read and agreed to the published version of the manuscript.
Funding
This work is funded by the Nigerian Communications Commission (NCC) under Grant No. NCC/R&D/RP21/KSU/001 and the Tertiary Education Trust Fund (TETFund) under Institutional Based Research (IBR) Grant No. KWASUIBR/CRIT/070422/VOL2/TETF2021/0009.
Data Availability Statement
Not applicable.
Acknowledgments
The authors acknowledge their respective institutions and funding agencies for their support.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| AA | Astronomical Almanac | ||
| AADAT | Azimuth-Altitude Dual-Axis Tracker | ||
| AC | Alternating Current | ||
| AI | Artificial Intelligence | ||
| ANFIS | Adaptive Neural Fuzzy Inference System | ||
| AoP | Azimuth of Panel | ||
| BLR | Binomial Logistic Regression | ||
| CDS | Cadmium-Sulfide | ||
| CMLP | Cascaded Multilayer Perceptron | ||
| CSP | Concentrated Solar Power | ||
| DC | Direct Current | ||
| ENEA | Energy and Sustainable Economic Development | ||
| FFBPN | Feed-Forward and Backpropagation Network | ||
| FLC | Fuzzy Logic Controller | ||
| FoV | Field of View | ||
| FPGA | Field-Programmable Gate Array | ||
| GA | Genetic Algorithm | ||
| GSM | Global System for Mobile Communication | ||
| GPS | Global Positioning System | ||
| HSAT | Horizontal Single-Axis Tracker | ||
| LCD | Liquid Crystal Display | ||
| LDR | Light-Dependent Resistor | ||
| LR | Logistic Regression | ||
| MAE | Mean Absolute Error | ||
| MLP | Multilayer Perceptron | ||
| MLR | Multinomial Logistic Regression | ||
| MPPT | Maximum Power Point Tracking | ||
| MSE | Mean Square Error | ||
| PASAT | Polar-Aligned Single-Axis Tracker | ||
| PDA | Photodiode Array | ||
| PIC | Programmable Interface Controller | ||
| PID | Proportional–Integral–Derivative | ||
| PDCM | Permanent Direct Current Magnet | ||
| PV | Photovoltaic | ||
| PR | Prediction Rate | ||
| RAE | Relative Absolute Error | ||
| RMSE | Root Mean Square Error | ||
| RRSE | Root Relative Square Error | ||
| RS | Reset Set | ||
| RTC | Real-Time Clock | ||
| SoP | Slope of Panel | ||
| SPA | Sun Position Algorithm | ||
| SPB | Smart Photovoltaic Blind | ||
| SVR | Support Vector Regression | ||
| TSAT | Tilted Single-Axis Tracker | ||
| TTDAT | Tip-Tilt Dual-Axis Tracker | ||
| VSAT | Vertical Single-Axis Tracker | ||
| Wi-Fi | Wireless Fidelity | ||
| Symbols | |||
| Boltzmann constant | |||
| Tilt Angle | |||
| Radius of Earth | |||
| Average distance between the Sun and Earth | |||
| Elevation Angle | |||
| Solar Altitude Angle | |||
| Zenith Angle | |||
| Standard Longitude | |||
| Declination Angle | |||
| Standard Time | |||
| Solar Azimuth Angle | |||
| Surface Azimuth Angle | |||
| Hour Angle | |||
References
- Ellabban, O.; Abu-Rub, H.; Blaabjerg, F. Renewable Energy Resources: Current Status, Future Prospects and Their Enabling Technology. Renew. Sustain. Energy Rev. 2014, 39, 748–764. [Google Scholar] [CrossRef]
- Oghogho, I.; Sulaimon, O.; Egbune, D.; Abanihi, K. V Solar Energy Potential and Its Development for Sustainable Energy Generation in Nigeria: A Road Map to Achieving This Feat. Int. J. Eng. Manag. Sci. 2014, 5, 61–67. [Google Scholar]
- Mustafa, F.I.; Shakir, S.; Mustafa, F.F.; Naiyf, A.T. Simple Design and Implementation of Solar Tracking System Two Axis with Four Sensors for Baghdad City. In Proceedings of the 2018 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018. [Google Scholar]
- Choudhary, P.; Srivastava, R.K. Sustainability Perspectives—A Review for Solar Photovoltaic Trends and Growth Opportunities. J. Clean. Prod. 2019, 227, 589–612. [Google Scholar] [CrossRef]
- El Hammoumi, A.; Chtita, S.; Motahhir, S.; El Ghzizal, A. Solar PV Energy: From Material to Use, and the Most Commonly Used Techniques to Maximize the Power Output of PV Systems: A Focus on Solar Trackers and Floating Solar Panels. Energy Rep. 2022, 8, 11992–12010. [Google Scholar] [CrossRef]
- Ray, S.; Tripathi, A.K. Design and Development of Tilted Single Axis and Azimuth-Altitude Dual Axis Solar Tracking Systems. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; ISBN 9781467385879. [Google Scholar]
- Costa, H.; Liang, D.; Almeida, J.; Catela, M.; Garcia, D.; Tibúrcio, B.D.; Vistas, C.R. Seven-Rod Pumping Concept for Highly Stable Solar Laser Emission. Energies 2022, 15, 9140. [Google Scholar] [CrossRef]
- Tibúrcio, B.D.; Liang, D.; Almeida, J.; Garcia, D.; Catela, M.; Costa, H.; Vistas, C.R. Tracking Error Compensation Capacity Measurement of a Dual-Rod Side-Pumping Solar Laser. Renew. Energy 2022, 195, 1253–1261. [Google Scholar] [CrossRef]
- Muhammad, J.Y.; Tajudeen Jimoh, M.; Baba Kyari, I.; Abdullahi Gele, M.; Musa, I. A Review on Solar Tracking System: A Technique of Solar Power Output Enhancement. Eng. Sci. 2019, 4, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Hafez, A.Z.; Yousef, A.M.; Harag, N.M. Solar Tracking Systems: Technologies and Trackers Drive Types—A Review. Renew. Sustain. Energy Rev. 2018, 91, 754–782. [Google Scholar] [CrossRef]
- Amelia, A.R.; Irwan, Y.M.; Safwati, I.; Leow, W.Z.; Mat, M.H.; Rahim, M.S.A. Technologies of Solar Tracking Systems: A Review. IOP Conf. Ser. Mater. Sci. Eng. 2020, 767, 12052. [Google Scholar] [CrossRef]
- AL-Rousan, N.; Isa, N.A.M.; Desa, M.K.M. Advances in Solar Photovoltaic Tracking Systems: A Review. Renew. Sustain. Energy Rev. 2018, 82, 2548–2569. [Google Scholar] [CrossRef]
- Seme, S.; Štumberger, B.; Hadžiselimović, M.; Sredenšek, K. Solar Photovoltaic Tracking Systems for Electricity Generation: A Review. Energies 2020, 13, 4224. [Google Scholar] [CrossRef]
- Maatallah, T.; El Alimi, S.; Nassrallah, S. Ben Performance Modeling and Investigation of Fixed, Single and Dual-Axis Tracking Photovoltaic Panel in Monastir City, Tunisia. Renew. Sustain. Energy Rev. 2011, 15, 4053–4066. [Google Scholar] [CrossRef]
- Kaur, T.; Mahajan, S.; Verma, S.; Priyanka; Gambhir, J. Arduino Based Low Cost Active Dual Axis Solar Tracker. In Proceedings of the 1st IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems, ICPEICES 2016, Delhi, India, 4–6 July 2016; pp. 1–5. [Google Scholar]
- Racharla, S.; Rajan, K. Solar Tracking System—A Review. Int. J. Sustain. Eng. 2017, 10, 72–81. [Google Scholar]
- De Rooij, D. Single Axis Trackers. Available online: https://sinovoltaics.com/learning-center/csp/single-axis-trackers/ (accessed on 4 March 2023).
- Das, A.; Durgaprasad, S. Simulation and Implementation of Single Axis Solar Tracker. Int. Res. J. Eng. Technol. 2020, 7, 756. [Google Scholar]
- Ponniran, A.; Hashim, A.; Joret, A. A Design of Low Power Single Axis Solar Tracking System Regardless of Motor Speed. Int. J. Integr. Eng. 2011, 3, 5–9. [Google Scholar]
- Ponniran, A.; Hashim, A.; Ali Munir, H. A Design of Single Axis Sun Tracking System. In Proceedings of the 2011 5th International Power Engineering and Optimization Conference, Shah Alam, Malaysia, 6–7 June 2011; ISBN 9781457703546. [Google Scholar]
- Karthik, K.; Kumar, D. Design and Implementation of High Efficiency Solar Tracking System. Int. J. Eng. 2013, 2, 2886–2892. [Google Scholar]
- Akbar, H.S.; Fathallah, M.N.; Raoof, O.O. Efficient Single Axis Sun Tracker Design for Photovoltaic System Applications. IOSR J. Appl. Phys. 2017, 9, 53–60. [Google Scholar] [CrossRef]
- Aung, E.E. Single Axis Solar Tracking System. Int. J. Sci. Eng. Appl. 2019, 8, 283–286. [Google Scholar] [CrossRef]
- Gupta, S. Maximum Sunlight Tracking Using Single Axis Solar Panel Prototype with Simulation. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 221–225. [Google Scholar]
- Nori, A.F.; Mohammed, F.G. Design and Implementation of an Efficient Solar Tracker System. J. Phys. Conf. Ser. 2020, 1530, 12150. [Google Scholar] [CrossRef]
- Idoko, J.A.; Abubakar, I.N.; Yusuf, H.M.; Mustapha, B.M.; Adegboye, B.A. Design and Implementation of Automatic Solar Tracking System to Maximize Solar Energy Extraction. Bayero J. Eng. Technol. 2020, 15, 2020–2110. [Google Scholar]
- Kuttybay, N.; Saymbetov, A.; Mekhilef, S.; Nurgaliyev, M.; Tukymbekov, D.; Dosymbetova, G.; Meiirkhanov, A.; Svanbayev, Y. Optimized Single-Axis Schedule Solar Tracker in Different Weather Conditions. Energies 2020, 13, 5226. [Google Scholar] [CrossRef]
- Nahar, M.J.; Sarkar, M.R.; Uddin, M.; Hossain, M.F.; Rana, M.M.; Tanshen, M.R. Single Axis Solar Tracker for Maximizing Power Production and Sunlight Overlapping Removal on the Sensors of Tracker. Int. J. Robot. Control Syst. 2021, 1, 186–197. [Google Scholar] [CrossRef]
- Musa, A.; Suleiman, S.A.; Fijabi, M.M.; Hussain, A.O.; Ganiyu, I.A. Design and Implementation of a Real Time Clock Based Solar Tracking System. Zaria J. Electr. Eng. Technol. 2021, 10, 39–46. [Google Scholar]
- Balaji, B.; Arulvizhi, J.A. Maximum Solar Power Tracker Mechanically by Using Dual Axis Tracker. J. Int. J. Adv. Res. 2017, 3, 1157–1162. [Google Scholar]
- Driggs, D.; Mensah, P.; Stephen, A.; Fareed, D.; Jana, A. Dual Axis Solar Panel Optimized Using Programming Languages. In Proceedings of the 2006 GSW; ASEE Conferences, Tuscaloosa, AL, USA, 6–10 March 2006; Available online: https://sites.asee.org/se/publications/proceedings/2006-asee-se/ (accessed on 6 March 2023).
- Shufat, S.A.A.; Kurt, E.; Hancerlioğulları, A. Modeling and Design of Azimuth-Altitude Dual Axis Solar Tracker for Maximum Solar Energy Generation. Int. J. Renew. Energy Dev. 2019, 8, 7. [Google Scholar] [CrossRef]
- Wang, J.M.; Lu, C.L. Design and Implementation of a Sun Tracker with a Dual-Axis Single Motor for an Optical Sensor-Based Photovoltaic System. Sensors 2013, 13, 3157–3168. [Google Scholar] [CrossRef]
- Wu, Y.E.; Huang, K.C. Design and Implementation of Dual-Axis Solar Tracking System with GSM Fault Reporting Capability. In Applied Energy Technology; Trans Tech Publications Ltd.: Bäch, Switzerland, 2013; Volume 724, pp. 43–51. [Google Scholar]
- Munna, M.S.; Bhuyan, M.A.I.; Rahman, K.M.; Hoque, M.A. Design, Implementation and Performance Analysis of a Dual-Axis Autonomous Solar Tracker. In Proceedings of the 2015 International Conference on Green Energy and Technology, ICGET 2015, Dhaka, Bangladesh, 11 September 2015; pp. 1–5. [Google Scholar]
- Acakpovi, A.; Yaw, N.; Babbo, D. Low Cost Two-Axis Automatic Solar Tracking System. Commun. Appl. Electron. 2015, 3, 46–53. [Google Scholar] [CrossRef]
- Özer, T.; Mustafa Kelek, M.; Oğuz, Y.; Kivrak, S.; Kıvrak, S.; Şahin, M. Double Axis Solar Tracking System Design and Implementation. Int. J. Sci. Eng. Res. 2018, 9, 66–71. [Google Scholar]
- Kumar, K.N.; Subramaniam, V. Real Time Clock Based Energy Efficient Automatic Dual Axis Solar Tracking System. Eng. J. 2018, 22, 15–26. [Google Scholar] [CrossRef]
- Patro, V.; Kumar, C.P.; Godthi, P.; Murugan, S. Dual Axis Solar Tracker System. Int. J. Adv. Res. Basic Eng. Sci. Technol. 2018, 4, 82–93. [Google Scholar]
- Wicaksono, D.S.; Musafa, A. Design and Implementation of Dual Axis Solar Tracker {PV} to Increase Cleaning Robot Operating Time. J. Phys. Conf. Ser. 2019, 1376, 12022. [Google Scholar] [CrossRef] [Green Version]
- Chowdhury, M.E.H.; Khandakar, A.; Hossain, B.; Abouhasera, R. A Low-Cost Closed-Loop Solar Tracking System Based on the Sun Position Algorithm. J. Sens. 2019, 2019, 3681031. [Google Scholar]
- Munshi, R.; Hussain, F.; Bristi, F.; Karmoker, S.K.; Zefat, Z.M.; Sumu, F.B. Design and Fabrication of Microcontroller-Based Dual Axis Light-Sensitive Rotating Solar Panel. Adv. Mater. Process. Technol. 2020, 8, 444–460. [Google Scholar] [CrossRef]
- Nguyen, B.T.; Ho, H.X.T. Design, Implementation and Performance Analysis of a Dual Axis Solar Tracking System. Adv. Sci. Technol. Eng. Syst. 2020, 5, 41–45. [Google Scholar] [CrossRef]
- Awad, S.R.; Al Jbaar, M.A.; Abdullah, M.A.M. Efficient and Low-Cost Arduino Based Solar Tracking System. IOP Conf. Ser. Mater. Sci. Eng. 2020, 745, 012016. [Google Scholar] [CrossRef]
- Ali, F.B.; Chakma, R.; Raihan, A.; Hasan, M.; Khan, M.F.S.; Alam, M.J.; Akter, R.; Mahtab, S.S. Design and Implementation of a Time-Based Sun Tracking Solar System. AIP Conf. Proc. 2021, 2327, 20024. [Google Scholar] [CrossRef]
- Mohanapriya, V.; Manimegalai, V.; Praveenkumar, V.; Sakthivel, P. Implementation of Dual Axis Solar Tracking System. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1084, 012073. [Google Scholar] [CrossRef]
- Prakash, M.B.; Govindarajulu, K. Analysis and Testing of Dual Axis Solar Tracker for Standalone PV Systems Using Worm Gear. Int. J. Mod. Trends Sci. Technol. 2022, 8, 1–8. [Google Scholar]
- Tamang, D.; Roy, O.P. Hybrid Solar Tracking System: A Brief Overview. In Proceedings of the 2019 3rd IEEE International Conference on Electrical, Computer and Communication Technologies, ICECCT 2019, Coimbatore, India, 20–22 February 2019; pp. 1–5. [Google Scholar]
- Gupta, P.; Gupta, V.; Sharma, M.; Pachauri, R.K.; Akhtar, J. Design and Performance Analysis of Three Axis Solar Tracking System. In Proceedings of the 2022 7th Asia Conference on Power and Electrical Engineering (ACPEE), Hangzhou, China, 15–17 April 2022; pp. 1876–1880. [Google Scholar]
- Zhang, J.; Yin, Z.; Jin, P. Error Analysis and Auto Correction of Hybrid Solar Tracking System Using Photo Sensors and Orientation Algorithm. Energy 2019, 182, 585–593. [Google Scholar] [CrossRef]
- Siddharth, P.S.; Ganesh, S.; Sreenath, S. A Hybrid Solar Tracking System. Int. J. Electr. Electron. Eng. Res. 2013, 3, 77–80. [Google Scholar]
- Mohammad, N.; Karim, T. Design and Implementation of Hybrid Automatic Solar-Tracking System. J. Sol. Energy Eng. Trans. ASME 2013, 135, 011013. [Google Scholar] [CrossRef]
- Mumtahina, U.; Bhuiya, M.; Sayem, A.; N, A.; Mohammad, N. Design and Implementation of a Multi-Dimensional Automatic Solar Tracking System. Energy Technol. 2014, 6, 1–11. [Google Scholar]
- Ferdaus, R.A.; Mohammed, M.A.; Rahman, S.; Salehin, S.; Mannan, M.A. Energy Efficient Hybrid Dual Axis Solar Tracking System. J. Renew. Energy 2014, 2014, 629717. [Google Scholar] [CrossRef]
- Lee, H.G.; Kim, S.S.; Kim, S.J.; Park, S.J.; Yun, C.W.; Im, G. Pyeong Development of a Hybrid Solar Tracking Device Using a GPS and a Photo-Sensor Capable of Operating at Low Solar Radiation Intensity. J. Korean Phys. Soc. 2015, 67, 980–985. [Google Scholar] [CrossRef]
- Abdulrahman, A.; Hamoud, A.; Al-Nehari, A.; Almakhlafy, M. Design and Implementation of Solar Tracking System. In Proceedings of the 2015 International Conference on Applied Science and Engineering Innovation (ASEI 2015), Jinan, China, 30–31 August 2015; Volume 12, pp. 785–788. [Google Scholar] [CrossRef] [Green Version]
- Hong, T.; Jeong, K.; Ban, C.; Oh, J.; Koo, C.; Kim, J.; Lee, M. A Preliminary Study on the 2-Axis Hybrid Solar Tracking Method for the Smart Photovoltaic Blind. Energy Procedia 2016, 88, 484–490. [Google Scholar] [CrossRef] [Green Version]
- Jianwattananukul, K.; Locharoenrat, K.; Lekchaum, S. Design and Construction of New Hybrid Solar Tracking System. In Applied Mechanics and Materials; Trans Tech Publications: Bäch, Switzerland, 2016; Volume 851, pp. 510–515. [Google Scholar]
- Tharamuttam, J.K.; Ng, A.K. Design and Development of an Automatic Solar Tracker. Energy Procedia 2017, 143, 629–634. [Google Scholar] [CrossRef]
- Haider, M.R.; Shufian, A.; Alam, M.N.; Hossain, M.I.; Islam, R.; Azim, M.A. Design and Implementation of Three-Axis Solar Tracking System with High Efficiency. In Proceedings of the 2021 International Conference on Information and Communication Technology for Sustainable Development, ICICT4SD 2021, Dhaka, Bangladesh, 27–28 February 2021; pp. 1–5. [Google Scholar]
- Baouche, F.Z.; Abderezzak, B.; Ladmi, A.; Arbaoui, K.; Suciu, G.; Mihaltan, T.C.; Raboaca, M.S.; Hudișteanu, S.V.; Țurcanu, F.E. Design and Simulation of a Solar Tracking System for PV. Appl. Sci. 2022, 12, 9682. [Google Scholar] [CrossRef]
- Indrasari, W.; Fahdiran, R.; Budi, E.; Jannah, L.; Kadarwati, L.; Ramli, R. Active Solar Tracker Based on The Horizon Coordinate System. J. Phys. Conf. Ser. 2018, 1120, 12102. [Google Scholar] [CrossRef]
- Ghosh, J.; Dey, N.; Das, P. Active Solar Tracking System Using Node MCU. In Proceedings of the 2019 International Conference on Computing, Power and Communication Technologies, GUCON 2019, New Delhi, India, 27–28 September 2019; pp. 924–928. [Google Scholar]
- Chin, C.S.; Babu, A.; McBride, W. Design, Modeling and Testing of a Standalone Single Axis Active Solar Tracker Using MATLAB/Simulink. Renew. Energy 2011, 36, 3075–3090. [Google Scholar] [CrossRef]
- Hammoumi, A.E.; Motahhir, S.; El Ghzizal, A.; Chalh, A.; Derouich, A. A Simple and Low-Cost Active Dual-Axis Solar Tracker. Energy Sci. Eng. 2018, 6, 607–620. [Google Scholar] [CrossRef] [Green Version]
- Rambhowan, Y.; Oree, V. Improving the Dual-Axis Solar Tracking System Efficiency via Drive Power Consumption Optimization. Appl. Sol. Energy Engl. Transl. Geliotekhnika 2014, 50, 74–80. [Google Scholar] [CrossRef]
- Patil, A.; Dhavalikar, M.; Dingare, S.; Bhojwani, V. Design and Prototyping of Dual Axis Solar Tracking System for Performance Enhancement of Solar Photo-Voltaic Power Plant. In Proceedings of the E3S Web of Conferences, Pune City, India, 18–20 December 2019; EDP Sciences: Les Ulis, France, 2020; Volume 170, p. 1011. [Google Scholar]
- Thunberg, W. Thermal Hydraulics Simulations for Nuclear Energy. Master Thesis, Uppsala University, Uppsala, Sweden, 2022; pp. 1–22. [Google Scholar]
- Bestion, D. The Structure of System Thermal-Hydraulic (SYS-TH) Code for Nuclear Energy Applications. In Thermal-Hydraulics of Water Cooled Nuclear Reactors; Elsevier: Amsterdam, The Netherlands, 2017; pp. 639–727. ISBN 9780081006627. [Google Scholar]
- Deekshith, K.; Aravind, D.; Nagaraju, H.; Reddy, B. Solar Tracking System. Int. J. Sci. Eng. Res. 2015, 6, 994–999. [Google Scholar]
- Krishnaraj, S.; Ravinthiran, A.; Ganapathy, S.; Siddharth, A.G.S.; Karan, K. Automatic Solar Panel Tracking System. Int. J. Innov. Technol. Explor. Eng. 2019, 9, 264–269. [Google Scholar] [CrossRef]
- Angulo, M.; Díaz-Ponce, A.; Valentín, L.; Valdivia, R.; Keshtkar, S. Design and Control of a Passive Solar Tracking System Using a Sky Imager. In Mechanisms and Machine Science; Hernandez, E.E., Keshtkar, S., Valdez, S.I., Eds.; Springer International Publishing: Cham, Switzerland, 2020; Volume 86, pp. 170–178. [Google Scholar]
- Sánchez, M.M.P.; Tamayo, D.B.; Estrada, R.H.C. Design and Construction of a Dual Axis Passive Solar Tracker, for Use on Yucatán. In Proceedings of the 2011 5th International Conference on Energy Sustainability, Washington, DC, USA, 7–10 August 2011; ISBN 9780791854686. [Google Scholar]
- Clifford, M.J.; Eastwood, D. Design of a Novel Passive Solar Tracker. Sol. Energy 2004, 77, 269–280. [Google Scholar] [CrossRef]
- Brito, M.C.; Pó, J.M.; Pereira, D.; Simões, F.; Rodriguez, R.; Amador, J.C. Passive Solar Tracker Based in the Differential Thermal Expansion of Vertical Strips. J. Renew. Sustain. Energy 2019, 11, 43701. [Google Scholar] [CrossRef]
- Roong, A.S.C.; Chong, S.H. Laboratory-Scale Single Axis Solar Tracking System: Design and Implementation. Int. J. Power Electron. Drive Syst. 2016, 7, 254–264. [Google Scholar] [CrossRef]
- Usta, M.A.; Akyazi, Ö.; Altaş, I.H. Design and Performance of Solar Tracking System with Fuzzy Logic Controller Used Different Membership Functions. In Proceedings of the 2011 7th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 1–4 December 2011; ISBN 9786050102048. [Google Scholar]
- Ataei, E.; Afshari, R.; Pourmina, M.A.; Karimian, M.R. Design and Construction of a Fuzzy Logic Dual Axis Solar Tracker Based on DSP. In Proceedings of the Proceedings—2011 2nd International Conference on Control, Instrumentation and Automation, ICCIA 2011, Shiraz, Iran, 27–29 December 2011; pp. 185–189. [Google Scholar]
- Shenawy, E.E.T.; Kamal, M.; Mohamad, M.A. Artificial Intelligent Control of a Solar Tracking System. J. Appl. Sci. Res. 2012, 8, 3971–3984. [Google Scholar]
- Batayneh, W.; Owais, A.; Nairoukh, M. An Intelligent Fuzzy Based Tracking Controller for a Dual-Axis Solar PV System. Autom. Constr. 2013, 29, 100–106. [Google Scholar] [CrossRef]
- Bawa, D.; Patil, C.Y. Fuzzy Control Based Solar Tracker Using Arduino Uno. Int. J. Eng. Innov. Technol. 2013, 2, 179–187. [Google Scholar]
- Rosario, J.R.B.D.; Dadios, E. Development of a Fuzzy Logic-Based PV Solar Tracking System Simulated Using QT Fuzzy Engine. In Proceedings of the 2014 International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management, Palawan, Philippines, 12–16 November 2014; pp. 1–8. [Google Scholar]
- Abadi, I.; Soeprijanto, A.; Musyafa, A. Design of Single Axis Solar Tracking System at Photovoltaic Panel Using Fuzzy Logic Controller. In Proceedings of the 5th Brunei International Conference on Engineering and Technology (BICET 2014), Bandar Seri Begawan, Brunei, 1–3 November 2014. [Google Scholar] [CrossRef] [Green Version]
- Stamatescu, I.; Stamatescu, G.; Arghira, N.; Făgărăsan, I.; Iliescu, S.S. Fuzzy Decision Support System for Solar Tracking Optimization. In Proceedings of the 2014 International Conference on Development and Application Systems (DAS), Suceava, Romania, 15–17 May 2014; pp. 16–20. [Google Scholar]
- Zakariah, A.; Jamian, J.J.; Yunus, M.A.M. Dual-Axis Solar Tracking System Based on Fuzzy Logic Control and Light Dependent Resistors as Feedback Path Elements. In Proceedings of the 2015 IEEE Student Conference on Research and Development (SCOReD), Kuala Lumpur, Malaysia, 13–14 December 2015; ISBN 9781467395724. [Google Scholar]
- Racharla, S.; Rajan, K.; Senthil Kumar, K.R. A Fuzzy Logic Controlled Single Axis Solar Tracking System. Appl. Mech. Mater. 2015, 787, 893–898. [Google Scholar] [CrossRef]
- Uebari, B.; Stanley Bere, B.; Komi, B.; Uebari, S.L. Design of Automatic Two-Axis Solar Tracker with Fuzzy Logic Controller for Maximum Power System in Nigeria. Int. J. Innov. Sci. Eng. Technol. 2016, 3, 329–336. [Google Scholar]
- Huang, C.H.; Pan, H.Y.; Lin, K.C. Development of Intelligent Fuzzy Controller for a Two-Axis Solar Tracking System. Appl. Sci. 2016, 6, 130. [Google Scholar] [CrossRef] [Green Version]
- Kiyak, E.; Gol, G. A Comparison of Fuzzy Logic and PID Controller for a Single-Axis Solar Tracking System. Renew. Wind. Water Sol. 2016, 3, 7. [Google Scholar] [CrossRef] [Green Version]
- Kayri, I.; Gencoglu, M.T. Prediction of Power Production from a Single Axis Photovoltaic System by Artificial Neural Networks. In Proceedings of the 2017 14th International Conference on Engineering of Modern Electric Systems (EMES), Oradea, Romania, 1–2 June 2017; ISBN 9781509060733. [Google Scholar]
- Away, Y.; Rahman, A.; Auliandra, T.R.; Firdaus, M. Performance Comparison between PID and Fuzzy Algorithm for Sun Tracker Based on Tetrahedron Geometry Sensor. In Proceedings of the2018 International Conference on Electrical Engineering and Informatics (ICELTICs), Banda Aceh, Indonesia, 19–20 September 2018; ISBN 9781538661406. [Google Scholar]
- Cruz-Alejo, J.d.l.; Antonio-Méndez, R.; Salazar-Pereyra, M. Fuzzy Logic Control on FPGA for Two Axes Solar Tracking. Neural Comput. Appl. 2019, 31, 2469–2483. [Google Scholar] [CrossRef]
- Lehloka, M.; Swart, J.; Hertzog, P. A Comparison of Two Automatic Solar Tracking Algorithms. E3S Web Conf. 2020, 152, 2009. [Google Scholar] [CrossRef]
- Toylan, H. Design and Application of Solar Tracking System Using Optimized Fuzzy Logic Controller by Genetic Algorithm. Mugla J. Sci. Technol. 2020, 6, 136–145. [Google Scholar] [CrossRef]
- Faraji, J.; Khanjanianpak, M.; Rezaei, M.; Kia, M.; Aliyan, E.; Dehghanian, P. Fast-Accurate Dual-Axis Solar Tracker Controlled by PO Technique with Neural Network Optimization. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe, EEEIC/I and CPS Europe 2020, Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
- AL-Rousan, N.; Isa, N.A.M.; Desa, M.K.M. Efficient Single and Dual Axis Solar Tracking System Controllers Based on Adaptive Neural Fuzzy Inference System. J. King Saud Univ.-Eng. Sci. 2020, 32, 459–469. [Google Scholar] [CrossRef]
- Ontiveros, J.J.; Avalos, C.D.; Loza, F.; Galan, N.D.; Rubio, G.J. Evaluation and Design of Power Controller of Two-Axis Solar Tracking by PID and FL for a Photovoltaic Module. Int. J. Photoenergy 2020, 2020, 8813732. [Google Scholar] [CrossRef]
- AL-Rousan, N.; Isa, N.A.M.; Desa, M.K.M.; AL-Najjar, H. Integration of Logistic Regression and Multilayer Perceptron for Intelligent Single and Dual Axis Solar Tracking Systems. Int. J. Intell. Syst. 2021, 36, 5605–5669. [Google Scholar] [CrossRef]
- AL-Rousan, N.; Isa, N.A.M.; Desa, M.K.M. Correlation Analysis and MLP/CMLP for Optimum Variables to Predict Orientation and Tilt Angles in Intelligent Solar Tracking Systems. Int. J. Energy Res. 2021, 45, 453–477. [Google Scholar] [CrossRef]
- Thang, L.V.; Myo Naing, Z.; Xuan Cuong, N.; DInh Hieu, L.; Anatolii, S. Research of Solar Tracking Controller for PV Panel Based on Fuzzy Logic Control. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2021, St. Petersburg, Russia, 26–29 January 2021; pp. 2696–2699. [Google Scholar]
- Hossain, M.R.; Oo, A.M.T.; Ali, A.B.M.S. Smart Grid. In Green Energy and Technology; Ali, A.B.M.S., Ed.; Springer: London, UK, 2013; Volume 132, pp. 23–44. ISBN 9781447152095. [Google Scholar]
- Dileep, G. A Survey on Smart Grid Technologies and Applications. Renew. Energy 2020, 146, 2589–2625. [Google Scholar] [CrossRef]
Figure 1.
Comparison between Fixed and Simple Solar Tracking Systems.

Figure 2.
Solar Angles.

Figure 3.
Various Single-axis Solar Tracking Systems. (a) HSAT; (b) VSAT; (c) PASAT; (d) TSAT.

Figure 4.
Various Dual-axis Solar Tracking Systems. (a) TTDAT; (b) AADAT.

Figure 5.
Hybrid Solar Tracking System.

Figure 6.
Active Solar Tracking System.

Figure 7.
Passive Tracking System.

Figure 8.
Light Dependent Resistor.


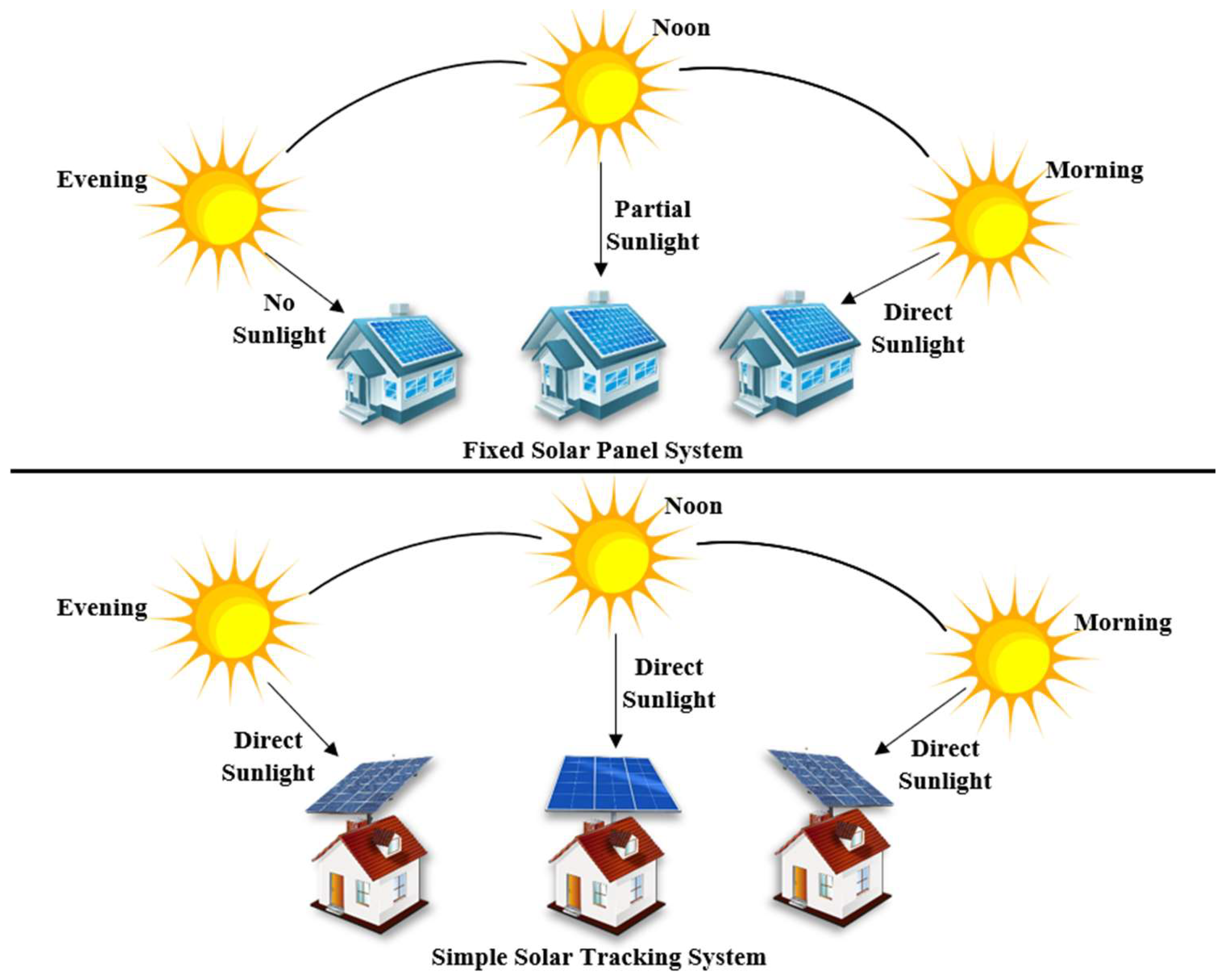{kind=link}
{kind=link}
{kind=link}
{kind=link}
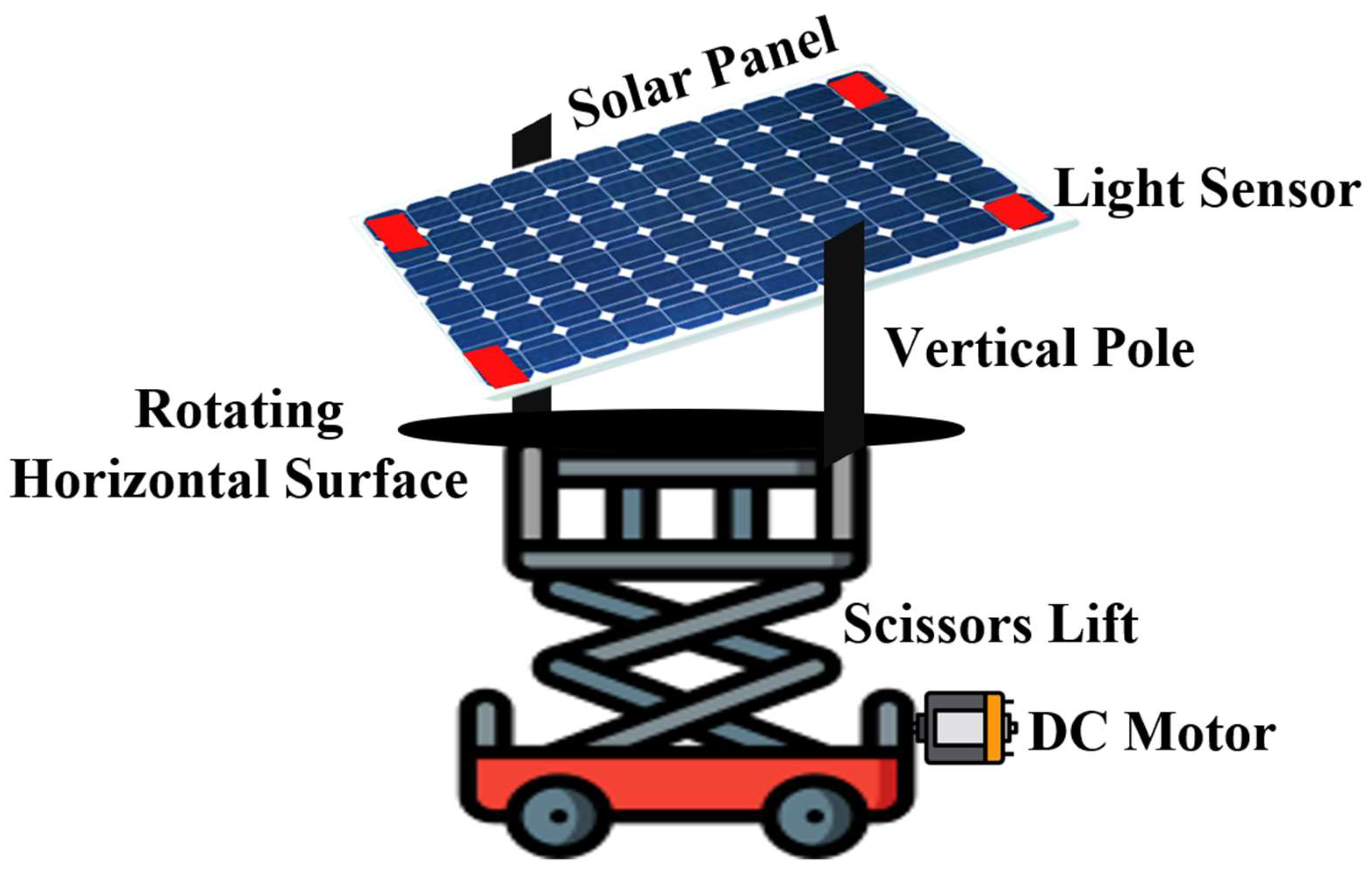{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison between the Solar Tracking System based on Axis rotation.
| Properties | Single-Axis | Dual-Axis | Hybrid-Axis |
|---|---|---|---|
| Cost | Cheap to implement | More expensive to implement than a single but less expensive than a hybrid | Most expensive to implement |
| Complexity | Less complex | High complexity | Very complex to implement |
| Tracking accuracy | It offers the least accuracy compared to the other types of trackers | It offers high accuracy compared to the single-axis | It offers the best accuracy as the Sun will be tracked at any angle and position |
| Number of Axis | It is limited to only one axis | It is limited to having only two axes | It can have three or more axes |
| Efficiency | Very reduced since it only tracks the Sun’s movement in the East–West direction, and during cloudy days, its efficiency is almost close to the fixed-angle solar tracking system | Has high efficiency as in addition to tracking the Sun’s movement from East–West, it also follows the angular height position of the Sun | Has the highest efficiency, especially during the cloudy days |
Table 2.
Comparison between the Solar Tracking System based on Drive types.
| Properties | Active | Passive | Chronological |
|---|---|---|---|
| Cost | Most expensive to implement | Cheap to implement | More expensive to implement than passive but less expensive than active |
| Complexity | It is more complex and requires more parts | It is less complex and requires few parts | It is complex |
| Reliability | More reliable | Less reliable | It is less reliable than passive |
| Energy | It requires an external source of energy to function | It does not require an external source of energy to function | It requires more energy to function |
| Accuracy | Most accurate | Less accurate | More accurate than passive but less than active |
| Monitoring and alarm | It can incorporate automated systems | It cannot incorporate automated systems | It can incorporate automated systems |
| Efficiency (morning and evening) | It has very efficient | It is less efficient because it is weather dependent | It is more efficient than passive |
| Low temperature | It can work at low temperature | It cannot work at low temperature | It cannot work on cloudy days |
| Wind | It can shut down and resume operation automatically during a windstorm | It has to be shut down manually during a windstorm | It cannot function during a windstorm |
Table 3.
Taxonomy of the Learning-Based Model for Solar Tracking Systems.
| Ref. | The Axis of Rotation Considered | ANFIS | Logistic Regression | MLP | Fuzzy Logic | ANN | FFBPN | Linear Regression |
|---|---|---|---|---|---|---|---|---|
| [77] | - | × | × | × | ✓ | × | × | × |
| [78] | Dual-axis | × | × | × | ✓ | × | × | × |
| [79] | Dual-axis | × | × | × | ✓ | ✓ | × | × |
| [80] | Dual-axis | × | × | × | ✓ | × | × | × |
| [81] | - | × | × | × | ✓ | × | × | × |
| [82] | - | × | × | × | ✓ | × | × | × |
| [83] | Single-axis | × | × | × | ✓ | × | × | × |
| [84] | - | × | × | × | ✓ | × | × | × |
| [85] | Dual-axis | × | × | × | ✓ | × | × | × |
| [86] | Single-axis | × | × | × | ✓ | × | × | × |
| [87] | Dual-axis | × | × | × | ✓ | × | × | × |
| [88] | Dual-axis | × | × | × | ✓ | × | × | × |
| [89] | Single-axis | × | × | × | ✓ | × | × | × |
| [90] | Single-axis | × | × | × | × | × | ✓ | × |
| [91] | Dual-axis | × | × | × | ✓ | × | × | × |
| [92] | Dual-axis | × | × | × | ✓ | × | × | × |
| [93] | Dual-axis | × | × | × | ✓ | × | × | ✓ |
| [94] | Dual-axis | × | × | × | ✓ | × | × | × |
| [95] | Dual-axis | × | × | ✓ | × | × | × | × |
| [96] | Single- and Dual-axis | ✓ | × | × | × | × | × | × |
| [97] | Dual-axis | × | × | × | ✓ | × | × | × |
| [98] | Single- and Dual-axis | × | ✓ | ✓ | × | × | × | × |
| [99] | Single- and Dual-axis | × | ✓ | ✓ | × | × | × | × |
| [100] | Single-axis | × | × | × | ✓ | × | × | × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Musa, A.; Alozie, E.; Suleiman, S.A.; Ojo, J.A.; Imoize, A.L. A Review of Time-Based Solar Photovoltaic Tracking Systems. Information 2023, 14, 211. https://0-doi-org.brum.beds.ac.uk/10.3390/info14040211
AMA Style
Musa A, Alozie E, Suleiman SA, Ojo JA, Imoize AL. A Review of Time-Based Solar Photovoltaic Tracking Systems. Information. 2023; 14(4):211. https://0-doi-org.brum.beds.ac.uk/10.3390/info14040211
Chicago/Turabian StyleMusa, Abdulwaheed, Emmanuel Alozie, Suleiman A. Suleiman, John Adedapo Ojo, and Agbotiname Lucky Imoize. 2023. "A Review of Time-Based Solar Photovoltaic Tracking Systems" Information 14, no. 4: 211. https://0-doi-org.brum.beds.ac.uk/10.3390/info14040211
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.