Optimal Excess-of-Loss Reinsurance for Stochastic Factor Risk Models


Department of Economics, University of Chieti-Pescara, 42-65127 Pescara, Italy
*
Author to whom correspondence should be addressed.
†
Current address: Viale Pindaro, 42-65127 Pescara, Italy.
‡
These authors contributed equally to this work.
Risks 2019, 7(2), 48; https://0-doi-org.brum.beds.ac.uk/10.3390/risks7020048
Submission received: 31 January 2019
/
Revised: 18 April 2019
/
Accepted: 26 April 2019
/
Published: 1 May 2019
(This article belongs to the Special Issue Applications of Stochastic Optimal Control to Economics and Finance)
Abstract
:We study the optimal excess-of-loss reinsurance problem when both the intensity of the claims arrival process and the claim size distribution are influenced by an exogenous stochastic factor. We assume that the insurer’s surplus is governed by a marked point process with dual-predictable projection affected by an environmental factor and that the insurance company can borrow and invest money at a constant real-valued risk-free interest rate r. Our model allows for stochastic risk premia, which take into account risk fluctuations. Using stochastic control theory based on the Hamilton-Jacobi-Bellman equation, we analyze the optimal reinsurance strategy under the criterion of maximizing the expected exponential utility of the terminal wealth. A verification theorem for the value function in terms of classical solutions of a backward partial differential equation is provided. Finally, some numerical results are discussed.
Keywords:
optimal reinsurance; excess-of-loss reinsurance; Hamilton-Jacobi-Bellman equation; stochastic factor model; stochastic controlMSC:
93E20; 91B30; 60G57; 60J75JEL Classification:
G220; C6101. Introduction
In this paper, we analyze the optimal excess-of-loss reinsurance problem from the insurer’s point of view, under the criterion of maximizing the expected utility of the terminal wealth. It is well known that the reinsurance policies are very effective tools for risk management. In fact, by means of a risk sharing agreement, they allow the insurer to reduce unexpected losses, to stabilize operating results, to increase business capacity and so on. Among the most common arrangements, the proportional and the excess-of-loss contracts are of great interest. The former was intensively studied in Irgens and Paulsen (2004); Liu and Ma (2009); Liang et al. (2011); Liang and Bayraktar (2014); Zhu et al. (2015); Brachetta and Ceci (2019) and references therein. The latter was investigated in these articles: in Zhang et al. (2007) and Meng and Zhang (2010), the authors proved the optimality of the excess-of-loss policy under the criterion of minimizing the ruin probability, with the surplus process described by a Brownian motion with drift; in Zhao et al. (2013) the Cramér-Lundberg model is used for the surplus process, with the possibility of investing in a financial market represented by the Heston model; in Sheng et al. (2014) and Li and Gu (2013) the risky asset is described by a Constant Elasticity of Variance (CEV) model, while the surplus is modelled by the Cramér-Lundberg model and its diffusion approximation, respectively; finally, in Li et al. (2018) the authors studied a robust optimal strategy under the diffusion approximation of the surplus process.
The common ground of the cited works is the underlying risk model, which is the Cramér-Lundberg model (or its diffusion approximation)1. In the actuarial literature it is of great importance, because it is simple enough to perform calculations. In fact, the claims arrival process is described by a Poisson process with constant intensity (or a Brownian motion, in the diffusion model). Nevertheless, as noticed by many authors (e.g., Grandell (1991); Hipp (2004)), it needs generalization in order to take into account the so called size fluctuations and risk fluctuations, i.e., variations of the number of policyholders and modifications of the underlying risk, respectively.
The main goal of our work is to extend the classical risk model by modelling the claims arrival process as a marked point process with dual-predictable projection affected by an exogenous stochastic process Y. More precisely, both the intensity of the claims arrival process and the claim size distribution are influenced by Y. Thanks to this environmental factor, we achieve a reasonably realistic description of any risk movement. For example, in automobile insurance Y may describe weather conditions, road conditions, traffic volume and so on. All these factors usually influence the accident probability as well as the damage size.
Some noteworthy attempts in that direction can be found in Liang and Bayraktar (2014) and Brachetta and Ceci (2019), where the authors studied the optimal proportional reinsurance. In the former, the authors considered a Markov-modulated compound Poisson process, with the (unobservable) stochastic factor described by a finite state Markov chain. In the latter, the stochastic factor follows a general diffusion. In addition, in Brachetta and Ceci (2019) the insurance and the reinsurance premia are not evaluated by premium calculation principles (see Young (2006)), because they are stochastic processes depending on Y. In our paper, we extend further the risk model, because the claim size distribution is influenced by the stochastic factor, which is described by a diffusion-type stochastic differential equation (SDE). In addition, we study a different reinsurance contract, which is the excess-of-loss agreement.
To the best of our knowledge stochastic risk factor models in insurance have not been considered so far. This is in contrast with financial literature where risky asset dynamics affected by exogenous stochastic factors have been largely considered, see for instance Ceci (2009); Ceci and Gerardi (2009, 2010); Zariphopoulou (2009) and Ceci (2012).
In our model the insurer is also allowed to lend or borrow money at a given interest rate r. During recent years, negative interest rates drew the attention of many authors. For example, since June 2016 the European Central Bank (ECB) fixed a negative Deposit facility rate, which is the interest banks receive for depositing money within the ECB overnight. Presently, it is . As a consequence, in our framework . We point out that there is no loss of generality due to the absence of a risky asset, because as long as the insurance and the financial markets are independent (which is a standard hypothesis in non-life insurance), the optimal reinsurance strategy turns out to depend only on the risk-free asset (see Brachetta and Ceci (2019) and references therein). As a consequence, the optimal investment strategy can be eventually obtained using existing results in the literature.
The paper is organized as follows: in Section 2, we formulate the model assumptions and describe the maximization problem; in Section 3 we derive the Hamilton-Jacobi-Bellman (HJB) equation; in Section 4, we investigate the candidate optimal strategy, which is suggested by the HJB derivation; in Section 5, we provide the verification argument with a probabilistic representation of the value function; finally, in Section 6 we perform some numerical simulations.
2. Model Formulation
Let be a complete probability space endowed with a filtration which satisfies the usual conditions, where is the insurer’s time horizon. We model the insurance losses through a marked point process with local characteristics influenced by an environment stochastic factor . Here, the sequence describes the claim arrival process and the corresponding claim sizes. Precisely, , , are stopping times such that a.s. and , , are -random variables such that , is -measurable.
The stochastic factor Y is defined as the unique strong solution to the following SDE:
where is a standard Brownian motion on . We assume that the following conditions hold true:
We will denote by the natural filtration generated by the process Y.
The random measure corresponding to the losses process is given by
where denotes the Dirac measure located at point . We assume that its -dual predictable projection has the form
where
- is such that , is a distribution function, with ;
- is a strictly positive measurable function.
In the sequel, we will assume the following integrability conditions:
and
According to the definition of dual predictable projection, for every nonnegative, -predictable and -indexed process we have that2
In particular, choosing with any nonnegative -predictable process
i.e., the claims arrival process is a point process with stochastic intensity .
Now we give the interpretation of as conditional distribution of the claim sizes3.
Proposition 1.
and the following equality holds:
where is the strict past of the σ-algebra generated by the stopping time :
Proof.
See Appendix A. □
This means that in our model both the claim arrival intensity and the claim size distribution are affected by the stochastic factor Y. This is a reasonable assumption; for example, in automobile insurance Y may describe weather, road conditions, traffic volume, and so on. For a detailed discussion of this topic see also Brachetta and Ceci (2019).
Remark 1.
Let us observe that for any -predictable and -indexed process such that
the process
turns out to be an -martingale. If in addition
then is a square integrable -martingale and
In this framework we define the cumulative claims up to time as follows
and the insurer’s reserve process is described by
where is the initial wealth and is a nonnegative -adapted process representing the gross insurance risk premium. In the sequel we assume , for a suitable function such that . Let us notice that Equation (7) implies that
Now we allow the insurer to buy an excess-of-loss reinsurance contract. By means of this agreement, the insurer chooses a retention level and for any future claim the reinsurer is responsible for all the amount which exceeds that threshold (e.g., means full reinsurance). For any dynamic reinsurance strategy , the insurer’s surplus process is given by
where is a nonnegative -adapted process representing the reinsurance premium rate. In addition, we suppose that the following assumption holds true.
Assumption 1.
(Excess-of-loss reinsurance premium) Let us assume that for any reinsurance strategy the corresponding reinsurance premium process admits the following representation:
where is a continuous function in α, with continuous partial derivatives in , such that
- 1.
- for all , since the premium is increasing with respect to the protection level;
- 2.
- , because the cedant is not allowed to gain a profit without risk.
In the rest of the paper, should be intended as a right derivative. Moreover, we assume that
Assumption 1 formalizes the minimal requirements for a process to be a reinsurance premium. In the next examples we briefly recall the most famous premium calculation principles, because they are widely used in optimal reinsurance problems solving. In Appendix B the reader can find a rigorous derivation of the formulas (10) and (11) below.
Example 1.
The most famous premium calculation principle is the expected value principle (abbr. EVP)5. The underlying conjecture is that the reinsurer evaluates her premium in order to cover the expected losses plus a load which depends on the expected losses. In our framework, under the EVP the reinsurance premium is given by the following expression:
for some safety loading .
Example 2.
Another important premium calculation principle is the variance premium principle (abbr. VP). In this case, the reinsurer’s loading is proportional to the variance of the losses. More formally, the reinsurance premium admits the following representation:
for some safety loading .
Furthermore, the insurer can lend or borrow money at a fixed interest rate . More precisely, every time the surplus is positive, the insurer lends it and earns interest income if (or pays interest expense if ); on the contrary, when the surplus becomes negative, the insurer borrows money and pays interest expense (or gains interest income if ).
Under these assumptions, the total wealth dynamic associated with a given strategy is described by the following SDE:
It can be verified that the solution to (12) is given by the following expression:
Remark 2.
Let us define
We have that
Our aim is to find the optimal strategy in order to maximize the expected exponential utility of the terminal wealth, that is
where is the risk-aversion parameter and is the set of all admissible strategies as defined below.
Definition 1.
We denote by the set of all admissible strategies, that is the class of all nonnegative -predictable processes . With the notation we refer to the same class, restricted to the strategies starting from .
Remark 3.
We need additional integrability conditions in order to ensure that under (full reinsurance) and (null reinsurance) the expected utility is finite. Precisely, under condition
we get that
and under
with K given in (14), we have that
In the next proposition we give a sufficient condition for Equation (17).
Proposition 2.
Proof.
Since is a pure-jump process, we have that
Taking the expectation, by Equation (8) we get that
Applying Gronwall’s lemma we obtain that
□
As usual in stochastic control problems, we focus on the corresponding dynamic problem:
where denotes the insurer’s wealth process starting from evaluated at time T.
3. HJB Formulation
In order to solve the optimization problem (19), we introduce the value function associated with it, that is
This function, if sufficiently regular, is expected to solve the Hamilton-Jacobi-Bellman (HJB) equation:
where denotes the Markov generator of the couple associated with a constant control . In what follows, we denote by the class of all bounded functions , with , with bounded first order derivatives and bounded second order derivatives with respect to the spatial variables .
Lemma 1.
Let be a function in . The Markov generator of the stochastic process for all constant strategies is given by the following expression:
Proof.
For any , applying Itô’s formula to the stochastic process , we get the following expression:
where is defined in (22) and
Remark 4.
Since the couple is a Markov process, any Markovian control is of the form , where denotes a suitable function. The generator associated with a general Markovian strategy can be easily obtained by replacing α with in (22).
In order to simplify our optimization problem, we present a preliminary result.
Remark 5.
Let be an integrable function such that . For any , the following equation holds true:
where . In fact, by integration by parts we get that
Now let us consider the ansatz , which is motivated by the following proposition.
Proposition 3.
Let us suppose that there exists a function solution to the following Cauchy problem:
with final condition , , where
Proof.
From the expression (26) we can easily verify that
By Remark 5, taking , we can rewrite the last integral in this more convenient way:
Now we define by means of the Equation (25), obtaining the following equivalent expression:
The previous result suggests to focus on the minimization of the function (25), that is the aim of the next section.
4. Optimal Reinsurance Strategy
In this section, we study the following minimization problem:
where is defined in (25).
In particular, we provide a complete characterization of the optimal reinsurance strategy. In the sequel we assume .
Proposition 4.
Let us suppose that is strictly convex in and let us define the set as follows:
If the equation
admits at least one solution in for any , denoted by , then the minimization problem (27) admits a unique solution given by
Proof.
The function is continuous in by definition (see Assumption 1) and for any its derivative is given by the following expression:
Since is convex in by hypothesis, if then , and , because the derivative is increasing in and there is no stationary point in . Else, if then , and coincides with the unique stationary point of , which is . Let us notice that it exists by hypothesis and it is unique because is strictly convex. □
By the previous proposition, we observe that is an important threshold for the insurer: as long as the marginal cost of the full reinsurance falls in the interval , the optimal choice is full reinsurance.
Unfortunately, it is not always easy to check whether is strictly convex in or not. In the next result such an hypothesis is relaxed, while the uniqueness of the solution to (29) is required.
Proposition 5.
Suppose that Equation (29) admits a unique solution for any . Moreover, let us assume that
Proof.
Recalling the proof of Proposition 4, if then and . For any , by hypothesis there exists a unique stationary point . By simple calculations, using (32) we notice that
hence is the unique minimizer and this completes the proof. □
The next result deals with the existence of a solution to (29). In particular, it is sufficient to require that the claim size distribution is heavy-tailed, which is a relevant case in non-life insurance (see Rolski et al. (1999), chp. 2), plus a technical condition for the reinsurance premium.
Proposition 6.
Let us assume that the reinsurance premium is such that6
and the claim size distribution is heavy-tailed in this sense:
Then, for any , the Equation (29) admits at least one solution in .
Proof.
The following property of heavy-tailed distributions is a well known implication of our assumption:
Hence, by Equation (31), for any
On the other hand, we know that
As a consequence, being continuous in , there exists such that . □
Now we turn the attention to the other crucial hypothesis of Proposition 4, which is the convexity of . The reader can easily observe that the reinsurance premium convexity plays a central role.
Proposition 7.
Suppose that the reinsurance premium is convex in and for some function such that . Then the function defined in (25) is strictly convex in .
Proof.
Recalling the expression (25), it is sufficient to prove the convexity of the following term:
For this purpose, let us evaluate its second order derivative:
Now the term in brackets is
The proof is complete. □
By Proposition 1, the hypothesis on the claim sizes distribution above may be read as assuming that the claims are exponentially distributed conditionally to Y.
4.1. Expected Value Principle
Now we investigate the special case of the expected value principle introduced in Example 1.
Proposition 8.
Under the EVP (see Equation (10)), the optimal reinsurance strategy is given by
Proof.
Using Remark 5, we can rewrite the Equation (10) as follows:
As a consequence, we have that
For , we have that
hence and by Proposition 4 the minimizer belongs to . Now we look for the stationary points, i.e., the solutions to the Equation (29), that in this case reads as follows:
Solving this equation, we obtain the unique solution given by (33). In order to prove that it coincides with the unique minimizer to (27), it is sufficient to show that
For this purpose, observe that
The proof is complete. □
Remark 6.
Formula (33) was found by Zhao et al. (2013) (see eq. 3.31, p. 508). We point out that it is a completely deterministic strategy. This fact is crucially related to the use of the EVP rather than the underlying model; in fact, in Zhao et al. (2013) the authors considered the Cramér-Lundberg model under the EVP7.
From the economic point of view, by Equation (33) it is easy to show that the optimal retention level is decreasing with respect to the interest rate and the risk-aversion; on the contrary, it is increasing with respect to the reinsurer’s safety loading. In addition, the sensitivity with respect to the time-to-maturity depends on the sign of r.
Another relevant aspect of (33) is that it is independent of the claim size distribution. To the authors this result seems quite unrealistic. In fact, any subscriber of an excess-of-loss contract is strongly worried about possibly extreme events, hence the claims distribution is expected to play an important role.
4.2. Variance Premium Principle
This subsection is devoted to derive an optimal strategy under the variance premium principle (see Example 2).
Proposition 9.
Let us suppose that is strictly convex in and
for some (eventually ).
Under the VP (see Equation (11)) the optimal reinsurance strategy is the unique solution to the following equation:
Proof.
The proof is based on Proposition (4). By Equation (11) we get its derivative:
It is clear that the set defined in (28) is empty, because for any
Hence the minimizer should coincide with the unique stationary point of , i.e., the solution to (36). In order to prove it, we need to ensure the existence of a solution to (36). For this purpose, we notice that on the one hand
On the other hand, for , by (35) we get
As a consequence, by the continuity of there exists a point such that . Such a solution is unique because is strictly convex by hypothesis. □
Conversely to Proposition 8, the optimal retention level given in Proposition 9 is still dependent on the stochastic factor Y. Such a dependence is spread through the claim size distribution.
Remark 7.
We observe that any heavy-tailed distribution (see the proof of Proposition 6) satisfies the condition (35) with .
Now we specialize the variance premium principle to conditionally exponentially distributed claims.
Proposition 10.
Under the VP, suppose that for some function such that . The optimal reinsurance strategy is given by
Proof.
By the proof of Proposition 9, we know that under VP . Now, under our hypotheses, by Equation (31) we readily get
The equation admits a unique solution, given by Equation (37). At this point , the function is strictly convex, because
It follows that is the unique minimizer by Proposition 30. □
Contrary to Equation (33), the explicit formula (37) keeps the dependence on the stochastic factor Y. In addition, the following result holds true.
Remark 8.
Suppose that for some function such that . We consider two different reinsurance safety loadings , referring to the EVP and VP, respectively. Moreover, let us denote by and the optimal retention level under the EVP and VP, given in Equations (33) and (37), respectively. It is easy to show that
From the practical point of view, as long as the stochastic factor fluctuations result in a rate parameter higher than the threshold , the optimal retention level evaluated through the expected value principle turns out to be larger than the variance principle.
5. Verification Theorem
Theorem 1 (Verification Theorem).
Proof.
By Proposition 3, the function defined in Equation (26) solves the HJB problem (21). Hence for any
where and denote the solutions to (12) and (1) at time , starting from and , respectively.
From Itô’s formula we get
with defined by
In order to show that is an -local-martingale, we use a localization argument, taking
The reader can easily check that is a non decreasing sequence of stopping time such that (see Equations (15) and (3)). For the diffusion term of , using the assumptions (38) and (2), we notice that
where is a constant depending on n. For the jump term, by the condition (18) and Remark 1, we get
with denoting a positive constant dependent on n. Thus turns out to be an -local-martingale and is a localizing sequence for it. Now, taking the conditional expectation of (39) with in place of T, we obtain that
Let us notice that
where is a constant. As a consequence, is a sequence of uniformly integrable random variables. By classical results in probability theory, it converges almost surely. Using the monotonicity and the boundedness of , together with the non explosion of and (see (15) and (3)), taking the limit for we conclude that
As a byproduct, since given in Proposition 4 realizes the infimum in (27), we have that and, replicating the calculations above, we obtain the equality
i.e., is an optimal control. □
By Theorem 1, the value function (20) can be characterized as a transformation of the solution to the partial differential equation (PDE) (24). Nevertheless, an explicit expression is not available, except for very special cases. The following result provides a probabilistic representation by means of the Feynman-Kac theorem.
Proposition 11.
Proof.
The thesis immediately follows by Theorem 1 and the Feynman-Kac representation of . □
Remark 9.
We refer to Heath and Schweizer (2000) for existence and uniqueness of a solution to the PDE (24).
6. Numerical Results
In this section, we show some numerical results, mostly based on Propositions 8 and 10. We assumed the following dynamic of the stochastic factor Y for performing simulations:
The -dual predictable projection (see Equation (5)) is determined by these functions:
The parameters are set according to Table 1 below.
The SDEs are approximated through a classical Euler’s scheme with steps length , while the expectations are evaluated by means of Monte Carlo simulations with parameter M.
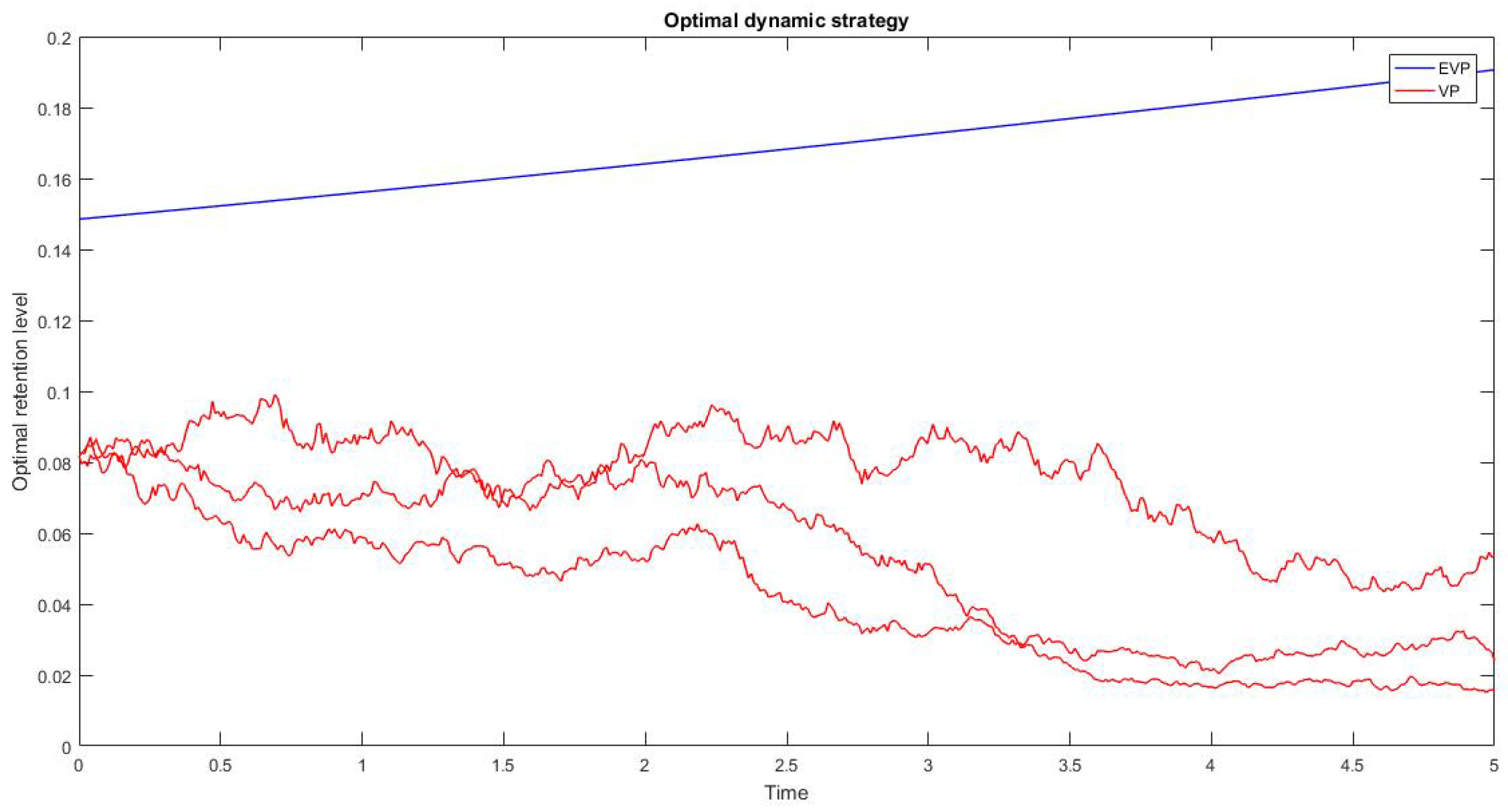
In Figure 1 we show the dynamic strategies under EVP and VP, computed by the Equations (33) and (37), respectively.
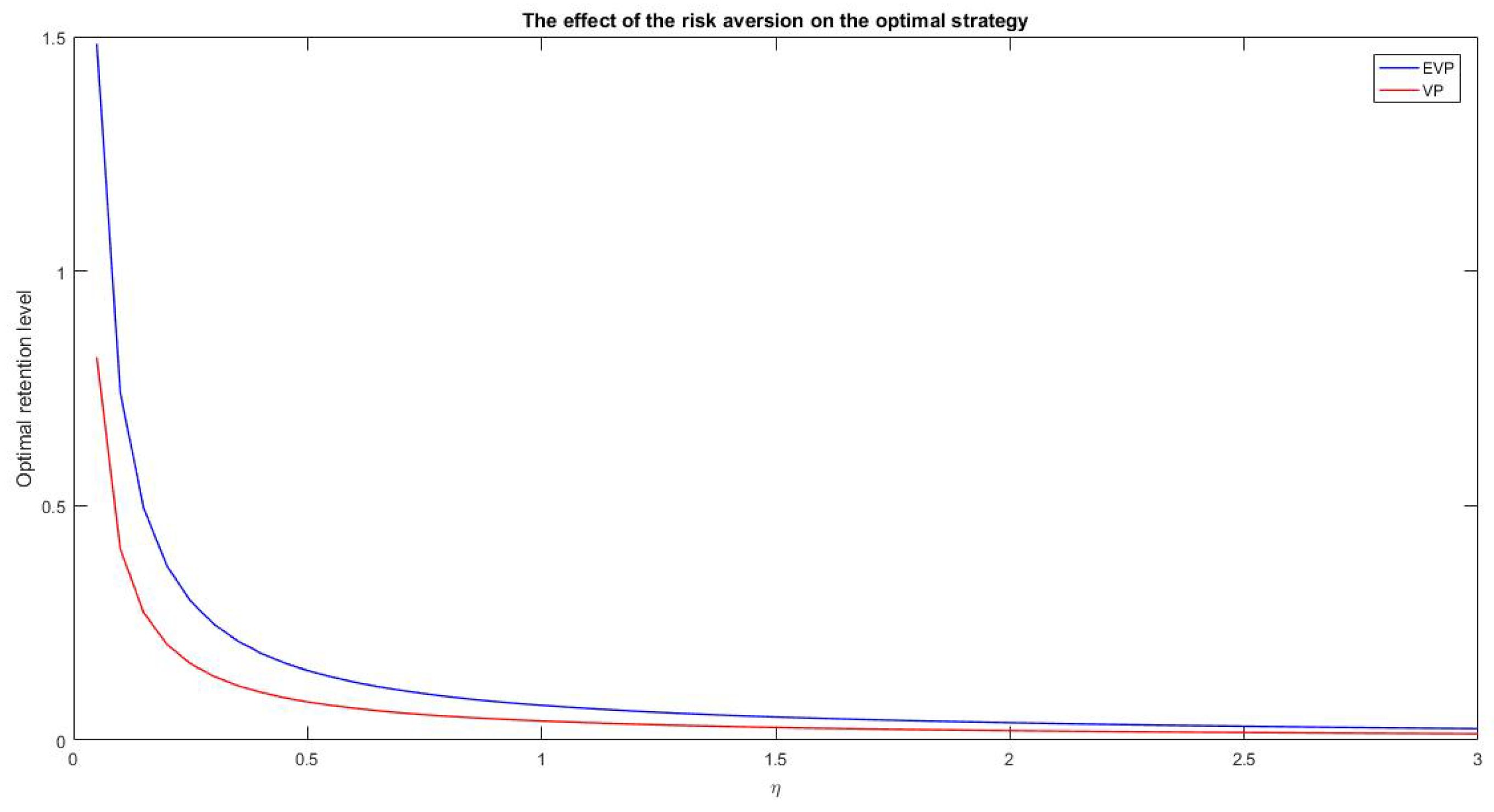
In Figure 2 we start the sensitivity analysis investigating the effect of the risk aversion parameter on the optimal strategy at time . As expected, there is an inverse relationship. Notice that for high values of the two strategies tend to the same level.
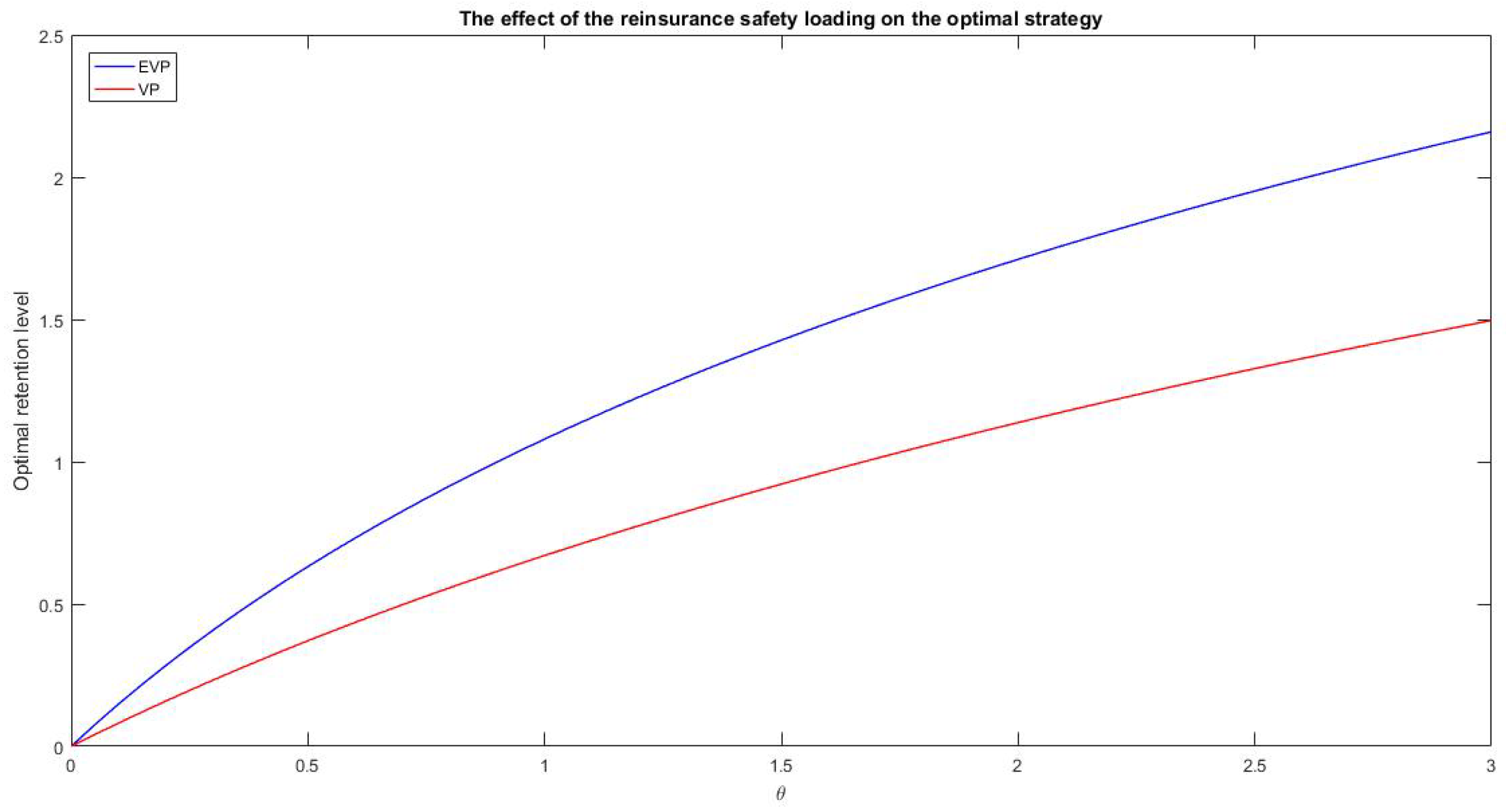
Figure 3 refers to the sensitivity analysis with respect to the reinsurance safety loading . When the strategies coincide (because the premia coincide), then they diverge for increasing values of .
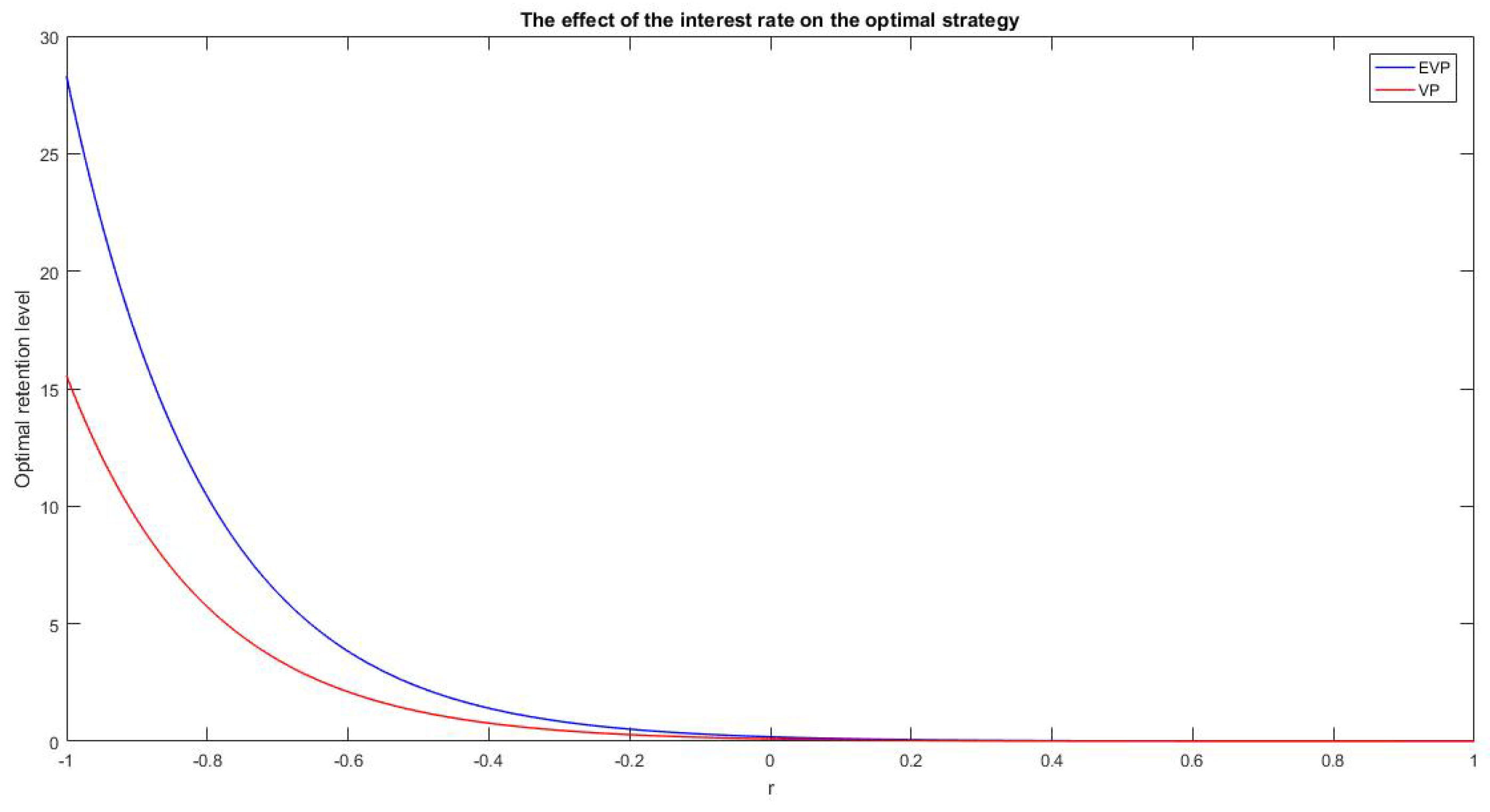
In Figure 4 we observe that the distance between the retention levels in the two cases is larger when and it decreases as long as r increases. Nevertheless, even for positive values of the risk-free interest rate the distance is not negligible (see the pictures above, with ).
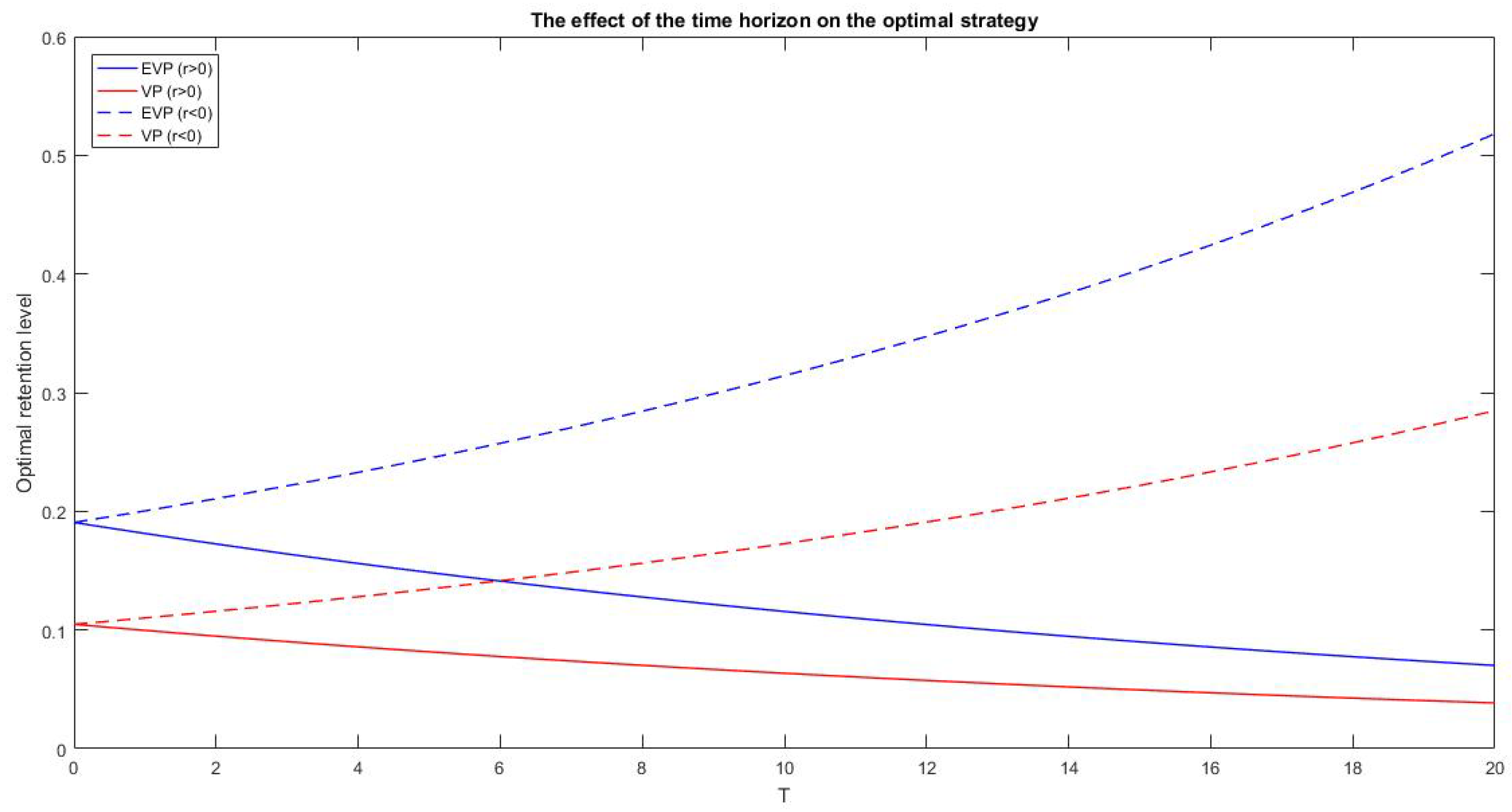
In Figure 5 we study the response of the optimal strategy to variations of the time horizon. The two cases exhibit the same behavior, which is strongly influenced by the sign of the interest rate. In fact, if the retention level increases with the time horizon, while if the optimal strategy decreases with T.
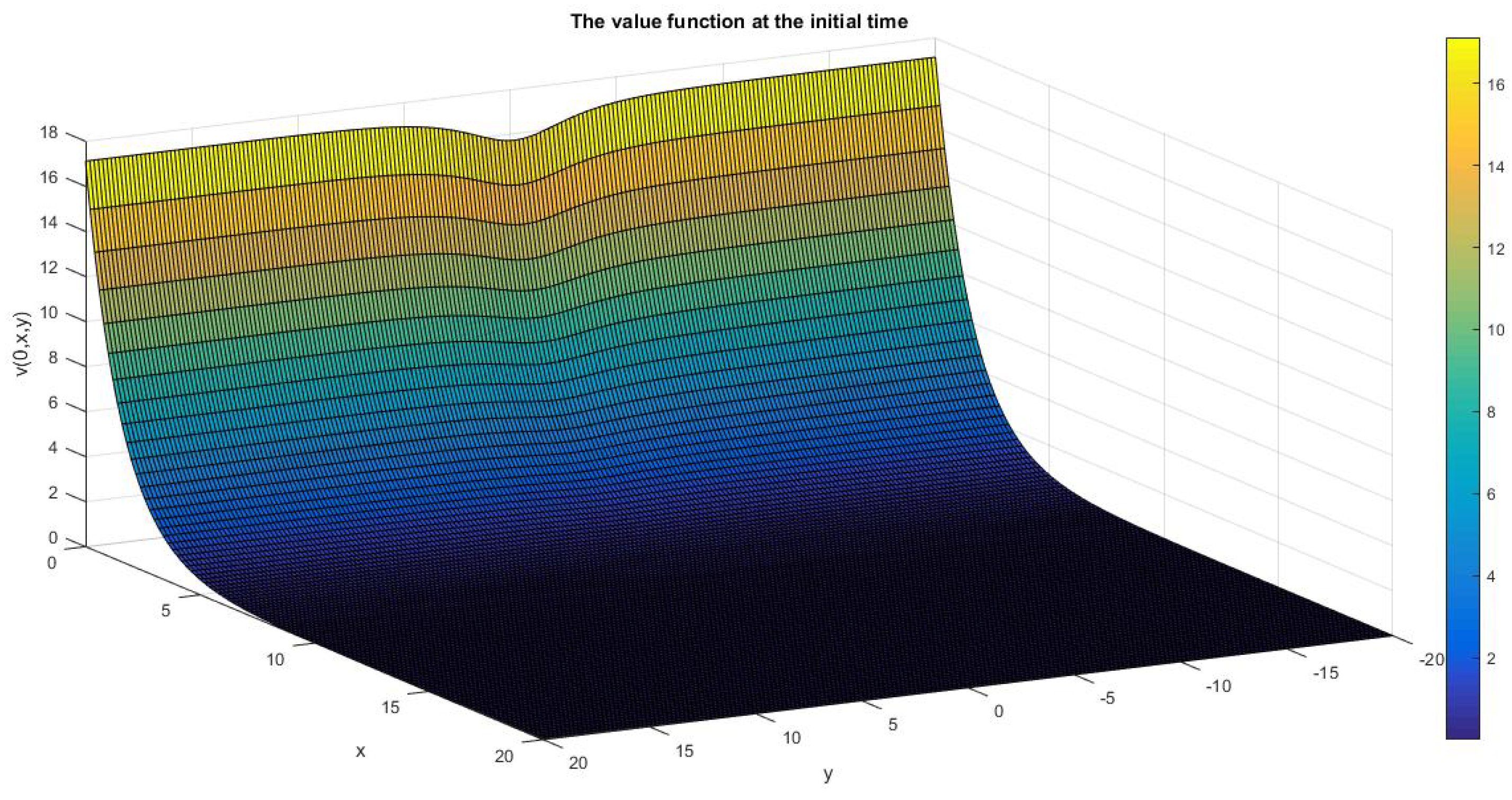
Finally, thanks to Proposition 11 we are able to numerically approximate the value function by simulating the trajectories of Y. The graphical result (under VP) is shown in Figure 6 below.
Author Contributions
The authors contributed equally to the work.
Funding
This research received no external funding.
Acknowledgments
The authors are grateful to both the anonymous reviewers for their interesting comments and important suggestions. The authors are members of the Gruppo Nazionale per l’Analisi Matematica, la Probabilità e le loro Applicazioni (GNAMPA) of the Istituto Nazionale di Alta Matematica (INdAM).
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CEV | Constant Elasticity of Variance |
| SDE | Stochastic Differential Equation |
| ECB | European Central Bank |
| HJB | Hamilton-Jacobi-Bellman |
| EVP | Expected value principle |
| VP | Variance premium principle |
| PDE | Partial Differential Equation |
Appendix A
Proof of Proposition 1.
Let us consider , with any nonnegative -predictable process and . By Equation (8) we get
By Equation (9) we can rewrite this quantity as follows:
with the notation .
On the other hand, since is an -measurable random variable (see Appendix 2, T4 in Brémaud (1981)), we have that
Hence
By the arbitrariness of we deduce the thesis for . Now let us choose . Equation (A1) becomes
In view of the preceding equation, we obtain the desired equality for . Repeating the same argument for we complete the thesis. □
Appendix B
In this section we motivate formulas (10) and (11). Let us denote by the reinsurer’s cumulative losses at time t:
Recalling (5), by Equation (10) in Example 1 we readily check that for any strategy under the EVP
for some safety loading , i.e., for any time the expected premium covers the expected losses plus an additional (proportional) term, which is the expected net income.
Now let us focus on Example 2. Under the VP the reinsurance premium should satisfy the following equation:
for some safety loading . We need to evaluate the variance term. Let us introduce the following stochastic process:
denoting . We have that
Denoting by the predictable covariance process of , using Remark 1 we finally obtain
Under the special case and (e.g., under the Cramér-Lundberg model), for any constant strategy the previous equation reduces to
Extending this formula to the model formulated in Section 2, we obtain the expression (11). Of course, there will be an approximation error, because in our general model the intensity and the claim size distribution depend on the stochastic factor. Nevertheless, this is a common procedure in the actuarial literature.
References
- Bass, Richard F. 2004. Stochastic differential equations with jumps. Probability Surveys 1: 1–19. [Google Scholar] [CrossRef]
- Brachetta, Matteo, and Claudia Ceci. 2019. Optimal proportional reinsurance and investment for stochastic factor models. Insurance: Mathematics and Economics 87: 15–33. [Google Scholar] [CrossRef]
- Brémaud, Pierre. 1981. Point Processes and Queues. Martingale Dynamics. Berlin and Heidelberg: Springer. [Google Scholar]
- Ceci, Claudia. 2009. An HJB approach to exponential utility maximisation for jump processes. International Journal of Risk Assessment and Management 11: 104–21. [Google Scholar] [CrossRef]
- Ceci, Claudia. 2012. Utility maximization with intermediate consumption under restricted information for jump market models. International Journal of Theoretical and Applied Finance (IJTAF) 15: 1–34. [Google Scholar] [CrossRef]
- Ceci, Claudia, and Anna Gerardi. 2006. A model for high frequency data under partial information: A filtering approach. International Journal of Theoretical and applied Finance 9: 555–76. [Google Scholar] [CrossRef]
- Ceci, Claudia, and Anna Gerardi. 2009. Utility-based hedging and pricing with a nontraded asset for jump processes. Nonlinear Analysis: Theory, Methods & Applications 71: e1953–69. [Google Scholar]
- Ceci, Claudia, and Anna Gerardi. 2010. Wealth optimization and dual problems for jump stock dynamics with stochastic factor. Stochastics: An International Journal of Probability and Stochastic Processes 82: 403–25. [Google Scholar] [CrossRef]
- Grandell, Jan. 1991. Aspects of Risk Theory. Berlin and Heidelberg: Springer. [Google Scholar]
- Heath, David, and Martin Schweizer. 2000. Martingales versus pdes in finance: An equivalence result with examples. Journal of Applied Probability 37: 947–57. [Google Scholar] [CrossRef]
- Hipp, Christian. 2004. Stochastic control with applications in insurance. In Stochastic Methods in Finance. Berlin and Heidelberg: Springer, chp. 3. pp. 127–64. [Google Scholar]
- Irgens, Christian, and Jostein Paulsen. 2004. Optimal control of risk exposure, reinsurance and investments for insurance portfolios. Insurance: Mathematics and Economics 35: 21–51. [Google Scholar] [CrossRef]
- Li, Danping, Yan Zeng, and Hailiang Yang. 2018. Robust optimal excess-of-loss reinsurance and investment strategy for an insurer in a model with jumps. Scandinavian Actuarial Journal 2: 145–71. [Google Scholar] [CrossRef]
- Li, Qicai, and Mengdi Gu. 2013. Optimization problems of excess-of-loss reinsurance and investment under the cev model. ISRN Mathematical Analysis 2013: 383265. [Google Scholar] [CrossRef]
- Liang, Zhibin, and Erhan Bayraktar. 2014. Optimal reinsurance and investment with unobservable claim size and intensity. Insurance: Mathematics and Economics 55: 156–66. [Google Scholar] [CrossRef]
- Liang, Zhibin, Kam Chuen Yuen, and Junyi Guo. 2011. Optimal proportional reinsurance and investment in a stock market with ornstein–uhlenbeck process. Insurance: Mathematics and Economics 49: 207–15. [Google Scholar] [CrossRef]
- Liu, Yuping, and Jin Ma. 2009. Optimal reinsurance/investment problems for general insurance models. The Annals of Applied Probability 19: 1495–528. [Google Scholar] [CrossRef]
- Lundberg, Fillip. 1903. Approximerad Framställning av Sannolikehetsfunktionen, Terförsäkering av Kollektivrisker. Ph.D. Dissertation, Almqvist and Wiksell, Uppsala, Sweden. [Google Scholar]
- Meng, Hui, and Xin Zhang. 2010. Optimal risk control for the excess of loss reinsurance policies. ASTIN Bulletin 40: 179–97. [Google Scholar] [CrossRef]
- Rolski, Tomasz, Hanspeter Schmidli, Volker Schmidt, and Jozef L. Teugels. 1999. Stochastic Processes for Insurance and Finance. Hoboken: Wiley. [Google Scholar]
- Schmidli, Hanspeter. 2018. Risk Theory. Springer Actuarial. Cham: Springer International Publishing. [Google Scholar]
- Sheng, De-Lei, Ximin Rong, and Hui Zhao. 2014. Optimal control of investment-reinsurance problem for an insurer with jump-diffusion risk process: Independence of brownian motions. Abstract and Applied Analysis 2014: 194962. [Google Scholar] [CrossRef]
- Young, Virginia R. 2006. Premium principles. In Encyclopedia of Actuarial Science. Atlanta: American Cancer Society, vol. 3. [Google Scholar]
- Zariphopoulou, Thaleia. 2009. Optimal asset allocation in a stochastic factor model—An overview and open problems. In Advanced Financial Modelling, Radon Series in Computational and Applied Mathematics. Berlin: De Gruyter, vol. 8, pp. 427–53. [Google Scholar]
- Zhang, Xin, Ming Zhou, and Junyi Guo. 2007. Optimal combinational quota-share and excess-of-loss reinsurance policies in a dynamic setting. Applied Stochastic Models in Business and Industry 23: 63–71. [Google Scholar] [CrossRef]
- Zhao, Hui, Ximin Rong, and Yonggan Zhao. 2013. Optimal excess-of-loss reinsurance and investment problem for an insurer with jump–diffusion risk process under the heston model. Insurance: Mathematics and Economics 53: 504–14. [Google Scholar] [CrossRef]
- Zhu, Huiming, Chao Deng, Shengjie Yue, and Yingchun Deng. 2015. Optimal reinsurance and investment problem for an insurer with counterparty risk. Insurance: Mathematics and Economics 61: 242–54. [Google Scholar] [CrossRef]
| 1 | |
| 2 | |
| 3 | This result is an extension of Proposition 2.4 in Ceci and Gerardi (2006). |
| 4 | |
| 5 | |
| 6 | E.g., if q is convex in . |
| 7 | It is not surprising, in fact in Brachetta and Ceci (2019) and references therein also the optimal proportional reinsurance under EVP turns out to be deterministic. |
Figure 1.
The dynamics of the optimal strategies under EVP (red) and VP (blue).

Figure 2.
The effect of the risk aversion on the optimal strategy under EVP (red) and VP (blue).

Figure 3.
The effect of the reinsurer’s safety loading on the optimal strategy under EVP (red) and VP (blue).
Figure 3.
The effect of the reinsurer’s safety loading on the optimal strategy under EVP (red) and VP (blue).

Figure 4.
The effect of the risk-free interest rate on the optimal strategy under EVP (red) and VP (blue).
Figure 4.
The effect of the risk-free interest rate on the optimal strategy under EVP (red) and VP (blue).

Figure 5.
The effect of the time horizon on the optimal strategy under EVP (red) and VP (blue).

Figure 6.
The value function at the initial time.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Simulation parameters.
| Parameter | Value |
|---|---|
| c | 1 |
| T | 5 Y |
| r | |
| N | 500 |
| M | 5000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Brachetta, M.; Ceci, C. Optimal Excess-of-Loss Reinsurance for Stochastic Factor Risk Models. Risks 2019, 7, 48. https://0-doi-org.brum.beds.ac.uk/10.3390/risks7020048
AMA Style
Brachetta M, Ceci C. Optimal Excess-of-Loss Reinsurance for Stochastic Factor Risk Models. Risks. 2019; 7(2):48. https://0-doi-org.brum.beds.ac.uk/10.3390/risks7020048
Chicago/Turabian StyleBrachetta, Matteo, and Claudia Ceci. 2019. "Optimal Excess-of-Loss Reinsurance for Stochastic Factor Risk Models" Risks 7, no. 2: 48. https://0-doi-org.brum.beds.ac.uk/10.3390/risks7020048
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.