
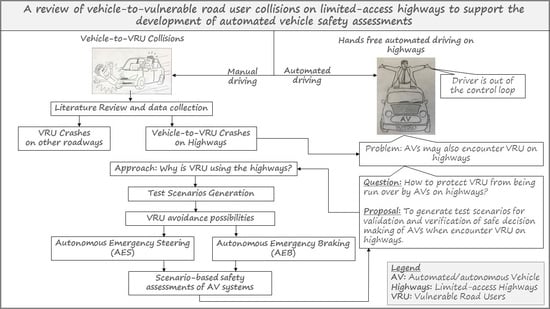
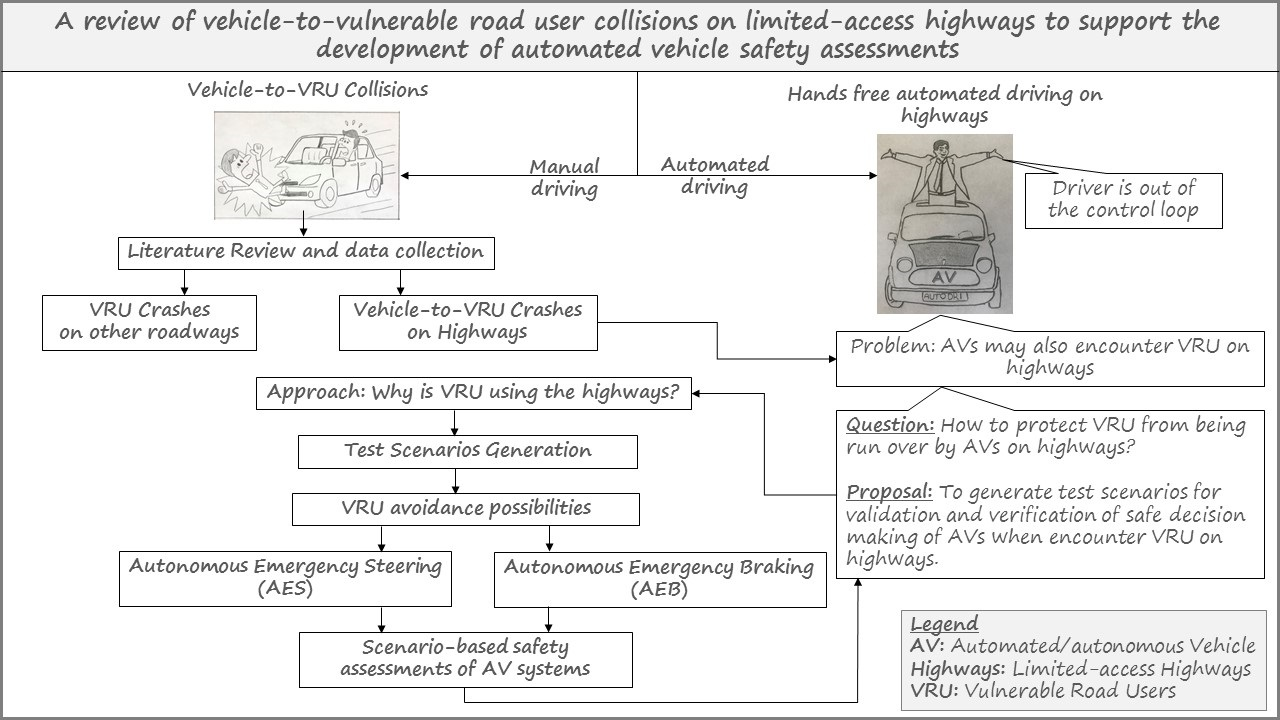
A Review of Vehicle-to-Vulnerable Road User Collisions on Limited-Access Highways to Support the Development of Automated Vehicle Safety Assessments


Abstract
:
1. Introduction
2. Method
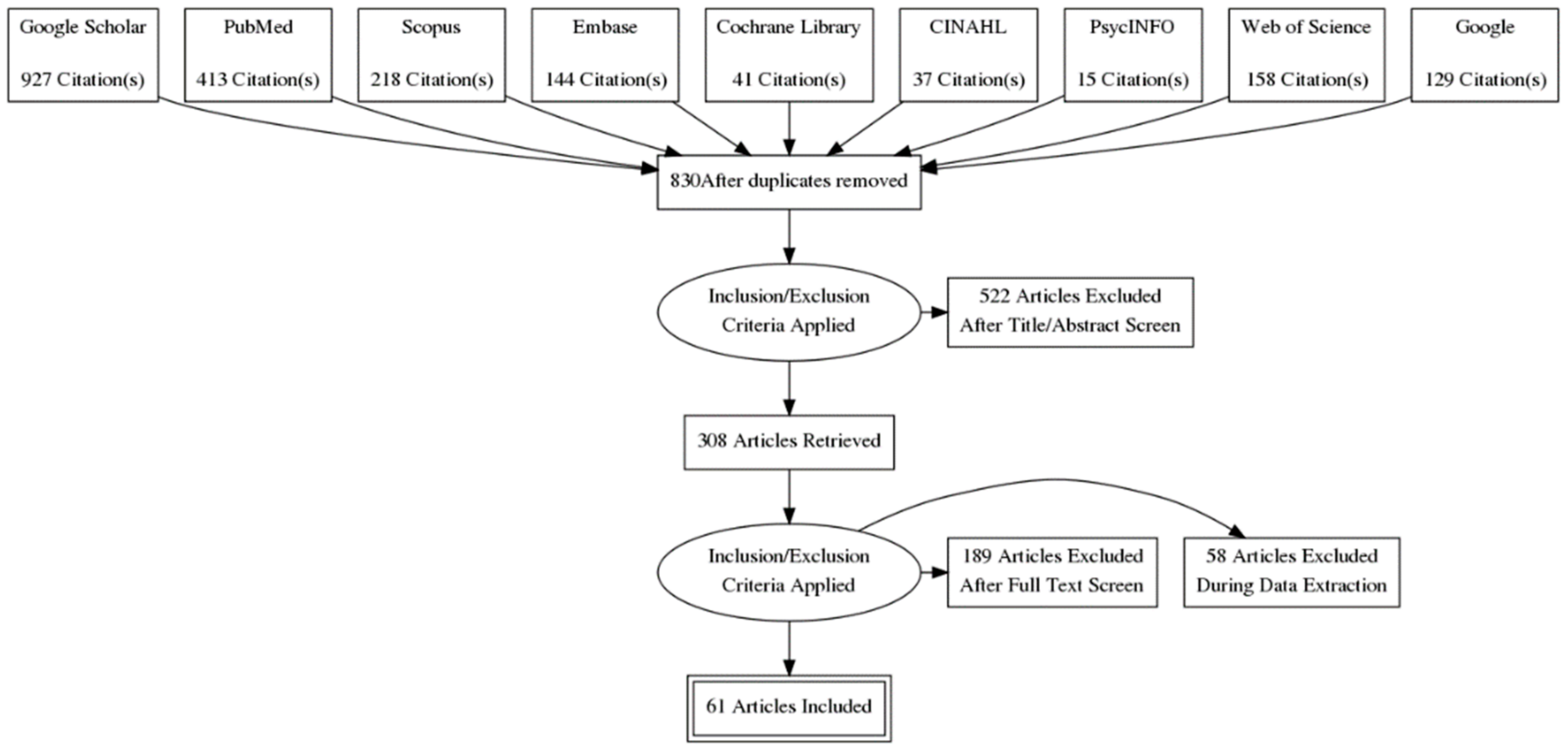
2.1. Study Approach
2.2. Definition of Vulnerable Road Users (VRU)
2.3. Definition of Limited Access Highways
3. Results
3.1. Occupants Alighting from a Disabled Vehicle
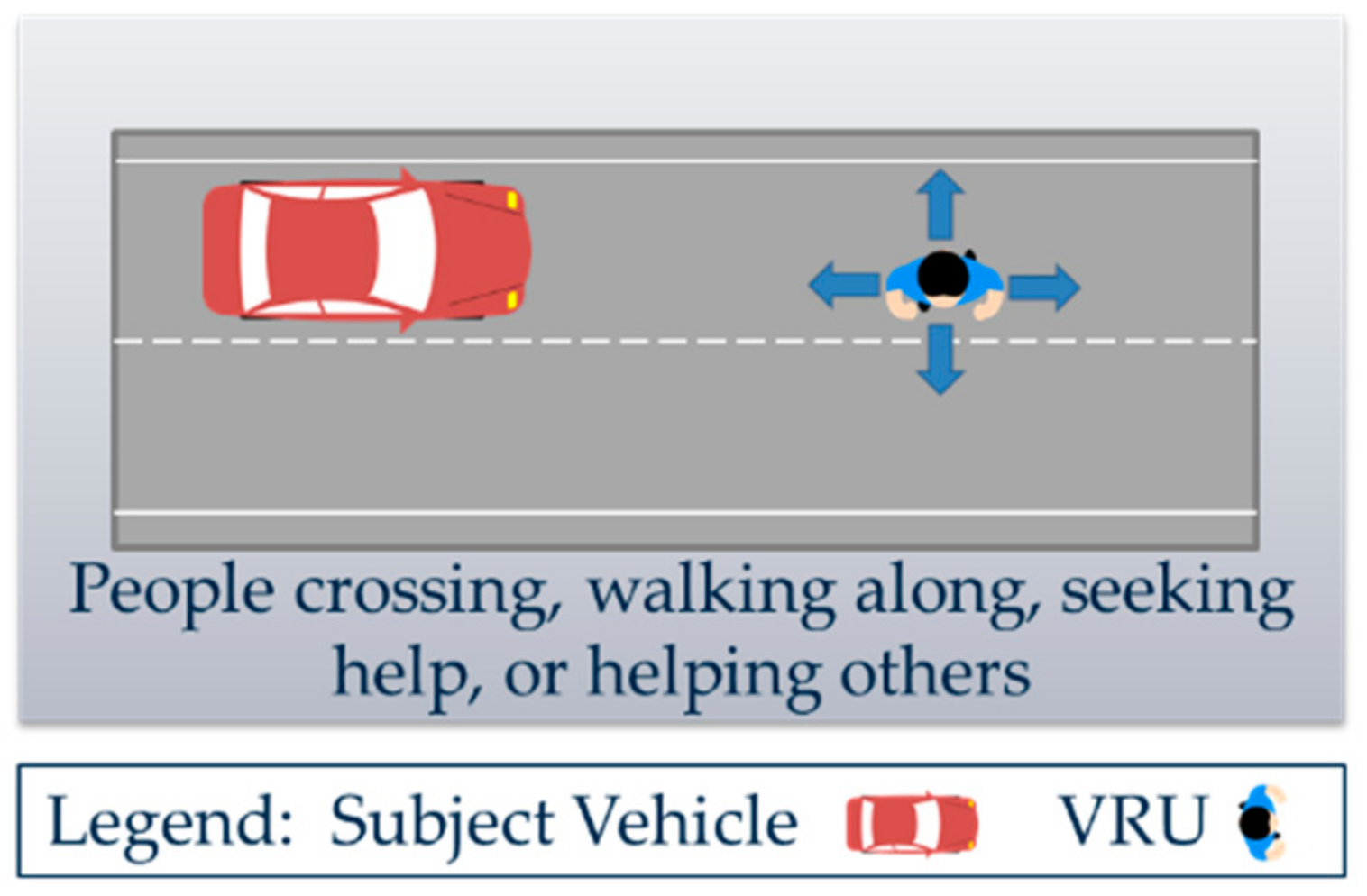
3.2. People Walking across or along a Highway
3.3. People Seeking Help or Helping Others
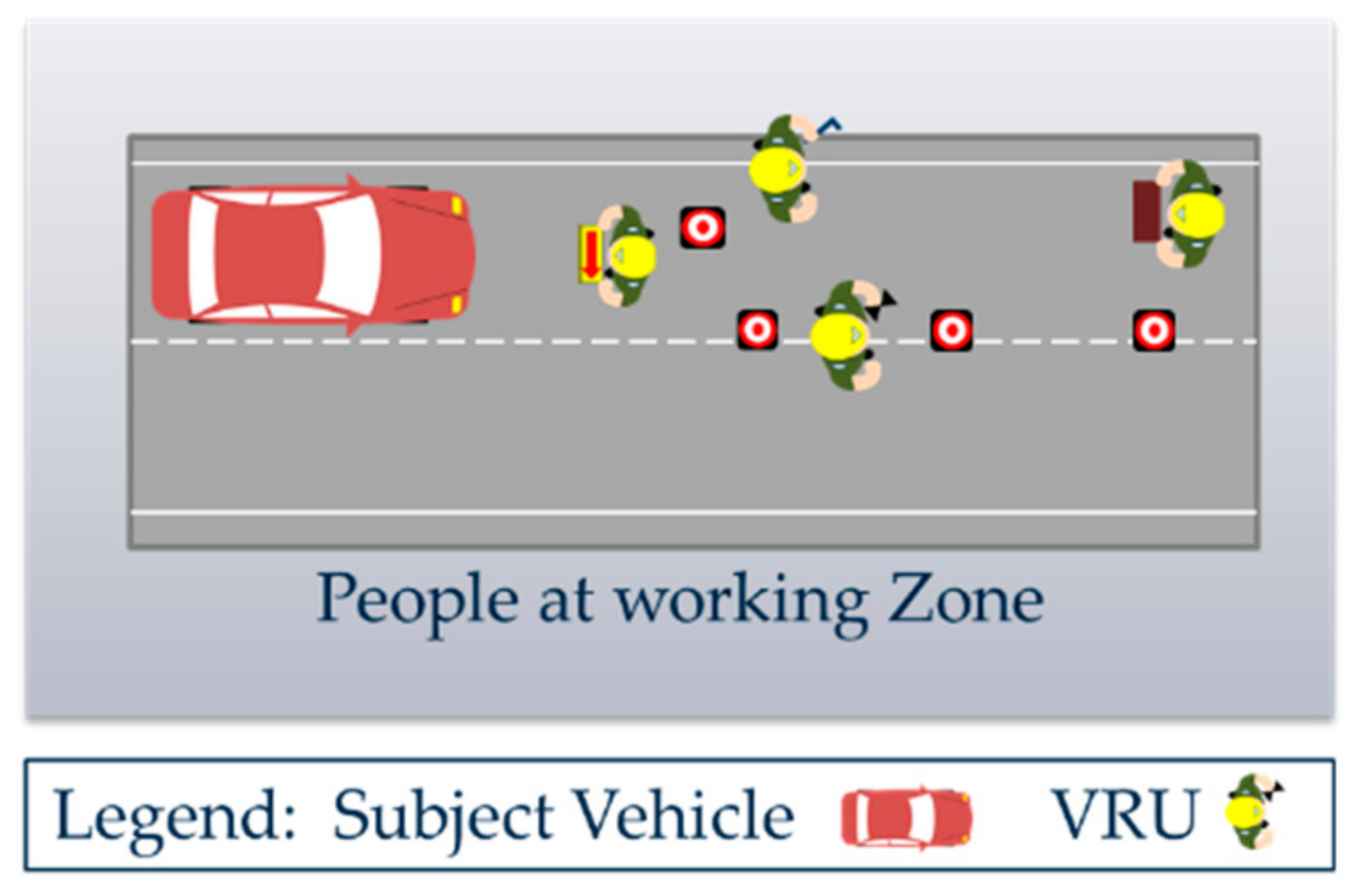
3.4. People in Working Zones
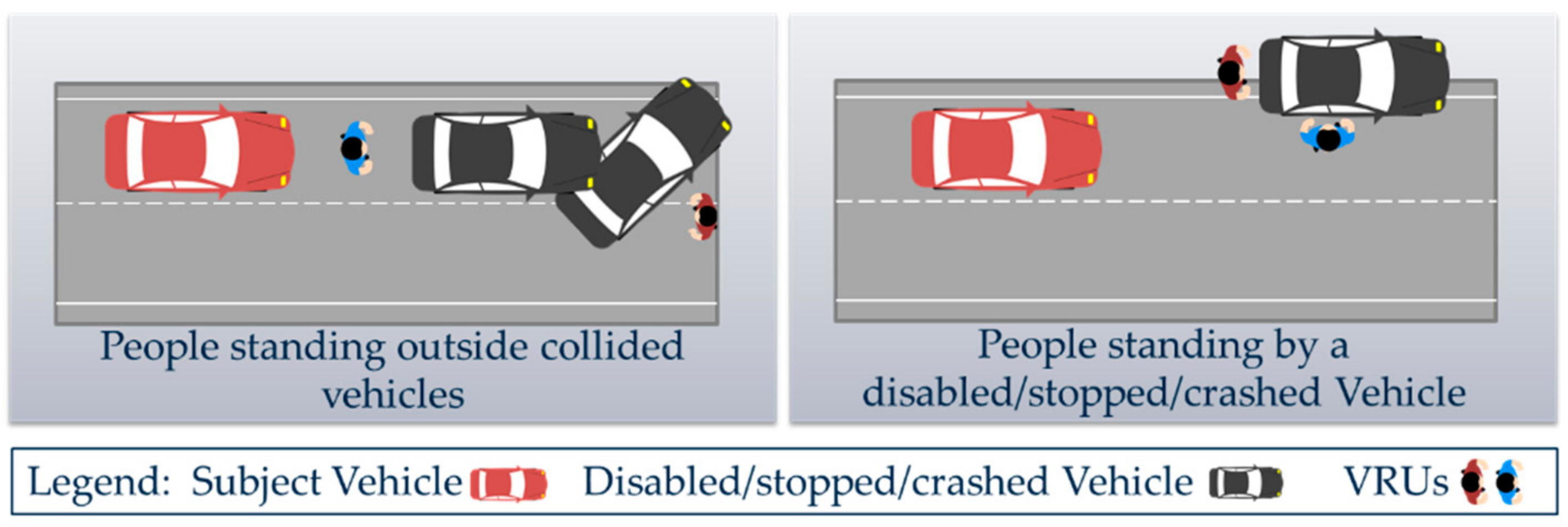
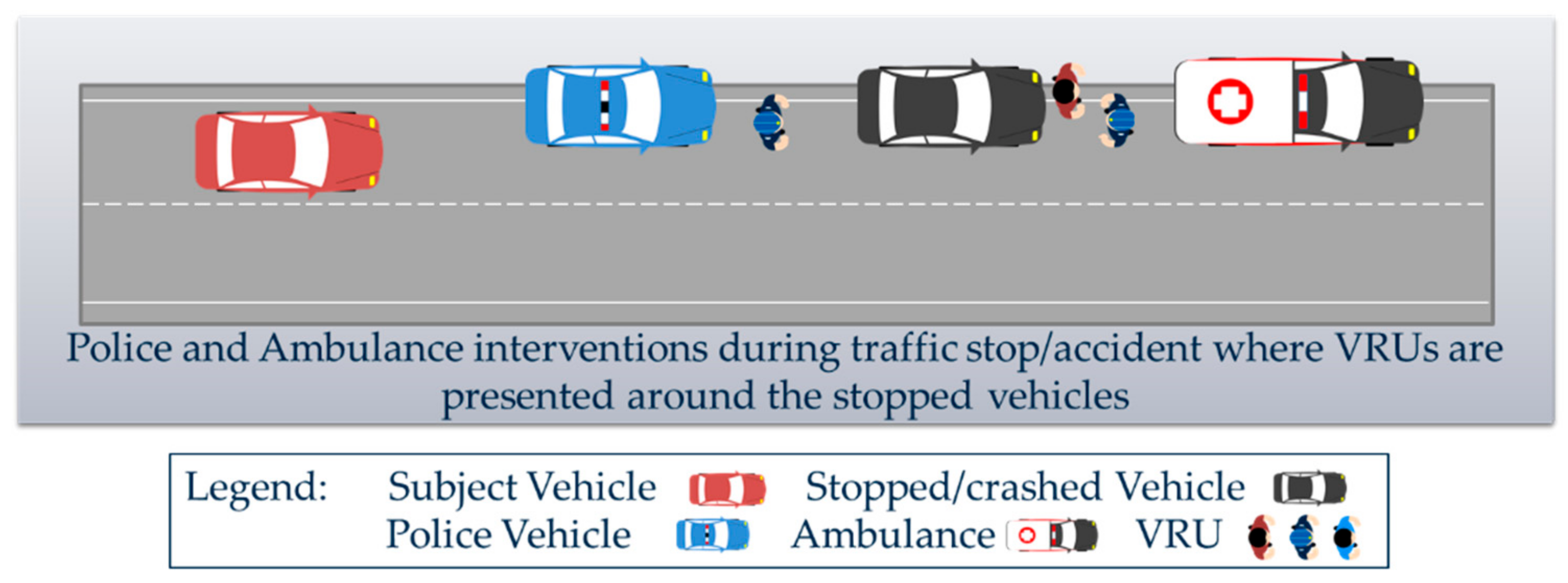
3.5. Occupants Moving Outside Stopped Vehicles
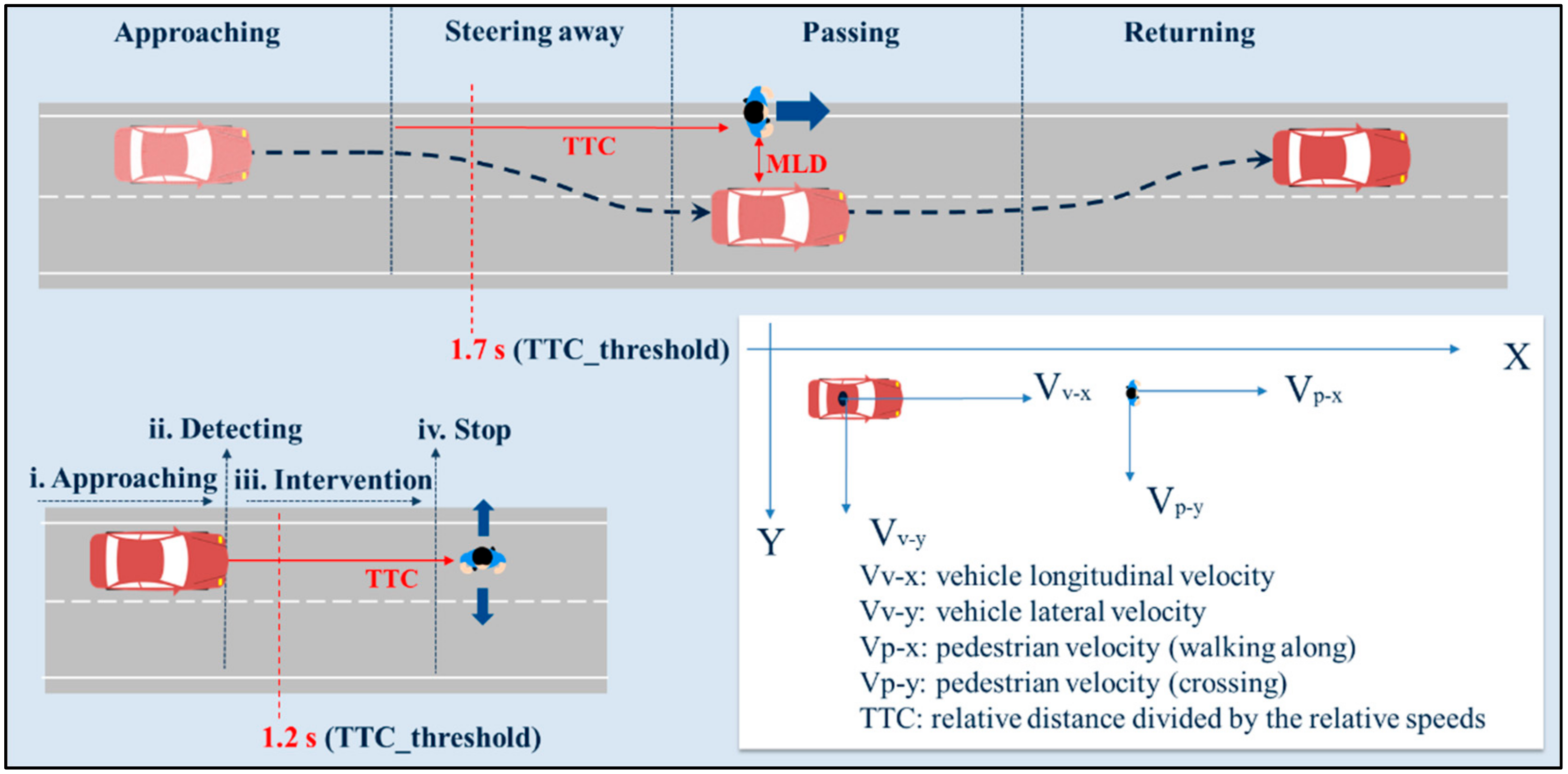
4. Discussion
- Example-1: Steering away from Pedestrian
- Example-2: Braking for Pedestrian
5. Conclusions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors and Year | Region | Targeted Population | Main Goals/Outcomes |
|---|---|---|---|
| [1] WHO, 2017 | Worldwide | Pedestrians | The report provides information for use in developing and implementing comprehensive measures to improve pedestrian safety. The outcomes contribute to implementing effective interventions that improve pedestrian safety, utilizing a comprehensive approach that focuses on engineering, enforcement, and education measures. |
| [2] The European Union (2010/40/EU) consolidated version: 9 January 2018 | Europe | Overall | The aim is to develop a framework for the deployment of Intelligent Transport Systems in the field of road transport and for interfaces with other modes of transport. It also aims to enable various users to be better informed and make safer and more coordinated use of transport networks. The outcomes contribute to provide specifications and standards that ensure a coordinated and effective deployment of Intelligent Transport Systems within the European Union. |
| [3] Boda (2017) | Europe | Pedestrians and cyclists | The study aims to develop new knowledge about driver behavior with VRU and integrate it into assessment programs, such as Euro-NCAP, to improve their scenario-based evaluation of the systems. They included the developed knowledge in a counterfactual analysis framework for safety-benefit evaluation. It is established that, during driver-VRU interaction, the moment a VRU becomes visible to the driver had the most significant influence on the driver’s braking behavior. |
| [4] Sun et al. (2003) | USA | Pedestrians | The study aims to develop realistic models for driver-pedestrian interaction at an uncontrolled two-lane mid-block crosswalk. Different methodologies for modeling pedestrian gap acceptance and the motorist yield are proposed and examined in a field study. |
| [5] WHO (2018) | Worldwide | Overall | The number of road traffic deaths continues to climb, and the SDG goal to halve road traffic deaths by 2020 has not been achieved. Reviewing the critical risk factors does show; however, that progress is being made in improving key road safety laws, making infrastructure safer, adopting vehicle standards, and improving access to post-crash care. |
| [6] Maki et al. (2003) | Japan | Bicyclists and pedestrians | Vehicle to bicyclist and pedestrian collisions were investigated based on national and in-depth accident data analyses and mathematical simulations in Japan. Component test procedures have been proposed for evaluating bicyclist and pedestrian safety based on the impact area and angle. |
| [7] OECD, Fertility rates (indicator) 2015 | OECD countries | Overall | The report provides statistical analyses of the total fertility rates |
| [8] National Center for Statistics and Analysis, NHTSA (2018) | USA | Pedestrians | Traffic Safety Facts obtained from the Fatality Analysis Reporting System (FARS) |
| [9] Bella and Silvestri (2021) | Italy | Pedestrians | The aim is to contribute to the development of pedestrian warning systems. |
| [10] Litman (2003) | USA | Pedestrians | The aim is to promote the benefits of walk and walkability. |
| [11] Wegman et al. (2012) | The Netherlands | Bicyclists | The study discusses the road safety problems of cycling and cyclists. |
| [12] Jacobsen (2015) | USA | Bicyclists and pedestrians | The study aims to examine the relationship between the numbers of people walking or bicycling and the frequency of vehicles to pedestrians and bicyclists collisions. |
| [14] Haworth (2019) | 17 developed countries | Bicyclists | A survey Study. |
| [16] Wisch et al. (2017) | Europe | Bicyclists | The study introduced the Use Cases derived from the car-to-cyclists crash data analysis. |
| [18] Schepers (2017) | The Netherlands | Bicyclists | The study explores factors contributing to the 80% reduction in the number of cyclists killed (predominantly bicycle–motor vehicle crashes) per billion bicycle kilometers in the Netherlands over thirty years. |
| [19] Balanovic (2016) | New Zealand | Bicyclists | A multi-phase investigation to improve cycling safety by changing motorist overtaking behavior. |
| [20] Ekström and Linder (2017) | Sweden | Bicyclists | The study aims to identify patterns among fatally injured cyclists in Sweden to suggest general improvements in cycling safety and specific traffic conditions. |
| [21] Amin et al. (2019) | Sweden | Overall | This report describes and analyzes road safety trends in Sweden. |
| [22] Retting (2017) | USA | Pedestrians | The study reports pedestrian fatalities by state and roadway type. |
| [25] Laird et al. (2013) | Ireland | Bicyclists and pedestrians | The study presents evidence on the value of pedestrian and cyclist infrastructure in rural roadways. |
| [31] Hayashi et al. (2013) | Japan | Pedestrians | The study evaluates the effectiveness of a pre-crash safety system with pedestrian collision avoidance to reduce vehicle-to-pedestrian crashes. |
| [32] Lindman et al. (2010) | Europe | Pedestrians | The study presents a sophisticated method for estimating the potential effectiveness of a technology designed to support the car driver in mitigating or avoiding crashes with pedestrians. |
| [34] Euro NCAP (2021) | Europe | VRU | The report provides Test Protocols (car-to-pedestrian, car-to-bicyclist, and car-to-motorcyclist) for AEB VRU Systems. |
| [36] Schram (2015) | Europe | VRU | The aim is to develop test procedures for assessing AEB Pedestrian systems. |
| [37] Sander (2018) | USA and Germany | Overall | Real-accidents and driving data from the USA were used to compare the capacity of onboard sensing and V2X communication to save lives. Real-accidents data from Germany were utilized to simulate accidents with and without Intersection AEB using different parameter settings of technical aspects and driver comfort boundaries. Machine learning techniques were used to identify opportunities for data clustering. Intersection AEB was found to be effective in reducing accidents and mitigating injuries up to a specific limit. |
| [39] ITARDA (2014) | Japan | Pedestrians | Statistics of pedestrian crashes on limited-access highways (expressways) |
| [41] Tabone (2021) | Non-applicable | VRU | This study reports the opinion of sixteen Human Factors researchers about their perspectives on AVs and the interaction with VRUs in the future urban environment. The interviewees believed that fully autonomous vehicles will not be introduced in the coming decades and that intermediate levels of automation, specific AV services, or shared control will be used instead. They foresaw a significant role of intelligent infrastructures and expressed a need for AV-VRU segregation. |
| [42] Dollar et al. (2011) | USA | Pedestrians | The study evaluated the performance of sixteen state-of-the-art pedestrian detectors across six data sets. Results show that system performance still has much room for improvement despite significant progress, particularly the detection at low resolutions and partially occluded pedestrians. |
| [43] Combs et al. (2019) | USA | Pedestrians | The study investigates automated vehicles’ potential for reducing pedestrian fatalities. The study analyzed 5000 pedestrian fatalities recorded in 2015 (FARS) and virtually reconstructed them under a hypothetical scenario that replaces involved vehicles with automated versions equipped with state-of-the-art (as of December 2017) sensor technology. |
| [44] de Miguel et al. (2019) | Spain | Pedestrians | The study evaluated pedestrians’ interaction with level-5 automated driving vehicles on public roads. |
| [45] Gelbal et al. (2020) | USA | Pedestrians | This study evaluated pedestrian collision avoidance systems for low-speed autonomous shuttles based on Vehicle-to-Pedestrian (V2P) communication. |
| [46] European Commission (2017) | Europe | Overall | Real-accidents data report |
| [49] Hu and Cicchino (2018) | USA | Pedestrians | The study investigates how pedestrian fatalities trends vary by roadway, environmental, personal, and vehicle factors. |
| [50] Wang and Cicchino (2020) | USA | Pedestrians | The study investigates the characteristics of pedestrian crashes on interstates and other freeways in the United States. |
| [51] Hunter (2020) | USA | Pedestrians | This case study aimed to determine the causes of pedestrian crashes on interstate highways and potential countermeasures to reduce the crash rate for these accidents. |
| [57] Harruff (1998) | USA | Pedestrians | The study performed a retrospective analysis of 217 pedestrian fatalities in Seattle over six years using medical examiner records with essentially all deaths examined by autopsy. |
| [58] Johnson (1997) | USA | Pedestrians | The study identified crash types and factors contributing to fatal pedestrian crashes on Interstate highways and surveyed countermeasures that address the problem. |
| [59] Cieslik et al. (2019) | Europe | VRU | The project (PROSPECT) aims to improve the effectiveness of VRU avoidance systems compared to those currently on the market by expanding the scope of urban scenarios addressed and improving the autonomous emergency braking and steering systems. |
| [60] Rosén and Sander (2009) | Sweden | Pedestrians | The study developed an improved risk function for adult pedestrians hit by the front of passenger cars based on the most extensive in-depth pedestrian accident study undertaken to date. |
| [61] IIHS-HLDI (2021) | USA | Pedestrians | Fatality facts report |
| [62] Japan Automobile Federation (2020) | Japan | Motorized Vehicles | An annual report of vehicles required service on roadways. |
| [67] Officer Magazine (2020) | USA | VRU | News: A police officer was hit in a highway crash. |
| [68] Andersson and Chapman (2011) | UK | Overall | This study investigated the impact of weather factors on road maintenance and traffic accidents rate. |
| [69] Li and Bai (2009) | USA | Overall | The study reports the impact of the work zone risk factors on the probability of fatalities when severe crashes occur based on a screening process that incorporates both statistical analyses and empirical research findings. |
| [71] Centers for Disease Control and Prevention (1994) | USA | Pedestrians | The report uses FARS data to characterize intoxicated pedestrians older than 14 years killed in motor-vehicle-related crashes. |
| [72] kiiitv.com (2020) | USA | VRU | News: A police officer was hit in a highway crash. |
| [73] nbcboston.com (2020) | USA | VRU | News: A police officer was hit in a highway crash (Tesla autopilot). |
| [74] nbcconnecticut.com (2019) | USA | VRU | News: A police officer was hit in a highway crash. |
| [75] Police Magazine (2020) | Australian | VRU | News: A police officer was hit in a highway crash. |
| [79] ISO WD34501 (2021) | Not applicable | Overall | Automated Vehicle Standardization |
| [80] taiwannews.com (2020) | Taiwan | VRU | News: Video shows Tesla on autopilot slam into a truck on Taiwan highway. |
| [81] Lübbe (2015) | Sweden | Pedestrians | This study developed an integrated pedestrian safety assessment method using data from passive safety and active systems evaluations and demonstrated its use in assessing combinations of passive and active safety systems of autonomous emergency braking and forward-collision warning.The study outcomes show that the autonomous emergency braking system has a safety benefit broadly equivalent to increasing the Euro NCAP passive safety rating. |
| [83] Wisch et al. (2013) | Europe | VRU | A project aims to improve VRUs safety by developing test and assessment procedures for forward-looking integrated pedestrian safety systems that incorporate passive safety and autonomous emergency braking systems. |
| [84] Yanagisawa et al. (2017) | USA | Pedestrians | The study estimates the effectiveness and potential safety benefits of pedestrian crash avoidance and mitigation systems in light vehicles. |
| [85] Chen et al. (2015) | China | Pedestrians | The study conducted in-depth accident analysis to describe accident scenarios for pedestrian accidents in China and to support the development of test procedures for assessing autonomous emergency braking systems. |
| [86] Kovaceva et al. (2019) | Europe | Cyclists | The study quantified drivers’ comfort zone boundaries and investigated influencing factors while drivers overtake cyclists in a naturalistic setting. |
| [87] Rasch et al. (2020) | France and Sweden | Pedestrians | The study aimed to address pedestrian-overtaking maneuvers on rural roads by analyzing how drivers adjust their behavior using safety metrics extracted from field and driving simulator studies. The study analyzed and modeled the driver’s comfort zone when overtaking a pedestrian. |
| [90] Brännström et al. (2014) | Sweden | Overall | The study reports an evaluation of autonomous emergency braking and steering systems. |
| [91] Euro-NCAP (2019) | Europe | Overall | The report explains the safety assessments of the autonomous emergency braking system. |
| [92] European Road Safety Observatory (2016) | Europe | Pedestrians | A traffic safety fact report. |
References
- World Health Organization (WHO). Pedestrian Safety: A Road Safety Manual for Decision-Makers and Practitioners; World Health Organization (WHO): Geneva, Switzerland, 2013. [Google Scholar]
- European Union. Directive 2010/40/EU of the European Parliament and of the Council of 7 July 2010 on the Framework for the Deployment of Intelligent Transport Systems in the Field of Road Transport and for Interfaces with Other Modes of Transport (Text with EEA Relevance). Off. J. Eur. Union 2010, 207, 1–13. [Google Scholar]
- Boda, C.-N. Driver Interaction with Vulnerable Road Users: Understanding and Modelling Driver Behaviour for the Design and Evaluation of Intelligent Safety Systems; Chalmers Tekniska Hogskola: Gothenburg, Sweden, 2017. [Google Scholar]
- Sun, D.; Ukkusuri, S.; Benekohal, R.F.; Waller, S.T. Modeling of motorist-pedestrian interaction at uncontrolled mid-block crosswalks. In Proceedings of the Transportation Research Record, TRB Annual Meeting CD-ROM, Washington, DC, USA, 12–16 January 2003. [Google Scholar]
- World Health Organization (WHO). Global Status Report on Road Safety 2018: Summary; World Health Organization: Geneva, Switzerland, 2018. [Google Scholar]
- Maki, T.; Kajzer, J.; Mizuno, K.; Sekine, Y. Comparative analysis of vehicle–bicyclist and vehicle–pedestrian accidents in Japan. Accid. Anal. Prev. 2003, 35, 927–940. [Google Scholar] [CrossRef]
- OECD. Fertility Rates (Indicator). 2015. Available online: https://0-www-oecd--ilibrary-org.brum.beds.ac.uk/social-issues-migration-health/fertility-rates/indicator/english_8272fb01-en (accessed on 4 April 2021).
- National Center for Statistics and Analysis. Pedestrians: 2016 Data. (Traffic Safety Facts. Report No. DOTHS 812 493); National Highway Traffic Safety Administration: Washington, DC, USA, 2018.
- Bella, F.; Silvestri, M. Vehicle–pedestrian interactions into and outside of crosswalks: Effects of driver assistance systems. Transport 2021, 36, 98–109. [Google Scholar] [CrossRef]
- Litman, T.A. Economic value of walkability. Transp. Res. Rec. 2003, 1828, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Wegman, F.; Zhang, F.; Dijkstra, A. How to make more cycling good for road safety? Accid. Anal. Prev. 2012, 44, 19–29. [Google Scholar] [CrossRef]
- Jacobsen, P.L. Safety in numbers: More walkers and bicyclists, safer walking and bicycling. Inj. Prev. 2015, 21, 271–275. [Google Scholar] [CrossRef]
- Aarts, L.; Van Schagen, I. Driving speed and the risk of road crashes: A review. Accid. Anal. Prev. 2006, 38, 215–224. [Google Scholar] [CrossRef]
- Haworth, N.S.; Houtenbos, A.; Shinar, D. International survey of bicycling exposure, crash involvement, behaviors, and attitudes: Preliminary results. In Proceedings of the International Cycling Safety Conference, Hanover, Germany, 15–16 September 2015. [Google Scholar]
- Pucher, J.; Buehler, R. Cycling towards a More Sustainable Transport Future. Transp. Rev. 2017, 37, 689–694. [Google Scholar] [CrossRef] [Green Version]
- Wisch, M.; Lerner, M.; Kovaceva, J.; Bálint, A.; Gohl, I.; Schneider, A.; Juhász, J.; Lindman, M. Car-to-cyclist crashes in Europe and derivation of use cases as basis for test scenarios of next generation advanced driver assistance systems—Results from PROSPECT. In Proceedings of the Enhanced Safety of Vehicles Conference, Detroit, MI, USA, 5–8 June 2017. [Google Scholar]
- Weijermars, W.; Bos, N.; Stipdonk, H.L. Serious road injuries in the Netherlands dissected. Traffic Inj. Prev. 2016, 17, 73–79. [Google Scholar] [CrossRef]
- Schepers, P.; Twisk, D.; Fishman, E.; Fyhri, A.; Jensen, A. The Dutch road to a high level of cycling safety. Saf. Sci. 2017, 92, 264–273. [Google Scholar] [CrossRef] [Green Version]
- Balanovic, J.; Davison, A.; Thomas, J.; Bowie, C.; Frith, B.; Lusby, M.; Kean, R.; Schmitt, L.; Beetham, J.; Robertson, C. Investigating the Feasibility of Trialling a Minimum Overtaking Gap Law for Motorists Overtaking Cyclists in New Zealand; New Zealand Transport Agency Internal Report; NZ Transport Agency: Wellington, New Zealand, 2016. Available online: https://www.nzta.govt.nz/assets/Walking-Cycling-and-Public-Transport/docs/Minimum-Overtaking-Gap-Feasibility-Study-FINAL.pdf (accessed on 1 September 2021).
- Ekström, C.; Linder, A. Fatally Injured Cyclists in Sweden 2005–2015: Analysis of Accident Circumstances, Injuries and Suggestions for Safety Improvements; VTI Notat 5A-2017; Statens väg-och Transportforskningsinstitut: Linköping, Sweden, 2017. Available online: http://urn.kb.se/resolve?urn=urn:nbn:se:vti:diva-11749 (accessed on 5 April 2021).
- Amin, K.; Bengtsson, K.; Hedlund, J.; Larsson, P.; Berg, H.-Y.; Forsman, Å.; Vadeby, A.; Lindholm, M.; Sternlund, S.; Rizzi, M. Analysis of Road Safety Trends 2018: Management by Objectives for Road Safety Work towards the 2020 Interim Targets; Trafikverket, The Swedish Transport Administration: Borlänge, Sweden, 2019. Available online: http://trafikverket.diva-portal.org/smash/get/diva2:1389250/FULLTEXT01.pdf (accessed on 8 December 2021).
- Retting, R. Pedestrian Traffic Fatalities by State; Governors Highway Safety Association: Washington, DC, USA, 2017. [Google Scholar]
- NHTSA. Early Estimates of 2019 Motor Vehicle Traffic Data Show Reduced Fatalities for Third Consecutive Year; National Highway Traffic Safety Administration: Washington, DC, USA, 2020. Available online: https://www.nhtsa.gov/press-releases/early-estimates-2019-motor-vehicle-traffic-data-show-reduced-fatalities-third (accessed on 30 March 2021).
- Peden, M. Global collaboration on road traffic injury prevention. Int. J. Inj. Control Saf. Promot. 2005, 12, 85–91. [Google Scholar] [CrossRef]
- Laird, J.; Page, M.; Shen, S. The value of dedicated cyclist and pedestrian infrastructure on rural roads. Transp. Policy 2013, 29, 86–96. [Google Scholar] [CrossRef]
- United Nations. Vienna Convention on Road Traffic. 1968. Available online: https://unece.org/DAM/trans/conventn/crt1968e.pdf (accessed on 8 December 2021).
- Farmer, C.M. Relationship of traffic fatality rates to maximum state speed limits. Traffic Inj. Prev. 2017, 18, 375–380. [Google Scholar] [CrossRef]
- Ojsteršek, T.C.; Topolšek, D. Eye tracking use in researching driver distraction: A scientometric and qualitative literature review approach. J. Eye Mov. Res. 2019, 12. [Google Scholar] [CrossRef]
- Yoshizawa, A.; Iwasaki, H. Analysis of driver’s visual attention using near-miss incidents. In Proceedings of the 2017 IEEE 16th International Conference on Cognitive Informatics & Cognitive Computing (ICCI* CC), Oxford, UK, 26–28 July 2017; pp. 353–360. [Google Scholar]
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three decades of driver assistance systems: Review and future perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- Hayashi, H.; Inomata, R.; Fujishiro, R.; Ouchi, Y.; Suzuki, K.; Nanami, T. Development of pre-crash safety system with pedestrian collision avoidance assist. In Proceedings of the 23rd Enhancement Safety of Vehicles (ESV), Seoul, Korea, 27–30 May 2013. [Google Scholar]
- Lindman, M.; Ödblom, A.; Bergvall, E.; Eidehall, A.; Svanberg, B.; Lukaszewicz, T. Benefit Estimation Model for Pedestrian Auto Brake Functionality. In Proceedings of the 4th International Conference on Expert Symposium on Accident Research, Hanover, Germany, 16–18 September 2010. [Google Scholar]
- European New Car Assessment Programme (Euro NCAP). Euro NCAP 2025 Roadmap: In Pursuit of Vision Zero; European New Car Assessment Programme: Leuven, Belgium, 2017. Available online: https://cdn.euroncap.com/media/30700/euroncap-roadmap-2025-v4.pdf (accessed on 2 July 2021).
- European New Car Assessment Programme (Euro NCAP). Test Protocol-AEB VRU Systems; Version: 4.0.0; June 2021. Available online: https://cdn.euroncap.com/media/43371/euro-ncap-aeb-vru-test-protocol-v301.pdf (accessed on 2 July 2021).
- Shao, K.; Zheng, J.; Huang, K.; Qiu, M.; Sun, Z. Robust model referenced control for vehicle rollover prevention with time-varying speed. Int. J. Veh. Des. 2021, 85, 48–68. [Google Scholar] [CrossRef]
- Schram, R.; Williams, A.; van Ratingen, M.; Ryrberg, S.; Sferco, R. Euro NCAP’s first step to assess Autonomous Emergency braking (AEB) for Vulnerable Road Users. In Proceedings of the 24th Enhanced Safety of Vehicles (ESV) Conference, Gothenburg, Sweden, 8–11 June 2015. [Google Scholar]
- Sander, U. Predicting Safety Benefits of Automated Emergency Braking at Intersections-Virtual Simulations Based on Real-World Accident Data; Chalmers University of Technology: Gothenburg, Sweden, 2018. [Google Scholar]
- Koopman, P.; Wagner, M. Challenges in autonomous vehicle testing and validation. SAE Int. J. Transp. Saf. 2016, 4, 15–24. [Google Scholar] [CrossRef] [Green Version]
- ITARDA. Pedestrian Crashes on Expressways; Institute for Traffic Accident Research and Data Analysis: Tokyo, Japan, 2014. Available online: https://www.itarda.or.jp/contents/75/info103_e.pdf (accessed on 5 June 2020).
- European Commission. Road Safety in the European Union: Trends, Statistics and Main Challenges. Technical Report. 2015. Available online: https://op.europa.eu/en/publication-detail/-/publication/a7ac77bc-d707-4d94-b98d-2a5491770c9c (accessed on 12 July 2020).
- Tabone, W.; de Winter, J.; Ackermann, C.; Bärgman, J.; Baumann, M.; Deb, S.; Emmenegger, C.; Habibovic, A.; Hagenzieker, M.; Hancock, P. Vulnerable road users and the coming wave of automated vehicles: Expert perspectives. Transp. Res. Interdiscip. Perspect. 2021, 9, 100293. [Google Scholar] [CrossRef]
- Dollar, P.; Wojek, C.; Schiele, B.; Perona, P. Pedestrian detection: An evaluation of the state of the art. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 34, 743–761. [Google Scholar] [CrossRef]
- Combs, T.S.; Sandt, L.S.; Clamann, M.P.; McDonald, N.C. Automated vehicles and pedestrian safety: Exploring the promise and limits of pedestrian detection. Am. J. Prev. Med. 2019, 56, 1–7. [Google Scholar] [CrossRef] [Green Version]
- de Miguel, M.Á.; Fuchshuber, D.; Hussein, A.; Olaverri-Monreal, C. Perceived pedestrian safety: Public interaction with driverless vehicles. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019. [Google Scholar]
- Gelbal, S.Y.; Aksun-Guvenc, B.; Guvenc, L. Collision avoidance of low speed autonomous shuttles with pedestrians. Int. J. Automot. Technol. 2020, 21, 903–917. [Google Scholar] [CrossRef]
- European Commission. Traffic Safety Basic Facts on Motorways. Directorate General for Transport. 2017. Available online: https://ec.europa.eu/transport/road_safety/sites/default/files/pdf/statistics/dacota/bfs2017_motorways.pdf (accessed on 8 December 2021).
- Howard, C.; Linder, A. Review of Swedish Experiences Concerning Snalysis of People Injured in Traffic Accidents; Statens väg-och transportforskningsinstitut: Linköping, Sweden, 2014. [Google Scholar]
- Carroll, C.P.; Cochran, J.A.; Price, J.P.; Guse, C.E.; Wang, M.C. The AIS-2005 Revision in Severe Traumatic Brain Injury: Mission Accomplished or Problems for Future Research? Ann. Adv. Automot. Med. 2010, 54, 233–238. [Google Scholar]
- Hu, W.; Cicchino, J.B. An examination of the increases in pedestrian motor-vehicle crash fatalities during 2009–2016. J. Saf. Res. 2018, 67, 37–44. [Google Scholar] [CrossRef]
- Wang, J.; Cicchino, J.B. Fatal pedestrian crashes on interstates and other freeways in the United States. J. Saf. Res. 2020, 74, 1–7. [Google Scholar] [CrossRef]
- Hunter, A.C. Countermeasures for Pedestrian-Involved Accidents on Interstate-Highways; Civil Engineering Undergraduate Honors Theses. 2020. Available online: https://scholarworks.uark.edu/cveguht/57 (accessed on 8 December 2021).
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ 2021, 372, n71. [Google Scholar] [CrossRef]
- Weingroff, R.F. Federal-aid highway act of 1956: Creating the interstate system. Public Roads 1996, 60, 10–17. [Google Scholar]
- MILT. Toll and Toll-Free Roads in Current Arterial High-Standard Highway Network. 2017. Available online: https://www.mlit.go.jp/road/road_e/03key_challenges/6-1.pdf (accessed on 22 June 2020).
- European Commission. Facts and Figures Motorways; European Road Safety Observatory, European Commission, Directorate General for Transport: Brussels, Belgium, 2021. Available online: https://ec.europa.eu/transport/road_safety/system/files/2022-01/F%26F_motorways_20211220.pdf (accessed on 1 December 2021).
- American Association of State Highway and Transportation Officials (AASHTO). Highway Safety Manual; National Research Council, Transportation Research Board, Task Force on Development of the Highway Safety Manual, Transportation Officials, Joint Task Force on the Highway Safety Manual, Eds.; AASHTO: Washington, DC, USA, 2010; Volume 1. [Google Scholar]
- Harruff, R.C.; Avery, A.; Alter-Pandya, A.S. Analysis of circumstances and injuries in 217 pedestrian traffic fatalities. Accid. Anal. Prev. 1998, 30, 11–20. [Google Scholar] [CrossRef]
- Johnson, C.D. Pedestrian fatalities on interstate highways: Characteristics and countermeasures. Transp. Res. Rec. 1997, 1578, 23–29. [Google Scholar] [CrossRef]
- Cieslik, I.; Kovaceva, J.; Bruyas, M.-P.; Large, D.R.; Kunert, M.; Krebs, S.; Arbitmann, M. Improving the Effectiveness of Active Safety Systems to Significantly Reduce Accidents with Vulnerable Road Users—The Project PROSPECT (Proactive Safety for Pedestrians and Cyclists). In Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles, Eindhoven, The Netherlands, 10–13 June 2019. [Google Scholar]
- Rosén, E.; Sander, U. Pedestrian fatality risk as a function of car impact speed. Accid. Anal. Prev. 2009, 41, 536–542. [Google Scholar] [CrossRef]
- IIHS-HLDI. Fatality Facts 2019: Pedestrians; IIHS-HLDI: Arlington, VA, USA, 2021. [Google Scholar]
- Japan Automobile Federation (JAF). Available online: https://jaf.or.jp/common/about-road-service/contents (accessed on 14 July 2020).
- Kimura, R. Japan’s dilemma with the definition of death. Kennedy Inst. Ethics J. 1991, 1, 123–131. [Google Scholar] [CrossRef]
- Insurance Institute for Highway Safety. Fatality Statistics. 2019. Available online: https://www.iihs.org/topics/fatality-statistics (accessed on 22 July 2021).
- Uddin, M.; Ahmed, F. Pedestrian injury severity analysis in motor vehicle crashes in Ohio. Safety 2018, 4, 20. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Lyu, Y.; Böttcher, K.; Rötting, M. External interface-based autonomous vehicle-to-pedestrian communication in urban traffic: Communication needs and design considerations. Int. J. Hum.-Comput. Interact. 2020, 36, 1258–1272. [Google Scholar] [CrossRef]
- Officer Magazine. Port Authority Police Officer Hit by Speeding Driver in Jersey City. 2020. Available online: https://www.officer.com/command-hq/technology/traffic/video/21135858/port-authority-police-officer-hit-by-speeding-driver-in-jersey-city (accessed on 8 December 2021).
- Andersson, A.K.; Chapman, L. The impact of climate change on winter road maintenance and traffic accidents in West Midlands, UK. Accid. Anal. Prev. 2011, 43, 284–289. [Google Scholar] [CrossRef]
- Li, Y.; Bai, Y. Highway work zone risk factors and their impact on crash severity. J. Transp. Eng. 2009, 135, 694–701. [Google Scholar] [CrossRef]
- Cheu, R.L.; Ritchie, S.G. Automated detection of lane-blocking freeway incidents using artificial neural networks. Transp. Res. Part C Emerg. Technol. 1995, 3, 371–388. [Google Scholar] [CrossRef]
- Centers for Disease Control and Prevention. Motor-vehicle-related deaths involving intoxicated pedestrians—United States, 1982–1992. MMWR Morb. Mortal. Wkly. Rep. 1994, 43, 249–253. [Google Scholar]
- Cruz-Aedo, J. Corpus Christi Police Officer Killed during Traffic Stop along SPID; KIII: Corpus Christi, TX, USA, 2020. Available online: https://www.kiiitv.com/article/news/local/corpus-christi-police-close-all-lanes-on-state-highway-358-after-major-accident/503-aaf383e6-9131-44fb-b81f-e0e6a42c33c8 (accessed on 15 May 2020).
- Kath, R. Police: Tesla That Hit Mass. State Trooper’s Vehicle Was in Autopilot. 2020. Available online: https://www.nbcboston.com/investigations/police-tesla-that-hit-mass-state-troopers-vehicle-was-in-autopilot/2151164/ (accessed on 8 December 2021).
- Connecticut State Police. A Collision Involving a Stopped Connecticut State Police Vehicle Last Year. 2019. Available online: https://www.nbcboston.com/investigations/federal-government-investigating-tesla-crash-in-massachusetts/2229521/ (accessed on 8 December 2021).
- POLICE Magazine. 4 Australian Officers Hit by Truck and Killed during Traffic Stop. 2020. Available online: https://www.policemag.com/551956/4-australian-officers-hit-by-truck-and-killed-during-traffic-stop (accessed on 8 December 2021).
- Clark, B.; Parkhurst, G.; Ricci, M. Introducing Driverless Cars to UK Roads. 2016. Available online: https://uwe-repository.worktribe.com/922216/1/UWE%20autonomous%20vehicle%20interactions%20literature%20review%20June%202016.pdf (accessed on 8 December 2021).
- Wang, T.-H.; Manivasagam, S.; Liang, M.; Yang, B.; Zeng, W.; Urtasun, R. V2vnet: Vehicle-to-vehicle communication for joint perception and prediction. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer: Cham, Switzerland, 2020; pp. 605–621. [Google Scholar]
- UNECE. Proposal for a New UN Regulation on Uniform Provisions Concerning the Approval of Vehicles with Regards to Automated Lane Keeping System. 2020. Available online: https://unece.org/fileadmin/DAM/trans/doc/2020/wp29grsg/GRSG-118-05e.pdf (accessed on 8 December 2021).
- ISO/DIS 34501; Road Vehicles—Terms and Definitions of Test Scenarios for Automated Driving Systems. International Organization for Standardization: Geneva, Switzerland, 2021.
- Everington, K. Video Shows Tesla on Autopilot Slam into Truck on Taiwan Highway. Available online: https://www.taiwannews.com.tw/en/news/3943199 (accessed on 3 June 2020).
- Lübbe, N. Integrated Pedestrian Safety Assessment: A Method to Evaluate Combinations of Active and Passive Safety; Chalmers Tekniska Hogskola: Gothenburg, Sweden, 2015. [Google Scholar]
- Wisch, M.; Seiniger, P.; Edwards, M.; Schaller, T.; Pla, M.; Aparicio, A.; Geronimi, S.; Lubbe, N. European project AsPeCSS-interim result: Development of test scenarios based on identified accident scenarios. In Proceedings of the 23rd International Technical Conference on the Enhanced Safety of Vehicles (ESV) National Highway Traffic Safety Administration, Seoul, Korea, 27–30 May 2013. [Google Scholar]
- Wisch, M.; Seiniger, P.; Pastor, C.; Edwards, M.; Visvikis, C.; Reeves, C. Scenarios and Weighting Factors for Pre-Crash Assessment of Integrated Pedestrian Safety Systems. EU FP7 ASPECSS Deliverable 1.1, p. 59. 2013. Available online: https://trimis.ec.europa.eu/sites/default/files/project/documents/9795/periodic1-aspecss-period1-publishable-summary-2013-06-05.pdf (accessed on 8 December 2021).
- Yanagisawa, M.; Swanson, E.; Azeredo, P.; Najm, W. Estimation of Potential Safety Benefits for Pedestrian Crash Avoidance/Mitigation Systems; National Highway Traffic Safety Administration: Washington, DC, USA, 2017.
- Chen, Q.; Lin, M.; Dai, B.; Chen, J. Typical Pedestrian Accident Scenarios in China and Crash Severity Mitigation by Autonomous Emergency Braking Systems; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- Kovaceva, J.; Nero, G.; Bärgman, J.; Dozza, M. Drivers overtaking cyclists in the real-world: Evidence from a naturalistic driving study. Saf. Sci. 2019, 119, 199–206. [Google Scholar] [CrossRef]
- Rasch, A.; Panero, G.; Boda, C.-N.; Dozza, M. How do drivers overtake pedestrians? Evidence from field test and naturalistic driving data. Accid. Anal. Prev. 2020, 139, 105494. [Google Scholar] [CrossRef]
- Jansen, R.J.; Wesseling, S. Harsh Braking by Truck Drivers: A Comparison of Thresholds and Driving Contexts Using Naturalistic Driving Data. In Proceedings of the 6th Humanist Conference, The Hague, The Netherlands, 13–14 June 2018. [Google Scholar]
- Neale, V.L.; Dingus, T.A.; Klauer, S.G.; Sudweeks, J.; Goodman, M. An overview of the 100-car naturalistic study and findings. Natl. Highw. Traffic Saf. Adm. Pap. 2005, 5, 0400. [Google Scholar]
- Brännström, M.; Coelingh, E.; Sjöberg, J. Decision-making on when to brake and when to steer to avoid a collision. Int. J. Veh. Saf. 1 2014, 7, 87–106. [Google Scholar] [CrossRef]
- European New Car Assessment Programme. Assessment Protocol—Safety Assist; European New Car Assessment Programme: Leuven, Belgium, 2019. Available online: http://www.aseancap.org/v2/wp-content/uploads/2020/01/6.-ASEAN-NCAP-Assessment-Protocol-Safety-Assist-2.0_2019-FINAL_1-NOV-2019.pdf (accessed on 8 December 2021).
- European Road Safety Observatory. Traffic Safety Basic Facts 2016—Pedestrians. 2016. Available online: https://ec.europa.eu/transport/road_safety/sites/default/files/pdf/statistics/dacota/bfs2016_pedestrians.pdf (accessed on 8 December 2021).
- Van Ratingen, M.; Williams, A.; Lie, A.; Seeck, A.; Castaing, P.; Kolke, R.; Adriaenssens, G.; Miller, A. The European new car assessment programme: A historical review. Chin. J. Traumatol. 2016, 19, 63–69. [Google Scholar] [CrossRef] [PubMed]
- Morando, A. Drivers’ Response to Attentional Demand in Automated Driving; Division of Vehicle Safety, Department of Mechanics and Maritime Sciences: Göteborg, Sweden, 2019. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muslim, H.; Antona-Makoshi, J. A Review of Vehicle-to-Vulnerable Road User Collisions on Limited-Access Highways to Support the Development of Automated Vehicle Safety Assessments. Safety 2022, 8, 26. https://0-doi-org.brum.beds.ac.uk/10.3390/safety8020026
Muslim H, Antona-Makoshi J. A Review of Vehicle-to-Vulnerable Road User Collisions on Limited-Access Highways to Support the Development of Automated Vehicle Safety Assessments. Safety. 2022; 8(2):26. https://0-doi-org.brum.beds.ac.uk/10.3390/safety8020026
Chicago/Turabian StyleMuslim, Husam, and Jacobo Antona-Makoshi. 2022. "A Review of Vehicle-to-Vulnerable Road User Collisions on Limited-Access Highways to Support the Development of Automated Vehicle Safety Assessments" Safety 8, no. 2: 26. https://0-doi-org.brum.beds.ac.uk/10.3390/safety8020026