

A Two-Layer Self-Organizing Map with Vector Symbolic Architecture for Spatiotemporal Sequence Learning and Prediction
 , ,
, ,
Abstract
:1. Introduction
- (a)
- Unsupervised learning ability for learning without pre-labeled data.
- (b)
- Representational learning of spatial and temporal elements as separate building blocks for the construction of spatiotemporal patterns and adapt to changing environments.
- (c)
- Ability to represent and manipulate temporal sequences of variable length (order).
- (d)
- Continuous online prediction of the next occurrence of a sequence based on sequential recall of a pattern from memory.
2. Related Work
2.1. Self Organization and Self-Organizing Maps
2.2. Hierarchical Temporal Memory (HTM)
2.3. Vector Symbolic Architecture (VSA)
3. The Proposed Algorithm: ST-SOM
| Algorithm 1: ST-SOM |
Input: , , Output: 1 2
; 3 ; 4 ; 5 ; 6
; 7
; |
3.1. SOM-Based Representational Learning of Spatial and Temporal Patterns
3.2. Hyperdimensional Encoding
- Step 1: The identification of the VSA alphabet;
- Step 2: The creation of the item memory;
- Step 3: The conversion of the temporal sequence to VSA vectors.
3.3. Memory Module and Prediction
| Algorithm 2: Predict label from memory |
 |
4. Experiments
4.1. Representational Learning of Spatial Elements and Temporal Relations
4.1.1. Representational Learning of Spatial Elements with the First SOM Layer
4.1.2. Representational Learning of Temporal Sequences with the Second SOM Layer: KTH Action Recognition
4.1.3. Representational Learning of Temporal Sequences with the Second SOM Layer: Indoor Movement Sensor Data
4.2. Demonstration of the Predictive Capability and Comparison with State of the Art
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Pairwise Alignment Algorithm with Neighborhood
References
- Ansari, M.Y.; Ahmad, A.; Khan, S.S.; Bhushan, G.; Mainuddin. Spatiotemporal clustering: A review. Artif. Intell. Rev. 2020, 53, 2381–2423. [Google Scholar] [CrossRef]
- Yu, M.; Bambacus, M.; Cervone, G.; Clarke, K.; Duffy, D.; Huang, Q.; Li, J.; Li, W.; Li, Z.; Liu, Q.; et al. Spatiotemporal event detection: A review. Int. J. Digit. Earth 2020, 13, 1339–1365. [Google Scholar] [CrossRef]
- Recanatesi, S.; Farrell, M.; Lajoie, G.; Deneve, S.; Rigotti, M.; Shea-Brown, E. Predictive learning as a network mechanism for extracting low-dimensional latent space representations. Nat. Commun. 2021, 12, 1417. [Google Scholar] [CrossRef] [PubMed]
- Astudillo, C.A.; Oommen, B.J. Self-organizing maps whose topologies can be learned with adaptive binary search trees using conditional rotations. Pattern Recognit. 2014, 47, 96–113. [Google Scholar] [CrossRef]
- Yu, D.; Hancock, E.R.; Smith, W.A. Learning a self-organizing map model on a Riemannian manifold. In Proceedings of the IMA International Conference on Mathematics of Surfaces, New York, UK, 7–9 September 2009; pp. 375–390. [Google Scholar]
- Berroukham, A.; Housni, K.; Lahraichi, M.; Boulfrifi, I. Deep learning-based methods for anomaly detection in video surveillance: A review. Bull. Electr. Eng. Inform. 2023, 12, 314–327. [Google Scholar] [CrossRef]
- Shaik, T.; Tao, X.; Higgins, N.; Li, L.; Gururajan, R.; Zhou, X.; Acharya, U.R. Remote patient monitoring using artificial intelligence: Current state, applications, and challenges. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2023, 13, e1485. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Khan, I.H.; Suman, R. Understanding the potential applications of Artificial Intelligence in Agriculture Sector. Adv. Agrochem 2023, 2, 15–30. [Google Scholar] [CrossRef]
- Feichtenhofer, C.; Fan, H.; Xiong, B.; Girshick, R.; He, K. A large-scale study on unsupervised spatiotemporal representation learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 19–25 June 2021; pp. 3299–3309. [Google Scholar]
- Ahsan, U.; Madhok, R.; Essa, I. Video jigsaw: Unsupervised learning of spatiotemporal context for video action recognition. In Proceedings of the 2019 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa Village, HI, USA, 7–11 January 2019; pp. 179–189. [Google Scholar]
- Mackenzie, J.; Roddick, J.F.; Zito, R. An evaluation of HTM and LSTM for short-term arterial traffic flow prediction. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1847–1857. [Google Scholar] [CrossRef]
- Birant, D.; Kut, A. ST-DBSCAN: An algorithm for clustering spatial–temporal data. Data Knowl. Eng. 2007, 60, 208–221. [Google Scholar] [CrossRef]
- Zhou, F.; De la Torre, F.; Hodgins, J.K. Hierarchical aligned cluster analysis for temporal clustering of human motion. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 582–596. [Google Scholar] [CrossRef]
- Niebles, J.C.; Wang, H.; Fei-Fei, L. Unsupervised learning of human action categories using spatial-temporal words. Int. J. Comput. Vis. 2008, 79, 299–318. [Google Scholar] [CrossRef]
- Kotti, M.; Moschou, V.; Kotropoulos, C. Speaker segmentation and clustering. Signal Process. 2008, 88, 1091–1124. [Google Scholar] [CrossRef]
- Shi, Z.; Pun-Cheng, L.S. Spatiotemporal data clustering: A survey of methods. ISPRS Int. J. Geo-Inf. 2019, 8, 112. [Google Scholar] [CrossRef]
- Prasad, M.V.; Balakrishnan, R. Spatio-Temporal association rule based deep annotation-free clustering (STAR-DAC) for unsupervised person re-identification. Pattern Recognit. 2022, 122, 108287. [Google Scholar]
- Agrawal, K.; Garg, S.; Sharma, S.; Patel, P. Development and validation of OPTICS based spatio-temporal clustering technique. Inf. Sci. 2016, 369, 388–401. [Google Scholar] [CrossRef]
- Aghabozorgi, S.; Shirkhorshidi, A.S.; Wah, T.Y. Time-series clustering–a decade review. Inf. Syst. 2015, 53, 16–38. [Google Scholar] [CrossRef]
- Eigen, M.; Schuster, P. A principle of natural self-organization. Naturwissenschaften 1977, 64, 541–565. [Google Scholar] [CrossRef] [PubMed]
- Kohonen, T. Exploration of very large databases by self-organizing maps. In Proceedings of the International Conference on Neural Networks (icnn’97), Houston, TX, USA, 9–12 June 1997; Volume 1, pp. PL1–PL6. [Google Scholar]
- Hebb, D.O. The first stage of perception: Growth of the assembly. Organ. Behav. 1949, 4, 60–78. [Google Scholar]
- Kleyko, D.; Osipov, E.; De Silva, D.; Wiklund, U.; Alahakoon, D. Integer self-organizing maps for digital hardware. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 June 2019; pp. 1–8. [Google Scholar]
- Gowgi, P.; Garani, S.S. Temporal self-organization: A reaction–diffusion framework for spatiotemporal memories. IEEE Trans. Neural Netw. Learn. Syst. 2018, 30, 427–448. [Google Scholar] [CrossRef]
- Du, Y.; Yuan, C.; Li, B.; Hu, W.; Maybank, S. Spatio-temporal self-organizing map deep network for dynamic object detection from videos. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5475–5484. [Google Scholar]
- Nawaratne, R.; Adikari, A.; Alahakoon, D.; De Silva, D.; Chilamkurti, N. Recurrent Self-Structuring Machine Learning for Video Processing using Multi-Stream Hierarchical Growing Self-Organizing Maps. Multimed. Tools Appl. 2020, 79, 16299–16317. [Google Scholar] [CrossRef]
- Peuquet, D.J. Representations of Space and Time; Guilford Press: New York, NY, USA, 2002. [Google Scholar]
- Aleksander, I.; Taylor, J. Temporal knowledge in locations of activations in a self-organizing map. Trans. Neural Netw. 1991, 2, 458–461. [Google Scholar]
- Hagenauer, J.; Helbich, M. Hierarchical self-organizing maps for clustering spatiotemporal data. Int. J. Geogr. Inf. Sci. 2013, 27, 2026–2042. [Google Scholar] [CrossRef]
- Ultsch, A. Self-organizing neural networks for visualization and classification. In Information and Classification; Springer: Berlin/Heidelberg, Germany, 1993; pp. 307–313. [Google Scholar]
- Neagoe, V.E.; Ropot, A.D. Concurrent self-organizing maps for pattern classification. In Proceedings of the First IEEE International Conference on Cognitive Informatics, Calgary, AB, Canada, 19–20 August 2002; pp. 304–312. [Google Scholar]
- Astel, A.; Tsakovski, S.; Barbieri, P.; Simeonov, V. Comparison of self-organizing maps classification approach with cluster and principal components analysis for large environmental data sets. Water Res. 2007, 41, 4566–4578. [Google Scholar] [CrossRef]
- Kempitiya, T.; Sierla, S.; De Silva, D.; Yli-Ojanperä, M.; Alahakoon, D.; Vyatkin, V. An Artificial Intelligence framework for bidding optimization with uncertainty in multiple frequency reserve markets. Appl. Energy 2020, 280, 115918. [Google Scholar] [CrossRef]
- Fan, D.; Sharad, M.; Sengupta, A.; Roy, K. Hierarchical temporal memory based on spin-neurons and resistive memory for energy-efficient brain-inspired computing. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 1907–1919. [Google Scholar] [CrossRef]
- Zyarah, A.M.; Kudithipudi, D. Neuromorphic architecture for the hierarchical temporal memory. arXiv 2018, arXiv:1808.05839. [Google Scholar] [CrossRef]
- Walter, F.; Sandner, M.; Rcöhrbein, F.; Knoll, A. Towards a neuromorphic implementation of hierarchical temporal memory on SpiNNaker. In Proceedings of the 2017 IEEE International Symposium on Circuits and Systems (ISCAS), Baltimore, MD, USA, 28–31 May 2017; pp. 1–4. [Google Scholar]
- Li, W.; Franzon, P. Hardware implementation of hierarchical temporal memory algorithm. In Proceedings of the 2016 29th IEEE International System-on-Chip Conference (SOCC), Seattle, WA, USA, 6–9 September 2016; pp. 133–138. [Google Scholar]
- Hawkins, J.; Ahmad, S. Why neurons have thousands of synapses, a theory of sequence memory in neocortex. Front. Neural Circuits 2016, 10, 23. [Google Scholar] [CrossRef] [PubMed]
- Kanerva, P. Hyperdimensional computing: An introduction to computing in distributed representation with high-dimensional random vectors. Cogn. Comput. 2009, 1, 139–159. [Google Scholar] [CrossRef]
- Kleyko, D.; Rahimi, A.; Rachkovskij, D.A.; Osipov, E.; Rabaey, J.M. Classification and recall with binary hyperdimensional computing: Tradeoffs in choice of density and mapping characteristics. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5880–5898. [Google Scholar] [CrossRef]
- Kleyko, D.; Osipov, E.; Senior, A.; Khan, A.I.; Şekerciogğlu, Y.A. Holographic graph neuron: A bioinspired architecture for pattern processing. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 1250–1262. [Google Scholar] [CrossRef]
- Bandaragoda, T.; De Silva, D.; Kleyko, D.; Osipov, E.; Wiklund, U.; Alahakoon, D. Trajectory clustering of road traffic in urban environments using incremental machine learning in combination with hyperdimensional computing. In Proceedings of the 2019 IEEE intelligent transportation systems conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1664–1670. [Google Scholar]
- Kleyko, D.; Osipov, E. Brain-like classifier of temporal patterns. In Proceedings of the 2014 International Conference on Computer and Information Sciences (ICCOINS), Kuala Lumpur, Malaysia, 3–5 June 2014; pp. 1–6. [Google Scholar]
- Gallant, S.I.; Culliton, P. Positional binding with distributed representations. In Proceedings of the 2016 International Conference on Image, Vision and Computing (ICIVC), Portsmouth, UK, 3–5 August 2016; pp. 108–113. [Google Scholar]
- Plate, T.A. Holographic Reduced Representation: Distributed Representation for Cognitive Structures; Center for the Study of Language and Inf: Stanford, CA, USA, 2003. [Google Scholar]
- Gallant, S.I.; Okaywe, T.W. Representing objects, relations, and sequences. Neural Comput. 2013, 25, 2038–2078. [Google Scholar] [CrossRef] [PubMed]
- Anderson, J.R. Learning and Memory: An Integrated Approach; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2000. [Google Scholar]
- Hancock, E.; Pelillo, M. Similarity-Based Pattern Recognition; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Schuldt, C.; Laptev, I.; Caputo, B. Recognizing human actions: A local SVM approach. In Proceedings of the ICPR 2004, 17th International Conference on Pattern Recognition, Cambridge, UK, 23–26 August 2004; Volume 3, pp. 32–36. [Google Scholar]
- da Silva, M.V.; Marana, A.N. Human action recognition using 2D poses. In Proceedings of the 2019 8th Brazilian Conference on Intelligent Systems (BRACIS), Salvador, Brazil, 15–18 October 2019; pp. 747–752. [Google Scholar]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.E.; Sheikh, Y. OpenPose: Realtime multi-person 2D pose estimation using Part Affinity Fields. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 172–186. [Google Scholar] [CrossRef]
- Hoan, N.Q. Improving feature map quality of SOM based on adjusting the neighborhood function. Int. J. Comput. Sci. Inf. Secur. (IJCSIS) 2016, 14, 89233. [Google Scholar]
- Yang, Y.; Saleemi, I.; Shah, M. Discovering motion primitives for unsupervised grouping and one-shot learning of human actions, gestures, and expressions. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 35, 1635–1648. [Google Scholar] [CrossRef] [PubMed]
- Peng, B.; Lei, J.; Fu, H.; Zhang, C.; Chua, T.S.; Li, X. Unsupervised video action clustering via motion-scene interaction constraint. IEEE Trans. Circuits Syst. Video Technol. 2018, 30, 131–144. [Google Scholar] [CrossRef]
- Harris, R.S. Improved Pairwise Alignment of Genomic DNA; The Pennsylvania State University: State College, PA, USA, 2007. [Google Scholar]
- Bacciu, D.; Gallicchio, C.; Micheli, A.; Chessa, S.; Barsocchi, P. Predicting user movements in heterogeneous indoor environments by reservoir computing. In Proceedings of the IJCAI Workshop on Space, Time and Ambient Intelligence (STAMI), Barcellona, Spain, 16–22 July 2011; pp. 1–6. [Google Scholar]
- Cui, Y.; Ahmad, S.; Hawkins, J. Continuous online sequence learning with an unsupervised neural network model. Neural Comput. 2016, 28, 2474–2504. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, S.; Lavin, A.; Purdy, S.; Agha, Z. Unsupervised real-time anomaly detection for streaming data. Neurocomputing 2017, 262, 134–147. [Google Scholar] [CrossRef]
- Tang, Y. Big data analytics of taxi operations in New York City. Am. J. Oper. Res. 2019, 9, 192–199. [Google Scholar] [CrossRef]
- Vilone, G.; Longo, L. Explainable artificial intelligence: A systematic review. arXiv 2020, arXiv:2006.00093. [Google Scholar]
- Ables, J.; Kirby, T.; Anderson, W.; Mittal, S.; Rahimi, S.; Banicescu, I.; Seale, M. Creating an Explainable Intrusion Detection System Using Self Organizing Maps. arXiv 2022, arXiv:2207.07465. [Google Scholar]
- Jayaratne, M.; Alahakoon, D.; De Silva, D. Unsupervised skill transfer learning for autonomous robots using distributed growing self organizing maps. Robot. Auton. Syst. 2021, 144, 103835. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Approach | Method | Acc |
|---|---|---|
| Yang et al. (2013) [53] | Unsupervised | 91.0 |
| Peng et al. (2018) [54] | Unsupervised | 83.4 |
| Proposed ST-SOM | Unsupervised | 86.6 |
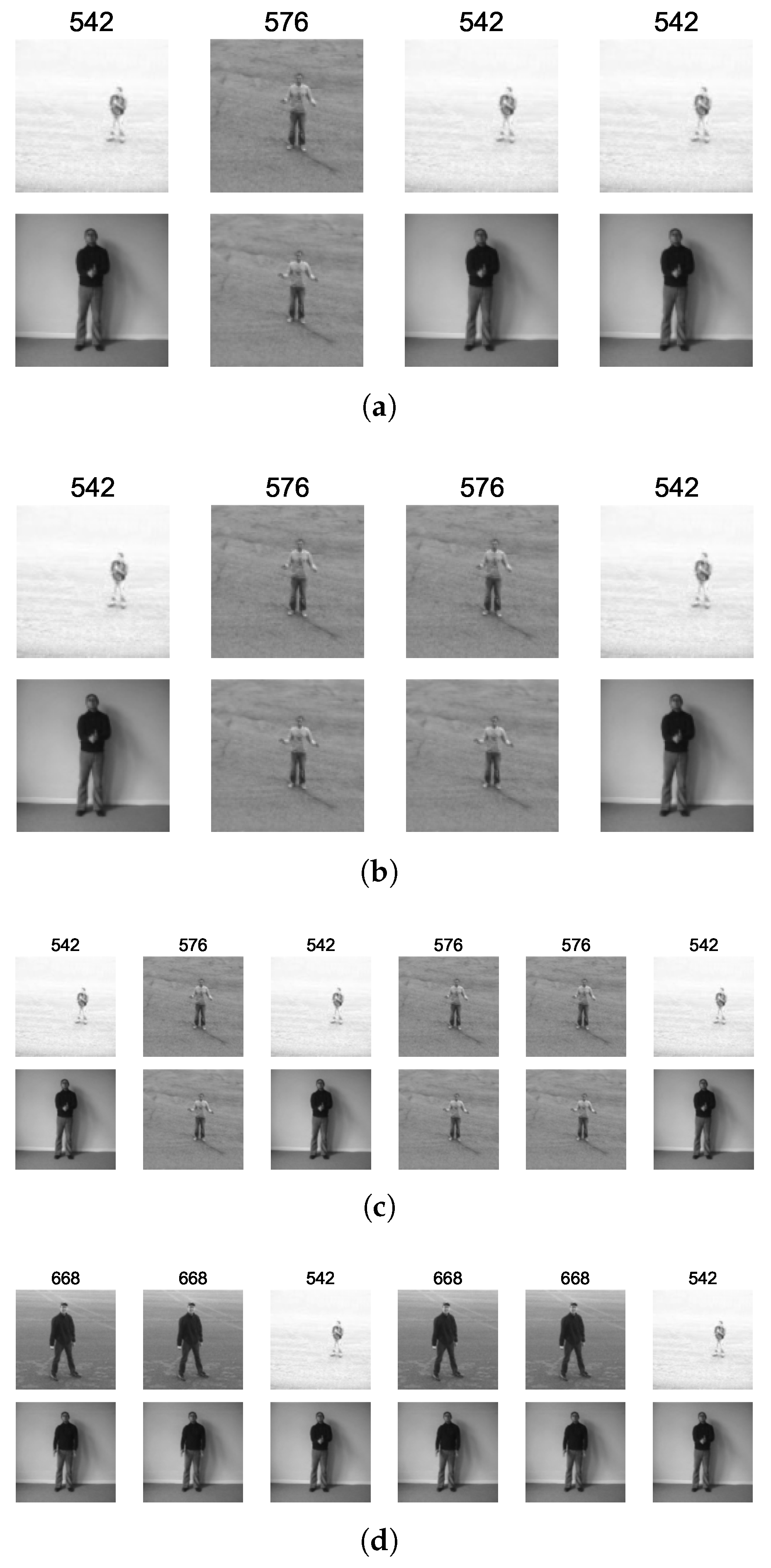
| Cluster Node | Selected Sequences |
|---|---|
| (0, 19) | 542, 576, 542, 542 |
| (0, 18) | 542, 576, 576, 542 |
| (0, 12) | 542, 576, 542, 576, 576, 542 |
| (3, 15) | 668, 668, 542, 668, 668, 542 |
| Approach | Method | Acc |
|---|---|---|
| D. Bacciu et al. (2011) [56] | Supervised | 89.5 |
| Ours | Unsupervised | 87.3 |
| Hyperparameter | Value |
|---|---|
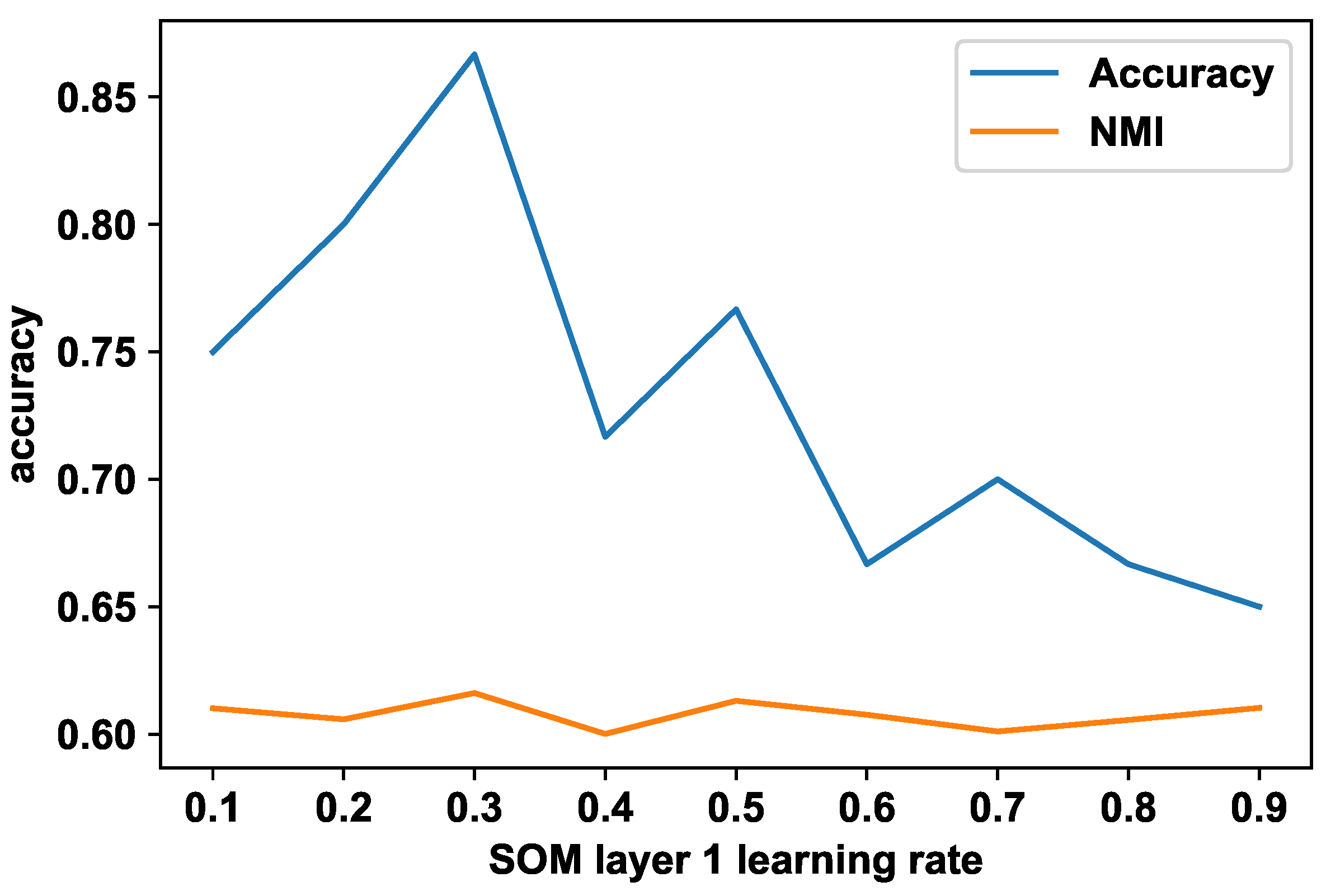
| First-layer learning rate | 0.1 |
| Second-layer learning rate | 0.5 |
| Number of iterations | 100 |
| Dataset | HTM | Spatio-Temporal-SOM |
|---|---|---|
| Taxi passenger | 0.217 | 0.119 1 |
| CPU usage | 0.175 | 0.109 1 |
| Machine temperature | 0.0197 | 0.0192 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kempitiya, T.; Alahakoon, D.; Osipov, E.; Kahawala, S.; De Silva, D. A Two-Layer Self-Organizing Map with Vector Symbolic Architecture for Spatiotemporal Sequence Learning and Prediction. Biomimetics 2024, 9, 175. https://0-doi-org.brum.beds.ac.uk/10.3390/biomimetics9030175
Kempitiya T, Alahakoon D, Osipov E, Kahawala S, De Silva D. A Two-Layer Self-Organizing Map with Vector Symbolic Architecture for Spatiotemporal Sequence Learning and Prediction. Biomimetics. 2024; 9(3):175. https://0-doi-org.brum.beds.ac.uk/10.3390/biomimetics9030175
Chicago/Turabian StyleKempitiya, Thimal, Damminda Alahakoon, Evgeny Osipov, Sachin Kahawala, and Daswin De Silva. 2024. "A Two-Layer Self-Organizing Map with Vector Symbolic Architecture for Spatiotemporal Sequence Learning and Prediction" Biomimetics 9, no. 3: 175. https://0-doi-org.brum.beds.ac.uk/10.3390/biomimetics9030175