
Robust Multi-Mode Synchronization of Chaotic Fractional Order Systems in the Presence of Disturbance, Time Delay and Uncertainty with Application in Secure Communications


Abstract
:1. Introduction
- (1)
- Synchronization, despite the stepwise changes of system parameters.
- (2)
- Determination of control rule as an explicit and continuous function that prohibits the manifestation of chattering phenomenon.
- (3)
- Synchronization is independent of the type of chaotic system.
- (4)
- Determination of several adaptive rules such that the system stability is guaranteed and the convergence of synchronization errors and estimating errors of disturbance and uncertainty boundaries converge to zero.
- (5)
- A novel secure communication design was considered the modulation function for chaotic masking.
2. Problem Formulation
2.1. Basic Definitions
Fractional-Order Derivative
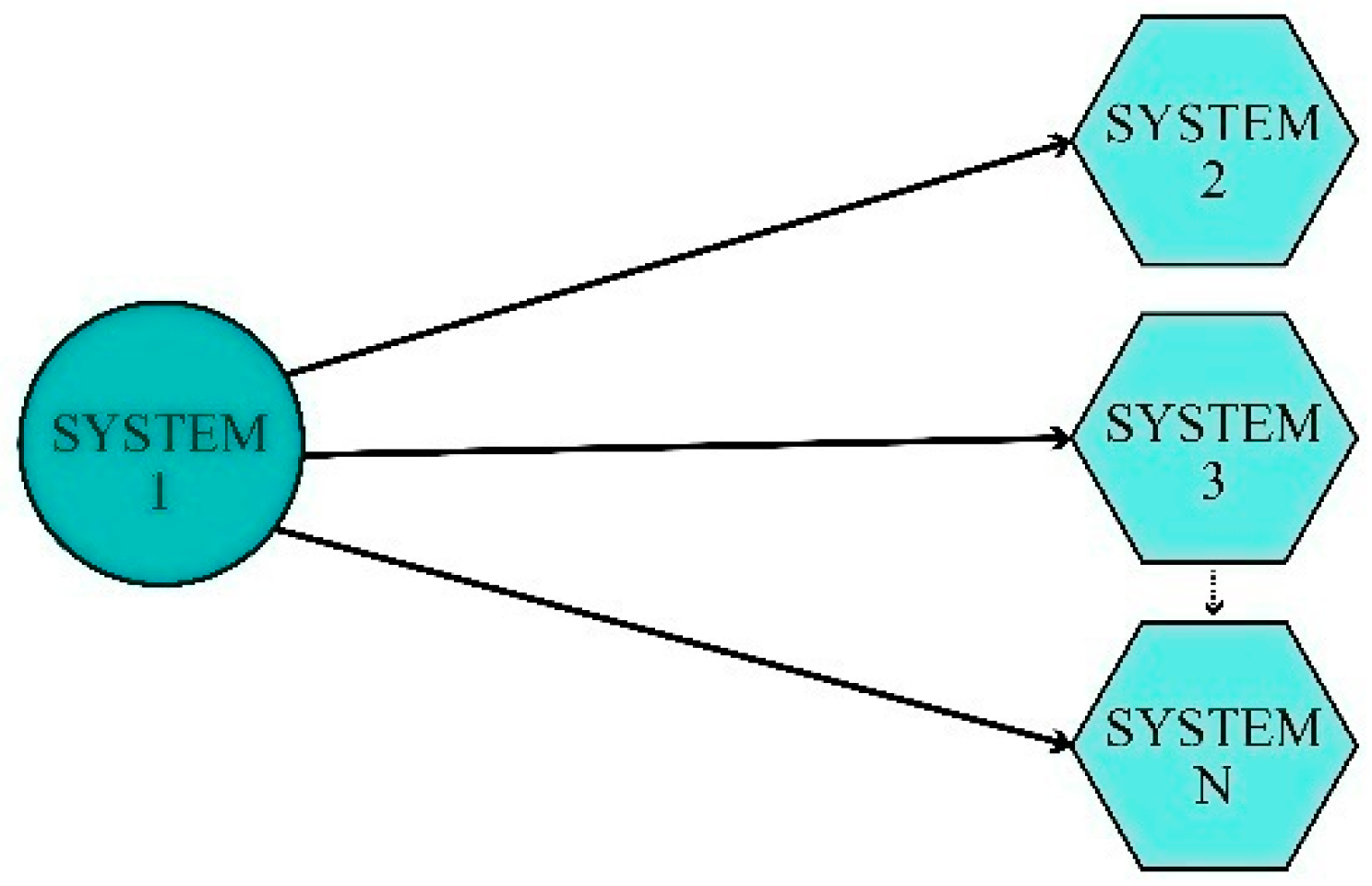
2.2. Adaptive Synchronization between One Drive System and Several Response Systems
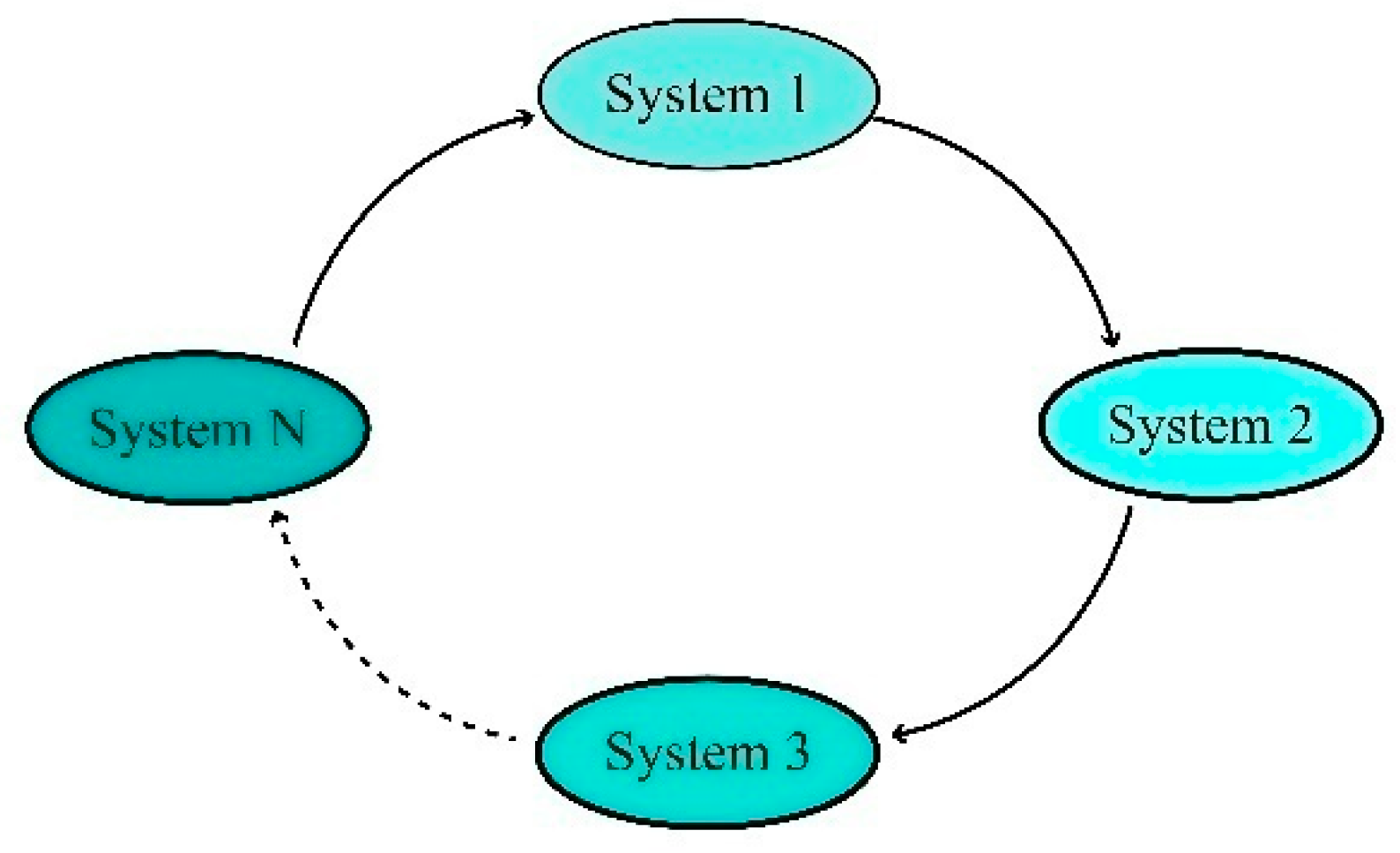
2.3. Adaptive Circular Multimode Synchronization of Chaotic Systems
2.4. Synchronization in the Presence of Disturbance, Time Delay and Uncertainty in the Systems
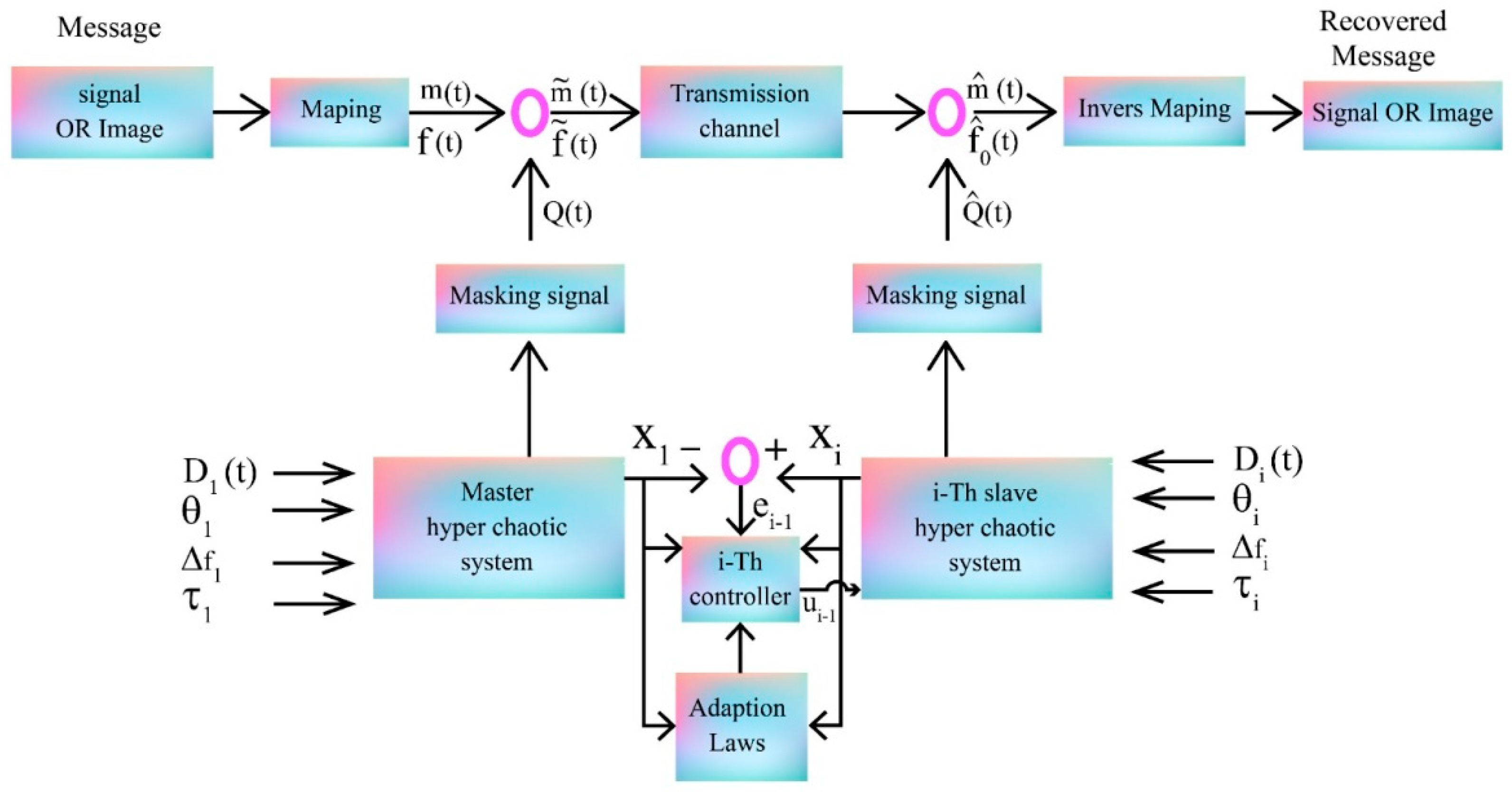
3. Application in Secure Communication Based on Mapping and Chaotic Masking
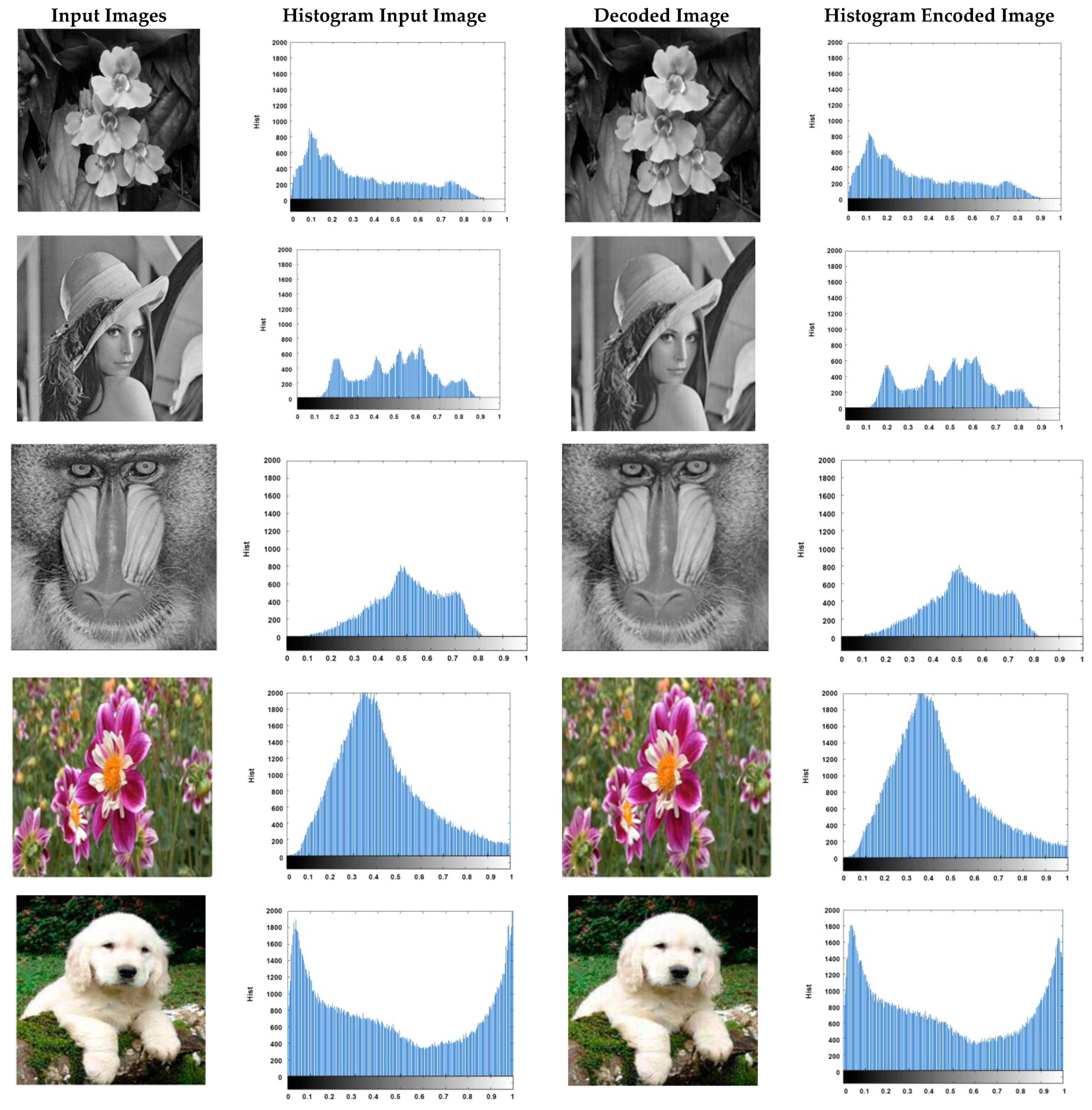
4. Simulation and Results
5. Experiment Results
6. Discussion, Advantages and Disadvantages, and Future Works
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rosset, C.; Rosset, A.; Ratib, O. General consumer communication tools for improved image management and communication in medicine. J. Digit. Imaging 2005, 18, 270–279. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ratib, O.; Ligier, Y.; Scherrer, J.R. Digital image management and communication in medicine. Comput. Med. Imaging Graph. 1994, 18, 73–84. [Google Scholar] [CrossRef]
- Saadaoui, S.; Tabaa, M.; Monteiro, F.; Chehaitly, M.; Dandache, A. Discrete wavelet packet transform-based industrial digital wireless communication systems. Information 2019, 10, 104. [Google Scholar] [CrossRef] [Green Version]
- Safi, S.; Thiessen, T.; Schmailzl, K.J. Acceptance and resistance of new digital technologies in medicine: Qualitative study. JMIR Res. Protoc. 2018, 7, e11072. [Google Scholar] [CrossRef]
- Nabutovsky, I.; Nachshon, A.; Klempfner, R.; Shapiro, Y.; Tesler, R. Digital cardiac rehabilitation programs: The future of patient-centered medicine. Telemed. E-Health 2020, 26, 34–41. [Google Scholar] [CrossRef] [Green Version]
- Meinel, C.; Sack, H. Digital Communication: Communication, Multimedia, Security; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Nie, J.; Hu, X. Mobile banking information security and protection methods. In Proceedings of the 2008 International Conference on Computer Science and Software Engineering, Washington, DC, USA, 12–14 December 2008; IEEE: Piscataway, NJ, USA; Volume 3, pp. 587–590. [Google Scholar]
- Nemati, H.R.; Yang, L. (Eds.) Applied Cryptography for Cyber Security and Defense: Information Encryption and Cyphering: Information Encryption and Cyphering; I.G.I. Global: Pennsylvania, PA, USA, 2010. [Google Scholar]
- Mahmoud, M.S.B.; Pirovano, A.; Larrieu, N. Aeronautical communication transition from analog to digital data: A network security survey. Comput. Sci. Rev. 2014, 11, 1–29. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, Y.; Yi, W.; Nie, C. The methods of digital communication system chaotic encryption using the Duffing oscillator. In Proceedings of the 7th International Conference on Signal Processing, Beijing, China, 31 August–4 September 2004; IEEE: Piscataway, NJ, USA; Volume 3, pp. 1845–1848. [Google Scholar]
- Liu, Z.; Saberi, A.; Stoorvogel, A.A.; Nojavanzadeh, D. Global regulated state synchronization for homogeneous networks of non-introspective agents in presence of input saturation: Scale-free nonlinear and linear protocol designs. Automatica 2020, 119, 109041. [Google Scholar] [CrossRef]
- Zheng, C.D.; Zhang, L. On synchronization of competitive memristor-based neural networks by nonlinear control. Neurocomputing 2020, 410, 151–160. [Google Scholar] [CrossRef]
- Bulut, G.G.; GÜler, H. Fuzzy Based Chaotic Synchronization of Chen Systems. In Proceedings of the 2019 1st Global Power, Energy and Communication Conference (GPECOM), Nevsehir, Turkey, 12–15 June 2019; IEEE: Piscataway, NJ, USA; pp. 30–34. [Google Scholar]
- Bhalekar, S.; Daftardar-Gejji, V. Synchronization of different fractional order chaotic systems using active control. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3536–3546. [Google Scholar] [CrossRef]
- Mahmoud, G.M.; Arafa, A.A.; Mahmoud, E.E. On phase and anti-phase combination synchronization of time delay nonlinear systems. J. Comput. Nonlinear Dyn. 2018, 13. [Google Scholar] [CrossRef]
- Yu, J.; Chen, B.; Yu, H.; Gao, J. Adaptive fuzzy tracking control for the chaotic permanent magnet synchronous motor drive system via backstepping. Nonlinear Anal. Real World Appl. 2011, 12, 671–681. [Google Scholar] [CrossRef]
- Yadav, V.K.; Srivastava, M.; Das, S. Backstepping Control for Combined Function Projective Synchronization among Fractional Order Chaotic Systems with Uncertainties and External Disturbances. In Nonlinear Dynamical Systems with Self-Excited and Hidden Attractors; Springer: Cham, Switzerland, 2018; pp. 115–132. [Google Scholar]
- Yu, J.; Le, J.; Liu, D. Synchronization of chaotic system with adaptive transfer function sliding mode method. Optik 2017, 130, 1053–1072. [Google Scholar] [CrossRef]
- Yao, Q. Synchronization of second-order chaotic systems with uncertainties and disturbances using fixed-time adaptive sliding mode control. Chaos Solitons Fractals 2020, 142, 110372. [Google Scholar] [CrossRef]
- Luo, R.; Su, H.; Zeng, Y. Synchronization of uncertain fractional-order chaotic systems via a novel adaptive controller. Chin. J. Phys. 2017, 55, 342–349. [Google Scholar] [CrossRef]
- Lai, Q.; Wan, Z.; Zhang, H. Design and Analysis of Multi scroll Memristive Hopfield Neural Network with Adjustable Memductance and Application to Image encryption. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef]
- Lai, Q.; Norouzi, B.; Liu, F. Dynamic analysis, circuit realization, control design and image encryption application of an extended Lü system with coexisting attractors. Chaos Solitons Fractals 2018, 114, 230–245. [Google Scholar] [CrossRef]
- Lai, Q.; Lai, C.; Zhang, H.; Li, C. Hidden coexisting hyper-chaos of new memristive neuron model and its application in image encryption. Chaos Solitons Fractals 2022, 158, 112017. [Google Scholar] [CrossRef]
- Mboupda Pone, J.R.; Kingni, S.T.; Kol, G.R.; Pham, V.T. Hopf bifurcation, anti-monotonicity and amplitude controls in the chaotic Toda jerk oscillator: Analysis, circuit realization and combination synchronization in its fractional-order form. Automatika 2019, 60, 149–161. [Google Scholar] [CrossRef]
- Bhat, M.A.; Khan, A. Multi-switching combination synchronization of different fractional-order non-linear dynamical systems. Int. J. Model. Simul. 2018, 38, 254–261. [Google Scholar] [CrossRef]
- Alam, Z.; Yuan, L.; Yang, Q. Chaos and combination synchronization of a new fractional-order system with two stable node-foci. IEEE/CAA J. Autom. Sin. 2016, 3, 157–164. [Google Scholar]
- Yadav, V.K.; Kumar, R.; Leung, A.Y.T.; Das, S. Dual phase and dual anti-phase synchronization of fractional order chaotic systems in real and complex variables with uncertainties. Chin. J. Phys. 2019, 57, 282–308. [Google Scholar] [CrossRef]
- Li, B.; Zhou, X.; Wang, Y. Combination synchronization of three different fractional-order delayed chaotic systems. Complexity 2019, 2019, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.; Bhat, M.A. Multi-switching combination–combination synchronization of non-identical fractional-order chaotic systems. Math. Methods Appl. Sci. 2017, 40, 5654–5667. [Google Scholar] [CrossRef]
- Khan, A.; Nigar, U. Sliding mode disturbance observer control based on adaptive hybrid projective compound combination synchronization in fractional-order chaotic systems. J. Control Autom. Electr. Syst. 2020, 31, 885–899. [Google Scholar] [CrossRef]
- Kekha Javan, A.A.; Shoeibi, A.; Zare, A.; Hosseini Izadi, N.; Jafari, M.; Alizadehsani, R.; Moridian, P.; Mosavi, A.; Acharya, U.R.; Nahavandi, S. Design of Adaptive-Robust Controller for Multi-State Synchronization of Chaotic Systems with Unknown and Time-Varying Delays and Its Application in Secure Communication. Sensors 2021, 21, 254. [Google Scholar] [CrossRef] [PubMed]
- Khan, A.; Jahanzaib, L.S.; Trikha, P. Changing dynamics of the first, second and third approximations of the exponential chaotic system and their application in secure communication using synchronization. Int. J. Appl. Comput. Math. 2021, 7, 1–26. [Google Scholar] [CrossRef]
- Mohadeszadeh, M.; Pariz, N. An application of adaptive synchronization of uncertain chaotic system in secure communication systems. Int. J. Model. Simul. 2021, 42, 143–152. [Google Scholar] [CrossRef]
- Khan, A.; Trikha, P.; Jahanzaib, L.S. Secure communication: Using synchronization on a novel fractional order chaotic system. In Proceedings of the 2019 International Conference on Power Electronics, Control and Automation (ICPECA), New Delhi, India, 16–17 November 2019; IEEE: Piscataway, NJ, USA; pp. 1–5. [Google Scholar]
- Balamash, A.S.; Bettayeb, M.; Djennoune, S.; Al-Saggaf, U.M.; Moinuddin, M. Fixed-time terminal synergetic observer for synchronization of fractional-order chaotic systems. Chaos Interdiscip. J. Nonlinear Sci. 2020, 30, 073124. [Google Scholar] [CrossRef]
- Khan, A.; Jahanzaib, L.S.; Khan, T.; Trikha, P. Secure Communication: Using Fractional Matrix Projective Combination Synchronization. Available online: https://aip.scitation.org/doi/10.1063/5.0018974 (accessed on 28 April 2022).
- Houmor, T.; Zerimeche, H.; Berkane, A. A secure communication Scheme based on adaptive modified projective combination synchronization of fractional-order hyper-chaotic systems. In Proceedings of the 9th (Online) International Conference on Applied Analysis and Mathematical Modeling (ICAAMM21), Istanbul, Turkey, 11–13 June 2021; p. 73. [Google Scholar]
- Babu, N.R.; Kalpana, M.; Balasubramaniam, P. A novel audio encryption approach via finite-time synchronization of fractional order hyperchaotic system. Multimed. Tools Appl. 2021, 80, 18043–18067. [Google Scholar] [CrossRef]
- Vaseghi, B.; Mobayen, S.; Hashemi, S.S.; Fekih, A. Fast reaching finite time synchronization approach for chaotic systems with application in medical image encryption. IEEE Access 2021, 9, 25911–25925. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Chen, W.; Dai, H.; Song, Y.; Zhang, Z. Convex Lyapunov functions for stability analysis of fractional order systems. IET Control Theory Appl. 2017, 11, 1070–1074. [Google Scholar] [CrossRef]
- Matignon, D. Stability results for fractional differential equations with applications to control processing. Comput. Eng. Syst. Appl. 1996, 2, 963–968. [Google Scholar]
- Chen, X.; Park, J.H.; Cao, J.; Qiu, J. Sliding mode synchronization of multiple chaotic systems with uncertainties and disturbances. Appl. Math. Comput. 2017, 308, 161–173. [Google Scholar] [CrossRef]
- Hegazi, A.S.; Matouk, A.E. Dynamical behaviors and synchronization in the fractional order hyper-chaotic Chen system. Appl. Math. Lett. 2011, 24, 1938–1944. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.; Panna, B.; Jha, R.K. Medical image encryption using fractional discrete cosine transform with chaotic function. Med. Biol. Eng. Comput. 2019, 57, 2517–2533. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Tang, S.; Lian, J.; Ma, Y.; Zhang, X. A novel fourth order chaotic system and its algorithm for medical image encryption. Multidimens. Syst. Signal. Process. 2019, 30, 1637–1657. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Podlubny, I. Stability of fractional-order nonlinear dynamic systems: Lyapunov direct method and generalized Mittag–Leffler stability. Comput. Math. Appl. 2010, 59, 1810–1821. [Google Scholar] [CrossRef] [Green Version]
- Platas-Garza, M.A.; Zambrano-Serrano, E.; Rodríguez-Cruz, J.R.; Posadas-Castillo, C. Implementation of an encrypted-compressed image wireless transmission scheme based on chaotic fractional-order systems. Chin. J. Phys. 2021, 71, 22–37. [Google Scholar] [CrossRef]
- Mahmoud, E.E.; Jahanzaib, L.S.; Trikha, P.; Alkinani, M.H. Anti-synchronized quad-compound combination among parallel systems of fractional chaotic system with application. Alex. Eng. J. 2020, 59, 4183–4200. [Google Scholar] [CrossRef]
- Peng, Z.; Yu, W.; Wang, J.; Wang, J.; Chen, Y.; He, X.; Jiang, D. Dynamic analysis of seven-dimensional fractional-order chaotic system and its application in encrypted communication. J. Ambient. Intell. Humaniz. Comput. 2020, 11, 5399–5417. [Google Scholar] [CrossRef]
- Jahanzaib, L.S.; Trikha, P.; Baleanu, D. Analysis and application using quad compound combination anti-synchronization on novel fractional-order chaotic system. Arab. J. Sci. Eng. 2021, 46, 1729–1742. [Google Scholar] [CrossRef]
- Ibraheem, A. Multi-switching dual combination synchronization of time delay dynamical systems for fully unknown parameters via adaptive control. Arab. J. Sci. Eng. 2020, 45, 6911–6922. [Google Scholar] [CrossRef]
- Li, Y.; Li, C. Complete synchronization of delayed chaotic neural networks by intermittent control with two switches in a control period. Neurocomputing 2016, 173, 1341–1347. [Google Scholar] [CrossRef]
- Kim, J.; Jin, M. Synchronization of chaotic systems using particle swarm optimization and time-delay estimation. Nonlinear Dyn. 2016, 86, 2003–2015. [Google Scholar] [CrossRef]
- Guo, J.; Ma, C.; Wang, Z.; Zhang, F. Time-Delay Characteristics of Complex Lü System and Its Application in Speech Communication. Entropy 2020, 22, 1260. [Google Scholar] [CrossRef] [PubMed]
- Jahanshahi, H.; Sajjadi, S.S.; Bekiros, S.; Aly, A.A. On the development of variable-order fractional hyper-chaotic economic system with a nonlinear model predictive controller. Chaos Solitons Fractals 2021, 144, 110698. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images | Histogram | Correlation | Differential Attack | PSNR | Information Entropy | |||
|---|---|---|---|---|---|---|---|---|
| Main | Encrypted | Decoded | NPCR (%) | UACI (%) | ||||
| Image 1 | 36,233.046875 | 10,278,639.63281 | 35,454.91406 | 0.9996 | 99.99 | 33.46 | 43.1049 | 7.590 |
| Image 2 | 40,953.960938 | 10,271,802.38281 | 40,603.99218 | 0.9993 | 99.98 | 33.55 | 42.8879 | 7.435 |
| Image 3 | 61,975.74210 | 10,270,160.96093 | 70,547.03900 | 0.9989 | 99.69 | 33.16 | 43.0529 | 7.210 |
| Image 4 | 75,071.242188 | 3,805,961.023438 | 75,522.007813 | 0.9996 | 99.61 | 33.46 | 45.7973 | 7.421 |
| Image 5 | 17,756.507813 | 3,806,198.531250 | 17,534.671875 | 0.9998 | 99.92 | 33.47 | 43.9077 | 7.822 |
| Reference | Dataset | Types of Data | Encryption Method | Details Encryption Method | Type of Delay | Details of Method | |
|---|---|---|---|---|---|---|---|
| Unknown Parameters | Disturbance | ||||||
| [30] | sinusoids signal | - | Fractional-Order Chaotic Systems | Genesio–Tesi system | ✕ | ✕ | √ |
| [31] | Voltage signal | - | Fractional-Order Chaotic Systems | Seven-dimensional fractional-order chaotic system | ✕ | ✕ | ✕ |
| [32] | sinusoids signal | - | Fractional-Order Chaotic Systems | Exponential Chaotic System | ✕ | ✕ | ✕ |
| [33] | sinusoids signal | - | Fractional-Order Chaotic Systems | FO complex chaotic Lü system | ✕ | ✕ | ✕ |
| [34] | sinusoids signal | - | Fractional-Order Chaotic Systems | A Novel Fractional Order Chaotic System | ✕ | ✕ | ✕ |
| [35] | square signal | - | fractional-order chaotic systems | Chua system | ✕ | ✕ | ✕ |
| [36] | sinusoids signal | - | fractional-order chaotic systems | Fractional chaotic T system via matrix projective | ✕ | √ | √ |
| [37] | sinusoids signal | - | fractional-order chaotic systems | fractional-order Chen and lu hyper-chaotic systems | ✕ | √ | ✕ |
| [39] | Benchmark and Medical Image | Color images | Integer-order chaotic systems | Fast Reaching Finite Time synchronization | ✕ | ✕ | √ |
| [50] | Benchmark Images | Color images | Fractional order system | Fractional Order Chaotic Systems | ✕ | ✕ | ✕ |
| [51] | Benchmark Images | Gray Scale Images | Fractional order system | Fractional-Order Simplest Chaotic | ✕ | ✕ | ✕ |
| [52] | - | - | - | - | Constant-known | √ | ✕ |
| [53] | - | - | - | - | Constant-known | ✕ | ✕ |
| [54] | - | sine signal | - | chaotic masking | Time varying-known | √ | √ |
| [55] | “Travelling” music in Matlab | speech signal | complex Lü systems | self-time-delay synchronization and chaotic masking | constant-known | ✕ | ✕ |
| Proposed method | Benchmarks Images | Gray Scale & color Images | Fractional order system | Multi-Mode Synchronization of Fractional-Order Chaotic Systems | Time varying-unknown | √ | √ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kekha Javan, A.A.; Zare, A.; Alizadehsani, R.; Balochian, S. Robust Multi-Mode Synchronization of Chaotic Fractional Order Systems in the Presence of Disturbance, Time Delay and Uncertainty with Application in Secure Communications. Big Data Cogn. Comput. 2022, 6, 51. https://0-doi-org.brum.beds.ac.uk/10.3390/bdcc6020051
Kekha Javan AA, Zare A, Alizadehsani R, Balochian S. Robust Multi-Mode Synchronization of Chaotic Fractional Order Systems in the Presence of Disturbance, Time Delay and Uncertainty with Application in Secure Communications. Big Data and Cognitive Computing. 2022; 6(2):51. https://0-doi-org.brum.beds.ac.uk/10.3390/bdcc6020051
Chicago/Turabian StyleKekha Javan, Ali Akbar, Assef Zare, Roohallah Alizadehsani, and Saeed Balochian. 2022. "Robust Multi-Mode Synchronization of Chaotic Fractional Order Systems in the Presence of Disturbance, Time Delay and Uncertainty with Application in Secure Communications" Big Data and Cognitive Computing 6, no. 2: 51. https://0-doi-org.brum.beds.ac.uk/10.3390/bdcc6020051