Initially Clamped Piezoelectric Inchworm Linear Motor Design Based on Force Amplification Mechanisms for Miniaturized and Large Force Actuation Applications †

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
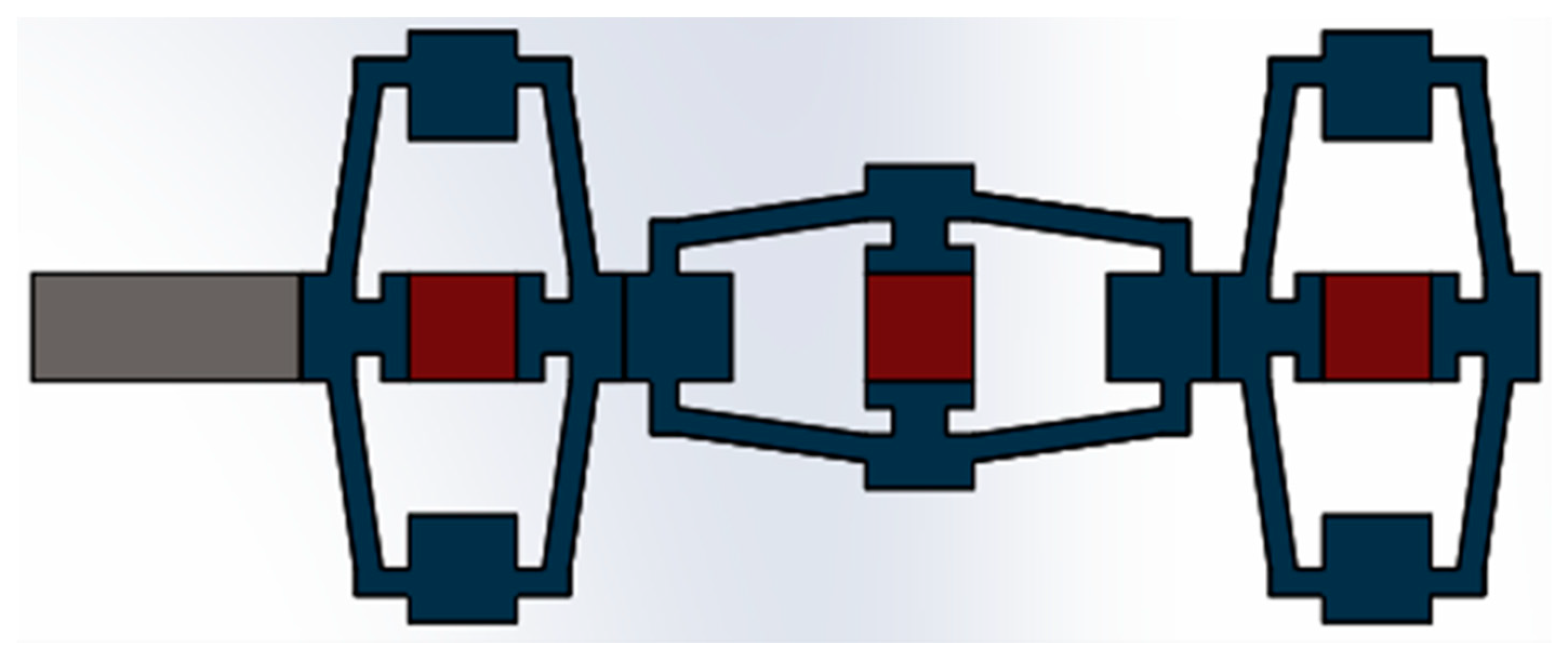
2.1. Structural Design and Operation Concept
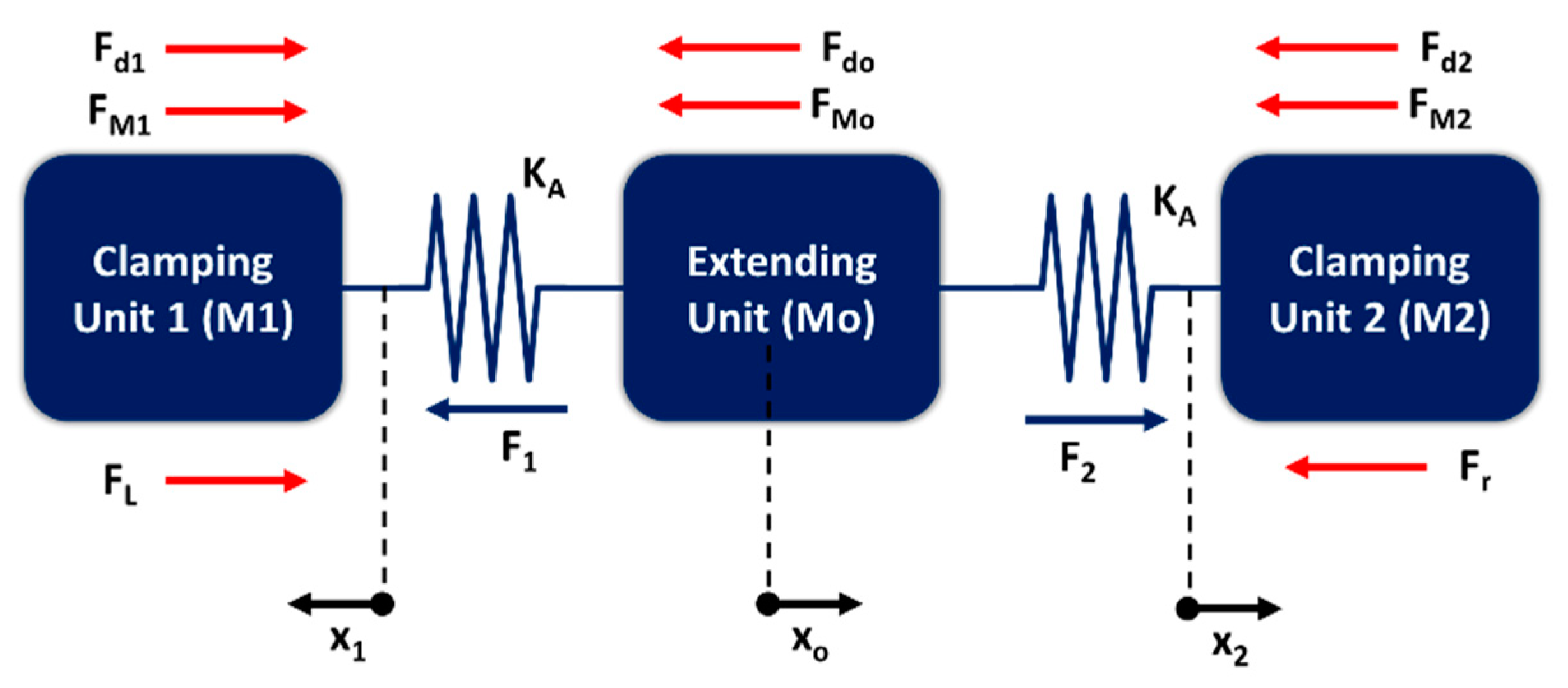
2.2. System Modelling and Boundary Conditions
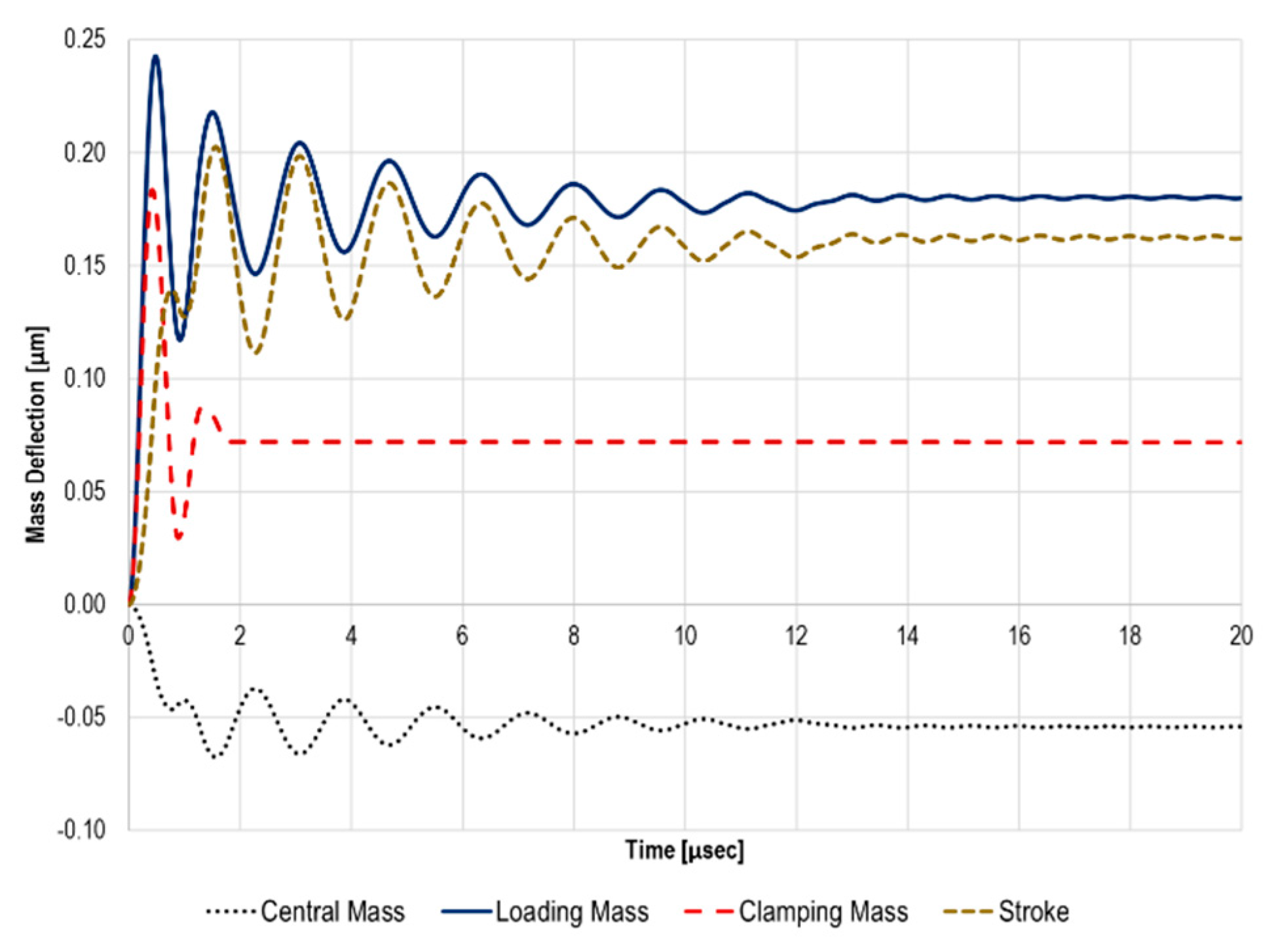
3. Results and Discussion
4. Conclusions
Funding
Conflicts of Interest
References
- Huang, H.; Wang, Y.W. Design and Experimental Research of a Rotary Micro-Actuator Based on a Shearing Piezoelectric Stack. Micromachines 2019, 10, 96. [Google Scholar] [CrossRef] [PubMed]
- Zhao, B.; Fang, R.; Shi, W. Modeling of Motion Characteristics and Performance Analysis of an Ultra Precision Inchworm Motor. Materials 2020, 13, 3976. [Google Scholar] [CrossRef] [PubMed]
- Ma, L.; Jiang, C.; Xiao, J.; Wang, K. Design and Analysis of a Piezoelectric Inchworm Actuator. J. Micro-Bio Robot. 2014, 9, 11–21. [Google Scholar] [CrossRef]
- Chen, X.; Li, M.; Zhang, H.; Lu, Q.; Lyu, S. Improvement on the Structure Design of a Kind of Linear Piezoelectric Motor with Flexible Drive-Foot. Int. J. Precis. Eng. Manuf. 2020, 21, 81–89. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kloub, H. Initially Clamped Piezoelectric Inchworm Linear Motor Design Based on Force Amplification Mechanisms for Miniaturized and Large Force Actuation Applications. Proceedings 2020, 64, 12. https://0-doi-org.brum.beds.ac.uk/10.3390/IeCAT2020-08517
Kloub H. Initially Clamped Piezoelectric Inchworm Linear Motor Design Based on Force Amplification Mechanisms for Miniaturized and Large Force Actuation Applications. Proceedings. 2020; 64(1):12. https://0-doi-org.brum.beds.ac.uk/10.3390/IeCAT2020-08517
Chicago/Turabian StyleKloub, Hussam. 2020. "Initially Clamped Piezoelectric Inchworm Linear Motor Design Based on Force Amplification Mechanisms for Miniaturized and Large Force Actuation Applications" Proceedings 64, no. 1: 12. https://0-doi-org.brum.beds.ac.uk/10.3390/IeCAT2020-08517