Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion †

Department of Electrical & Information Engineering, Covenant University, KM 10, Idiroko Road, Ota 112233, Ogun State, Nigeria
†
Presented at the First International Electronic Conference on Actuator Technology: Materials, Devices and Applications, 23–27 November 2020; Available online: https://iecat2020.sciforum.net/.
Proceedings 2020, 64(1), 3; https://0-doi-org.brum.beds.ac.uk/10.3390/IeCAT2020-08512
Published: 21 November 2020
(This article belongs to the Proceedings of The 1st International Electronic Conference on Actuator Technology: Materials, Devices and Applications)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Shape memory alloys and polymers are a class of smart materials that remember a pre-trained shape or form when exposed to an appropriate temperature. In this work, shape memory alloys consisting of wires, 1-way springs, and 2-way springs are described; an open-loop control of shape memory alloys and polymers is also implemented. Since the amount of electric current that flows through a wire is directly proportional to temperature, control of the electric circuit is used for open-loop temperature control. The designed smart control is applied to rotate a lever mechanism through the conversion of the linear motion of the shape memory alloy (SMA) into the rotational motion of the lever through the tapping of a piezoelectric transducer to deliver the open-loop control. When the piezo transducer is deformed by mechanical stress via tapping, striking, or any other mechanical stimulus, it produces an electrical signal, which when sent to the microelectronic circuit activates the SMA. The implemented system can be applied in robotic systems and autonomous applications.
1. Introduction
Shape memory alloys are able to change their shape when the temperature changes [1]. A length of coiled “memory wire” is straightened when put into hot water. The wire is being heated directly by contact with something hot. Since a shape memory alloy has a relatively high electrical resistance, it can also be made hot by passing an electrical current through it. This shape memory effect has been used in robots, in which the change in shape of a smart wire when a current is passed through it can be used to create movement in a robot arm [2]. When a shape memory wire is used like this, it is also called muscle wire.
Shape memory alloys are made from nickel and titanium and are otherwise called nitinol [3]. Equal amounts of nickel and titanium are combined and melted in an electric furnace at 1300 °C. The process is carried out in a vacuum, and any contamination by other material is strictly avoided. The melt is then cast into small ingots. The ingots are rolled into rod, bar, or sheet form. If wire is required, the bar stock is further drawn down to diameter through very hard dies of decreasing diameter. Finally, the wire is given its memory by carefully controlled heat treatment and “conditioning”. This process is carried out continuously [4]. Training a shape memory alloy involves a complex process of treatment over a number of cycles in which it is deformed, heated, and cooled [5]. After manufacture, nitinol wire exists in two “states” (phases) dependent on temperature:
- Low temperature state in which the material has a martensite crystal structure (“relaxed”, extended condition).
- High temperature state in which the material has an austenite crystal structure (“remembered”, shortened condition).
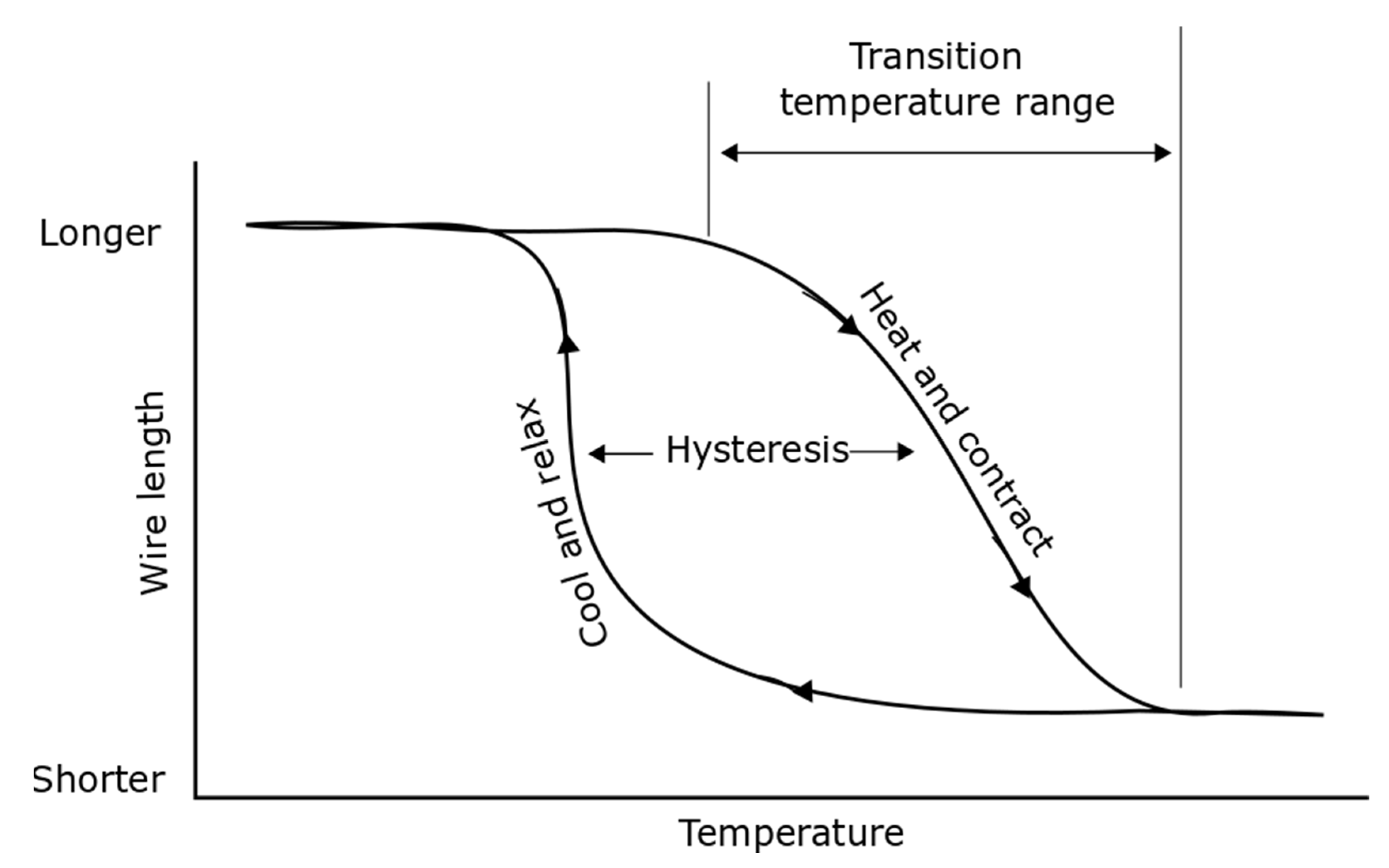
The change from one state or phase to the other, caused by temperature change, is responsible for the changes in length of the wire. The behaviour of the wire can be represented on a graph in Figure 1, showing length against temperature change [5].
When the wire is heated or cooled, the changes of state or phase are not immediate. At 68 °C, the high temperature phase begins and ends at 82 °C. A figure of 70 °C is normally specified for convenience as the effective transition temperature. On cooling down, the low temperature phase begins at 52 °C and ends at 42 °C. This temperature range differs considerably from the first and shows up on the graph as a hysteresis curve. Hysteresis is the retardation or lagging of an effect behind the cause of the effect or the difference between the higher transition temperature and the relaxation temperature [6].
These hysteresis characteristics become important when very rapid responses are required, e.g., the wire can be heated rapidly with a large current, which may then be reduced to maintain it in the shortened condition; if rapid relaxation is required, an active method of cooling such as moving air or immersion in a liquid can be used.
2. Experiments
In this section, experiments were conducted to describe the characteristics of shape memory alloys such as shape memory springs and wires, two-way shape memory alloys, shape memory polymers (SMP), and superelastic alloys.
2.1. Shape Memory Wires
At normal room temperature, a shape memory wire made from nitinol has to be stretched with a bias force of 0.3 N. When heated to the transition temperature of between 70–80 °C, the wire shortens about 5% in length and will exert a pulling force of 1.5 N. SMA wires not only contract when heated, but can be trained to a specific shape or form so that when heated, they morph to a form, but when cooled, they can exist in a different shape or form.
The speed at which the wire shortens when it reaches the transition temperature is about 0.1 s. It takes longer to relax or stretch back to its longer length—about 1 s. When heated, the wire actually starts changing length at 68 °C and finishes at 78 °C. When it cools, the stretching or relaxation does not take place until it has reached 52 °C as a result of hysteresis.
The supply needed to heat the wire can be determined using Ohm’s Law. This states the relationship between voltage (V), current (I) and resistance (R) is given by V = IR. The voltage needed to pass the maximum safe current of 180 mA through a 10 cm length of wire with a diameter of 100 μm is calculated as:
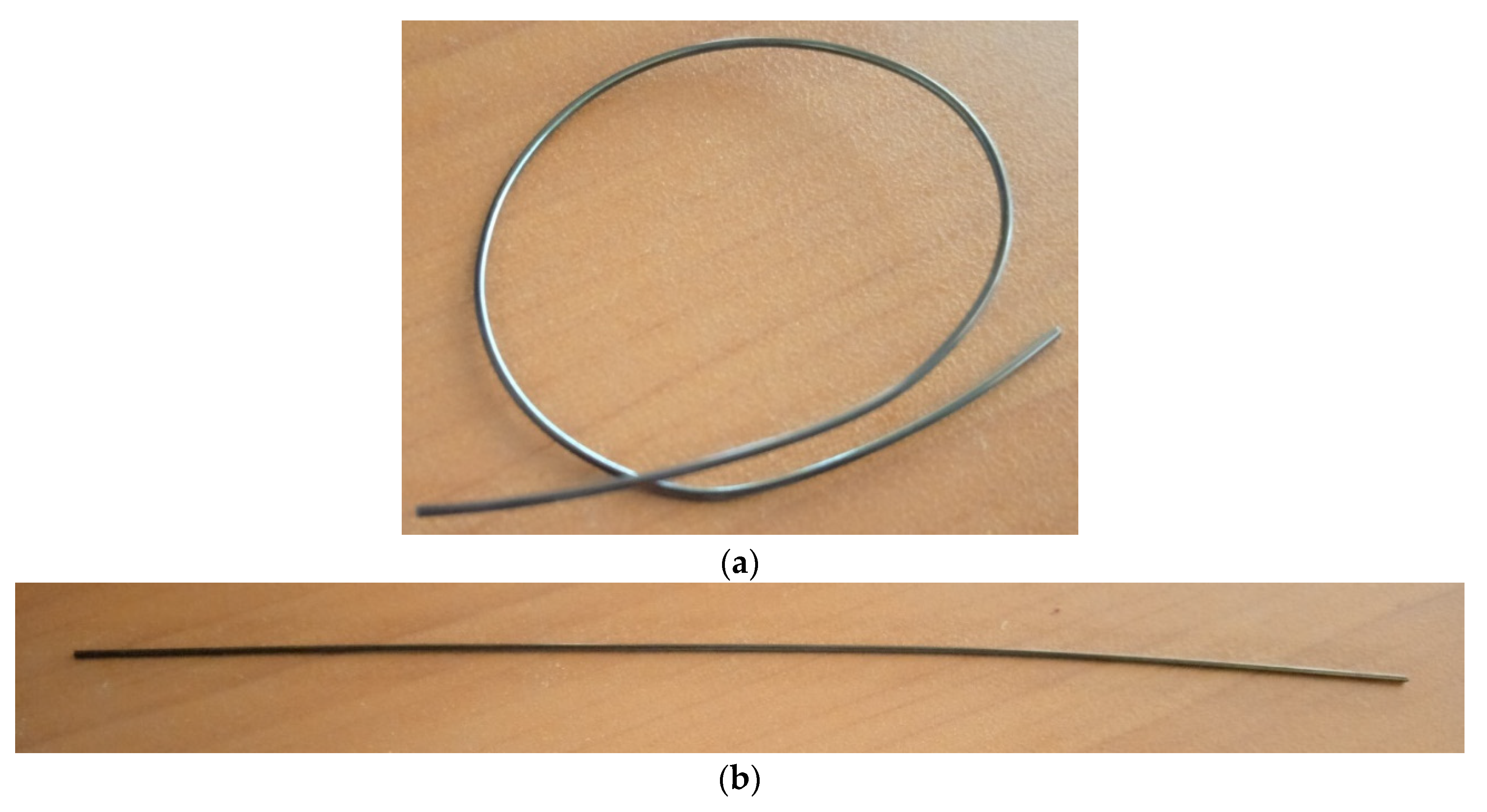
The pulling force of a nitinol wire cannot be increased by supplying current beyond the recommended limit. However, two or more wires can be connected in parallel to a voltage source. Two wires in parallel will give double the pulling force, but have to be supplied with double the current required to heat a single wire up. Figure 2a shows a nitinol wire of 0.5 mm in diameter and length of 155 mm; when heated with a 12 V, 1 A DC supply, the wire straightens up and contracts, as shown in Figure 2b. The wire has to be continuously supplied with current in order to maintain its straightened and contracted form.
2.2. Shape Memory Springs
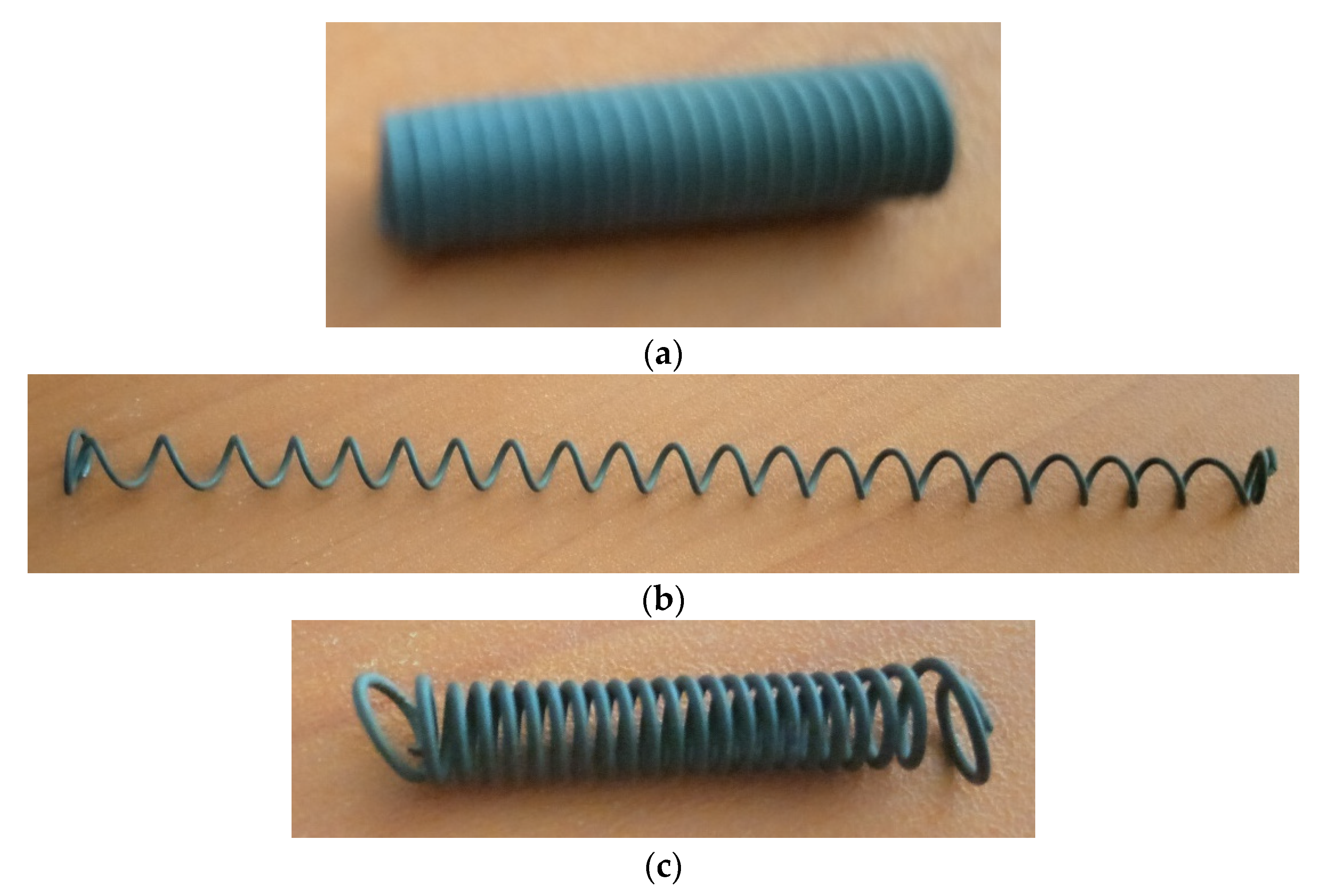
Similar to shape memory wires, shape memory springs exists in two different forms. Form A is the “remembered” form and is stable at higher temperatures; form B is more stable at lower temperatures. If the spring in form B is heated, it changes to form A and the spring becomes shorter. The reason for the change in length is due to the way the atoms are arranged. When the wire changes from form B to form A, the atoms rearrange, and the spring becomes shorter and thicker. The temperature at which this happens is called the transition temperature. SMA springs can exert quite substantial forces over a considerable distance. The smart spring used in this work has been trained during manufacture so that it contracts when heated. If a current of about 1 A D.C. is passed through the spring, it contracts (Figure 3c); when the current is switched off, it is still in its contracted form and requires a restoring force to pull the spring, because this is a one-way spring (Figure 3b). The original form of the spring is shown in Figure 3a before its first contraction cycle.
2.3. Two-Way Shape Memory Alloy
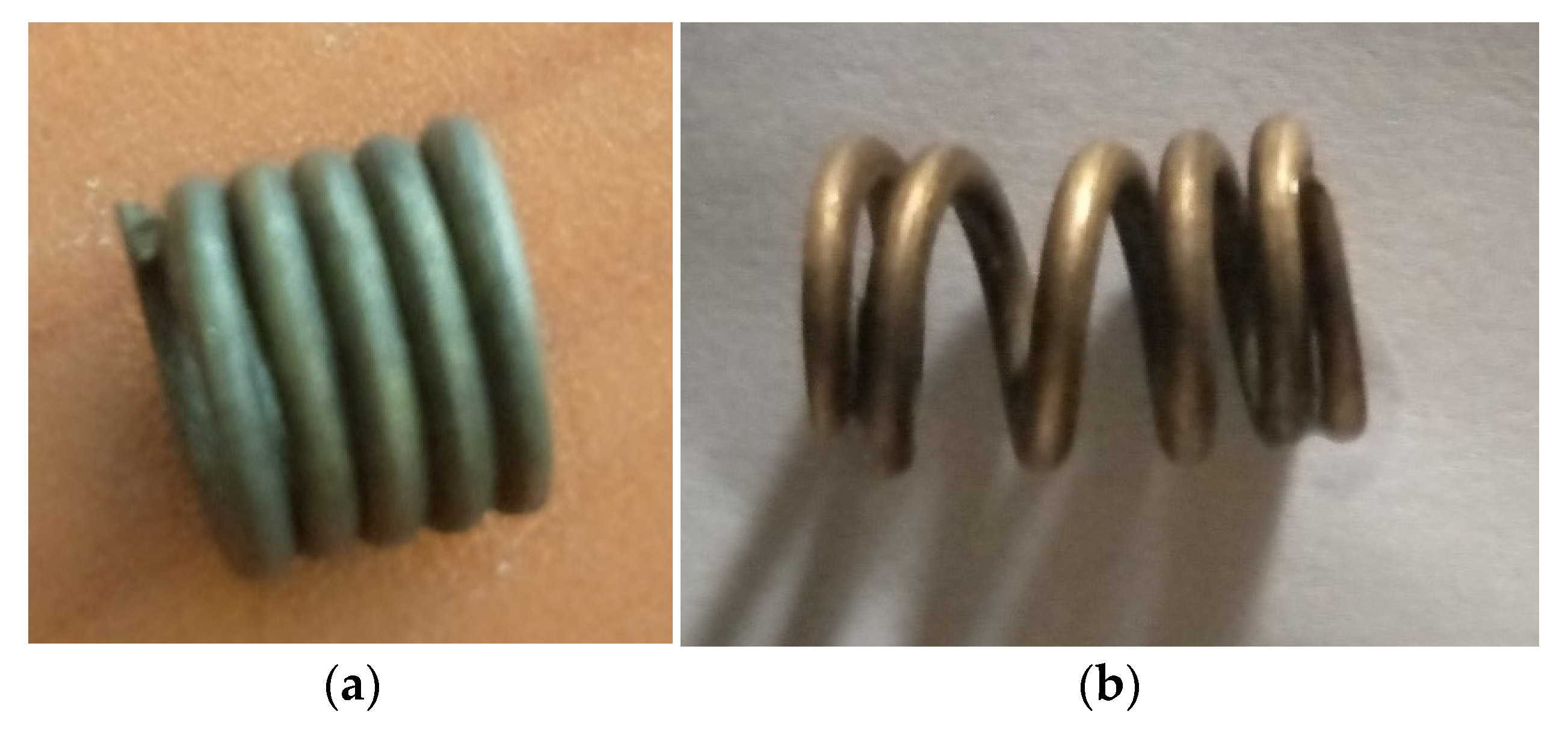
Different types of alloy behave in different ways. A two-way alloy changes its shape both when it is heated (Figure 4b) and when it is cooled (Figure 4a). However, the shape memory wire is made of a one-way alloy, getting shorter when it is heated but remaining the same length when it is cooled. To get back to the original length, it needs to be pulled with a restoring force.
During manufacture, two-way SMA springs have been “trained” so that they are closed when they are cold and open when they are heated [7]. The spring shows hysteresis behaviour, since the temperature at which it changes from form B to form A is higher than the temperature it changes from form A to form B. The hysteresis behaviour is a very useful behaviour if a SMA is to be used in a thermostat, since these are designed so that they do not switch on and off at the same temperature. When this happens, the spring would rapidly switch on and off as the temperature goes slightly above and below the temperature setting, which results in an unstable bang-bang control.
2.4. Shape Memory Polymer (SMP)
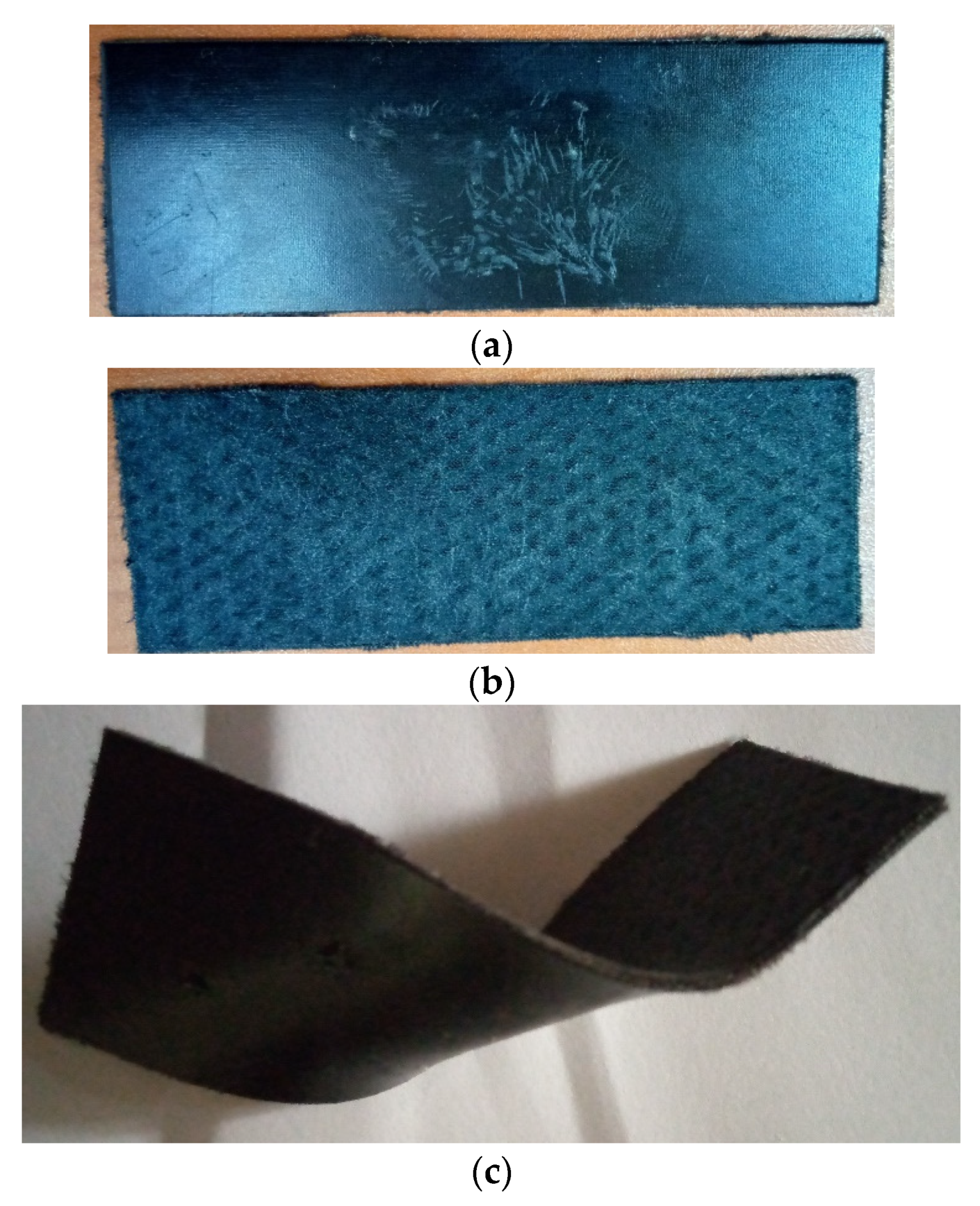
When heated, shape memory polymer (SMP) will temporarily soften. It can then be reshaped and will harden in seconds, maintaining the new configuration (Figure 5c). When reheated, a structural repair patch will return to its original cured shape (Figure 5a). SMP is a fiber-reinforced composite that uses Veriflex® as the matrix [8]. This allows the structural repair patch to easily change shape above its activation temperature. At lower temperatures, the material maintains high strength and high stiffness.
Applications of SMP include rapid manufacturing; lightweight, deployable structures; composite repair patching; and adaptable reinforcement. The unique features and benefits of the SMP include strengthening fabric reinforcement, ability to deform and recover shape repeatedly, ability to transform from rigid composite to soft elastomer, up to 80% elongation in elastic state, durability, and machinability [9].
2.5. Superelastic Alloys
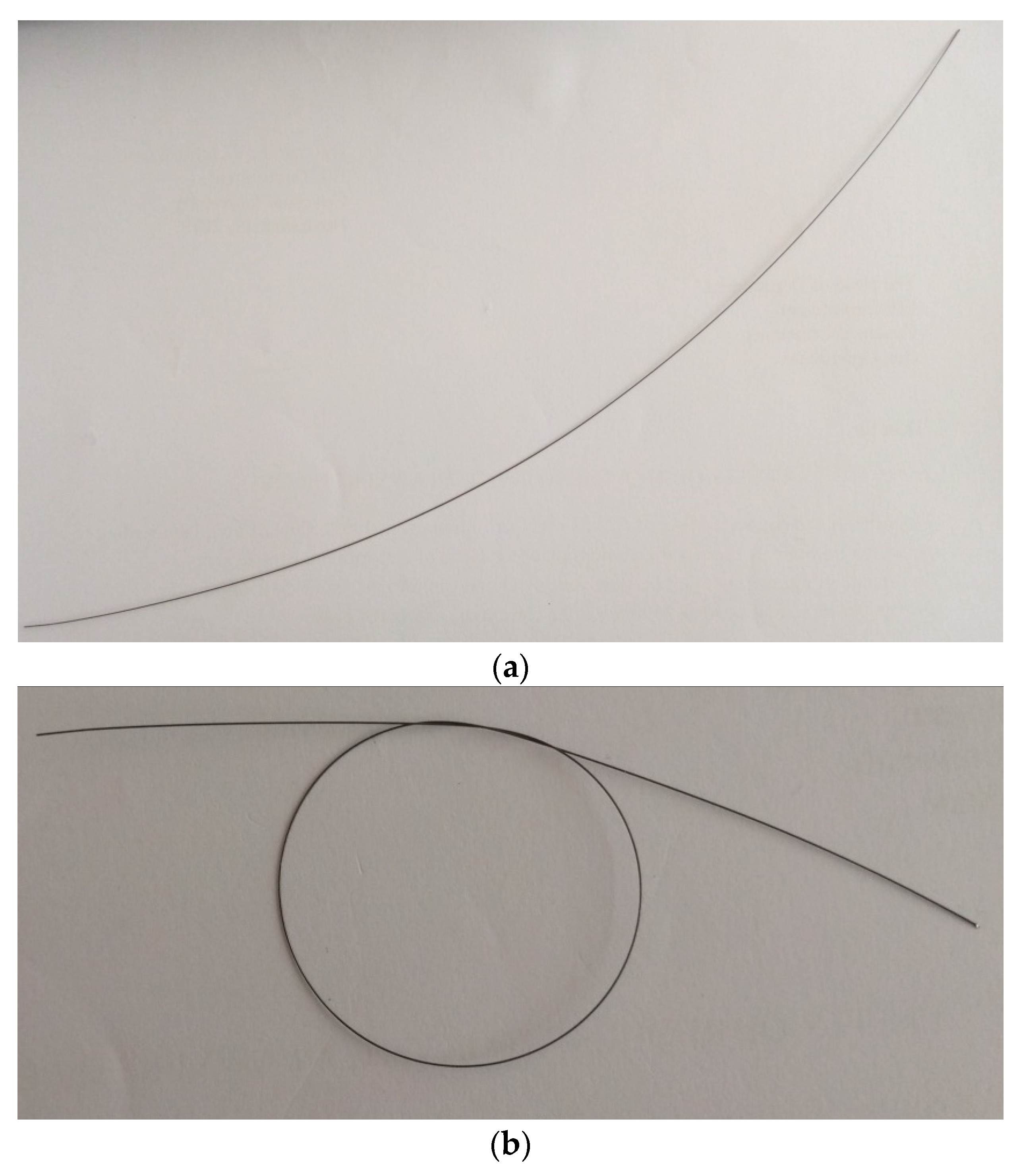
Like the SMA alloys described earlier, superelastic alloys also have a “memory”. When they are bent or stretched, they return to their original shape, though they do not need to be heated to do this [10]. These are the alloys used in some spectacle frames; by making the bridge and sides from superelastic alloy, the frames can be bent or twisted without being permanently deformed [11]. Superelastic alloy is also used in the archwires in dental braces [12], which can be stretched, positioned, and released, thus exerting a force on the teeth. In medicine, the alloy is widely used for making stents [13]. These are cylinders of wire mesh that are inserted into a hollow structure of the body to keep it open, for example, an artery, vein, urethra, or trachea. Superelastic alloys also find applications in bra underwires and mobile phone antennae.
Superelastic alloys are also made of nickel and titanium and can exist as a “short” form (A) and a “long” form (B). What is different about a superelastic alloy is that its transition temperature is below room temperature. If it is stretched it changes to the “long” form (B) (Figure 6b). If the force is released, it reverts to the “short” form (A) (Figure 6a), which is more stable at room temperature, and it does not need to be heated for it to recover its remembered shape. This is because when superelastic wire stretches, the atoms slide back into a new arrangement; when the force is released, the atoms slide back again, so that its original length is recovered, a phenomenon called superelasticity [14]. Because this is very different from true elasticity, superelasticity is also known as pseudoelasticity.
3. Results
3.1. Open-Loop Nitinol Wire Control Circuit
SMAs are applied in this work as switching devices or electrical actuators. These are mechanical devices that create a movement when an electrical current is passed. Their advantage over traditional designs is that they have no moving parts other than those to which the smart alloy is attached. In addition to their use in robotics, other examples include the central locking system in cars, retractable headlamps, valves for controlling air flow, fast-acting fuses to protect against lightening, wing flaps on aeroplanes, and the barriers and signals in model train sets
In open loop control, there is no feedback. The supply voltage is simply switched on or off—for example, using a press switch or a timer circuit. Switches that can be used include reed switches operated by a magnet, micro switches, or membrane panels. Supply current can be “switched” by a thyristor, bipolar transistor, or FET (field effect transistor). The control circuit shows how the piezoelectric sensor can control the supply switching. A bipolar transistor is used as the output stage of microelectronic control circuit.
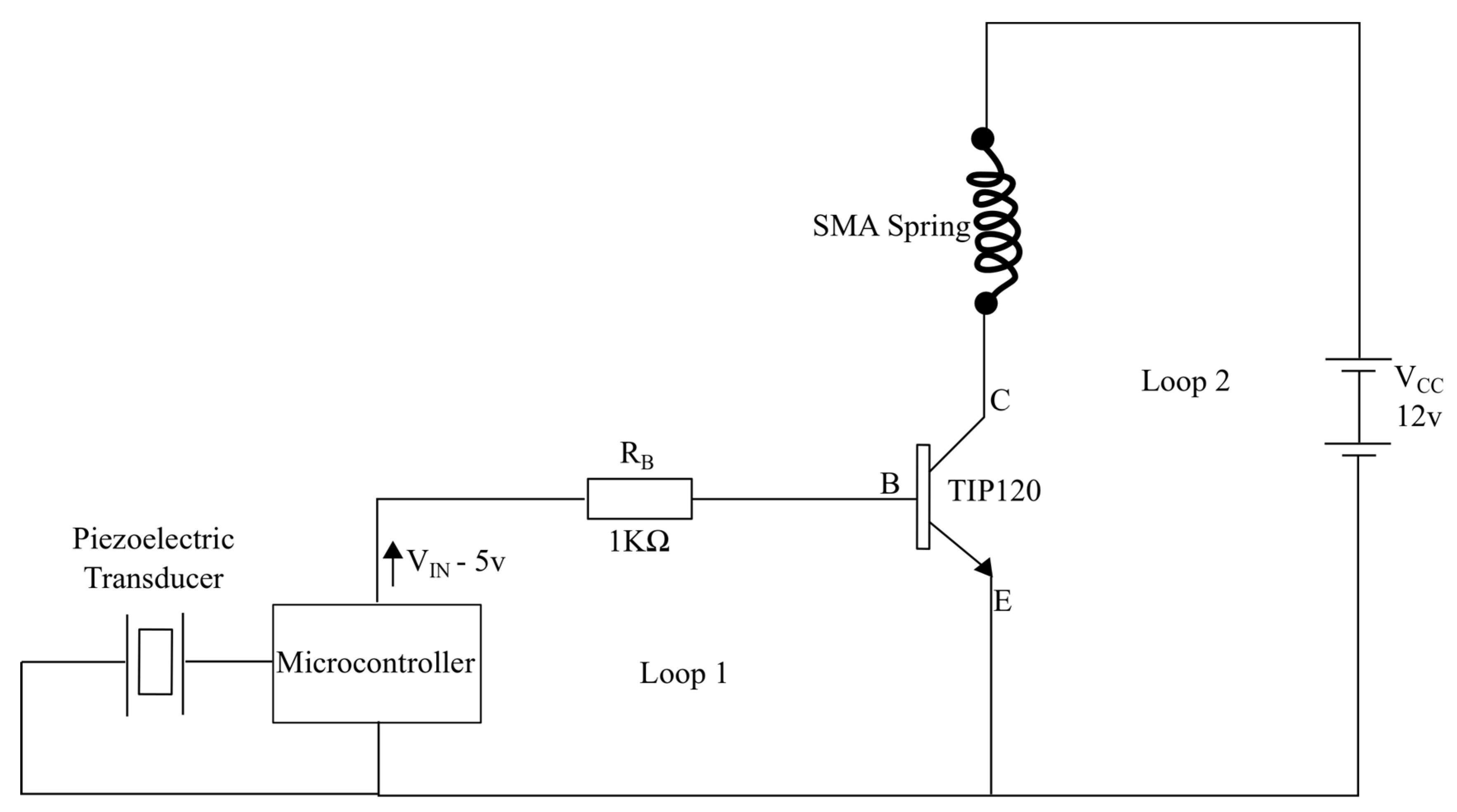
Figure 7 shows a schematic circuit to implement the shock-triggered open-loop control of SMA using a transistor arrangement. is the control voltage used to determine if the transistor is OFF or ON. When the transistor is ON, current flows around loop 2 from to . When the bipolar junction transistor (BJT) is OFF, no current flows through loop 2. limits the base current into the transistor. To analyse the loop from to and across the junction, if the PN junction is forward biased, is greater than or . Current will flow into the base of the transistor around this loop. For a BJT in its active region, . If is large enough to forward bias this junction to cause base current to flow, then collector current flows in to the transistor and turns ON so current flows around loop 1. If is small, then is small, the transistor is OFF and no flows, . But if is large enough, then is non-zero, and the transistor turns ON. When , the transistor is in its cut off region, and the voltage equals . As increases, likewise increases, so the cut off region is moved out.
can be designed to be an output connected to an embedded controller; this output pin generates a voltage between HIGH () and LOW (). A HIGH voltage causes the transistor to turn ON, which will cause current to flow in loop 2, so a connected actuator such as a SMA will be energized. If a LOW voltage, , is written, the transistor will be OFF, so the actuator will be OFF. A varying voltage at will cause the same corresponding effect at the actuator. In this configuration, the transistor acts as an amplifier, so that a small current from the controller results in a large current that drives the actuator. By writing varying values in the range of HIGH to LOW into the , the duty cycle of the voltage into the SMA is varied at a fixed frequency.
The piezoelectric transducer is used for the shock-triggered open-loop control. When the piezo is triggered by tapping or shock, a control algorithm implemented in the microcontroller produces a , which would contract the SMA spring. When the piezo is left untriggered, a is produced, which de-energizes the spring.
3.2. Electrical Actuation of a Model Robotic Arm with Shape Memory Springs
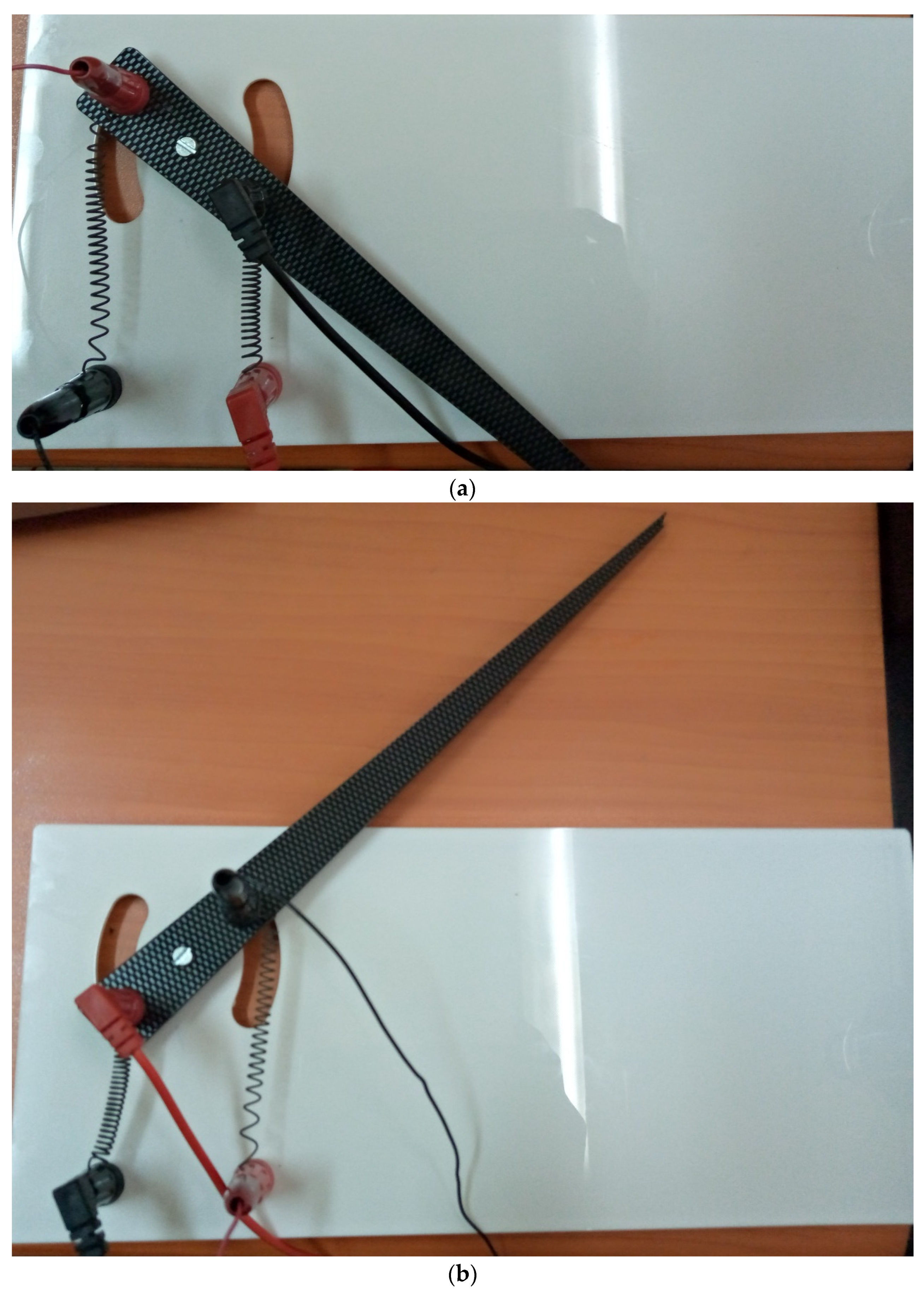
The shape memory effect is applied to a model of a robotic arm. The model uses two pieces of shape memory springs connected to a lever on either side of a pivot (Figure 8). When a voltage is connected to one of the smart wires, the spring contracts (by about 5%), and the lever moves. If the voltage is disconnected, and current is now passed through the other spring, the lever moves back in the opposite direction.
In the robot arm model application in this work, a restoring force is provided by the contraction of the other wire when heated. The restoring force can also be applied by stretching the contracted wire to its original length and moving the robot arm.
4. Discussion
The bidirectional movement of a robotic lever through shape memory spring actuation via a microelectronic circuit through tapping movements on a piezo transducer has been designed. SMAs, also called smart alloys, can be made with different transition temperatures, and the change in shape of these materials (shape memory springs and wires, two-way shape memory alloys, shape memory polymers, and superelastic alloys) when they are heated or cooled can be used in a wide variety of applications, which is not only limited to thermal actuators, but for free recovery and constrained recovery applications. For example, SMAs are programmed into kettles, so that when water starts boiling, the heat makes the alloy change shape and switch off the current. Other examples are thermostats in a central heating system, a device for programming the opening and closing of windows according to temperature change, and in a tap to control the proportions of hot and cold water. In free recovery applications, SMAs can be used as blood clot filters and in the construction of solar panels. In constrained recovery applications, they can be used to make bone plates that hold broken bones in place during healing.
5. Conclusions
The demonstration of a shock-triggered open-loop control of SMA spring has been implemented. The different types of shape memory alloys and polymers have been discussed together with their actuation techniques, and applications/SMA springs have been applied in this work to move a lever arm of a robotic joint. Owing to the large amount of current and high temperatures needed to cause electrical actuation of SMA materials, they are not well suited in wearable robotics applications, but find other applications in humanoid robot design and electro-thermal actuators.
Conflicts of Interest
The author declare no conflict of interest.
References
- Andreasen, G.F.; Morrow, R.E. Laboratory and clinical analyses of nitinol wire. Am. J. Orthod. 1978, 73, 142–151. [Google Scholar] [CrossRef]
- Otsuka, K.; Wayman, C.M. (Eds.) Shape Memory Materials; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Xie, T. Tunable polymer multi-shape memory effect. Nature 2010, 464, 267–270. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, K.; Kobayashi, S.; Sato, Y. Thermomechanics of transformation pseudoelasticity and shape memory effect in alloys. Int. J. Plast. 1986, 2, 59–72. [Google Scholar] [CrossRef]
- Sato, A.; Chishima, E.; Soma, K.; Mori, T. Shape memory effect in γ⇄ ϵ transformation in Fe-30Mn-1Si alloy single crystals. Acta Metall. 1982, 30, 1177–1183. [Google Scholar] [CrossRef]
- Jang, J.H.; Koh, C.Y.; Bertoldi, K.; Boyce, M.C.; Thomas, E.L. Combining pattern instability and shape-memory hysteresis for phononic switching. Nano Lett. 2009, 9, 2113–2119. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Liu, Y.; Van Humbeeck, J. Two-way shape memory effect developed by martensite deformation in NiTi. Acta Mater. 1998, 47, 199–209. [Google Scholar] [CrossRef]
- McClung, A.J.; Tandon, G.P.; Baur, J.W. Strain rate-and temperature-dependent tensile properties of an epoxy-based, thermosetting, shape memory polymer (Veriflex-E). Mech. Time-Depend. Mater. 2012, 16, 205–221. [Google Scholar] [CrossRef]
- Havens, E.; Snyder, E.A.; Tong, T.H. Light-activated shape memory polymers and associated applications. In Smart Structures and Materials 2005: Industrial and Commercial Applications of Smart Structures Technologies; International Society for Optics and Photonics: The Hague, The Netherlands, 2005; Volume 5762, pp. 48–55. [Google Scholar]
- DesRoches, R.; McCormick, J.; Delemont, M. Cyclic properties of superelastic shape memory alloy wires and bars. J. Struct. Eng. 2004, 130, 38–46. [Google Scholar] [CrossRef]
- Brailovski, V.; Trochu, F. Review of shape memory alloys medical applications in Russia. Bio-Med Mater. Eng. 1996, 6, 291–298. [Google Scholar] [CrossRef]
- Machado, L.G.; Savi, M.A. Medical applications of shape memory alloys. Braz. J. Med. Biol. Res. 2003, 36, 683–691. [Google Scholar] [CrossRef] [PubMed]
- Cragg, A.; Lund, G.; Rysavy, J.; Castaneda, F.; Castaneda-Zuniga, W.; Amplatz, K. Nonsurgical placement of arterial endoprostheses: A new technique using nitinol wire. Radiology 1983, 147, 261–263. [Google Scholar] [CrossRef] [PubMed]
- Huang, X.; Liu, Y. Effect of annealing on the transformation behavior and superelasticity of NiTi shape memory alloy. Scr. Mater. 2001, 45, 153–160. [Google Scholar] [CrossRef]
Figure 1.
A shape memory alloy contracts when temperature is increased and relaxes so that it can be formed into any shape when cooled.
Figure 1.
A shape memory alloy contracts when temperature is increased and relaxes so that it can be formed into any shape when cooled.

Figure 2.
(a) A nitinol wire can be formed or twisted into any shape when cool; (b) a Nitinol wire straightens up to a length of 155 mm and contracts when heated up. The electric current needs to be continuously supplied for the wire to remain straightened.
Figure 2.
(a) A nitinol wire can be formed or twisted into any shape when cool; (b) a Nitinol wire straightens up to a length of 155 mm and contracts when heated up. The electric current needs to be continuously supplied for the wire to remain straightened.

Figure 3.
(a) A Shape memory spring in its fully contracted form of lenth 20 mm (Form A) before the first contraction cycle; (b) a shape memory spring in its relaxed form (Form B) after it is stretched out to 150 mm by an external mechanical force; (c) a shape memory spring in its contracted form of length 35 mm (Form A) after multiple contraction cycles. The SMA spring does not return to its fully contracted form (Figure 3a) after multiple contraction cycles.
Figure 3.
(a) A Shape memory spring in its fully contracted form of lenth 20 mm (Form A) before the first contraction cycle; (b) a shape memory spring in its relaxed form (Form B) after it is stretched out to 150 mm by an external mechanical force; (c) a shape memory spring in its contracted form of length 35 mm (Form A) after multiple contraction cycles. The SMA spring does not return to its fully contracted form (Figure 3a) after multiple contraction cycles.

Figure 4.
(a) A 2-way SMA spring is trained to be in its normally closed form of length 10 mm when cool; (b) a 2-way SMA spring is in its expanded form when heated by an electric current or high temperature.
Figure 4.
(a) A 2-way SMA spring is trained to be in its normally closed form of length 10 mm when cool; (b) a 2-way SMA spring is in its expanded form when heated by an electric current or high temperature.

Figure 5.
(a) The front of a shape memory polymer in its original cured shape and at a low temperature; it has high strength and stiffness and when reheated, it returns to this original cured shape; (b) the back panel; (c) A shape memory polymer at a high temperature; it has been reshaped and maintains its new configuration. The strip of SMP composite has been warmed, twisted into a new shape, and left to cool; when warmed again, it reverts to its original shape.
Figure 5.
(a) The front of a shape memory polymer in its original cured shape and at a low temperature; it has high strength and stiffness and when reheated, it returns to this original cured shape; (b) the back panel; (c) A shape memory polymer at a high temperature; it has been reshaped and maintains its new configuration. The strip of SMP composite has been warmed, twisted into a new shape, and left to cool; when warmed again, it reverts to its original shape.

Figure 6.
(a) A superelastic alloy in Form A at low temperature; it is not subjected to any external force. (b) A superelastic alloy in Form B at low temperature; it is subjected to an external force that is imposed by the knot; when the external force is removed, it springs back to Form A (Figure 6b).
Figure 6.
(a) A superelastic alloy in Form A at low temperature; it is not subjected to any external force. (b) A superelastic alloy in Form B at low temperature; it is subjected to an external force that is imposed by the knot; when the external force is removed, it springs back to Form A (Figure 6b).

Figure 7.
Schematic circuit for the shock-triggered open-loop control of SMA controlled by transistor and a microcontroller with a piezo transducer as the input.
Figure 7.
Schematic circuit for the shock-triggered open-loop control of SMA controlled by transistor and a microcontroller with a piezo transducer as the input.

Figure 8.
(a) A model of a robot arm indicating an electrical current controlling the lengths of the smart wires to move the lever arm downwards when SMA Spring 1 is relaxed and SMA Spring 2 is heated; (b) a model of a robot arm indicating an electrical current controlling the lengths of the smart wires to move the lever arm upwards when SMA Spring 2 is relaxed and SMA Spring 1 is heated.
Figure 8.
(a) A model of a robot arm indicating an electrical current controlling the lengths of the smart wires to move the lever arm downwards when SMA Spring 1 is relaxed and SMA Spring 2 is heated; (b) a model of a robot arm indicating an electrical current controlling the lengths of the smart wires to move the lever arm upwards when SMA Spring 2 is relaxed and SMA Spring 1 is heated.

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Oguntosin, V. Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion. Proceedings 2020, 64, 3. https://0-doi-org.brum.beds.ac.uk/10.3390/IeCAT2020-08512
AMA Style
Oguntosin V. Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion. Proceedings. 2020; 64(1):3. https://0-doi-org.brum.beds.ac.uk/10.3390/IeCAT2020-08512
Chicago/Turabian StyleOguntosin, Victoria. 2020. "Open-Loop Control Design of Shape Memory Alloys and Polymers through Tapping Motion" Proceedings 64, no. 1: 3. https://0-doi-org.brum.beds.ac.uk/10.3390/IeCAT2020-08512