
Propeller Position Effects over the Pressure and Friction Coefficients over the Wing of an UAV with Distributed Electric Propulsion: A Proper Orthogonal Decomposition Analysis




Abstract
:1. Introduction
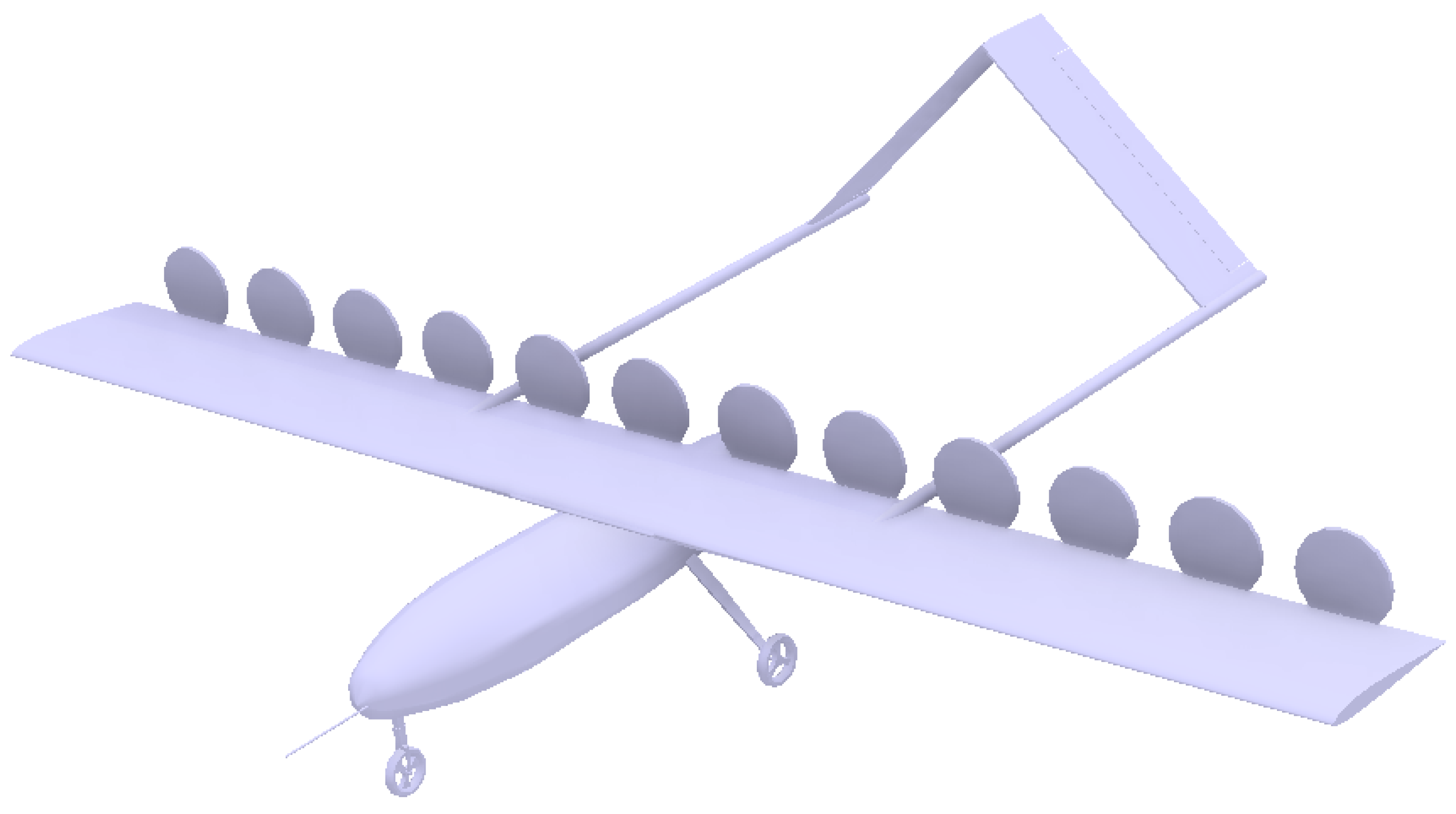
2. Aircraft Description
3. Methods
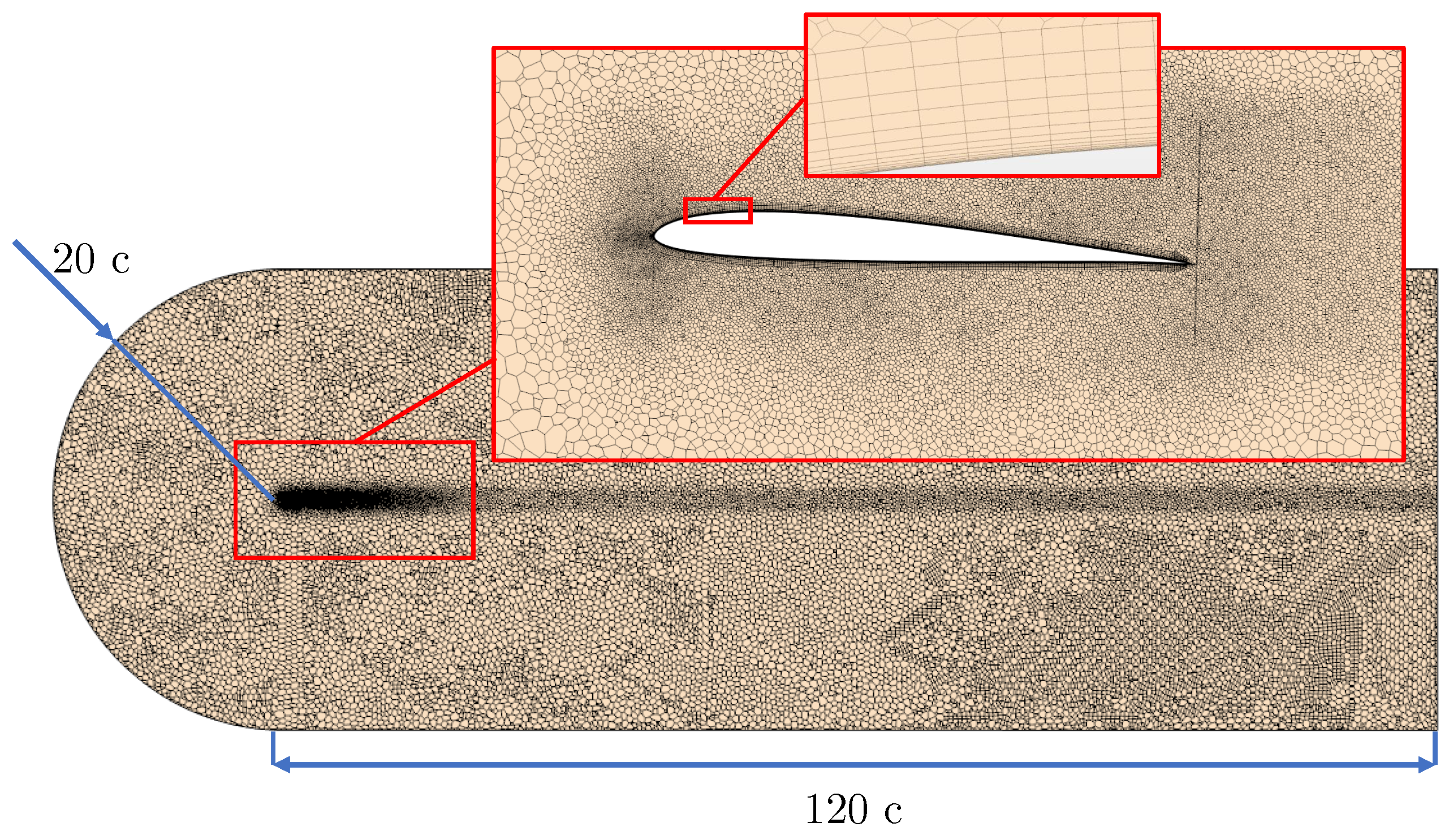
3.1. Computational Domain
3.2. CFD Methodology
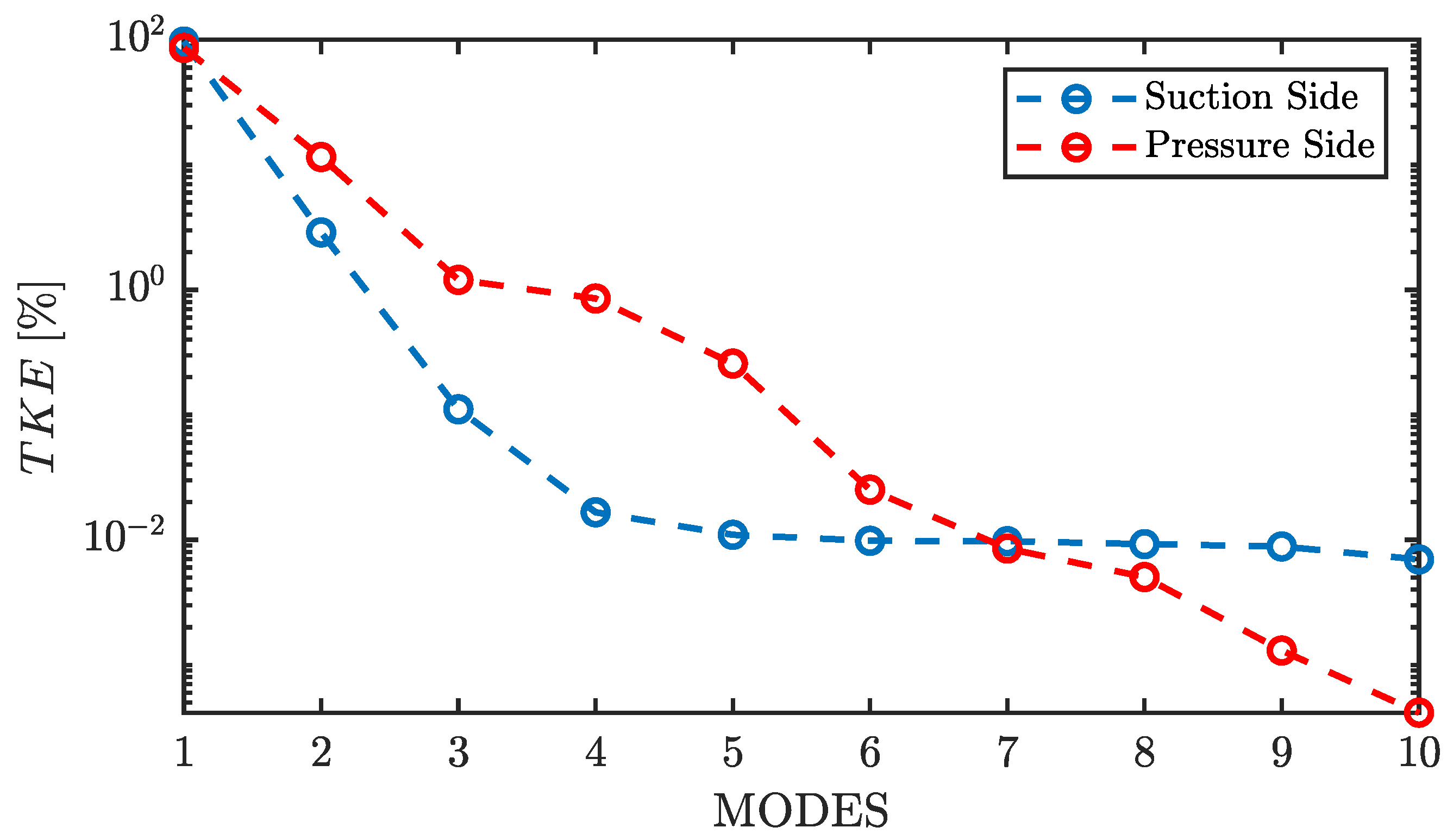
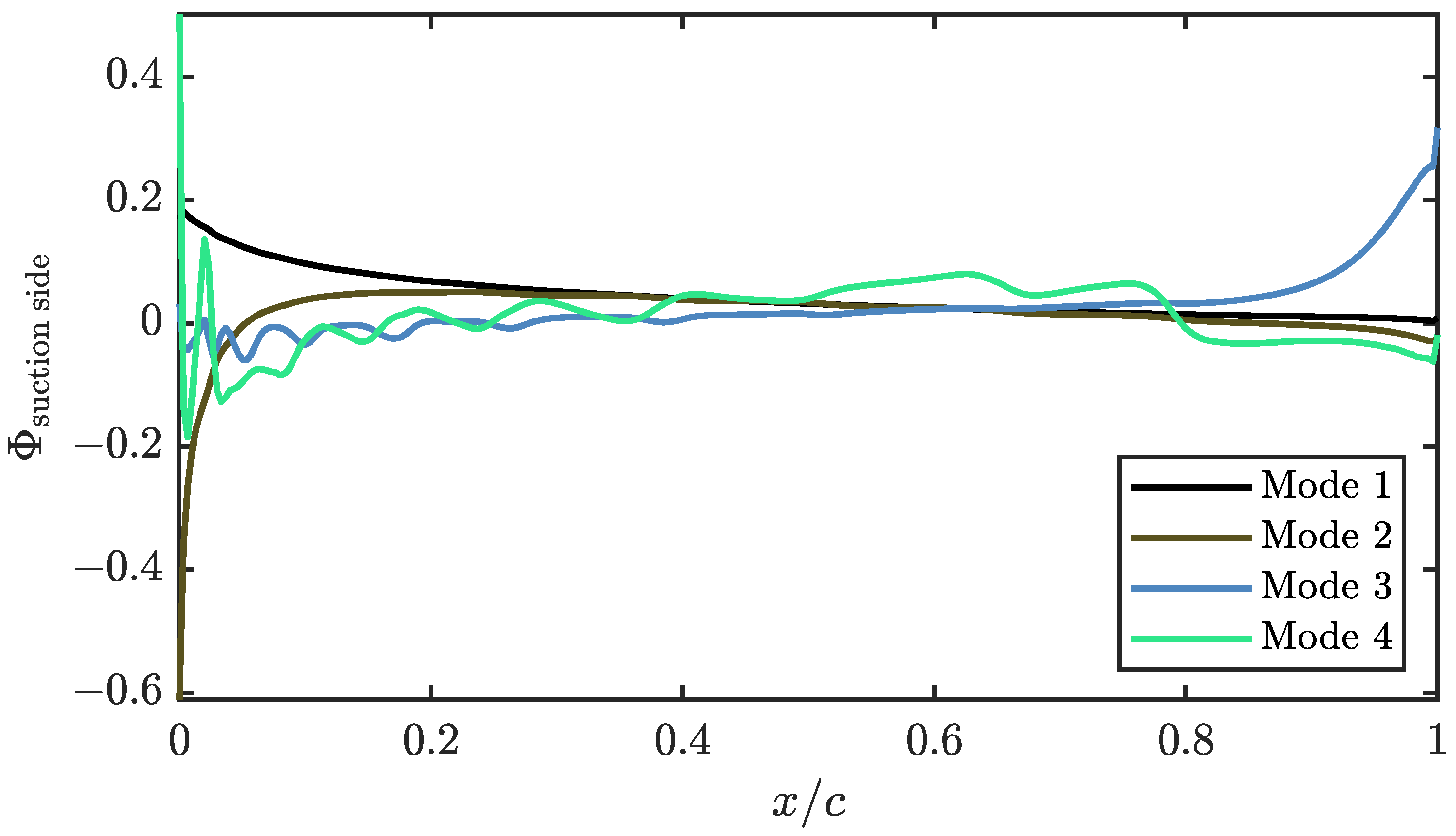
3.3. POD Application
4. Results and Discussion
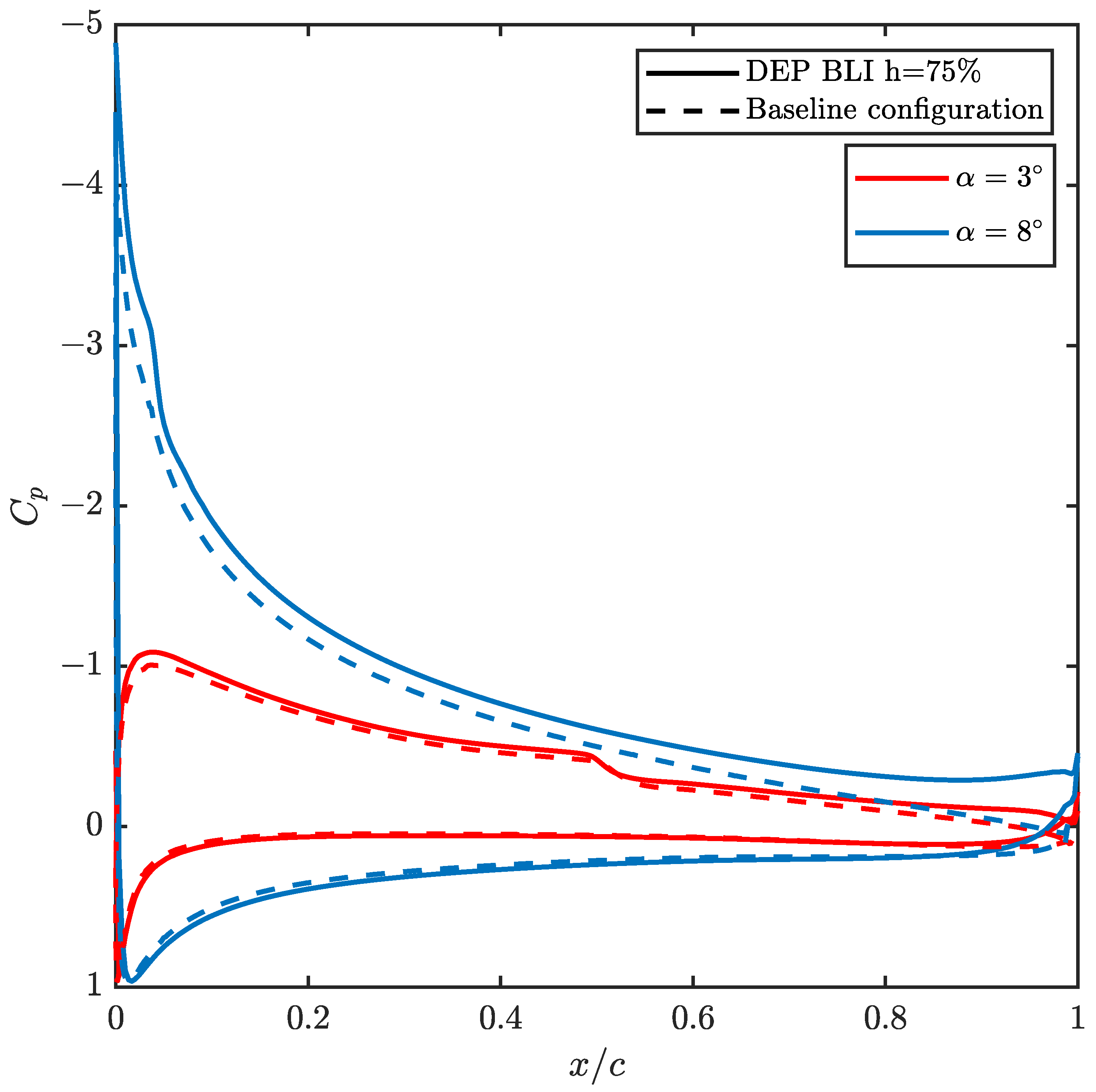
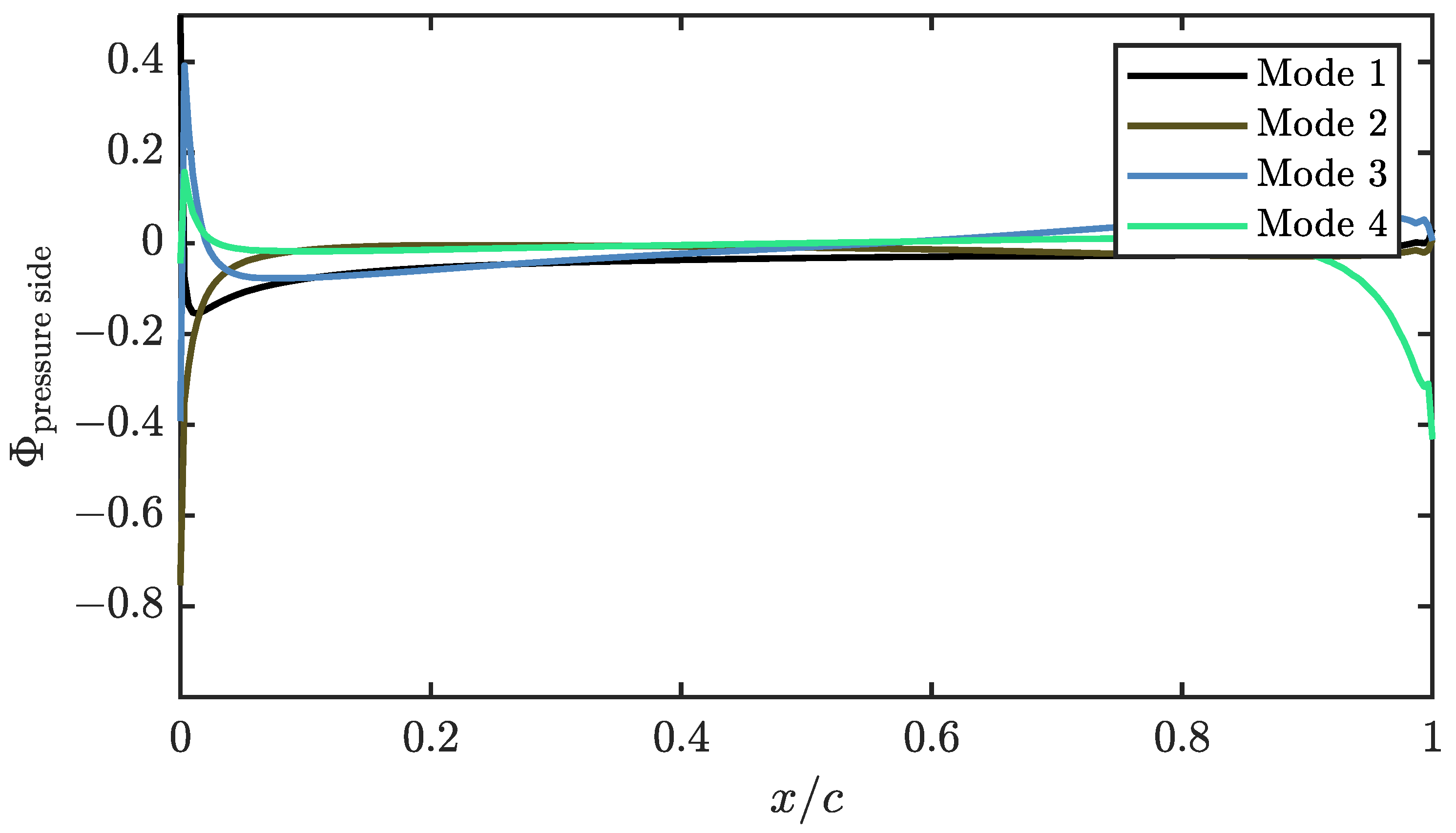
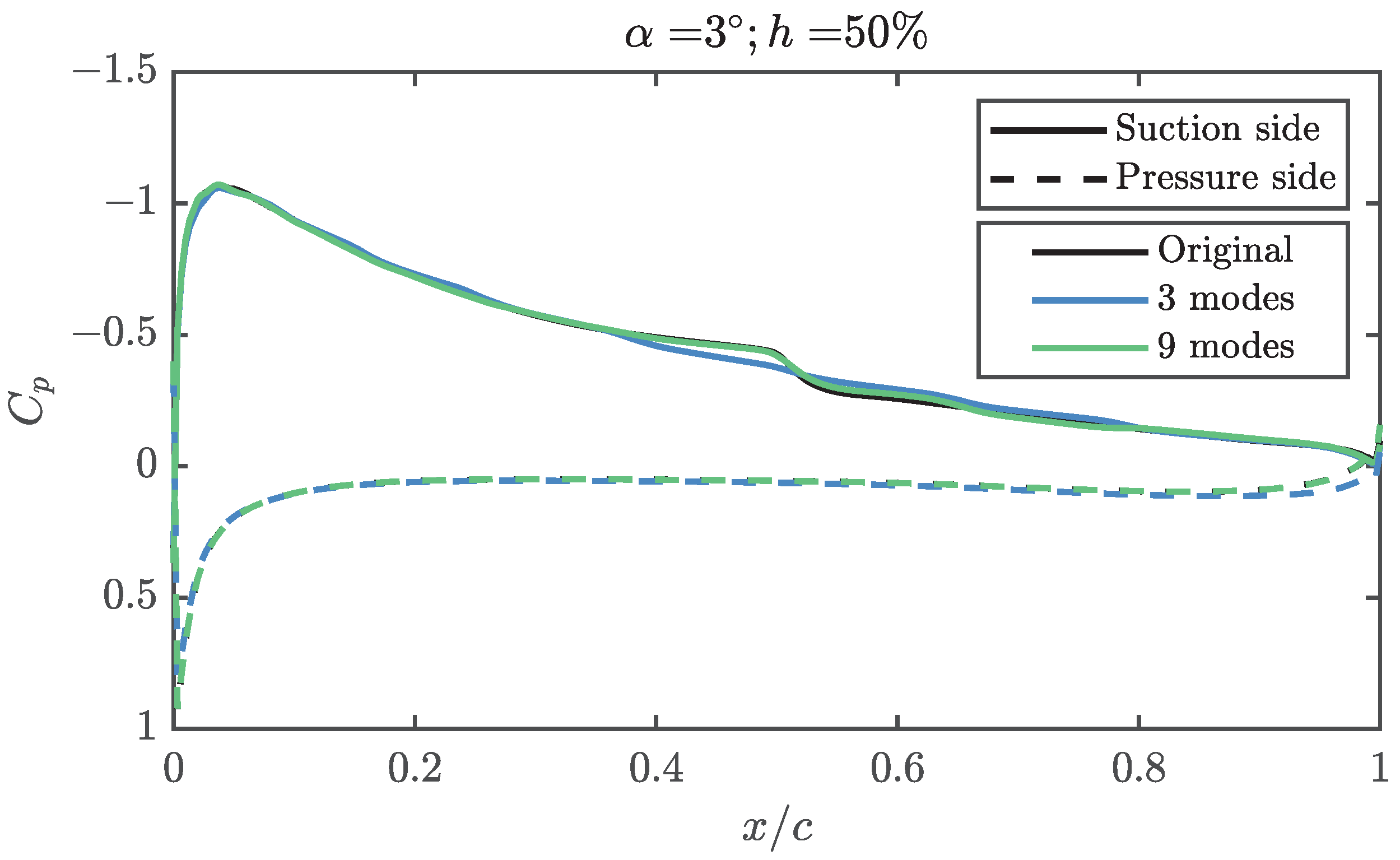
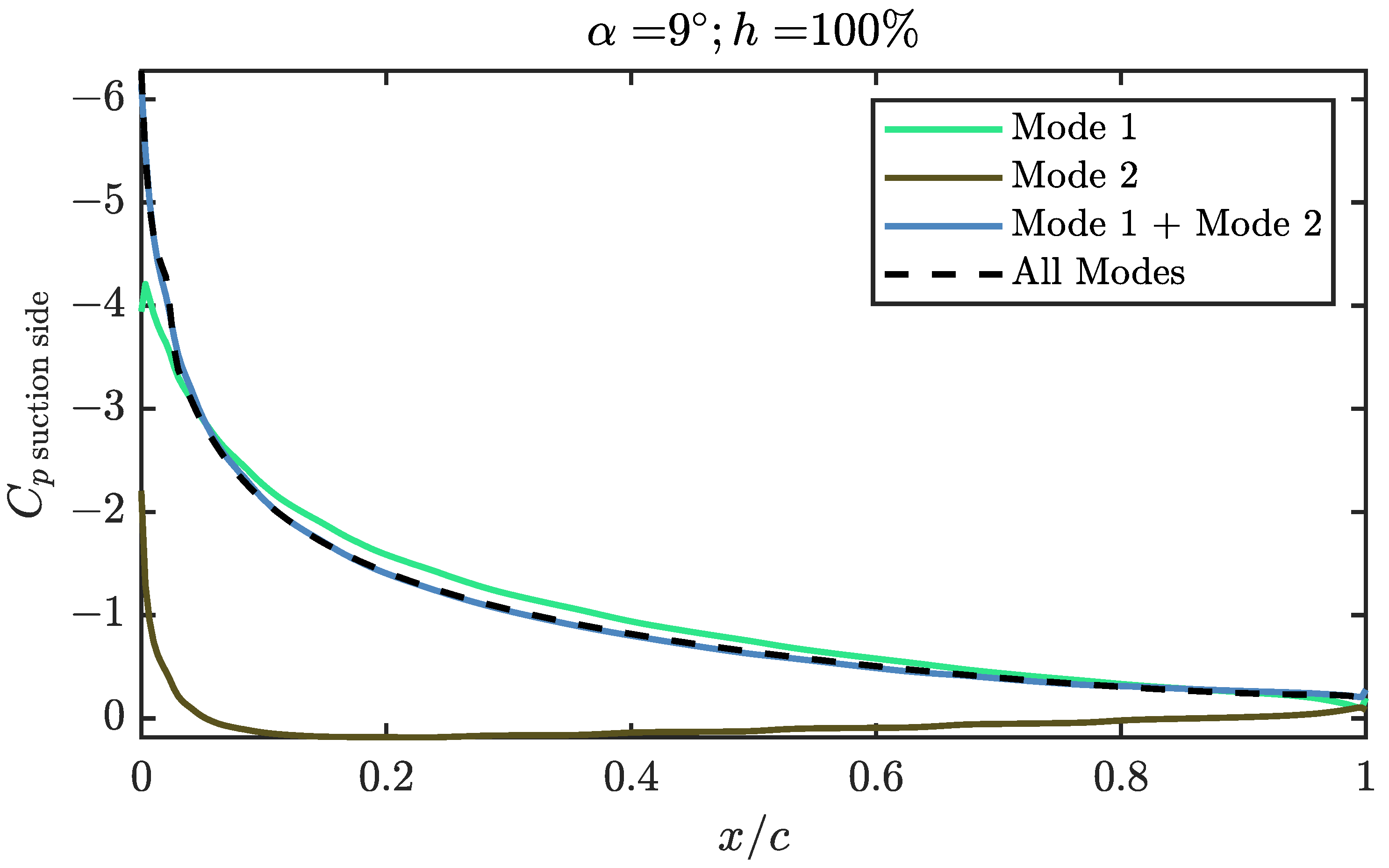
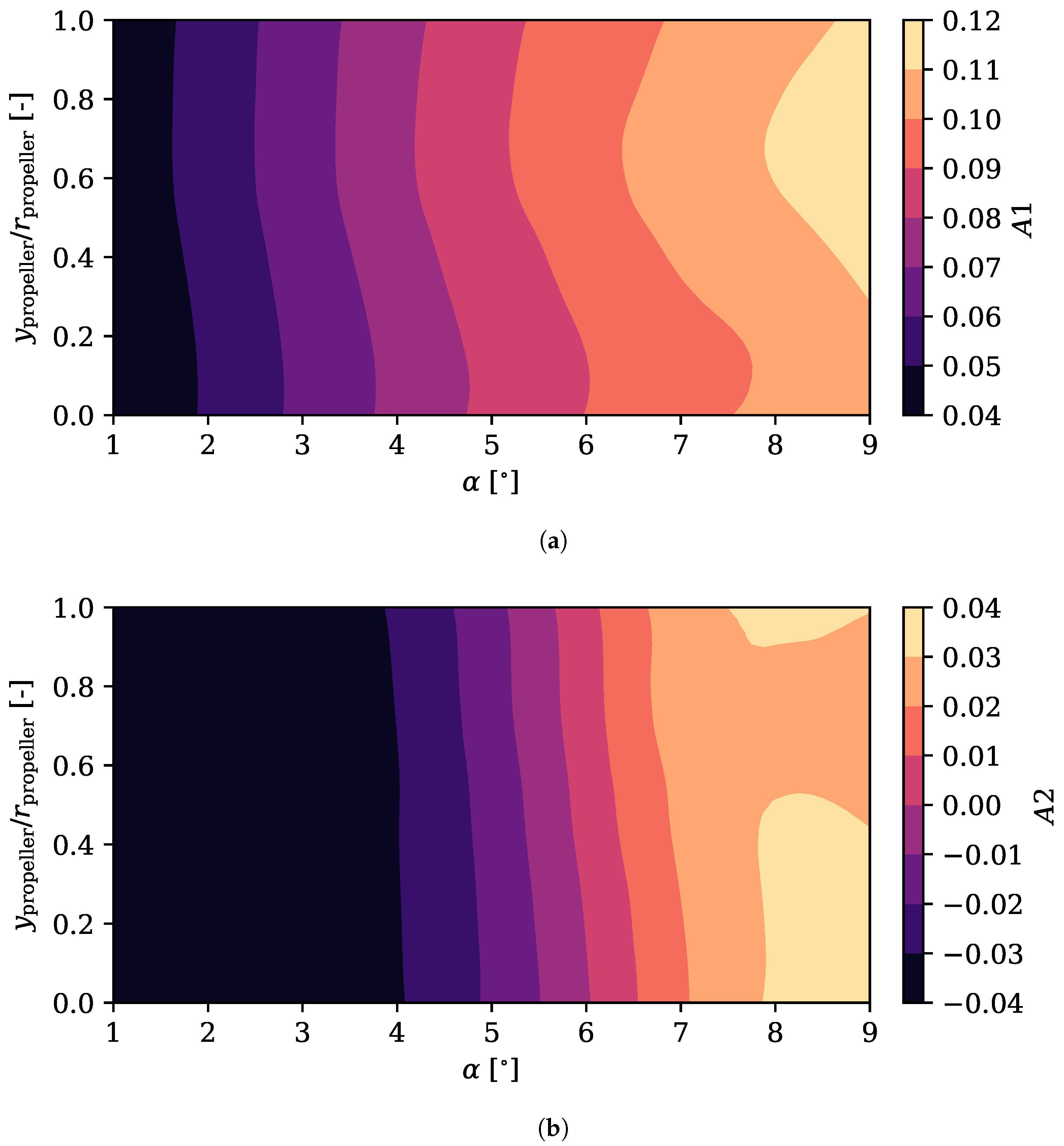
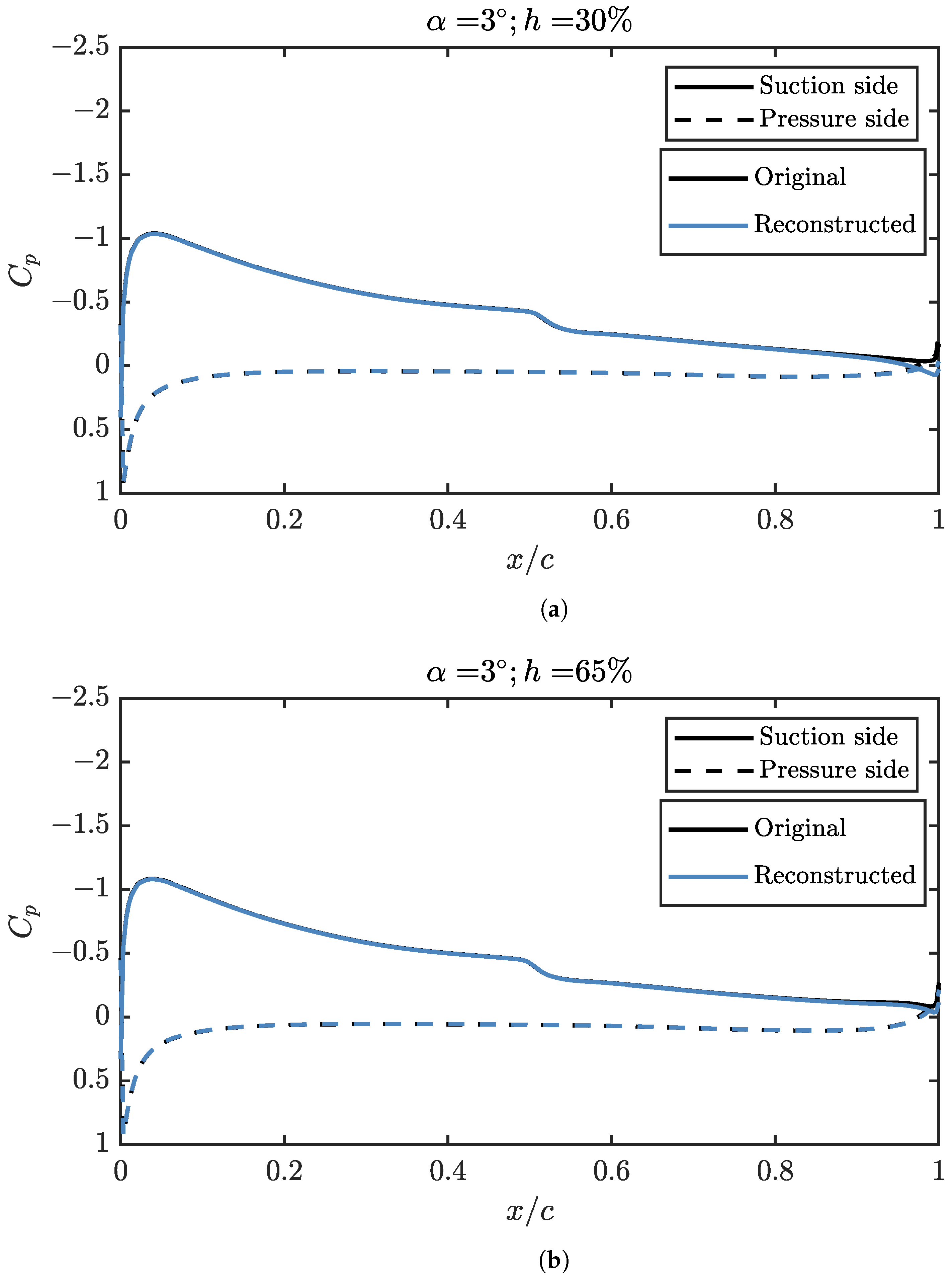
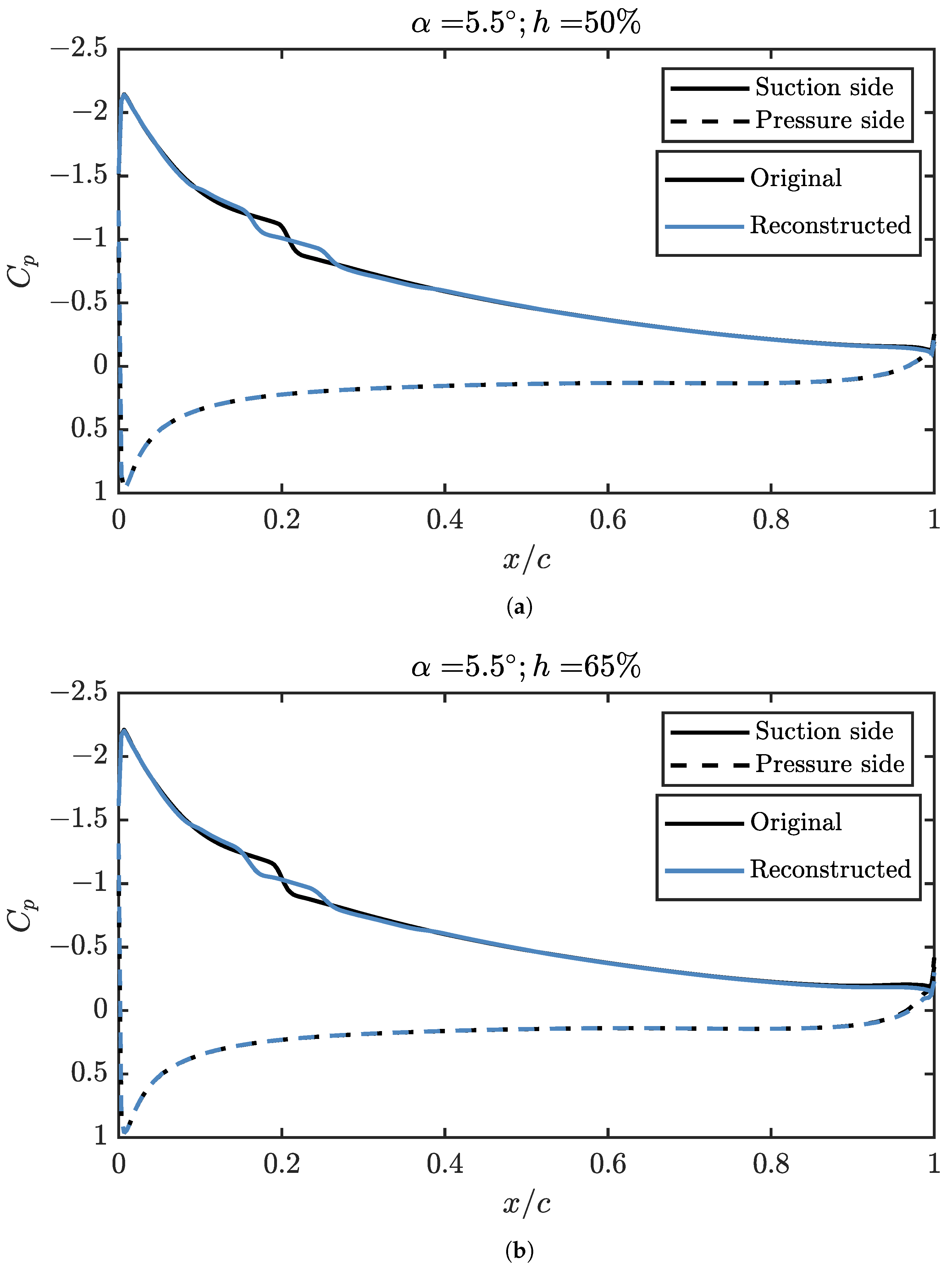
4.1. Pressure Coefficient Analysis Using POD
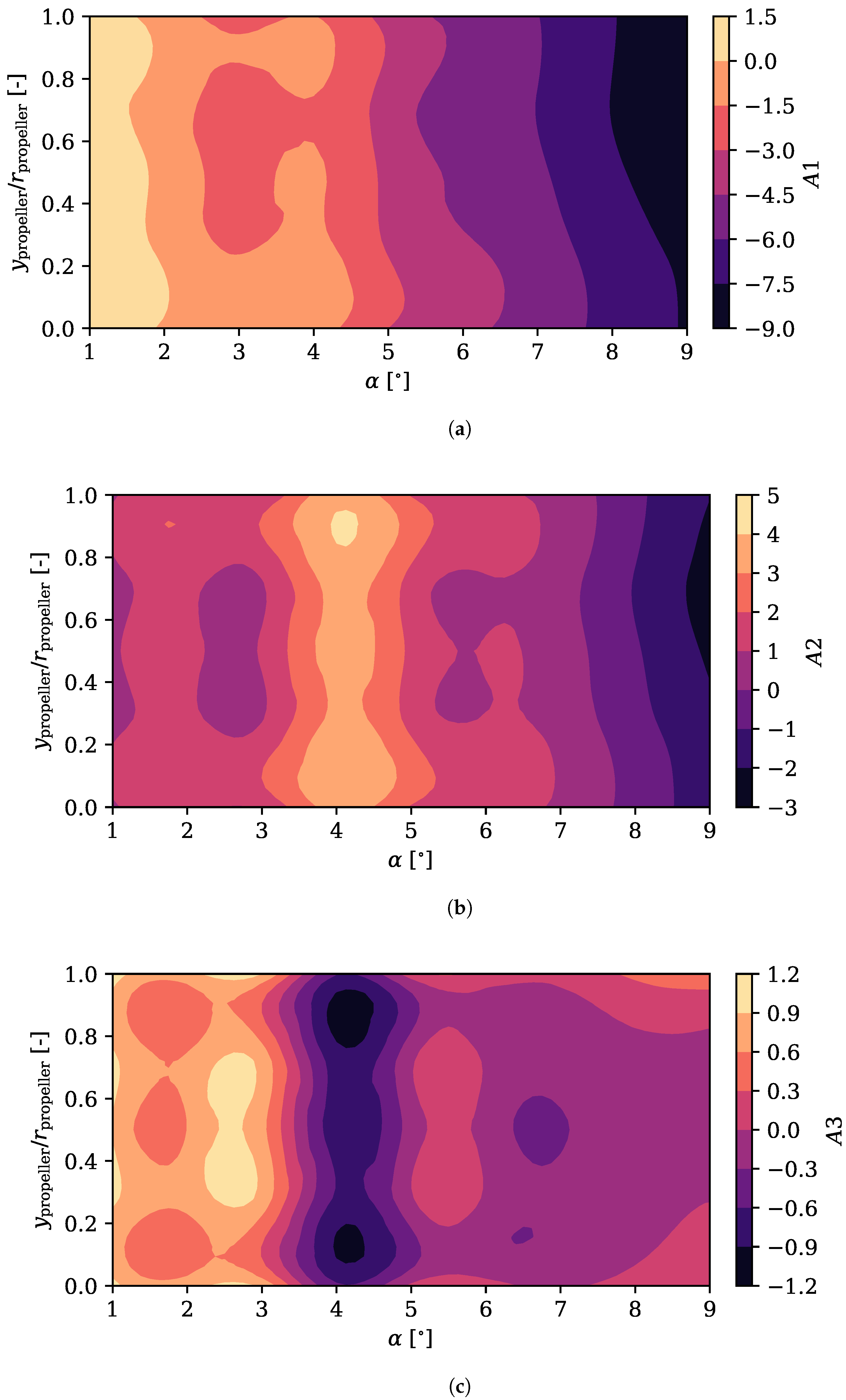
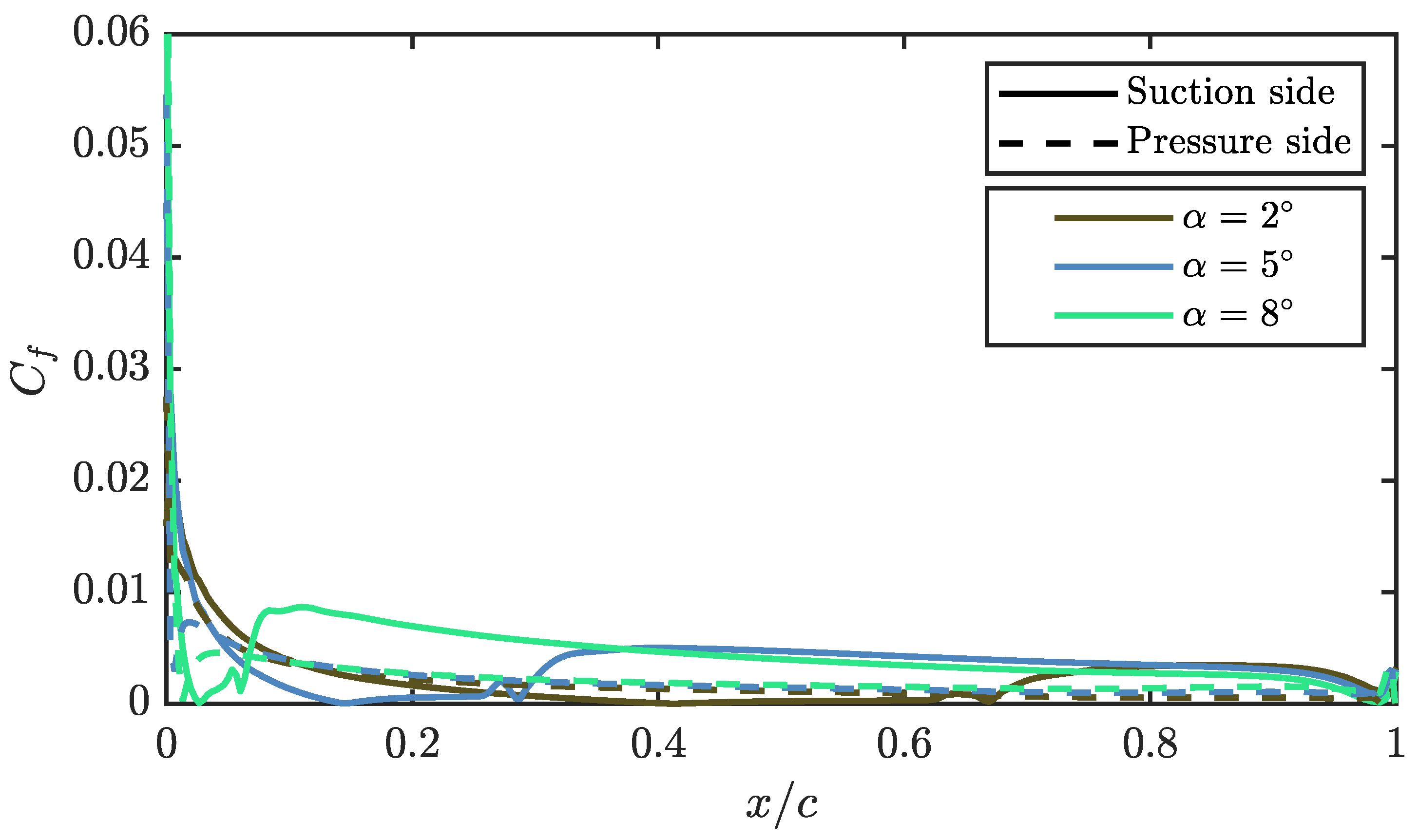
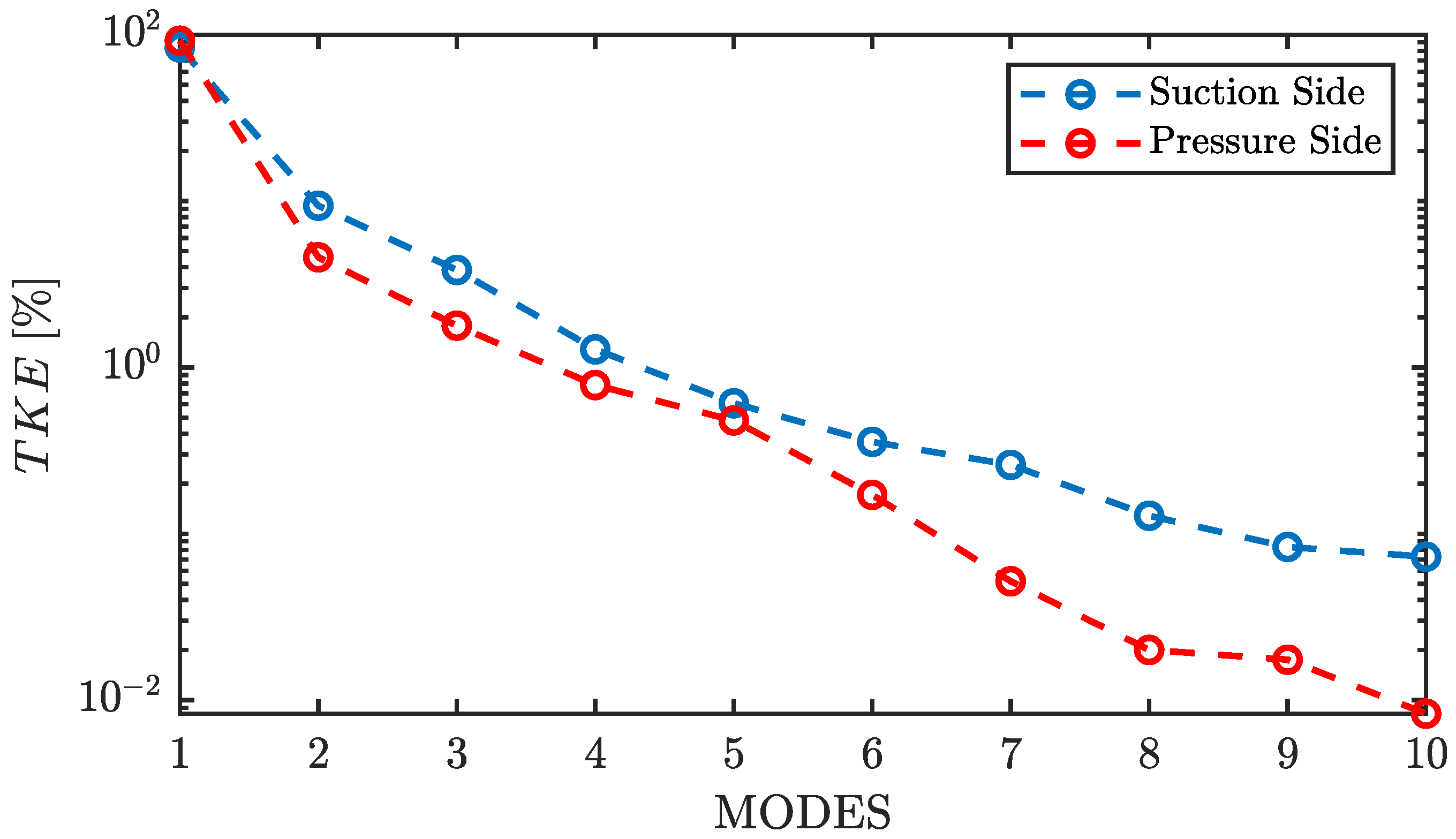
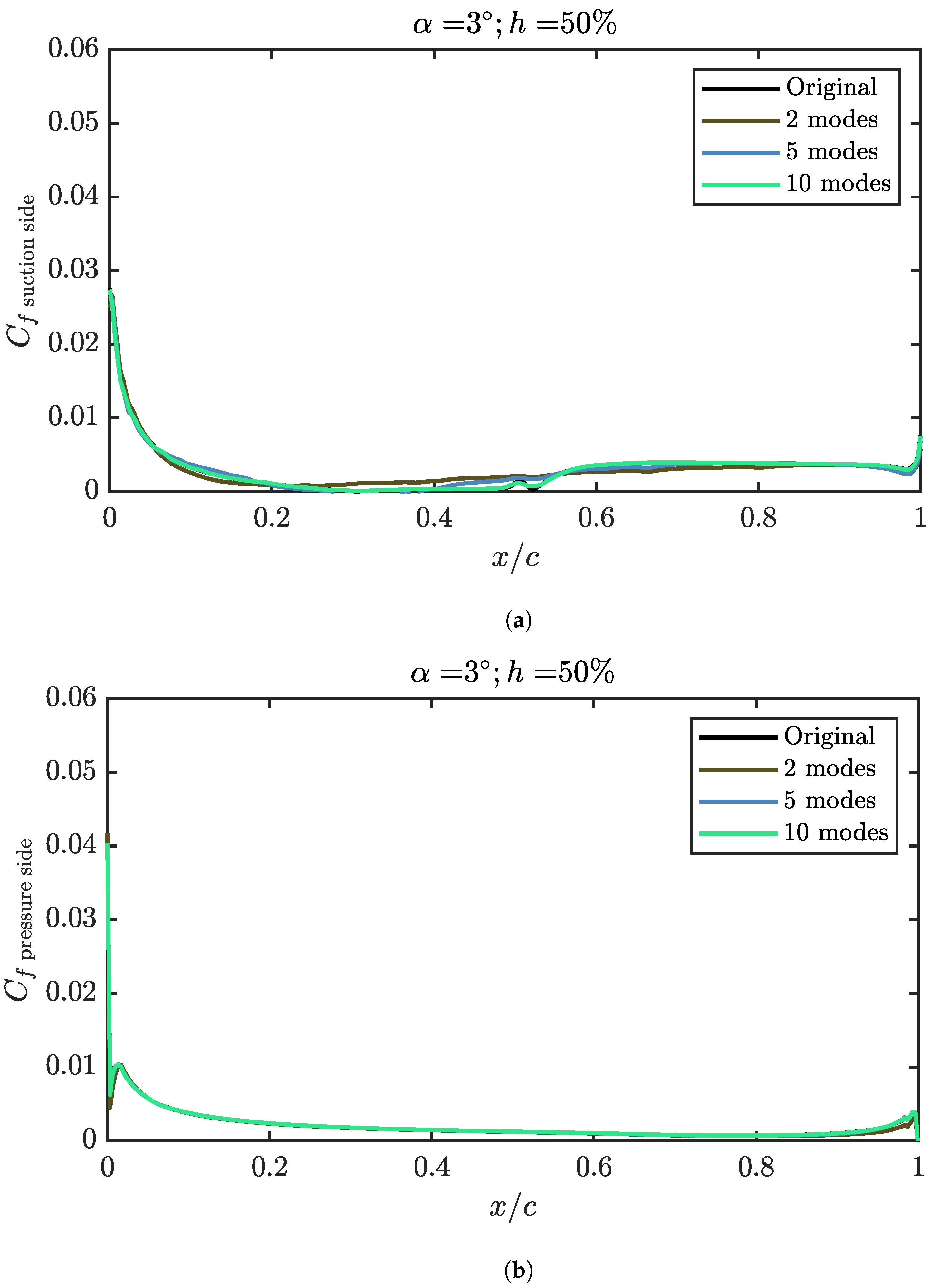
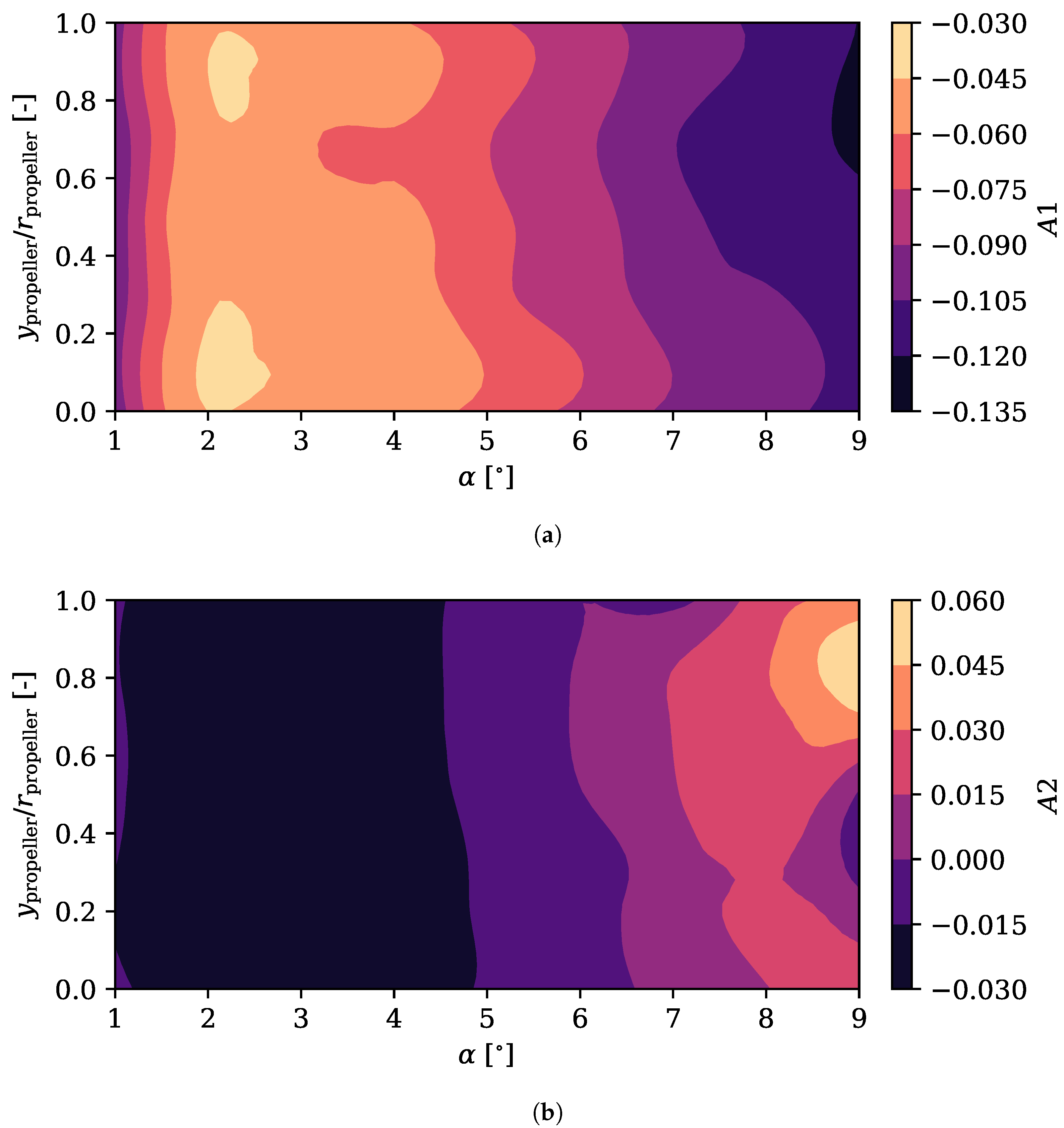
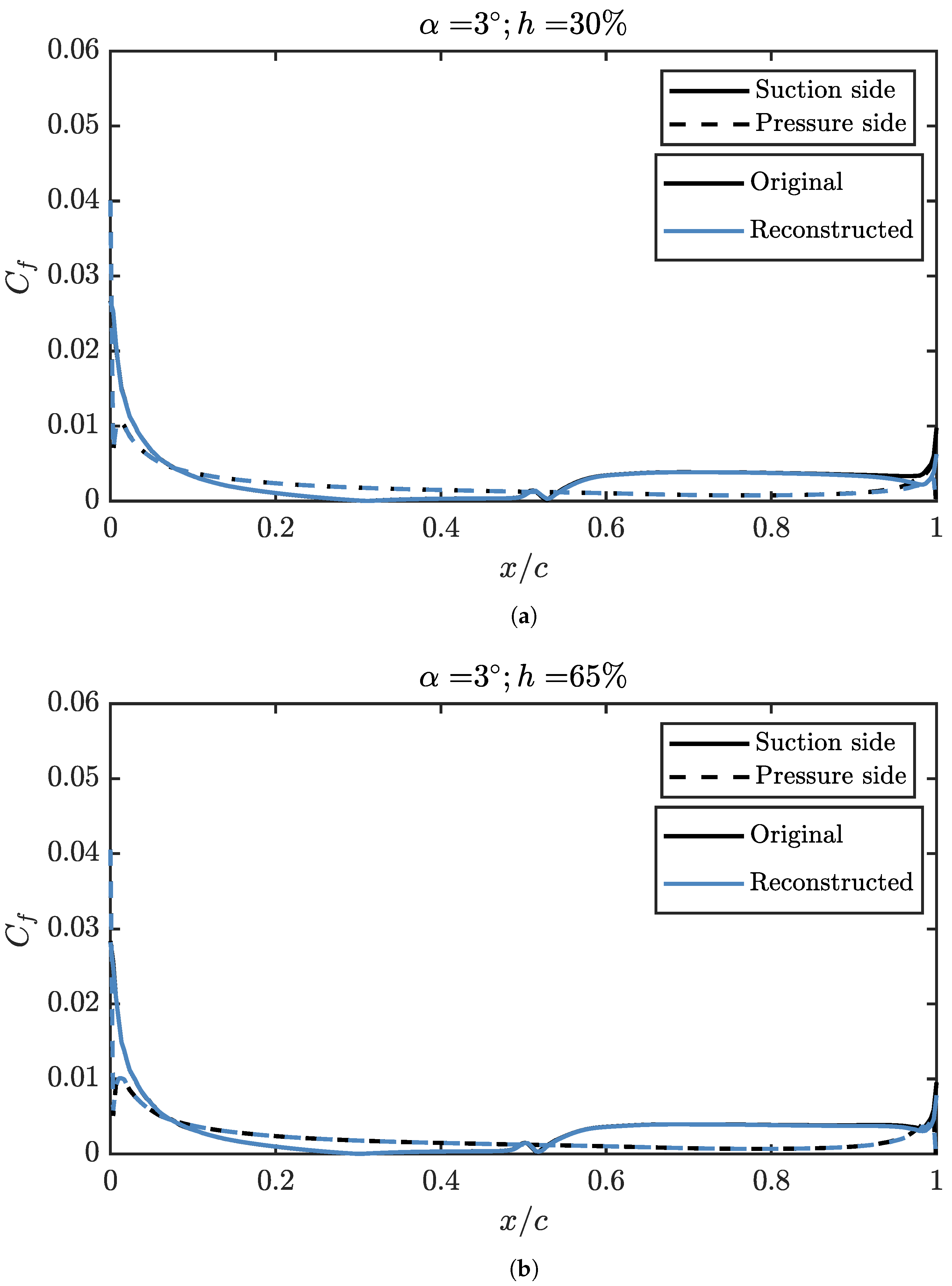
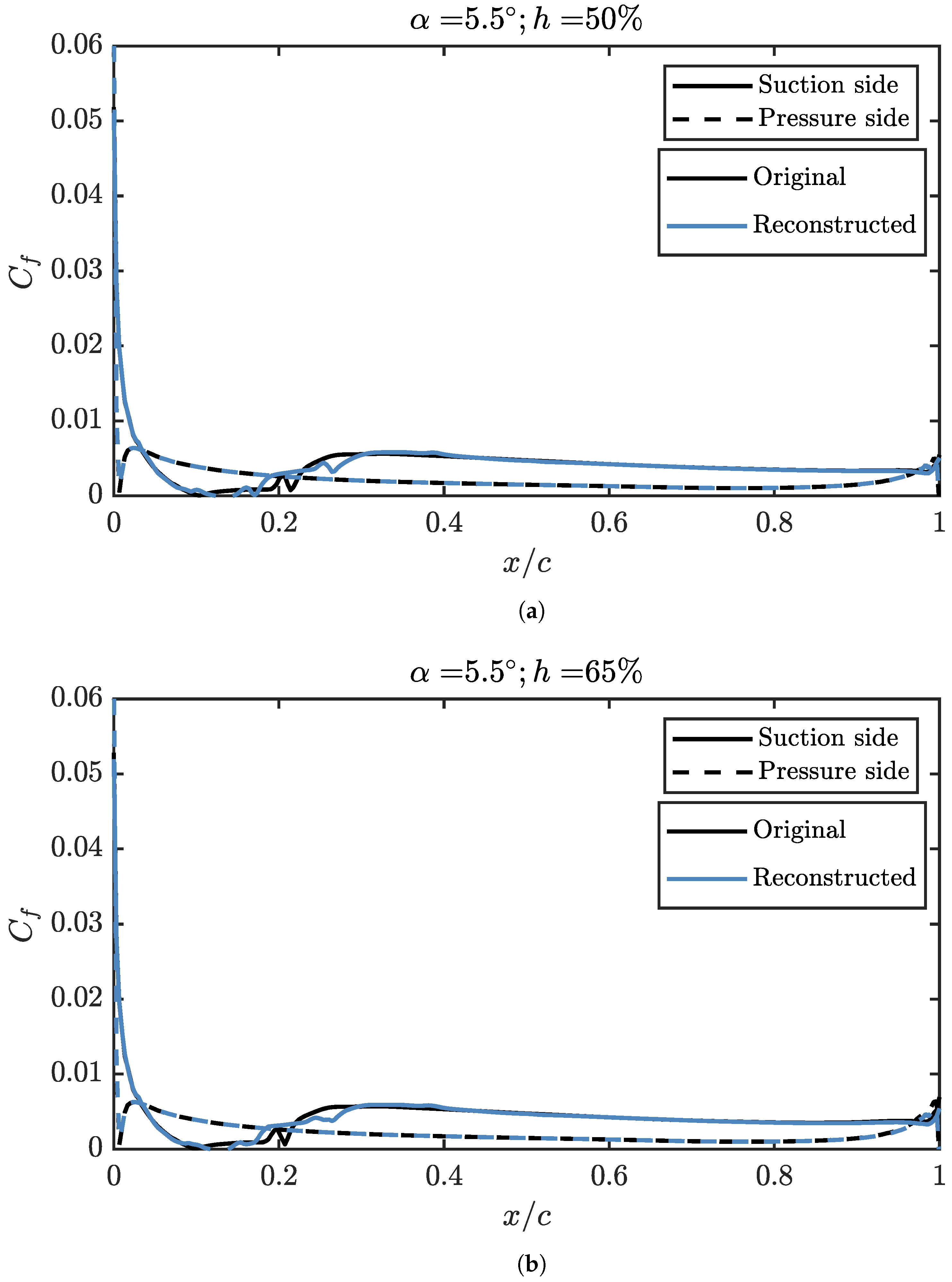
4.2. Friction Coefficient Analysis Using POD
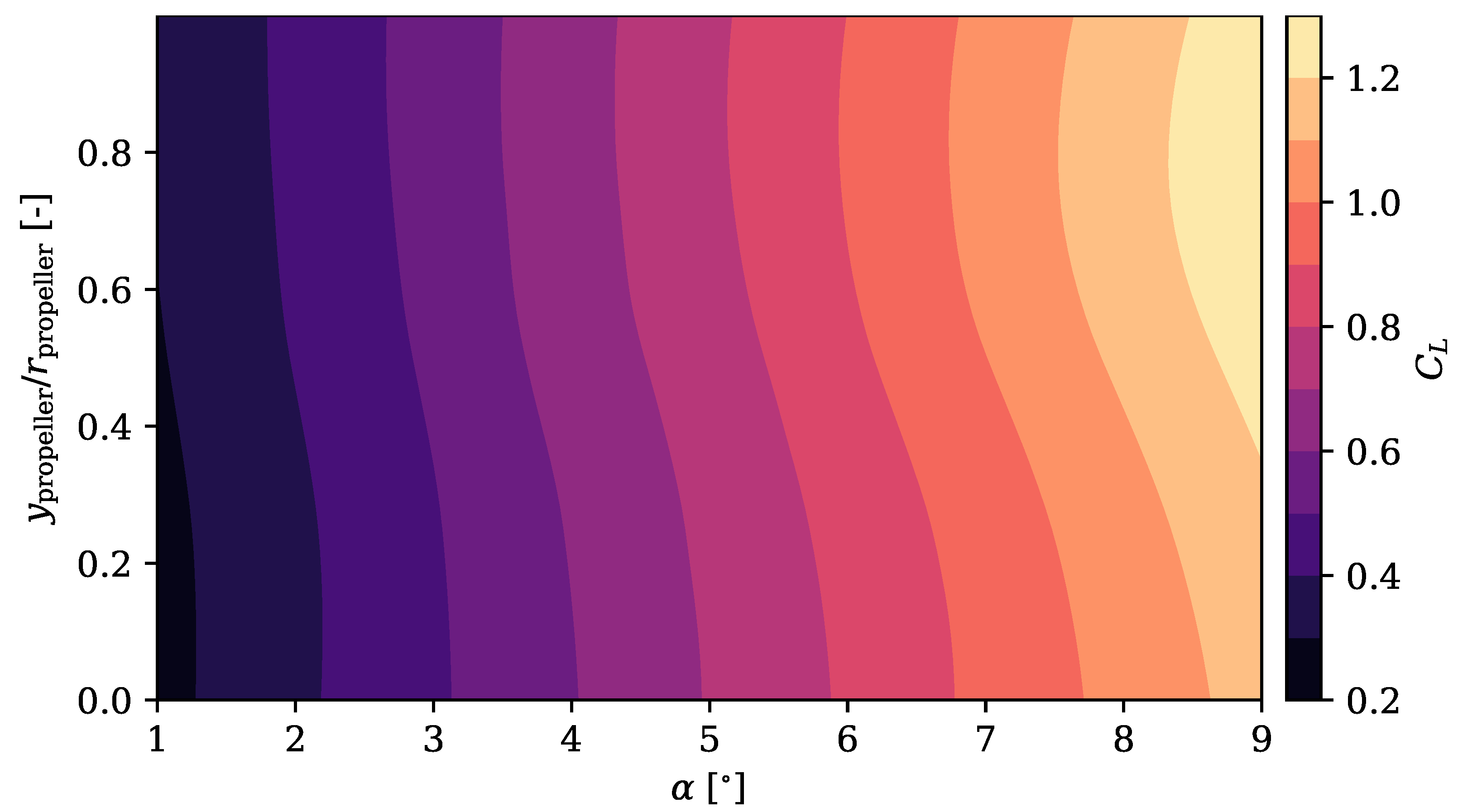
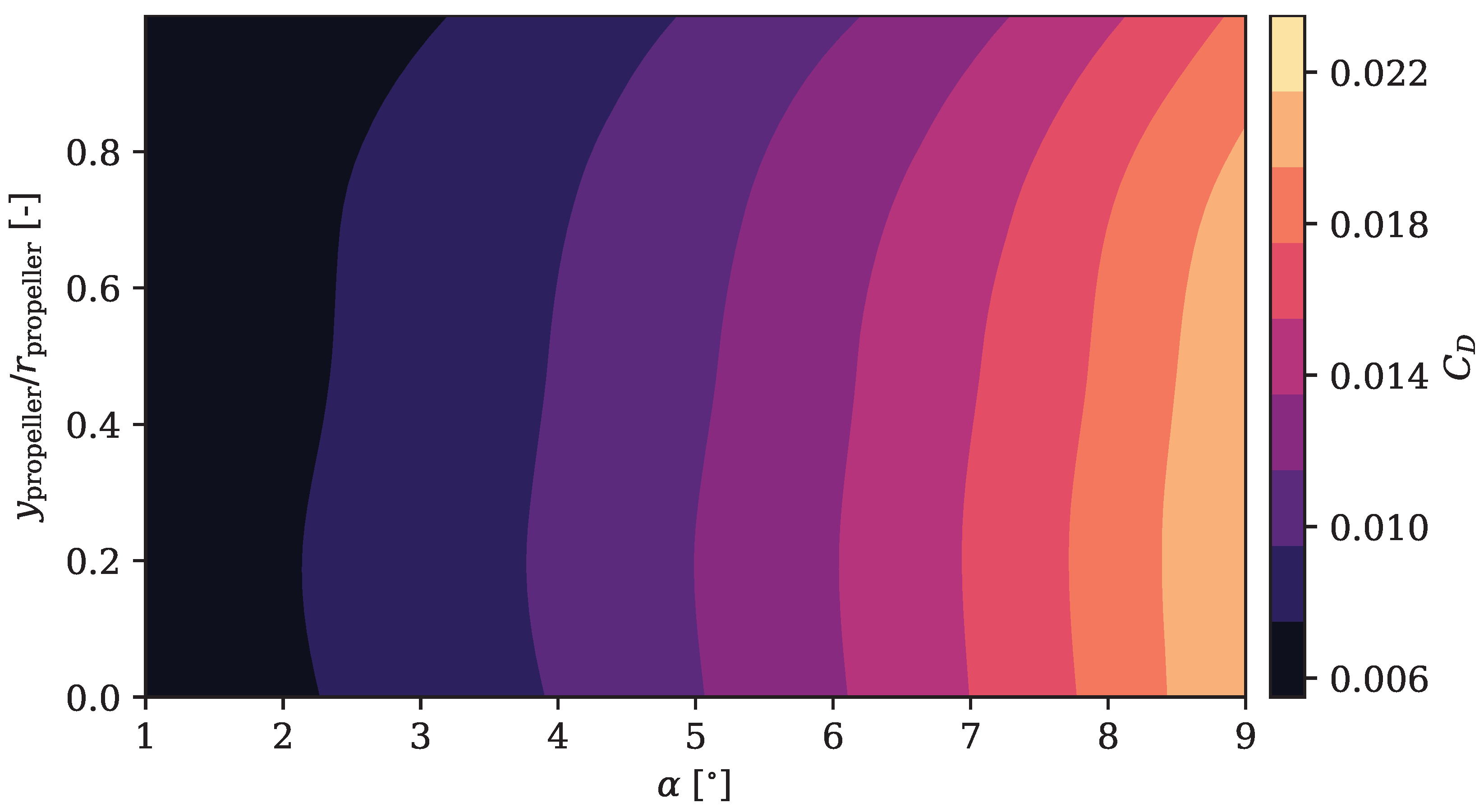
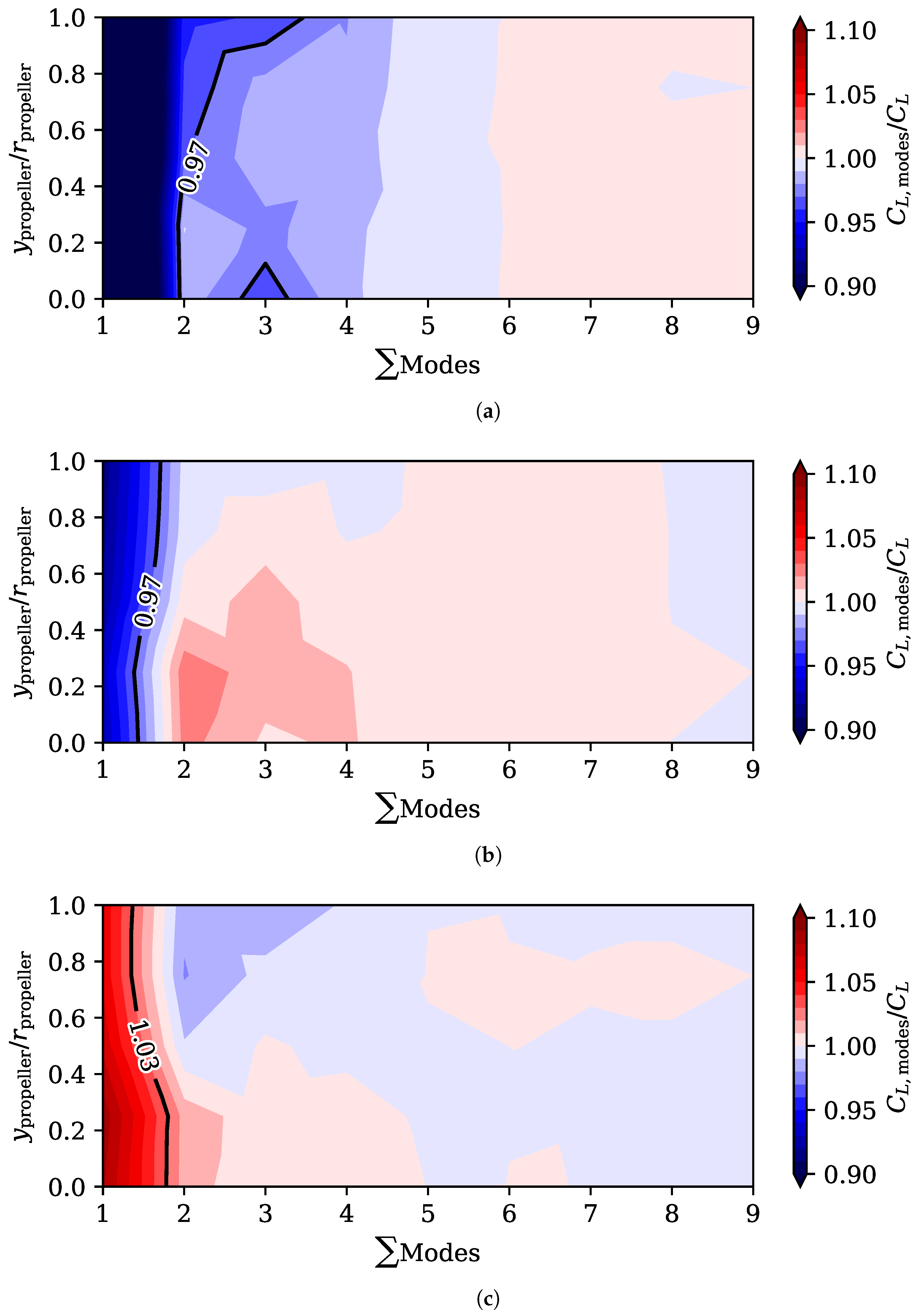
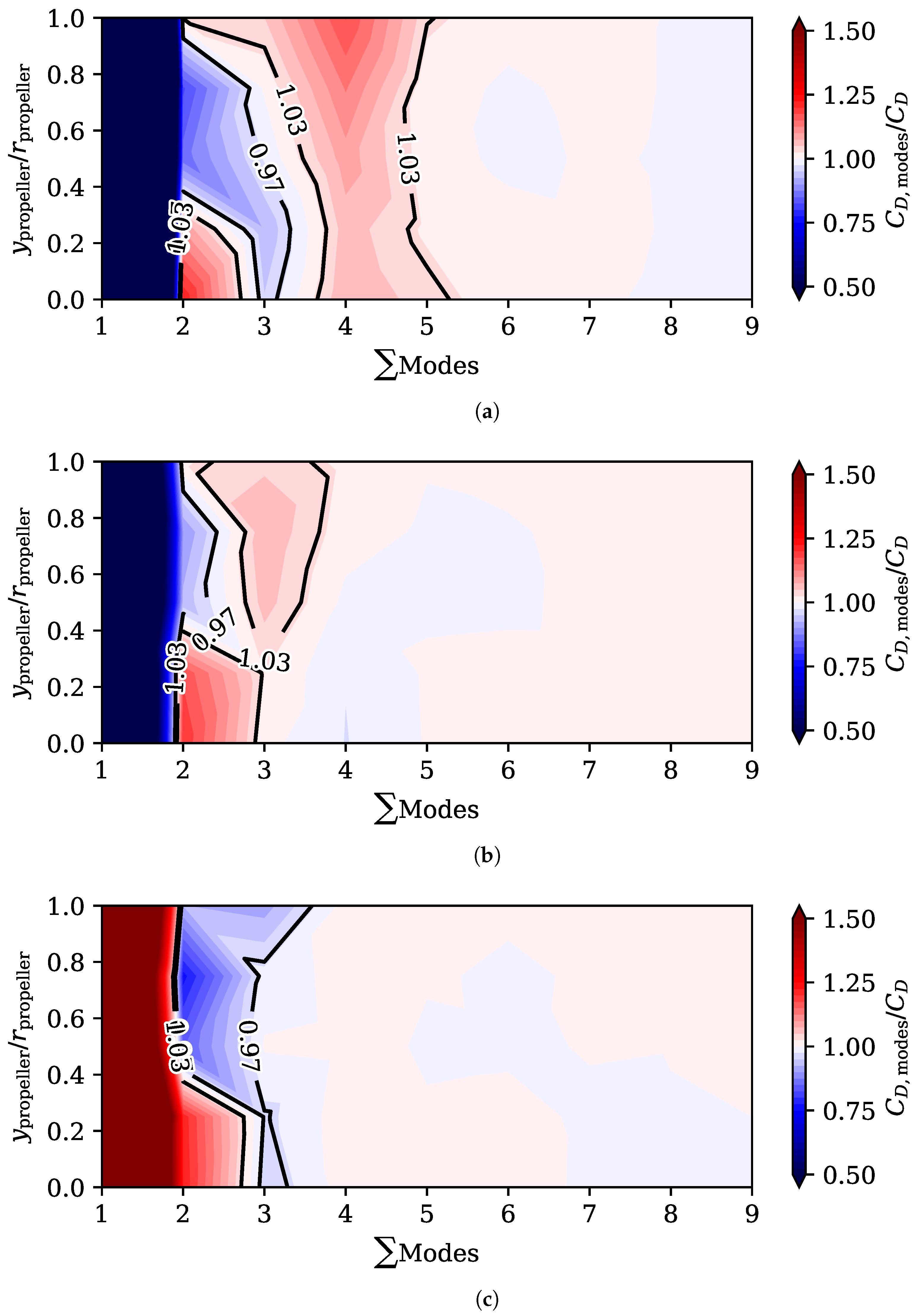
4.3. Lift and Drag Coefficient Analysis and Reconstruction
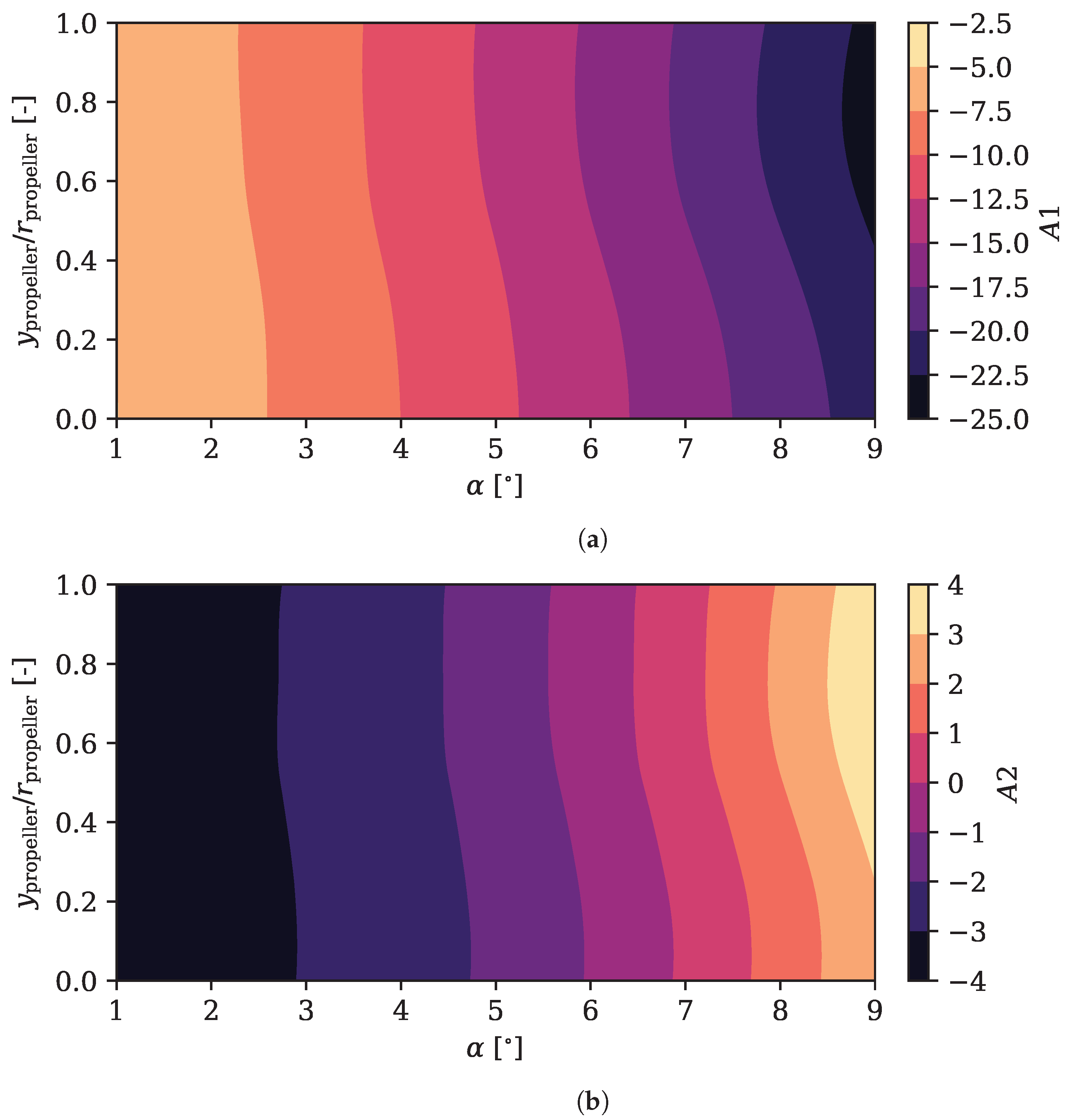
4.4. Interpolation of and with a Surrogate Model
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviations | |
| BCG | Boston Consulting Group |
| BLI | Boundary layer ingestion |
| BEMT | Blade Element Model Theory |
| CFD | Computational fluid dynamics |
| DEP | Distributed electrical propulsion |
| ERA | Environmentally Responsible Aviation |
| HE | Hybrid electric |
| ITDS | Information Technology Development Solutions |
| LSB | Laminar separation bubble |
| NASA | National Aeronautics and Space Administration |
| POD | Proper Orthogonal Decomposition |
| RANS | Reynols-averaged Navier-Stokes |
| UAV | Unmanned aerial vehicle |
| Roman letters | |
| Configuration coefficients matrix | |
| Configuration coefficient of mode i | |
| 🜇 | Aspect ratio |
| b | Wingspan |
| c | Chord |
| Covariance matrix | |
| Lift coefficient | |
| Drag coefficient | |
| Parasitic drag coefficient of the aircraft without the wing | |
| Parasitic drag coefficient of the wing | |
| Pressure coefficient | |
| Friction coefficient | |
| D | Drag |
| e | Oswald efficiency factor |
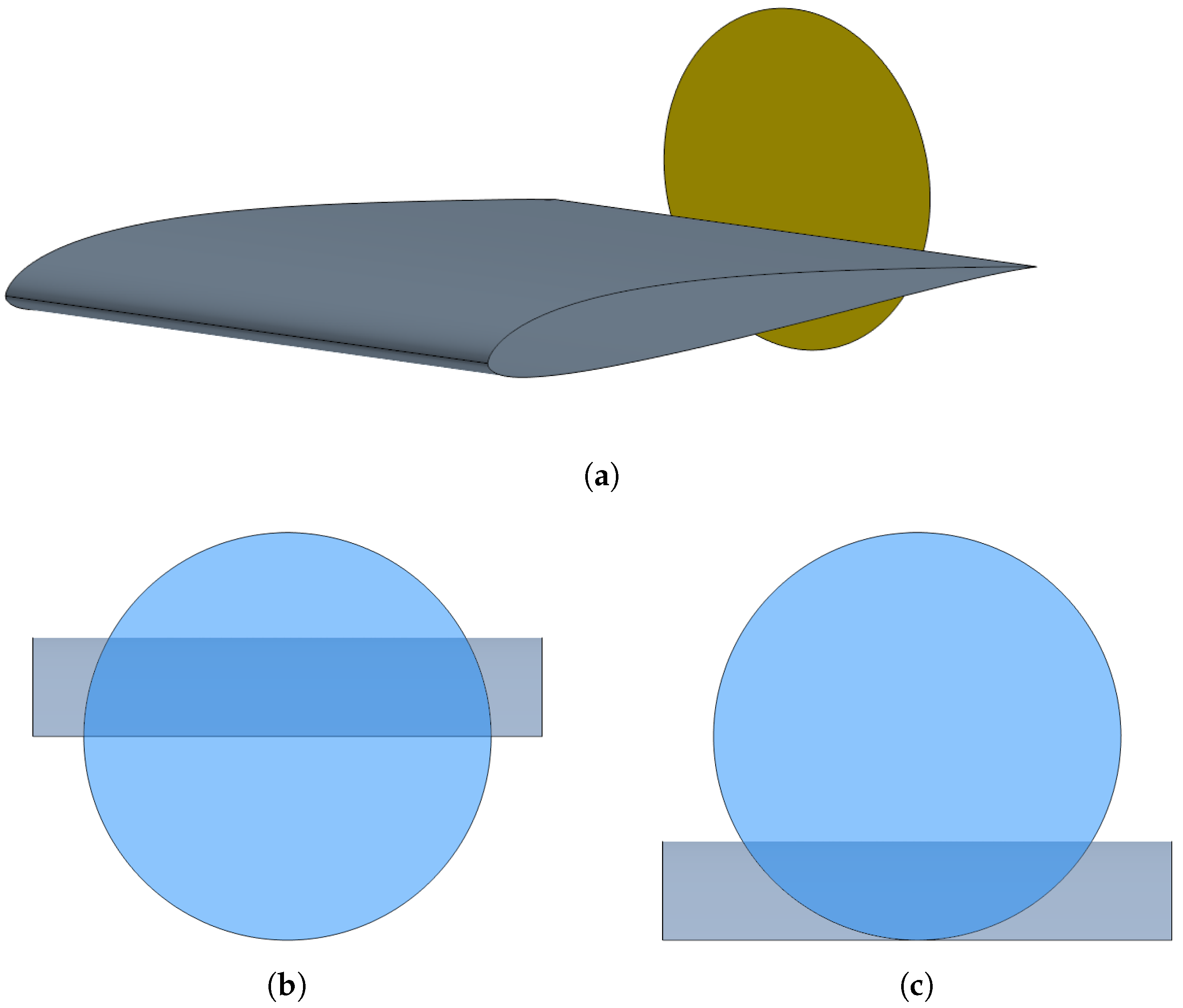
| h | Relative height of the propeller shaft |
| Propeller radius | |
| Reynolds | |
| S | Wing surface |
| T | Thrust |
| Total fluctuating kinetic energy | |
| Dataset matrix | |
| Air speed | |
| x | Position across the chord |
| Position of the propeller shaft above the trailing edge | |
| Greek letters | |
| Angle of attack | |
| Λ | Eigenvalues matrix |
| Eigenvalue | |
| Φ | Eigenvector matrix |
| Eigenvector | |
| Density | |
References
- Nickol, C.L.; Haller, W.J. Assessment of the performance potential of advanced subsonic transport concepts for NASA’s environmentally responsible aviation project. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; pp. 1–21. [Google Scholar] [CrossRef] [Green Version]
- Amoukteh, A.; Janda, J.; Vicent, J. Drones Go to work. Harv. Bus. Rev. 2017, 77–94. [Google Scholar]
- Kim, H.D.; Perry, A.T.; Ansell, P.J. A Review of Distributed Electric Propulsion Concepts for Air Vehicle Technology. In Proceedings of the AIAA/IEEE Electric Aircraft Technologies Symposium, Cincinnati, OH, USA, 9–11 July 2018; pp. 1–21. [Google Scholar] [CrossRef] [Green Version]
- Ko, Y.Y.A. The Multidisciplinary Design Optimization of a Distributed Propulsion Blended-Wing-Body Aircraft. Ph.D. Thesis, Virginia Tech, Blacksburg, Virginia, 2003. [Google Scholar]
- Moore, K.R.; Ning, A. Distributed electric propulsion effects on traditional aircraft through multidisciplinary optimization. In Proceedings of the AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef] [Green Version]
- Kirner, R.; Raffaelli, L.; Rolt, A.; Laskaridis, P.; Doulgeris, G.; Singh, R. An assessment of distributed propulsion: Part B—Advanced propulsion system architectures for blended wing body aircraft configurations. Aerosp. Sci. Technol. 2016, 50, 212–219. [Google Scholar] [CrossRef]
- Stoll, A.M.; Bevirt, J.; Moore, M.D.; Fredericks, W.J.; Borer, N.K. Drag Reduction Through Distributed Electric Propulsion. In Proceedings of the 14th AIAA Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 16–20 June 2014; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Stoll, A.M. Comparison of CFD and experimental results of the leap tech distributed electric propulsion blown wing. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015; pp. 22–26. [Google Scholar] [CrossRef] [Green Version]
- Amoozgar, M.; Friswell, M.I.; Fazelzadeh, S.A.; Khodaparast, H.H.; Mazidi, A.; Cooper, J.E. Aeroelastic stability analysis of electric aircraft wings with distributed electric propulsors. Aerospace 2021, 8, 100. [Google Scholar] [CrossRef]
- Ausserer, J.K.; Harmon, F.G. Integration, validation, and testing of a hybrid-electric propulsion system for a small remotely-piloted aircraft. In Proceedings of the 10th Annual International Energy Conversion Engineering Conference, Atlanta, GA, USA, 30 July–1 August 2012; pp. 1–11. [Google Scholar] [CrossRef]
- Kim, C.; Namgoong, E.; Lee, S.; Kim, T.; Kim, H. Fuel Economy Optimization for Parallel Hybrid Vehicles with CVT; SAE Technical Paper 1999-01-1148; SAE International: Warrendale, PA, USA, 1999. [Google Scholar] [CrossRef]
- Budziszewski, N.; Friedrichs, J. Modelling of a boundary layer ingesting propulsor. Energies 2018, 11, 708. [Google Scholar] [CrossRef] [Green Version]
- Teperin, L. Investigation on Boundary Layer Ingestion Propulsion for UAVs. In Proceedings of the International Micro Air Vehicle Conference and Flight Competition (IMAV), Toulouse, France, 18–21 September 2017; pp. 293–300. [Google Scholar]
- Elsalamony, M.; Teperin, L. 2D Numerical Investigation of Boundary Layer Ingestion Propulsor on Airfoil. In Proceedings of the 7th European Conference for Aeronautics and Space Sciences (EUCASS), Milan, Italy, 3–6 July 2017; pp. 1–11. [Google Scholar] [CrossRef]
- Hall, D.K.; Huang, A.C.; Uranga, A.; Greitzer, E.M.; Drela, M.; Sato, S. Boundary layer ingestion propulsion benefit for transport aircraft. J. Propuls. Power 2017, 33, 1118–1129. [Google Scholar] [CrossRef]
- Broatch, A.; García-Tíscar, J.; Roig, F.; Sharma, S. Dynamic mode decomposition of the acoustic field in radial compressors. Aerosp. Sci. Technol. 2019, 90, 388–400. [Google Scholar] [CrossRef]
- Torregrosa, A.J.; Broatch, A.; García-Tíscar, J.; Gomez-Soriano, J. Modal decomposition of the unsteady flow field in compression-ignited combustion chambers. Combust. Flame 2018, 188, 469–482. [Google Scholar] [CrossRef]
- Zhu, Z.; Midlam-Mohler, S.; Canova, M. Development of physics-based three-way catalytic converter model for real-time distributed temperature prediction using proper orthogonal decomposition and collocation. Int. J. Engine Res. 2021, 22, 873–889. [Google Scholar] [CrossRef]
- Rulli, F.; Fontanesi, S.; D’Adamo, A.; Berni, F. A critical review of flow field analysis methods involving proper orthogonal decomposition and quadruple proper orthogonal decomposition for internal combustion engines. Int. J. Engine Res. 2021, 22, 222–242. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.; Teh, K.Y.; Ge, P.; Zhao, F.; Hung, D.L. Temporal evolution analysis of in-cylinder flow by means of proper orthogonal decomposition. Int. J. Engine Res. 2021, 22, 1714–1730. [Google Scholar] [CrossRef]
- Malouin, B.; Trépanier, J.Y.; Gariépy, M. Interpolation of transonic flows using a proper orthogonal decomposition method. Int. J. Aerosp. Eng. 2013, 2013. [Google Scholar] [CrossRef]
- Mifsud, M.; Zimmermann, R.; Görtz, S. Speeding-up the computation of high-lift aerodynamics using a residual-based reduced-order model. CEAS Aeronaut. J. 2015, 6, 3–16. [Google Scholar] [CrossRef]
- Mifsud, M.J.; MacManus, D.G.; Shaw, S.T. A variable-fidelity aerodynamic model using proper orthogonal decomposition. Int. J. Numer. Methods Fluids 2016, 82, 646–663. [Google Scholar] [CrossRef] [Green Version]
- Tiseira, A.O.; García-Cuevas, L.M.; Quintero, P.; Varela, P. Series-hybridisation, distributed electric propulsion and boundary layer ingestion in long-endurance, small remotely piloted aircraft: Fuel consumption improvements. Aerosp. Sci. Technol. 2022, 120. [Google Scholar] [CrossRef]
- Serrano, J.R.; Tiseira, A.O.; García-Cuevas, L.M.; Varela, P. Computational Study of the Propeller Position Effects in Wing-Mounted, Distributed Electric Propulsion with Boundary Layer Ingestion in a 25 kg Remotely Piloted Aircraft. Drones 2021, 5, 56. [Google Scholar] [CrossRef]
- UAV Factory USA LLC. Penguin C UAS. Available online: https://www.uavfactory.com (accessed on 12 January 2012).
- AERTEC Solutions. RPAS TARSIS 25. Available online: https://aertecsolutions.com/rpas/rpas-sistema-aereos-tripulados-remotamente/rpas-tarsis25/ (accessed on 12 January 2012).
- Lyon, C.A.; Broeren, A.P.; Giguere, P.; Gopalarathnam, A.; Selig, M.S. Summary of Low-Speed Airfoil Data—Volume 3; SoarTech Publications: Virginia Beach, VA, USA, 1997; p. 315. [Google Scholar]
- Selig, M.S.; Donovan, J.F.; Fraser, D.B. Airfoils at Low Speeds; H.A. Stokey: Virginia Beach, VA, USA, 1989; pp. 1–408. [Google Scholar]
- Selig, M.S. Low Reynolds Number Airfoil Design Lecture Notes—Various Approaches to Airfoil Design. Available online: https://m-selig.ae.illinois.edu/pubs/Selig-2003-VKI-LRN-Airfoil-Design-Lecture-Series.pdf (accessed on 12 January 2012).
- Sutton, D.M. Experimental Characterization of the Effects of Freestream Turbulence Intensity on the SD7003 Airfoil at Low Reynolds Numbers. Master’s Thesis, Univeristy of Toronto, Toronto, ON, Canada, 2015. [Google Scholar]
- Ananda, G.K.; Sukumar, P.P.; Selig, M.S. Measured aerodynamic characteristics of wings at low Reynolds numbers. Aerosp. Sci. Technol. 2015, 42, 392–406. [Google Scholar] [CrossRef]
- Stajuda, M.; Obidowski, D.; Karczewski, M.; Józwik, K. Modified virtual blade method for propeller modelling. Mech. Mech. Eng. 2018, 22, 603–617. [Google Scholar] [CrossRef]
- Harmon, F.G.; Frank, A.A.; Chattot, J.J. Conceptual design and simulation of a small hybrid-electric unmanned aerial vehicle. J. Aircr. 2006, 43, 1490–1498. [Google Scholar] [CrossRef]
- Niţă, M.; Scholz, D. Estimating the Oswald Factor from Basic Aircraft Geometrical Parameters. In Deutscher Luft- und Raumfahrtkongress; DGLR: Berlin, Germany, 2012. [Google Scholar]
- Hoerner, S. Fluid-Dynamic Drag; Hoerner Fluid Dynamics: Bakersfield, CA, USA, 1965; pp. 7-2–7-9. [Google Scholar]
- XFLR5. Available online: https://www.xflr5.tech/xflr5.htm (accessed on 12 January 2012).
- Drela, M. XFOIL Subsonic Airfoil Development System. Available online: https://web.mit.edu/drela/Public/web/xfoil/ (accessed on 12 January 2012).



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameters | |
|---|---|
| Aspect ratio | 10 |
| Wing area | |
| Wingspan | 2 |
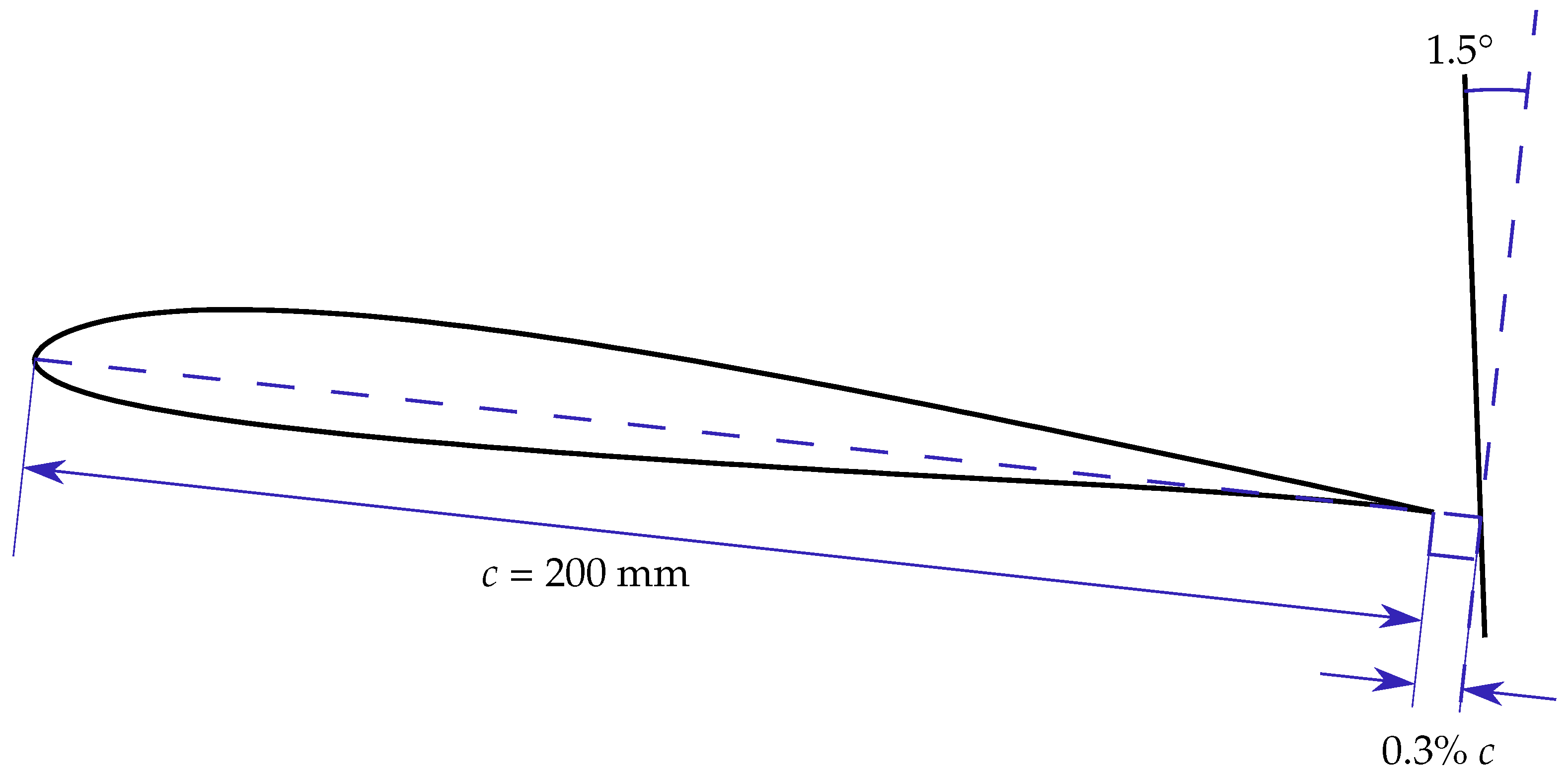
| Wing chord | |
| Maximum takeoff mass | 25 |
| Wing airfoil | SD7003 |
| Propeller radius | 40 |
| Number of propellers | 13 |
| Aerodynamic Parameters | |
| (fuselage, empennage, others) | 0.011 |
| Oswald efficiency factor (e) | 0.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serrano, J.R.; García-Cuevas, L.M.; Bares, P.; Varela, P. Propeller Position Effects over the Pressure and Friction Coefficients over the Wing of an UAV with Distributed Electric Propulsion: A Proper Orthogonal Decomposition Analysis. Drones 2022, 6, 38. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6020038
Serrano JR, García-Cuevas LM, Bares P, Varela P. Propeller Position Effects over the Pressure and Friction Coefficients over the Wing of an UAV with Distributed Electric Propulsion: A Proper Orthogonal Decomposition Analysis. Drones. 2022; 6(2):38. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6020038
Chicago/Turabian StyleSerrano, José Ramón, Luis Miguel García-Cuevas, Pau Bares, and Pau Varela. 2022. "Propeller Position Effects over the Pressure and Friction Coefficients over the Wing of an UAV with Distributed Electric Propulsion: A Proper Orthogonal Decomposition Analysis" Drones 6, no. 2: 38. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6020038