
Capacity Optimization of Next-Generation UAV Communication Involving Non-Orthogonal Multiple Access †
 , , , , , ,
, , , , , ,
Abstract
:1. Introduction
1.1. Related Literature
1.2. Motivation and Contribution
- The altitude optimization problem is formulated as a convex optimization problem and the optimal altitude is evaluated.
- The sum user capacity is optimized while satisfying the minimum QoS constraints.
- The comparative analysis of heuristic algorithms is proposed to optimize the user-pairing matrix.
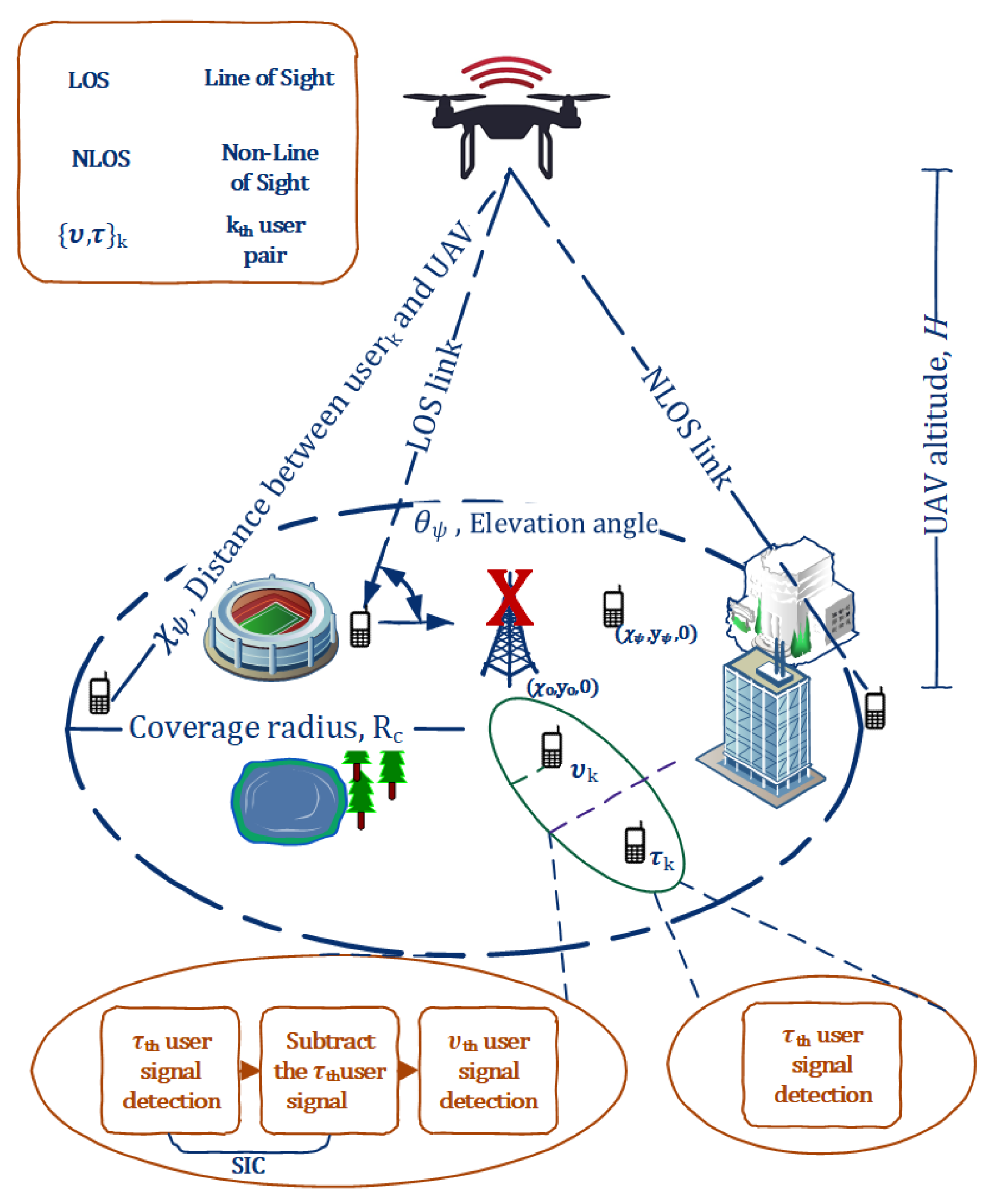
2. System Model
Transmission Model
3. Proposed Methodology
| Algorithm 1: Heuristic based joint user-pairing and altitude optimization (HUAO). |
 |
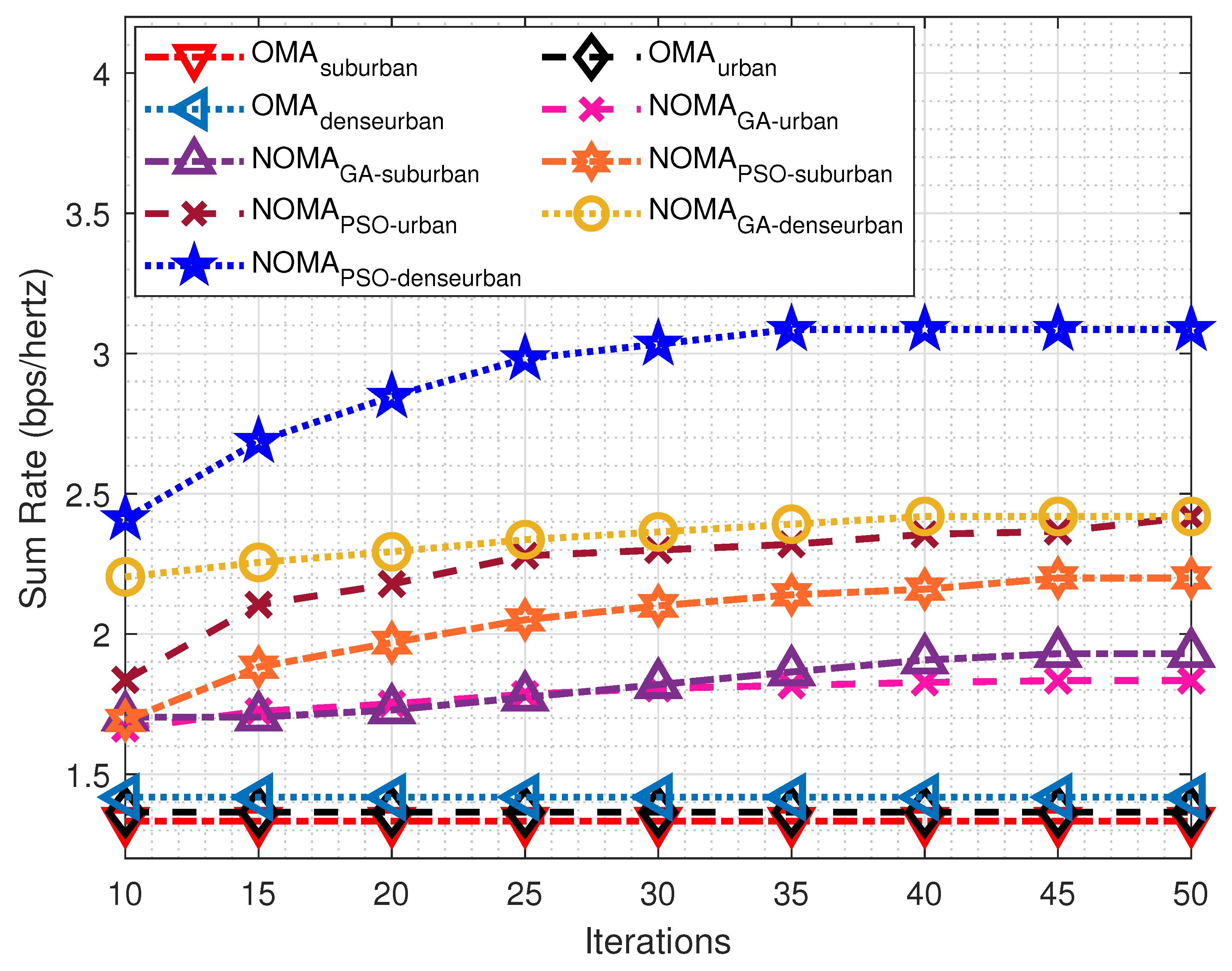
4. Simulation Results and Discussion
4.1. Analysis of Pairing Schemes
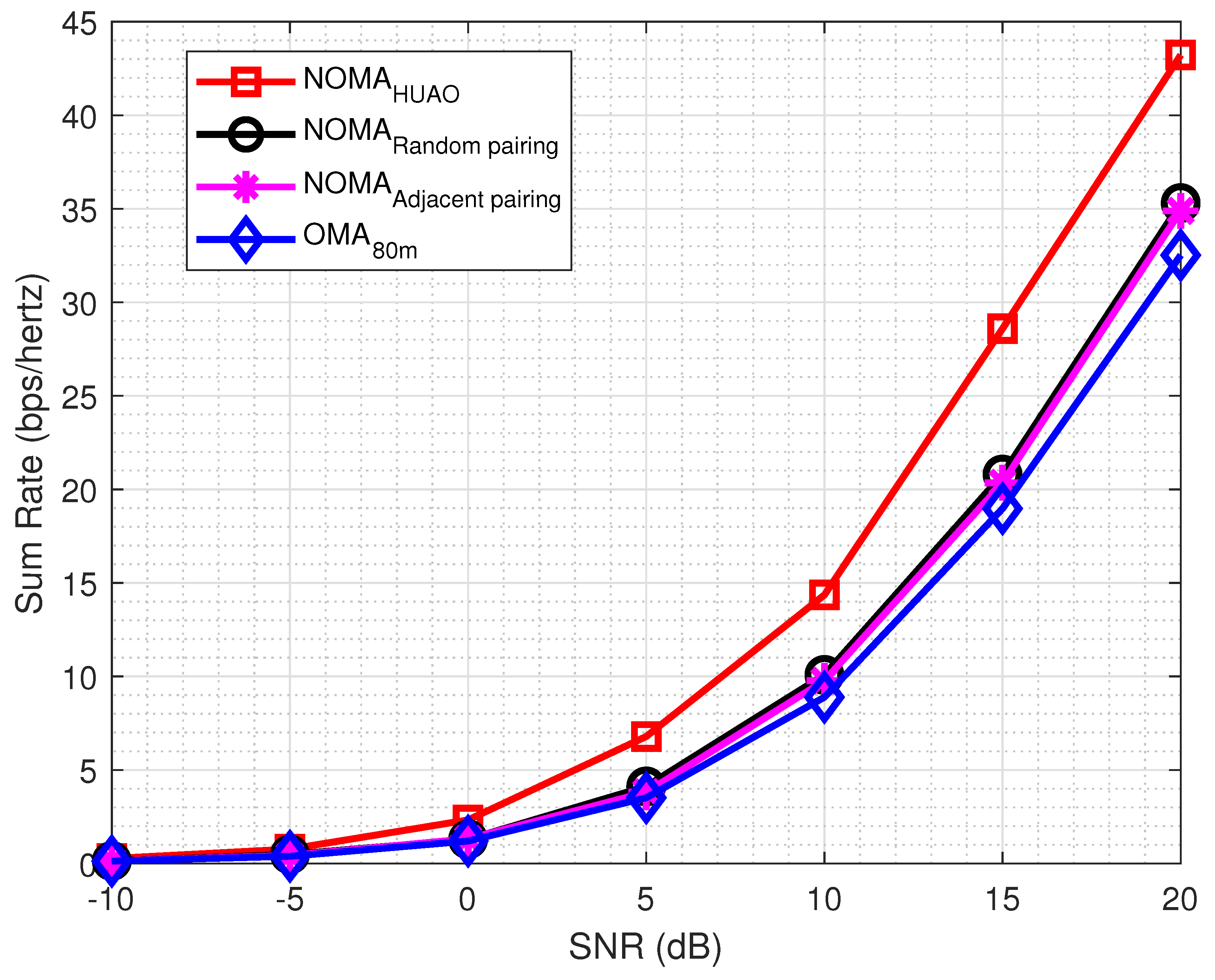
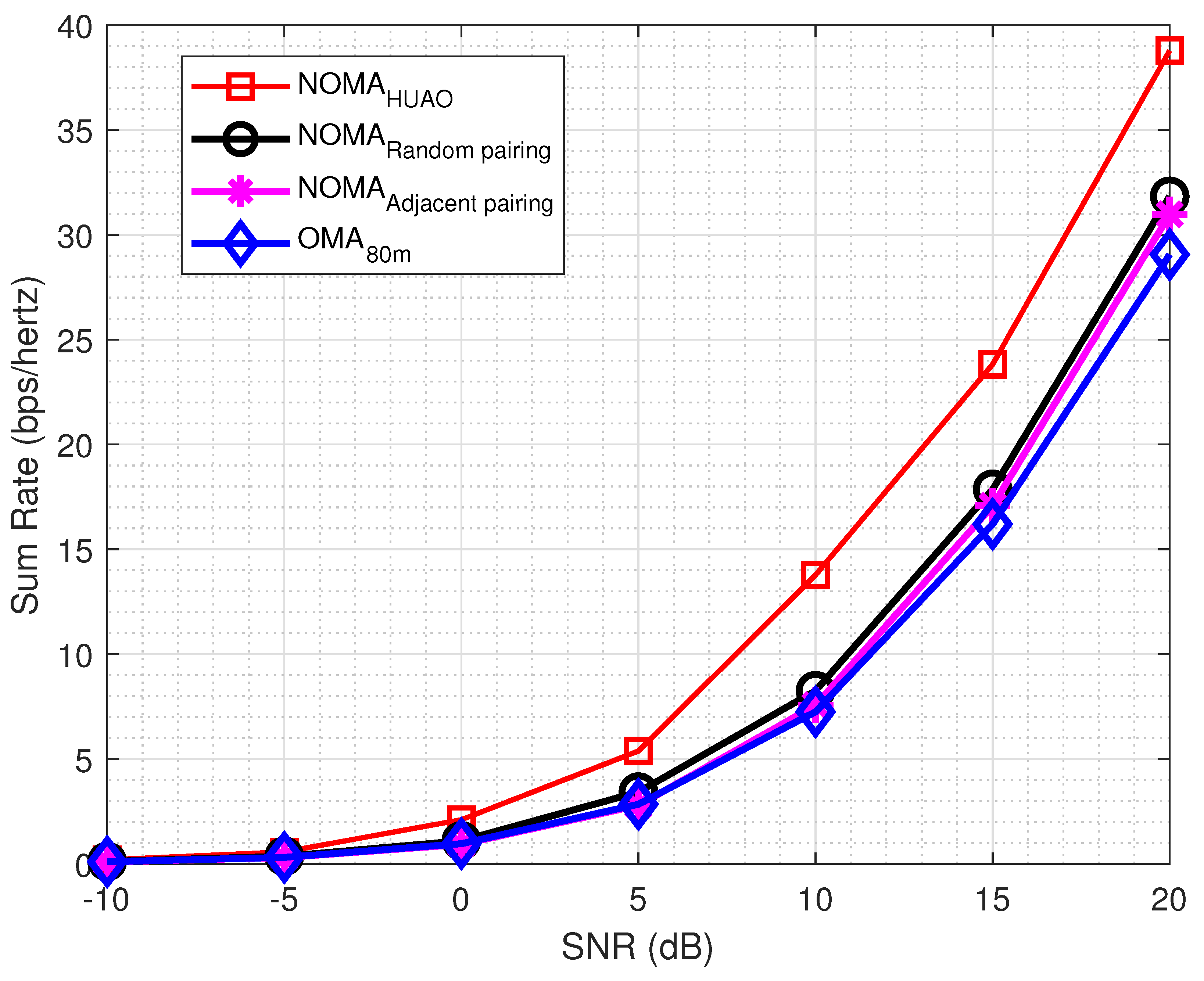
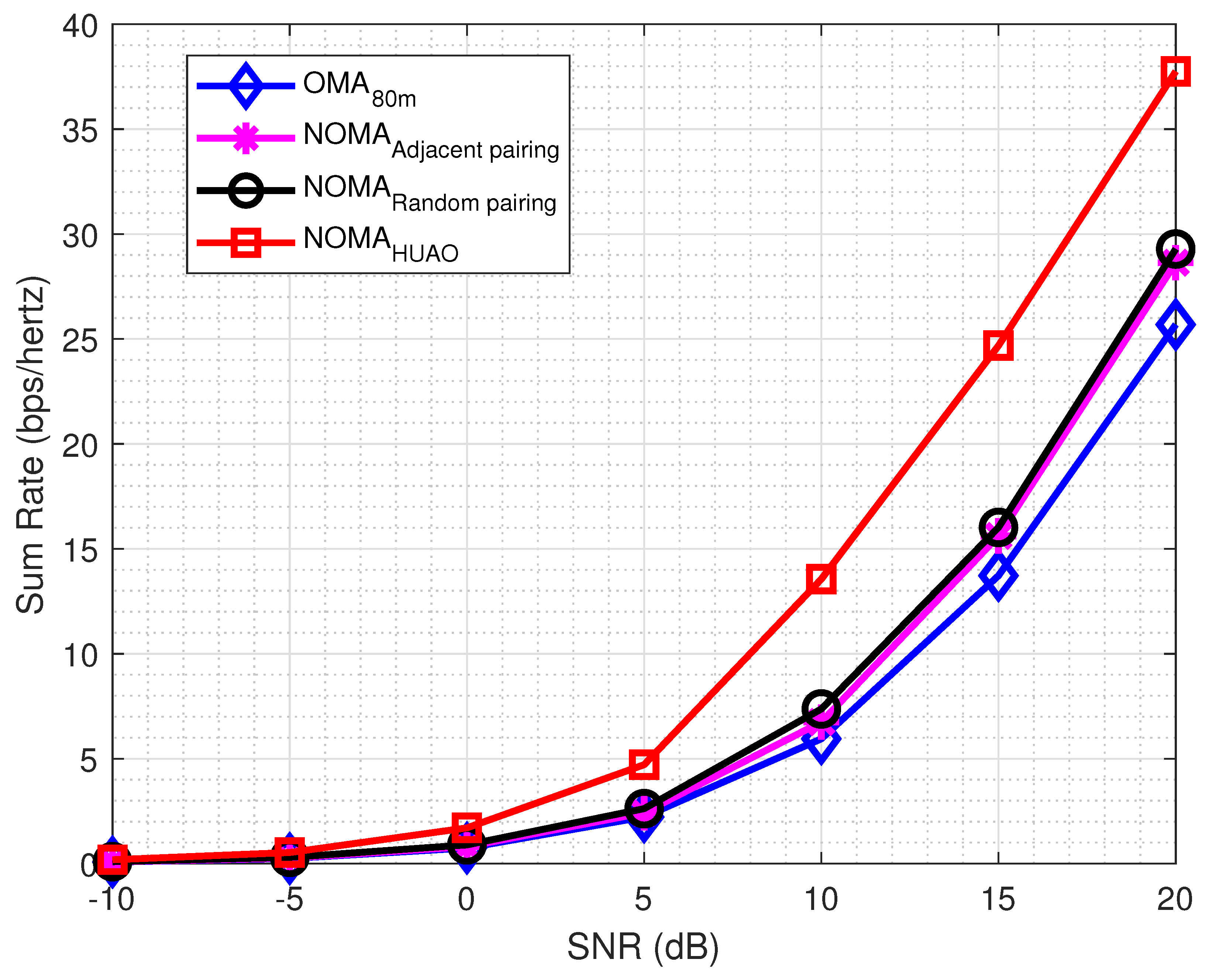
4.2. Impact of Varied SNRs: NOMA vs. OMA
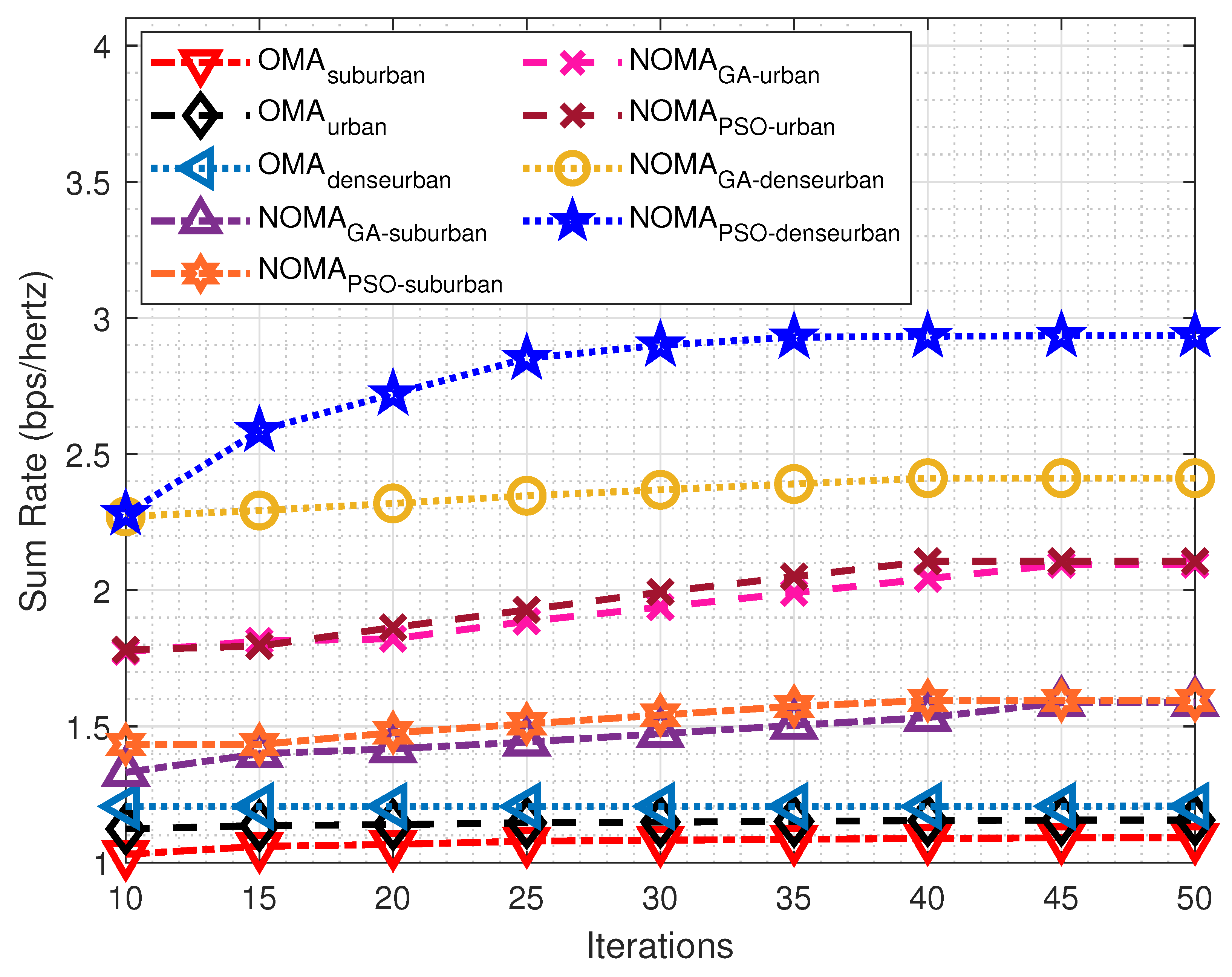
4.3. Impact of Environments: NOMA vs. OMA
4.4. Optimized NOMA Altitudes
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khan, W.U.; Jameel, F.; Li, X.; Bilal, M.; Tsiftsis, T.A. Joint spectrum and energy optimization of NOMA-enabled small-cell networks with QoS guarantee. IEEE Trans. Veh. Technol. 2021, 70, 8337–8342. [Google Scholar] [CrossRef]
- Huang, T.; Yang, W.; Wu, J.; Ma, J.; Zhang, X.; Zhang, D. A survey on green 6G network: Architecture and technologies. IEEE Access 2019, 7, 175758–175768. [Google Scholar] [CrossRef]
- Nawaz, S.J.; Sharma, S.K.; Mansoor, B.; Patwary, M.N.; Khan, N.M. Non-coherent and backscatter communications: Enabling ultra-massive connectivity in 6G wireless networks. IEEE Access 2021, 9, 38144–38186. [Google Scholar] [CrossRef]
- Mahmood, A.; Hong, Y.; Ehsan, M.K.; Mumtaz, S. Optimal resource allocation and task segmentation in iot enabled mobile edge cloud. IEEE Trans. Veh. Technol. 2021, 70, 13294–13303. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutorials 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Khan, W.U.; Lagunas, E.; Ali, Z.; Javed, M.A.; Ahmed, M.; Chatzinotas, S.; Ottersten, B.; Popovski, P. Opportunities for physical layer security in UAV communication enhanced with intelligent reflective surfaces. arXiv 2022, arXiv:2203.16907. [Google Scholar]
- Wei, Z.; Zhu, M.; Zhang, N.; Wang, L.; Zou, Y.; Meng, Z.; Wu, H.; Feng, Z. UAV Assisted Data Collection for Internet of Things: A Survey. IEEE Internet Things J. 2022, 9, 15460–15483. [Google Scholar] [CrossRef]
- Li, J.; Niu, Y.; Wu, H.; Ai, B.; Chen, S.; Feng, Z.; Zhong, Z.; Wang, N. Mobility Support for Millimeter Wave Communications: Opportunities and Challenges. IEEE Commun. Surv. Tutor. 2022, 24, 1816–1842. [Google Scholar] [CrossRef]
- McEnroe, P.; Wang, S.; Liyanage, M. A Survey on the Convergence of Edge Computing and AI for UAVs: Opportunities and Challenges. IEEE Internet Things J. 2022, 9, 15435–15459. [Google Scholar] [CrossRef]
- Mahmood, A.; Usman, M.Q.; Shahzad, K.; Saddique, N. Evolution of optimal 3D placement of UAV with minimum transmit power. Int. J. Wirel. Commun. Mob. Comput. 2019, 7, 13–18. [Google Scholar] [CrossRef]
- Sohail, M.F.; Leow, C.Y.; Won, S. A Cat Swarm Optimization based transmission power minimization for an aerial NOMA communication system. Veh. Commun. 2022, 33, 100426. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef]
- Sohail, M.F.; Leow, C.Y.; Won, S. Energy-efficient non-orthogonal multiple access for UAV communication system. IEEE Trans. Veh. Technol. 2019, 68, 10834–10845. [Google Scholar] [CrossRef]
- Mahmood, A.; Khan, S.S.; Usman, M.Q.; Khan, S.Z.A.; Sarfaraz, M.S.; Shahzad, K.; Saddique, N. Optimal Placement of UAV for Coverage Maximization with Minimum Path Loss. Wirel. Commun. Mob. Comput. 2019, 7, 27–31. [Google Scholar] [CrossRef]
- Khan, W.U.; Jamshed, M.A.; Mahmood, A.; Lagunas, E.; Chatzinotas, S.; Ottersten, B. Backscatter-aided NOMA V2X communication under channel estimation errors. arXiv 2022, arXiv:2202.01586. [Google Scholar]
- Ahmed, M.; Khan, W.U.; Ihsan, A.; Li, X.; Li, J.; Tsiftsis, T.A. Backscatter sensors communication for 6G low-powered NOMA-enabled IoT networks under imperfect SIC. arXiv 2021, arXiv:2109.12711. [Google Scholar] [CrossRef]
- Islam, S.R.; Avazov, N.; Dobre, O.A.; Kwak, K.S. Power-domain non-orthogonal multiple access (NOMA) in 5G systems: Potentials and challenges. IEEE Commun. Surv. Tutor. 2016, 19, 721–742. [Google Scholar] [CrossRef]
- Khan, W.U.; Lagunas, E.; Mahmood, A.; Chatzinotas, S.; Ottersten, B. Integration of backscatter communication with multi-cell NOMA: A spectral efficiency optimization under imperfect SIC. arXiv 2021, arXiv:2109.11509. [Google Scholar]
- Wang, K.; Li, H.; Ding, Z.; Xiao, P. Reinforcement learning based latency minimization in secure NOMA-MEC systems with hybrid SIC. IEEE Trans. Wirel. Commun. 2022. [Google Scholar] [CrossRef]
- Li, X.; Liu, M.; Deng, C.; Mathiopoulos, P.T.; Ding, Z.; Liu, Y. Full-duplex cooperative NOMA relaying systems with I/Q imbalance and imperfect SIC. IEEE Wirel. Commun. Lett. 2019, 9, 17–20. [Google Scholar] [CrossRef]
- Khan, W.U.; Jamshed, M.A.; Lagunas, E.; Chatzinotas, S.; Li, X.; Ottersten, B. Energy efficiency optimization for backscatter enhanced NOMA cooperative V2X communications under imperfect CSI. IEEE Trans. Intell. Transp. Syst. 2022. [Google Scholar] [CrossRef]
- Ali, Z.; Khan, W.U.; Ihsan, A.; Waqar, O.; Sidhu, G.A.S.; Kumar, N. Optimizing resource allocation for 6G NOMA-enabled cooperative vehicular networks. IEEE Open J. Intell. Transp. Syst. 2021, 2, 269–281. [Google Scholar] [CrossRef]
- Nawaz, H.; Ali, H.M.; Laghari, A.A. UAV communication networks issues: A review. Arch. Comput. Methods Eng. 2021, 28, 1349–1369. [Google Scholar] [CrossRef]
- Sohail, M.F.; Leow, C.Y. Maximized fairness for NOMA based drone communication system. In Proceedings of the 2017 IEEE 13th Malaysia International Conference on Communications (MICC), Johor Bahru, Malaysia, 28–30 November 2017; pp. 119–123. [Google Scholar]
- He, H.; Zhang, S.; Zeng, Y.; Zhang, R. Joint altitude and beamwidth optimization for UAV-enabled multiuser communications. IEEE Commun. Lett. 2017, 22, 344–347. [Google Scholar] [CrossRef]
- Cicek, C.T.; Kutlu, T.; Gultekin, H.; Tavli, B.; Yanikomeroglu, H. Backhaul-aware placement of a UAV-BS with bandwidth allocation for user-centric operation and profit maximization. arXiv 2018, arXiv:1810.12395. [Google Scholar]
- Duan, R.; Wang, J.; Jiang, C.; Yao, H.; Ren, Y.; Qian, Y. Resource allocation for multi-UAV aided IoT NOMA uplink transmission systems. IEEE Internet Things J. 2019, 6, 7025–7037. [Google Scholar] [CrossRef]
- Amantayeva, A.; Yerzhanova, M.; Kizilirmak, R.C. UAV location optimization for UAV-to-vehicle multiple access channel with visible light Communication. In Proceedings of the 2019 Wireless Days (WD), Manchester, UK, 24–26 April 2019; pp. 1–4. [Google Scholar]
- Zhong, X.; Guo, Y.; Li, N.; Chen, Y.; Li, S. Deployment optimization of UAV relay for malfunctioning base station: Model-free approaches. IEEE Trans. Veh. Technol. 2019, 68, 11971–11984. [Google Scholar] [CrossRef]
- Chowdhury, M.M.U.; Bulut, E.; Guvenc, I. Trajectory optimization in UAV-assisted cellular networks under mission duration constraint. In Proceedings of the 2019 IEEE Radio and Wireless Symposium (RWS), Orlando, FL, USA, 20–23 January 2019; pp. 1–4. [Google Scholar]
- Mounchili, S.; Hamouda, S. New user grouping scheme for better user pairing in NOMA systems. In Proceedings of the 2020 International Wireless Communications and Mobile Computing (IWCMC), Limassol, Cyprus, 15–19 June 2020; pp. 820–825. [Google Scholar]
- Mounchili, S.; Hamouda, S. Efficient pairing distance for better radio capacity in noma systems. In Proceedings of the 2020 4th International Conference on Advanced Systems and Emergent Technologies (IC_ASET), Hammamet, Tunisia, 15–18 December 2020; pp. 383–388. [Google Scholar]
- Chinnadurai, S.; Selvaprabhu, P.; Lee, M.H. A novel joint user pairing and dynamic power allocation scheme in MIMO-NOMA system. In Proceedings of the 2017 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 18–20 October 2017; pp. 951–953. [Google Scholar]
- Shahab, M.B.; Kader, M.F.; Shin, S.Y. A virtual user pairing scheme to optimally utilize the spectrum of unpaired users in non-orthogonal multiple access. IEEE Signal Process. Lett. 2016, 23, 1766–1770. [Google Scholar] [CrossRef]
- Mouni, N.S.; Kumar, A.; Upadhyay, P.K. Adaptive user pairing for NOMA systems with imperfect SIC. IEEE Wirel. Commun. Lett. 2021, 10, 1547–1551. [Google Scholar] [CrossRef]
- Azam, I.; Shahab, M.B.; Shin, S.Y. User pairing and power allocation for capacity maximization in uplink NOMA. In Proceedings of the 2019 42nd International Conference on Telecommunications and Signal Processing (TSP), Budapest, Hungary, 1–3 July 2019; pp. 690–694. [Google Scholar]
- Nasser, A.; Muta, O.; Gacanin, H.; Elsabrouty, M. Joint user pairing and power allocation with compressive sensing in NOMA systems. IEEE Wirel. Commun. Lett. 2020, 10, 151–155. [Google Scholar] [CrossRef]
- Sohail, M.F.; Leow, C.Y.; Won, S. Non-orthogonal multiple access for unmanned aerial vehicle assisted communication. IEEE Access 2018, 6, 22716–22727. [Google Scholar] [CrossRef]
- Khan, W.U.; Liu, J.; Jameel, F.; Khan, M.T.R.; Ahmed, S.H.; Jäntti, R. Secure backscatter communications in multi-cell NOMA networks: Enabling link security for massive IoT networks. In Proceedings of the IEEE INFOCOM 2020-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 213–218. [Google Scholar]
- Mahmood, A.; Ahmed, A.; Naeem, M.; Amirzada, M.R.; Al-Dweik, A. Weighted utility aware computational overhead minimization of wireless power mobile edge cloud. Comput. Commun. 2022, 190, 178–189. [Google Scholar] [CrossRef]
- Mohammed, A.; Mehmood, A.; Pavlidou, F.N.; Mohorcic, M. The role of high-altitude platforms (HAPs) in the global wireless connectivity. Proc. IEEE 2011, 99, 1939–1953. [Google Scholar] [CrossRef]
- Khan, W.U.; Ihsan, A.; Nguyen, T.N.; Javed, M.A.; Ali, Z. NOMA-enabled backscatter communications for green transportation in automotive-Industry 5.0. IEEE Trans. Ind. Inform. 2022. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | OF | UP | PA | AL | PO | BW | CA |
|---|---|---|---|---|---|---|---|
| [13] | EE | ✓ | ✓ | ✓ | - | - | - |
| [14] | CCO | - | - | - | - | - | ✓ |
| [15] | EE | - | ✓ | - | - | - | - |
| [18] | SE | - | ✓ | - | - | - | - |
| [24] | F-SM | - | - | ✓ | - | - | - |
| [25] | TM | - | - | ✓ | - | ✓ | - |
| [26] | TM | - | - | - | ✓ | - | ✓ |
| [27] | CO | - | ✓ | - | - | - | ✓ |
| [28] | CO | - | - | - | ✓ | - | - |
| [29] | CO | - | - | - | ✓ | - | - |
| [30] | CCO | - | - | - | ✓ | - | - |
| [31] | CO | ✓ | - | - | - | - | - |
| [32] | SM | ✓ | - | - | - | - | - |
| [33] | EE | ✓ | ✓ | - | - | - | - |
| [34] | SM | ✓ | - | - | - | - | - |
| [35] | CO | ✓ | - | - | - | - | - |
| [36] | CO | ✓ | ✓ | - | - | - | - |
| [37] | SM | ✓ | ✓ | - | - | - | - |
| [38] | EE, CCO | - | ✓ | ✓ | - | - | - |
| OW | SM | ✓ | ✓ | ✓ | - | - | - |
| Parameters | Values | ||
|---|---|---|---|
| K (users) | 20 | ||
| N (candidate solutions) | 20 | ||
| Crossover | Single point | ||
| Selection | Roulette wheel selection | ||
| Mutation rate | 1 % | ||
| (PSO: inertia) | 0.7 | ||
| , (PSO: constants) | Random | ||
| 1W | |||
| (Free Space pathloss exponent) | 2 | ||
| Environment | suburban | urban | dense urban |
| 4.886 | 9.6177 | 12.087 | |
| 0.429 | 0.1581 | 0.1139 | |
| 0.1 | 1 | 1.6 | |
| 21 | 20 | 23 |
| SNR | OMA | OMA | NOMA | Percentage Improvement (80 m) | Percentage Improvement (120 m) |
|---|---|---|---|---|---|
| 0 | 1.3964 | 1.2112 | 2.4111 | 42.08% | 49.77% |
| 5 | 3.9619 | 3.4893 | 6.7874 | 41.63% | 48.59% |
| 10 | 10.1226 | 8.9331 | 15.786 | 35.88% | 43.41% |
| 15 | 20.6275 | 18.9403 | 28.591 | 27.85% | 33.75% |
| 20 | 34.9609 | 32.6579 | 43.9261 | 20.41% | 25.65% |
| SNR | OMA | OMA | NOMA | Percentage Improvement (80 m) | Percentage Improvement (120 m) |
|---|---|---|---|---|---|
| 0 | 1.2376 | 1.152 | 2.1064 | 41.25% | 45.31% |
| 5 | 3.774 | 3.2793 | 5.3827 | 29.89% | 39.08% |
| 10 | 9.4486 | 8.6886 | 13.7745 | 31.41% | 36.92% |
| 15 | 20.1091 | 18.5457 | 24.8915 | 19.21% | 25.49% |
| 20 | 33.5871 | 31.8631 | 38.783 | 13.40% | 17.84% |
| SNR | OMA | OMA | NOMA | Percentage Improvement (80 m) | Percentage Improvement (120 m) |
|---|---|---|---|---|---|
| 0 | 1.259 | 1.0674 | 1.7033 | 26.08% | 37.33% |
| 5 | 3.5599 | 3.0732 | 4.7133 | 24.47% | 34.80% |
| 10 | 9.6177 | 8.254 | 13.5567 | 29.06% | 39.11% |
| 15 | 19.6127 | 17.8929 | 24.684 | 20.54% | 27.51% |
| 20 | 33.8681 | 31.4524 | 37.7492 | 10.28% | 16.68% |
| OMA | NOMA | ||
|---|---|---|---|
| Suburban | Urban | Dense Urban | |
| 80 m | 43.3014 m | 94.2402 m | 119.1598 m |
| 120 m | 49.7267 m | 103.4393 m | 158.4576 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarfraz, M.; Sohail, M.F.; Alam, S.; Javvad ur Rehman, M.; Ghauri, S.A.; Rabie, K.; Abbas, H.; Ansari, S. Capacity Optimization of Next-Generation UAV Communication Involving Non-Orthogonal Multiple Access. Drones 2022, 6, 234. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6090234
Sarfraz M, Sohail MF, Alam S, Javvad ur Rehman M, Ghauri SA, Rabie K, Abbas H, Ansari S. Capacity Optimization of Next-Generation UAV Communication Involving Non-Orthogonal Multiple Access. Drones. 2022; 6(9):234. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6090234
Chicago/Turabian StyleSarfraz, Mubashar, Muhammad Farhan Sohail, Sheraz Alam, Muhammad Javvad ur Rehman, Sajjad Ahmed Ghauri, Khaled Rabie, Hasan Abbas, and Shuja Ansari. 2022. "Capacity Optimization of Next-Generation UAV Communication Involving Non-Orthogonal Multiple Access" Drones 6, no. 9: 234. https://0-doi-org.brum.beds.ac.uk/10.3390/drones6090234