
Nature-Inspired Algorithms from Oceans to Space: A Comprehensive Review of Heuristic and Meta-Heuristic Optimization Algorithms and Their Potential Applications in Drones




Abstract
:1. Introduction
2. Classifications of Nature-Inspired Algorithms
2.1. Bio-Based
2.1.1. Evolution-Based
Genetic Algorithm (GA)
Differential Evolution (DE)
Evolutionary Programming (EP)
Other Algorithms
2.1.2. Organ-Based
Artificial Immune Systems (AIS)
Clonal Selection Algorithm
Other Algorithms
2.1.3. Behavior-Based
Biogeography-Based Optimization
Symbiotic Organisms Search
Other Algorithms
2.1.4. Disease-Based
2.1.5. Microorganism and Nano-Organism Based
2.1.6. Insect-Based
Ant Colony Optimization (ACO)
Artificial Bee Colony (ABC)
Moth Flame Optimization Algorithm
Other Algorithms
2.1.7. Avian Animal-Based
Cuckoo Search
Green Herons Optimization Algorithm
Bat Algorithm
Other Algorithms
2.1.8. Aquatic Animals-Based Algorithms
Whale Optimization Algorithm
Krill Herd
Fish-Swarm Algorithm
Other Algorithms
Terrestrial Animals-Based
Grey Wolf Optimizer
Shuffle Frog-Leaping Algorithm
Cat Swarm Optimization
Other Algorithms
2.1.9. Plant-Based
Flower Pollination Algorithm
Invasive Weed Colonization
Other Algorithms
2.2. Ecosystem-Based
2.2.1. Water Cycle Algorithm
2.2.2. Other Algorithms
2.3. Social-Based and Others
2.3.1. Particle Swarm Optimization
2.3.2. Teaching–Learning-Based Optimization
2.3.3. Other Algorithms
2.4. Physics-Based
2.4.1. Simulated Annealing Algorithm (SAA)
2.4.2. Gravitational Search Algorithm (GSA)
2.4.3. Big Bang—Big Crunch
2.4.4. Other Algorithms
2.5. Chemistry-Based
2.6. Math-Based
2.7. Music-Based
2.8. Sport-Based
2.9. Hybrid Algorithms
2.10. Constraint Handling Techniques (CHT)
3. Comparison between Algorithms
3.1. Benchmark Functions
3.2. Results
4. Nature-Inspired Algorithms in Drones and Aerospace Engineering
4.1. Design and Manufacturing
4.1.1. Conceptual Design Optimization
4.1.2. Multidisciplinary Design Optimization (MDO)
4.2. Engine Modeling and Propulsion
4.3. Structure
Structure Design
4.4. Aerodynamics
4.4.1. Airfoil Shape Design
4.4.2. Wing and Tail Design
4.4.3. Body Design
4.5. Guidance, Navigation, and Control (GNC)
4.5.1. Optimal Guidance and Control
4.5.2. System Identification
4.5.3. Navigation
4.6. Communication
4.6.1. Positioning and Placement
4.6.2. Managing Resources
4.6.3. Network Security and Routing
4.7. Energy Management
4.8. Infrastructure and Operation
5. Summary
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lange, K. Optimization, 2nd ed.; Springer Science & Business Media: New York, NY, USA, 2013. [Google Scholar]
- Fister, I.; Yang, X.S.; Brest, J.; Fister, D. A brief review of nature-inspired algorithms for optimization. Elektroteh. Vestnik/Electrotech. Rev. 2013, 80, 116–122. [Google Scholar]
- Yang, X.-S. (Ed.) Nature-Inspired Algorithms and Applied Optimization; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Molina, D.; Poyatos, J.; Del Ser, J.; García, S.; Hussain, A.; Herrera, F. Comprehensive Taxonomies of Nature- and Bio-inspired Optimization: Inspiration Versus Algorithmic Behavior, Critical Analysis Recommendations. Cognit. Comput. 2020, 12, 897–939. [Google Scholar] [CrossRef]
- Sörensen, K. Metaheuristics-the metaphor exposed. Int. Trans. Oper. Res. 2015, 22, 3–18. [Google Scholar] [CrossRef]
- Tzanetos, A.; Fister, I.; Dounias, G. A comprehensive database of Nature-Inspired Algorithms. Data Brief 2020, 31, 105792. [Google Scholar] [CrossRef]
- Yang, X.-S. Nature-inspired optimization algorithms: Challenges and open problems. J. Comput. Sci. 2020, 46, 101104. [Google Scholar] [CrossRef] [Green Version]
- Muller, S.D. Bio-Inspired Optimization Algorithms for Engineering Applications; Swiss Federal Institute of Technology Zurich: Zürich, Switzerland, 2002. [Google Scholar]
- Osman, I.H. Focused issue on applied meta-heuristics. Comput. Ind. Eng. 2003, 44, 205–207. [Google Scholar] [CrossRef]
- Gendreau, M.; Potvin, J.Y. Metaheuristics in combinatorial optimization. Ann. Oper. Res. 2005, 140, 189–213. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Abdel-Fatah, L.; Sangaiah, A.K. Metaheuristic Algorithms: A Comprehensive Review. In Computational Intelligence for Multimedia Big Data on the Cloud with Engineering Applications; Elsevier: Amsterdam, The Netherlands, 2018; pp. 185–231. [Google Scholar] [CrossRef]
- Espinosa, H. Nature-Inspired Computing for Control Systems; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems; MIT Press: Cambridge, MA, USA, 2019. [Google Scholar]
- Kumar, M.; Husain, M.; Upreti, N.; Gupta, D. Genetic Algorithm: Review and Application. Int. J. Inf. Technol. Knowl. Manag. 2010, 2, 451–454. [Google Scholar] [CrossRef]
- Dastanpour, A.; Mahmood, R.A.R. Feature selection based on genetic algorithm and SupportVector machine for intrusion detection system. In Proceedings of the Second International Conference on Informatics Engineering & Information Science, Kuala Lumpur, Malaysia, 12–14 November 2013; pp. 169–181. [Google Scholar]
- Umbarkar, A.J.; Sheth, P.D. Crossover Operators in Genetic Algorithms: A Review. ICTACT J. Soft Comput. 2015, 06, 1083–1092. [Google Scholar] [CrossRef]
- Deb, K.; Deb, A. Analysing mutation schemes for real-parameter genetic algorithms. Int. J. Artif. Intell. Soft Comput. 2014, 4, 1. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Mukhopadhyay, D.; Balitanas, M. Genetic algorithm: A tutorial review. Int. J. Grid Distrib. Comput. 2009, 2, 25–32. Available online: http://0-www-sersc-org.brum.beds.ac.uk/journals/IJGDC/vol2_no3/3.pdf (accessed on 20 June 2023).
- Storn, R. On the usage of differential evolution for function optimization. In Proceedings of the North American Fuzzy Information Processing, Berkeley, CA, USA, 19–22 June 1996; pp. 519–523. [Google Scholar] [CrossRef]
- Georgioudakis, M.; Plevris, V. A Comparative Study of Differential Evolution Variants in Constrained Structural Optimization. Front. Built Environ. 2020, 6, 102. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Ayaz, M.; Panwar, A.; Pant, M. A Brief Review on Multi-objective Differential Evolution. In Soft Computing: Theories and Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1027–1040. [Google Scholar] [CrossRef]
- Fogel, L.J.; Owens, A.J.; Walsh, M.J. Artificial Intelligence Through Simulated Evolution; Wiley-IEEE Press: Piscataway, NJ, USA, 1966. [Google Scholar]
- Asthana, R.G.S. Evolutionary Algorithms and Neural Networks. Soft Comput. Intell. Syst. 2000, 111–136. [Google Scholar] [CrossRef]
- Fogel, D. Evolutionary programming: An introduction and some current directions. Stat. Comput. 1994, 4, 113–129. [Google Scholar] [CrossRef]
- Jacob, C. Evolutionary Programming. In Illustrating Evolutionary Computation with Mathematica; Elsevier: Amsterdam, The Netherlands, 2001; pp. 297–344. [Google Scholar] [CrossRef]
- Dagdia, Z.C.; Mirchev, M. When Evolutionary Computing Meets Astro- and Geoinformatics. In Knowledge Discovery in Big Data from Astronomy and Earth Observation; Elsevier: Amsterdam, The Netherlands, 2020; pp. 283–306. [Google Scholar] [CrossRef]
- Hoorfar, A. Evolutionary Programming in Electromagnetic Optimization: A Review. IEEE Trans. Antennas Propag. 2007, 55, 523–537. [Google Scholar] [CrossRef]
- Bäck, T.; Rudolph, G.; Schwefel, H.-P. Evolutionary Programming and Evolution Strategies: Similarities and Differences. In Proceedings of the Second Annual Conference on Evolutionary Programming, La Jolla, CA, USA, 25–26 February 1993; pp. 11–22. [Google Scholar]
- Rechenberg, I. Evolution Strategy: Optimization of Technical systems by means of biological evolution. Fromman-Holzboog. Stuttgart 1973, 104, 15. [Google Scholar]
- Ferreira, C. Gene Expression Programming: A New Adaptive Algorithm for Solving Problems. arXiv 2001, arXiv:cs/0102027v3. [Google Scholar]
- Moscato, P. On Evolution, Search, Optimization, Genetic Algorithms and Martial Arts: Towards Memetic Algorithms; Caltech concurrent computation program, C3P Report; California Institute of Technology: Pasadena, CA, USA, 1989. [Google Scholar]
- Ryan, C.; Collins, J.; Neill, M.O. Grammatical evolution: Evolving programs for an arbitrary language. In Proceedings of the Genetic Programming: First European Workshop, EuroGP’98, Paris, France, 14–15 April 1998; pp. 83–96. [Google Scholar] [CrossRef]
- Farmer, J.D.; Packard, N.H.; Perelson, A.S. The immune system, adaptation, and machine learning. Phys. D Nonlinear Phenom. 1986, 22, 187–204. [Google Scholar] [CrossRef]
- Dasgupta, D. Artificial Immune Systems and Their Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999. [Google Scholar] [CrossRef]
- Beluch, W.; Burczyński, T.; Kuś, W. Parallel Artificial Immune System in Optimization and Identification of Composite Structures. In Parallel Problem Solving from Nature, PPSN XI; Springer: Berlin/Heidelberg, Germany, 2010; pp. 171–180. [Google Scholar] [CrossRef]
- De Castro, L.N.; von Zuben, F.J. The Clonal Selection Algorithm with Engineering Applications. In Proceedings of the GECCO, Cancún, Mexico, 8–12 July 2020; pp. 36–37. [Google Scholar]
- de Castro, L.N.; Timmis, J. An artificial immune network for multimodal function optimization. In Proceedings of the 2002 Congress on Evolutionary Computation. CEC’02 (Cat. No.02TH8600), Honolulu, HI, USA, 12–17 May 2002; pp. 699–704. [Google Scholar] [CrossRef] [Green Version]
- Jaddi, N.S.; Alvankarian, J.; Abdullah, S. Kidney-inspired algorithm for optimization problems. Commun. Nonlinear Sci. Numer. Simul. 2017, 42, 358–369. [Google Scholar] [CrossRef]
- Hatamlou, A. Heart: A novel optimization algorithm for cluster analysis. Prog. Artif. Intell. 2014, 2, 167–173. [Google Scholar] [CrossRef]
- Kaveh, A.; Kooshkebaghi, M. Artificial Coronary Circulation System; A new bio-inspired metaheuristic algorithm. Sci. Iran. 2019, 26, 2731–2747. [Google Scholar] [CrossRef] [Green Version]
- Asil Gharebaghi, S.; Ardalan Asl, M. New Meta-Heuristic Optimization Algorithm Using Neuronal Communication. Int. J. Optim. Civ. Eng. 2017, 7, 413–431. [Google Scholar]
- Raouf, O.A.; Hezam, I.M. Sperm motility algorithm: A novel metaheuristic approach for global optimisation. Int. J. Oper. Res. 2017, 28, 143. [Google Scholar] [CrossRef]
- Enciso, V.O.; Cuevas, E.; Oliva, D.; Sossa, H.; Cisneros, M.P. A bio-inspired evolutionary algorithm: Allostatic optimisation. Int. J. Bio-Inspired Comput. 2016, 8, 154. [Google Scholar] [CrossRef]
- Simon, D. Biogeography-Based Optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Cheng, M.-Y.; Prayogo, D. Symbiotic Organisms Search: A new metaheuristic optimization algorithm. Comput. Struct. 2014, 139, 98–112. [Google Scholar] [CrossRef]
- He, S.; Wu, Q.H.; Saunders, J.R. Group Search Optimizer: An Optimization Algorithm Inspired by Animal Searching Behavior. IEEE Trans. Evol. Comput. 2009, 13, 973–990. [Google Scholar] [CrossRef]
- Civicioglu, P. Transforming geocentric cartesian coordinates to geodetic coordinates by using differential search algorithm. Comput. Geosci. 2012, 46, 229–247. [Google Scholar] [CrossRef]
- Li, X.; Zhang, J.; Yin, M. Animal migration optimization: An optimization algorithm inspired by animal migration behavior. Neural Comput. Appl. 2014, 24, 1867–1877. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, R.; Yang, J.; Lewis, A.; Chiclana, F.; Yang, S. Biology migration algorithm: A new nature-inspired heuristic methodology for global optimization. Soft Comput. 2019, 23, 7333–7358. [Google Scholar] [CrossRef]
- Oftadeh, R.; Mahjoob, M.J.; Shariatpanahi, M. A novel meta-heuristic optimization algorithm inspired by group hunting of animals: Hunting search. Comput. Math. Appl. 2010, 60, 2087–2098. [Google Scholar] [CrossRef] [Green Version]
- Fausto, F.; Cuevas, E.; Valdivia, A.; González, A. A global optimization algorithm inspired in the behavior of selfish herds. Biosystems 2017, 160, 39–55. [Google Scholar] [CrossRef] [PubMed]
- Tilahun, S.L.; Ong, H.C. Prey-Predator Algorithm: A New Metaheuristic Algorithm for Optimization Problems. Int. J. Inf. Technol. Decis. Mak. 2015, 14, 1331–1352. [Google Scholar] [CrossRef]
- Dai, C.; Zhu, Y.; Chen, W. Seeker Optimization Algorithm. In Proceedings of the Computational Intelligence and Security: International Conference, CIS 2006, Guangzhou, China, 3–6 November 2006; pp. 167–176. [Google Scholar] [CrossRef]
- Cuevas, E.; González, M.; Zaldivar, D.; Pérez-Cisneros, M.; García, G. An Algorithm for Global Optimization Inspired by Collective Animal Behavior. Discret. Dyn. Nat. Soc. 2012, 2012, 638275. [Google Scholar] [CrossRef] [Green Version]
- Farasat, A.; Menhaj, M.B.; Mansouri, T.; Moghadam, M.R.S. ARO: A new model-free optimization algorithm inspired from asexual reproduction. Appl. Soft Comput. 2010, 10, 1284–1292. [Google Scholar] [CrossRef]
- Kaveh, A.; Zolghadr, A. Cyclical Parthenogenesis Algorithm: A new meta-heuristic algorithm. Asian J. Civ. Eng. 2017, 18, 673–701. [Google Scholar]
- Chen, H.; Zhu, Y.; Hu, K.; He, X. Hierarchical Swarm Model: A New Approach to Optimization. Discret. Dyn. Nat. Soc. 2010, 2010, 379649. [Google Scholar] [CrossRef] [Green Version]
- Parpinelli, R.S.; Lopes, H.S. An eco-inspired evolutionary algorithm applied to numerical optimization. In Proceedings of the 2011 Third World Congress on Nature and Biologically Inspired Computing, Salamanca, Spain, 19–21 October 2011; pp. 466–471. [Google Scholar] [CrossRef]
- Mohseni, S.; Gholami, R.; Zarei, N.; Zadeh, A.R. Competition over Resources: A New Optimization Algorithm Based on Animals Behavioral Ecology. In Proceedings of the 2014 International Conference on Intelligent Networking and Collaborative Systems, Salerno, Italy, 10–12 September 2014; pp. 311–315. [Google Scholar] [CrossRef]
- Nguyen, H.T.; Bhanu, B. Zombie Survival Optimization: A swarm intelligence algorithm inspired by zombie foraging. In Proceedings of the 21st International Conference on Pattern Recognition (ICPR2012), Tsukuba, Japan, 11–15 November 2012; pp. 987–990. [Google Scholar]
- Pattnaik, S.S.; Bakwad, K.M.; Sohi, B.S.; Ratho, R.K.; Devi, S. Swine Influenza Models Based Optimization (SIMBO). Appl. Soft Comput. 2013, 13, 628–653. [Google Scholar] [CrossRef]
- Huang, G. Artificial infectious disease optimization: A SEIQR epidemic dynamic model-based function optimization algorithm. Swarm Evol. Comput. 2016, 27, 31–67. [Google Scholar] [CrossRef] [PubMed]
- Tang, D.; Dong, S.; Jiang, Y.; Li, H.; Huang, Y. ITGO: Invasive tumor growth optimization algorithm. Appl. Soft Comput. 2015, 36, 670–698. [Google Scholar] [CrossRef]
- Salmani, M.H.; Eshghi, K. A Metaheuristic Algorithm Based on Chemotherapy Science: CSA. J. Optim. 2017, 2017, 3082024. [Google Scholar] [CrossRef]
- Muller, S.D.; Marchetto, J.; Airaghi, S.; Kournoutsakos, P. Optimization based on bacterial chemotaxis. IEEE Trans. Evol. Comput. 2002, 6, 16–29. [Google Scholar] [CrossRef]
- Passino, K.M. Bacterial Foraging Optimization. In Innovations and Developments of Swarm Intelligence Applications; IGI Global: Hershey, PA, USA, 2012; pp. 219–234. [Google Scholar] [CrossRef]
- Niu, B.; Wang, H. Bacterial colony optimization. Discret. Dyn. Nat. Soc. 2012, 2012, 698057. [Google Scholar] [CrossRef] [Green Version]
- Tang, W.J.; Wu, Q.H.; Saunders, J.R. A bacterial swarming algorithm for global optimization. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 1207–1212. [Google Scholar] [CrossRef]
- Nawa, N.E.; Furuhashi, T. Bacterial evolutionary algorithm for fuzzy system design. In Proceedings of the SMC’98 Conference Proceedings 1998 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No.98CH36218), San Diego, CA, USA, 14 October 1998; pp. 2424–2429. [Google Scholar] [CrossRef] [Green Version]
- Mo, H.; Xu, L. Magnetotactic bacteria optimization algorithm for multimodal optimization. In Proceedings of the 2013 IEEE Symposium on Swarm Intelligence (SIS), Singapore, 16–19 April 2013; pp. 240–247. [Google Scholar] [CrossRef]
- Chandramouli Anandaraman; Arun Vikram Madurai Sankar; Ramaraj Natarajan A New Evolutionary Algorithm Based on Bacterial Evolution and Its Application for Scheduling A Flexible Manufacturing System. J. Tek. Ind. 2012, 14, 1–12.
- Li, M.D.; Zhao, H.; Weng, X.W.; Han, T. A novel nature-inspired algorithm for optimization: Virus colony search. Adv. Eng. Softw. 2016, 92, 65–88. [Google Scholar] [CrossRef]
- Cortés, P.; García, J.M.; Muñuzuri, J.; Onieva, L. Viral systems: A new bio-inspired optimisation approach. Comput. Oper. Res. 2008, 35, 2840–2860. [Google Scholar] [CrossRef]
- Jaderyan, M.; Khotanlou, H. Virulence Optimization Algorithm. Appl. Soft Comput. 2016, 43, 596–618. [Google Scholar] [CrossRef]
- Kelsey, J.; Timmis, J. Immune Inspired Somatic Contiguous Hypermutation for Function Optimisation. In Genetic and Evolutionary Computation Conference—GECCO 2003: Genetic and Evolutionary Computation—GECCO 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 207–218. [Google Scholar] [CrossRef]
- Taherdangkoo, M.; Yazdi, M.; Bagheri, M.H. Stem Cells Optimization Algorithm. In International Conference on Intelligent Computing—ICIC 2011: Bio-Inspired Computing and Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 394–403. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, S.; Hu, Y.; Zhang, Y.; Mahadevan, S.; Deng, Y. Solving 0-1 knapsack problems based on amoeboid organism algorithm. Appl. Math. Comput. 2013, 219, 9959–9970. [Google Scholar] [CrossRef]
- Krishnaveni, M.; Subashini, P.; Dhivyaprabha, T.T. A new optimization approach—SFO for denoising digital images. In Proceedings of the 2016 International Conference on Computation System and Information Technology for Sustainable Solutions (CSITSS), Bengaluru, India, 6–8 October 2016; pp. 34–39. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Dorigo, M.; Stützle, T. Ant Colony Optimization: Overview and Recent Advances. In Handbook of Metaheuristics; Springer: Berlin/Heidelberg, Germany, 2019; pp. 311–351. [Google Scholar] [CrossRef] [Green Version]
- Karaboga, D. An Idea based on Honey Bee Swarm for Numerical Optimization; Technical report-tr06; Computer Engineering Department, Engineering Faculty, Erciyes University: Kayseri, Turkey, 2005; Volume 200, pp. 1–10. Available online: http://mf.erciyes.edu.tr/abc/pub/tr06_2005.pdf (accessed on 20 June 2023).
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. On the performance of artificial bee colony (ABC) algorithm. Appl. Soft Comput. J. 2008, 8, 687–697. [Google Scholar] [CrossRef]
- Dervis Karaboga; Bahriye Akay A comparative study of Artificial Bee Colony algorithm. Appl. Math. Comput. 2009, 214, 108–132.
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Teodorović, D. Bee Colony Optimization (BCO). In Innovations in Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2009; pp. 39–60. [Google Scholar] [CrossRef]
- Haddad, O.B.; Afshar, A.; Mariño, M.A. Honey-Bees Mating Optimization (HBMO) Algorithm: A New Heuristic Approach for Water Resources Optimization. Water Resour. Manag. 2006, 20, 661–680. [Google Scholar] [CrossRef]
- Abbass, H.A. MBO: Marriage in honey bees optimization a haplometrosis polygynous swarming approach. In Proceedings of the 2001 Congress on Evolutionary Computation (IEEE Cat. No.01TH8546), Seoul, Republic of Korea, 27–30 May 2001; pp. 207–214. [Google Scholar] [CrossRef]
- Jung, S.H. Queen-bee evolution for genetic algorithms. Electron. Lett. 2003, 39, 575. [Google Scholar] [CrossRef]
- Akbari, R.; Mohammadi, A.; Ziarati, K. A novel bee swarm optimization algorithm for numerical function optimization. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3142–3155. [Google Scholar] [CrossRef]
- Lu, X.; Zhou, Y. A Novel Global Convergence Algorithm: Bee Collecting Pollen Algorithm. In Advanced Intelligent Computing Theories and Applications. With Aspects of Artificial Intelligence: Proceedings of the 4th International Conference on Intelligent Computing, ICIC 2008, Shanghai, China, 15–18 September 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 518–525. [Google Scholar] [CrossRef]
- Maia, R.D.; de Castro, L.N.; Caminhas, W.M. Bee colonies as model for multimodal continuous optimization: The OptBees algorithm. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Abdullah, J.M.; Ahmed, T. Fitness Dependent Optimizer: Inspired by the Bee Swarming Reproductive Process. IEEE Access 2019, 7, 43473–43486. [Google Scholar] [CrossRef]
- Comellas, F.; Martinez-Navarro, J. Bumblebees. In Proceedings of the first ACM/SIGEVO Summit on Genetic and Evolutionary Computation—GEC ’09, Shanghai, China, 12–14 June 2009; ACM Press: New York, NY, USA, 2009; p. 811. [Google Scholar] [CrossRef]
- Marinakis, Y.; Marinaki, M.; Matsatsinis, N. A Bumble Bees Mating Optimization Algorithm for Global Unconstrained Optimization Problems. NICSO 2010, 284, 305–318. [Google Scholar] [CrossRef]
- Mirjalili, S. The Ant Lion Optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Mirjalili, S. Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural Comput. Appl. 2016, 27, 1053–1073. [Google Scholar] [CrossRef]
- Pan, W.-T. A new Fruit Fly Optimization Algorithm: Taking the financial distress model as an example. Knowl-Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Al-Rifaie, M.M. Dispersive Flies Optimisation. In Proceedings of the 2014 Federated Conference on Computer Science and Information Systems, Warsaw, Poland, 7–10 September 2014; pp. 529–538. [Google Scholar] [CrossRef] [Green Version]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper Optimisation Algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef] [Green Version]
- Chen, S. Locust Swarms—A new multi-optima search technique. In Proceedings of the 2009 IEEE Congress on Evolutionary Computation, Trondheim, Norway, 18–21 May 2009; pp. 1745–1752. [Google Scholar] [CrossRef]
- Canayaz, M.; Karci, A. Cricket behaviour-based evolutionary computation technique in solving engineering optimization problems. Appl. Intell. 2016, 44, 362–376. [Google Scholar] [CrossRef]
- Yang, X.S.; He, X. Firefly algorithm: Recent advances and applications. Int. J. Swarm Intell. 2013, 1, 36. [Google Scholar] [CrossRef] [Green Version]
- Krishnanand, K.N.; Ghose, D. Glowworm swarm optimisation: A new method for optimising multi-modal functions. Int. J. Comput. Intell. Stud. 2009, 1, 93. [Google Scholar] [CrossRef]
- Bidar, M.; Rashidy Kanan, H. Jumper firefly algorithm. In Proceedings of the ICCKE 2013, Mashhad, Iran, 31 October–1 November 2013; pp. 267–271. [Google Scholar] [CrossRef]
- Cuevas, E.; Cienfuegos, M.; Zaldívar, D.; Pérez-Cisneros, M. A swarm optimization algorithm inspired in the behavior of the social-spider. Expert Syst. Appl. 2013, 40, 6374–6384. [Google Scholar] [CrossRef] [Green Version]
- Hayyolalam, V.; Pourhaji Kazem, A.A. Black Widow Optimization Algorithm: A novel meta-heuristic approach for solving engineering optimization problems. Eng. Appl. Artif. Intell. 2020, 87, 103249. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras Eslamlou, A. Water strider algorithm: A new metaheuristic and applications. Structures 2020, 25, 520–541. [Google Scholar] [CrossRef]
- Wang, G.-G.; Deb, S.; Cui, Z. Monarch butterfly optimization. Neural Comput. Appl. 2019, 31, 1995–2014. [Google Scholar] [CrossRef] [Green Version]
- Arora, S.; Singh, S. Butterfly algorithm with Lèvy Flights for global optimization. In Proceedings of the 2015 International Conference on Signal Processing, Computing and Control (ISPCC), Waknaghat, India, 24–26 September 2015; pp. 220–224. [Google Scholar] [CrossRef]
- Qi, X.; Zhu, Y.; Zhang, H. A new meta-heuristic butterfly-inspired algorithm. J. Comput. Sci. 2017, 23, 226–239. [Google Scholar] [CrossRef]
- Havens, T.C.; Spain, C.J.; Salmon, N.G.; Keller, J.M. Roach Infestation Optimization. In Proceedings of the 2008 IEEE Swarm Intelligence Symposium, St. Louis, MO, USA, 21–23 September 2008; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Tang, H. Notice of Retraction: Cockroach Swarm Optimization. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology, Chengdu, China, 16–18 April 2010; pp. V6-652–V6-655. [Google Scholar] [CrossRef]
- Bouarara, H.A.; Hamou, R.M.; Amine, A. Novel Bio-Inspired Technique of Artificial Social Cockroaches (ASC). Int. J. Organ. Collect. Intell. 2015, 5, 47–79. [Google Scholar] [CrossRef]
- Cheng, L.; Han, L.; Zeng, X.; Bian, Y.; Yan, H. Adaptive Cockroach Colony Optimization for Rod-Like Robot Navigation. J. Bionic Eng. 2015, 12, 324–337. [Google Scholar] [CrossRef]
- Wu, S.-J.; Wu, C.-T. A bio-inspired optimization for inferring interactive networks: Cockroach swarm evolution. Expert Syst. Appl. 2015, 42, 3253–3267. [Google Scholar] [CrossRef]
- Kallioras, N.A.; Lagaros, N.D.; Avtzis, D.N. Pity beetle algorithm—A new metaheuristic inspired by the behavior of bark beetles. Adv. Eng. Softw. 2018, 121, 147–166. [Google Scholar] [CrossRef]
- Wang, T.; Yang, L. Beetle Swarm Optimization Algorithm:Theory and Application. arXiv 2018. [Google Scholar] [CrossRef]
- Jiang, X.; Li, S. BAS: Beetle Antennae Search Algorithm for Optimization Problems. arXiv 2017. [Google Scholar] [CrossRef]
- Alauddin, M. Mosquito flying optimization (MFO). In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 79–84. [Google Scholar] [CrossRef]
- Minhas, F.U.A.A.; Arif, M. MOX: A novel global optimization algorithm inspired from Oviposition site selection and egg hatching inhibition in mosquitoes. Appl. Soft Comput. 2011, 11, 4614–4625. [Google Scholar] [CrossRef]
- Hedayatzadeh, R.; Akhavan Salmassi, F.; Keshtgari, M.; Akbari, R.; Ziarati, K. Termite colony optimization: A novel approach for optimizing continuous problems. In Proceedings of the 2010 18th Iranian Conference on Electrical Engineering, Isfahan, Iran, 11–13 May 2010; pp. 553–558. [Google Scholar] [CrossRef]
- Wang, P.; Zhu, Z.; Huang, S. Seven-Spot Ladybird Optimization: A Novel and Efficient Metaheuristic Algorithm for Numerical Optimization. Sci. World J. 2013, 2013, 378515. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi, F.; Salehi, H.; Karimi, K. Eurygaster Algorithm: A New Approach to Optimization. Int. J. Comput. Appl. 2012, 57, 8887. [Google Scholar]
- Yang, X.-S.; Deb, S. Cuckoo Search via Lévy flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar] [CrossRef]
- Ladhari, T.; Khoja, I.; Msahli, F.; Sakly, A. Parameter identification of a reduced nonlinear model for an activated sludge process based on cuckoo search algorithm. Trans. Inst. Meas. Control 2019, 41, 3352–3363. [Google Scholar] [CrossRef]
- Sur, C.; Shukla, A. New Bio-inspired Meta-Heuristics—Green Herons Optimization Algorithm—For Optimization of Travelling Salesman Problem and Road Network. In Swarm, Evolutionary, and Memetic Computing: Proceedings of the 4th International Conference, SEMCCO 2013, Chennai, India, 19–21 December 2013; Springer International Publishing: Berlin/Heidelberg, Germany, 2013; pp. 168–179. [Google Scholar] [CrossRef]
- Yang, X.; Hossein Gandomi, A. Bat algorithm: A novel approach for global engineering optimization. Eng. Comput. 2012, 29, 464–483. [Google Scholar] [CrossRef] [Green Version]
- Song, S. Auditory Device Design Inspired by Nature; Brunel University: London, UK, 2014. [Google Scholar]
- Askarzadeh, A. A novel metaheuristic method for solving constrained engineering optimization problems: Crow search algorithm. Comput. Struct. 2016, 169, 1–12. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Futur. Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Eagle strategy using Lévy walk and firefly algorithms for stochastic optimization. Stud. Comput. Intell. 2010, 284, 101–111. [Google Scholar] [CrossRef] [Green Version]
- De Vasconcelos Segundo, E.H.; Mariani, V.C.; Coelho, L. dos S. Design of heat exchangers using Falcon Optimization Algorithm. Appl. Therm. Eng. 2019, 156, 119–144. [Google Scholar] [CrossRef]
- Khan, A.T.; Li, S.; Stanimirovic, P.S.; Zhang, Y. Model-free optimization using eagle perching optimizer. arXiv 2018, arXiv:1807.02754. [Google Scholar]
- Alsattar, H.A.; Zaidan, A.A.; Zaidan, B.B. Novel meta-heuristic bald eagle search optimisation algorithm. Artif. Intell. Rev. 2020, 53, 2237–2264. [Google Scholar] [CrossRef]
- Gheraibia, Y.; Moussaoui, A. Penguins Search Optimization Algorithm (PeSOA). In Recent Trends in Applied Artificial Intelligence: Proceedings of the 26th International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, IEA/AIE 2013, Amsterdam, The Netherlands, 17–21 June 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 222–231. [Google Scholar] [CrossRef]
- Harifi, S.; Khalilian, M.; Mohammadzadeh, J.; Ebrahimnejad, S. Emperor Penguins Colony: A new metaheuristic algorithm for optimization. Evol. Intell. 2019, 12, 211–226. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Emperor penguin optimizer: A bio-inspired algorithm for engineering problems. Knowl-Based Syst. 2018, 159, 20–50. [Google Scholar] [CrossRef]
- Meng, X.; Liu, Y.; Gao, X.; Zhang, H. A New Bio-inspired Algorithm: Chicken Swarm Optimization. In Advances in Swarm Intelligence: Proceedings of the 5th International Conference, ICSI 2014, Hefei, China, 17–20 October 2014, Part I; Springer: Berlin/Heidelberg, Germany, 2014; pp. 86–94. [Google Scholar] [CrossRef]
- Meng, X.-B.; Gao, X.Z.; Lu, L.; Liu, Y.; Zhang, H. A new bio-inspired optimisation algorithm: Bird Swarm Algorithm. J. Exp. Theor. Artif. Intell. 2016, 28, 673–687. [Google Scholar] [CrossRef]
- Duman, E.; Uysal, M.; Alkaya, A.F. Migrating Birds Optimization: A new metaheuristic approach and its performance on quadratic assignment problem. Inf. Sci. 2012, 217, 65–77. [Google Scholar] [CrossRef]
- Neshat, M.; Sepidnam, G.; Sargolzaei, M. Swallow swarm optimization algorithm: A new method to optimization. Neural Comput. Appl. 2013, 23, 429–454. [Google Scholar] [CrossRef]
- Askarzadeh, A. Bird mating optimizer: An optimization algorithm inspired by bird mating strategies. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 1213–1228. [Google Scholar] [CrossRef]
- Hosseini, E. Laying Chicken Algorithm: A New Meta-Heuristic Approach to Solve Continuous Programming Problems. J. Appl. Comput. Math. 2017, 6, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Lamy, J.B. Artificial feeding birds (afb): A new metaheuristic inspired by the behavior of pigeons. In Advances in Nature-Inspired Computing and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 43–60. [Google Scholar] [CrossRef] [Green Version]
- Duan, H.; Qiao, P. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning. Int. J. Intell. Comput. Cybern. 2014, 7, 24–37. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl-Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]
- Samareh Moosavi, S.H.; Khatibi Bardsiri, V. Satin bowerbird optimizer: A new optimization algorithm to optimize ANFIS for software development effort estimation. Eng. Appl. Artif. Intell. 2017, 60, 1–15. [Google Scholar] [CrossRef]
- Jain, M.; Maurya, S.; Rani, A.; Singh, V. Owl search algorithm: A novel nature-inspired heuristic paradigm for global optimization. J. Intell. Fuzzy Syst. 2018, 34, 1573–1582. [Google Scholar] [CrossRef]
- Sur, C.; Sharma, S.; Shukla, A. Egyptian vulture optimization algorithm—A new nature inspired meta-heuristics for knapsack problem. Adv. Intell. Syst. Comput. 2013, 209 AISC, 227–237. [Google Scholar] [CrossRef]
- Hajiaghaei-Keshteli, M.; Aminnayeri, M. Keshtel Algorithm (KA); A New Optimization Algorithm Inspired by Keshtels’ Feeding. Proceeding IEEE Conf. Ind. Eng. Manag. Syst. 2012, 1, 2249–2253. [Google Scholar]
- Dhiman, G.; Kaur, A. STOA: A bio-inspired based optimization algorithm for industrial engineering problems. Eng. Appl. Artif. Intell. 2019, 82, 148–174. [Google Scholar] [CrossRef]
- Brabazon, A.; Cui, W.; O’Neill, M. The raven roosting optimisation algorithm. Soft Comput. 2016, 20, 525–545. [Google Scholar] [CrossRef]
- Almonacid, B.; Soto, R. Andean Condor Algorithm for cell formation problems. Nat. Comput. 2019, 18, 351–381. [Google Scholar] [CrossRef]
- Omidvar, R.; Parvin, H.; Rad, F. SSPCO optimization algorithm (See-See Partridge Chicks Optimization). In Proceedings of the 2015 Fourteenth Mexican International Conference on Artificial Intelligence (MICAI), Cuernavaca, Mexico, 25–31 October 2015; pp. 101–106. [Google Scholar] [CrossRef]
- El-Dosuky, M.; EL-Bassiouny, A.; Hamza, T.; Rashad, M. New Hoopoe Heuristic Optimization. arXiv 2012, arXiv:1211.6410. [Google Scholar]
- Blanco, A.L.; Chaparro, N.; Rojas-Galeano, S. An urban pigeon-inspired optimiser for unconstrained continuous domains. In Proceedings of the 2019 8th Brazilian Conference on Intelligent Systems (BRACIS), Salvador, Brazil, 15–18 October 2019; pp. 521–526. [Google Scholar] [CrossRef]
- Tawfeeq, M.A. Intelligent Algorithm for Optimum Solutions Based on the Principles of Bat Sonar. arXiv 2012, arXiv:1211.0730. [Google Scholar]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Hofman, J. Bubble-Net Feeding, Instagram. 2021. Available online: https://www.instagram.com/p/B4H160do6u (accessed on 26 June 2021).
- Gandomi, A.H.; Alavi, A.H. Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4831–4845. [Google Scholar] [CrossRef]
- Li, L.X. An optimizing method based on autonomous animals: Fish-swarm algorithm. Syst. Eng. Theory Pract. 2002, 22, 32–38. [Google Scholar]
- Neshat, M.; Sepidnam, G.; Sargolzaei, M.; Toosi, A.N. Artificial fish swarm algorithm: A survey of the state-of-the-art, hybridization, combinatorial and indicative applications. Artif. Intell. Rev. 2014, 42, 965–997. [Google Scholar] [CrossRef]
- Li, G.; Yang, Y.; Zhao, T.; Peng, P.; Zhou, Y.; Hu, Y.; Guo, C. An improved artificial fish swarm algorithm and its application to packing and layout problems. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 9824–9828. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Xiao-lei, L.; Fei, L.; Tian, G.H.; Qian, J.X. Applications of artificial fish school algorithm in combinatorial optimization problems. J. Shandong Univ. Eng. Sci. 2005, 34, 64–67. [Google Scholar]
- Filho, C.J.A.B.; de Lima Neto, F.B.; Lins, A.J.C.C.; Nascimento, A.I.S.; Lima, M.P. Fish School Search. Nat-Inspired Algorithms Optim. 2009, 193, 261–277. [Google Scholar] [CrossRef]
- Shadravan, S.; Naji, H.R.; Bardsiri, V.K. The Sailfish Optimizer: A novel nature-inspired metaheuristic algorithm for solving constrained engineering optimization problems. Eng. Appl. Artif. Intell. 2019, 80, 20–34. [Google Scholar] [CrossRef]
- Mozaffari, A.; Fathi, A.; Behzadipour, S. The great salmon run: A novel bio-inspired algorithm for artificial system design and optimisation. Int. J. Bio-Inspired Comput. 2012, 4, 286–301. [Google Scholar] [CrossRef]
- Jahani, E.; Chizari, M. Tackling global optimization problems with a novel algorithm—Mouth Brooding Fish algorithm. Appl. Soft Comput. 2018, 62, 987–1002. [Google Scholar] [CrossRef]
- Zaldívar, D.; Morales, B.; Rodríguez, A.; Valdivia-G, A.; Cuevas, E.; Pérez-Cisneros, M. A novel bio-inspired optimization model based on Yellow Saddle Goatfish behavior. Biosystems 2018, 174, 1–21. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Z.; Wang, L. Manta ray foraging optimization: An effective bio-inspired optimizer for engineering applications. Eng. Appl. Artif. Intell. 2020, 87, 103300. [Google Scholar] [CrossRef]
- Yilmaz, S.; Sen, S. Electric fish optimization: A new heuristic algorithm inspired by electrolocation. Neural Comput. Appl. 2020, 32, 11543–11578. [Google Scholar] [CrossRef]
- Haldar, V.; Chakraborty, N. A novel evolutionary technique based on electrolocation principle of elephant nose fish and shark: Fish electrolocation optimization. Soft Comput. 2017, 21, 3827–3848. [Google Scholar] [CrossRef]
- Kaveh, A.; Farhoudi, N. A new optimization method: Dolphin echolocation. Adv. Eng. Softw. 2013, 59, 53–70. [Google Scholar] [CrossRef]
- Shiqin, Y.; Jianjun, J.; Guangxing, Y. A Dolphin Partner Optimization. In Proceedings of the 2009 WRI Global Congress on Intelligent Systems, Xiamen, China, 19–21 May 2009; pp. 124–128. [Google Scholar] [CrossRef]
- Wu, T.; Yao, M.; Yang, J. Dolphin swarm algorithm. Front. Inf. Technol. Electron. Eng. 2016, 17, 717–729. [Google Scholar] [CrossRef] [Green Version]
- Yong, W.; Tao, W.; Cheng-Zhi, Z.; Hua-Juan, H. A New Stochastic Optimization Approach—Dolphin Swarm Optimization Algorithm. Int. J. Comput. Intell. Appl. 2016, 15, 1650011. [Google Scholar] [CrossRef]
- Serani, A.; Diez, M. Dolphin Pod Optimization. In Advances in Swarm Intelligence: Proceedings of the 8th International Conference, ICSI 2017, Fukuoka, Japan, 27 July–1 August 2017, Part I; Springer: Berlin/Heidelberg, Germany, 2017; pp. 50–62. [Google Scholar] [CrossRef]
- Abedinia, O.; Amjady, N.; Ghasemi, A. A new metaheuristic algorithm based on shark smell optimization. Complexity 2016, 21, 97–116. [Google Scholar] [CrossRef]
- Ebrahimi, A.; Khamehchi, E. Sperm whale algorithm: An effective metaheuristic algorithm for production optimization problems. J. Nat. Gas Sci. Eng. 2016, 29, 211–222. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Biyanto, T.R.; Matradji; Irawan, S.; Febrianto, H.Y.; Afdanny, N.; Rahman, A.H.; Gunawan, K.S.; Pratama, J.A.D.; Bethiana, T.N. Killer Whale Algorithm: An Algorithm Inspired by the Life of Killer Whale. Procedia Comput. Sci. 2017, 124, 151–157. [Google Scholar] [CrossRef]
- Zeng, B.; Gao, L.; Li, X. Whale Swarm Algorithm for Function Optimization. In Proceedings of the Intelligent Computing Theories and Application: 13th International Conference, ICIC 2017, Liverpool, UK, 7–10 August 2017; pp. 624–639. [Google Scholar] [CrossRef] [Green Version]
- Mohammad Taisir Masadeh, R.; Abdel-Aziz Sharieh, A.; Mahafzah, B.A.; Masadeh, R.; Sharieh, A. Humpback Whale Optimization Algorithm Based on Vocal Behavior for Task Scheduling in Cloud Computing. Int. J. Adv. Sci. Technol. 2019, 13, 121–140. [Google Scholar]
- Uymaz, S.A.; Tezel, G.; Yel, E. Artificial algae algorithm (AAA) for nonlinear global optimization. Appl. Soft Comput. 2015, 31, 153–171. [Google Scholar] [CrossRef]
- Salcedo-Sanz, S.; Del Ser, J.; Landa-Torres, I.; Gil-López, S.; Portilla-Figueras, J.A. The Coral Reefs Optimization Algorithm: A Novel Metaheuristic for Efficiently Solving Optimization Problems. Sci. World J. 2014, 2014, 739768. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eesa, A.S.; Brifcani, A.M.A.; Orman, Z. Cuttlefish algorithm-a novel bio-inspired optimization algorithm. Int. J. Sci. Eng. Res. 2013, 4, 1978–1987. [Google Scholar]
- An, J.; Kang, Q.; Wang, L.; Wu, Q. Mussels Wandering Optimization: An Ecologically Inspired Algorithm for Global Optimization. Cognit. Comput. 2013, 5, 188–199. [Google Scholar] [CrossRef]
- Kaur, S.; Awasthi, L.K.; Sangal, A.L.; Dhiman, G. Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]
- Masadeh, R.; Mahafzah, B.A.; Sharieh, A. Sea Lion Optimization algorithm. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 388–395. [Google Scholar] [CrossRef] [Green Version]
- Sulaiman, M.H.; Mustaffa, Z.; Saari, M.M.; Daniyal, H.; Musirin, I.; Daud, M.R. Barnacles mating optimizer: An evolutionary algorithm for solving optimization. In Proceedings of the 2018 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Shah Alam, Malaysia, 20 October 2018; pp. 99–104. [Google Scholar] [CrossRef]
- Pook, M.F.; Ramlan, E.I. The Anglerfish algorithm: A derivation of randomized incremental construction technique for solving the traveling salesman problem. Evol. Intell. 2019, 12, 11–20. [Google Scholar] [CrossRef]
- Catalbas, M.C.; Gulten, A. Circular structures of puffer fish: A new metaheuristic optimization algorithm. In Proceedings of the 2018 Third International Conference on Electrical and Biomedical Engineering, Clean Energy and Green Computing (EBECEGC), Beirut, Lebanon, 25–27 April 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Ghojogh, B.; Sharifian, S. Pontogammarus maeoticus swarm optimization: A metaheuristic optimization algorithm. arXiv 2018, arXiv:1807.01844. [Google Scholar]
- Sukoon, M.; Banka, H. Water-Tank Fish Algorithm: A New Metaheuristic for Optimization. Int. J. Comput. Appl. 2018, 182, 1–5. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Saber, M.; El-kenawy, E.-S.M. Design and implementation of accurate frequency estimator depend on deep learning. Int. J. Eng. Technol. 2020, 9, 367–377. [Google Scholar] [CrossRef]
- Eusuff, M.; Lansey, K.; Pasha, F. Shuffled frog-leaping algorithm: A memetic meta-heuristic for discrete optimization. Eng. Optim. 2006, 38, 129–154. [Google Scholar] [CrossRef]
- Elbeltagi, E.; Hegazy, T.; Grierson, D. A modified shuffled frog-leaping optimization algorithm: Applications to project management. Struct. Infrastruct. Eng. 2007, 3, 53–60. [Google Scholar] [CrossRef]
- Li, X.; Luo, J.; Chen, M.-R.; Wang, N. An improved shuffled frog-leaping algorithm with extremal optimisation for continuous optimisation. Inf. Sci. 2012, 192, 143–151. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, X.; Cui, G.; Wang, Y.; Niu, Y. An improved shuffled frog leaping algorithm with cognitive behavior. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 6197–6202. [Google Scholar] [CrossRef]
- Chu, S.-C.; Tsai, P.; Pan, J.-S. Cat Swarm Optimization. In PRICAI 2006: Trends in Artificial Intelligence, 9th Pacific Rim International Conference on Artificial Intelligence, Guilin, China, 7–11 August 2006, Proceedings; Springer: Berlin/Heidelberg, Germany, 2006; pp. 854–858. [Google Scholar] [CrossRef]
- Bansal, J.C.; Sharma, H.; Jadon, S.S.; Clerc, M. Spider Monkey Optimization algorithm for numerical optimization. Memetic Comput. 2014, 6, 31–47. [Google Scholar] [CrossRef]
- Mucherino, A.; Seref, O.; Seref, O.; Kundakcioglu, O.E.; Pardalos, P. Monkey search: A novel metaheuristic search for global optimization. In AIP Conference Proceedings; AIP: College Park, MD, USA, 2007; Volume 953, pp. 162–173. [Google Scholar] [CrossRef]
- Meng, Z.; Pan, J.-S. Monkey King Evolution: A new memetic evolutionary algorithm and its application in vehicle fuel consumption optimization. Knowl.-Based Syst. 2016, 97, 144–157. [Google Scholar] [CrossRef]
- Mahmood, M.; Al-Khateeb, B. The blue monkey: A new nature inspired metaheuristic optimization algorithm. Period. Eng. Nat. Sci. 2019, 7, 1054. [Google Scholar] [CrossRef] [Green Version]
- Yazdani, M.; Jolai, F. Lion Optimization Algorithm (LOA): A nature-inspired metaheuristic algorithm. J. Comput. Des. Eng. 2016, 3, 24–36. [Google Scholar] [CrossRef] [Green Version]
- Rajakumar, B.R. The Lion’s Algorithm: A New Nature-Inspired Search Algorithm. Procedia Technol. 2012, 6, 126–135. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Jin, X.; Cheng, B. Lion pride optimizer: An optimization algorithm inspired by lion pride behavior. Sci. China Inf. Sci. 2012, 55, 2369–2389. [Google Scholar] [CrossRef]
- Kaveh, A.; Mahjoubi, S. Lion Pride Optimization Algorithm: A meta-heuristic method for global optimization problems. Sci. Iran. 2018, 25, 3113–3132. [Google Scholar] [CrossRef]
- Tang, R.; Fong, S.; Yang, X.S.; Deb, S. Wolf search algorithm with ephemeral memory. In Proceedings of the Seventh International Conference on Digital Information Management (ICDIM 2012), Macau, China, 22–24 August 2012; pp. 165–172. [Google Scholar] [CrossRef]
- Wu, H.S.; Zhang, F.M. Wolf pack algorithm for unconstrained global optimization. Math. Probl. Eng. 2014, 2014, 465082. [Google Scholar] [CrossRef] [Green Version]
- Alhijawi, B. Dominion algorithm- a novel metaheuristic optimization method. Int. J. Adv. Intell. Paradig. 2021, 20, 221–242. [Google Scholar]
- Chi, M. An improved Wolf pack algorithm. In Proceedings of the International Conference on Artificial Intelligence, Information Processing and Cloud Computing (AIIPCC’19), Sanya, China, 19–21 December 2019; ACM: Guildford, UK, 2019. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Spotted hyena optimizer: A novel bio-inspired based metaheuristic technique for engineering applications. Adv. Eng. Softw. 2017, 114, 48–70. [Google Scholar] [CrossRef]
- Pierezan, J.; Dos Santos Coelho, L. Coyote Optimization Algorithm: A New Metaheuristic for Global Optimization Problems. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018. [Google Scholar] [CrossRef]
- Polap, D.; Woźniak, M. Polar bear optimization algorithm: Meta-heuristic with fast population movement and dynamic birth and death mechanism. Symmetry 2017, 9, 203. [Google Scholar] [CrossRef] [Green Version]
- Klein, C.E.; Mariani, V.C.; Coelho, L.D.S. Cheetah based optimization algorithm: A novel swarm intelligence paradigm. In Proceedings of the ESANN 2018 Proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, 25–27 April 2018; pp. 685–690. [Google Scholar]
- Goudhaman, M. Cheetah chase algorithm (CCA): A nature-inspired metaheuristic algorithm. Int. J. Eng. Technol. 2018, 7, 1804. [Google Scholar] [CrossRef]
- Chen, C.C.; Tsai, Y.C.; Liu, I.I.; Lai, C.C.; Yeh, Y.T.; Kuo, S.Y.; Chou, Y.H. A Novel Metaheuristic: Jaguar Algorithm with Learning Behavior. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics, Hong Kong, China, 9–12 October 2015; pp. 1595–1600. [Google Scholar] [CrossRef]
- Subramanian, C. African Wild Dog Algorithm: A New Meta Heuristic Approach for Optimal Design of Steel Structures. Ph.D. Thesis, Anna University, Nadu, India, 2015. [Google Scholar]
- Tripathi, A.K.; Sharma, K.; Bala, M. Military dog based optimizer and its application to fake review detection. arXiv 2019, arXiv:1909.11890. [Google Scholar]
- Zhang, L.M.; Dahlmann, C.; Zhang, Y. Human-Inspired Algorithms for continuous function optimization. In Proceedings of the 2009 IEEE International Conference on Intelligent Computing and Intelligent Systems, Shanghai, China, 20–22 November 2009; pp. 318–321. [Google Scholar] [CrossRef]
- Wang, G.G.; Deb, S.; Coelho, L.D.S. Elephant Herding Optimization. In Proceedings of the 2015 3rd International Symposium on Computational and Business Intelligence (ISCBI), Bali, Indonesia, 7–9 December 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Deb, S.; Fong, S.; Tian, Z. Elephant Search Algorithm for optimization problems. In Proceedings of the 2015 Tenth International Conference on Digital Information Management (ICDIM), Jeju, Republic of Korea, 21–23 October 2015; pp. 249–255. [Google Scholar] [CrossRef]
- Jain, M.; Singh, V.; Rani, A. A novel nature-inspired algorithm for optimization: Squirrel search algorithm. Swarm Evol. Comput. 2019, 44, 148–175. [Google Scholar] [CrossRef]
- Azizyan, G.; Miarnaeimi, F.; Rashki, M.; Shabakhty, N. Flying Squirrel Optimizer (FSO): A novel SI-based optimization algorithm for engineering problems. Iran. J. Optim. 2019, 11, 177–205. [Google Scholar]
- Klein, C.E.; Coelho, L.D.S. Meerkats-inspired algorithm for global optimization problems. In Proceedings of the ESANN 2018 Proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning, Bruges, Belgium, 25–27 April 2018; pp. 679–684. [Google Scholar]
- Al-Obaidi, A.T.S.; Abdullah, H.S.; Ahmed, Z.O. Meerkat clan algorithm: A new swarm intelligence algorithm. Indones. J. Electr. Eng. Comput. Sci. 2018, 10, 354–360. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, B. A new evolutionary algorithm based on sheep flocks heredity model. In Proceedings of the 2001 IEEE Pacific Rim Conference on Communications, Computers and Signal Processing (IEEE Cat. No.01CH37233), Victoria, BC, Canada, 26–28 August 2001; pp. 514–517. [Google Scholar] [CrossRef]
- Kaveh, A.; Zaerreza, A. Shuffled shepherd optimization method: A new Meta-heuristic algorithm. Eng. Comput. 2020, 37, 2357–2389. [Google Scholar] [CrossRef]
- Khalid Ibrahim, M.; Salim Ali, R. Novel Optimization Algorithm Inspired by Camel Traveling Behavior. Iraqi J. Electr. Electron. Eng. 2016, 12, 167–177. [Google Scholar] [CrossRef]
- Motevali, M.M.; Shanghooshabad, A.M.; Aram, R.Z.; Keshavarz, H. WHO: A New Evolutionary Algorithm Bio-Inspired by Wildebeests with a Case Study on Bank Customer Segmentation. Int. J. Pattern Recognit. Artif. Intell. 2019, 33, 1959017. [Google Scholar] [CrossRef]
- Maciel, C.O.; Cuevas, E.; Navarro, M.A.; Zaldívar, D.; Hinojosa, S. Side-Blotched Lizard Algorithm: A polymorphic population approach. Appl. Soft Comput. J. 2020, 88, 106039. [Google Scholar] [CrossRef]
- Zangbari Koohi, S.; Abdul Hamid, N.A.W.; Othman, M.; Ibragimov, G. Raccoon Optimization Algorithm. IEEE Access 2019, 7, 5383–5399. [Google Scholar] [CrossRef]
- Tian, Z.; Fong, S.; Tang, R.; Deb, S.; Wong, R. Rhinoceros Search Algorithm. In Proceedings of the 2016 3rd International Conference on Soft Computing & Machine Intelligence (ISCMI), Dubai, United Arab Emirates, 23–25 November 2016; pp. 18–22. [Google Scholar] [CrossRef]
- Yousefi, F.S.; Karimian, N.; Ghodousian, A. Xerus Optimization Algorithm (XOA): A novel nature-inspired metaheuristic algorithm for solving global optimization problems. J. Algorithms Comput. 2019, 51, 111–126. [Google Scholar]
- Wang, G.G.; Deb, S.; Dos Santos Coelho, L. Earthworm optimisation algorithm: A bio-inspired metaheuristic algorithm for global optimisation problems. Int. J. Bio-Inspired Comput. 2018, 12, 1–22. [Google Scholar] [CrossRef]
- Fathollahi Fard, A.M.; Hajiaghaei-Keshteli, M.; Tavakkoli-Moghaddam, R. Red Deer Algorithm (RDA); A New Optimization Algorithm Inspired by Red Deers’ Mating. In Proceedings of the 12th International Conference on Industerial Engineering (ICIE 2016), Tehran, Iran, 25–26 January 2016; pp. 1–10. [Google Scholar]
- Mohammad, T.M.H.; Mohammad, H.B. A novel meta-heuristic algorithm for numerical function optimization: Blind, naked mole-rats (BNMR) algorithm. Sci. Res. Essays 2012, 7, 3566–3583. [Google Scholar] [CrossRef]
- Wang, G.-G.; Gao, X.-Z.; Zenger, K.; dos Coelho, L.S. A Novel Metaheuristic Algorithm inspired by Rhino Herd Behavior. In Proceedings of the 9th EUROSIM Congress on Modelling and Simulation, EUROSIM 2016, the 57th SIMS Conference on Simulation and Modelling SIMS 2016; Linköping University Electronic Press: Jönköping, Sweden, 2018; Volume 142, pp. 1026–1033. [Google Scholar] [CrossRef] [Green Version]
- Shamsaldin, A.S.; Rashid, T.A.; Al-Rashid Agha, R.A.; Al-Salihi, N.K.; Mohammadi, M. Donkey and smuggler optimization algorithm: A collaborative working approach to path finding. J. Comput. Des. Eng. 2019, 6, 562–583. [Google Scholar] [CrossRef]
- Odili, J.B.; Kahar, M.N.M.; Anwar, S. African Buffalo Optimization: A Swarm-Intelligence Technique. Procedia Comput. Sci. 2015, 76, 443–448. [Google Scholar] [CrossRef] [Green Version]
- Garcia, F.; Perez, J. Jumping frogs optimization: A new swarm method for discrete optimization. Doc. Trab. DEIOC 2008, 3, 10. [Google Scholar]
- Yang, X.-S. Flower Pollination Algorithm for Global Optimization. In Unconventional Computation and Natural Computation: Proceedings of the 11th International Conference, UCNC 2012, Orléan, France, 3–7 September 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 240–249. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Basset, M.; Shawky, L.A. Flower pollination algorithm: A comprehensive review. Artif. Intell. Rev. 2019, 52, 2533–2557. [Google Scholar] [CrossRef]
- Mehrabian, A.R.; Lucas, C. A novel numerical optimization algorithm inspired from weed colonization. Ecol. Inform. 2006, 1, 355–366. [Google Scholar] [CrossRef]
- Hume, G. Dandelion (Taraxacum Officinale); Wikipedia. 2006. Available online: https://en.wikipedia.org/wiki/Taraxacum#/media/File:DandelionFlower.jpg (accessed on 20 June 2023).
- Epukas Burdock—Arctium tomentosum. Wikipedia. 2008. Available online: https://en.wikipedia.org/wiki/Arctium#/media/File:Villtakjas_2008.jpg (accessed on 20 June 2023).
- Stüber, K. Species: Amaranthus Tricolor Family: Amaranthaceae. Wikipedia. 2004. Available online: https://en.wikipedia.org/wiki/Amaranth#/media/File:Amaranthus_tricolor0.jpg (accessed on 20 June 2023).
- Kiran, M.S. TSA: Tree-seed algorithm for continuous optimization. Expert Syst. Appl. 2015, 42, 6686–6698. [Google Scholar] [CrossRef]
- Ghaemi, M.; Feizi-Derakhshi, M.-R. Forest Optimization Algorithm. Expert Syst. Appl. 2014, 41, 6676–6687. [Google Scholar] [CrossRef]
- Cheraghalipour, A.; Hajiaghaei-Keshteli, M.; Paydar, M.M. Tree Growth Algorithm (TGA): A novel approach for solving optimization problems. Eng. Appl. Artif. Intell. 2018, 72, 393–414. [Google Scholar] [CrossRef]
- Li, Q.Q.; Song, K.; He, Z.C.; Li, E.; Cheng, A.G.; Chen, T. The artificial tree (AT) algorithm. Eng. Appl. Artif. Intell. 2017, 65, 99–110. [Google Scholar] [CrossRef] [Green Version]
- Moez, H.; Kaveh, A.; Taghizadieh, N. Natural Forest Regeneration Algorithm: A New Meta-Heuristic. Iran. J. Sci. Technol. Trans. Civ. Eng. 2016, 40, 311–326. [Google Scholar] [CrossRef]
- Salhi, A.; Fraga, E.S. Nature-inspired optimisation approaches and the new plant propagation algorithm. Int. Conf. Numer. Anal. Optim. 2011, K2. [Google Scholar] [CrossRef]
- Merrikh-Bayat, F. A Numerical Optimization Algorithm Inspired by the Strawberry. arXiv 2014, arXiv:1407.7399. [Google Scholar]
- Bidar, M.; Kanan, H.R.; Mouhoub, M.; Sadaoui, S. Mushroom Reproduction Optimization (MRO): A Novel Nature-Inspired Evolutionary Algorithm. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Shayanfar, H.; Gharehchopogh, F.S. Farmland fertility: A new metaheuristic algorithm for solving continuous optimization problems. Appl. Soft Comput. 2018, 71, 728–746. [Google Scholar] [CrossRef]
- Premaratne, U.; Samarabandu, J.; Sidhu, T. A new biologically inspired optimization algorithm. In Proceedings of the 2009 International Conference on Industrial and Information Systems (ICIIS), Peradeniya, Sri Lanka, 28–31 December 2009; pp. 279–284. [Google Scholar] [CrossRef]
- Mohammadi, M.; Khodaygan, S. An algorithm for numerical nonlinear optimization: Fertile Field Algorithm (FFA). J. Ambient Intell. Humaniz. Comput. 2020, 11, 865–878. [Google Scholar] [CrossRef]
- Luqman, M.; Saeed, M.; Ali, J.; Tabassam, M.F.; Mahmood, T. Targeted showering optimization: Training irrigation tools to solve crop planning problems. Pakistan J. Agric. Sci. 2019, 56, 225–235. [Google Scholar]
- Merrikh-Bayat, F. The runner-root algorithm: A metaheuristic for solving unimodal and multimodal optimization problems inspired by runners and roots of plants in nature. Appl. Soft Comput. J. 2015, 33, 292–303. [Google Scholar] [CrossRef]
- Labbi, Y.; Ben Attous, D.; Gabbar, H.A.; Mahdad, B.; Zidan, A. A new rooted tree optimization algorithm for economic dispatch with valve-point effect. Int. J. Electr. Power Energy Syst. 2016, 79, 298–311. [Google Scholar] [CrossRef]
- Zhang, H.; Zhu, Y.; Chen, H. Root growth model: A novel approach to numerical function optimization and simulation of plant root system. Soft Comput. 2014, 18, 521–537. [Google Scholar] [CrossRef]
- Qi, X.; Zhu, Y.; Chen, H.; Zhang, D.; Niu, B. An Idea Based on Plant Root Growth for Numerical Optimization. In Intelligent Computing Theories and Technology: Proceedings of the 9th International Conference, ICIC 2013, Nanning, China, 28–31 July 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 571–578. [Google Scholar] [CrossRef] [Green Version]
- Cai, W.; Yang, W.; Chen, X. A global optimization algorithm based on plant growth theory: Plant growth optimization. In Proceedings of the 2008 International Conference on Intelligent Computation Technology and Automation (ICICTA), Changsha, China, 20–22 October 2008; pp. 1194–1199. [Google Scholar] [CrossRef]
- Liu, L.; Song, Y.; Ma, H.; Zhang, X. Physarum optimization: A biology-inspired algorithm for minimal exposure path problem in wireless sensor networks. In Proceedings of the 2012 Proceedings IEEE INFOCOM, Orlando, FL, USA, 25–30 March 2012; pp. 1296–1304. [Google Scholar] [CrossRef]
- Feng, X.; Liu, Y.; Yu, H.; Luo, F. Physarum-energy optimization algorithm. Soft Comput. 2019, 23, 871–888. [Google Scholar] [CrossRef]
- Karci, A.; Alatas, B. Thinking capability of saplings growing up algorithm. In International Conference on Intelligent Data Engineering and Automated Learning: Proceedings of the 7th International Conference, Burgos, Spain, 20–23 September 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 386–393. [Google Scholar] [CrossRef]
- Sulaiman, M.; Salhi, A. A seed-based plant propagation algorithm: The feeding station model. Sci. World J. 2015, 2015, 904364. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Cui, Z.; Zeng, J.; Yue, X. Artificial plant optimization algorithm for constrained optimization problems. In Proceedings of the 2011 Second International Conference on Innovations in Bio-inspired Computing and Applications, Shenzhen, China, 16–18 December 2011; pp. 120–123. [Google Scholar] [CrossRef]
- Cheng, L.; Zhang, Q.; Tao, F.; Ni, K.; Cheng, Y. A novel search algorithm based on waterweeds reproduction principle for job shop scheduling problem. Int. J. Adv. Manuf. Technol. 2016, 84, 405–424. [Google Scholar] [CrossRef]
- Gowri, R.; Rathipriya, R. Non-Swarm Plant Intelligence Algorithm: BladderWorts Suction (BWS) Algorithm. In Proceedings of the 2018 International Conference on Circuits and Systems in Digital Enterprise Technology (ICCSDET), Kottayam, India, 21–22 December 2018. [Google Scholar] [CrossRef]
- Murase, H. Finite element inverse analysis using a photosynthetic algorithm. Comput. Electron. Agric. 2000, 29, 115–123. [Google Scholar] [CrossRef]
- Eskandar, H.; Sadollah, A.; Bahreininejad, A.; Hamdi, M. Water cycle algorithm—A novel metaheuristic optimization method for solving constrained engineering optimization problems. Comput. Struct. 2012, 110–111, 151–166. [Google Scholar] [CrossRef]
- Rabanal, P.; Rodríguez, I.; Rubio, F. Using river formation dynamics to design heuristic algorithms. In Proceedings of the 6th International Conference, UC 2007, Kingston, CA, Canada, 13–17 August 2007; pp. 163–177. [Google Scholar] [CrossRef]
- Kaveh, A.; Bakhshpoori, T. Water Evaporation Optimization: A novel physically inspired optimization algorithm. Comput. Struct. 2016, 167, 69–85. [Google Scholar] [CrossRef]
- Aghay Kaboli, S.H.; Selvaraj, J.; Rahim, N.A. Rain-fall optimization algorithm: A population based algorithm for solving constrained optimization problems. J. Comput. Sci. 2017, 19, 31–42. [Google Scholar] [CrossRef]
- Wedyan, A.; Whalley, J.; Narayanan, A. Hydrological Cycle Algorithm for Continuous Optimization Problems. J. Optim. 2017, 2017, 3828420. [Google Scholar] [CrossRef] [Green Version]
- Gao-Wei, Y.; Zhanju, H. A Novel Atmosphere Clouds Model Optimization Algorithm. In Proceedings of the 2012 International Conference on Computing, Measurement, Control and Sensor Network, 2012 International Conference on Computing, Measurement, Control and Sensor Network, Taiyuan, China, 7–9 July 2012; pp. 217–220. [Google Scholar] [CrossRef]
- Jiang, Q.; Wang, L.; Hei, X.; Fei, R.; Yang, D.; Zou, F.; Li, H.; Cao, Z.; Lin, Y. Optimal approximation of stable linear systems with a novel and efficient optimization algorithm. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; pp. 840–844. [Google Scholar] [CrossRef]
- Shareef, H.; Ibrahim, A.A.; Mutlag, A.H. Lightning search algorithm. Appl. Soft Comput. 2015, 36, 315–333. [Google Scholar] [CrossRef]
- Nematollahi, A.F.; Rahiminejad, A.; Vahidi, B. A novel physical based meta-heuristic optimization method known as Lightning Attachment Procedure Optimization. Appl. Soft Comput. 2017, 59, 596–621. [Google Scholar] [CrossRef]
- Bayraktar, Z.; Komurcu, M.; Werner, D.H. Wind Driven Optimization (WDO): A novel nature-inspired optimization algorithm and its application to electromagnetics. In Proceedings of the 2010 IEEE Antennas and Propagation Society International Symposium, Toronto, ON, Canada, 11–17 July 2010; pp. 1–4. [Google Scholar] [CrossRef]
- Rbouh, I.; Imrani, A.A. El Hurricane-based Optimization Algorithm. AASRI Procedia 2014, 6, 26–33. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Zhang, Z. Artificial ecosystem-based optimization: A novel nature-inspired meta-heuristic algorithm. Neural Comput. Appl. 2020, 32, 9383–9425. [Google Scholar] [CrossRef]
- Adham, M.T.; Bentley, P.J. An Artificial Ecosystem Algorithm applied to static and Dynamic Travelling Salesman Problems. In Proceedings of the 2014 IEEE International Conference on Evolvable Systems, Orlando, FL, USA, 9–12 December 2014; pp. 149–156. [Google Scholar] [CrossRef]
- Jahedbozorgan, M.; Amjadifard, R. Sunshine: A novel random search for continuous global optimization. In Proceedings of the 2016 1st Conference on Swarm Intelligence and Evolutionary Computation (CSIEC), Bam, Iran, 9–11 March 2016; pp. 12–17. [Google Scholar] [CrossRef]
- Hosseini, E.; Sadiq, A.S.; Ghafoor, K.Z.; Rawat, D.B.; Saif, M.; Yang, X. Volcano eruption algorithm for solving optimization problems. Neural Comput. Appl. 2021, 33, 2321–2337. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar] [CrossRef]
- Freitas, D.; Lopes, L.G.; Morgado-Dias, F. Particle Swarm Optimisation: A Historical Review up to the Current Developments. Entropy 2020, 22, 362. [Google Scholar] [CrossRef] [Green Version]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput. Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Xie, X.-F.; Zhang, W.-J.; Yang, Z.-L. Social cognitive optimization for nonlinear programming problems. In Proceedings of the International Conference on Machine Learning and Cybernetics, Beijing, China, 4–5 November 2002; Volume 2, pp. 779–783. [Google Scholar] [CrossRef]
- Xu, Y.; Cui, Z.; Zeng, J. Social Emotional Optimization Algorithm for Nonlinear Constrained Optimization Problems. In Swarm, Evolutionary, and Memetic Computing: Proceedings of the First International Conference on Swarm, Evolutionary, and Memetic Computing, SEMCCO 2010, Chennai, India, 16–18 December 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 583–590. [Google Scholar] [CrossRef]
- Shi, Y. Brain Storm Optimization Algorithm. In Advances in Swarm Intelligence, Part I: Proceedings of the Second International Conference, ICSI 2011, Chongqing, China, 12–15 June 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 303–309. [Google Scholar] [CrossRef]
- Cheng, S.; Qin, Q.; Chen, J.; Shi, Y. Brain storm optimization algorithm: A review. Artif. Intell. Rev. 2016, 46, 445–458. [Google Scholar] [CrossRef]
- Mousavirad, S.J.; Ebrahimpour-Komleh, H. Human mental search: A new population-based metaheuristic optimization algorithm. Appl. Intell. 2017, 47, 850–887. [Google Scholar] [CrossRef]
- Wang, L.; Ni, H.; Yang, R.; Fei, M.; Ye, W. A Simple Human Learning Optimization Algorithm. In Computational Intelligence, Networked Systems and Their Applications: Proceedings of the International Conference of Life System Modeling and Simulation, LSMS 2014 and International Conference on Intelligent Computing for Sustainable Energy and Environment, ICSEE 2014, Shanghai, China, 20–23 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 56–65. [Google Scholar] [CrossRef]
- Feng, X.; Zou, R.; Yu, H. A novel optimization algorithm inspired by the creative thinking process. Soft Comput. 2015, 19, 2955–2972. [Google Scholar] [CrossRef]
- Atashpaz-Gargari, E.; Lucas, C. Imperialist competitive algorithm: An algorithm for optimization inspired by imperialistic competition. In Proceedings of the 2007 IEEE Congress on Evolutionary Computation, Singapore, 25–28 September 2007; pp. 4661–4667. [Google Scholar] [CrossRef]
- Reynolds, R.G. An Introduction to Cultural Algorithms. In Proceedings of the 3rd Annual Conference on Evolutionary Programming; World Scientific Publishing: Singapore, 1994; pp. 131–139. Available online: https://www.researchgate.net/publication/201976967 (accessed on 20 June 2023).
- Gandomi, A.H. Interior search algorithm (ISA): A novel approach for global optimization. ISA Trans. 2014, 53, 1168–1183. [Google Scholar] [CrossRef] [PubMed]
- Ghorbani, N.; Babaei, E. Exchange market algorithm. Appl. Soft Comput. 2014, 19, 177–187. [Google Scholar] [CrossRef]
- Punnathanam, V.; Kotecha, P. Yin-Yang-pair Optimization: A novel lightweight optimization algorithm. Eng. Appl. Artif. Intell. 2016, 54, 62–79. [Google Scholar] [CrossRef]
- Shayeghi, H.; Dadashpour, J. Anarchic Society Optimization Based PID Control of an Automatic Voltage Regulator (AVR) System. Electr. Electron. Eng. 2012, 2, 199–207. [Google Scholar] [CrossRef] [Green Version]
- Yampolskiy, R.V.; Ashby, L.; Hassan, L. Wisdom of Artificial Crowds—A Metaheuristic Algorithm for Optimization. J. Intell. Learn. Syst. Appl. 2012, 4, 98–107. [Google Scholar] [CrossRef] [Green Version]
- Kulkarni, A.J.; Krishnasamy, G.; Abraham, A. Cohort Intelligence: A Socio-Inspired Optimization Method; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Borji, A. A New Global Optimization Algorithm Inspired by Parliamentary Political Competitions. In MICAI 2007: Advances in Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2007; pp. 61–71. [Google Scholar] [CrossRef]
- Chen, T. A Novel Bionic Intelligent Optimization Algorithm: Artificial Tribe Algorithm and its Performance Analysis. In Proceedings of the 2010 International Conference on Measuring Technology and Mechatronics Automation, Changsha, China, 13–14 March 2010; pp. 222–225. [Google Scholar] [CrossRef]
- Kashan, A.H.; Tavakkoli-Moghaddam, R.; Gen, M. A Warfare Inspired Optimization Algorithm: The Find-Fix-Finish-Exploit-Analyze (F3EA) Metaheuristic Algorithm. In Proceedings of the Tenth International Conference on Management Science and Engineering Management; Springer: Singapore, 2017; pp. 393–408. [Google Scholar] [CrossRef]
- Khormouji, H.B.; Hajipour, H.; Rostami, H. BODMA: A novel metaheuristic algorithm for binary optimization problems based on open source Development Model Algorithm. In Proceedings of the 7’th International Symposium on Telecommunications (IST’2014), Tehran, Iran, 9–11 September 2014; pp. 49–54. [Google Scholar] [CrossRef]
- Chifu, V.R.; Salomie, I.; Chifu, E.Ş.; Pop, C.B.; Poruţiu, P.; Antal, M. Jigsaw inspired metaheuristic for selecting the optimal solution in web service composition. Adv. Intell. Syst. Comput. 2016, 356, 573–584. [Google Scholar] [CrossRef]
- Pincus, M. Letter to the Editor—A Monte Carlo Method for the Approximate Solution of Certain Types of Constrained Optimization Problems. Oper. Res. 1970, 18, 1225–1228. [Google Scholar] [CrossRef] [Green Version]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by Simulated Annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Busetti, F. Simulated Annealing Overview, Lancs. 2003, pp. 1–10. Available online: https://www.aiinfinance.com/saweb.pdf (accessed on 20 August 2021).
- Varty, Z. Simulated Annealing Overview. 2017. Available online: http://lancs.ac.uk/~varty/RTOne.pdf (accessed on 20 August 2021).
- Haddock, J.; Mittenthal, J. Simulation optimization using simulated annealing. Comput. Ind. Eng. 1992, 22, 387–395. [Google Scholar] [CrossRef]
- Formato, R.A. Central force optimization: A new metaheuristic with applications in applied electromagnetics. Prog. Electromagn. Res. 2007, 77, 425–491. [Google Scholar] [CrossRef] [Green Version]
- Rashedi, E.; Nezamabadi-pour, H.; Saryazdi, S. GSA: A Gravitational Search Algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Hatamlou, A. Black hole: A new heuristic optimization approach for data clustering. Inf. Sci. 2013, 222, 175–184. [Google Scholar] [CrossRef]
- Erol, O.K.; Eksin, I. A new optimization method: Big Bang-Big Crunch. Adv. Eng. Softw. 2006, 37, 106–111. [Google Scholar] [CrossRef]
- Hosseini, H.S. Principal components analysis by the galaxy-based search algorithm: A novel metaheuristic for continuous optimisation. Int. J. Comput. Sci. Eng. 2011, 6, 132. [Google Scholar] [CrossRef]
- Muthiah-Nakarajan, V.; Noel, M.M. Galactic Swarm Optimization: A new global optimization metaheuristic inspired by galactic motion. Appl. Soft Comput. J. 2016, 38, 771–787. [Google Scholar] [CrossRef]
- Hsiao, Y.T.; Chuang, C.L.; Jiang, J.A.; Chien, C.C. A novel optimization algorithm: Space gravitational optimization. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; pp. 2323–2328. [Google Scholar] [CrossRef]
- Flores, J.J.; Lopez, R.; Barrera, J. Gravitational interactions optimization. In Learning and Intelligent Optimization: Proceedings of the 5th International Conference, LION 5, Rome, Italy, 17–21 January 2011; Springer: Berlin/Heidelberg, Germany, 2011; pp. 226–237. [Google Scholar] [CrossRef]
- Beiranvand, H.; Rokrok, E. General Relativity Search Algorithm: A Global Optimization Approach. Int. J. Comput. Intell. Appl. 2015, 14, 1550017. [Google Scholar] [CrossRef]
- Bendato, I.; Cassettari, L.; Giribone, P.G.; Fioribello, S. Attraction Force Optimization (AFO): A deterministic nature-inspired heuristic for solving optimization problems in stochastic simulation. Appl. Math. Sci. 2016, 10, 989–1011. [Google Scholar] [CrossRef]
- Kilinç, N.; Mahouti, P.; Güneş, F. Space gravity optimization applied to the feasible design target space required for a wide-band front-end amplifier. Prog. Electromagn. Res. Symp. 2013, 2013, 1495–1499. [Google Scholar]
- Hudaib, A.A.; Fakhouri, H.N. Supernova Optimizer: A Novel Natural Inspired Meta-Heuristic. Mod. Appl. Sci. 2017, 12, 32. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2016, 27, 495–513. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Zhang, Z. Atom search optimization and its application to solve a hydrogeologic parameter estimation problem. Knowledge-Based Syst. 2019, 163, 283–304. [Google Scholar] [CrossRef]
- Rahmanzadeh, S.; Pishvaee, M.S. Electron radar search algorithm: A novel developed meta-heuristic algorithm. Soft Comput. 2020, 24, 8443–8465. [Google Scholar] [CrossRef]
- Wei, Z.; Huang, C.; Wang, X.; Han, T.; Li, Y. Nuclear Reaction Optimization: A Novel and Powerful Physics-Based Algorithm for Global Optimization. IEEE Access 2019, 7, 1–9. [Google Scholar] [CrossRef]
- Yalcin, Y.; Pekcan, O. Nuclear Fission–Nuclear Fusion algorithm for global optimization: A modified Big Bang–Big Crunch algorithm. Neural Comput. Appl. 2020, 32, 2751–2783. [Google Scholar] [CrossRef]
- Birbil, Ş.I.; Fang, S.C. An electromagnetism-like mechanism for global optimization. J. Glob. Optim. 2003, 25, 263–282. [Google Scholar] [CrossRef]
- Abedinpourshotorban, H.; Mariyam Shamsuddin, S.; Beheshti, Z.; Jawawi, D.N.A. Electromagnetic field optimization: A physics-inspired metaheuristic optimization algorithm. Swarm Evol. Comput. 2016, 26, 8–22. [Google Scholar] [CrossRef]
- Yadav, A. AEFA: Artificial electric field algorithm for global optimization. Swarm Evol. Comput. 2019, 48, 93–108. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.H. Electrostatic discharge algorithm: A novel nature-inspired optimisation algorithm and its application to worst-case tolerance analysis of an EMC filter. IET Sci. Meas. Technol. 2019, 13, 518–522. [Google Scholar] [CrossRef]
- Fadafen, M.K.; Mehrshad, N.; Zahiri, S.H.; Razavi, S.M. A New Algorithm for Optimization Based on Ohm’s Law. CIVILICA 2017, 1, 16–22. [Google Scholar]
- Kaveh, A.; Talatahari, S. A novel heuristic optimization method: Charged system search. Acta Mech. 2010, 213, 267–289. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Aghaei, J.; Akbari, E.; Li, L. CFA optimizer: A new and powerful algorithm inspired by Franklin’s and Coulomb’s laws theory for solving the economic load dispatch problems. Int. Trans. Electr. Energy Syst. 2018, 28, e2536. [Google Scholar] [CrossRef] [Green Version]
- Zaránd, G.; Pázmándi, F.; Pál, K.F.; Zimányi, G.T. Using hysteresis for optimization. Phys. Rev. Lett. 2002, 89, 150201. [Google Scholar] [CrossRef] [Green Version]
- Sadollah, A.; Bahreininejad, A.; Eskandar, H.; Hamdi, M. Mine blast algorithm: A new population based algorithm for solving constrained engineering optimization problems. Appl. Soft Comput. J. 2013, 13, 2592–2612. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras, A. A novel meta-heuristic optimization algorithm: Thermal exchange optimization. Adv. Eng. Softw. 2017, 110, 69–84. [Google Scholar] [CrossRef]
- Ahrari, A.; Atai, A.A. Grenade Explosion Method—A novel tool for optimization of multimodal functions. Appl. Soft Comput. J. 2010, 10, 1132–1140. [Google Scholar] [CrossRef]
- Patel, V.K.; Savsani, V.J. Heat transfer search (HTS): A novel optimization algorithm. Inf. Sci. 2015, 324, 217–246. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W.; Mirjalili, S. Henry gas solubility optimization: A novel physics-based algorithm. Futur. Gener. Comput. Syst. 2019, 101, 646–667. [Google Scholar] [CrossRef]
- Abdechiri, M.; Meybodi, M.R.; Bahrami, H. Gases brownian motion optimization: An algorithm for optimization (GBMO). Appl. Soft Comput. J. 2013, 13, 2932–2946. [Google Scholar] [CrossRef]
- Moein, S.; Logeswaran, R. KGMO: A swarm optimization algorithm based on the kinetic energy of gas molecules. Inf. Sci. 2014, 275, 127–144. [Google Scholar] [CrossRef]
- Varaee, H.; Ghasemi, M.R. Engineering optimization based on ideal gas molecular movement algorithm. Eng. Comput. 2017, 33, 71–93. [Google Scholar] [CrossRef]
- Zheng, Y.J. Water wave optimization: A new nature-inspired metaheuristic. Comput. Oper. Res. 2015, 55, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Doʇan, B.; Ölmez, T. A new metaheuristic for numerical function optimization: Vortex Search algorithm. Inf. Sci. 2015, 293, 125–145. [Google Scholar] [CrossRef]
- Shah-Hosseini, H. Intelligent water drops algorithm. Int. J. Intell. Comput. Cybern. 2008, 1, 193–212. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl-Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]
- Ali, J.; Saeed, M.; Luqman, M.; Tabassum, M.F. Artificial Showering Algorithm: A New Meta-Heuristic for Unconstrained Optimization. Sci. Int. 2015, 27, 4939–4942. [Google Scholar]
- Colak, M.E.; Varol, A. A Novel Intelligent Optimization Algorithm Inspired from Circular Water Waves. Elektron. Elektrotechnika 2015, 21, 3–6. [Google Scholar] [CrossRef] [Green Version]
- Cortés-Toro, E.M.; Crawford, B.; Gómez-Pulido, J.A.; Soto, R.; Lanza-Gutiérrez, J.M. A new metaheuristic inspired by the vapour-liquid equilibrium for continuous optimization. Appl. Sci. 2018, 8, 2080. [Google Scholar] [CrossRef] [Green Version]
- Tahani, M.; Babayan, N. Flow Regime Algorithm (FRA): A physics-based meta-heuristics algorithm. Knowl. Inf. Syst. 2019, 60, 1001–1038. [Google Scholar] [CrossRef]
- Zou, Y. The whirlpool algorithm based on physical phenomenon for solving optimization problems. Eng. Comput. 2019, 36, 664–690. [Google Scholar] [CrossRef]
- Kaveh, A.; Mahdavi, V.R. Colliding bodies optimization: A novel meta-heuristic method. Comput. Struct. 2014, 139, 18–27. [Google Scholar] [CrossRef]
- Javidy, B.; Hatamlou, A.; Mirjalili, S. Ions motion algorithm for solving optimization problems. Appl. Soft Comput. J. 2015, 32, 72–79. [Google Scholar] [CrossRef]
- Kaveh, A.; Ilchi Ghazaan, M. A new meta-heuristic algorithm: Vibrating particles system. Sci. Iran. 2017, 24, 551–566. [Google Scholar] [CrossRef] [Green Version]
- Sacco, W.F.; de Oliveira, C.R.E. A new stochastic optimization algorithm based on a particle collision metaheuristic. In Proceedings of the 6th World Congresses of Structural and Multidisciplinary Optimization, Rio de Janeiro, Brazil, 30 May–3 June 2005. [Google Scholar]
- Mejía-de-Dios, J.-A.; Mezura-Montes, E. A New Evolutionary Optimization Method Based on Center of Mass. In Decision Science in Action: Theory and Applications of Modern Decision Analytic Optimisation; Springer: Berlin/Heidelberg, Germany, 2019; pp. 65–74. [Google Scholar] [CrossRef]
- Xie, L.; Zeng, J.; Cui, Z. General framework of artificial physics optimization algorithm. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; pp. 1321–1326. [Google Scholar] [CrossRef]
- Cuevas, E.; Echavarría, A.; Ramírez-Ortegón, M.A. An optimization algorithm inspired by the States of Matter that improves the balance between exploration and exploitation. Appl. Intell. 2014, 40, 256–272. [Google Scholar] [CrossRef] [Green Version]
- Kaveh, A.; Khayatazad, M. A new meta-heuristic method: Ray Optimization. Comput. Struct. 2012, 112–113, 283–294. [Google Scholar] [CrossRef]
- Husseinzadeh Kashan, A. A new metaheuristic for optimization: Optics inspired optimization (OIO). Comput. Oper. Res. 2015, 55, 99–125. [Google Scholar] [CrossRef]
- Baykasoğlu, A.; Akpinar, Ş. Weighted Superposition Attraction (WSA): A swarm intelligence algorithm for optimization problems—Part 1: Unconstrained optimization. Appl. Soft Comput. J. 2017, 56, 520–540. [Google Scholar] [CrossRef]
- Tzanetos, A.; Dounias, G. A new metaheuristic method for optimization: Sonar inspired optimization. Commun. Comput. Inf. Sci. 2017, 744, 417–428. [Google Scholar] [CrossRef]
- Feng, X.; Ma, M.; Yu, H. Crystal energy optimization algorithm. Comput. Intell. 2016, 32, 284–322. [Google Scholar] [CrossRef]
- Dehghani, M.; Montazeri, Z.; Dehghani, A.; Nouri, N.; Seifi, A. BSSA: Binary spring search algorithm. In Proceedings of the 2017 IEEE 4th International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 22–22 December 2017; pp. 0220–0224. [Google Scholar] [CrossRef]
- Tan, Y.; Zhu, Y. Fireworks algorithm for optimization. In International Conference in Swarm Intelligence: Proceedings of the First International Conference, ICSI 2010, Beijing, China, 12–15 June 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 355–364. [Google Scholar] [CrossRef]
- Lam, A.Y.S.; Li, V.O.K. Chemical-Reaction-Inspired Metaheuristic for Optimization. IEEE Trans. Evol. Comput. 2010, 14, 381–399. [Google Scholar] [CrossRef] [Green Version]
- Alatas, B. ACROA: Artificial Chemical Reaction Optimization Algorithm for global optimization. Expert Syst. Appl. 2011, 38, 13170–13180. [Google Scholar] [CrossRef]
- Siddique, N.; Adeli, H. Nature-Inspired Chemical Reaction Optimisation Algorithms. Cognit. Comput. 2017, 9, 411–422. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowledge-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Salimi, H. Stochastic Fractal Search: A powerful metaheuristic algorithm. Knowledge-Based Syst. 2015, 75, 1–18. [Google Scholar] [CrossRef]
- Ibrahim, Z.; Aziz, N.H.A.; Aziz, N.A.A.; Razali, S.; Mohamad, M.S. Simulated Kalman Filter: A Novel Estimation-Based Metaheuristic Optimization Algorithm. Adv. Sci. Lett. 2016, 22, 2941–2946. [Google Scholar] [CrossRef]
- Salem, S.A. BOA: A novel optimization algorithm. In Proceedings of the 2012 International Conference on Engineering and Technology (ICET), Cairo, Egypt, 10–11 October 2012; pp. 1–5. [Google Scholar] [CrossRef]
- TANYILDIZI, E.; DEMIR, G. Golden Sine Algorithm: A Novel Math-Inspired Algorithm. Adv. Electr. Comput. Eng. 2017, 17, 71–78. [Google Scholar] [CrossRef]
- Zhao, J.; Tang, D.; Liu, Z.; Cai, Y.; Dong, S. Spherical search optimizer: A simple yet efficient meta-heuristic approach. Neural Comput. Appl. 2020, 32, 9777–9808. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Ashrafi, S.M.; Dariane, A.B. A novel and effective algorithm for numerical optimization: Melody Search (MS). In Proceedings of the 2011 11th International Conference on Hybrid Intelligent Systems (HIS), Melacca, Malaysia, 5–8 December 2011; pp. 109–114. [Google Scholar] [CrossRef]
- Weyland, D. A Rigorous Analysis of the Harmony Search Algorithm. Int. J. Appl. Metaheuristic Comput. 2010, 1, 50–60. [Google Scholar] [CrossRef] [Green Version]
- Mora-Gutiérrez, R.A.; Ramírez-Rodríguez, J.; Rincón-García, E.A. An optimization algorithm inspired by musical composition. Artif. Intell. Rev. 2014, 41, 301–315. [Google Scholar] [CrossRef]
- Kashan, A.H. League Championship Algorithm: A New Algorithm for Numerical Function Optimization. In Proceedings of the 2009 International Conference of Soft Computing and Pattern Recognition, Malacca, Malaysia, 4–7 December 2009; pp. 43–48. [Google Scholar] [CrossRef]
- Osaba, E.; Diaz, F.; Onieva, E. Golden ball: A novel meta-heuristic to solve combinatorial optimization problems based on soccer concepts. Appl. Intell. 2014, 41, 145–166. [Google Scholar] [CrossRef]
- Moosavian, N.; Roodsari, B.K. Soccer League Competition Algorithm, a New Method for Solving Systems of Nonlinear Equations. Int. J. Intell. Sci. 2014, 4, 7–16. [Google Scholar] [CrossRef]
- Fadakar, E.; Ebrahimi, M. A new metaheuristic football game inspired algorithm. In Proceedings of the 2016 1st Conference on Swarm Intelligence and Evolutionary Computation (CSIEC), Bam, Iran, 9–11 March 2016; pp. 6–11. [Google Scholar] [CrossRef]
- Kaveh, A.; Zolghadr, A. a Novel Meta-Heuristic Algorithm: Tug of War Optimization. Int. J. Optim. Civ. Eng. Int. J. Optim. Civ. Eng 2016, 6, 469–492. [Google Scholar]
- Blum, C.; Puchinger, J.; Raidl, G.R.; Roli, A. Hybrid metaheuristics in combinatorial optimization: A survey. Appl. Soft Comput. 2011, 11, 4135–4151. [Google Scholar] [CrossRef] [Green Version]
- Nabil, E. A Modified Flower Pollination Algorithm for Global Optimization. Expert Syst. Appl. 2016, 57, 192–203. [Google Scholar] [CrossRef]
- Tseng, L.-Y.; Liang, S.-C. A Hybrid Metaheuristic for the Quadratic Assignment Problem. Comput. Optim. Appl. 2006, 34, 85–113. [Google Scholar] [CrossRef]
- D’Andreagiovanni, F.; Krolikowski, J.; Pulaj, J. A fast hybrid primal heuristic for multiband robust capacitated network design with multiple time periods. Appl. Soft Comput. 2015, 26, 497–507. [Google Scholar] [CrossRef] [Green Version]
- Fontes, D.B.M.M.; Homayouni, S.M.; Gonçalves, J.F. A hybrid particle swarm optimization and simulated annealing algorithm for the job shop scheduling problem with transport resources. Eur. J. Oper. Res. 2023, 306, 1140–1157. [Google Scholar] [CrossRef]
- Binu, D.; Selvi, M.; George, A. MKF-Cuckoo: Hybridization of Cuckoo Search and Multiple Kernel-based Fuzzy C-means Algorithm. AASRI Procedia 2013, 4, 243–249. [Google Scholar] [CrossRef]
- Yue, Z.; Zhang, S.; Xiao, W. A Novel Hybrid Algorithm Based on Grey Wolf Optimizer and Fireworks Algorithm. Sensors 2020, 20, 2147. [Google Scholar] [CrossRef] [Green Version]
- Jia, H.; Xing, Z.; Song, W. A New Hybrid Seagull Optimization Algorithm for Feature Selection. IEEE Access 2019, 7, 49614–49631. [Google Scholar] [CrossRef]
- Zhang, Z.; Ding, S.; Jia, W. A hybrid optimization algorithm based on cuckoo search and differential evolution for solving constrained engineering problems. Eng. Appl. Artif. Intell. 2019, 85, 254–268. [Google Scholar] [CrossRef]
- Dey, B.; Raj, S.; Mahapatra, S.; Márquez, F.P.G. Optimal scheduling of distributed energy resources in microgrid systems based on electricity market pricing strategies by a novel hybrid optimization technique. Int. J. Electr. Power Energy Syst. 2022, 134, 107419. [Google Scholar] [CrossRef]
- Kottath, R.; Singh, P.; Bhowmick, A. Swarm-based hybrid optimization algorithms: An exhaustive analysis and its applications to electricity load and price forecasting. Soft Comput. 2023, 1–32. [Google Scholar] [CrossRef] [PubMed]
- Yeniay, Ö. Penalty Function Methods for Constrained Optimization with Genetic Algorithms. Math. Comput. Appl. 2005, 10, 45–56. [Google Scholar] [CrossRef] [Green Version]
- Mezura-Montes, E.; Coello Coello, C.A. Constraint-handling in nature-inspired numerical optimization: Past, present and future. Swarm Evol. Comput. 2011, 1, 173–194. [Google Scholar] [CrossRef]
- Chehouri, A.; Younes, R.; Perron, J.; Ilinca, A. A constraint-handling technique for genetic algorithms using a violation factor. J. Comput. Sci. 2016, 12, 350–362. [Google Scholar] [CrossRef] [Green Version]
- Gen, M.; Cheng, R. A survey of penalty techniques in genetic algorithms. In Proceedings of the IEEE International Conference on Evolutionary Computation, Nagoya, Japan, 20–22 May 1996; pp. 804–809. [Google Scholar] [CrossRef]
- Jordehi, A.R. A review on constraint handling strategies in particle swarm optimisation. Neural Comput. Appl. 2015, 26, 1265–1275. [Google Scholar] [CrossRef]
- Vrbančič, G.; Brezočnik, L.; Mlakar, U.; Fister, D.; Fister, I., Jr. NiaPy: Python microframework for building nature-inspired algorithms. J. Open Source Softw. 2018, 3, 613. [Google Scholar] [CrossRef]
- Darvishpoor, S.; Darvishpour, A. NIA, PYPI. 2021. Available online: https://pypi.org/project/nia/ (accessed on 9 May 2022).
- Darvishpoor, S. Nature Inspired Algorithms Review, GitHub. 2022. Available online: https://github.com/shahind/Nature-Inspired-Algorithms-Review (accessed on 4 March 2022).
- Jamil, M.; Yang, X.S. A literature survey of benchmark functions for global optimisation problems. Int. J. Math. Model. Numer. Optim. 2013, 4, 150–194. [Google Scholar] [CrossRef] [Green Version]
- Bingham, D. Optimization Test Problems, Simon Fraser Univ. 2013. Available online: https://www.sfu.ca/~ssurjano/optimization.html (accessed on 4 March 2022).
- Al-Roomi, A.R. Unconstrained Multi-Objective Benchmark Functions Repository. 2016. Available online: https://www.al-roomi.org/benchmarks/multi-objective/unconstrained-list (accessed on 20 June 2023).
- Darvishpoor, S.; Darvishpour, A. Modified NiaPy, GitHub. 2022. Available online: https://github.com/salar-shdk/NiaPy (accessed on 21 June 2022).
- Digalakis, J.G.; Margaritis, K.G. On benchmarking functions for genetic algorithms. Int. J. Comput. Math. 2001, 77, 481–506. [Google Scholar] [CrossRef]
- Chen, H.; Zhu, Y.; Hu, K. Adaptive Bacterial Foraging Optimization. Abstr. Appl. Anal. 2011, 2011, 108269. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Lu, P.; Pan, B. Survey of convex optimization for aerospace applications. Astrodynamics 2017, 1, 23–40. [Google Scholar] [CrossRef]
- Padula, S.L.; Gumbert, C.R.; Li, W. Aerospace applications of optimization under uncertainty. Optim. Eng. 2006, 7, 317–328. [Google Scholar] [CrossRef] [Green Version]
- Mieloszyk, J. Practical problems of numerical optimization in aerospace sciences. Aircr. Eng. Aerosp. Technol. 2017, 89, 570–578. [Google Scholar] [CrossRef] [Green Version]
- Lian, Y.; Oyama, A.; Liou, M.-S. Progress in design optimization using evolutionary algorithms for aerodynamic problems. Prog. Aerosp. Sci. 2010, 46, 199–223. [Google Scholar] [CrossRef]
- Gage, P.J. New Approaches to Optimisation in Aerospace Conceptual Design; Stanford University: Stanford, CA, USA, 1994. [Google Scholar]
- Crossley, W.A.; Laananen, D.H. Conceptual design of helicopters via genetic algorithm. J. Aircr. 1996, 33, 1062–1070. [Google Scholar] [CrossRef]
- Champasak, P.; Panagant, N.; Bureerat, S.; Pholdee, N. Investigation on the performance of meta-heuristics for solving single objective conceptual design of a conventional fixed wing unmanned aerial vehicle. J. Res. Appl. Mech. Eng. 2022, 10, 1. [Google Scholar]
- Jafarsalehi, A.; Fazeley, H.R.; Mirshams, M. Conceptual Remote Sensing Satellite Design Optimization under uncertainty. Aerosp. Sci. Technol. 2016, 55, 377–391. [Google Scholar] [CrossRef]
- Jilla, C.; Miller, D. A Multiobjective, Multidisciplinary Design Optimization Methodology for the Conceptual Design of Distributed Satellite Systems. In Proceedings of the 9th AIAA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, Panama City Beach, FL, USA, 4–6 September 2002; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2002. [Google Scholar] [CrossRef] [Green Version]
- Abedini, A.; Bataleblu, A.A.; Roshanian, J. Co-design Optimization of a Novel Multi-identity Drone Helicopter (MICOPTER). J. Intell. Robot. Syst. 2022, 106, 56. [Google Scholar] [CrossRef] [PubMed]
- HASSANALIAN, M.; SALAZAR, R.; ABDELKEFI, A. Conceptual design and optimization of a tilt-rotor micro air vehicle. Chin. J. Aeronaut. 2019, 32, 369–381. [Google Scholar] [CrossRef]
- Blasi, L.; Core, G. Del Particle Swarm Approach in Finding Optimum Aircraft Configuration. J. Aircr. 2007, 44, 679–683. [Google Scholar] [CrossRef]
- Corrado, G.; Ntourmas, G.; Sferza, M.; Traiforos, N.; Arteiro, A.; Brown, L.; Chronopoulos, D.; Daoud, F.; Glock, F.; Ninic, J.; et al. Recent progress, challenges and outlook for multidisciplinary structural optimization of aircraft and aerial vehicles. Prog. Aerosp. Sci. 2022, 135, 100861. [Google Scholar] [CrossRef]
- Sobieszczanski-Sobieski, J.; Haftka, R.T. Multidisciplinary aerospace design optimization: Survey of recent developments. Struct. Optim. 1997, 14, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Keane, A.; Scanlan, J. Design search and optimization in aerospace engineering. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 2501–2529. [Google Scholar] [CrossRef]
- Neufeld, D.; Chung, J.; Behdinan, K. Development of a flexible MDO architecture for aircraft conceptual design. In Proceedings of the 2008 EngOpt conference (International Conference on Engineering Optimization), Rio de Janeiro, Brazil, 1–5 June 2008; pp. 1–8. [Google Scholar]
- Ganguli, R.; Rajagopal, S. Multidisciplinary Design Optimization of an UAV Wing Using Kriging Based Multi-Objective Genetic Algorithm. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2009. [Google Scholar] [CrossRef] [Green Version]
- Ampellio, E.; Bertini, F.; Ferrero, A.; Larocca, F.; Vassio, L. Turbomachinery design by a swarm-based optimization method coupled with a CFD solver. Adv. Aircr. Spacecr. Sci. 2016, 3, 149–170. [Google Scholar] [CrossRef] [Green Version]
- Jafari, S.; Nikolaidis, T. Meta-heuristic global optimization algorithms for aircraft engines modelling and controller design; A review, research challenges, and exploring the future. Prog. Aerosp. Sci. 2019, 104, 40–53. [Google Scholar] [CrossRef]
- Gur, O.; Rosen, A. Optimizing Electric Propulsion Systems for Unmanned Aerial Vehicles. J. Aircr. 2009, 46, 1340–1353. [Google Scholar] [CrossRef] [Green Version]
- Pelz, P.F.; Leise, P.; Meck, M. Sustainable aircraft design—A review on optimization methods for electric propulsion with derived optimal number of propulsors. Prog. Aerosp. Sci. 2021, 123, 100714. [Google Scholar] [CrossRef]
- Wang, X.; Damodaran, M. Comparison of Deterministic and Stochastic Optimization Algorithms for Generic Wing Design Problems. J. Aircr. 2000, 37, 929–932. [Google Scholar] [CrossRef]
- Boulkabeit, I.; Mthembu, L.; Marwala, T.; de Neto, F.B.L. Finite Element Model Updating Using Fish School Search Optimization Method. In Proceedings of the 2013 BRICS Congress on Computational Intelligence and 11th Brazilian Congress on Computational Intelligence, Ipojuca, Brazil, 8–11 September 2013; pp. 447–452. [Google Scholar] [CrossRef] [Green Version]
- Toropov, V.V.; Jones, R.; Willment, T.; Funnell, M. Weight and Manufacturability Optimization of Composite Aircraft Components Based on a Genetic Algorithm. In Proceedings of the 6th World Congresses of Structural and Multidisciplinary Optimization, Rio de Janeiro, Brazil, 30 May–3 June 2005. [Google Scholar]
- Viana, F.A.C.; Steffen, V.; Butkewitsch, S.; de Freitas Leal, M. Optimization of aircraft structural components by using nature-inspired algorithms and multi-fidelity approximations. J. Glob. Optim. 2009, 45, 427–449. [Google Scholar] [CrossRef]
- Sandeep, R.; Jeevanantham, A.K.; Manikandan, M.; Arivazhagan, N.; Tofil, S. Multi-Performance Optimization in Friction Stir Welding of AA6082/B4C Using Genetic Algorithm and Desirability Function Approach for Aircraft Wing Structures. J. Mater. Eng. Perform. 2021, 30, 5845–5857. [Google Scholar] [CrossRef]
- Weis, L.; Koke, H.; Huhne, C. Structural optimisation of a composite aircraft frame applying a particle swarm algorithm. In Proceedings of the 2015 IEEE Congress on Evolutionary Computation (CEC), Sendai, Japan, 25–28 May 2015; pp. 582–588. [Google Scholar] [CrossRef]
- Keshtegar, B.; Hao, P.; Wang, Y.; Hu, Q. An adaptive response surface method and Gaussian global-best harmony search algorithm for optimization of aircraft stiffened panels. Appl. Soft Comput. 2018, 66, 196–207. [Google Scholar] [CrossRef]
- Varatharajoo, R.; Romli, F.I.; Ahmad, K.A.; Majid, D.L.; Mustapha, F. Aeroelastic Tailoring of Composite Wing Design Using Bee Colony Optimisation. Appl. Mech. Mater. 2014, 629, 182–188. [Google Scholar] [CrossRef]
- Georgiou, G.; Vio, G.A.; Cooper, J.E. Aeroelastic tailoring and scaling using Bacterial Foraging Optimisation. Struct. Multidiscip. Optim. 2014, 50, 81–99. [Google Scholar] [CrossRef]
- de Wit, A.J.; Lammen, W.F.; Vankan, W.J.; Timmermans, H.; van der Laan, T.; Ciampa, P.D. Aircraft rudder optimization—A multi-level and knowledge-enabled approach. Prog. Aerosp. Sci. 2020, 119, 100650. [Google Scholar] [CrossRef]
- Li, J.; Du, X.; Martins, J.R.R.A. Machine learning in aerodynamic shape optimization. Prog. Aerosp. Sci. 2022, 134, 100849. [Google Scholar] [CrossRef]
- Giannakoglou, K.C. Design of optimal aerodynamic shapes using stochastic optimization methods and computational intelligence. Prog. Aerosp. Sci. 2002, 38, 43–76. [Google Scholar] [CrossRef]
- Yu, Y.; Lyu, Z.; Xu, Z.; Martins, J.R.R.A. On the influence of optimization algorithm and initial design on wing aerodynamic shape optimization. Aerosp. Sci. Technol. 2018, 75, 183–199. [Google Scholar] [CrossRef]
- Olhofer, M.; Jin, Y.; Sendhoff, B. Adaptive encoding for aerodynamic shape optimization using evolution strategies. In Proceedings of the 2001 Congress on Evolutionary Computation (IEEE Cat. No.01TH8546), Seoul, Republic of Korea, 27–30 May 2001; Volume 1, pp. 576–583. [Google Scholar] [CrossRef]
- Tian, X.; Li, J. A novel improved fruit fly optimization algorithm for aerodynamic shape design optimization. Knowl-Based Syst. 2019, 179, 77–91. [Google Scholar] [CrossRef]
- Hoyos, J.; Jímenez, J.H.; Echavarría, C.; Alvarado, J.P. Airfoil Shape Optimization: Comparative Study of Meta-heuristic Algorithms, Airfoil Parameterization Methods and Reynolds Number Impact. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1154, 012016. [Google Scholar] [CrossRef]
- Naumann, D.S.; Evans, B.; Walton, S.; Hassan, O. A novel implementation of computational aerodynamic shape optimisation using Modified Cuckoo Search. Appl. Math. Model. 2016, 40, 4543–4559. [Google Scholar] [CrossRef]
- Derakhshan, S.; Tavaziani, A.; Kasaeian, N. Numerical Shape Optimization of a Wind Turbine Blades Using Artificial Bee Colony Algorithm. J. Energy Resour. Technol. 2015, 137, 051210. [Google Scholar] [CrossRef]
- Hoseynipoor, M.; Malek Jafarian, M.; Safavinejad, A. Two-objective optimization of aerodynamic shapes using gravitational search algorithm. Modares Mech. Eng. 2017, 17, 211–220. [Google Scholar]
- Jalili, F.; MalekJafarian, S.M.; Safavinejad, A.; Masoumi, H. A New Modified Harmony Search Optimization Algorithm for Evaluating Airfoil Shape Parameterization Methods and Aerodynamic Optimization. Iran. J. Mech. Eng. Trans. ISME 2022, 23, 80–104. [Google Scholar]
- Jalili, F.; Malek-Jafarian, M.; Safavinejad, A. Introduction of Harmony Search Algorithm for Aerodynamic Shape Optimization Using. J. Appl. Comput. Sci. Mech. 2013, 24, 81–96. [Google Scholar]
- Darvishpoor, S.; Roshanian, J.; Raissi, A.; Hassanalian, M. Configurations, flight mechanisms, and applications of unmanned aerial systems: A review. Prog. Aerosp. Sci. 2020, 121, 100694. [Google Scholar] [CrossRef]
- Keane, A.J. Wing Optimization Using Design of Experiment, Response Surface, and Data Fusion Methods. J. Aircr. 2003, 40, 741–750. [Google Scholar] [CrossRef]
- Vicini, A.; Quagliarella, D. Airfoil and Wing Design Through Hybrid Optimization Strategies. AIAA J. 1999, 37, 634–641. [Google Scholar] [CrossRef]
- Venter, G.; Sobieszczanski-Sobieski, J. Multidisciplinary optimization of a transport aircraft wing using particle swarm optimization. Struct. Multidiscip. Optim. 2004, 26, 121–131. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Guo, S.; Yang, W. Simultaneous partial topology and size optimization of a wing structure using ant colony and gradient based methods. Eng. Optim. 2011, 43, 433–446. [Google Scholar] [CrossRef] [Green Version]
- Martinez, A.D.; Osaba, E.; Oregi, I.; Fister, I.; Fister, I.; Ser, J. Del Hybridizing differential evolution and novelty search for multimodal optimization problems. In Proceedings of the Genetic and Evolutionary Computation Conference Companion, Prague, Czech Republic, 13–17 July 2019; ACM: New York, NY, USA, 2019; pp. 1980–1989. [Google Scholar]
- Li, Y.; Ge, W.; Zhou, J.; Zhang, Y.; Zhao, D.; Wang, Z.; Dong, D. Design and experiment of concentrated flexibility-based variable camber morphing wing. Chin. J. Aeronaut. 2019, 35, 455–469. [Google Scholar] [CrossRef]
- Koreanschi, A.; Sugar Gabor, O.; Acotto, J.; Brianchon, G.; Portier, G.; Botez, R.M.; Mamou, M.; Mebarki, Y. Optimization and design of an aircraft’s morphing wing-tip demonstrator for drag reduction at low speed, Part I—Aerodynamic optimization using genetic, bee colony and gradient descent algorithms. Chin. J. Aeronaut. 2017, 30, 149–163. [Google Scholar] [CrossRef]
- Darvishpoor, S.; Roshanian, J.; Tayefi, M. A novel concept of VTOL bi-rotor UAV based on moving mass control. Aerosp. Sci. Technol. 2020, 107, 106238. [Google Scholar] [CrossRef]
- Sudmeijer, K.; Mooij, E. Shape Optimization for a Small Experimental Re-entry Module. In Proceedings of the AIAA/AAAF 11th International Space Planes and Hypersonic Systems and Technologies Conference, Orleans, France, 29 September–4 October 2002; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2002. [Google Scholar]
- Suzdaltsev, I.V.; Chermoshencev, S.F.; Bogula, N.Y. Genetic algorithm for onboard equipment placement inside the unmanned aerial vehicle fuselage. In Proceedings of the 2016 XIX IEEE International Conference on Soft Computing and Measurements (SCM), St. Petersburg, Russia, 25–27 May 2016; pp. 262–264. [Google Scholar] [CrossRef]
- Li, L.; Chen, M.; Cao, F.; Ma, Y. Coaxial helicopter optimum dynamics design based on multi-objective bat algorithm and experimental validation. In Proceedings of the 2017 8th International Conference on Mechanical and Aerospace Engineering (ICMAE), Prague, Czech Republic, 22–25 July 2017; pp. 411–415. [Google Scholar] [CrossRef]
- Viviani, A.; Iuspa, L.; Aprovitola, A. An optimization-based procedure for self-generation of Re-entry Vehicles shape. Aerosp. Sci. Technol. 2017, 68, 123–134. [Google Scholar] [CrossRef]
- Arora, R.; Kumar, P. Aerodynamic Shape Optimization of a Re-entry Capsule. In AIAA Atmospheric Flight Mechanics Conference and Exhibit; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2003. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, J.; Zhang, A.; Wang, Y.; Zhao, W. Parametric geometric model and hydrodynamic shape optimization of a flying-wing structure underwater glider. China Ocean Eng. 2017, 31, 709–715. [Google Scholar] [CrossRef]
- Rodríguez-Cortés, H.; Arias-Montaño, A. Robust geometric sizing of a small flying wing planform based on evolutionary algorithms. Aeronaut. J. 2012, 116, 175–188. [Google Scholar] [CrossRef]
- Chen, X.; Yao, W.; Zhao, Y.; Chen, X.; Zhang, J.; Luo, Y. The Hybrid Algorithms Based on Differential Evolution for Satellite Layout Optimization Design. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Israr, A.; Ali, Z.A.; Alkhammash, E.H.; Jussila, J.J. Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review. Drones 2022, 6, 126. [Google Scholar] [CrossRef]
- Konatowski, S.; Pawłowski, P. Application of the ACO algorithm for UAV path planning. Prz. Elektrotechniczny 2019, 95, 115–119. [Google Scholar] [CrossRef]
- Yu, X.; Li, C.; Zhou, J. A constrained differential evolution algorithm to solve UAV path planning in disaster scenarios. Knowl-Based Syst. 2020, 204, 106209. [Google Scholar] [CrossRef]
- Li, Z.; Xia, X.; Yan, Y. A Novel Semidefinite Programming-based UAV 3D Localization Algorithm with Gray Wolf Optimization. Drones 2023, 7, 113. [Google Scholar] [CrossRef]
- Shen, Y.; Zhu, Y.; Kang, H.; Sun, X.; Chen, Q.; Wang, D. UAV Path Planning Based on Multi-Stage Constraint Optimization. Drones 2021, 5, 144. [Google Scholar] [CrossRef]
- Lin, N.; Tang, J.; Li, X.; Zhao, L. A novel improved bat algorithm in UAV path planning. Comput. Mater. Contin. 2019, 61, 323–344. [Google Scholar] [CrossRef]
- Wang, Y.; Li, K.; Han, Y.; Ge, F.; Xu, W.; Liu, L. Tracking a dynamic invading target by UAV in oilfield inspection via an improved bat algorithm. Appl. Soft Comput. 2020, 90, 106150. [Google Scholar] [CrossRef]
- Kumar, P.; Narayan, S. Multi-objective bat algorithm tuned optimal FOPID controller for robust aircraft pitch control. Int. J. Syst. Control Commun. 2017, 8, 348. [Google Scholar] [CrossRef]
- Xie, J.; Zhou, Y.; Zheng, H. A Hybrid Metaheuristic for Multiple Runways Aircraft Landing Problem Based on Bat Algorithm. J. Appl. Math. 2013, 2013, 742653. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Zhou, D.; Yang, Z.; Huang, J.; Zhang, K.; Pan, Q. UAV route evaluation algorithm based on CSA-AHP and TOPSIS. In Proceedings of the 2017 IEEE International Conference on Information and Automation (ICIA), Macau, China, 18–20 July 2017; pp. 914–915. [Google Scholar] [CrossRef]
- El Gmili; Mjahed; El Kari; Ayad Particle Swarm Optimization and Cuckoo Search-Based Approaches for Quadrotor Control and Trajectory Tracking. Appl. Sci. 2019, 9, 1719. [CrossRef] [Green Version]
- Hu, H.; Wu, Y.; Xu, J.; Sun, Q. Cuckoo search-based method for trajectory planning of quadrotor in an urban environment. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 4571–4582. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, J.; Xin, B.; Fang, H. Online Path Planning for UAV Using an Improved Differential Evolution Algorithm. IFAC Proc. Vol. 2011, 44, 6349–6354. [Google Scholar] [CrossRef]
- Nikolos, I.K.; Brintaki, A.N. Coordinated UAV Path Planning Using Differential Evolution. In Proceedings of the 2005 IEEE International Symposium on, Mediterrean Conference on Control and Automation Intelligent Control, Limassol, Cyprus, 27–29 June 2005; pp. 549–556. [Google Scholar] [CrossRef]
- Alihodzic, A. Fireworks Algorithm with New Feasibility-Rules in Solving UAV Path Planning. In Proceedings of the 2016 3rd International Conference on Soft Computing & Machine Intelligence (ISCMI), Dubai, United Arab Emirates, 23–25 November 2016; pp. 53–57. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, X. UAV Path Planning Based on Hybrid Differential Evolution with Fireworks Algorithm. In International Conference on Sensing and Imaging: ICSI 2022: Advances in Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2022; pp. 354–364. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M. Parallel Hybrid 2-Opt Flower Pollination Algorithm for Real-Time UAV Trajectory Planning on GPU. ITM Web Conf. 2022, 48, 03007. [Google Scholar] [CrossRef]
- Li, P.; Duan, H. Path planning of unmanned aerial vehicle based on improved gravitational search algorithm. Sci. China Technol. Sci. 2012, 55, 2712–2719. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhang, J.; Zhong, M. A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning. Knowl-Based Syst. 2020, 194, 105530. [Google Scholar] [CrossRef]
- Luo, Y.; Lu, J.; Zhang, Y.; Zheng, K.; Qin, Q.; He, L.; Liu, Y. Near-Ground Delivery Drones Path Planning Design Based on BOA-TSAR Algorithm. Drones 2022, 6, 393. [Google Scholar] [CrossRef]
- Khoufi, I.; Laouiti, A.; Adjih, C. A Survey of Recent Extended Variants of the Traveling Salesman and Vehicle Routing Problems for Unmanned Aerial Vehicles. Drones 2019, 3, 66. [Google Scholar] [CrossRef] [Green Version]
- Chung, S.H.; Sah, B.; Lee, J. Optimization for drone and drone-truck combined operations: A review of the state of the art and future directions. Comput. Oper. Res. 2020, 123, 105004. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Weng, Y.-Y.; Wu, R.-Y.; Zheng, Y.-J. Cooperative Truck–Drone Delivery Path Optimization under Urban Traffic Restriction. Drones 2023, 7, 59. [Google Scholar] [CrossRef]
- Ilango, H.S.; Ramanathan, R. A Performance Study of Bio-Inspired Algorithms in Autonomous Landing of Unmanned Aerial Vehicle. Procedia Comput. Sci. 2020, 171, 1449–1458. [Google Scholar] [CrossRef]
- Liang, S.; Song, B.; Xue, D. Landing route planning method for micro drones based on hybrid optimization algorithm. Biomim. Intell. Robot. 2021, 1, 100003. [Google Scholar] [CrossRef]
- Mahmud, A.A.A.; Satakshi; Jeberson, W. Aircraft Landing Scheduling Using Embedded Flower Pollination Algorithm. Int. J. Parallel Program. 2020, 48, 771–785. [Google Scholar] [CrossRef]
- Zhou, G.; Wang, R.; Zhou, Y. Flower pollination algorithm with runway balance strategy for the aircraft landing scheduling problem. Cluster Comput. 2018, 21, 1543–1560. [Google Scholar] [CrossRef]
- Teimoori, M.; Taghizadeh, H.; Pourmahmoud, J.; Honarmand Azimi, M. A multi-objective grey wolf optimization algorithm for aircraft landing problem. J. Appl. Res. Ind. Eng. 2021, 8, 386–398. [Google Scholar] [CrossRef]
- Abdullah, O.S.; Abdullah, S.; Sarim, H.M. Harmony search algorithm for the multiple runways aircraft landing scheduling problem. J. Telecommun. Electron. Comput. Eng. 2017, 9, 59–65. [Google Scholar]
- Abdul-Razaq, T.S.; Ali, F.H. Hybrid Bees Algorithm to Solve Aircraft Landing Problem. J. Zankoy Sulaimani—Part A 2014, 17, 71–90. [Google Scholar] [CrossRef]
- Jia, X.; Cao, X.; Guo, Y.; Qiao, H.; Zhang, J. Scheduling Aircraft Landing Based on Clonal Selection Algorithm and Receding Horizon Control. In Proceedings of the 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 357–362. [Google Scholar] [CrossRef]
- Chai, R.; Savvaris, A.; Tsourdos, A.; Chai, S.; Xia, Y. A review of optimization techniques in spacecraft flight trajectory design. Prog. Aerosp. Sci. 2019, 109, 100543. [Google Scholar] [CrossRef]
- Li, S.; Huang, X.; Yang, B. Review of optimization methodologies in global and China trajectory optimization competitions. Prog. Aerosp. Sci. 2018, 102, 60–75. [Google Scholar] [CrossRef]
- Shirazi, A.; Ceberio, J.; Lozano, J.A. Spacecraft trajectory optimization: A review of models, objectives, approaches and solutions. Prog. Aerosp. Sci. 2018, 102, 76–98. [Google Scholar] [CrossRef] [Green Version]
- Su, Z.; Wang, H. A novel robust hybrid gravitational search algorithm for reusable launch vehicle approach and landing trajectory optimization. Neurocomputing 2015, 162, 116–127. [Google Scholar] [CrossRef]
- Panteleev, A.V.; Kryuchkov, A.Y. Application of Modified Fireworks Algorithm for Multiobjective Optimization of Satellite Control Law. In Advances in Theory and Practice of Computational Mechanics; Springer: Berlin/Heidelberg, Germany, 2020; pp. 333–349. [Google Scholar] [CrossRef]
- Xue, J.-J.; Wang, Y.; Li, H.; Xiao, J. Discrete Fireworks Algorithm for Aircraft Mission Planning. In International Conference on Swarm Intelligence: ICSI 2016: Advances in Swarm Intelligence; Springer: Berlin/Heidelberg, Germany, 2016; pp. 544–551. [Google Scholar] [CrossRef]
- Dastgerdi, K.; Mehrshad, N.; Farshad, M. A new intelligent approach for air traffic control using gravitational search algorithm. Sadhana 2016, 41, 183–191. [Google Scholar] [CrossRef]
- Cai, Z.; Lou, J.; Zhao, J.; Wu, K.; Liu, N.; Wang, Y.X. Quadrotor trajectory tracking and obstacle avoidance by chaotic grey wolf optimization-based active disturbance rejection control. Mech. Syst. Signal Process. 2019, 128, 636–654. [Google Scholar] [CrossRef]
- Xiao, L.; Xu, M.; Chen, Y.; Chen, Y. Hybrid Grey Wolf Optimization Nonlinear Model Predictive Control for Aircraft Engines Based on an Elastic BP Neural Network. Appl. Sci. 2019, 9, 1254. [Google Scholar] [CrossRef] [Green Version]
- Katal, N.; Kumar, P.; Narayan, S. Design of PIλDμ controller for robust flight control of a UAV using multi-objective bat algorithm. In Proceedings of the 2015 2nd International Conference on Recent Advances in Engineering & Computational Sciences (RAECS), Chandigarh, India, 21–22 December 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Lin, F.; Wang, X.; Qu, X. PID parameters tuning of UAV flight control system based on artificial bee colony algorithm. In 2015 2nd International Conference on Electrical, Computer Engineering and Electronics; Atlantis Press: Amsterdam, The Netherlands, 2015. [Google Scholar] [CrossRef] [Green Version]
- Bian, Q.; Nener, B.; Wang, X. A modified bacterial-foraging tuning algorithm for multimodal optimization of the flight control system. Aerosp. Sci. Technol. 2019, 93, 105274. [Google Scholar] [CrossRef]
- Oyekan, J.; Hu, H. A novel bacterial foraging algorithm for automated tuning of PID controllers of UAVs. In Proceedings of the The 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 693–698. [Google Scholar] [CrossRef]
- Bencharef, S.; Boubertakh, H. Optimal tuning of a PD control by bat algorithm to stabilize a quadrotor. In Proceedings of the 8th International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2016. [Google Scholar] [CrossRef]
- Zaeri, R.; Ghanbarzadeh, A.; Attaran, B.; Zaeri, Z. Fuzzy Logic Controller based pitch control of aircraft tuned with Bees Algorithm. In Proceedings of the The 2nd International Conference on Control, Instrumentation and Automation, Shiraz, Iran, 27–29 December 2011; pp. 705–710. [Google Scholar] [CrossRef]
- Huang, Y.; Fei, Q. Clonal selection algorithm based optimization of the ADRC parameters designed to control UAV longitudinal channel. In Proceedings of the 2015 IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 27–29 November 2015; pp. 448–452. [Google Scholar] [CrossRef]
- Zatout, M.S.; Rezoug, A.; Rezoug, A.; Baizid, K.; Iqbal, J. Optimisation of fuzzy logic quadrotor attitude controller—Particle swarm, cuckoo search and BAT algorithms. Int. J. Syst. Sci. 2022, 53, 883–908. [Google Scholar] [CrossRef]
- Glida, H.E.; Abdou, L.; Chelihi, A.; Sentouh, C.; Hasseni, S.-E.-I. Optimal model-free backstepping control for a quadrotor helicopter. Nonlinear Dyn. 2020, 100, 3449–3468. [Google Scholar] [CrossRef]
- Pedro, J.O.; Dangor, M.; Kala, P.J. Differential evolution-based PID control of a quadrotor system for hovering application. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 2791–2798. [Google Scholar] [CrossRef]
- Wang, W.; Yuan, X.; Zhu, J. Automatic PID tuning via differential evolution for quadrotor UAVs trajectory tracking. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016; pp. 1–8. [Google Scholar]
- Keskin, B.; Keskin, K. Position Control of Quadrotor using Firefly Algorithm. El-Cezeri 2021, 9, 554–566. [Google Scholar] [CrossRef]
- Kaba, A. Improved PID rate control of a quadrotor with a convexity-based surrogated model. Aircr. Eng. Aerosp. Technol. 2021, 93, 1287–1301. [Google Scholar] [CrossRef]
- Ebrahimkhani, E.; Dehghani, H.; Asadollahi, M.; Ghiasi, A.R. Controlling a Micro Quadrotor Using Nonlinear Techniques Tuned by Firefly Algorithm (FA). IN Int. Conf. New Res. Electr. Eng. Comput. Sci. 2015, 1–11. [Google Scholar] [CrossRef]
- Prabaningtyas, S. Mardlijah LQGT Control Design Based on Firefly Algorithm optimization for Trajectory Tracking on Quadcopter. In Proceedings of the 2022 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 20–21 July 2022; pp. 261–266. [Google Scholar] [CrossRef]
- Yin, X.; Wei, X.; Liu, L.; Wang, Y. Improved Hybrid Fireworks Algorithm-Based Parameter Optimization in High-Order Sliding Mode Control of Hypersonic Vehicles. Complexity 2018, 2018, 9098151. [Google Scholar] [CrossRef] [Green Version]
- Glida, H.-E.; Abdou, L.; Chelihi, A. Optimal Fuzzy Adaptive Backstepping Controller for Attitude Control of a Quadrotor Helicopter. In Proceedings of the 2019 International Conference on Control, Automation and Diagnosis (ICCAD), Grenoble, France, 2–4 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Basri, M.A.; Noordin, A. Optimal backstepping control of quadrotor UAV using gravitational search optimization algorithm. Bull. Electr. Eng. Inform. 2020, 9, 1819–1826. [Google Scholar] [CrossRef]
- Abbas, N.H.; Sami, A.R. Tuning of PID Controllers for Quadcopter System using Hybrid Memory based Gravitational Search Algorithm-Particle Swarm Optimization. Int. J. Comput. Appl. 2017, 172, 975–8887. [Google Scholar]
- Hartawan, W. Otomasi Pid Tuning Untuk Optimasi Kontrol Quadcopter Menggunakan Metode Harmony Search. J. Inov. Tek. Inform. 2021, 4, 21–28. Available online: http://journal.universitaspahlawan.ac.id/index.php/jiti/article/view/2012 (accessed on 20 June 2023).
- Altan, A. Performance of Metaheuristic Optimization Algorithms based on Swarm Intelligence in Attitude and Altitude Control of Unmanned Aerial Vehicle for Path Following. In Proceedings of the 2020 4th International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Istanbul, Turkey, 22–24 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Yuan, G.; Duan, H. Robust Control for UAV Close Formation Using LADRC via Sine-Powered Pigeon-Inspired Optimization. Drones 2023, 7, 238. [Google Scholar] [CrossRef]
- Jing, Y.; Wang, X.; Heredia-Juesas, J.; Fortner, C.; Giacomo, C.; Sipahi, R.; Martinez-Lorenzo, J. PX4 Simulation Results of a Quadcopter with a Disturbance-Observer-Based and PSO-Optimized Sliding Mode Surface Controller. Drones 2022, 6, 261. [Google Scholar] [CrossRef]
- Shafieenejad, I.; Rouzi, E.D.; Sardari, J.; Araghi, M.S.; Esmaeili, A.; Zahedi, S. Fuzzy logic, neural-fuzzy network and honey bees algorithm to develop the swarm motion of aerial robots. Evol. Syst. 2022, 13, 319–330. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, X.; Liu, S.; Deng, X. Adaptive Differential Evolution-based Receding Horizon Control Design for Multi-UAV Formation Reconfiguration. Int. J. Control. Autom. Syst. 2019, 17, 3009–3020. [Google Scholar] [CrossRef]
- Bian, L.; Sun, W.; Sun, T. Trajectory Following and Improved Differential Evolution Solution for Rapid Forming of UAV Formation. IEEE Access 2019, 7, 169599–169613. [Google Scholar] [CrossRef]
- WANG, Y.; ZHANG, T.; CAI, Z.; ZHAO, J.; WU, K. Multi-UAV coordination control by chaotic grey wolf optimization based distributed MPC with event-triggered strategy. Chin. J. Aeronaut. 2020, 33, 2877–2897. [Google Scholar] [CrossRef]
- Ma, M.; Wu, J.; Shi, Y.; Yue, L.; Yang, C.; Chen, X. Chaotic Random Opposition-Based Learning and Cauchy Mutation Improved Moth-Flame Optimization Algorithm for Intelligent Route Planning of Multiple UAVs. IEEE Access 2022, 10, 49385–49397. [Google Scholar] [CrossRef]
- Xiong, T.; Liu, F.; Liu, H.; Ge, J.; Li, H.; Ding, K.; Li, Q. Multi-Drone Optimal Mission Assignment and 3D Path Planning for Disaster Rescue. Drones 2023, 7, 394. [Google Scholar] [CrossRef]
- Qiu, H.; Duan, H. A multi-objective pigeon-inspired optimization approach to UAV distributed flocking among obstacles. Inf. Sci. 2020, 509, 515–529. [Google Scholar] [CrossRef]
- Ali, Z.A.; Zhangang, H.; Zhengru, D. Path planning of multiple UAVs using MMACO and DE algorithm in dynamic environment. Meas. Control 2023, 56, 459–469. [Google Scholar] [CrossRef]
- Wu, J.; Yi, J.; Gao, L.; Li, X. Cooperative path planning of multiple UAVs based on PH curves and harmony search algorithm. In Proceedings of the 2017 IEEE 21st International Conference on Computer Supported Cooperative Work in Design (CSCWD), Wellington, New Zealand, 26–28 April 2017; pp. 540–544. [Google Scholar] [CrossRef]
- Yu, J.; Guo, J.; Zhang, X.; Zhou, C.; Xie, T.; Han, X. A Novel Tent-Levy Fireworks Algorithm for the UAV Task Allocation Problem Under Uncertain Environment. IEEE Access 2022, 10, 102373–102385. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, X. Research on UAV Task Assignment Based on Fireworks Algorithm. Acad. J. Comput. Inf. Sci. 2022, 5, 103–107. [Google Scholar] [CrossRef]
- Cui, Y.; Dong, W.; Hu, D.; Liu, H. The Application of Improved Harmony Search Algorithm to Multi-UAV Task Assignment. Electronics 2022, 11, 1171. [Google Scholar] [CrossRef]
- Xiang, H.; Han, Y.; Pan, N.; Zhang, M.; Wang, Z. Study on Multi-UAV Cooperative Path Planning for Complex Patrol Tasks in Large Cities. Drones 2023, 7, 367. [Google Scholar] [CrossRef]
- Zarchi, M.; Attaran, B. Performance improvement of an active vibration absorber subsystem for an aircraft model using a bees algorithm based on multi-objective intelligent optimization. Eng. Optim. 2017, 49, 1905–1921. [Google Scholar] [CrossRef]
- RezaToloei, A.; Zarchi, M.; Attaran, B. Application of Active Suspension System to Reduce Aircraft Vibration using PID Technique and Bees Algorithm. Int. J. Comput. Appl. 2014, 98, 17–24. [Google Scholar] [CrossRef]
- Ding, L.; Wu, H.; Yao, Y. Chaotic Artificial Bee Colony Algorithm for System Identification of a Small-Scale Unmanned Helicopter. Int. J. Aerosp. Eng. 2015, 2015, 801874. [Google Scholar] [CrossRef] [Green Version]
- Ghosh Roy, A.; Peyada, N.K. Aircraft parameter estimation using Hybrid Neuro Fuzzy and Artificial Bee Colony optimization (HNFABC) algorithm. Aerosp. Sci. Technol. 2017, 71, 772–782. [Google Scholar] [CrossRef]
- Gotmare, A.; Bhattacharjee, S.S.; Patidar, R.; George, N.V. Swarm and evolutionary computing algorithms for system identification and filter design: A comprehensive review. Swarm Evol. Comput. 2017, 32, 68–84. [Google Scholar] [CrossRef]
- El Gmili, N.; Mjahed, M.; El Kari, A.; Ayad, H. Quadrotor Identification through the Cooperative Particle Swarm Optimization-Cuckoo Search Approach. Comput. Intell. Neurosci. 2019, 2019, 8925165. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, J.; Cai, Z.; Lin, Q.; Zhang, D.; Wang, Y. System identification of quadrotor UAV based on genetic algorithm. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 2336–2340. [Google Scholar] [CrossRef]
- Wang, S.; Guo, H.; Li, W.; Dong, F.; Bu, L. Differential evolution parameter identification of multi-rotor unmanned aerial vehicle (UAV) based on gradient prey acceleration strategy. Int. J. Simul. Syst. Sci. Technol. 2016, 17, 5.1–5.6. [Google Scholar] [CrossRef]
- Tijani, I.B.; Akmeliawati, R.; Legowo, A.; Budiyono, A. Nonlinear identification of a small scale unmanned helicopter using optimized NARX network with multiobjective differential evolution. Eng. Appl. Artif. Intell. 2014, 33, 99–115. [Google Scholar] [CrossRef]
- Nonut, A.; Kanokmedhakul, Y.; Bureerat, S.; Kumar, S.; Tejani, G.G.; Artrit, P.; Yıldız, A.R.; Pholdee, N. A small fixed-wing UAV system identification using metaheuristics. Cogent Eng. 2022, 9, 2114196. [Google Scholar] [CrossRef]
- Li, J.; Duan, H. Boid-Inspired Harmony Search approach to aircraft parameter estimation. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 3556–3561. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Wang, G.; Zhu, J. Frequency-domain identification of a small-scale unmanned helicopter with harmony search algorithm. Int. J. Comput. Appl. Technol. 2014, 49, 141. [Google Scholar] [CrossRef]
- Samarakoon, S.M.B.P.; Muthugala, M.A.V.J.; Elara, M.R. Metaheuristic based navigation of a reconfigurable robot through narrow spaces with shape changing ability. Expert Syst. Appl. 2022, 201, 117060. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, W. Efficient UAV Localization Based on Modified Particle Swarm Optimization. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 1089–1094. [Google Scholar] [CrossRef]
- Shanshan, G.; Zhong, Y.; Weina, C.; Yizhi, W. Artificial Bee Colony Particle Filtering Algorithm for Integrated Navigation. In Advances in Guidance, Navigation and Control: Proceedings of the 2020 International Conference on Guidance, Navigation and Control, ICGNC 2020, Tianjin, China, 23–25 October 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 3797–3806. [Google Scholar] [CrossRef]
- Duan, H. Biological Vision-Based Surveillance and Navigation. In Bio-Inspired Computation in Unmanned Aerial Vehicles; Springer: Berlin/Heidelberg, Germany, 2014; pp. 215–246. [Google Scholar] [CrossRef]
- Shrivastava, A. AGV Using Clonal Selection in Warehouse; Galgotias College of Engineering and Technology: Uttar Pradesh, India, 2021. [Google Scholar]
- Banerjee, A.; Nilhani, A.; Dhabal, S.; Venkateswaran, P. A novel sound source localization method using a global-best guided cuckoo search algorithm for drone-based search and rescue operations. In Unmanned Aerial Systems; Elsevier: Amsterdam, The Netherlands, 2021; pp. 375–415. [Google Scholar] [CrossRef]
- Alfeo, A.L.; Cimino, M.G.C.A.; De Francesco, N.; Lega, M.; Vaglini, G. Design and simulation of the emergent behavior of small drones swarming for distributed target localization. J. Comput. Sci. 2018, 29, 19–33. [Google Scholar] [CrossRef]
- Sun, Z.; Wu, J.; Yang, J.; Huang, Y.; Li, C.; Li, D. Path Planning for GEO-UAV Bistatic SAR Using Constrained Adaptive Multiobjective Differential Evolution. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6444–6457. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Bio-Inspired Approaches for Energy-Efficient Localization and Clustering in UAV Networks for Monitoring Wildfires in Remote Areas. IEEE Access 2021, 9, 18649–18669. [Google Scholar] [CrossRef]
- Radmanesh, M.; Kumar, M. Grey wolf optimization based sense and avoid algorithm for UAV path planning in uncertain environment using a Bayesian framework. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 68–76. [Google Scholar] [CrossRef]
- Nenavath, H.; Ashwini, K.; Jatoth, R.K.; Mirjalili, S. Intelligent Trigonometric Particle Filter for visual tracking. ISA Trans. 2022, 128, 460–476. [Google Scholar] [CrossRef]
- Hao, L.; Xiangyu, F.; Manhong, S. Research on the Cooperative Passive Location of Moving Targets Based on Improved Particle Swarm Optimization. Drones 2023, 7, 264. [Google Scholar] [CrossRef]
- Li, Z.; Deng, Y.; Liu, W. Identification of INS Sensor Errors from Navigation Data Based on Improved Pigeon-Inspired Optimization. Drones 2022, 6, 287. [Google Scholar] [CrossRef]
- Egi, Y.; Otero, C.E. Machine-Learning and 3D Point-Cloud Based Signal Power Path Loss Model for the Deployment of Wireless Communication Systems. IEEE Access 2019, 7, 42507–42517. [Google Scholar] [CrossRef]
- Bithas, P.S.; Michailidis, E.T.; Nomikos, N.; Vouyioukas, D.; Kanatas, A.G. A Survey on Machine-Learning Techniques for UAV-Based Communications. Sensors 2019, 19, 5170. [Google Scholar] [CrossRef] [Green Version]
- Khoufi, I.; Laouiti, A.; Adjih, C.; Hadded, M. UAVs Trajectory Optimization for Data Pick Up and Delivery with Time Window. Drones 2021, 5, 27. [Google Scholar] [CrossRef]
- Eledlebi, K.; Hildmann, H.; Ruta, D.; Isakovic, A.F. A Hybrid Voronoi Tessellation/Genetic Algorithm Approach for the Deployment of Drone-Based Nodes of a Self-Organizing Wireless Sensor Network (WSN) in Unknown and GPS Denied Environments. Drones 2020, 4, 33. [Google Scholar] [CrossRef]
- Subburaj, B.; Jayachandran, U.M.; Arumugham, V.; Suthanthira Amalraj, M.J.A. A Self-Adaptive Trajectory Optimization Algorithm Using Fuzzy Logic for Mobile Edge Computing System Assisted by Unmanned Aerial Vehicle. Drones 2023, 7, 266. [Google Scholar] [CrossRef]
- Anicho, O.; Charlesworth, P.B.; Baicher, G.S.; Nagar, A.; Buckley, N. Comparative study for coordinating multiple unmanned HAPS for communications area coverage. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems, ICUAS, Atlanta, GA, USA, 11–14 June 2019; pp. 467–474. [Google Scholar] [CrossRef]
- Du, W.; Ying, W.; Yang, P.; Cao, X.; Yan, G.; Tang, K.; Wu, D. Network-Based Heterogeneous Particle Swarm Optimization and Its Application in UAV Communication Coverage. In IEEE Transactions on Emerging Topics in Computational Intelligence; IEEE: New York, NY, USA, 2020; Volume 4, pp. 312–323. [Google Scholar] [CrossRef]
- Torky, M.; El-Dosuky, M.; Goda, E.; Snášel, V.; Hassanien, A.E. Scheduling and Securing Drone Charging System Using Particle Swarm Optimization and Blockchain Technology. Drones 2022, 6, 237. [Google Scholar] [CrossRef]
- Trotta, A.; Andreagiovanni, F.D.; Di Felice, M.; Natalizio, E.; Chowdhury, K.R. When UAVs Ride A Bus: Towards Energy-efficient City-scale Video Surveillance. In Proceedings of the IEEE INFOCOM 2018—IEEE Conference on Computer Communications, Honolulu, HI, USA, 16–19 April 2018; Volume 2018-April, pp. 1043–1051. [Google Scholar] [CrossRef]
- Li, L.; Xu, Y.; Zhang, Z.; Yin, J.; Chen, W.; Han, Z. A prediction-based charging policy and interference mitigation approach in the wireless powered internet of things. IEEE J. Sel. Areas Commun. 2018, 37, 439–451. [Google Scholar] [CrossRef]
- Xie, J.; Fu, Q.; Jia, R.; Lin, F.; Li, M.; Zheng, Z. Optimal Energy and Delay Tradeoff in UAV-Enabled Wireless Sensor Networks. Drones 2023, 7, 368. [Google Scholar] [CrossRef]
- Zhang, X.; Xiang, X.; Lu, S.; Zhou, Y.; Sun, S. Evolutionary Optimization of Drone-Swarm Deployment for Wireless Coverage. Drones 2022, 7, 8. [Google Scholar] [CrossRef]
- Mukherjee, A.; Fakoorian, S.A.A.; Huang, J.; Swindlehurst, A.L. Principles of physical layer security in multiuser wireless networks: A survey. IEEE Commun. Surv. Tutorials 2014, 16, 1550–1573. [Google Scholar] [CrossRef] [Green Version]
- Li, B.; Fei, Z.; Zhang, Y.; Guizani, M. Secure UAV communication networks over 5G. IEEE Wirel. Commun. 2019, 26, 114–120. [Google Scholar] [CrossRef]
- Bassily, R.; Ekrem, E.; He, X.; Tekin, E.; Xie, J.; Bloch, M.R.; Ulukus, S.; Yener, A. Cooperative security at the physical layer: A summary of recent advances. IEEE Signal Process. Mag. 2013, 30, 16–28. [Google Scholar] [CrossRef]
- Beegum, T.R.; Idris, M.Y.I.; Bin Ayub, M.N.; Shehadeh, H.A. Optimized Routing of UAVs Using Bio-Inspired Algorithm in FANET: A Systematic Review. IEEE Access 2023, 11, 15588–15622. [Google Scholar] [CrossRef]
- Abubakar, A.I.; Ahmad, I.; Omeke, K.G.; Ozturk, M.; Ozturk, C.; Abdel-Salam, A.M.; Mollel, M.S.; Abbasi, Q.H.; Hussain, S.; Imran, M.A. A Survey on Energy Optimization Techniques in UAV-Based Cellular Networks: From Conventional to Machine Learning Approaches. Drones 2023, 7, 214. [Google Scholar] [CrossRef]











































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
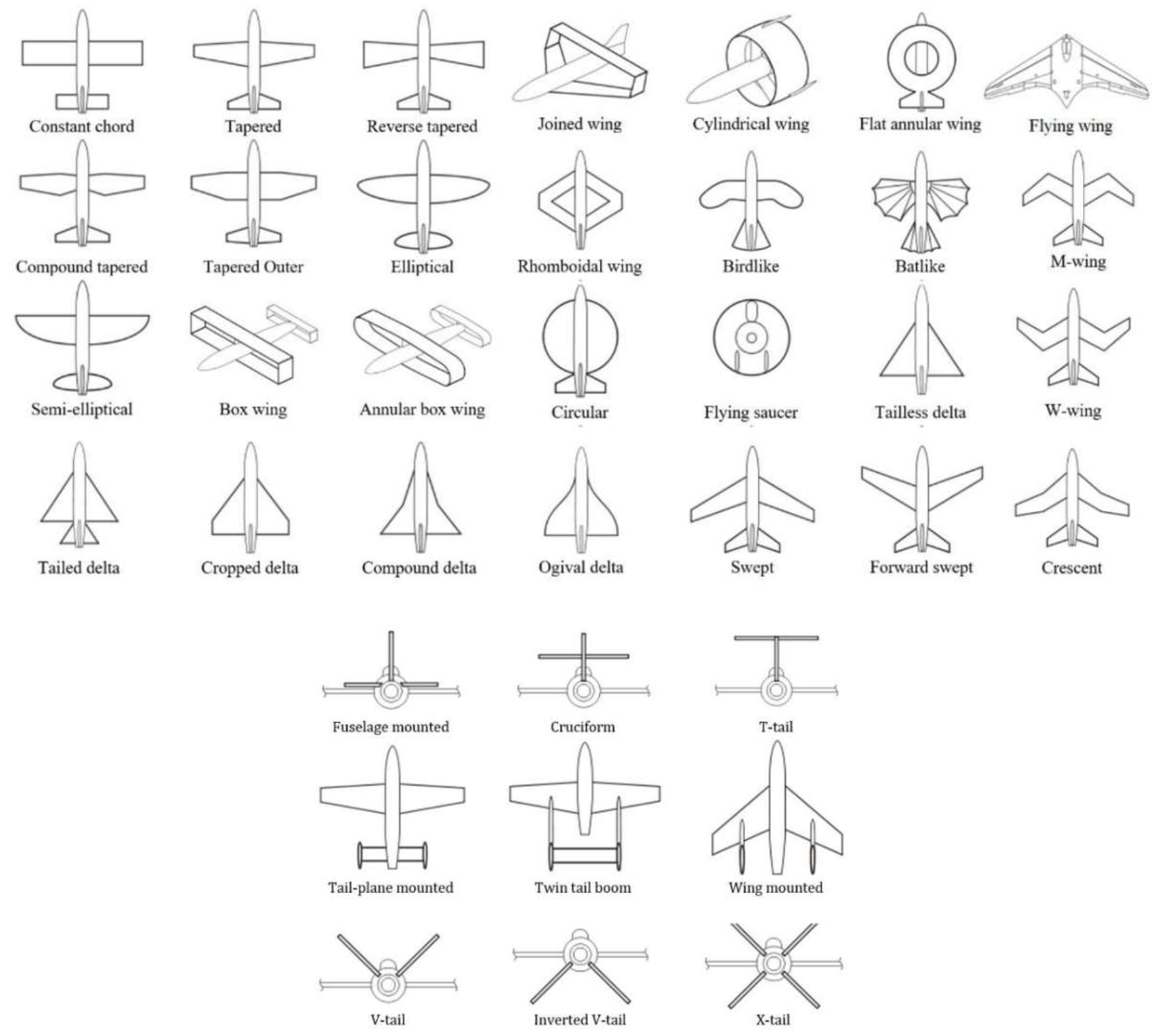{kind=link}
{kind=link}
{kind=link}
| Function | Formula |
|---|---|
| DE/rand/1 | |
| DE/best/1 | |
| DE/rand/2 | |
| DE/best/2 | |
| DE/current-to-best/1 | |
| DE/current-to-rand/1 |
| Function | Continuity | Differentiability | Separability | Scalability | Modality |
|---|---|---|---|---|---|
| Ackley | Continuous | Differentiable | Non-separable | Scalable | Multimodal |
| Alpine | Continuous | Non-differentiable | Separable | Scalable | Multimodal |
| Chung Reynolds | Continuous | Differentiable | Partially Separable | Scalable | Unimodal |
| Cosine Mixture | Discontinuous | Non-differentiable | Separable | Scalable | Multimodal |
| Dixon & Price | Continuous | Differentiable | Non-separable | Scalable | Unimodal |
| Griewank | Continuous | Differentiable | Non-separable | Scalable | Multimodal |
| Pint´er | Continuous | Differentiable | Non-separable | Scalable | Multimodal |
| Powell | Continuous | Differentiable | Non-separable | Scalable | Unimodal |
| Qing | Continuous | Differentiable | Separable | Scalable | Multimodal |
| Scahffer | Continuous | Differentiable | Non-separable | Non-scalable | Unimodal |
| Function | Equation | Plot |
|---|---|---|
| Ackley |  | |
| Alpine |  | |
| Chung Reynolds |  | |
| Cosine Mixture |  | |
| Dixon and Price |  | |
| Griewank |  | |
| Pint´er | |  |
| Powell |  | |
| Qing |  | |
| Scahffer |  |
| Algorithm | Problem | Mean Cost | Mean Iterations | Mean Time (s) | Mean Error |
|---|---|---|---|---|---|
| Sine Cosine Algorithm | Ackley | 5.34 × 10−5 | 339.482 | 5.50 × 10−1 | 1.07 × 10−7 |
| Harris Hawks Optimization | 6.14 × 105 × 10−5 | 35.086 | 1.02 × 10−1 | 1.23 × 10−7 | |
| Fireworks Algorithm | 6.27 × 10−5 | 88.314 | 5.48 × 10−1 | 1.25 × 10−7 | |
| Artificial Bee Colony Algorithm | 7.28 × 10−5 | 91.194 | 1.52 × 10−1 | 1.46 × 10−7 | |
| Bees Algorithm | 7.75 × 10−5 | 140.83 | 7.29 × 10−1 | 1.55 × 10−7 | |
| Gravitational Search Algorithm | 7.92 × 10−5 | 422.2 | 7.17 × 10−1 | 1.58 × 10−7 | |
| Firefly Algorithm | 7.93 × 10−5 | 341.84 | 5.71 | 1.59 × 10−7 | |
| Differential Evolution | 7.96 × 10−5 | 217.234 | 9.90 × 10−1 | 1.59 × 10−7 | |
| Bat Algorithm | 7.99 × 10−5 | 294.708 | 2.70 × 10−1 | 1.60 × 10−7 | |
| Grey Wolf Optimizer | 8.00 × 10−5 | 28.902 | 8.20 × 10−2 | 1.60 × 10−7 | |
| Flower Pollination Algorithm | 8.13 × 10−5 | 841.306 | 1.32 | 1.63 × 10−7 | |
| Cuckoo Search | 8.19 × 10−5 | 312.4 | 4.94 × 10−1 | 1.64 × 10−7 | |
| Particle Swarm Algorithm | 8.27 × 10−5 | 227.056 | 5.03 × 10−1 | 1.65 × 10−7 | |
| Cat Swarm Optimization | 9.30 × 10−5 | 48.064 | 1.91 × 10−1 | 1.86 × 10−7 | |
| Clonal Selection Algorithm | 6.12 × 10−4 | 1000 | 1.67 | 1.22 × 10−6 | |
| Fish School Search | 3.78 × 10−3 | 1000 | 2.46 | 7.56 × 10−6 | |
| Moth Flame Optimizer | 4.06 × 10−3 | 531.462 | 5.47 × 10−1 | 8.12 × 10−6 | |
| Forest Optimization Algorithm | 3.54 × 10−2 | 1000 | 1.00 | 7.09 × 10−5 | |
| Bacterial Foraging Optimization | 6.83 × 10−2 | 1000 | 5.61 | 1.37 × 10−4 | |
| Genetic Algorithm | 2.46 × 10−1 | 1000 | 4.77 × 10−1 | 2.46 × 10−2 | |
| Harmony Search | 3.49 × 10−1 | 1000 | 1.36 × 10−1 | 6.98 × 10−4 | |
| Fireworks Algorithm | Alpine | 6.64 × 10−5 | 133.906 | 5.94 × 10−1 | 1.33 × 10−7 |
| Harris Hawks Optimization | 7.00 × 10−5 | 27.042 | 6.11 × 10−2 | 1.40 × 10−7 | |
| Bees Algorithm | 7.13 × 10−5 | 135.848 | 5.09 × 10−1 | 1.43 × 10−7 | |
| Artificial Bee Colony Algorithm | 7.50 × 10−5 | 84.648 | 1.25 × 10−1 | 1.50 × 10−7 | |
| Gravitational Search Algorithm | 8.00 × 10−5 | 310.83 | 7.94 × 10−1 | 1.60 × 10−7 | |
| Particle Swarm Algorithm | 8.06 × 10−5 | 250.622 | 3.37 × 10−1 | 1.61 × 10−7 | |
| Firefly Algorithm | 8.06 × 10−5 | 260.928 | 3.98 | 1.61 × 10−7 | |
| Grey Wolf Optimizer | 8.47 × 10−5 | 145.878 | 3.23 × 10−1 | 1.69 × 10−7 | |
| Cat Swarm Optimization | 9.32 × 10−5 | 91.69 | 2.67 × 10−1 | 1.86 × 10−7 | |
| Differential Evolution | 1.68 × 10−4 | 315.536 | 9.93 × 10−1 | 3.37 × 10−7 | |
| Cuckoo Search | 4.82 × 10−4 | 932.264 | 7.28 × 10−1 | 9.64 × 10−7 | |
| Fish School Search | 1.13 × 10−3 | 999.994 | 2.21 | 2.26 × 10−6 | |
| Moth Flame Optimizer | 2.32 × 10−3 | 548.076 | 6.47 × 10−1 | 4.64 × 10−6 | |
| Sine Cosine Algorithm | 2.56 × 10−3 | 340.892 | 2.62 × 10−1 | 5.12 × 10−6 | |
| Bat Algorithm | 4.91 × 10−3 | 768.372 | 7.83 × 10−1 | 9.81 × 10−6 | |
| Harmony Search | 1.37 × 10−2 | 1000 | 1.17 × 10−1 | 2.74 × 10−5 | |
| Flower Pollination Algorithm | 1.62 × 10−2 | 1000 | 1.31 | 3.24 × 10−5 | |
| Forest Optimization Algorithm | 4.01 × 10−2 | 1000 | 6.14 × 10−1 | 8.02 × 10−5 | |
| Bacterial Foraging Optimization | 4.16 × 10−2 | 1000 | 4.07 | 8.33 × 10−5 | |
| Genetic Algorithm | 5.24 × 10−2 | 1000 | 2.21 × 10−1 | 5.24 × 10−3 | |
| Clonal Selection Algorithm | 7.96 × 10−1 | 1000 | 1.05 | 1.59 × 10−3 | |
| Sine Cosine Algorithm | Chung-Reynolds | 2.39 × 10−5 | 146.724 | 1.20 × 10−1 | 4.78 × 10−8 |
| Fireworks Algorithm | 3.05 × 10−5 | 43.376 | 1.95 × 10−1 | 6.09 × 10−8 | |
| Artificial Bee Colony Algorithm | 4.16 × 10−5 | 14.254 | 2.88 × 10−2 | 8.33 × 10−8 | |
| Forest Optimization Algorithm | 4.65 × 10−5 | 171.568 | 6.75 × 10−2 | 9.30 × 10−8 | |
| Grey Wolf Optimizer | 4.68 × 10−5 | 9.834 | 1.59 × 10−2 | 9.36 × 10−8 | |
| Gravitational Search Algorithm | 4.76 × 10−5 | 114.352 | 4.45 × 10−1 | 9.51 × 10−8 | |
| Bees Algorithm | 4.82 × 10−5 | 16.916 | 8.23 × 10−2 | 9.65 × 10−8 | |
| Bat Algorithm | 4.83 × 10−5 | 45.57 | 5.10 × 10−2 | 9.67 × 10−8 | |
| Differential Evolution | 4.88 × 10−5 | 71.866 | 2.31 × 10−1 | 9.77 × 10−8 | |
| Firefly Algorithm | 4.94 × 10−5 | 91.87 | 1.11 | 9.87 × 10−8 | |
| Particle Swarm Algorithm | 5.07 × 10−5 | 47.766 | 5.38 × 10−2 | 1.01 × 10−7 | |
| Clonal Selection Algorithm | 5.08 × 10−5 | 44.366 | 7.50 × 10−2 | 1.02 × 10−7 | |
| Fish School Search | 5.14 × 10−5 | 314.832 | 5.99 × 10−1 | 1.03 × 10−7 | |
| Flower Pollination Algorithm | 5.15 × 10−5 | 203.686 | 2.58 × 10−1 | 1.03 × 10−7 | |
| Bacterial Foraging Optimization | 5.16 × 10−5 | 53.93 | 2.54 × 10−1 | 1.03 × 10−7 | |
| Cuckoo Search | 5.21 × 10−5 | 67.72 | 4.55 × 10−2 | 1.04 × 10−7 | |
| Moth Flame Optimizer | 7.05 × 10−5 | 228.232 | 2.14 × 10−1 | 1.41 × 10−7 | |
| Cat Swarm Optimization | 7.50 × 10−5 | 15.922 | 4.91 × 10−2 | 1.50 × 10−7 | |
| Genetic Algorithm | 1.82 × 10−4 | 843 | 2.57 × 10−1 | 1.82 × 10−5 | |
| Harris Hawks Optimization | 2.96 × 10−4 | 6.14 | 9.07 × 10−3 | 5.92 × 10−7 | |
| Harmony Search | 4.63 × 10−4 | 789.02 | 4.77 × 10−2 | 9.26 × 10−7 | |
| Sine Cosine Algorithm | Cosine Mixture | 3.73 × 10−5 | 201.704 | 1.89 × 10−1 | 7.47 × 10−8 |
| Fireworks Algorithm | 4.87 × 10−5 | 45.982 | 2.30 × 10−1 | 9.75 × 10−8 | |
| Clonal Selection Algorithm | 5.69 × 10−5 | 81.124 | 1.17 × 10−1 | 1.14 × 10−7 | |
| Artificial Bee Colony Algorithm | 5.84 × 10−5 | 28.978 | 3.28 × 10−2 | 1.17 × 10−7 | |
| Grey Wolf Optimizer | 6.37 × 10−5 | 13.644 | 3.38 × 10−2 | 1.27 × 10−7 | |
| Firefly Algorithm | 6.62 × 10−5 | 135.314 | 2.02 | 1.32 × 10−7 | |
| Bees Algorithm | 6.64 × 10−5 | 62.548 | 2.68 × 10−1 | 1.33 × 10−7 | |
| Differential Evolution | 6.70 × 10−5 | 104.8 | 3.73 × 10−1 | 1.34 × 10−7 | |
| Particle Swarm Algorithm | 6.80 × 10−5 | 77.204 | 1.10 × 10−1 | 1.36 × 10−7 | |
| Flower Pollination Algorithm | 6.83 × 10−5 | 464.014 | 5.65 × 10−1 | 1.37 × 10−7 | |
| Cuckoo Search | 6.83 × 10−5 | 130.344 | 1.24 × 10−1 | 1.37 × 10−7 | |
| Fish School Search | 7.71 × 10−5 | 993.258 | 2.66 | 1.54 × 10−7 | |
| Forest Optimization Algorithm | 8.33 × 10−5 | 622.266 | 2.97 × 10−1 | 1.67 × 10−7 | |
| Cat Swarm Optimization | 8.68 × 10−5 | 41.174 | 1.22 × 10−1 | 1.74 × 10−7 | |
| Harris Hawks Optimization | 1.09 × 10−4 | 8.736 | 2.20 × 10−2 | 2.19 × 10−7 | |
| Gravitational Search Algorithm | 2.56 × 10−4 | 240.778 | 5.91 × 10−1 | 5.13 × 10−7 | |
| Moth Flame Optimizer | 3.85 × 10−4 | 331.822 | 2.82 × 10−1 | 7.70 × 10−7 | |
| Genetic Algorithm | 1.49 × 10−3 | 1000 | 2.65 × 10−1 | 1.49 × 10−4 | |
| Bat Algorithm | 3.91 × 10−3 | 185.366 | 1.48 × 10−1 | 7.82 × 10−6 | |
| Harmony Search | 9.96 × 10−3 | 1000 | 8.87 × 10−2 | 1.99 × 10−5 | |
| Bacterial Foraging Optimization | 1.61 × 10−2 | 1000 | 4.04 | 3.23 × 10−5 | |
| Firefly Algorithm | Dixon-Price | 6.48 × 10−5 | 205.242 | 3.17 | 1.30 × 10−7 |
| Bat Algorithm | 6.60 × 10−5 | 158.698 | 1.25 × 10−1 | 1.32 × 10−7 | |
| Gravitational Search Algorithm | 6.66 × 10−5 | 229.648 | 9.72 × 10−1 | 1.33 × 10−7 | |
| Cuckoo Search | 6.88 × 10−5 | 224.77 | 2.32 × 10−1 | 1.38 × 10−7 | |
| Particle Swarm Algorithm | 7.12 × 10−5 | 171.6 | 2.15 × 10−1 | 1.42 × 10−7 | |
| Flower Pollination Algorithm | 7.19 × 10−5 | 743.12 | 9.05 × 10−1 | 1.44 × 10−7 | |
| Artificial Bee Colony Algorithm | 8.33 × 10−5 | 332.548 | 5.04 × 10−1 | 1.67 × 10−7 | |
| Fish School Search | 8.53 × 10−5 | 992.308 | 3.04 | 1.71 × 10−7 | |
| Harris Hawks Optimization | 1.06 × 10−4 | 208.448 | 5.15 × 10−1 | 2.12 × 10−7 | |
| Bees Algorithm | 9.22 × 10−4 | 120.12 | 6.29 × 10−1 | 1.84 × 10−6 | |
| Differential Evolution | 2.12 × 10−3 | 204.858 | 5.65 × 10−1 | 4.24 × 10−6 | |
| Cat Swarm Optimization | 1.08 × 10−2 | 1000 | 4.26 | 2.15 × 10−5 | |
| Bacterial Foraging Optimization | 1.54 × 10−2 | 1000 | 4.06 | 3.07 × 10−5 | |
| Forest Optimization Algorithm | 9.88 × 10−2 | 1000 | 8.36 × 10−1 | 1.98 × 10−4 | |
| Grey Wolf Optimizer | 1.25 × 10−1 | 1000 | 1.40 | 2.49 × 10−4 | |
| Sine Cosine Algorithm | 2.49 × 10−1 | 1000 | 9.62 × 10−1 | 4.98 × 10−4 | |
| Fireworks Algorithm | 4.95 × 10−1 | 1000 | 4.64 | 9.90 × 10−4 | |
| Harmony Search | 8.09 × 10−1 | 1000 | 1.22 × 10−1 | 1.62 × 10−3 | |
| Genetic Algorithm | 3.03 | 1000 | 2.80 × 10−1 | 3.03 × 10−1 | |
| Moth Flame Optimizer | 4.36 | 706.77 | 7.07 × 10−1 | 8.72 × 10−3 | |
| Clonal Selection Algorithm | 10.3 | 1000 | 2.25 | 2.05 × 10−2 | |
| Cat Swarm Optimization | Expanded Schaffer | 9.04 × 10−5 | 130.836 | 5.16 × 10−1 | 1.81 × 10−7 |
| Artificial Bee Colony Algorithm | 1.45 × 10−4 | 367.618 | 5.78 × 10−1 | 2.90 × 10−7 | |
| Fireworks Algorithm | 1.49 × 10−4 | 209.674 | 1.05 | 2.97 × 10−7 | |
| Harris Hawks Optimization | 1.50 × 10−4 | 27.364 | 5.30 × 10−2 | 3.00 × 10−7 | |
| Grey Wolf Optimizer | 2.21 × 10−4 | 262.478 | 3.97 × 10−1 | 4.43 × 10−7 | |
| Cuckoo Search | 3.86 × 10−4 | 509.374 | 5.12 × 10−1 | 7.72 × 10−7 | |
| Flower Pollination Algorithm | 6.49 × 10−4 | 894.716 | 1.54 | 1.30 × 10−6 | |
| Sine Cosine Algorithm | 1.78 × 10−3 | 510.884 | 4.51 × 10−1 | 3.56 × 10−6 | |
| Firefly Algorithm | 2.33 × 10−3 | 945.782 | 1.39 × 101 | 4.67 × 10−6 | |
| Particle Swarm Algorithm | 3.46 × 10−3 | 542.182 | 8.18 × 10−1 | 6.92 × 10−6 | |
| Bacterial Foraging Optimization | 4.09 × 10−3 | 974.946 | 5.85 | 8.19 × 10−6 | |
| Bees Algorithm | 4.29 × 10−3 | 775.36 | 3.53 | 8.58 × 10−6 | |
| Fish School Search | 5.77 × 10−3 | 697.276 | 1.59 | 1.15 × 10−5 | |
| Differential Evolution | 6.79 × 10−3 | 792.188 | 2.45 | 1.36 × 10−5 | |
| Clonal Selection Algorithm | 6.91 × 10−3 | 789.402 | 1.21 | 1.38 × 10−5 | |
| Moth Flame Optimizer | 8.75 × 10−3 | 982.44 | 6.91 × 10−1 | 1.75 × 10−5 | |
| Genetic Algorithm | 8.78 × 10−3 | 1000 | 3.88 × 10−1 | 8.78 × 10−4 | |
| Gravitational Search Algorithm | 8.89 × 10−3 | 998.088 | 1.37 | 1.78 × 10−5 | |
| Forest Optimization Algorithm | 9.06 × 10−3 | 960.018 | 6.72 × 10−1 | 1.81 × 10−5 | |
| Harmony Search | 9.58 × 10−3 | 978.92 | 8.91 × 10−2 | 1.92 × 10−5 | |
| Bat Algorithm | 2.40 × 10−2 | 988.604 | 8.10 × 10−1 | 4.79 × 10−5 | |
| Artificial Bee Colony Algorithm | Griewank | 4.42 × 10−5 | 127.17 | 9.13 × 10−1 | 8.84 × 10−8 |
| Fireworks Algorithm | 1.63 × 10−4 | 18.25 | 4.96 × 10−2 | 3.27 × 10−7 | |
| Harris Hawks Optimization | 3.23 × 10−4 | 773.19 | 9.98 × 10−1 | 6.45 × 10−7 | |
| Cuckoo Search | 6.61 × 10−4 | 384.45 | 6.14 × 10−1 | 1.32 × 10−6 | |
| Fish School Search | 1.22 × 10−3 | 887.88 | 1.95 | 2.45 × 10−6 | |
| Cat Swarm Optimization | 1.95 × 10−3 | 180.84 | 7.96 × 10−1 | 3.90 × 10−6 | |
| Grey Wolf Optimizer | 3.40 × 10−3 | 439.69 | 6.40 × 10−1 | 6.80 × 10−6 | |
| Differential Evolution | 8.61 × 10−3 | 502.86 | 1.36 | 1.72 × 10−5 | |
| Particle Swarm Algorithm | 9.41 × 10−3 | 866.57 | 1.36 | 1.88 × 10−5 | |
| Flower Pollination Algorithm | 1.09 × 10−2 | 1000.00 | 1.89 | 2.18 × 10−5 | |
| Sine Cosine Algorithm | 1.22 × 10−2 | 417.41 | 5.25 × 10−1 | 2.45 × 10−5 | |
| Clonal Selection Algorithm | 1.38 × 10−2 | 951.05 | 1.35 | 2.76 × 10−5 | |
| Bees Algorithm | 1.46 × 10−2 | 946.30 | 4.75 | 2.93 × 10−5 | |
| Harmony Search | 1.69 × 10−2 | 1000.00 | 1.35 × 10−1 | 3.38 × 10−5 | |
| Genetic Algorithm | 2.18 × 10−2 | 1000.00 | 3.24 × 10−1 | 2.18 × 10−3 | |
| Firefly Algorithm | 2.29 × 10−2 | 971.10 | 1.67 × 101 | 4.58 × 10−5 | |
| Bacterial Foraging Optimization | 2.95 × 10−2 | 998.50 | 5.87 | 5.90 × 10−5 | |
| Gravitational Search Algorithm | 3.15 × 10−2 | 972.95 | 1.52 | 6.31 × 10−5 | |
| Forest Optimization Algorithm | 3.90 × 10−2 | 1000.00 | 5.16 × 10−1 | 7.79 × 10−5 | |
| Bat Algorithm | 8.00 × 10−2 | 994.59 | 9.75 × 10−1 | 1.60 × 10−4 | |
| Moth Flame Optimizer | 1.38 × 10−1 | 998.66 | 9.12 × 10−1 | 2.76 × 10−4 | |
| Sine Cosine Algorithm | Pinter | 3.69 × 10−5 | 269.614 | 5.62 × 10−1 | 7.38 × 10−8 |
| Fireworks Algorithm | 4.79 × 10−5 | 80.12 | 1.21 | 9.58 × 10−8 | |
| Differential Evolution | 6.54 × 10−5 | 205.1 | 1.13 | 1.31 × 10−7 | |
| Firefly Algorithm | 6.58 × 10−5 | 240.378 | 8.05 | 1.32 × 10−7 | |
| Cuckoo Search | 6.72 × 10−5 | 366.782 | 1.35 | 1.34 × 10−7 | |
| Cat Swarm Optimization | 8.66 × 10−5 | 42.148 | 2.49 × 10−1 | 1.73 × 10−7 | |
| Harris Hawks Optimization | 9.47 × 10−5 | 17.048 | 9.11 × 10−2 | 1.89 × 10−7 | |
| Flower Pollination Algorithm | 1.61 × 10−4 | 889.718 | 2.46 | 3.22 × 10−7 | |
| Artificial Bee Colony Algorithm | 1.92 × 10−4 | 353.71 | 1.04 | 3.85 × 10−7 | |
| Grey Wolf Optimizer | 3.74 × 10−2 | 39.032 | 1.83 × 10−1 | 7.48 × 10−5 | |
| Gravitational Search Algorithm | 1.01 | 357.948 | 1.28 | 2.01 × 10−3 | |
| Moth Flame Optimizer | 2.37 | 632.918 | 1.57 | 4.75 × 10−3 | |
| Particle Swarm Algorithm | 2.59 | 320.354 | 7.60 × 10−1 | 5.19 × 10−3 | |
| Forest Optimization Algorithm | 2.65 | 1000 | 1.33 | 5.30 × 10−3 | |
| Fish School Search | 3.96 | 999.66 | 6.25 | 7.93 × 10−3 | |
| Harmony Search | 9.54 | 1000 | 1.25 × 10−1 | 1.91 × 10−2 | |
| Bacterial Foraging Optimization | 10.4 | 1000 | 8.44 | 2.09 × 10−2 | |
| Bees Algorithm | 13.2 | 597.326 | 7.65 | 2.64 × 10−2 | |
| Genetic Algorithm | 17.8 | 1000 | 1.03 | 1.78 | |
| Bat Algorithm | 32.2 | 761.046 | 1.84 | 6.45 × 10−2 | |
| Clonal Selection Algorithm | 56.0 | 985.222 | 3.64 | 1.12 × 10−1 | |
| Sine Cosine Algorithm | Powell | 3.79 × 10−5 | 270.806 | 3.28 × 10−1 | 7.58 × 10−8 |
| Fireworks Algorithm | 4.36 × 10−5 | 112.154 | 6.03 × 10−1 | 8.72 × 10−8 | |
| Grey Wolf Optimizer | 6.16 × 10−5 | 31.632 | 1.03 × 10−1 | 1.23 × 10−7 | |
| Flower Pollination Algorithm | 6.25 × 10−5 | 339.416 | 7.87 × 10−1 | 1.25 × 10−7 | |
| Firefly Algorithm | 6.38 × 10−5 | 178.004 | 4.77 | 1.28 × 10−7 | |
| Cuckoo Search | 6.39 × 10−5 | 138.046 | 3.20 × 10−1 | 1.28 × 10−7 | |
| Gravitational Search Algorithm | 6.54 × 10−5 | 194.274 | 6.73 × 10−1 | 1.31 × 10−7 | |
| Bat Algorithm | 6.68 × 10−5 | 141.476 | 1.89 × 10−1 | 1.34 × 10−7 | |
| Fish School Search | 7.18 × 10−5 | 952.01 | 2.81 | 1.44 × 10−7 | |
| Particle Swarm Algorithm | 7.35 × 10−5 | 171.714 | 3.70 × 10−1 | 1.47 × 10−7 | |
| Cat Swarm Optimization | 8.20 × 10−5 | 29.168 | 1.32 × 10−1 | 1.64 × 10−7 | |
| Harris Hawks Optimization | 1.72 × 10−4 | 14.4 | 5.09 × 10−2 | 3.44 × 10−7 | |
| Clonal Selection Algorithm | 1.80 × 10−4 | 308.52 | 8.33 × 10−1 | 3.59 × 10−7 | |
| Artificial Bee Colony Algorithm | 2.90 × 10−4 | 958.778 | 1.95 | 5.80 × 10−7 | |
| Bees Algorithm | 5.67 × 10−4 | 808.19 | 6.47 | 1.13 × 10−6 | |
| Forest Optimization Algorithm | 2.51 × 10−2 | 997.9 | 8.70 × 10−1 | 5.03 × 10−5 | |
| Bacterial Foraging Optimization | 3.43 × 10−2 | 997.456 | 5.08 | 6.87 × 10−5 | |
| Differential Evolution | 4.52 | 176.416 | 5.83 × 10−1 | 9.05 × 10−3 | |
| Genetic Algorithm | 7.90 | 1000 | 5.65 × 10−1 | 7.90 × 10−1 | |
| Harmony Search | 11.7 | 1000 | 1.01 × 10−1 | 2.33 × 10−2 | |
| Moth Flame Optimizer | 98.2 | 892.974 | 1.11 | 1.96 × 10−1 | |
| Artificial Bee Colony Algorithm | Qing | 5.73 × 10−5 | 57.068 | 1.23 × 10−1 | 1.15 × 10−7 |
| Differential Evolution | 6.46 × 10−5 | 227.682 | 7.35 × 10−1 | 1.29 × 10−7 | |
| Bees Algorithm | 6.54 × 10−5 | 60.376 | 4.47 × 10−1 | 1.31 × 10−7 | |
| Gravitational Search Algorithm | 6.55 × 10−5 | 226.204 | 7.34 × 10−1 | 1.31 × 10−7 | |
| Bat Algorithm | 6.58 × 10−5 | 157.976 | 1.48 × 10−1 | 1.32 × 10−7 | |
| Firefly Algorithm | 6.63 × 10−5 | 204.654 | 3.69 | 1.33 × 10−7 | |
| Moth Flame Optimizer | 6.92 × 10−5 | 431.196 | 6.93 × 10−1 | 1.38 × 10−7 | |
| Particle Swarm Algorithm | 6.93 × 10−5 | 130.818 | 2.41 × 10−1 | 1.39 × 10−7 | |
| Cuckoo Search | 6.94 × 10−5 | 172.876 | 2.09 × 10−1 | 1.39 × 10−7 | |
| Fish School Search | 7.02 × 10−5 | 989.846 | 2.07 | 1.40 × 10−7 | |
| Harris Hawks Optimization | 1.17 × 10−4 | 737.712 | 1.53 | 2.34 × 10−7 | |
| Flower Pollination Algorithm | 3.91 × 10−4 | 978.582 | 1.29 | 7.81 × 10−7 | |
| Forest Optimization Algorithm | 3.16 × 10−3 | 996.474 | 4.68 × 10−1 | 6.32 × 10−6 | |
| Bacterial Foraging Optimization | 7.55 × 10−3 | 1000 | 3.94 | 1.51 × 10−5 | |
| Fireworks Algorithm | 1.32 × 10−2 | 1000 | 3.85 | 2.64 × 10−5 | |
| Harmony Search | 1.77 × 10−2 | 1000 | 6.30 × 10−2 | 3.54 × 10−5 | |
| Clonal Selection Algorithm | 2.53 × 10−2 | 911.428 | 9.80 × 10−1 | 5.07 × 10−5 | |
| Cat Swarm Optimization | 3.69 × 10−2 | 1000 | 3.08 | 7.38 × 10−5 | |
| Grey Wolf Optimizer | 7.70 × 10−2 | 1000 | 1.43 | 1.54 × 10−4 | |
| Genetic Algorithm | 1.85 × 10−1 | 1000 | 3.63 × 10−1 | 1.85 × 10−2 | |
| Sine Cosine Algorithm | 2.81 | 1000 | 6.38 × 10−1 | 5.62 × 10−3 |
| Reference | Publication Year | Application | Algorithm |
|---|---|---|---|
| [427] | 1996 | Conceptual design | GA |
| [428] | 2022 | Conceptual design | MFA, MPA, SMA, SSA |
| [433] | 2002 | Conceptual design | PSO |
| [437] | 2004 | Multidisciplinary design optimization | GA |
| [438] | 2009 | Multidisciplinary design optimization | PSO |
| [439] | 2016 | Multidisciplinary design optimization | ABC |
| [440] | 2019 | Engine modeling and design | GA, PSO, ACO, ABC, IWO |
| [441] | 2009 | Electric motor optimization | GA |
| [442] | 2021 | Propulsion system optimization | GA |
| Reference | Publication Year | Application | Algorithm |
|---|---|---|---|
| [445] | 2005 | Component (rib, wing, etc.) design | GA |
| [446] | 2009 | Pressure bulkhead design | GA, PSO, CO |
| [447] | 2021 | Welding process optimization | GA |
| [448] | 2015 | Elastic optimization | PSO |
| [449] | 2018 | Stiffened panels optimization | HS |
| [450] | 2014 | Aeroelastic composite wing design | BCO |
| [451] | 2014 | Aeroelastic tailoring and scaling | BFO |
| Reference | Publication Year | Application | Algorithm |
|---|---|---|---|
| [455] | 2018 | Airfoil design | GA, SA |
| [456] | 2001 | Wing and blade airfoil design | ES |
| [457] | 2019 | Airfoil design | FFO |
| [458] | 2021 | Airfoil design | PSO, GA |
| [459] | 2016 | Airfoil design | CS |
| [460] | 2015 | Blade design | ABC |
| [461] | 2017 | Airfoil design | GSA |
| [462] | 2022 | Airfoil design | HS |
| [463] | 2013 | Aerodynamic shape optimization | HS |
| [382] | 2016 | Aerodynamic shape optimization | SCA |
| [466] | 1999 | Wing design | GA |
| [467] | 2004 | Wing design | PSO |
| [468] | 2011 | Wing design | ACO |
| [469] | 2019 | Wing design | DE |
| [470] | 2019 | Wing design | FSO |
| [471] | 2017 | Wing tip design | ABC |
| [474] | 2016 | Equipment placement in body | GA |
| [475] | 2017 | Equipment placement in body | BA |
| [476] | 2017 | Body shape design | GA |
| [478] | 2017 | Body shape design | PSO |
| [479] | 2012 | Body sizing | DE |
| Reference | Publication Year | Application | Algorithm |
|---|---|---|---|
| [481] | 2022 | Path and motion planning | PSO |
| [482] | 2019 | Path and motion planning | ACO |
| [483] | 2020 | Path and motion planning | DE |
| [484] | 2023 | Path and motion planning | GWO |
| [485] | 2021 | Path and motion planning | GA |
| [486] | 2019 | Path and motion planning | BA |
| [487] | 2020 | Target tracking | BA |
| [488] | 2017 | Optimal Control | BA |
| [489] | 2013 | Optimal Landing | BA |
| [490] | 2017 | Route evaluation | CSA |
| [491] | 2019 | Trajectory tracking | CS |
| [492] | 2019 | Trajectory planning | CS |
| [493] | 2011 | Path and motion planning | DE, PSO, GA |
| [494] | 2005 | Path and motion planning | DE |
| [495] | 2016 | Path and motion planning | FAO, DE, PSO, GA |
| [496] | 2022 | Path and motion planning | FAO, DE |
| [497] | 2022 | Trajectory planning | FPA |
| [498] | 2012 | Path and motion planning | GSA |
| [499] | 2020 | Path and motion planning | GWO |
| [500] | 2022 | Path and motion planning | BOA |
| [504] | 2023 | Drone-Truck path planning | WWO, GA, PSO, DE, BBO, EBO |
| [505] | 2020 | Optimal landing | MFO, BOA, ABC |
| [506] | 2021 | Optimal landing | DFO, DE |
| [507] | 2020 | Optimal landing | FPA |
| [508] | 2018 | Optimal landing | FPA |
| [509] | 2021 | Optimal landing | GWO |
| [510] | 2017 | Optimal landing | HS |
| [511] | 2014 | Optimal landing | BA |
| [512] | 2008 | Optimal landing | CSA |
| [513,514] | 2019 | Optimal space trajectory | GA, PSO, ACO |
| [516] | 2015 | Optimal space trajectory | GSA |
| [517] | 2020 | Optimal space control | FAO |
| [518] | 2016 | Optimal trajectory | FAO |
| [519] | 2016 | Air traffic control | GSA |
| [520] | 2019 | Trajectory tracking | GWO |
| [521] | 2019 | Engine control | GWO |
| [522] | 2015 | Robust control | BA |
| [523] | 2015 | Control parameter tunning | ABC |
| [524] | 2019 | Control parameter tunning | BFA |
| [525] | 2010 | Control parameter tunning | BFA |
| [526] | 2016 | Control parameter tunning | BA |
| [527] | 2015 | Control parameter tunning | BeeA |
| [528] | 2015 | Control parameter tunning | CS |
| [529] | 2022 | Control parameter tunning | BA, PSO, CS |
| [530] | 2020 | Control parameter tunning | CS |
| [531] | 2016 | Control parameter tunning | DE |
| [532] | 2016 | Control parameter tunning | DE |
| [533] | 2021 | Control parameter tunning | FA |
| [534] | 2021 | Control parameter tunning | FA |
| [535] | 2015 | Control parameter tunning | FA |
| [536] | 2022 | Control parameter tunning | FA |
| [537] | 2018 | Control parameter tunning | FAO |
| [538] | 2019 | Control parameter tunning | FPA |
| [539] | 2020 | Control parameter tunning | GSO |
| [540] | 2017 | Control parameter tunning | GSO |
| [541] | 2021 | Control parameter tunning | HS |
| [542] | 2020 | Control parameter tunning | HHO |
| [543] | 2023 | Control parameter tunning | PIO |
| [544] | 2022 | Control parameter tunning | PSO |
| [545] | 2022 | Swarm motion and formation | BeeA |
| [546] | 2019 | Swarm motion and formation | DE |
| [547] | 2019 | Swarm motion and formation | DE |
| [548] | 2020 | Swarm motion and formation | GWO |
| [549] | 2022 | Swarm motion and formation | MFO |
| [550] | 2023 | Swarm motion and formation | PSO |
| [551] | 2020 | Swarm motion and formation | GA |
| [552] | 2023 | Swarm motion and formation | ACO, DE |
| [553] | 2017 | Swarm motion and formation | HS |
| [554] | 2022 | Swarm mission planning and task allocation | FAO |
| [555] | 2022 | Swarm mission planning and task allocation | FAO |
| [556] | 2022 | Swarm mission planning and task allocation | HS |
| [557] | 2023 | Swarm mission planning and task allocation | LSA, PSO, SA |
| [558] | 2017 | Vibration reduction | BeeA |
| [559] | 2014 | Vibration reduction | BeeA |
| Reference | Publication Year | Application | Algorithm |
|---|---|---|---|
| [560] | 2015 | Helicopter UAV identification | ABC, GA |
| [561] | 2017 | Helicopter UAV identification | ABC, PSO |
| [563] | 2019 | Quadrotor identification | PSO, CS |
| [564] | 2014 | Quadrotor identification | GA |
| [565] | 2016 | Multirotor UAV identification | DE |
| [566] | 2014 | Helicopter UAV identification | DE |
| [567] | 2022 | Fixed-wing drone identification | AlO, DA, GOA, GWO, SlpSO, WOA, SCA, WCA, ES, MFO |
| [568] | 2014 | Aircraft identification | HS |
| [569] | 2014 | Helicopter UAV | HS |
| Reference | Publication Year | Application | Algorithm |
|---|---|---|---|
| [570] | 2022 | Automatic drone navigation | BA, MFO, PSO, CS, GWO |
| [571] | 2022 | Localization in swarm | PSO |
| [572] | 2022 | INS error reduction | ABC |
| [573] | 2014 | Target recognition | ABC |
| [574] | 2021 | In-door navigation | CSA |
| [575] | 2021 | Target recognition | CS |
| [576] | 2018 | Localization in swarm | DE |
| [577] | 2016 | Radar imaging | DE |
| [578] | 2021 | Localization in swarm | GWO |
| [484] | 2023 | GPS-denied navigation | GWO |
| [579] | 2016 | Obstacle avoidance | GWO |
| [580] | 2022 | Target tracking | SCA, PSO, FAO, SMOA |
| [581] | 2023 | Target tracking | PSO |
| [582] | 2022 | INS error reduction | PIO |
| Reference | Publication Year | Application | Algorithm |
|---|---|---|---|
| [585] | 2021 | Optimized routing | GA |
| [586] | 2020 | Network deployment and coverage | GA |
| [587] | 2023 | Mobile edge computing | DE |
| [588] | 2019 | Coverage optimization | BeeA |
| [589] | 2020 | Coverage optimization | PSO |
| [590] | 2022 | Optimal charging (by path planning and obstacle avoidance) | PSO |
| [593] | 2023 | Wireless sensing | ACO |
| [594] | 2022 | Coverage optimization | GA |
| Conceptual Design | Multidisciplinary Design | Engine Design | Structure Design | Airfoil Design | Wing & Tail Design | Body Design | Control | System Identification | Navigation | Drone Communication | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Artificial Bee Colony | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||
| Bacterial Foraging Optimization | ✓ | ✓ | ✓ | ✓ | |||||||
| Bat Algorithm | ✓ | ✓ | ✓ | ||||||||
| Bees Algorithm | ✓ | ||||||||||
| Cat Swarm Optimization | |||||||||||
| Clonal Selection Algorithm | ✓ | ✓ | |||||||||
| Cuckoo Search | ✓ | ✓ | ✓ | ✓ | |||||||
| Differential Evolution | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||
| Firefly Algorithm | ✓ | ✓ | ✓ | ||||||||
| Fireworks Algorithm | ✓ | ||||||||||
| Fish School Search | ✓ | ||||||||||
| Flower Pollination Algorithm | ✓ | ||||||||||
| Forest Optimization Algorithm | |||||||||||
| Genetic Algorithm | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Gravitational Search Algorithm | ✓ | ✓ | |||||||||
| Grey Wolf Optimizer | ✓ | ✓ | ✓ | ✓ | |||||||
| Harmony Search | ✓ | ✓ | ✓ | ✓ | |||||||
| Harris Hawks Optimization | ✓ | ||||||||||
| Moth Flame Optimizer | ✓ | ✓ | ✓ | ✓ | |||||||
| Particle Swarm Algorithm | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Sine Cosine Algorithm | ✓ | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darvishpoor, S.; Darvishpour, A.; Escarcega, M.; Hassanalian, M. Nature-Inspired Algorithms from Oceans to Space: A Comprehensive Review of Heuristic and Meta-Heuristic Optimization Algorithms and Their Potential Applications in Drones. Drones 2023, 7, 427. https://0-doi-org.brum.beds.ac.uk/10.3390/drones7070427
Darvishpoor S, Darvishpour A, Escarcega M, Hassanalian M. Nature-Inspired Algorithms from Oceans to Space: A Comprehensive Review of Heuristic and Meta-Heuristic Optimization Algorithms and Their Potential Applications in Drones. Drones. 2023; 7(7):427. https://0-doi-org.brum.beds.ac.uk/10.3390/drones7070427
Chicago/Turabian StyleDarvishpoor, Shahin, Amirsalar Darvishpour, Mario Escarcega, and Mostafa Hassanalian. 2023. "Nature-Inspired Algorithms from Oceans to Space: A Comprehensive Review of Heuristic and Meta-Heuristic Optimization Algorithms and Their Potential Applications in Drones" Drones 7, no. 7: 427. https://0-doi-org.brum.beds.ac.uk/10.3390/drones7070427