

Slope Failure and Landslide Detection in Huangdao District of Qingdao City Based on an Improved Faster R-CNN Model
Abstract
:1. Introduction
2. Materials and Methods
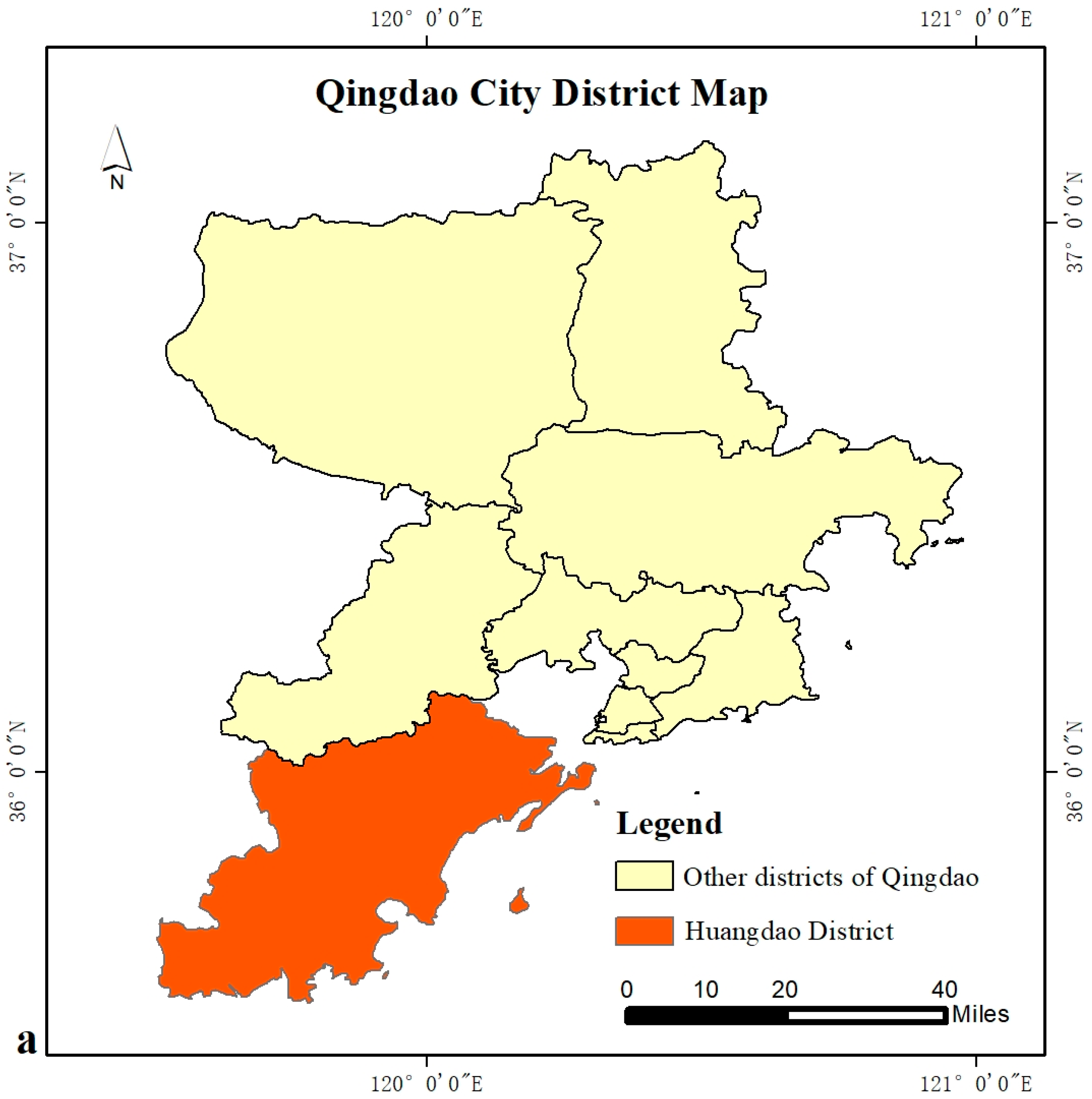
2.1. Study Area
2.2. Methods
2.2.1. Backbone Feature Extraction Network
- Backbone feature extraction network based on VGG16.
- 2.
- Backbone feature extraction network based on ResNet50.
2.2.2. Multi-Scale Feature Enhancement Module
2.2.3. Candidate Region Extraction
2.2.4. Pooling of Areas of Interest
2.2.5. Classification and Regression Prediction
2.2.6. Evaluation Indicators
3. Results
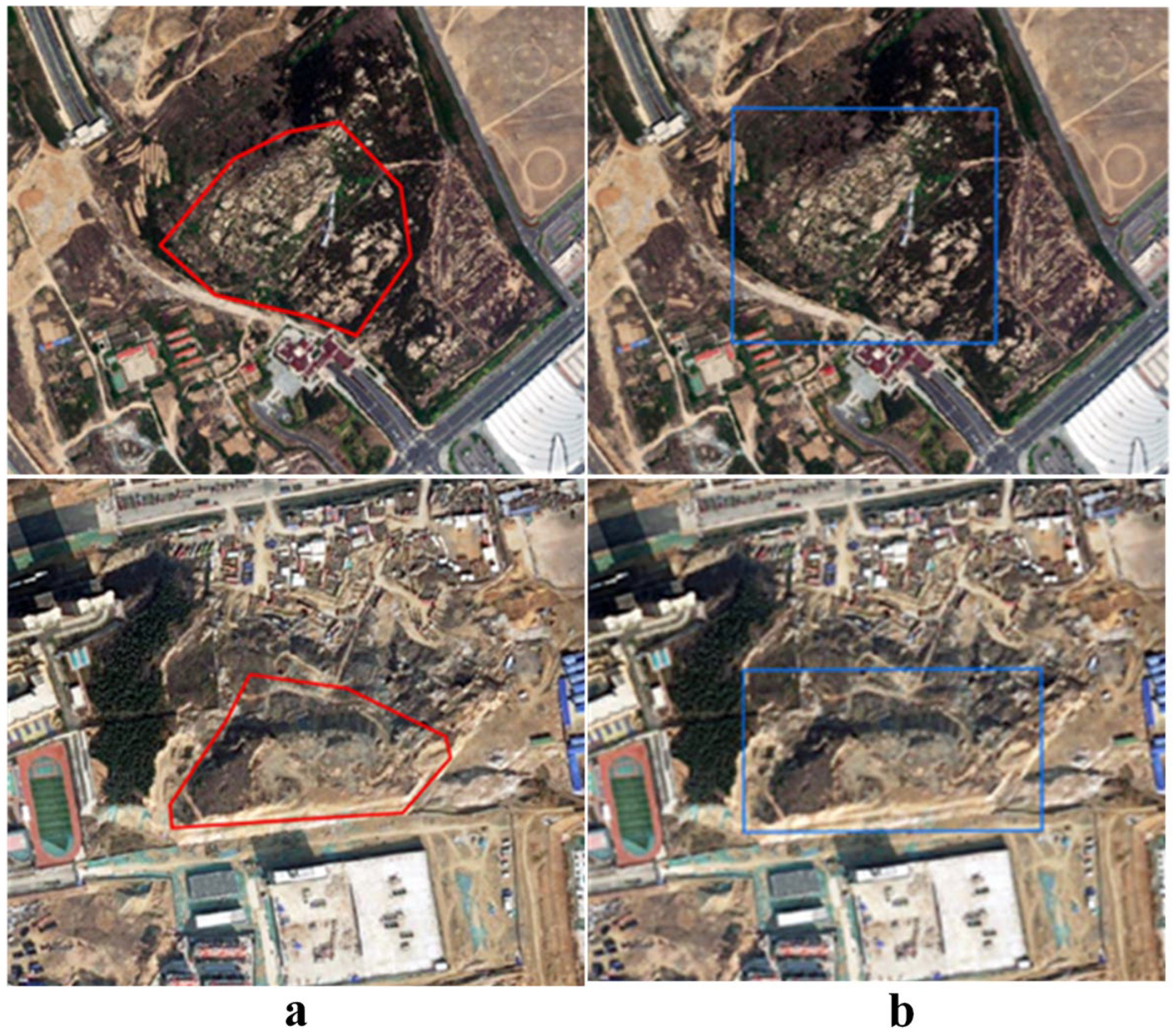
3.1. Experimental Data Set Creation
3.2. Experimental Configuration
3.3. Model Evaluation Results
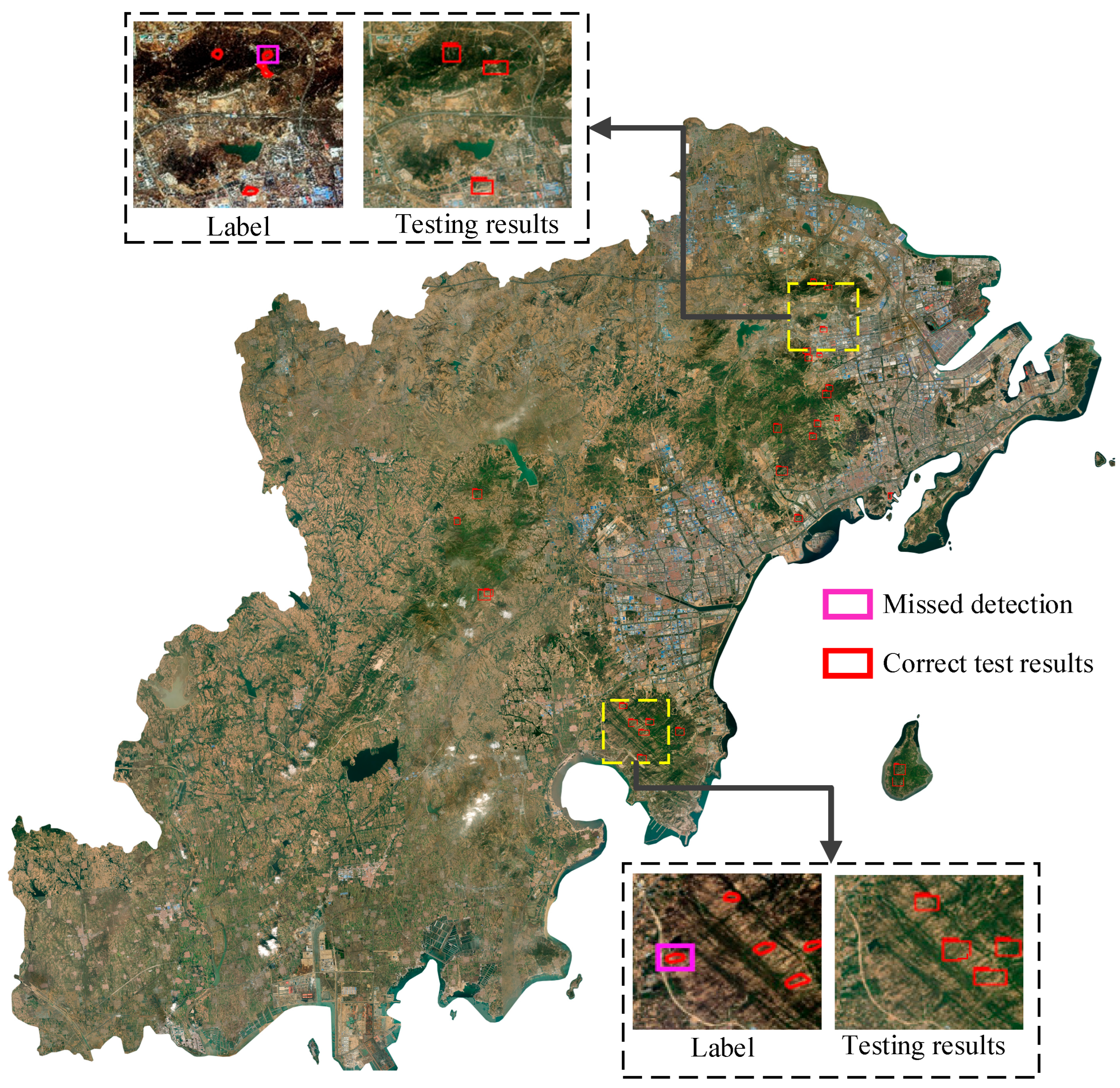
3.4. Detection Results of Slope Failure and Landslide in Huangdao
4. Discussion
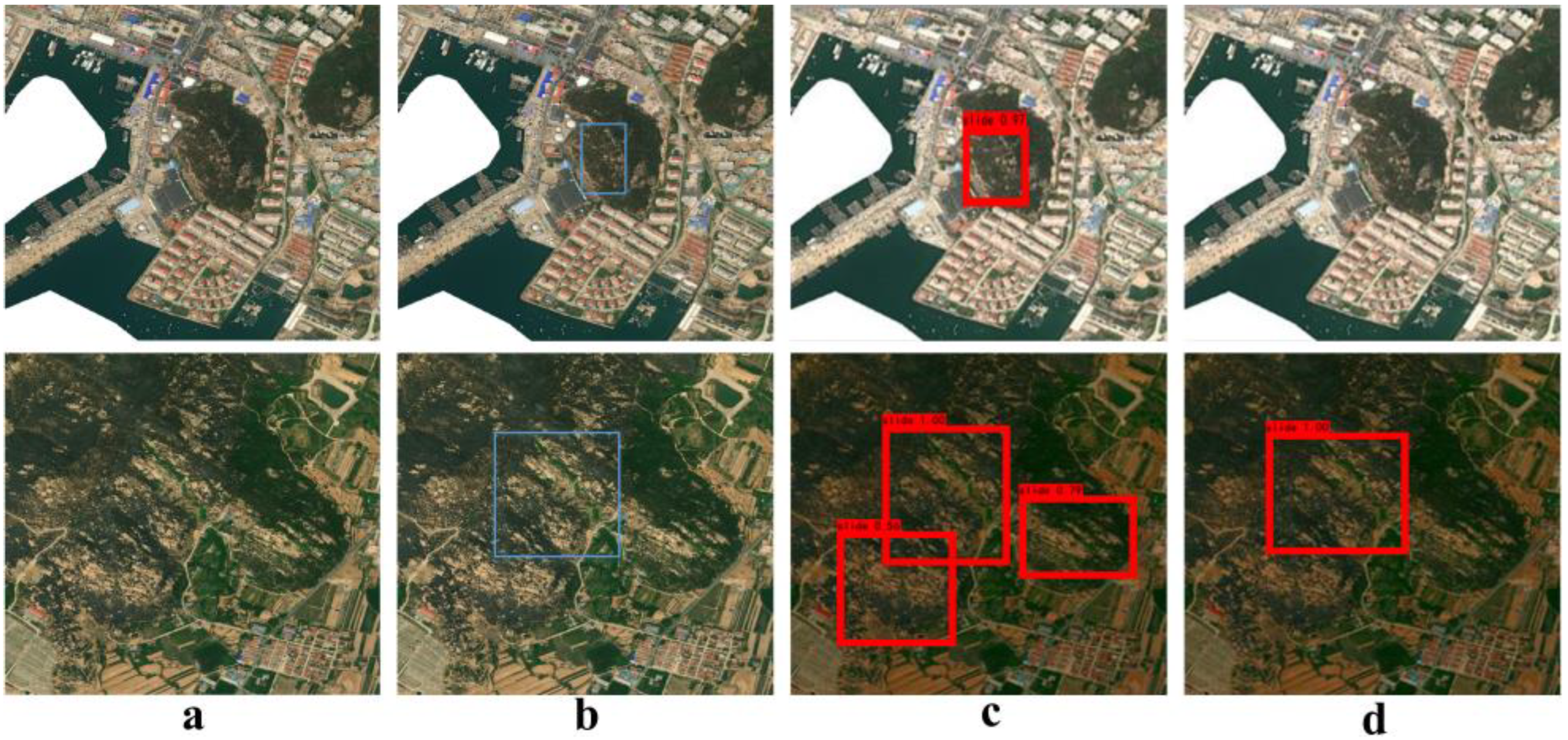
4.1. Comparison of Experimental Results between VGG-16 and ResNet50
4.2. Experimental Parameters of Improved Faster R-CNN Network
4.3. Significance and Challenges of the Model
5. Conclusions
- Based on the experimental results, it is evident that the enhanced Faster R-CNN networks equipped with VGG-16 and ResNet-50 backbone networks demonstrate exceptional performance in detecting slope failure and landslide. Both models achieved an impressive overall accuracy of approximately 90%, indicating reliable and dependable detection outcomes. The ResNet50 model with the better detection performance is the superior backbone network in this regard, exhibiting an AP value of 90.68%, an F1 value of 0.94, a recall rate of 90.68%, and a precision value as high as 98.17%. Although VGG16 has more dispersed prediction targets and a higher false detection rate than ResNet50, it is more effective in predicting small-scale slope failure and landslide disasters.
- In the case of Huangdao District, the images were divided with overlapping sections and fed into the enhanced Faster R-CNN network for prediction. The prediction results from each section were then stitched together. The detection outcomes revealed that the vast majority of slope failure and landslide points were accurately identified, with only two points going undetected. This showcases the network’s ability to achieve high accuracy in detecting slope failure and landslide geological disasters.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ji, S.; Yu, D.; Shen, C.; Li, W.; Xu, Q. Landslide detection from an open satellite imagery and digital elevation model dataset using attention boosted convolutional neural networks. Landslides 2020, 17, 1337–1352. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Lin, R.F.; Liu, J.P.; Xu, S.H.; Liu, M.M.; Zhang, M.; Liang, E.J. Evaluation method of landslide susceptibility based on random forest weighted information. Sci. Surv. Mapp. 2020, 45, 131–138. [Google Scholar] [CrossRef]
- Xu, J.H.; Sun, D.L.; Wang, Y.; Wen, H.J.; Wang, Z.Z. Landslide Susceptibility Mapping of Fengjie County Based on GIS and Improved Analytic Hierarchy Process. J. Chongqing Norm. Univ. 2020, 37, 36–44. [Google Scholar] [CrossRef]
- Chen, S.J.; Kang, Q.; Shen, Z.Q.; Zhou, R.C. Landslide Detection Based on Color Feature Model and SVM in Remote Sensing Imagery. Spacecr. Recovery Remote Sens. 2019, 40, 89–98. [Google Scholar]
- Guo, Z.Z.; Yin, K.L.; Fu, S.; Huang, F.M.; Gui, L.; Xia, H. Evaluation of Landslide Susceptibility Based on GIS and WOE-BP Model. Earth Sci. 2019, 44, 4299–4312. [Google Scholar] [CrossRef]
- Yang, G.H.; Jian, W.X.; Zhang, S.P.; Fu, Z.Y. Discrimination step points of step-landslides based on ensemble learning. Chin. J. Geol. Hazard Control. 2019, 30, 1–8. [Google Scholar] [CrossRef]
- Zhang, X.; Li, S.S.; Wei, G.F.; Zhang, X.N.; Gao, J.W. Fine-grained Object Detection in Remote Sensing Images Based on Multi-scale Features. J. Remote Sens. 2022, 26, 2616–2628. [Google Scholar] [CrossRef]
- Chen, X.; Wan, M.J.; Ma, C.; Chen, Q.; Gu, G.H. Small Object Detection in Remote Sensing Images using Multi-scale Feature Fusion SSD. Opt. Precis. Eng. 2021, 29, 2672–2682. [Google Scholar] [CrossRef]
- Liu, B.J.; Xing, X.D.; Wu, H.; Shao, S.H.; Zan, J. Remote Sensing Recognition Method for Tailings Dam based on Deep Learning Support. Sci. Surv. Mapp. 2021, 46, 129–139. [Google Scholar] [CrossRef]
- He, X.; He, Z.Y. A Preliminary Discussion on the Application of Deep Learning Technology to the Automatic Identification of Landslide. Acta Geol. Sichuan 2021, 41, 508–511. [Google Scholar] [CrossRef]
- Ohnishi, Y.; Nishiyama, S.; Yano, T. A study of the application of digital photogrammetry to slope monitoring systems. Int. J. Rock Mech. Min. 2006, 43, 756–766. [Google Scholar] [CrossRef]
- Bhatt, J.; Gangwar, A.; Nijhawan, R.; Gangodkar, D. A Research on Deep Learning Advance for Landslide Classification using Convolutional Neural Networks. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 2278–3075. [Google Scholar] [CrossRef]
- Ma, H.R.; Feng, T.J.; Ji, R. High-Resolution Remote Sensing Image Land Cover Classification Based on FCN and Object-Oriented Method. Hubei Agric. Sci. 2022, 61, 163–168. [Google Scholar] [CrossRef]
- Xu, Z.Y.; Shen, Z.F.; Li, Y.; Zhao, L.F.; Ke, Y.M.; Li, L.L.; Wen, Q. High-Resolution Remote Sensing Image Classification with Enhanced DeepLab Algorithm and Adaptive Loss Function. J. Remote Sens. 2022, 26, 406–415. [Google Scholar] [CrossRef]
- Zhang, P.Q.; Liu, B.; Zuo, X.B.; Y, X.C. Spatial-spectral Feature Classification of Hyperspectral Image Using Deep Convolutional—Recurrent Neural Network. J. Geomat. Sci. Technol. 2021, 38, 368–373. [Google Scholar]
- Cui, W.; He, X.; Yao, M.; Wang, Z.; Li, J.; Hao, Y.; Wu, W.; Zhao, H.; Chen, X.; Cui, W. Landslide Image Captioning Method Based on Semantic Gate and Bi-Temporal LSTM. ISPRS Int. J. Geo-Inf. 2020, 9, 194. [Google Scholar] [CrossRef] [Green Version]
- He, J.F.; Chen, H.W.; Luo, D.H. Overview of Real-time Semantic Segmentation Algorithms Based on Deep Learning. Comput. Eng. Appl. 2023, 59, 13–27. [Google Scholar] [CrossRef]
- Yang, H.J.; Li, L.Q.; Wang, D. Deep Learning Image Restoration Combining Semantic Segmentation and Edge Reconstruction. J. Image Graph. 2022, 27, 3553–3565. [Google Scholar]
- Wang, Y.X.; Wu, Y.G.; Xu, C.G. Infrared Warship Target Detection Algorithm Based on Deep Transfer Learning. Aerosp. Def. 2021, 4, 61–66. [Google Scholar] [CrossRef]
- Biswajit, J.; Krishna, N.G.; Sanjay, S. Convolutional neural network and its pretrained models for image classification and object detection: A survey. Concurr. Comput. Pract. Exp. 2021, 34, 6767. [Google Scholar] [CrossRef]
- Ju, Y.Z.; Xu, Q.; Jin, S.C.; Li, W.L.; Dong, X.J.; Guo, Q.H. Automatic Object Detection of Loess Landslide Based on Deep Learning. Geomat. Inf. Sci. Wuhan Univ. 2020, 45, 1747–1755. [Google Scholar] [CrossRef]
- Yang, X.; Wang, F.; Bai, Z.; Xun, F.; Zhang, Y.; Zhao, X. Deep Learning-Based Congestion Detection at Urban Intersections. Sensors 2021, 21, 2052. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Yang, W.; Tang, X.; Liu, J. A Fast Learning Method for Accurate and Robust Lane Detection Using Two-Stage Feature Extraction with YOLO v3. Sensors 2018, 18, 4308. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Gu, X.; Xu, X.; Xu, D.; Zhang, T.; Liu, Z.; Dong, Q. Detection of concealed cracks from ground penetrating radar images based on deep learning algorithm. Constr. Build. Mater. 2021, 273, 121949. [Google Scholar] [CrossRef]
- Lai, W.; Zhou, M.; Hu, F.; Kai, B.; Song, H. Coal Gangue Detection Based on Multi-Spectral Imaging and Improved YOLO v4. Acta Opt. Sin. 2020, 40, 2411001. [Google Scholar] [CrossRef]
- Girshick, R.B.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar] [CrossRef] [Green Version]
- Jena, R.; Pradhan, B.; Alamri, A.M. Susceptibility to Seismic Amplification and Earthquake Probability Estimation Using Recurrent Neural Network (RNN) Model in Odisha, India. Appl. Sci. 2020, 10, 5355. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. IEEE T. Pattern Anal. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R.B. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA; pp. 1440–1448. [Google Scholar] [CrossRef]
- Shaoqing, R.; Kaiming, H.; Ross, G.; Jian, S. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE T. Pattern Anal. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Backbone | AP (%) | F1 | Recall (%) | Precision (%) |
|---|---|---|---|---|---|
| YOLOv5 | CSPDarknet | 88.26 | 0.87 | 82.48 | 92.34 |
| SSD | VGG | 85.33 | 0.85 | 83.05 | 86.73 |
| Traditional Faster R-CNN | VGG16 | 86.12 | 0.90 | 87.29 | 93.64 |
| ResNet50 | 87.45 | 0.92 | 88.14 | 95.41 | |
| Improved Faster R-CNN | VGG16 | 88.04 | 0.92 | 88.98 | 94.59 |
| ResNet50 | 90.68 | 0.94 | 90.68 | 98.17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, Y.; Yu, L.; Hao, S.; Li, L.; Zhang, X.; Hao, M. Slope Failure and Landslide Detection in Huangdao District of Qingdao City Based on an Improved Faster R-CNN Model. GeoHazards 2023, 4, 302-315. https://0-doi-org.brum.beds.ac.uk/10.3390/geohazards4030017
Guan Y, Yu L, Hao S, Li L, Zhang X, Hao M. Slope Failure and Landslide Detection in Huangdao District of Qingdao City Based on an Improved Faster R-CNN Model. GeoHazards. 2023; 4(3):302-315. https://0-doi-org.brum.beds.ac.uk/10.3390/geohazards4030017
Chicago/Turabian StyleGuan, Yong, Lili Yu, Shengyou Hao, Linsen Li, Xiaotong Zhang, and Ming Hao. 2023. "Slope Failure and Landslide Detection in Huangdao District of Qingdao City Based on an Improved Faster R-CNN Model" GeoHazards 4, no. 3: 302-315. https://0-doi-org.brum.beds.ac.uk/10.3390/geohazards4030017