
Generic Patterns for Intrusion Detection Systems in Service-Oriented Automotive and Medical Architectures


Abstract
:1. Introduction
2. Background and Related Work
2.1. Service-Oriented Architectures
2.2. Medical
2.3. Automotive
2.4. Overview of SOA Standards
2.5. Security for SOAs in Medical Field
2.6. Security for SOAs in Automotive Domain
2.7. Security for SOAs in Other Industries
2.8. Intrusion Detection Systems in Other Industries
3. Application of Generic Patterns for an SOA IDS
3.1. Use Cases
3.1.1. Medical Use Case
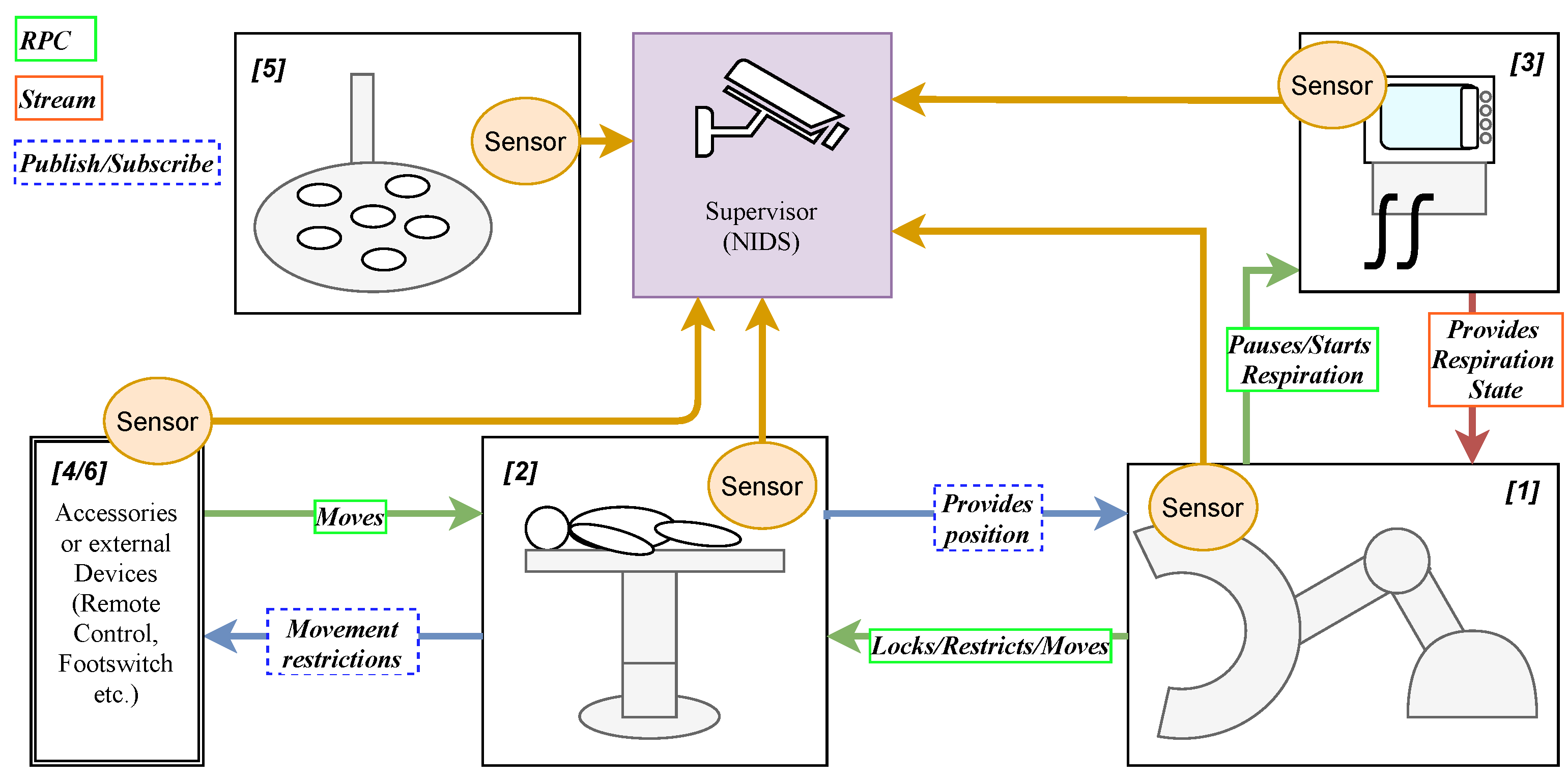
- 1.
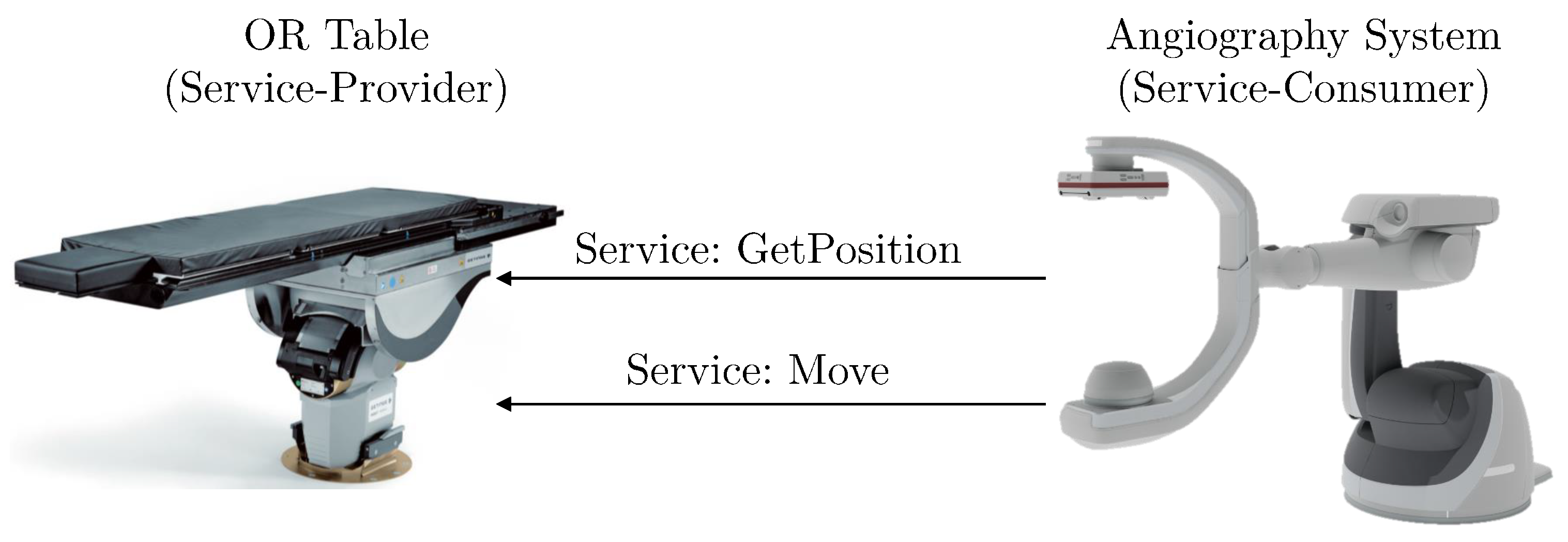
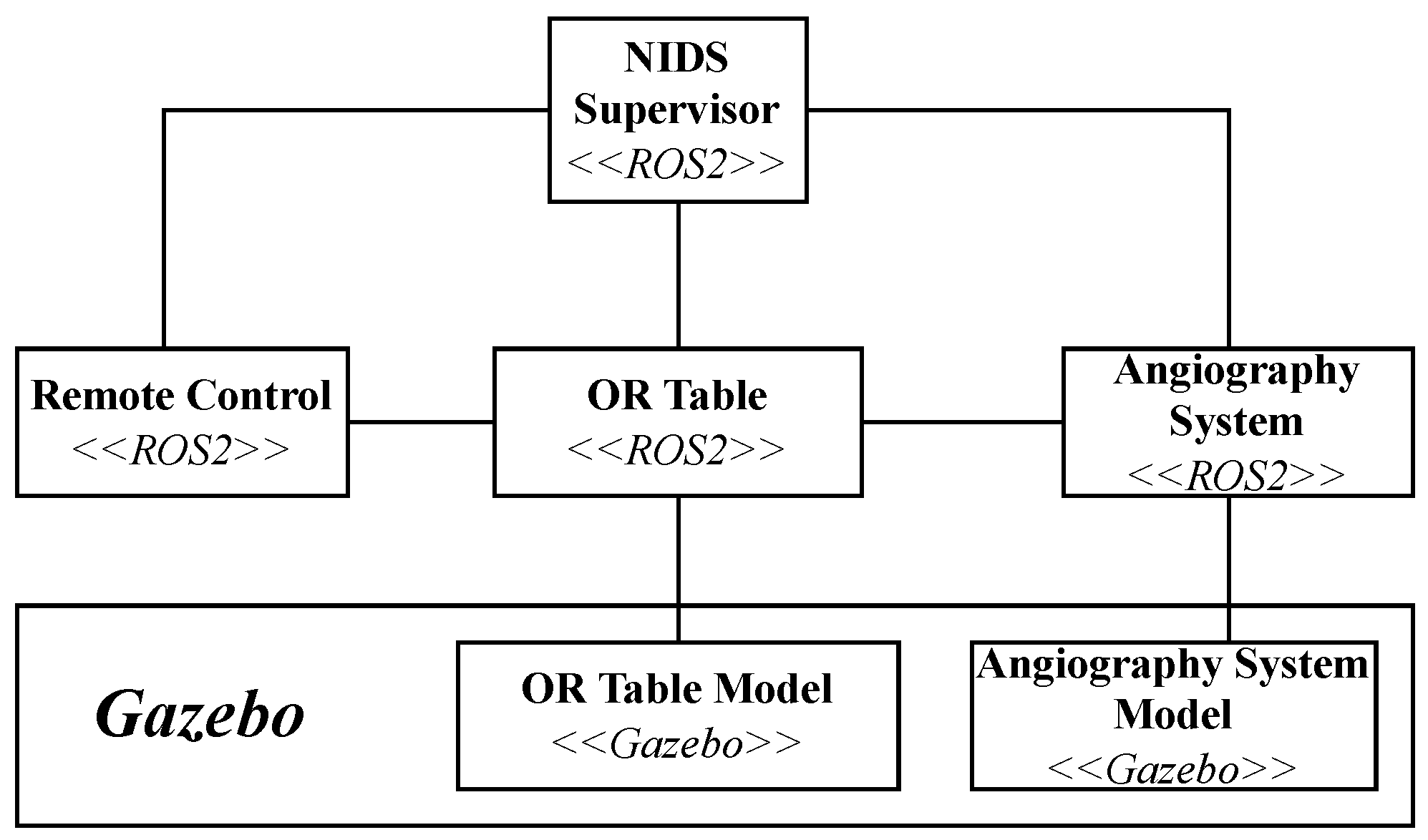
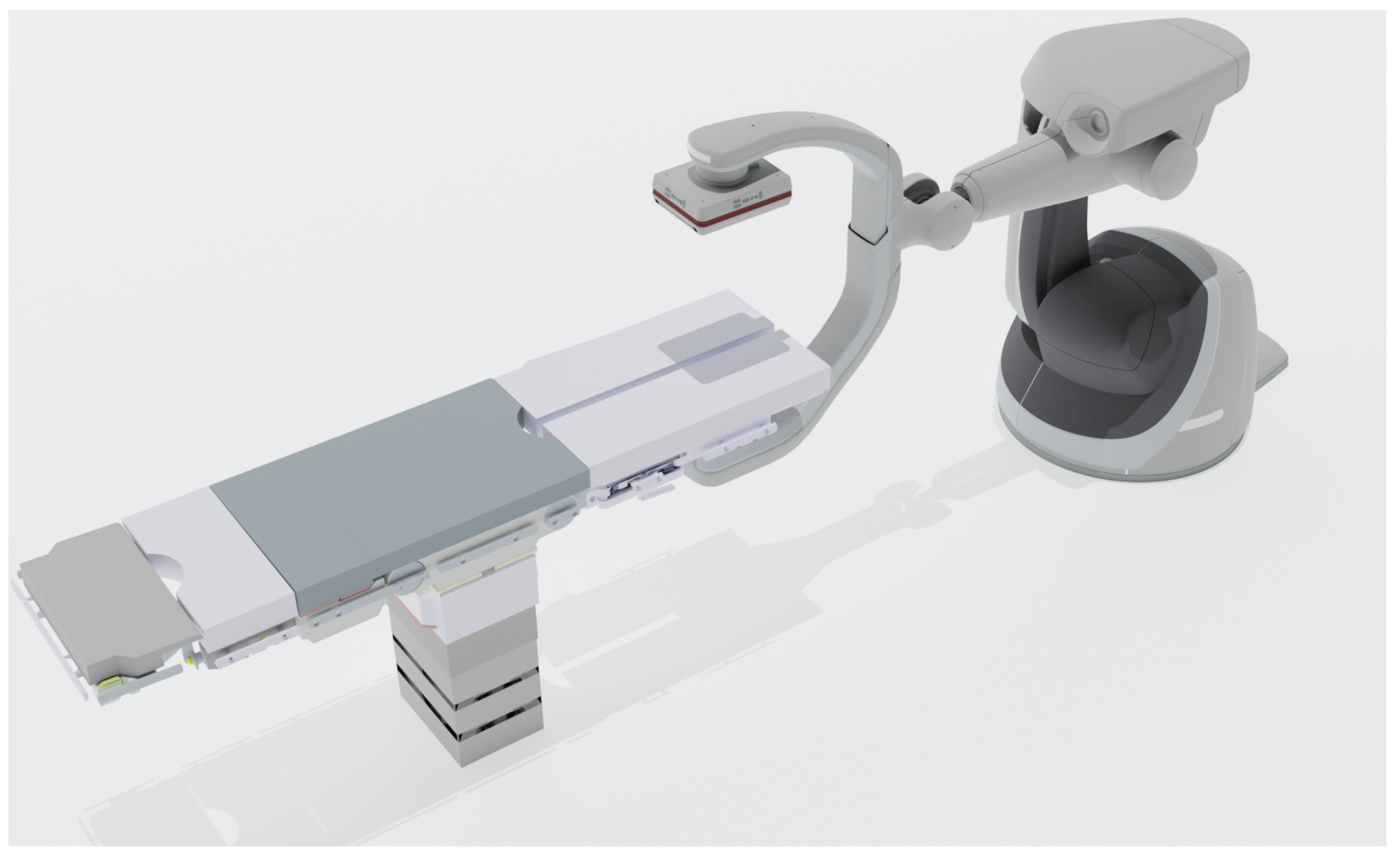
- Angiography System: The angiography system is able to move or restrict/lock the movements of an OR table by RPC to avoid collisions or to prohibit movements during an imaging process.
- 2.
- OR Table: The OR table is the central component in the OR on which the patient lies. It provides its position and possibly restricted movement ranges to other participants via publish/subscribe services.
- 3.
- Ventilator: The ventilator ventilates the patient and can be paused and restarted via an RPC to improve the imaging process by suppressing breathing movements (based on interoperability example from [57]). The information about ongoing respiration (paused or not) is streamed as a respiration state.
- 4.
- Remote Control/Footswitch: A connected remote control or footswitch which is either connected with the OR table via SDC or directly via a proprietary protocol. Both are capable of moving different joints via an RPC of the OR table.
- 5.
- OR Light with Integrated Camera: The integrated camera can be used to detect a table movement or to determine the position of the OR table (lift, longitudinal shift, etc.). Thus, the state of the OR table can be determined externally to provide more context to the IDS.
- 6.
- External Accessory/Device: Since OR tables have a variety of different accessories, it is conceivable in a future scenario that a device might be plugged into an OR table and use it as a gateway to the SDC-Network.
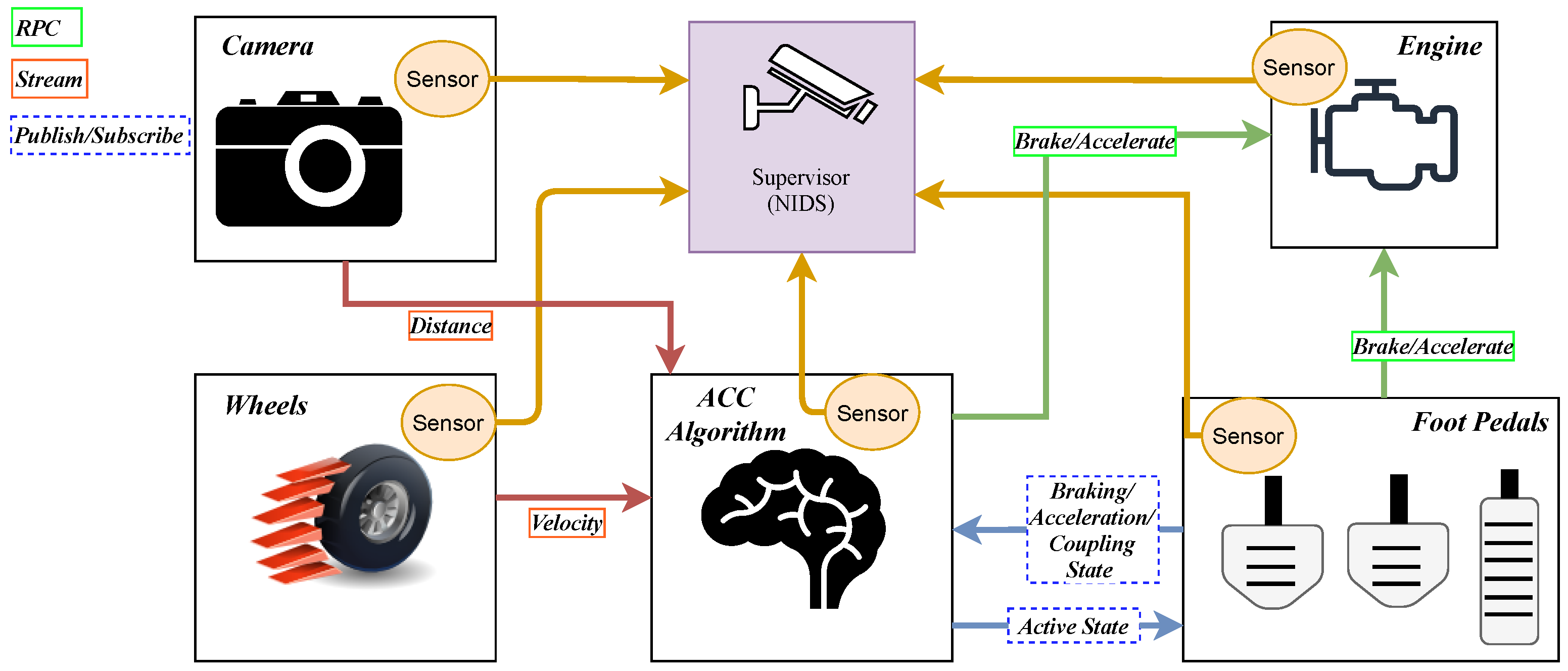
3.1.2. Automotive Use Case
3.1.3. Differences in Use Cases
3.2. Requirements for an SOA IDS Based on Generic Patterns
- R1
- The system must use protocol independent SOA features.
- R2
- The system could use information contained in the specification (specification-based IDS).
- R3
- The system must be able to detect suspicious communication patterns dependent on defined states of the devices.
- R4
- The system could use a fused context information based on the states of the individual participants.
- R5
- The system could use the state of a single participant to detect suspicious service invocations based on the current device state.
- R6
- The system should be able to detect attacks by inspecting the payload.
- R7
- The system should detect suspicious communication patterns on the middleware-layers.
- R8
- The system should collect and classify possible features for the detection such as usage behavior or sensor data (current/voltage, movement information, patient/ user information).
- R9
- The system must be able to detect unknown attacks.
3.3. Detection of Anomaly Patterns
3.4. Detectable Anomalies in Use Cases
3.4.1. Detectable Anomalies in Medical Use Case
3.4.2. Detectable Anomalies in Automotive Use Case
4. Prototypical Implementation for Medical Use Case
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hasan, M. State of IoT 2022: Number of Connected IoT Devices Growing 18% to 14.4 Billion Globally. 2022. Available online: https://iot-analytics.com/number-connected-iot-devices/ (accessed on 23 May 2022).
- Khaitan, S.K.; McCalley, J.D. Design Techniques and Applications of Cyberphysical Systems: A Survey. IEEE Syst. J. 2015, 9, 350–365. [Google Scholar] [CrossRef]
- Vetter, A.; Obergfell, P.; Guissouma, H.; Grimm, D.; Rumez, M.; Sax, E. Development Processes in Automotive Service-oriented Architectures. In Proceedings of the 2020 9th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 8–11 June 2020; pp. 1–7. [Google Scholar] [CrossRef]
- ISO/IEC 18384-1:2016; Information technology—Reference Architecture for Service Oriented Architecture (SOA RA)—Part 1: Terminology and concepts for SOA. ISO: Geneva, Switzerland, 2016.
- Humayed, A.; Lin, J.; Li, F.; Luo, B. Cyber-Physical Systems Security—A Survey. IEEE Internet Things J. 2017, 4, 1802–1831. [Google Scholar] [CrossRef]
- Papaioannou, M.; Karageorgou, M.; Mantas, G.; Sucasas, V.; Essop, I.; Rodriguez, J.; Lymberopoulos, D. A Survey on Security Threats and Countermeasures in Internet of Medical Things (IoMT). Trans. Emerg. Telecommun. Technol. 2020, 33, e4049. [Google Scholar] [CrossRef]
- Wallenfels, M. Medizintechnik rüstet sich für den Kampf gegen Cyberkriminelle. Gynäkol. Geburtshilfe 2017, 22, 44. [Google Scholar] [CrossRef]
- Miller, C.; Vasalek, C. Remote Exploitation of an Unaltered Passenger Vehicle. 2015. Available online: https://ioactive.com/remote-exploitation-of-an-unaltered-passenger-vehicle/ (accessed on 23 May 2022).
- Matheus, K. One-Pair Ethernet in the Automotive Industry, 22 September 2020. Available online: https://singlepairethernet.com/wp-content/uploads/2021/07/SPE-in-Automotive_BMW_K.-Matthews.pdf13.pdf (accessed on 12 July 2022).
- Ferguson, N.; Schneier, B.; Kohno, T. Cryptography Engineering: Design Principles and Practical Applications/Niels Ferguson, Bruce Schneier, Tadayoshi Kohno; Wiley: Indianapolis, IN, USA, 2010. [Google Scholar]
- Lee, I.; Sokolsky, O.; Chen, S.; Hatcliff, J.; Jee, E.; Kim, B.; King, A.; Mullen-Fortino, M.; Park, S.; Roederer, A.; et al. Challenges and Research Directions in Medical Cyber—Physical Systems. Proc. IEEE 2012, 100, 75–90. [Google Scholar] [CrossRef]
- Teber, D.; Engels, C.; Maier-Hein, L.; Ayala, L.; Onogur, S.; Seitel, A.; März, K. Wie weit ist Chirugie 4.0? Der Urologe. Ausg. A 2020, 59, 1035–1043. [Google Scholar] [CrossRef] [PubMed]
- Harris, S.; Maymi, F. CISSP All-In-One Exam Guide, 7th ed.; McGraw-Hill Education: New York, NY, USA, 2016. [Google Scholar]
- Hadžiosmanović, D.; Simionato, L.; Bolzoni, D.; Zambon, E.; Etalle, S. N-Gram against the Machine: On the Feasibility of the N-Gram Network Analysis for Binary Protocols. In Research in Attacks, Intrusions, and Defenses; Lecture Notes in Computer Science; Balzarotti, D., Stolfo, S.J., Cova, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7462, pp. 354–373. [Google Scholar] [CrossRef]
- Rumez, M.; Grimm, D.; Kriesten, R.; Sax, E. An Overview of Automotive Service-Oriented Architectures and Implications for Security Countermeasures. IEEE Access 2020, 8, 221852–221870. [Google Scholar] [CrossRef]
- Ahmad, Z.; Shahid Khan, A.; Wai Shiang, C.; Abdullah, J.; Ahmad, F. Network intrusion detection system: A systematic study of machine learning and deep learning approaches. Trans. Emerg. Telecommun. Technol. 2021, 32, e4150. [Google Scholar] [CrossRef]
- Langmann, R. Vernetzte Systeme für die Automatisierung 4.0: Bussysteme— Industrial Ethernet—Mobile Kommunikation—Cyber-Physical Systems; Hanser: New York, NY, USA, 2021. [Google Scholar]
- OASIS. Reference Model for Service Oriented Architecture v1.0. 2006. Available online: http://docs.oasis-open.org/soa-rm/v1.0/soa-rm.html (accessed on 27 January 2022).
- Nollert, G.; Hartkens, T.; Figel, A.; Bulitta, C.; Altenbeck, F.; Gerhar, V. The Hybrid Operating Room. In Special Topics in Cardiac Surgery; Narin, C., Ed.; InTech: Vienna, Austria, 2012. [Google Scholar] [CrossRef]
- Getinge. Hybrid OR: Engineering Success. Pioneering Healthcare. 2022. Available online: https://www.getinge.com/int/products-and-solutions/operating-room/hybrid-and-imaging-or/siemens/ (accessed on 12 September 2022).
- Puder, A.; Henle, J.; Rumez, M.; Vetter, A. A Mixed E/E-Architecture for Interconnected Operating Tables Inspired by the Automotive Industry. In Proceedings of the International Symposium on Medical Robotics, Atlanta, GA, USA, 13–15 April 2022. [Google Scholar]
- Getinge. Hybrid OR: Engineering Success. Pioneering Healthcare. 2021. Available online: https://www2.getinge.com/de/loesungen/operationssaal/hybrid-op/siemens/ (accessed on 12 September 2022).
- Getinge. Maquet Magnus Operating Table System. 2021. Available online: https://www.getinge.com/dam/hospital/documents/english/magnus_care_supporter_brochure-en-non_us.pdf (accessed on 12 September 2022).
- Goldman, J.M.; Schrenker, R.A.; Jackson, J.L.; Whitehead, S.F. Plug-and-Play in the OperatingRoom of the Future. Biomed. Instrum. Technol. 2005, 39, 194–199. [Google Scholar]
- ASTM. Medical Devices and Medical Systems: Essential Safety Requirements for Equipment Comprising the Patient-Centric Integrated Clinical Environment (ICE)—Part 1: General Requirements and Conceptual Model. 2013. Available online: http://www.astm.org/Standards/F2761.htm (accessed on 10 August 2022).
- Arney, D.; Plourde, J.; Goldman, J.M. OpenICE medical device interoperability platform overview and requirement analysis. Biomed. Technik. Biomed. Eng. 2018, 63, 39–47. [Google Scholar] [CrossRef]
- Pfeiffer, J.H.; Dingler, M.E.; Dietz, C.; Lueth, T.C. Requirements and architecture design for open real-time communication in the operating room. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; 2015; pp. 458–463. [Google Scholar] [CrossRef]
- Kasparick, M. Zuverlässige und herstellerübergreifende Medizingeräteinteroperabilität & Beiträge zur IEEE 11073 SDC-Normenfamilie. Ph.D. Thesis, Universität Rostock, Rostock, Germany, 2020. [Google Scholar] [CrossRef]
- 11073-20702-2018; Health informatics-Point-of Care Medical Device Communication: Part 20702: Medical Devices Communication Profile forWeb Services. IEEE Standards Association: Piscataway, NJ, USA, 2018.
- P11073-10418/D15; Health Informatics—Personal Health Device Communication: Part 10207: Domain Information and Service Model for Service-Oriented Point-Ofcare Medical Device Communication. ISO/IEEE: Piscataway, NJ, USA, 2019.
- Okamoto, J.; Masamune, K.; Iseki, H.; Muragaki, Y. Development concepts of a Smart Cyber Operating Theater (SCOT) using ORiN technology. Biomed. Technik. Biomed. Eng. 2018, 63, 31–37. [Google Scholar] [CrossRef]
- Sun, X.; Okamoto, J.; Masamune, K.; Muragaki, Y. Robotic Technology in Operating Rooms: A Review. Curr. Robot. Rep. 2021, 2, 333–341. [Google Scholar] [CrossRef] [PubMed]
- Berger, J.; Rockstroh, M.; Schreiber, E.; Yoshida, Y.; Okamoto, J.; Masamune, K.; Muragaki, Y.; Neumuth, T. GATOR: Connecting integrated operating room solutions based on the IEEE 11073 SDC and ORiN standards. Int. J. Comput. Assist. Radiol. Surg. 2019, 14, 2233–2243. [Google Scholar] [CrossRef] [PubMed]
- AUTOSAR Foundation. SOME/IP Protocol Specification: Release 1.1.0; Document ID 696; AUTOSAR Foundation: Munich, Germany, 2017. [Google Scholar]
- Object Management Group. Data Distribution Service (DDS): Version 1.4. 2015. Available online: http://www.omg.org/spec/DDS/1.4 (accessed on 20 August 2022).
- RTI Healthcare & Medical Connectivity and Autonomous System Software. 18 February 2022. Available online: https://www.rti.com/industries/healthcare (accessed on 19 February 2022).
- Object Management Group. RPC Over DDS (DDS-RPC): Version 1.0. 2017. Available online: http://www.omg.org/spec/DDS-RPC/1.0 (accessed on 20 August 2022).
- Javdani, H.; Kashanian, H. Internet of things in medical applications with a service-oriented and security approach: A survey. Health Technol. 2018, 8, 39–50. [Google Scholar] [CrossRef]
- Leucker, M.; Schmitz, M. Secured SOA for the Safe Interconnection of Medical Devices (Position Paper). In Proceedings of the Gemeinsamer Tagungsband der Workshops der Tagung Software Engineering 2015, Dresden, Germany, 17–18 March 2015; Volume CEUR-WS 1337. [Google Scholar]
- Arney, D.; Venkatasubramanian, K.K.; Sokolsky, O.; Lee, I. Biomedical devices and systems security. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; Volume 2011, pp. 2376–2379. [Google Scholar] [CrossRef]
- Staschulat, J.; Lütkebohle, I.; Lange, R. The rclc Executor: Domain-specific deterministic scheduling mechanisms for ROS applications on microcontrollers: Work-in-progress. In Proceedings of the 2020 International Conference on Embedded Software (EMSOFT), Shanghai, China, 20–25 September 2020; pp. 18–19. [Google Scholar] [CrossRef]
- Kampmann, A.; Wüstenberg, A.; Alrifaee, B.; Kowalewski, S. A Portable Implementation of the Real-Time Publish-Subscribe Protocol for Microcontrollers in Distributed Robotic Applications. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 443–448. [Google Scholar] [CrossRef]
- Kreissl, J. Absicherung der SOME/IP Kommunikation bei Adaptive AUTOSAR. Master’s Thesis, Universität Stuttgart, Stuttgart, Germany, 2017. [Google Scholar]
- Weschke, J.; Hesslund, F. Testing and Evaluation to Improve Data Security of Automotive Embedded Systems. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2011. [Google Scholar]
- Gehrmann, T.; Duplys, P. Intrusion Detection for SOME/IP: Challenges and Opportunities. In Proceedings of the 2020 23rd Euromicro Conference on Digital System Design (DSD), Kranj, Slovenia, 26–28 August 2020; pp. 583–587. [Google Scholar] [CrossRef]
- Iorio, M.; Reineri, M.; Risso, F.; Sisto, R.; Valenza, F. Securing SOME/IP for In-Vehicle Service Protection. IEEE Trans. Veh. Technol. 2020, 69, 13450–13466. [Google Scholar] [CrossRef]
- Schindewolf, M.; Stoll, H.; Guissouma, H.; Puder, A.; Sax, E.; Vetter, A.; Rumez, M.; Henle, J. A Comparison of Architecture Paradigms for Dynamic Reconfıgurable Automotive Networks. In Proceedings of the 2022 International Conference on Connected Vehicle and Expo (ICCVE), Lakeland, FL, USA, 7–9 March 2022; pp. 1–7. [Google Scholar] [CrossRef]
- El Mrabet, Z.; Kaabouch, N.; El Ghazi, H.; El Ghazi, H. Cyber-security in smart grid: Survey and challenges. Comput. Electr. Eng. 2018, 67, 469–482. [Google Scholar] [CrossRef]
- Pliatsios, D.; Sarigiannidis, P.; Lagkas, T.; Sarigiannidis, A.G. A Survey on SCADA Systems: Secure Protocols, Incidents, Threats and Tactics. IEEE Commun. Surv. Tutor. 2020, 22, 1942–1976. [Google Scholar] [CrossRef]
- Baker, T.; Mackay, M.; Shaheed, A.; Aldawsari, B. Security-Oriented Cloud Platform for SOA-Based SCADA. In Proceedings of the 2015 15th IEEE/ACM International Symposium 2015, Shenzhen, China, 4–7 May 2015; pp. 961–970. [Google Scholar] [CrossRef]
- Najjar, M.S.; Abdollahi Azgomi, M. A distributed multi-approach intrusion detection system for web services. In Proceedings of the the 3rd International Conference on Security of Information and Networks, Russian Federation, 7–11 September 2010; Makarevich, O., Ed.; ACM: New York, NY, USA, 2010; p. 238. [Google Scholar] [CrossRef]
- Carta, S.; Podda, A.S.; Recupero, D.R.; Saia, R. A Local Feature Engineering Strategy to Improve Network Anomaly Detection. Future Internet 2020, 12, 177. [Google Scholar] [CrossRef]
- Kao, M.T.; Sung, D.Y.; Kao, S.J.; Chang, F.M. A Novel Two-Stage Deep Learning Structure for Network Flow Anomaly Detection. Electronics 2022, 11, 1531. [Google Scholar] [CrossRef]
- Jiang, J.R.; Kao, J.B.; Li, Y.L. Semi-Supervised Time Series Anomaly Detection Based on Statistics and Deep Learning. Appl. Sci. 2021, 11, 6698. [Google Scholar] [CrossRef]
- Khalid, F.; Rehman, S.; Shafique, M. Overview of Security for Smart Cyber-Physical Systems. In Security of Cyber-Physical Systems; Karimipour, H., Srikantha, P., Farag, H., Wei-Kocsis, J., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 5–24. [Google Scholar] [CrossRef]
- Hofmockel, J. Anomalieerkennung in Kommunikationsdaten zur Datenselektion im Fahrzeug; Karlsruher Institut für Technologie: Karlsruhe, Germany, 2019. [Google Scholar] [CrossRef]
- Arney, D.; Goldman, J.M.; Whitehead, S.; Lee, I. Synchronizing an X-Ray and Anesthesia Machine Ventilator: A Medical Device Interoperability Case Study. In Proceedings of the International Conference on Biomedical Electronics and Devices; SciTePress—Science and and Technology Publications: Porto, Portugal, 2009; pp. 52–60. [Google Scholar] [CrossRef]
- Wolsing, K.; Wagner, E.; Henze, M. Facilitating Protocol-Independent Industrial Intrusion Detection Systems. In Proceedings of the 2020 ACM SIGSAC Conference on Computer and Communications Security, Virtual, 9–13 November 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 2105–2107. [Google Scholar] [CrossRef]
- Weber, M.; Pistorius, F.; Sax, E.; Maas, J.; Zimmer, B. A Hybrid Anomaly Detection System for Electronic Control Units Featuring Replicator Neural Networks. In Advances in Information and Communication Networks; Advances in Intelligent Systems and Computing; Arai, K., Kapoor, S., Bhatia, R., Eds.; Springer International Publishing: Cham, Switzerland, 2019; Volume 887, pp. 43–62. [Google Scholar] [CrossRef]
- Rumez, M.; Lin, J.; Fuchß, T.; Kriesten, R.; Sax, E. Anomaly Detection for Automotive Diagnostic Applications Based on N-Grams. In Proceedings of the 2020 IEEE 44th Annual Computers, Software, and Applications Conference (COMPSAC), Madrid, Spain, 13–17 July 2020; pp. 1423–1429. [Google Scholar]
- Grimm, D.; Sax, E. Context-aware vehicle and fleet security combining a Knowledge Graph and an object-oriented model. In Proceedings of the 2022 International Conference on Connected Vehicle and Expo (ICCVE), Lakeland, FL, USA, 7–9 March 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Hillrom Holding. Robotic Operating Rooms. 28 January 2022. Available online: https://www.hillrom.com/en/surgical-strategic-alliances/robotic-operating-rooms/ (accessed on 6 February 2022).
- Maruyama, Y.; Kato, S.; Azumi, T. Exploring the performance of ROS2. In Proceedings of the 13th International Conference on Embedded Software, Chengdu, China, 13–14 August 2016; ACM: New York, NY, USA, 2016; pp. 1–10. [Google Scholar] [CrossRef]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), Sendai, Japan, 28 September–2 October 2004; pp. 2149–2154. [Google Scholar] [CrossRef]
- Kasparick, M.; Schmitz, M.; Andersen, B.; Rockstroh, M.; Franke, S.; Schlichting, S.; Golatowski, F.; Timmermann, D. OR.NET: A service-oriented architecture for safe and dynamic medical device interoperability. Biomed. Technik. Biomed. Eng. 2018, 63, 11–30. [Google Scholar] [CrossRef] [PubMed]
- Schlichting, S.; Gregorczyk, D.; Andersen, B. OpenSDC Library. 21 February 2022. Available online: https://sourceforge.net/projects/opensdc/ (accessed on 7 March 2022).
- Sendelbach, S.; Funk, M. Alarm Fatigue. AACN Adv. Crit. Care 2013, 24, 378–386. [Google Scholar] [CrossRef] [PubMed]
- Holmes, D.; Papathanasaki, M.; Maglaras, L.; Ferrag, M.A.; Nepal, S.; Janicke, H. Digital Twins and Cyber Security—Solution or challenge? In Proceedings of the 2021 6th South-East Europe Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Preveza, Greece, 24–26 September 2021; pp. 1–8. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern | SDC | SOME/IP | DDS |
|---|---|---|---|
| publish/subscribe (1-N) | publish/subscribe (e.g., Description Event Service, State Event Service) | event, field | / |
| request/response (1-1) | request/response (e.g., Get/Set Service), Context Service | request/response, fire/forget | 2x Topic with DDS-RPC |
| stream (N-M) | streaming (e.g., Waveform Service) | / | Topic |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Puder, A.; Rumez, M.; Grimm, D.; Sax, E. Generic Patterns for Intrusion Detection Systems in Service-Oriented Automotive and Medical Architectures. J. Cybersecur. Priv. 2022, 2, 731-749. https://0-doi-org.brum.beds.ac.uk/10.3390/jcp2030037
Puder A, Rumez M, Grimm D, Sax E. Generic Patterns for Intrusion Detection Systems in Service-Oriented Automotive and Medical Architectures. Journal of Cybersecurity and Privacy. 2022; 2(3):731-749. https://0-doi-org.brum.beds.ac.uk/10.3390/jcp2030037
Chicago/Turabian StylePuder, Andreas, Marcel Rumez, Daniel Grimm, and Eric Sax. 2022. "Generic Patterns for Intrusion Detection Systems in Service-Oriented Automotive and Medical Architectures" Journal of Cybersecurity and Privacy 2, no. 3: 731-749. https://0-doi-org.brum.beds.ac.uk/10.3390/jcp2030037