
Electrified Powertrain with Multiple Planetary Gears and Corresponding Energy Management Strategy

 , ,
, ,
Abstract
:1. Introduction
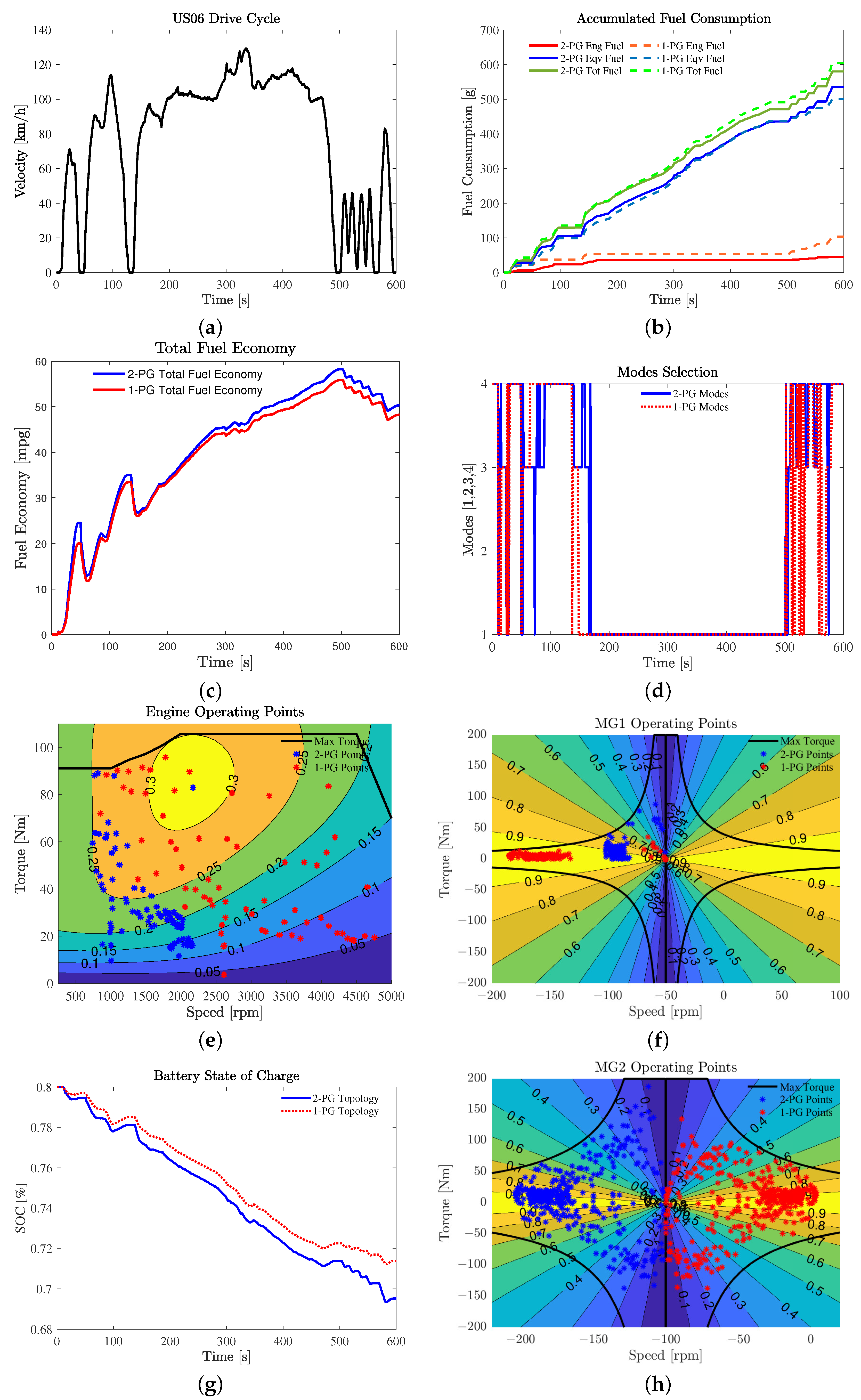
- Comprehensive investigation of the effects of multiple PGs on the performance of the electrified vehicles. It is shown that increasing the number of PGs from one to two improves fuel economy by 4%.
- Development of an optimal EMS for the electrified powertrains with multiple PGs, to distribute torque demands amongst power components, as well as to simultaneously select the mode of operation of gearbox.
- Development of a solver for the resulting mixed-integer EMS using NEOS server.
2. System Description
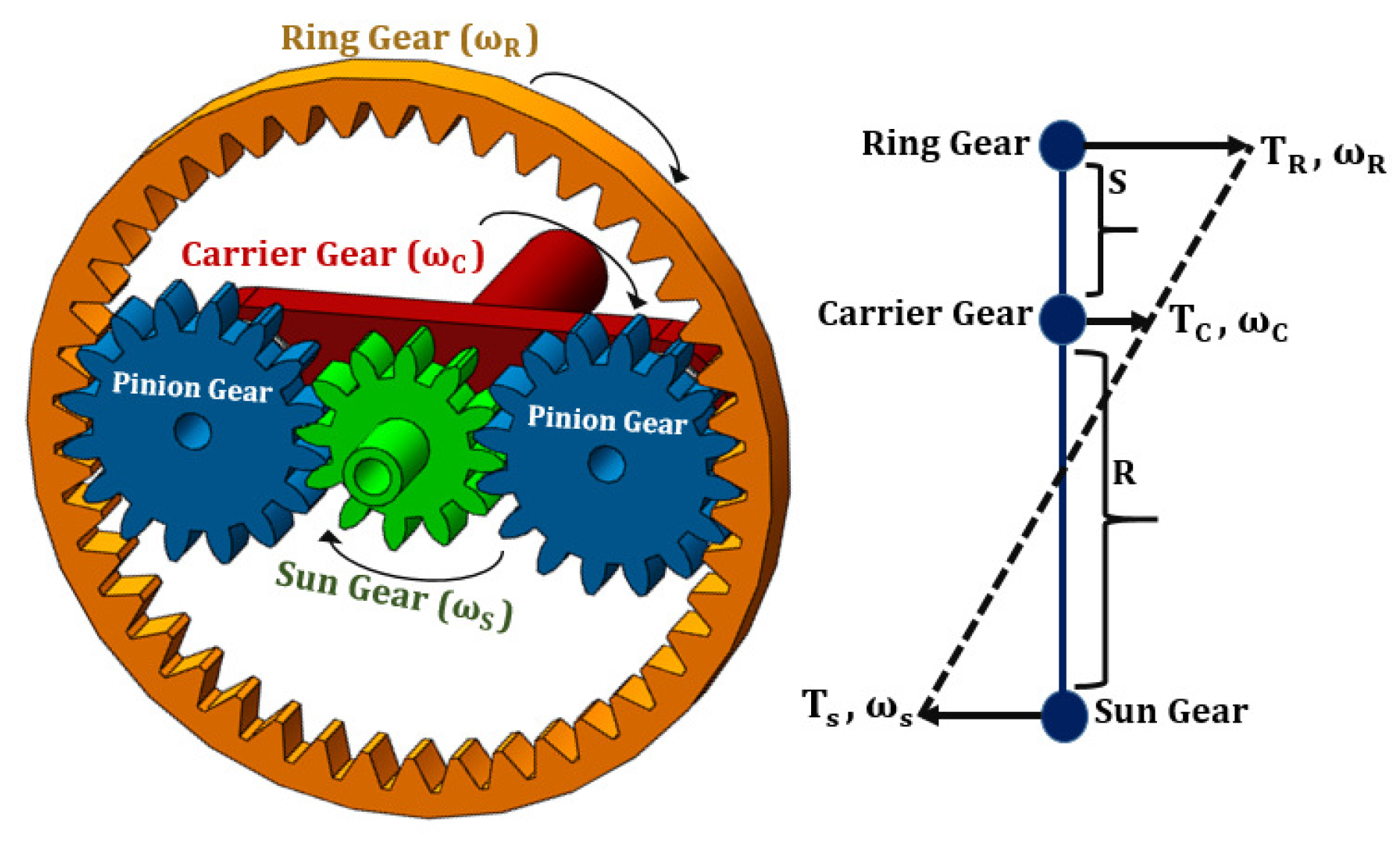
2.1. Planetary Gearbox
2.2. Electric Motors
2.3. Engine
2.4. Battery
3. Modes for the Drivetrain with Multiple Planetary Gears
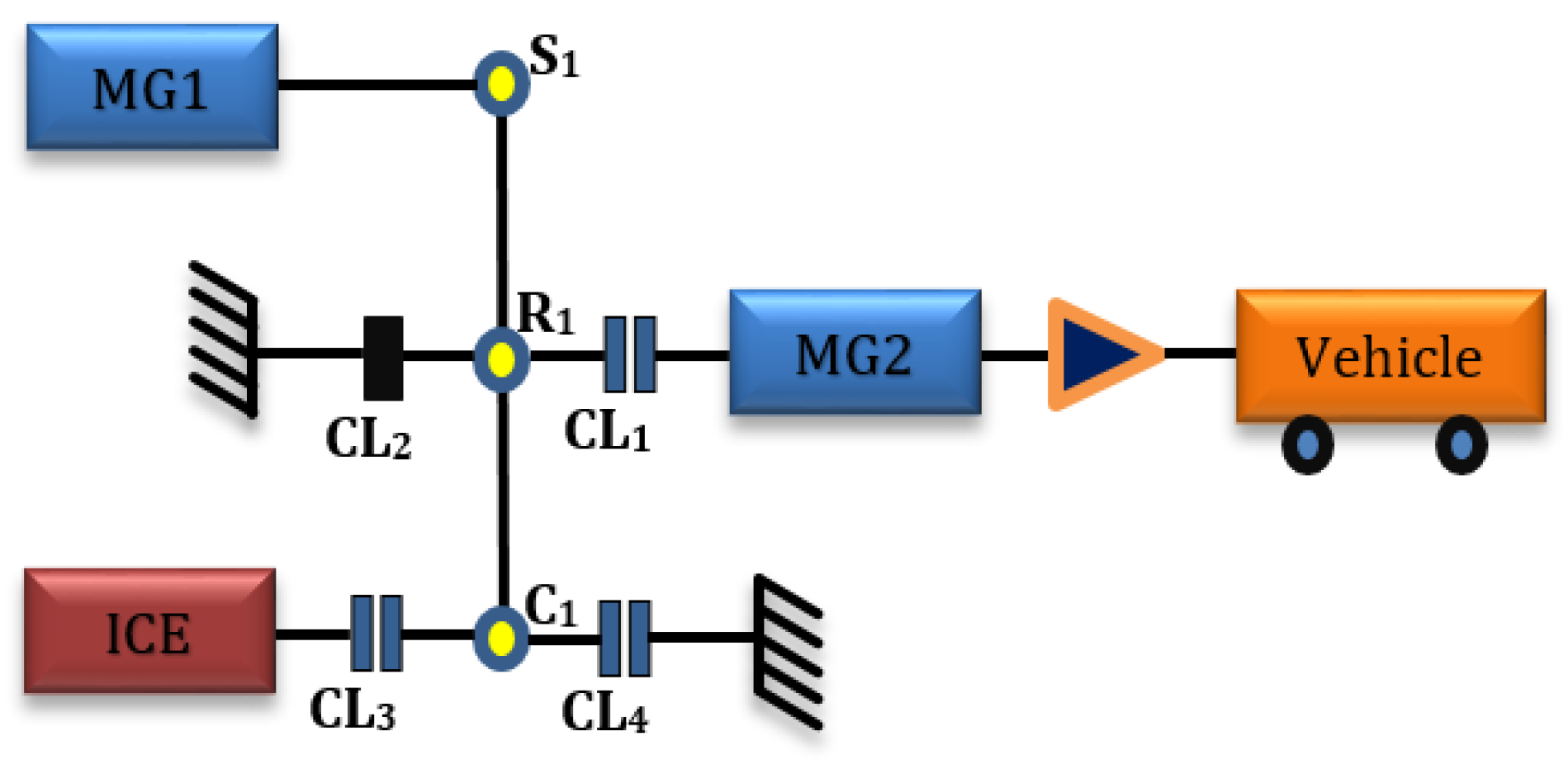
3.1. Drivetrain with 1PG
- Mode 1 (2EV Mode) is realised by engaging clutch 1 (CL) and CL whilst disengaging CL and CL. Using automated modelling, the mode dynamics for Mode 1 is as shown in Equation (10).
- Mode 3 (Input Split Mode) is realised by engaging CL and CL whilst disengaging CL and CL. The mode dynamics for Mode 3 is as shown in Equation (13).
- Mode 4 (1EV Mode) is realised by engaging CL and CL whilst disengaging CL and CL. In this mode, only MG2 is engaged to the differential via CL1, and therefore a simple equation can represent the mode dynamics as shown in Equation (14).
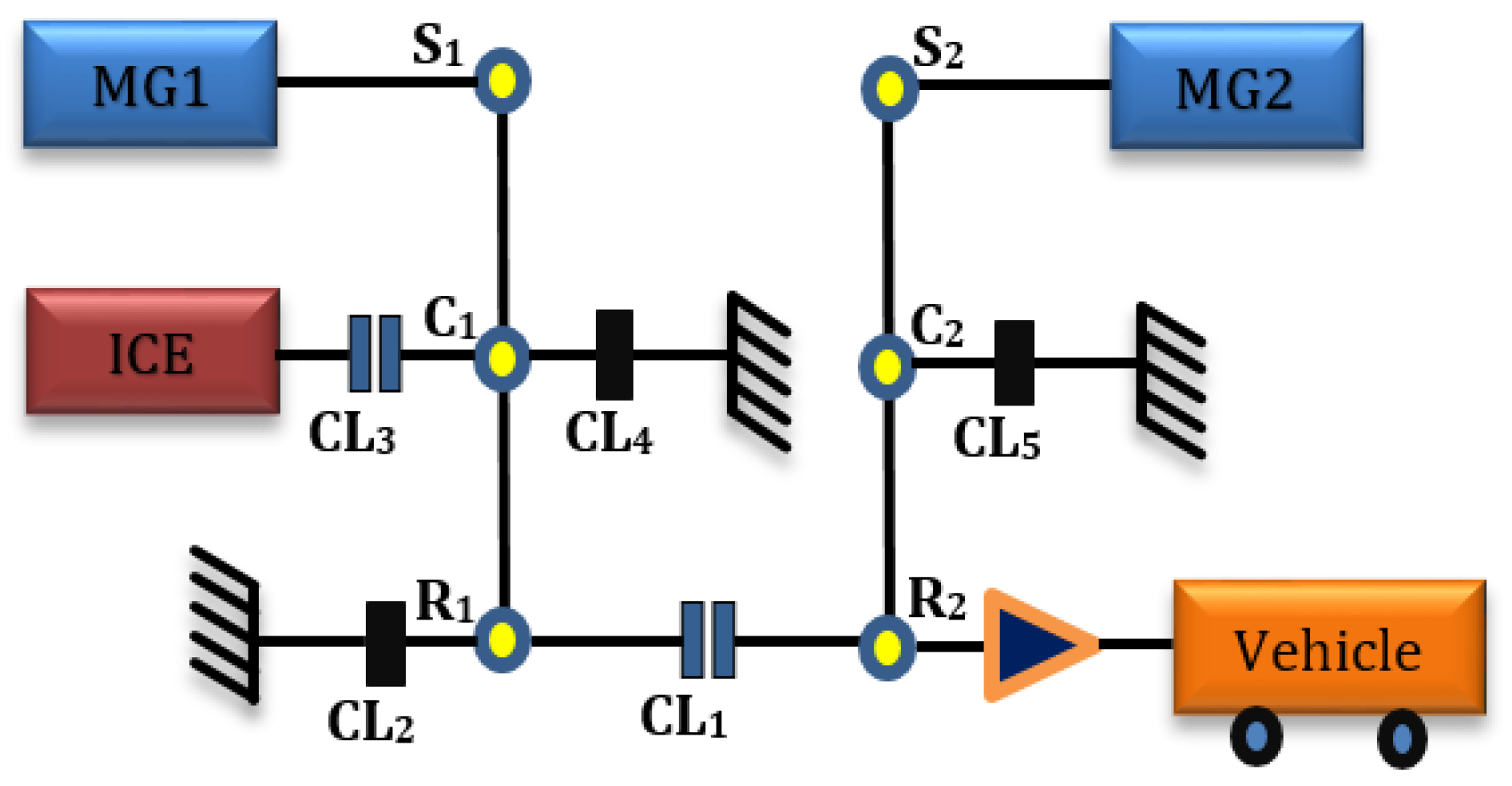
3.2. Drivetrain with 2PG
- Mode 1 (2EV Mode) is realised by engaging CL, CL, CL, CL whilst disengaging CL. The mode dynamics for Mode 1 is as shown in Equation (15).
- Mode 3 (Input Split Mode) is realised by engaging CL, CL and CL and disengaging CL and CL. The mode dynamics for Mode 3 is as shown in Equation (18).
- Mode 4 (1EV Mode) is realised by disengaging and engaging CL, CL & CL and disengaging CL & CL. The mode dynamics for Mode 4 is as shown in Equation (19).
4. Energy Management Strategy with Mode Selection
4.1. EMS Formulation
4.1.1. Objective Function
4.1.2. Constraints
4.1.3. Optimal Control Problem of the Developed EMS
5. Simulation Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Abbreviations
| Radius of tyre | |
| Engine fuel consumption | |
| Brake specific fuel consumption | |
| Equivalent fuel consumption | |
| Total fuel consumption | |
| Angular velocity of ring gear | |
| Angular velocity of sun gear | |
| Angular velocity of carrier gear | |
| Angular velocity of output shaft | |
| Torque of motor generator 1 | |
| Torque of motor generator 2 | |
| Torque of engine | |
| Efficiency of motor generator 1 | |
| Efficiency of motor generator 2 | |
| Brake thermal efficiency of engine | |
| Torque requested by vehicle | |
| m | Mass of vehicle |
| Torque constant MG2 | |
| Torque constant MG1 | |
| MG2 Resistance | |
| MG1 Resistance | |
| Battery power | |
| Mode | |
| Inertia of powertrain components | |
| Angular velocity of powertrain components | |
| Radius of ring gear of i-PG Topology | |
| Radius of sun gear of i-PG Topology | |
| Internal force acting between gears of i-PG Topology | |
| State of charge | |
| k | Time interval (1 s) |
| q | Fuel flow rate of engine |
| Density of gasoline | |
| Calorific value of gasoline | |
| Motor states −1 for motoring and 0 for regeneration |
Appendix A. Deriving an Equation for Mass Flow Rate per Cycle of Fuel of Engine
References
- Thomas Parry, S.R. Vehicle Licensing Statistics: 2020 Quarter 3 (Jul-Sep); Department of Transport: London, UK, 2020. [Google Scholar]
- Wegener, M.; Plum, T.; Eisenbarth, M.; Andert, J. Energy saving potentials of modern powertrains utilizing predictive driving algorithms in different traffic scenarios. J. Automob. Eng. 2020, 234, 992–1005. [Google Scholar] [CrossRef]
- Eisenbarth, M.; Wegener, M.; Scheer, R.; Andert, J.; Buse, D.S.; Klingler, F.; Sommer, C.; Dressler, F.; Reinold, P.; Gries, R. Toward Smart Vehicle-to-Everything Connected Powertrains: Driving real component test benches in a fully interactive virtual smart city. IEEE Veh. Technol. Mag. 2020, 16, 75–82. [Google Scholar] [CrossRef]
- Sieg, C.; Küçükay, F. Benchmarking of Dedicated Hybrid Transmissions. Vehicles 2020, 2, 100–125. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Jiang, J.; Zheng, L.; Tang, H.; Chen, X. Study and Analysis of a Multi-Mode Power Split Hybrid Transmission. World Electr. Veh. J. 2020, 11, 46. [Google Scholar] [CrossRef]
- Duhon, A.N.; Sevel, K.S.; Tarnowsky, S.A.; Savagian, P.J. Chevrolet Volt Electric Utilization. SAE Int. J. Altern. Powertrains 2015, 4, 269–276. [Google Scholar] [CrossRef]
- Liu, J.; Peng, H. A systematic design approach for two planetary gear split hybrid vehicles. Veh. Syst. Dyn. 2010, 48, 1395–1412. [Google Scholar] [CrossRef]
- Zhang, X.; Li, S.E.; Peng, H.; Sun, J. Efficient Exhaustive Search of Power-Split Hybrid Powertrains With Multiple Planetary Gears and Clutches. J. Dyn. Syst. Meas. Control. 2015, 137. [Google Scholar] [CrossRef]
- Conlon, B.M.; Blohm, T.; Harpster, M.; Holmes, A.; Palardy, M.; Tarnowsky, S.; Zhou, L. The Next Generation “Voltec” Extended Range EV Propulsion System. SAE Int. J. Altern. Powertrains 2015, 4, 248–259. [Google Scholar] [CrossRef]
- Zhang, X.; Peng, H.; Sun, J. A near-optimal power management strategy for rapid component sizing of multimode power split hybrid vehicles. IEEE Trans. Control. Syst. Technol. 2015, 23, 609–618. [Google Scholar] [CrossRef]
- Zhuang, W.; Zhang, X.; Li, D.; Wang, L.; Yin, G. Mode shift map design and integrated energy management control of a multi-mode hybrid electric vehicle. Appl. Energy 2017, 204, 476–488. [Google Scholar] [CrossRef]
- Anselma, P.G.; Huo, Y.; Amin, E.; Roeleveld, J.; Emadi, A.; Belingardi, G. Mode-shifting Minimization in a Power Management Strategy for Rapid Component Sizing of Multimode Power Split Hybrid Vehicles. SAE Tech. Pap. Ser. SAE Int. 2018. [Google Scholar] [CrossRef] [Green Version]
- Sorrentino, M.; Rizzo, G.; Arsie, I. Analysis of a rule-based control strategy for on-board energy management of series hybrid vehicles. Control. Eng. Pract. 2011, 19, 1433–1441. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, J.; Zhang, H.; Yin, C. Fuzzy Energy Management Optimization for a Parallel Hybrid Electric Vehicle using Chaotic Non-dominated sorting Genetic Algorithm. Automatika 2015, 56, 149–163. [Google Scholar] [CrossRef] [Green Version]
- Gupta, V. ECMS based hybrid algorithm for energy management in parallel hybrid electric vehicles. HCTL Open Int. J. Technol. Innov. Res. (IJTIR) 2015, 14, 1814–2321. [Google Scholar]
- Paganelli, G.; Delprat, S.; Guerra, T.M.; Rimaux, J.; Santin, J.J. Equivalent consumption minimization strategy for parallel hybrid powertrains. In Proceedings of the Vehicular Technology Conference. IEEE 55th Vehicular Technology Conference, VTC Spring 2002 (Cat. No. 02CH37367), Birmingham, AL, USA, 6–9 May 2002; Volume 4, pp. 2076–2081. [Google Scholar]
- Paganelli, G.; Tateno, M.; Brahma, A.; Rizzoni, G.; Guezennec, Y. Control development for a hybrid-electric sport-utility vehicle: Strategy, implementation and field test results (I). In Proceedings of the American Control Conference, Arlington, VA, USA, 25–27 June 2001; Volume 2, p. 5064. [Google Scholar]
- Brahma, A.; Guezennec, Y.; Rizzoni, G. Optimal energy management in series hybrid electric vehicles. In Proceedings of the 2000 American Control Conference. ACC (IEEE Cat. No.00CH36334), Chicago, IL, USA, 28–30 June 2000. [Google Scholar] [CrossRef]
- Zhang, Y.; Chu, L.; Fu, Z.; Guo, C.; Zhao, D.; Li, Y.; Ou, Y.; Xu, L. An improved adaptive equivalent consumption minimization strategy for parallel plug-in hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 233, 1649–1663. [Google Scholar] [CrossRef]
- Hu, Y.; Li, W.; Xu, K.; Zahid, T.; Qin, F.; Li, C. Energy Management Strategy for a Hybrid Electric Vehicle Based on Deep Reinforcement Learning. Appl. Sci. 2018, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Xiong, R.; Sun, F. Model predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage system. Appl. Energy 2017, 185, 1654–1662. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, L.; Coskun, S.; Pang, H.; Cui, Y.; Xi, J. Energy Management Strategies for Hybrid Electric Vehicles: Review, Classification, Comparison, and Outlook. Energies 2020, 13, 3352. [Google Scholar] [CrossRef]
- Benford, H.L.; Leising, M.B. The Lever Analogy: A New Tool in Transmission Analysis. SAE Tech. Pap. Ser. SAE Int. 1981. [Google Scholar] [CrossRef]
- Fourer, R.; Gay, D.M.; Kernighan, B.W. AMPL: A Modeling Language for Mathematical Programming; Cengage Learning: Boston, MA, USA, 2002. [Google Scholar]
- Biegler, L.T. Nonlinear Programming; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2010. [Google Scholar] [CrossRef]
- Gay David, M. Hooking your Solver to Ampl; Computing Sciences Research Center Bell Laboratories: Murray Hill, NJ, USA, 1997. [Google Scholar]
- Byrd, R.H.; Jorge, N.; Richard, A.W. Knitro: An integrated package for nonlinear optimization. In Large Scale Nonlinear Optimization; Springer: Boston, MA, USA, 2006; Volume 35. [Google Scholar]
- Dolan, E.D.; Fourer, R.; Goux, J.P.; Munson, T.S.; Sarich, J. Kestrel: An Interface from Optimization Modeling Systems to the NEOS Server. Informs J. Comput. 2008, 20, 525–538. [Google Scholar] [CrossRef] [Green Version]
- Czyzyk, J.; Mesnier, M.P.; More, J.J. The NEOS Server. IEEE Comput. Sci. Eng. 1998, 5, 68–75. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component Name | Parameters (Maximum Values) |
|---|---|
| Internal Combustion Engine (ICE) | 50 kW at 4500 rpm, 105 Nm at 2000 rpm |
| Motor Generator 2 (MG2) | 60 kW, Nm, ±13,000 rpm |
| Motor Generator 1 (MG1) | 42 kW, Nm, ±30,000 rpm |
| Battery | 27 kWh |
| PG1 (R:S) | 2:6 |
| PG2 (R:S) | 2:6 |
| PG2 (R:S) | 2:63 |
| Differential Gear Ratio(D) | 3.95 |
| Vehicle Mass (m) | 1450 kg |
| Tyre Radius (r) | 0.33 m |
| Mode | Represented as | Mode Classification |
|---|---|---|
| 1 | M | 2EV Mode |
| 2 | M | Series Mode |
| 3 | M | Input Split Mode |
| 4 | M | 1EV Mode |
| Description | 1-PG Topology Values | 2-PG Topology Values |
|---|---|---|
| Total Engine Fuel Consumption | 103.3 g | 44.9 g |
| Total Equivalent Fuel Consumption | 501.3 g | 535.2 g |
| Total Fuel Consumption | 604.6 g | 579.8 g |
| Total Fuel Economy | 48.2 mpg | 50.3 mpg |
| Battery SoC at the end of cycle | 71.4% | 69.5% |
| Torque Tracking error | 13.2 Nm | 11.4 Nm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rajput, D.; Herreros, J.M.; Innocente, M.S.; Schaub, J.; Dizqah, A.M. Electrified Powertrain with Multiple Planetary Gears and Corresponding Energy Management Strategy. Vehicles 2021, 3, 341-356. https://0-doi-org.brum.beds.ac.uk/10.3390/vehicles3030021
Rajput D, Herreros JM, Innocente MS, Schaub J, Dizqah AM. Electrified Powertrain with Multiple Planetary Gears and Corresponding Energy Management Strategy. Vehicles. 2021; 3(3):341-356. https://0-doi-org.brum.beds.ac.uk/10.3390/vehicles3030021
Chicago/Turabian StyleRajput, Daizy, Jose M. Herreros, Mauro S. Innocente, Joschka Schaub, and Arash M. Dizqah. 2021. "Electrified Powertrain with Multiple Planetary Gears and Corresponding Energy Management Strategy" Vehicles 3, no. 3: 341-356. https://0-doi-org.brum.beds.ac.uk/10.3390/vehicles3030021