Node Distribution Optimization in Positioning Sensor Networks through Memetic Algorithms in Urban Scenarios †






Abstract
:1. Introduction
2. Cramèr-Rao Bound for the TDOA Architecture
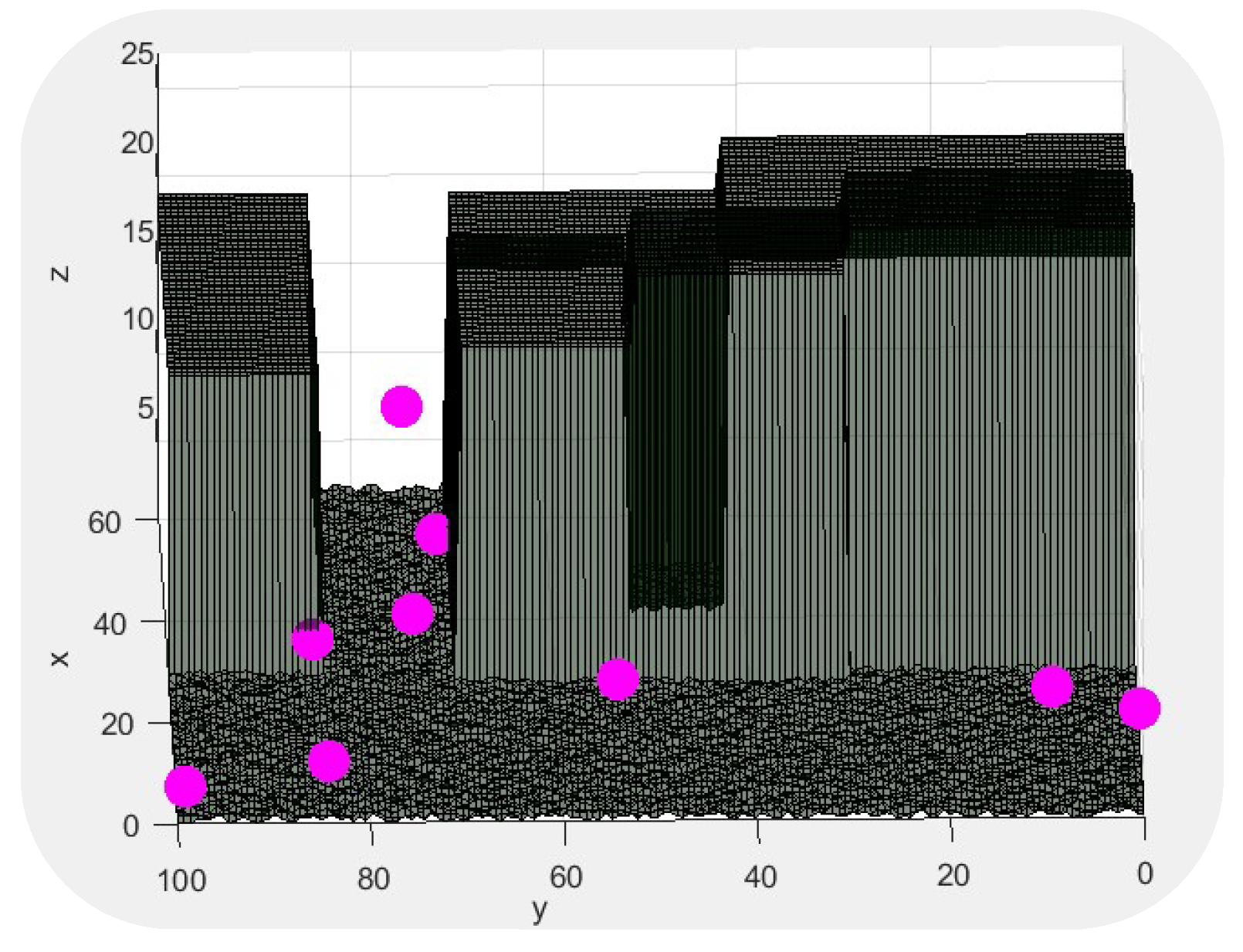
3. The Scenario of Simulations
4. Memetic Algorithm
Variable-Neighborhood Descent Local Search
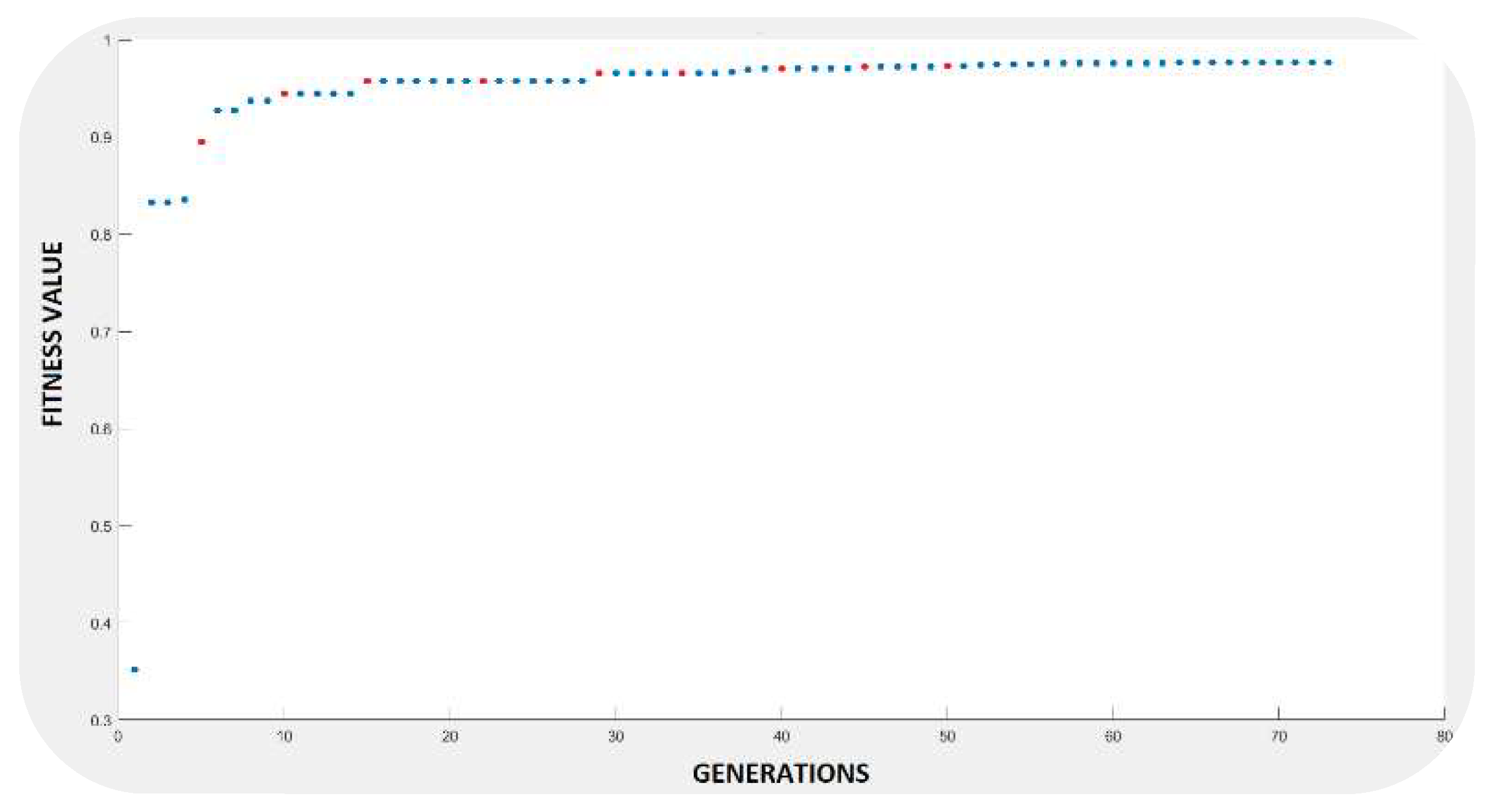
5. Results
6. Conclusions
References
- Kolodziej, K.W.; Hjelm, J. Local Positioning Systems: LBS Applications and Services, 1st ed.; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Vossiek, M.; Wiebking, L.; Gulden, P.; Wieghardt, J.; Hofmann, C.; Heide, P. Wireless Local Positioning. IEEE Microw. Mag. 2003, 4, 77–86. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Dogancay, K. Optimal Geometry Analysis for Multistatic TOA Localization. IEEE Trans. Sig. Process. 2016, 64, 4180–4193. [Google Scholar] [CrossRef]
- Yang, L.; Ho, K.C. An Approximately Efficient TDOA Localization Algorithm in Closed-Form for Locating Multiple Disjoint Sources with Erroneous Sensor Positions. IEEE Trans. Sig. Process. 2009, 57, 4598–4615. [Google Scholar] [CrossRef]
- He, S.; Dong, X. High-Accuracy Localization Platform Using Asynchronous Time Difference of Arrival Technology. IEEE Trans. Instrum. Meas. 2017, 66, 1728–1742. [Google Scholar] [CrossRef]
- Álvarez, R.; Díez-González, J.; Sánchez-Gonzalez, L.; Perez, H. Combined Noise and Clock CRLB Error Model for the Optimization of Node Location in Time Positioning Systems. IEEE Access 2020, 8, 31910–31919. [Google Scholar]
- Díez-González, J.; Álvarez, R.; Sánchez-Gonzalez, L.; Fernández-Robles, L.; Perez, H.; Castejón-Limas, M. 3D Tdoa Problem Solution with Four Receiving Nodes. Sensors 2019, 19, 2892. [Google Scholar] [CrossRef] [PubMed]
- Díez-González, J.; Álvarez, R.; Perez, H. Optimized Cost-Effective Node Deployments in Asynchronous Time Local Positioning Systems. IEEE Access 2020, 8, 154671–154682. [Google Scholar] [CrossRef]
- Tekdas, O.; Isler, V. Sensor placement for triangulation-based localization. IEEE Trans. Autom. Sci. Eng. 2010, 7, 681–685. [Google Scholar] [CrossRef]
- Kannadasan, K.; Edla, D.R.; Konga, M.C.; Kuppili, V. M-curves path planning model for mobile anchor node and localization of sensor nodes using dolphin swarm algorithm. Wirel. Netw. 2019, 26, 2769–2783. [Google Scholar] [CrossRef]
- Correia, S.D.; Beko, M.; Da Silva Cruz, L.A.; Tomic, S. Elephant herding optimization for energy-based localization. Sensors 2018, 18, 2849. [Google Scholar] [CrossRef] [PubMed]
- Xue, W.; Jun-Jie, M.; Sheng, W.; Dao-Wei, B. Distributed particle swarm optimization and simulated annealing for energy-efficient coverage in wireless sensor networks. Sensors 2007, 7, 628–648. [Google Scholar] [CrossRef]
- Díez-González, J.; Álvarez, R.; González-Bárcena, D.; Sánchez-Gonzalez, L.; Castejón-Limas, M.; Perez, H. Genetic Algorithm Approach to the 3D Node Localization in TDOA Systems. Sensors 2019, 19, 3880. [Google Scholar] [CrossRef] [PubMed]
- Díez-González, J.; Verde, P.; Ferrero-Guillén, R.; Álvarez, R.; Pérez, H. Hybrid Memetic Algorithm for the Node Location Problem in Local Positioning Systems. Sensors 2020, 20, 5475. [Google Scholar] [CrossRef] [PubMed]
- Kaune, R. Accuracy studies for TDOA and TOA localization. In Proceedings of the 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; IEEE: Piscataway Township, NJ, USA, 2012. [Google Scholar]
- Huang, B.; Xie, L.; Yang, Z. TDOA-based source localization with distance-dependent noises. IEEE Trans. Wirel. Commun. 2014, 14, 468–480. [Google Scholar] [CrossRef]
- Álvarez, R.; Díez-González, J.; Alonso, E.; Fernández-Robles, L.; Castejón-Limas, M.; Perez, H. Accuracy Analysis in Sensor Networks for Asynchronous Positioning Methods. Sensors 2019, 19, 3024. [Google Scholar] [CrossRef] [PubMed]
- Álvarez, R.; Díez-González, J.; Strisciuglio, N.; Pérez, H. Multi-Objective Optimization for Asynchronous Positioning Systems Based on a Complete Characterization of Ranging Errors in 3D Complex Environments. IEEE Access 2020, 8, 43046–43056. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.M.; Aranda, J. Optimal sensor placement for multiple target positioning with range-only measurements in two-dimensional scenarios. Sensors 2013, 13, 10674–10710. [Google Scholar] [CrossRef] [PubMed]
- Díez-González, J.; Álvarez, R.; Prieto-Fernández, N.; Perez, H. Local Wireless Sensor Networks Positioning Reliability under Sensor Failure. Sensors 2020, 20, 1426. [Google Scholar] [CrossRef] [PubMed]
- Díez-González, J.; Álvarez, R.; Verde, P.; Ferrero-Guillén, R.; González-Bárcena, D.; Perez, H. Stable Performance under Sensor Failure of Local Positioning Systems. In Proceedings of the International Workshop on Soft Computing Models in Industrial and Environmental Applications (SOCO 2020), 16–18 September 2020; Springer: Burgos, Spain, 2020. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Parameter | Magnitude | Units |
|---|---|---|
| Frequency of emission | 5.465 | GHz |
| Transmission power | 1 | W |
| Bandwidth | 100 | MHz |
| Receptor sensibility | −90 | dBm |
| Mean noise power | −94 | dBm |
| LOS path loss exponent | 2.1 1 | |
| NLOS path loss exponent | 4.1 2 | |
| Clock frequency | 1 | GHz |
| Frequency–drift | U{−15, 15} | ppm |
| Time–frequency product | 1 |
| Number of Nodes | Genetic Algorithm | Memetic Algorithm |
|---|---|---|
| 9 | 4.30 | 4.02 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Verde, P.; Ferrero-Guillén, R.; Álvarez, R.; Díez-González, J.; Perez, H. Node Distribution Optimization in Positioning Sensor Networks through Memetic Algorithms in Urban Scenarios. Eng. Proc. 2020, 2, 73. https://0-doi-org.brum.beds.ac.uk/10.3390/ecsa-7-08220
Verde P, Ferrero-Guillén R, Álvarez R, Díez-González J, Perez H. Node Distribution Optimization in Positioning Sensor Networks through Memetic Algorithms in Urban Scenarios. Engineering Proceedings. 2020; 2(1):73. https://0-doi-org.brum.beds.ac.uk/10.3390/ecsa-7-08220
Chicago/Turabian StyleVerde, Paula, Rubén Ferrero-Guillén, Rubén Álvarez, Javier Díez-González, and Hilde Perez. 2020. "Node Distribution Optimization in Positioning Sensor Networks through Memetic Algorithms in Urban Scenarios" Engineering Proceedings 2, no. 1: 73. https://0-doi-org.brum.beds.ac.uk/10.3390/ecsa-7-08220