
Logics for Epistemic Actions: Completeness, Decidability, Expressivity †


1
Institute for Logic, Language and Computation (ILLC), University of Amsterdam, 1090 GE Amsterdam, The Netherlands
2
Mathematics Department, Indiana University, Bloomington, IN 47405-7106, USA
3
Mathematics Department, Cornell University, Ithaca, NY 14853, USA
*
Author to whom correspondence should be addressed.
†
This paper was intended to be the “journal version” of our 1998 paper “The logic of common knowledge, public announcements, and private suspicions”. It was mainly written in 2004, with a few bibliographic additions coming a few years later. Several pages were rewritten in early 2023.
Logics 2023, 1(2), 97-147; https://0-doi-org.brum.beds.ac.uk/10.3390/logics1020006
Submission received: 15 June 2022
/
Revised: 3 March 2023
/
Accepted: 18 April 2023
/
Published: 12 June 2023
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:We build and study dynamic versions of epistemic logic. We study languages parameterized by an action signature that allows one to express epistemic actions such as (truthful) public announcements, completely private announcements to groups of agents, and more. The language (Σ) is modeled on dynamic logic. Its sentence-building operations include modalities for the execution of programs, and for knowledge and common knowledge. Its program-building operations include action execution, composition, repetition, and choice. We consider two fragments of . In , we drop action repetition; in , we also drop common knowledge. We present the syntax and semantics of these languages and sound proof systems for the validities in them. We prove the strong completeness of a logical system for and the weak completeness of one for . We show the finite model property and, hence, decidability of . We translate into PDL, obtaining a second proof of decidability. We prove results on expressive power, comparing with modal logic together with transitive closure operators. We prove that a logical language with operators for private announcements is more expressive than one for public announcements.
1. Introduction
One of the goals of dynamic epistemic logic is to construct logical languages which allow one to represent a variety of possible types of changes affecting the information states of agents in a multi-agent setting. One wants (formal) logical systems with primitive operations corresponding to (informal) notions such as public announcement, completely private announcement, and private announcement to one agent with suspicion by another, etc. And then, after the logics are formulated, one would ideally want technical tools to use in their study and application.
The full formulation of such logics is somewhat of a complicated story. In the first place, one needs a reasonable syntax. On the semantic side, there is an unusual feature in that the truth of a sentence at a point in one model often depends on the truth of a related sentence in a different model. In effect, the kinds of actions we are interested in give rise to functions, or relations more generally, on the class of all possible models.
There have been some proposals on logical systems for dynamic epistemic logic beginning with the work of Plaza [1], Gerbrandy [2,3], and Gerbrandy and Groeneveld [4]. These papers formulated logical systems for the informal notions of public announcement and completely private announcement. They left open the matter of axiomatizing the logics in the presence of common-knowledge operators. (Without the common-knowledge operators, the systems are seen to be variants on standard multi-model logic.) And they also left open the question of the decidability of these systems. Our work began with complete axiomatizations for these systems and for more general systems. Our results were presented in [5]. As it happens, the logics which we constructed in [5] did not have the friendliest syntax. The first two authors pursued this matter for some time and eventually came to the proposals in [6]. The logical systems for the validities of the ultimate languages are certainly related to those in [5]. But due to the different formulation of the overall syntax and semantics, all of the work on soundness and completeness had to be completely reworked. The main purpose of the present paper is to present these results. Secondarily, we present some technical results on the systems such as results on expressive power.
1.1. Contents of This Paper: A High-Level View
This paper is a long technical development, and for this reason we did not include a full-scale motivation of the logical systems themselves. For a great deal of the motivational material, one should see [5]. Section 2 formulates all of the definitions needed in the paper. The presentation is based closely on the work in [6], so readers familiar with that paper may use Section 2 as a review. Other readers of this paper could take the logical systems here to simply be extensions of propositional dynamic logic which allow one to make “transitions from model to model” in addition to transitions “inside a given model”. In addition, Section 2.8 is new in this paper.
The logical languages studied in this paper are presented in Section 3. Section 3.2 presents some examples of the semantics, chosen to foreshadow work in Section 6 on expressive power. The logical system is presented in Section 4, along with a soundness result for most of the system. The completeness theorem for the logic comes in Section 5. The final section deals with questions of expressive power, and it may be read after Section 4.
Two aspects of our overall machinery are worth pointing out. The first is the use of the canonical action model. This is a semantic object built from syntactic objects (sequences of simple actions, terms in our language ). We would like to think that the use of the canonical model makes for a more elegant presentation than one would otherwise have.
The second feature is a term rewriting system for dealing with assertions in the language. The semantic equivalences in dynamic epistemic logic are sufficiently complicated that the ‘subsentence’ relation is not the most natural or useful one for many purposes. Instead, one needs to handcraft various ordering relations for use in inductive proofs, or in defining translations. For just one example, in the logic of public announcements one has an announcement–knowledge axiom in a form such as
(Here, the notation can be read: if is true, then after announcing it publicly, is true.) This is for a logic with just one agent, and in this discussion we are forgetting about common knowledge. To prove that the logic has a translation t back to ordinary modal logic, one wants to use the equivalence in (1), above, as the key step in the translation, defining to be . But then one needs to have some reason to say that both and (more critically) are of lower complexity than the original formula . There are several ways to make this precise. One is to directly assign an element of some well-founded set to each formula and then use this as a measure of complexity. This is carried out in [7], and the well-founded set is the natural numbers. Our treatment is different, mainly because it goes via term rewriting. In effect, one takes the well-founded set to be the sentences themselves, with the order given by substitution using laws such as (1), but oriented in a specified direction (left to right, for example). Then the fact that we have a well-founded relation is a result one proves about oriented sets of laws (term rewriting systems). In our case, we use an interpretation constructed by hand.
Our term rewriting system is presented and studied in Section 5.2. It actually deals not with but with a different language called . An important by-product of our completeness proof via rewriting is a Normal Form Theorem for . This is an interesting result in itself, and it does not follow from other completeness proofs such as those in [7]. In order to use the rewriting system, one needs to know that substitution of “equivalent” objects preserves “equivalence” and that the proof system itself is strong enough to reduce sentences to normal form. Unfortunately, this “obvious” point takes a great deal of work. The details are all in this paper, and to our knowledge no other source presents complete proofs on these matters.
1.2. Comparison with Some Other Work
The first version of this paper is our 1998 conference publication [5]. We ourselves had several versions of this paper issued as technical reports or posted on web sites, and so in some sense the results here are public but not published. Since its inception, the subject of dynamic epistemic logic has taken off in a serious way. It sees dozens of papers a year. But it seems fair to say that the overall topics of investigation are not the logical systems presented in any of the original papers but rather are adaptations of the logics to settings involving probability, belief revision, quantum information, and the like. Still, the work reported here has been the subject of several existing publications. And so it makes sense for us to make the case that the results in this paper are still relevant and do not follow from previously published results.
Our 2016 paper [8] is also a follow-up version of [5]. But in [8], we did not have the space to include all of the material in this paper, and so the particular logic in that paper was a fragment of the one here, with a simpler technical treatment. In addition, the first part of [8] is from [6] and goes beyond what we do here.
The book Dynamic Epistemic Logic by Hans van Ditmarsch, Wiebe van der Hoek, and Barteld Kooi [7] is a textbook presentation containing some of the content of this paper and [6], with additional material on model checking, belief revision, and other topics. Section 6.4 presents the syntax of what it calls action model logic and writes as . At first glance, the syntax of seems fairly close to the language presented in [6] and reviewed in Section 3 of this paper. A relatively small difference concerns the action models in . (In general, action models are like Kripke models together with a “precondition” function mapping worlds to sentences.) These are required to have the property that each agent’s accessibility relation is an equivalence relation; our treatment is more general and, hence, can present logics for epistemic actions such as “cheating” in games. But the main difference is that our language uses what everyone would take to be a bona-fide syntax: sentences and program expressions are linearly ordered strings of symbols. In contrast, the syntax of employs action models directly. Structured but unordered objects occur inside of sentences. In a different context, it would be like studying formal language and their connection to automata by studying something that was like a regular expression but allowed finite automata to directly occur inside some syntactic object.
We have no objection ourselves to this move. In fact, this was the presentation we chose in our first version [5] of this paper. But over the years we have found quite a lot of resistance to this presentation on the grounds that one is “mixing syntax and semantics”. Again, we do not assert this objection, but we address it by employing the large technical machinery that we see in [6] and also Section 2 and Section 3. (We are keenly aware of the irony of our being criticized for “mixing syntax and semantics” in [5], and after we “un-mixed” them in [6], we find others making the same natural move.)
We would also like to mention the paper “Logics of Communication and Change”, van Benthem, van Eijck and Kooi [9]. This paper presents completeness theorem for a logical system in the same family as ours. But as it happens, the paper studies a different system. To see the differences, it is worthwhile to note that the source of much of the work in this area concerns assertions of common knowledge following an action of some sort. In our setting, these would be written . It turns out that there is no equivalence of the form (1) for assertions such as this. This leads us to our action rule, an inference rule allowing the derivation of sentences of the kind under discussion. The idea in [9] is to start with a more expressive ’static’ language (than just epistemic logic with common knowledge), namely, an ‘epistemic’ version of propositional dynamic logic, called E-PDL in the paper (‘E’ for ‘epistemic’). Then one adds ‘action’ modalities corresponding to update models ; this modality would be like our , but in [9] as in [5,7], this U is an action model rather than a bona-fide syntactic object. One can then prove that the action modalities can be translated away into the static base, via reduction axioms. This very interesting and suggestive result is not available in our more restrictive setting, but that seems to be the price for sticking with a language that has a very clear epistemic interpretation. In fact, it is not known whether E-PDL is actually stronger than the logical systems in this paper 1, and if it is then it is not clear what is the epistemic use of this additional expressive power 2.
2. Definitions
This section provides all of our definitions. It is short on motivation, and we have situated the examples in Section 3.2, following all the definitions. See also Sections 1 and 2 of [6] for the motivation from epistemic logic and for a more leisurely presentation.
2.1. State Models and Propositions
We fix a set of atomic sentences and also a set of agents. All of our definitions are relative to these sets.
A state model is a triple consisting of a non-empty set S of “states”; a family of binary accessibility relations , one for each agent ; and a “valuation” (or a “truth” map) , assigning to each atomic sentence p a set of states. These are exactly Kripke models generalized by having one accessibility relation for each agent. We use the terminology of state models because there are other kinds of models, action models and program models, in our study. When dealing with a single fixed-state model , we often drop the subscript from all the notation.
Definition 2.1.
Let be the collection of all state models. An epistemic proposition is an operation defined on such that for all , .
The collection of epistemic propositions is closed in various ways.
- For each atomic sentence p we have an atomic proposition p with .
- If is an epistemic proposition, then so is , where .
- If C is a set or class of epistemic propositions, then is an epistemic proposition, where
- Taking C, above, to be empty, we have a “universally true” epistemic proposition , with .
- We also may take C in part 3 to be a two-element set ; here, we write instead of . We see that if and are epistemic propositions, then so is , with .
- If is an epistemic proposition and , then is an epistemic proposition, with
- If is an epistemic proposition and , then is an epistemic proposition, withHere iff there is a sequencewhere . In other words, there is a sequence of arrows labelled with agents from the set taking s to t. We allow here, so includes the identity relation on S.
Syntactic and Semantic Notions
It will be important for us to make a sharp distinction between syntactic and semantic notions. We have already begun to do this, speaking of atomic sentences and atomic propositions. The difference for us is that atomic sentences are entirely syntactic objects: we will not treat an atomic sentence p as anything except an unanalyzed mathematical object. On the other hand, this atomic sentence p also has associated with it the atomic proposition p. As defined in point 1, p will be a function whose domain is the (proper class of) state models, and it is defined by
This difference may seem pedantic at first, and surely there are times when it is sensible to blur it. But for various reasons that will hopefully become clear, we need to insist on it.
Up until now, the only syntactic objects have been the atomic sentences . But we can build the collections of finitary and infinitary sentences by the same definitions that we have seen, and then the work of the past section is the semantics of our logical languages. For example, we have sentences , , and . These then have corresponding epistemic propositions as their semantics: , , and , respectively. Note that the latter is a properly infinitary proposition (and so is a properly infinitary sentence); it abbreviates the infinite conjunction
2.2. Updates
A transition relation between state models and is a relation between the sets S and T; i.e., a subset of . An update is a pair of operations
the first takes each to a state model , and the second takes each to a relation between and . For the second map, we write . We call the update map, and the update relation.
We continue our general discussion by noting that the collection of updates is closed in various ways.
- Skip and Crash: there exist updates called “Skip”, denoted by 1, and “Crash”, denoted by 0. Both keep the original state model unchanged , but they differ in the fact that is the identity relation on , while is the empty relation.
- Sequential composition: if and are epistemic updates, then their composition is again an epistemic update, where , and . Here, we use on the right side the usual composition ; of relations 3.
- Union (or non-deterministic choice): If X is any non-empty set of epistemic updates, then the union is an epistemic update, defined as follows. For each , the set of states of the model is the disjoint union of all the sets of states in each model for :Similarly, each accessibility relation is defined as the disjoint union of the corresponding accessibility relations in each model:The valuation in is the disjoint union of the valuations in each state model:Finally, the update relation between and is the union of all the update relations :For the empty set of updates , we conventionally put to be the above-defined “crash” update.
- Special case: binary union. The (disjoint) union of two epistemic updates and is an update , given by .
- Another special case: Kleene star (iteration). We have the operation of Kleene star on updates:where is recursively defined by , .
The operations , and are the natural analogues of the operations of union of relations, relational composition and iteration, and of the regular operations on programs in PDL. The intended meanings are: for , sequential composition (do , then do ); for , non-deterministic choice (do either or ); for , iteration (repeat some finite number of times).
2.2.1. Standard Updates
An update is standard if for all state models , is a partial function. (The relation is the inverse of the update relation; it is a subset of .)
Proposition 2.2.
The update 1 is standard. The composition of standard updates is standard, as is any union of standard updates.
2.2.2. Updates Determine Dynamic Modalities
If is an epistemic proposition and an update, then is an epistemic proposition defined by
We should compare (4) and (2). The point is that we may treat updates in a similar manner to other box-like modalities; the structure given by an update allows us to do this.
We also define the dual proposition by
2.3. Action Models and Program Models
Let be the collection of all epistemic propositions. An (epistemic) action model is a triple , where is a non-empty set of simple actions, is an -indexed family of binary relations on , and .
To model non-deterministic actions and non-simple actions (whose appearances to agents are not uniform on states), we define epistemic program models. In effect, this means that we decompose complex actions (‘programs’) into “simple” ones: they correspond to sets of simple, deterministic actions from a given action model.
A program model is defined as a pair consisting of an action model and a set of distinguished simple actions. Each of the simple actions may be thought of as a possible “deterministic resolution” of the non-deterministic action . As announced above, the intuition about the map called is that an action is executable in a given state only if all its preconditions hold at that state. We often spell out an epistemic program model as rather than . Also, we usually drop the word “epistemic” and just refer to these as program models.
2.4. The Update Product
Given a state model and an action model , we define their update product to be the state model
given by the following: the new states are pairs of old states s and simple actions which are “consistent”, in the sense that all preconditions of the action “hold” at the state s
The new accessibility relations are taken to be the “products” of the corresponding accessibility relations in the two frames; i.e., for we put
and the new valuation map is essentially given by the old valuation:
2.5. Updates Induced by Program Models
Recall that we defined updates in Section 2.2. And above, in Section 2.3, we defined epistemic program models. Note that there is a big difference: the updates are pairs of operations on the class of all state models, and the program models are typically finite structures. We think of program models as capturing specific mechanisms, or algorithms, for inducing updates. This connection is made precise in the following definition.
Definition 2.3.
Let be a program model. We define an update which we also denote as follows:
- .
- if and .
We call this the update induced by .
Note that updates of the form have the property that for all state models , the inverse of the update relation is a partial function. That is, these updates are standard.
2.6. Operations on Program Models
2.6.1. 1 and 0
We define program models 1 and 0 as follows: for both of them we take our underlying action model to be given by any one-action set with for all A, ; the only difference is that for 1 we take the distinguished set , while for 0 we put . The point here is that the update induced by the program model for 1 is equivalent to the update 1 from Section 2.2, and, similarly, the update induced by the program model for 0 is what we called 0 in Section 2.2. That explains why we purposely use the same notation for these program models as for the corresponding updates.
2.6.2. Sequential Composition
In all settings involving “actions” in some sense or other, sequential composition is a natural operation. In our setting, we would like to define a composition operation on program models, corresponding to the sequential composition of updates. Here is the relevant definition.
Let and be program models. We define the composition
to be the following program model:
- is the cartesian product of the sets and .
- in the composition is the family of product relations, in the natural way:
- .
- .
In the definition of , is an abbreviation for the induced update , as defined in Section 2.5.
2.6.3. Unions
If and , we take to be the disjoint union of the models, with the union of the distinguished actions. The intended meaning is the non-deterministic choice between the programs represented by and . Here is the definition in more detail, generalized to arbitrary (possibly infinite) disjoint unions: let be a family of program models, with ; we define their (disjoint) union
to be the model given by:
- is , the disjoint union of the sets .
- if and .
- .
- .
2.6.4. Iteration
Finally, we define an iteration operation by . Here, and .
Our definition of the operations on program models are faithful to the corresponding operations on updates from Section 2.2.
Proposition 2.4
([6]). The update induced by a composition of program models is isomorphic to the composition of the induced updates. Similarly, for sums and iteration, mutatis mutandis.
Since we shall not use this result, we omit the proof.
2.7. Action Signatures
Definition 2.5.
An action signature is a structure
where is a finite Kripke frame, and is an enumeration of in a list without repetitions. We call the elements of action types. When we deal with an action signature, our notation for the action types usually includes a subscript (even though this is occasionally redundant); thus, the action types come with a number that indicates their position in the fixed enumeration of the action signature.
An action signature together with an assignment of epistemic propositions to the action types in gives us a full-fledged action model. And this is the exact sense in which an action signature is an abstraction of the notion of action model. We shall use action signatures in constructing logical languages.
Example 2.6.
Here is a very simple action signature which we call . Σ is a singleton , , and for all agents A. In a sense, which we shall make clear later, this is an action in which “nothing happens”, and, moreover, it is common knowledge that this is the case.
The next simplest action signature is the “test” signature . We take , with the enumeration . We also take , and for all A. This turns out to be a totally opaque form of test: φ is tested on the real world, but nobody knows this is happening. Its function will be to generate tests , which affect the states precisely in the way dynamic logic tests do.
For each set of agents, we define the action signature of completely private announcements to the group . It has ; for all , for , and for all agents A.
The action signature of all completely private announcements (to arbitrary subgroups) can be thought of as the disjoint union of all the action signatures with . However, we can avoid some redundancy by identifying all the actions regardless of which signature they come from: in other words, we set , with for all , for , and for all agents A.
Next, we consider the action signature of private announcements to the group with secure suspicion of k possible announcements by the outsiders. It has the following components: (we assume these sets to be disjoint); for all and all ; for all and ; for and ; for all and ; and, finally, for all agents A.
The action signature is given by: ; for and ; and, finally, for and . This action signature is called the signature of common knowledge of alternatives for an announcement to the group .
2.7.1. Signature-Based Program Models
Let be an action signature, let n be the number of action types in , let , and let be a list of epistemic propositions. We obtain a program model in the following way:
- The set of simple actions is , and the accessibility relations are those given by the action signature.
- For , .
- The set of distinguished actions is .
In the special case that is the singleton set , we write the resulting signature-based program model as .
Finally, recall from Section 2.5 that every signature-based program model induces an update.
To summarize: every action signature, set of distinguished action types in it, and tuple of epistemic propositions gives a program model in a canonical way. Every program model induces a standard update.
As examples, note that both our program model 1 for “Skip” and our program model 0 for “Crash” (as defined above) are signature-based: indeed, the signature is as defined above (having only one action type , with loops for all agents and true precondition), while the designated sets of actions are and, respectively, .
2.8. Bisimulation-Based Notions of Equivalence
In this section, we discuss natural notions of equivalence for some of the definitions which we have already seen. We begin by recalling the most important notion of equivalence for state models, bisimulation.
Definition 2.7.
Let and be state models. A bisimulation between and is a relation such that whenever , the following three properties hold:
- if for all atomic sentences p.
- For and such that , there is some such that and .
- For and such that , there is some such that and .
R is a total bisimulation if it is a bisimulation and, in addition: for all there is some such that , and vice-versa.
Proposition 2.8.
If there is a bisimulation R such that , then s and t agree on all sentences φ in infinitary modal logic: if .
Recall that is the class of all state models. We have spoken of states as the elements of state models, but we also use the term states to refer to the pointed-model pairs , with and . The class of all states is itself a state model, except that its collection of states is a proper class rather than a set. Still, it makes sense to talk about bisimulation relations on the class of all states. The largest such is given by
This relation ≡ is indeed an equivalence relation on ‘states’ (pointed models), called the bisimilarity relation. When and are clear from the context, we write instead of .
2.8.1. Equivalence and Preservation by Bisimulation
Since we are discussing notions of equivalence here, it makes sense to also think about epistemic propositions. Two propositions and are equal if they are the same operation on . That is, for all , . Later, we shall introduce syntactically defined languages and also proof systems to go with them; in due course we shall see other interesting notions of equivalence.
Moving towards a connection of propositions with bisimulation, we say that a proposition is preserved by bisimulations if whenever , then iff .
Proposition 2.9
([6]). The propositions which are preserved by bisimulation include and the atomic propositions p, and they are closed under all of the (infinitary) operations on propositions from Section 2.1.
2.8.2. Equivalence of Bisimulation-Preserving Updates
From now we will focus on a special class of well-behaved updates: the ones that preserve bisimulation.
Definition 2.10.
An update preserves bisimulations if the following two conditions hold:
- 1.
- If and , then there is some such that and .
- 2.
- If and , then there is some such that and .
An action model preserves bisimulations if the epistemic proposition is preserved under bisimulations for all .
It is easy to see that the updates 1 and 0 are bisimulation-preserving, and, similarly, that the action models for the programs 1 and 0 preserve bisimulation. More examples can be produced using the following two results.
Proposition 2.11
([6]). Concerning bisimulation preservation:
- 1.
- The bisimulation-preserving updates are closed under composition and (infinitary) unions.
- 2.
- If is preserved by bisimulations and preserves bisimulations, then is preserved by bisimulations.
Proposition 2.12
([6]). Let Σ be a bisimulation-preserving action model. Let be arbitrary. Then, the update induced by preserves bisimulation.
We can now define an appropriate notion of equivalence between bisimulation-preserving updates.
Definition 2.13.
Two bisimulation-preserving updates and are equivalent if the following two conditions hold:
- If then there is some such that and .
- If , then there is some such that and .
We write for the update-equivalence relation.
Proposition 2.14.
Update equivalence ≅ is an equivalence relation on the class of bisimulation-preserving updates.
Proof.
For reflexivity, let be a bisimulation-preserving update. We can check that by applying the definition of bisimulation preservation to and to models and states . Symmetry follows immediately from the definition of ≅ together with the symmetry of the bisimilarity relation ≡. For transitivity, assume that and . To show that , we check only condition 1 (since the proof of condition 2 is similar). For this, suppose that we have . Since , there must exist some such that and . The first of these, together with the fact that , implies that there must exist some such that and . By the transitivity of the bisimilarity relation, we also have , as desired. □
Proposition 2.15.
Let and be models and let be states. Assume that . Let and be bisimulation-preserving updates such that . Then we have the following:
- If , then there is some such that and .
- If , then there is some such that and .
Proof.
The second clause follows from the first, using the fact that the relations of update equivalence and bisimilarity are symmetric. So it is enough to check the first clause. From , and the fact that preserves bisimulation, it follows that there exists some such that and . From and , it follows that there exists some such that and . Putting these together and using the transitivity of the bisimilarity relation ≡, we conclude that , as desired. □
Proposition 2.16.
Let and . Then, , and also .
Proof.
To prove , we only check the first clause in the definition of update equivalence. Suppose that , i.e., there exists some such that and . From and , we infer that there is some with and . By using these together with the fact that , and applying Proposition 2.15, we obtain some such that and , as desired.
For the second claim, we again only prove the first clause in the definition of . Suppose that . By the definition of , this means that we either have for some t satisfying , or else we have for some t satisfying . We only treat the first case (the other case is similar), so we have and . Using the fact that , we infer that there exists some such that and . Using these and taking the state in the model , we can easily check that we have and , as desired. □
Proposition 2.17.
For all bisimulation-preserving , we have , as well as and .
Proof.
Easy verification. □
Proposition 2.18.
Let and be standard bisimulation-preserving updates. If is preserved by bisimulations and , then , and also .
Proof.
We check the first assertion only. Fix , and let be such that that . Let be such that . We must show that .
For this, we use and , and by the definition of update-equivalence we infer that there exists some such that and . From and , it follows that . This, together with and the fact that is preserved by bisimulations, implies that , as desired. □
Proposition 2.19.
Let and be standard bisimulation-preserving updates. If , then and have the same domain. That is, for all state models , .
Proof.
The domains are and , where recall that is the “universally true” proposition. So the result follows from Proposition 2.18 and the fact that is preserved by bisimulations. □
Definition 2.20.
Let and be action models. As this notation indicates, we shall not introduce additional notation to differentiate the arrows and the functions on these action models. A bisimulation between and is a relation such that whenever , the following three properties hold:
- 1.
- .
- 2.
- For and such that , there is some such that and .
- 3.
- For and such that , there is some such that and .
We write , and say that actions and are bisimilar, if there is a bisimulation R between and such that
.
Let and be program models. A bisimulation between and is a bisimulation R between and such that the following hold:
- 1.
- If , then there is some such that .
- 2.
- If , then there is some such that .
If such a bisimulation exists, then we write , and say that the program models and are bisimilar.
Proposition 2.21.
If is any program model, 1 is the above-defined program model for “Skip” and 0 is the above-defined program model for “Crash”, then we have , as well as and .
Proof.
Easy verification. □
Proposition 2.22.
If two bisimulation-preserving program models are bisimilar, then they induce equivalent updates.
Proof.
Let and be program models, and let R be a bisimulation between and . To prove our claim, we first construct a bisimulation between the update products and , by putting for all states :
It is easy to check that this is a bisimulation relation. The atomic preservation is obvious: implies that , and so both and satisfy the same atomic sentences as . For the forth clause, assume that we have and . From these, we obtain and , as well as and . Since R is a bisimulation between and , there must exist some such that and . This gives us that , and since , we have that , and so the state exists. This state is our witness for the forth clause: it is easy now to check that we have and , as desired. The back condition is similar.
We can now prove that the updates and are equivalent. Let be the update induced by (via the update product), and let be the update induced by . We need to prove that . For this, we only check the first condition in the definition of update equivalence (the second condition is similar). Assume that with . Since R is a bisimulation between and , there exists some such that . This implies that , and so gives us ; hence, the state exists. This state is our witness for the first clause in the definition of update equivalence: it is easy now to check that we have and , and so we also have (since is a bisimulation between and ), as desired. □
Note Bisimilarity is not the weakest (most general) relation on program models that implies update equivalence. Cf. the work in [13], in which a weaker such relation is studied (‘action emulation’). So, in a sense, our notion of program bisimilarity is too strong for the job that it was designed for. However, it has the advantage of simplicity, and it will be sufficient for our purposes. It is also a very natural notion to study in the context of the other concepts of bisimulation equivalence considered in this section.
3. Signature-Based Languages and Their Fragments
At this point, we have enough general definitions to present the syntax and semantics of our signature-based languages and their important sublanguages and . Most of the remaining parts of this paper study these languages.
3.1. Syntax and Semantics
Fix an action signature . See Figure 1 for the syntax of a logical language , together with its sublanguages and .
As in , we have two sorts of syntactic objects: sentences and programs. The set of sentences and the set of programs are simultaneously defined by mutual recursions. We call programs of the form basic actions, where . Here, the number n is the number of action types in , and basic actions are formed by postfixing any such action type with an n-long string of already-formed sentences in our language 4. Arbitrary programs are recursively formed from basic actions, as well as from the programs and , by applying the standard regular program operations of : non-deterministic choice , sequential composition and iteration . In their turn, sentences are recursively built from atomic sentences , by applying standard Boolean connectives, as well as modalities (for any agent A), (for any set of agents ) and (for any program ).
The sublanguage is obtained by dropping iteration from the constructs of , while the sublanguage is obtained by dropping both iteration and the common knowledge modalities .
We use the following standard abbreviations: , , , , , , and .
The semantics defines two operations by simultaneous recursion on :
- , taking the sentences of into epistemic propositions.
- , taking the programs of into program models (and, hence, into induced updates).
The formal definition is given in Figure 1. The first map might be called the truth map for the language. When we began our study of state models, we started with a “valuation” (or a “truth” map) , assigning to each atomic sentence p a set of states. The truth map here extends this to sentences and actions of . The overall definition is by simultaneous recursion on . We employ the standard device of speaking of the definition in terms of a temporal metaphor. That is, we think of the definition of the semantics of a sentence or action as coming “after” the semantics of its subsentences and subactions.
With one key exception, the operations on the right-hand sides are immediate applications of our general definitions of the closure conditions on epistemic propositions from Section 2.1 and the operations on program models from Section 2.6. A good example to explain this is the clause for the semantics of sentences . Assuming that we have a program model , we obtain an induced update in Section 2.5 which we again denote . We also have an epistemic proposition . We can, therefore, form the epistemic proposition (see Equation (4) in Section 2.2). Note that we have overloaded the square-bracket notation; this is intentional, and we have done the same with other notation as well.
Similarly, the semantics of and are the program models 1 and 0 of Section 2.6.
We also discuss the definition of the semantics for basic actions . For this, recall that we have a general definition of a signature-based program model , where and the ’s are any epistemic propositions. What we have in the semantics of is the special case of this where is the singleton and is , a proposition which we have already defined when we come to define .
Logics Generated by Families of Signatures
Up until now, we have defined logics of the form for a single action signature . Recall also that each action signature is finite. It is also natural to think about the logic of all finite action signatures. That is, we want to combine all of the logics even though we cannot literally combine the action signatures.
More generally, given a family of action signatures, we would like to combine all the logics into a single logic. Let us assume the signatures are mutually disjoint (otherwise, just choose mutually disjoint copies of these signatures). We define the logic generated by the family in the following way: the syntax is defined by taking the same definition we had in Figure 1 for the syntax of , but in which on the side of the programs we take instead as basic actions all expressions of the form
where , for some signature , and n is the length of the listing of non-trivial action types of . The semantics is again given by the same definition as in Figure 1, but in which the clause about refers to the appropriate signature: for every , every ; if n is the length of the listing of , then
It is important to note that, in general, is not a signature-based language of the form for any single (finite) signature . However, our definition of signature-based languages has a natural generalization to locally finite ’signatures’ 5, and then one can see the languages as being based on such generalized signatures.
3.2. Examples
In this section, we provide examples of the concepts from Section 2.1, Section 2.2, Section 2.3, Section 2.4, Section 2.5, Section 2.6, Section 2.7, Section 2.8, Section 3.1. Our examples of state models are chosen with an eye towards one of the inexpressivity results in Section 6.2 and Section 6.3 near the end of the paper. So we know that they may appear artificial. Still, we trust that having a suitably detailed example may help the reader.
First, we need to introduce some concrete examples of signature-based languages. The language of public announcements is the special case of our general class of languages that is obtained by taking the action signature of public announcements, as we defined it in Section 2.7: , , and . We can similarly define the language of completely private announcements by taking the signature of all private announcements, as defined in Section 2.7: , with for all , for , and for all agents A. For both public and private announcements, we can consider sublanguages , , , and , as above, by applying the corresponding syntactic restrictions.
In our following examples, we will more specifically fix our set of atomic sentences to be a two-element set , and fix the set of agents to be the two-element set .
As a first example, we consider a family of state models , one for each even positive numbers n. is a cycle of points arranged as follows:
Since n is even, for , the connection is (We are taking subscripts modulo here.) We also specify that p is true at all points except and , and q is true only at .
We will look at the sentence , belonging to the language , and aim to evaluate in each of the models . (Without abbreviations, this sentence would be .) The point of this first example is to calculate . This takes a few steps.
The definitions tell us that , and so
We have a signature-based program model . (In more detail, is an action signature, our distinguished set is , and is the the proposition p.) We can take the update product of this with to obtain the model . The state set of this state model is
The accessibilities are given by
In this model p is true at all points, and q is true only at . The update relation is
The intuition is that when we relativize the model to p (that is, we update the model with a public announcement of p), and disappear. The cycle breaks into two disconnected components.
To save on notation, let us write for the model . It follows that
and, therefore, that
It now follows that
Later, we are going to be especially interested in the points and . The analysis above shows that does not belong to , but does belong to it. The intuition is that after we relativize the original cycle to p by deleting and , there is no path from to . But even after we make the deletion, there is a path from to , and this is why satisfies the sentence .
A Second Example
We next consider a different example based on the signature of completely private announcements. contains the following sentence
We show in Section 6.3 that cannot be expressed by any sentence in and that is not expressible in , even by a set of sentences. This means that there is no set T of sentences of such that for every state, , for each iff . We take this inexpressibility result to be a formal confirmation that a logical system with private announcements is more powerful than a system with only public announcements.
Definition 3.1.
For each non-zero natural number n we shall construct models and . These two models have the same state set:
The atomic proposition p is true at all points except b, and no other atomic propositions are true anywhere. The arrows in are given by
- 1.
- for all x.
- 2.
- .
- 3.
- .
- 4.
- for all .
- 5.
- .
has all these arrows and exactly one more:
- 6.
- .
The model is shown in Figure 2. We did not show the reflexive arrows.
For all , the submodels of and reachable from x are the same. Therefore, we have the following fact:
This holds for all in .
Let us calculate and . Intuitively, we are making a private announcement of p to A. To save on notation, we call the updated models and .
Here are some facts about the structure of :
- .
- The only -successor of is itself. In particular, does not hold, since does not belong to the model.
- whenever in and similarly for .
- for .
The structure of differs from . Since in , we have a path in :
Once again, contains no path from to any other point, in particular, no path to .
The update relation between and is And from this, we see that with from (8),
In particular, .
The update relation between and is the same, and we have
And this time, .
In Section 6.3, we shall use these models to prove the result announced above: that our sentence is not expressible by any set of sentences using public announcements only. The intuition is that the models and differ on due to the private announcement in that sentence, but as far as public announcements go, the two models are “pretty close”. Of course, “pretty close” needs to be defined and studied, and this is what we do in our later section. The formal proof does not use any of our other results, and the reader may turn to it at this point.
3.3. Basic Properties
Proposition 3.2.
Let φ be a sentence of , and let α be an action of . Then:
- 1.
- The epistemic proposition is preserved by bisimulation.
- 2.
- The update is standard and preserves bisimulation.
Proof.
By induction on . For and the atomic sentences , we use Proposition 2.9. The same result takes care of the induction steps for all the sentential operators except . For this, we use Proposition 2.11 part 2, and also the induction hypothesis. Turning to the programs, the standardness comes from Proposition 2.2 and the observation that signature-based program models induce standard updates. The assertion that the interpretation of programs of preserve bisimulation comes from Proposition 2.11 part 1; for the programs , we use Proposition 2.12 and the induction hypothesis. □
In what follows, we shall use Proposition 3.2 without mentioning it.
3.4. The Canonical Action Model
We henceforth restrict ourselves to the language , obtained by eliminating iteration from our repertoire. Moreover, in this section, we focus on the program expressions of . We introduce some useful meta-syntactic terms and notations, that will allow us to structure (a subset of) our program expressions as a “syntactic program model”, called the canonical action model.
Definition 3.3.
A simple action of is a program of that can be obtained from , and basic actions of (of the form , but without the use of iteration within any precondition) by repeated applications of the sequential composition operation (but no sum operation ⊔, and of course no iteration, since iteration is not present in ). So, in particular, simple actions include all the basic actions of . We use letters such as and to denote simple actions. We do so for the rest of this paper, without further notice.
3.4.1. The Canonical Action Model
We define a program model in several steps. The actions of the model (that is, the elements of its carrier set) are the simple actions of the language (as defined just above). For all A, the accessibility relation is the smallest relation such that
- .
- if in and .
- If and , then .
As before, we use the notation for the reflexive-transitive closure of the union of all accessibility relations (on simple actions) labelled by agents . In particular, the largest such relation is obtained by taking to be the set of all agents.
Proposition 3.4.
As a frame, Ω is locally finite: for each simple α, there are only finitely many β such that .
Proof .
By induction on α; we use heavily the fact that the accessibility relations on Ω are the smallest family with their defining property. For the simple action expressions , we use the assumption that the action model Σ underlying all our definitions is finite. (Taking it to be locally finite would also be sufficient.) □
Next, we define by recursion so that
This function is not the function which is part of the structure of an epistemic action model. However, there is a connection: We are in the midst of defining the epistemic action model Ω, and its function is defined in terms of .
Another point: the last clause in the definition of could read . This is equivalent to what we have above.
We set
This simple action model Ω is the canonical epistemic action model; it plays the same role in our work as the canonical model in modal logic.
Remark. 3.5.
The structure is entirely syntactic. It is not an action model. This contrasts with the canonical action model ; the last component of this structure is semantic. The syntactic structure is the one which is actually used in the statement of the action rule of the logical system. We emphasize this point to allay any suspicion that our logical system is formulated in terms of semantic concepts.
This is also perhaps a good place to remind the reader that neither nor is a first-class symbol in ; it is only a defined symbol. In Section 5, below, we shall introduce another language called . In that language, will be a first-class function symbol.
We now proceed to study the main properties of the canonical action model.
Lemma 3.6.
For any action type and simple actions , we have the following bisimilarities between program models:
- 1.
- 2.
where in the right-hand side of the second part we use the composition ; of program models.
Proof.
For the first claim, the bisimulation is the relation , where n is the number of elements in Σ.
For the second claim, the bisimulation relates any action of the form in Ω with the pair in . It is easy to check that this is a bisimulation betwen the action models Ω and , which obviously relates with , as desired. □
Definition 3.7.
For any , let be the program model . As in Section 2.5, we use the same notation to denote the induced update. (However, it will be important to distinguish the two uses, and so we speak of the program model and also the update .)
We can now prove the main result on the canonical action model.
Theorem 3.8.
Let . Then, as updates, we have .
Proof.
By induction on α. For and , it is easy to check that, as updates, is equivalent to the identity update 1, and is equivalent to 0.
We next consider an action . By the definition of the semantics, we have , while . By the first claim in the previous Lemma, these program models are bisimilar; hence, they induce equivalent updates.
Finally, consider simple actions of the form . By the semantics, , and by the induction hypothesis, this is the same as . By the second claim in the previous Lemma, this last program model is bisimilar with ; hence, the the induced updates are equivalent. □
4. The Logical System for Validity of Sentences
We write to mean that for all state models and all , . In this case, we say that φ is valid.
In principle, we are of course interested in the validities of the full languages . But as has already been mentioned, the satisfiability problems for these languages are, in general, not recursively axiomatizable. (See [14] for details on this.) This is one of the reasons we also consider sublanguages and . It turns out that is the easiest to study: it is of the same expressive power as ordinary multi-modal logic. The main completeness result of the paper is a sound and complete proof system for the validities in .
In Figure 3, below, we present the sound and complete logic for . We write if φ can be obtained from the axioms of the system using its inference rules. We often omit the turnstile ⊢ when it is clear from the context.
Most of the system will be quite standard from modal logic. The action axioms and the action rule are new, however. These include the in the atomic permanence axiom; note that, in this axiom, p is an atomic sentence. The axiom says that announcements do not change the brute fact of whether or not p holds. This axiom reflects the fact that our actions do not change any kind of local state.
The Action-Knowledge Axiom gives a criterion for knowledge after an action. It is perhaps easier to appreciate in dual form:
In words, two sentences are equivalent: first, the assertion that the action may be executed, and as a result of the execution, agent A will consider φ possible; and second, the precondition of the action holds, and A considers it possible (before the action) that the action is really and that there is some possible world in which that action may be executed and results in a state satisfying φ. This axiom should be compared with the Ramsey axiom in conditional logic.
The statement of our action rule uses the meta-syntactic terminology introduced in Section 3.4; in particular, the notion of simple actions, the syntactic accessibility relations and , and the syntactic precondition map defined on simple actions in the (syntactic version of the) canonical action model. As for its meaning, the action rule gives a necessary criterion for common knowledge after a simple action. Since common knowledge is formalized by the construct, this rule is a kind of induction rule. (The sentences play the role of strong induction hypotheses.)
Remark 4.1.
Recall that is an abbreviation for the reflexive and transitive closure of the relation . Recall also from Proposition 3.4 that there are only finitely many such that . So even though the action rule might look like it takes infinitely many premises, it really only takes finitely many.
Remark 4.2.
It is possible to drop the composition axiom in favor of a more involved version of the action rule. The point is we shall later introduce normal forms for sentences, and using the composition axiom will greatly simplify these normal forms. Moreover, adding the composition axiom leads to shorter proofs. The action rule here is geared towards those normal forms. So if we were to drop the composition axiom, we would need a stronger, more complicated, formulation of the action rule, one which involved sequences of actions. It is not terribly difficult to formulate such a rule, and completeness can be obtained by an elaboration of the work, which we shall do.
4.1. Soundness of the Axioms
In this section, we check the soundness of the axioms of the system (but not yet the soundness of the action rule). The basic axioms are all routine, and so we omit the details on them.
Proposition 4.3.
The atomic permanence axiom is sound.
Proof.
Recall from Section 2.7.1 how works; call this update . Fix a state model . The following are equivalent:
- .
- .
- If , then .
- If , then .
- If , then .
- .
Most of the individual equivalences are easy, and we only comment on (3)⟺(4) and (4)⟺(5). The definition of the update implies that . And has the property that everything which is related to by is of the form , where is from the statement of this axiom and . These points imply the equivalence (3)⟺(4). For (4)⟺(5), note that if ; also the definition of the update product in Equation (7) implies that iff . □
Proposition 4.4.
The partial functionality axiom is sound.
Proof.
Again, let . Also, let . Fix a state model . The following are equivalent:
- .
- .
- If , then .
- If , then .
- If , then .
- If , then .
- If , then .
- .
The crucial equivalence here is (6)⟹(5). The reason this holds is that in the action model for , there is just one distinguished world. So for each fixed , there is at most one t such that ; i.e., . □
Proposition 4.5.
The Action-Knowledge Axiom
is sound.
Proof.
Again, let . Fix a state model . The following are equivalent:
- .
- .
- If , then .
- If , then .
- If , then for all such that , and , we have .
- If , then for all t and all such that and : if , then .
- If , then for all t and such that and : .
- If , then for all such that , .
This completes the proof. □
Proposition 4.6.
The action-mix axiom is sound.
Proof.
This is standard. □
Proposition 4.7.
The skip axiom is sound.
Proof.
Fix a state model . Recall that the semantics of is the update 1. So the following are equivalent:
- .
- If , then .
- .
This completes the proof. □
Proposition 4.8.
The crash axiom is sound.
Proof.
Recall that , the update having an empty transition relation . Working through the definitions, is easily seen to hold vacuously. □
Proposition 4.9.
The composition axiom is sound.
Proof.
Write for and for . Fix a state model . The following are equivalent:
- .
- If , then .
- If , then .
- If and , then .
- If , then .
- .
The equivalence of (3) and (4) is by the definition of relational composition. The remaining equivalences are from the semantic definitions. The equivalence of (4) and (5) is by the fact that . □
Proposition 4.10.
The choice axiom is sound.
Proof.
Fix a state model ; we drop from the notation in the rest of this proof. Write γ for , for , for , and for . Then, the following are equivalent:
- .
- If , then .
- If , then ; and if , then .
- If , then ; and if , then .
- and .
- .
The equivalence (2)⟺(3) comes from the fact that each of the u such that is either either (a) an element t of related to s by , or else (b) an element of related to s by . This is by the definition of .
We show the equivalence (3)⟺(4) by considering the cases (a) and (b) noted just above. We use the fact that the natural injections of and in are bisimulations, and also the fact that is preserved by bisimulations (see Proposition 3.2). □
4.2. Soundness of the Action Rule
To show that the action rule is sound, we need the following preliminary result.
Lemma 4.11.
if there is a sequence of states from S
where , and also a sequence of actions of the same length k,
such that and for all , and .
Remark 4.12.
The case just says that is implied by .
Proof.
The following are equivalent:
- .
- .
- .
- , and .
- , and for some there is a sequence in ,such that and .
- There are sequences of states and actions as in the statement of this lemma.
The first equivalence is by the semantics of . The equivalence (2)⟺(3) uses the equality which we saw in the concluding statement of Theorem 3.8 in Section 3.4.1, and also Proposition 2.18. Equivalence (3)⟺(4) uses our overall definitions and the structure of Ω as an action model. (4)⟺(5) is just the semantics of . Finally, the equivalence (5)⟺ (6) again uses the conclusion of Theorem 3.8. That is, for all i, , if . □
Proposition 4.13.
The action rule is sound.
Proof.
Assume that but also . According to Lemma 4.11, there is a labeled sequence of states from S
where and each , and also a sequence of actions of length k, with the same labels,
such that for all , and . If , we would have . But one of the assumptions in the statement of the action rule is that . So we would have . This would be a contradiction.
Now we argue the case . We show by induction on that . The case is the opening assumption of this proof. Assume that . By hypothesis, . In view of the second assumption in the action rule, . Hence, . This completes our induction.
In particular, . Using again the first assumption in the action rule, we have . This is a contradiction. □
4.3. Syntactic Facts
At this point, we have presented the semantic facts which we need concerning . These include the soundness of the logical system for validity. To prove completeness, we also need some syntactic facts. We could have presented this section earlier, but since it leans on the action rule, we have delayed it until establishing the soundness of that rule.
In this section, α, β, etc., denote simple actions in .
4.3.1. A Stronger form of the Action-Knowledge Axiom
At this point, we establish a stronger form of the action-knowledge axiom. In Figure 3 in Section 4, this axiom was stated only for basic actions. The strengthenings here is to simple actions, that is, to compositions of basic actions, and .
Lemma 4.14.
The Action-Knowledge Axiom is provable for all simple actions α:
Proof.
By induction on α. If α is , , the only β with is , and equivalence (10) reads:
And this is an easy consequence of propositional reasoning, the skip axiom, and necessitation. If α is , , and there are no β such that . Equivalence (10) then reads:
By the crash axiom and modal reasoning, ; and so the assertion just above holds.
If α is of the form , then we simply have the Action-Knowledge Axiom in the form we know it.
So assume our lemma for and α; we prove it for . We show that
We start with the equivalence in (10), use necessitation and normality, and obtain
By the induction hypothesis on and several uses of the composition axiom, we have that for all β,
The composition axiom and (12) lead to the provable equivalence of and
But . In addition, we have a general fact if and . Using these observations and some propositional reasoning, we obtain (11), as desired. □
Remark 4.15.
There are no sound versions of the Action-Knowledge Axiom for actions containing ⊔. For example, let be a singleton, hence omitted from the notation. Consider as an action signature with the enumeration , , and with (say) the arrows and . Note that by atomic permanence, is equivalent to ; is equivalent to ; by action-knowledge and atomic permanence, is equivalent to ; and is equivalent to . Consider also the sentence . By the choice axiom, it is equivalent to
Now, we did not define , but the most reasonable choice is . And we did not define the accessibility structure of actions containing ⊔, but in this case the most likely choice is to have relate to itself and nothing else. But then when we write out the right-hand side of the equivalence (10), we obtain
Clearly, this is not equivalent to (13). Even if one were to change to, say, , or to , we still would not have an equivalence: (13) is stronger.
4.3.2. A Stronger form of the Partial Functionality Axiom
We shall also need the following result, a version of the partial functionality axiom:
Lemma 4.16.
.
Proof.
This is an induction, much like the proof of Lemma 4.14, above. □
4.3.3. Syntactic Bisimulation
Our next set of results pertains to a syntactic notion of action equivalence, one with a bisimulation-like flavor.
Definition 4.17.
A syntactic bisimulation is a relation R on the set of simple actions of with the following property: if , then
- 1.
- .
- 2.
- For all and A such that , there is some such that and .
- 3.
- For all and A such that , there is some such that and .
We say that and are provably equivalent if there is some syntactic bisimulation relating them. We write in this case.
For sentences, we write and say that and are equivalent if .
Lemma 4.18.
.
Proof.
By induction on α. For and , we use the skip axiom and the crash axiom, respectively. Here is the argument for α of the form . First, by necessitation we have . And by this and partial functionality, . So . That is, .
Finally, assume the result for β. Then, by normality and necessitation, . So . We conclude by showing as a general fact that . For this, the composition axiom tells us that . So . Thus, , as desired. □
Lemma 4.19.
The following monoid-type laws hold:
- 1.
- .
- 2.
- .
Proof.
We use the definitions to calculate
We obtain a formal proof using Lemma 4.18 and the skip axiom. Turning to the second law,
The equivalence above which mentions ≡ uses the composition axiom. □
Lemma 4.20.
Concerning the syntactic equivalence ≡ on Ω:
- 1.
- The relation ≡ is an equivalence relation.
- 2.
- If , …, , then .
- 3.
- .
- 4.
- .
- 5.
- If and , then .
Proof.
The first part is routine. Part (2) uses the bisimulation consisting of all pairs such that and for all i, . Lemma 4.19 is used in parts (3) and (4). The rest of the argument for part (3) is easy and we omit it. For part (4), we take R to be the set of pairs
such that for some sequence w of with , is reachable from α via w, and similarly for and (via the same w). Part (5) is similar. □
Lemma 4.21.
For all and all β such that ,
- 1.
- .
- 2.
- .
Proof.
Part (1) follows from the epistemic-mix axiom and modal reasoning. For part (2), we start with a consequence of the epistemic-mix axiom: . Then, by modal reasoning, . By the Action-Knowledge Axiom in the generalized form of Lemma 4.14, we have . □
We present next our main result on the syntactic equivalence of actions. It is a syntactic version of Proposition 2.18.
Lemma 4.22.
Let α and β be simple actions. If , then for all φ, .
Proof.
The fact that R is a syntactic bisimulation tells us that This implies (b).
By induction on φ. Fix a syntactic bisimulation R relating α and β. For or an atomic sentence , our result is easy. The induction steps for ¬ and ∧ are trivial. The step for is not hard, and so we omit it.
We next check the result for sentences . We need to see that
For this, it is sufficient by the composition axiom to show that . By Lemma 4.20, parts (1) and (5), . So we have completed the induction hypothesis.
This leaves the step for sentences of the form , assuming the result for φ. We use the action rule to show that . We need a functional witness to R; that is, a map for all such that
such that, α′R β′ for all the actions. Further, let be We need to show that for all A ∈ C and all
- a.
- b.
- If then
For (a), we know from Lemma 4.21 that By induction hypothesis on φ, And this implies (a). For (b), Lemma 4.21 tells us that under the assumptions,
This completes the induction on φ. □
Lemma 4.22 will be used in several places to come.
5. Completeness Theorems
In this section, we prove the completeness of our logical systems for and . (See Figure 1 for these.) Recall that the difference between the two languages is that the second has the common-knowledge propositional operators while the first does not. This difference makes the bigger system much more expressive, and more difficult to study. As it happens, the extension of to the full logic , the extension via the action iteration operation , leads to a logical language whose validity problem is complete . So there cannot be a recursively axiomatized logical system for the validities of . Returning to the smaller , even here the common-knowledge operators give a logical system which is not compact. So we cannot have a strongly complete logic for it; that is, we cannot axiomatize the notion of validity under hypotheses . The best one can hope for is weak completeness: if and only if . We prove this in Theorem 5.31. As a result of some preliminary results aimed toward that result, we establish the strong completeness of our axiomatization of the weaker logic . The work there is easier because it relies on a translation into modal logic.
In a later section, we show that in contrast to our translation results for , the larger language cannot be translated into or even to (modal logic with extra modalities ). So completeness results for cannot simply be based on translation.
5.1. The Ideas
Our completeness proofs are somewhat involved, and it might help the reader to have a preview of some of the ideas before we get started. For , the leading idea is that we can translate the logic back to ordinary modal logic. Then we obtain completeness by taking any logical system for modal logic and adding whatever principles are needed in order to make the translation. This idea is simple enough, and after looking at a few examples one can see how the translation of to modal logic should go. But the formal definition of the translation is complicated. Our definition goes via a term rewriting system related to the axioms of the logic. Part of our work in this section will be to prove the termination of our system. It would have been nice to use some off-the-shelf results of term rewriting theory to get the termination of our system, but this does not seem to be possible. In any case, we prove termination by establishing a decreasing interpretation of the system; that is, rewriting a sentence leads to a decrease in an order < that we study at length. Our interpretation is exponential rather than polynomial, and it was found by hand.
When we turn to , our model is the filtration proof of the completeness of PDL due to Kozen and Parikh [15]. We need to use the action rule rather than an induction rule, but modulo this difference, the work is similar. We also need to use some of the details on the ordering < mentioned above. That is, even if one were interested in the completeness theorem of alone, our proof would still involve the general rewriting apparatus.
Definition 5.1.
Let be the smallest set of ground sentences and actions in with the following properties:
- 1.
- Each atomic p belongs to .
- 2.
- If , then also , , , and belong to .
- 3.
- If , , and , then belongs to .
- 4.
- If , if , …, is a sequence of sequences of length of elements of , and if ,is an action term in .
Lemma 5.2.
There is a function such that for all φ, . Moreover, if , then is a purely modal sentence (it contains no actions).
Lemma 5.3.
There is a well-order < on such that for all φ and α:
- 1.
- .
- 2.
- .
- 3.
- If , then .
Lemma 5.4.
For every φ there is a finite set such that
- 1.
- is closed under subsentences.
- 2.
- If , , and , then also contains , , , and .
The proofs of these will appear in Section 5.2 just below. The proofs are technical, and so the reader not interested in those details might wish to omit the next section on a first reading of this paper. We shall use Lemmas 5.2–5.4 in the work on completeness below, but neither the details of the proofs nor the other results of Section 5.2 will be used in the rest of this paper.
5.2. Proofs of the Main Facts on Normal Forms and the Well-Order <
We turn to the proofs of Lemmas 5.2–5.4, just above. Our proofs are complicated and circuitous, so there might be shorter arguments. For example, we do not know of any proofs that avoid term rewriting theory. For the record, here are some of the reasons why we feel that the study of our system is complicated:
- The original statement of axioms such as the action-knowledge axiom is in terms of actions of the form .
- On the other hand, the action rule is best stated in terms of actions which are compositions of the actions . In a term-rewriting setting, this point and the previous one work against each other. Our work will be to work with the versions of the axioms that are generalized to the case of all simple actions.
- Again mentioning term rewriting, we will need to pick an orientation for the composition axiom. This will either be , or 6. Both alternatives lead to difficulties at various points. We chose the first alternative, and for this reason, we will need a formulation of the Action-Knowledge Axiom as an infinite scheme.
- Our language has the program union operator ⊔, but because the axioms are not, in general, sound for sums, we need to reformulate things to avoid ⊔.
It is convenient to replace by a slightly different language which we call . This new language is shown in Figure 4. For the purposes of this section, we stress the formulation of this as an algebra for a two-sorted signature. Starting with some fixed action signature Σ, we construct a two-sorted signature of terms, obtained in the following way. Let n be the number of simple actions in Σ.
- Δ has two sorts: s (for sentences) and a (for actions).
- Each is a constant symbol of sort s.
- ¬, , and are function symbols of type .
- ∧ and → are binary function symbols of type .
- Each is a function symbol of sort .
- ; is function symbols of sort .
- is a binary symbol of type .
- is a function symbol of sort .
The most important addition here is that we have as a first-class part of the syntax; previously, it had been an abbreviation. We also add the implication symbol →, but this is only for convenience. Obviously, → may be dropped from the system. On the other hand, we dropped ⊔ (as we mentioned, some axioms are not sound as equations in general if we have ⊔). We might as well drop as well since it, too, can be translated away.
Incidentally, the fact that is not a symbol of makes the issue of translating between and delicate. The reader might wish to formulate a careful translation in order to appreciate some of the features of our ordering < which we shall introduce in due course.
We adopt the usual notational conventions that ∧, ↔, and ;, are used as infix symbols. We continue our practice of writing for what technically would be . Also, we write instead of .
When dealing with , we let α, β, etc., range over terms of sort a, and φ, ψ, χ, etc., range over terms of sort s. Finally, we use letters such as t and u for terms of either sort (so as to shorten many of our statements). We also will need to adjoin new variables to our signature in order to formulate the notion of substitution that leads to a term rewriting system. For this, we let and be sets of new symbols. In order to simplify our notation, we will use letters such as x, y, and z to range over both of these sets. That is, we will not notationally distinguish the two sorts of variables. The context will always make it clear what the sort of any given variable is.
Let be the terms built from our signature which now may contain the variables from X. Examples of such terms may be found in Figure 5.
Lemma 5.5.
Let φ be a sentence of . Then there is some which does not contain ⊔, or such that .
Proof.
(J. Sack, personal communication) We define as follows:
The definition is by recursion on the number k of composition symbols (;) in φ. For a fixed k, we then use recursion on the total number of symbols. The overall recursion allows us to define to be . And the ’inside’ recursion on the number of symbols allows us to define in terms of and .
We indicate two of the verifications that our definition works. Here are the details for the line involving . Assuming the relevant induction hypotheses, we see that (see Lemma 4.20, part 2). And then by Lemma 4.22,
Using necessitation, we also have equivalence to .
Some of the other cases use necessitation in this way also. In all cases, the verifications are similar. □
Remark 5.6.
In the remainder of this paper, we shall assume that sentences and actions of do not contain ⊔, or . We also regard them as ground terms of : these are terms without variables.
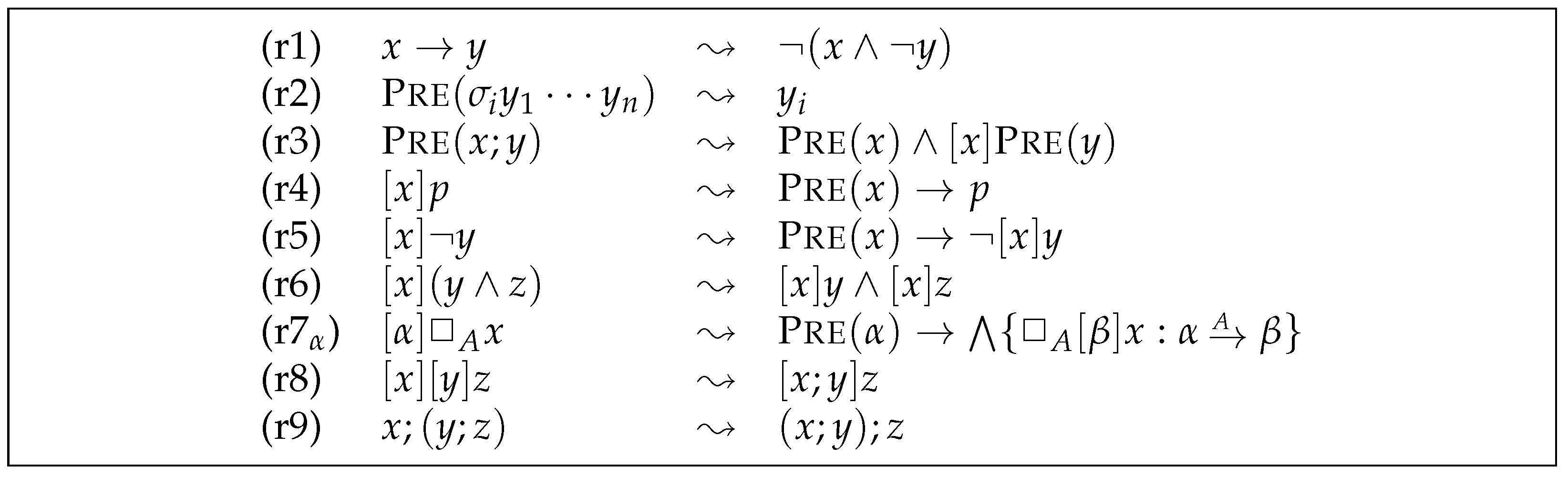
Incidentally, the proof of Lemma 5.5 shows that ; is also eliminable. However, we shall not assume that ; is not found in our sentences. In fact, the rewriting system that we present shortly will introduce compositions.
5.2.1. The Rewriting System and Its Interpretation
We recall here the general notion of term rewriting as it applies to . For more on this topic, especially on the notion of termination, see, e.g., Dershowitz [16]. Consider a rewrite rule (r) of the form , where l and r are elements of . This (r) generates a relation of immediate rewriting on : we say that rewrites to via (r) if there is a term u with exactly one occurrence of a variable x (of either sort) and a substitution σ such that and . That is, and result from u by substituting l and r in for x; however, we need not use l and r literally, but we could as well take a substitution instance of them. We would write for this.
Given a set of rewrite rules, we write if for some , . We naturally consider the transitive closure of . We say that rewrites to via if they stand in this relation .
We are mostly interested in the rewriting of ground terms. But we need the notion of variables to formulate this, and this is the only reason for introducing variables.
Now that we have made this preliminary discussion, we consider the term rewriting system shown in Figure 5. We have numbered the rules, and we use this numbering in the sequel.
Remark 5.7.
(r7) is an infinite scheme, and, in it, is a term of sort a. But need not be an action variable. (Indeed, the scheme is only interesting when is a composition of actions of the form .) The right side of (r7) depends on , and this is why we use a scheme rather than a single rule. We need to explain what it means. First, the action terms of carry the structure of a frame by taking for each A the smallest relation such that the following two conditions hold:
- 1.
- If in , then .
- 2.
- If and , then .
Moreover, we use the notation to stand for some fixed, but arbitrary, rendering of the conjunction as a nested list of binary conjuncts. The order will not matter, but we shall need an estimate of how many conjuncts there are.
We have a length function ℓ on action terms: for variables x, , and . For each α, the number of β such that is at most , where n is the size of Σ. This is easy to check by induction on .
Also on (r7): one is tempted to replace this infinite scheme by the finite one
If one did this, one would have to reverse (r8) to read
The reason is that (r10), above, only allows us to reduce expressions when α is of the form . The problem is that the normal forms of (r1)–(r6) + (r9) + (r10) + (r11) would include terms such as
and these are not suitable for use in connection with the action rule. We will show about our system (r1)–(r9) that its normal forms includes terms such as
Again, this is mainly due to our choice in the direction of (r8).
5.2.2. Our Interpretation
An interpretation of a signature Δ is a algebra. This is a carrier set for the sentences, a carrier set for the actions, and for each n-ary function symbol f of Δ a function of the appropriate sort. In our setting, both carrier sets will be , the set of natural numbers which are at least 3. We shall use a, b, etc., to range over in this section. Our interpretation is shown in Figure 6. By recursion on terms , we build an interpretation 7.
The interpretation of each function symbol is strictly monotone in each argument. (For example, we check this for . For fixed n and m, we consider the functions and . Then, if , and .) So, by induction, each is strictly monotone as a function in each argument.
Lemma 5.8.
Let . For all action terms α, and all maps ι of variables to ,
Proof.
By induction on α. If α is a variable x, then . So . If α is a term of the form , then , and
Now assume our lemma for α and β.
In asserting that , we assume that . If , then our lemma is trivial. □
Proposition 5.9.
If α is an action term of and , then and are the same function. In particular, if α and β are ground action terms, then .
Proof.
By induction on α. The point is that the interpretation of the actions does not use the number i in any way. The rest follows by an easy induction. □
The following proposition is a technical but elementary result on exponentiation. It will be used in Lemma 5.11, below. One might notice that if we replace 3 by 2 in the statement, then some of the parts are no longer true. This is the reason why our overall interpretation uses rather than N or .
Proposition 5.10.
Let .
- 1.
- .
- 2.
- .
- 3.
- .
- 4.
- .
- 5.
- .
Lemma 5.11.
For each of (r1)–(r9), the interpretation of the left side of the rule is strictly larger than the right side on all tuples of arguments in .
Proof.
We remind the reader that letters , etc., denote elements of . We use Proposition 5.10 without explicit mention.
(r1) .
(r2) .
(r3)
(r4) .
(r5)
(r6) .
(r7) Let be the free variables of α. Fix . Let , and let be arbitrary. Then
Notice that we used Proposition 5.9 and our observation that the size of the conjunction on the right side of (r7) is at most .
(r8) .
(r9) . □
Definition 5.12.
Let and be sentences in . We regard these as ground terms in . We write if , where our interpretation is the one in Figure 6. We write if to mean the obvious things.
Theorem 5.13.
is terminating: there are no infinite sequences
Proof.
We recall a standard argument. Assume we had a counter example, an infinite sequence of rewrites. We may assume without loss of generality that each is a ground term. Recall Lemma 5.11 and our observation that each is strictly monotone as a function in each argument. From this, it follows that , and these are all numbers. So we have a contradiction. □
5.2.3. Normal Forms
We remind the reader that we formulated the notions of equivalences of simple actions and also equivalence of sentences of in Section 4.3. We consider now a translation . The definition is by recursion on the well-order <. We take to be a homomorphism for all symbols except . For this, we require the following:
The reason we need recursion on < is that figures in . So we need to know that . Of course, we do not really need the specific < that we constructed for this; for this minor point, we might as well define if φ has fewer symbols than ψ.
Lemma 5.14.
For all action terms α, .
Proof.
By induction on <. The important thing again is that when we write we are using here as a defined symbol. Its recursion equations match the definition of . □
Lemma 5.15.
Let α be a ground action term of . Then,
Proof.
By induction on α. □
Lemma 5.16.
If and are ground terms of such that , then .
Proof.
Let u be a term with exactly one free variable x, and let σ be such that for some i, and . We argue by induction on u. If u is just x, then we examine the rules of the system. All of them pertain to sentences except for (r9), and in the case of (r9) we use Lemma 4.20, part (4). The arguments for the other rules use Lemma 5.14, and we will give the details for two of them, (r3) and (r7).
For (r3),
The infinite scheme (r7) is repeated below:
Recall that α might have variables. What we need to check here is that ground instances of (r7) have equivalent translations. So take a ground sentence of the form . Its translation is . Using the Action-Knowledge Axiom and Lemmas 5.15 and 5.14:
This settles all of the cases in this lemma when u is a variable by itself. In the general case, we need a fact about substitutions. Let t be any term of . Let σ and τ be two ground substitutions (these are substitutions all of whose values contain no variables) such that and are equivalent (actions or sentences) for all variables x. Then, and are again equivalent. The argument here is an easy induction on terms of . It amounts to several facts which we have seen before: ≡ is a congruence for all of the syntactic operations on sentences, and also for those on programs (see Lemma 4.20); equivalent actions have equivalent preconditions (by definition); and if , then (Lemma 4.22). □
A normal form in a rewriting system is a term which cannot be rewritten in the system. In a terminating system such as our , one may define a normal form for a term by rewriting as much as possible in some fixed way (for example, by always rewriting in the leftmost possible way). We shall need some information on the normal forms of , and we shall turn to this shortly.
Near the beginning of Section 5, we defined a set . is the smallest set containing the atomic propositions and closed under all the boolean and modal operators; with the property that if α and φ belong to , then so does for all ; and, finally, that the programs built from sentences in are themselves in (see also (14) for a more complete description of this last closure condition.)
Lemma 5.17.
A ground term is a normal form of if . In particular, and → do not occur in normal forms.
Proof.
An induction on shows that all sentences in are ground terms of and are, moreover, normal forms of the rewriting system : no rules of can apply at any point. Going the other way, we show by induction on that if t is a (ground) normal form, then (regarding t as a sentence or action in ) . The base case and the induction steps for ¬, ∧, , and are all easy. Suppose our result holds for φ, and consider a normal form . Then, α must be an action of the form with all in normal form; if not, some rule would apply to α and, hence, to . We are left to consider an action α. By induction hypothesis, the subsentences of α, too, are normal forms and, hence, belong to . We claim that α must be of the right-branching form in Equation (14). This is because all of the other possibilities are reducible in the system using (r9). □
Lemma 5.18.
A sentence is a normal form of if φ is a modal sentence (that is, if φ contains no actions).
Proof.
By the easy part of Lemma 5.17, the modal sentences are normal forms. In the more significant direction, one first checks by induction on rewrite sequences that if and is reachable from φ by a finite number of rewrites in , then does not appear in . So every normal form of φ is a purely modal sentence. It follows that if φ were a normal form to begin with, then φ would be a modal sentence. □
Corollary 5.19.
For every , there is a normal form such that . Moreover, .
Proof.
Regard φ as a term in . Let
be some sequence of rewrites which leads to a normal form of φ 8. By Lemma 5.16, . But neither φ nor contain or →, so they are literally equal to their translations. Thus, , just as desired. □
Lemma 5.20.
For all φ and α of :
- 1.
- .
- 2.
- If , then .
- 3.
- If is a normal form sentence and , then and are again normal forms.
- 4.
- Every subterm of a normal form is a normal form.
- 5.
- If α is a normal-form action and , then β is a normal-form action as well.
Proof.
Part (1) is an easy calculation. In part (2), we use the fact that and are the same number, by Proposition 5.9. We use the fact here (and here only) that rather than . The remaining parts are also easy using the characterization of normal forms of Lemma 5.17. □
5.2.4. The Function
The last piece of business in this section is to define the function from Lemma 5.4 and then to prove the required properties.
Definition 5.21.
For t, an action or a sentence, let be the set of subsentences of t, including t itself (if t is a sentence). This includes all sentences occurring in actions which occur in and their subsentences. We define a function by recursion on the well-founded relation < as follows:
The definition makes sense because the calls to f on the right-hand sides are all smaller than the arguments on the left-hand sides; see Lemma 5.20.)
Lemma 5.22.
For all :
- 1.
- .
- 2.
- is a finite set of normal form sentences.
- 3.
- If , then .
- 4.
- If , then .
- 5.
- If , , and , then also contains , , , and .
Proof.
Part (1) is by cases on φ. The only interesting case is for , and this is a subsentence of for any .
All of other the parts are by induction on φ in the well-ordered <. For part (2), we use Lemma 5.20.
In part (3), we argue by induction on normal forms.
The result is immediate when φ is an atomic sentence p, and the induction steps for ¬, ∧, and are easy. For , note that since , our induction hypothesis implies the result for φ; we verify it for . When ψ is , then
And then, when ψ is for some , we have
To complete part (3), we consider . If there is some such that and , then we argue as follows: by induction hypothesis, ; and by hypothesis . This covers all of the cases except for ψ a subsentence of . And here, .
In Part (4), we again argue by induction on normal forms. The result is immediate when φ is an atomic sentence p. The induction steps for ¬, ∧, and are easy. For , note that since , our induction hypothesis implies the result for φ; we verify it for . The only interesting case is when ψ is for some . And in this case
To complete part (4), we consider . If there is some such that and , then we are easily done by the induction hypothesis. This covers all of the cases except for ψ of the form or of the form . (If ψ is a subsentence of some β, then directly. If ψ is a subsentence of , then by induction hypothesis, ; and directly, .) For , we use the transitivity of to check that . And now the case of follows:
For part (5), assume that . By part (2), is a normal form. The definition of f implies that , , , and all belong to , and then part (4) tells us that . □
5.2.5. Summary
The purpose of this section was to prove Lemmas 5.2–5.4 in Section 5. Lemma 5.2 is Corollary 5.19. Lemma 5.3 comes from Corollary 5.19 and Lemma 5.20. Lemma 5.4 is contained in Lemma 5.22.
5.3. Strong Completeness for
Recall that in the languages , we do not have the common-knowledge operators or the action iterations . At this point, we can put together several results from our previous work to obtain a completeness theorem for languages of the form . The overall ideas are: (1) we need a logical system which is strong enough to translate each sentence of to a normal form; (2) this normal form will be a purely modal sentence; and (3) the system should be at least as strong as multimodal K.
Proposition 5.23.
Every sentence φ of is provably equivalent to a sentence in which there are no occurrences of ⊔, , ;, or .
Theorem 5.24.
The logical system for is strongly complete: for all sets , iff .
Proof.
The soundness half being easy, we only need to show that if , then .
First, we may assume that the symbols ⊔, , ;, and do not occur in T or φ. Thus, we may work with . In particular, we have normal forms.
Next, for each χ of , . As a result, for all .
Finally, write for . By soundness, . Since our system extends the standard complete proof system of modal logic, . So . As we know, . So we have our desired conclusion: . □
5.4. Weak Completeness for
The proof of completeness and decidability of is based on the filtration argument for completeness of PDL due to Kozen and Parikh [15]. We show that every consistent φ has a finite model, and that the size of the model is recursive in φ. As in the last section, we depend on the results of Lemmas 5.2–5.4.
The Set
Fix a sentence φ. We set (i.e., we drop φ from the notation). This set Δ is the version for our logic of the Fischer–Ladner closure of φ, originating in [17]. Let . Given a maximal consistent set U of , let
where the signs are taken in accordance with membership in U. That is, if , then ψ is a conjunct of ; but if , then is a conjunct.
Two (standard) observations are in order. Notice that if , then is inconsistent. Also, for all ,
and
(The reason is that ψ is equivalent to the disjunction of all complete conjunctions which contain it. However, some of those complete conjunctions are inconsistent and these can be dropped from the big disjunction. The others are consistent and, hence, can be extended to maximal consistent sets.)
Definition 5.25.
We consider maximal consistent sets U in the logic for . Let if (if ). The filtration is the model whose worlds are the equivalence classes in this relation. Furthermore, we set
We complete the specification of a state model with the valuation:
The definitions in Equations (18) and (17) are independent of the choice of representatives: we use part (1) of Lemma 5.4 to see that if , then also .
Proposition 5.26.
If is consistent, then .
Proof.
Assume and toward a contradiction that . Since and , we have . Thus, , and so . Hence is inconsistent. □
Definition 5.27.
Let be a normal form. A good path from for is a path in
such that , each , and such that there exist actions
such that for all , and .
The idea behind a good path comes from considering Lemma 4.11 in . Of course, the special case of that result would require that rather than , and similarly for and . The exact formulation above was made in order that the Truth Lemma will go through for sentences of the form (see the final paragraphs of the proof of Lemma 5.30).
Lemma 5.28.
Let . If there is a good path from for , then .
Proof.
By induction on the length k of the path. If , then . If , then . By Lemma 5.4, part (2), we have . This is a contradiction.
Assume the result for k, and suppose that there is a good path from for of length . We adopt the notation from (19) for this good path. Then there is a good path of length k from for . Also, , by Lemma 5.4, part (2). By induction hypothesis, .
If , then . contains . (That is, this sentence is valid by Lemma 4.21, part (2). Hence, it belongs to every maximal consistent set.) So contains . This sentence belongs to Δ by Lemma 5.4, part (2). Now by definition of in , we see that . This is a contradiction to our observation at the end of the previous paragraph. □
Lemma 5.29.
If is consistent, then there is a good path from for .
Proof.
For each β such that , let be the (finite) set of all such that there is no good path from for . We need to see that ; suppose toward a contradiction that . Let
Note that is logically equivalent to . Since we assumed , we have .
We first claim for β such that , is inconsistent. Otherwise, there would be such that . Note that, by the partial-functionality axiom, . But then the one-point path is a good path from for . Thus, , and this is a contradiction. So indeed, is inconsistent. Therefore, .
We next show that for all and all β such that , is inconsistent. Otherwise, there would be with , , and in it. Then, , being equivalent to , would belong to W. It follows that for some . By Proposition 5.26, . Since , there is a good path from for . But since and W contains , we also have a good path from for . This again contradicts . As a result, for all relevant A, β, and γ,
By the Action Rule, . Now . So . This contradicts the assumption with which we began this proof. □
Lemma 5.30 (Truth Lemma).
Consider a sentence φ, and also the set . For all and : if .
Proof.
We argue by induction on the well-founded < that if , then: if . The case of χ atomic is trivial. Now assume this Truth Lemma for sentences . Recall that , our set of normal forms (see Section 5.2.3). We argue by cases on χ.
The cases that χ is either a negation or conjunction are trivial.
Suppose next that . Suppose ; we show . Let be such that . Then by definition of , . The induction hypothesis applies to ψ, since , and since by Lemma 5.4, part (1). So by induction hypothesis, . This gives half of our equivalence. Conversely, suppose that . Suppose towards a contradiction that . So is consistent. We use Equation (16) and the fact that distributes over disjunctions to see that is logically equivalent to , where the disjunction is taken over all V which contain . Since is consistent, one of the disjuncts must be consistent. The induction hypothesis again applies, and we use it to see that . By Proposition 5.26, . We conclude that , and this is a contradiction.
For χ of the form , we use the standard argument for PDL (see Kozen and Parikh [15]). This is based on lemmas that parallel Lemmas 5.28 and 5.29. The work is somewhat easier than what we do below for sentences of the form , and so we omit these details.
We conclude with the case when χ is a normal form sentence of the form . Assume that . First, suppose that . Then, by Lemma 5.29, there is a good path from for . We want to apply Lemma 4.11 in to assert that . Let k be the length of the good path. For , . Now each belongs to Δ by Lemma 5.4, part (2), and is . So by induction hypothesis, . By soundness, . We also need to check that . For this, recall from Lemma 5.3 that Δ contains . Since the path is good, contains ; thus, it contains ; and, finally, it contains . By induction hypothesis, . By soundness, . Thus, . Now it does follow from Lemma 4.11 that .
Going the other way, suppose that . By Lemma 4.11, we obtain a path in witnessing this. The argument of the previous paragraph shows that this path is a good path from for . By Lemma 5.28, U contains . This completes the proof. □
Theorem 5.31 (Completeness).
For all φ, if . Moreover, this relation is decidable.
Proof.
By Lemma 5.2, . Let φ be consistent. By the Truth Lemma, holds at some world in the filtration . So has a model; thus, φ has one, too. This establishes completeness. For decidability, note that the size of the filtration is computable in the size of the original φ. (Another proof of decidability: we show in Section 6.1 that can be translated into propositional dynamic logic (PDL) fairly directly, and that logic is decidable. Neither argument gives a good estimate of the complexity.) □
5.5. Extensions to the Completeness Theorem
We briefly mention extensions of the Completeness Theorem 5.31.
First, consider the case of S5 (or K45) actions. We change our logical system by restricting to these S5 actions, and we add the S5 axioms to our logical system. We interpret this new system on S5 models. It is easy to check that applying an S5 action to an S5 model gives another S5 model. Further, the S5 actions are closed under composition. Finally, if α is an S5 action and , then β also is an S5 action. These easily imply the soundness of the new axioms. For completeness, we need only check that if we assume the S5 axioms, then the filtration from the previous section has the property that each is an equivalence relation. This is a standard exercise in modal logic (see, e.g., Fagin et al. [18], Theorem 3.3.1).
Second, we also have completeness not only for the languages , but also for the languages in [6] that are constructed from families of action signatures. This construction is most significant in the case when is an infinite set of signatures; for example, might contain a copy of every finite signature. In that setting, the language would not be the language of any finite signature. But for the (weak) completeness result of this section, the advantage of the extended definition is lost. The point is that for single sentences, we may restrict attention to a finite subset of . And for finite sets , is literally the language of the coproduct signature
We already have completeness for such languages.
Our final extension concerns the move from actions as we have been working with them to actions which change the truth values of atomic sentences. If we make this move, then the axiom of Atomic Permanence is no longer sound. However, it is easy to formulate the relevant axioms. For example, if we have an action α which effects the change , then we would take an axiom . Having made these changes, all of the rest of the work we have done goes through. In this way, we get a completeness theorem for this logic.
Endnotes
6. Results on Expressive Power
In this section, we study a number of expressive power issues related to our logics. The four subsections are for the most part independent.
6.1. Translation of into PDL
In this section, Σ is an arbitrary action signature. In Section 5.2.3, we saw normal forms for and . We showed in that section that every sentence in is provably equivalent to its normal form, and the normal forms of sentences of are exactly the purely modal sentences. This proves that in terms of expressive power, is equivalent to , ordinary modal logic.
Further, we can show that and, indeed, the full language is a sublogic of , the extension of modal logic with countable Boolean conjunction and disjunction. The idea is contained in the following clauses:
It is natural to ask whether there are any finite logics which have been previously studied and into which our logics can be embedded. One possibility is the Modal Iteration Calculus () introduced in Dawar, Grädel, and Kreutzer [19]. The full language is a sublanguage of ; see [14] for details. It is likely that this result extends to all other finite action signatures. In another direction, we ask whether the fragments are sublogics of previously studied systems.
Theorem 6.1.
Every sentence of is equivalent to a sentence of PDL.
Proof.
(Sketch) We argue by induction on the well-order < introduced and studied in Section 5. It is sufficient to show that each sentence in the set of normal forms of is equivalent to a sentence of PDL. (The normal forms were introduced in Section 5.2.3, and the reader may wish to look back at Lemma 5.17.) We just give the main induction step.
Suppose that is a normal-form sentence. Our induction hypothesis implies that each is equivalent to some PDL sentence . We shall show that is itself equivalent to some PDL sentence; hence, also has this property. For this, we use the semantic equivalent given in Lemma 4.11. Recall first that there are only finitely many β such that . Let X be the (finite) set of all such β such that . That is, the actions β reachable from α by a path labeled by agents in the set . We consider X as a sub-action structure of Ω.
We consider , and we assume that this union is disjoint. We consider the set of all finite words on this set. We are interested in finite -labeled paths through X beginning at α and ending at an arbitrary element of X. At this point, we shall develop our proof only by example.
Suppose that and that , with , , and . Then one of the paths of interest would be
(Note that this corresponds to .) We are only interested in paths that respect the structure of Ω. By Kleene’s Theorem, the set P of finite paths of this type beginning at our fixed action α is a regular language on . In our example, P is given by the regular expression
With each such regular expression we associate a PDL program that represents it. In our example, we would have
(The notation means the PDL translation of ; such a PDL sentence exists since .) Again, this is a PDL program whose denotation in a state model is the set of pairs of states such that there is a path
and also a sequence of actions of the same length k,
such that each , each for all , and, finally, such that . Consider now the PDL sentence . (As above, means the PDL translation of . This exists because ; see Lemma 5.17.) A state s satisfies in if there is some such that . Putting together our description of with this, we see that iff ; see Lemma 4.11. □
Remark 6.2.
At this point, we know that is a sublogic of PDL. So it is interesting to ask whether this extends to the full logic ; recall that this last language has the operation of program iteration . It turns out that lacks the finite-model property even when Σ is as simple as the signature of public announcements and, indeed, when the only sentence announced publically and repeatedly is (see Section 6.4, below). Since PDL has the finite model property, we see that is not a sublogic of PDL. In fact, it also shows that is not even a sublogic of the modal mu-calculus.
6.2. Is More Expressive Than
Recall that in this paper is multi-agent modal logic together with the common-knowledge operators for sets of agents. Our main result here is that is strictly weaker than , the logic obtained by adding public announcements to .
We define a rank on sentences from . Let for p atomic, , , , for all , and for all .
6.2.1. Games for
The main technique in the proof is an adaptation of Fraisse–Ehrenfeucht games to the setting of modal logic. Let and be states; i.e., model-world pairs. By recursion on the natural number n, we define a game . For , immediately wins if the following holds: for all , if . And if s and t differ on some atomic sentence, I immediately wins. Continuing, here is how we define . As in the case of the games, we first check if s and t differ on some atomic sentence. If they do, then I immediately wins. Otherwise, the play continues. Now I can make two types of moves.
- A -move: I has a choice of playing from or from , and also some agent A. If I chooses , then I continues by choosing some such that in . Then replies with some such that . Of course, if I had chosen in , then would have chosen in S. Either way, points and are determined, and the two players then play .
- A -move: I plays by selecting (or , but we ignore this symmetric case below), and some set of agents, and then I continues by playing some (say) reachable from s in the reflexive-transitive closure of ; responds with a point in the other model, , which is similarly related to t.
We write if has a winning strategy in the game . It is easy to check that by induction on m that if and , then .
Proposition 6.3.
If , then for all φ with , if .
The proof is standard, except perhaps for the easy extra step for moves.
We have two results that show that public announcements add expressive power to . The first is for one agent on arbitrary models, and the second is for two agents on equivalence relations.
In the first result, let be a singleton . We drop the A from the notation.
Theorem 6.4.
The sentence is not expressible in , even by a set of sentences.
Proof.
Fix a number n. We first show that is not expressible by any single sentence of of rank n. Let be the cycle
We set p to true everywhere except and q true only at .
Announcing p means that we delete . So, splits into two disjoint pieces. This means that in , does not satisfy . But does satisfy it.
We show that and agree on all sentences of of rank . For this, we show that has a winning strategy in the n-round game on between and . Then we appeal to Proposition 6.3. ’s strategy is as follows: if I ever makes a move, should make a move on the other side to the exact same point. (Recall that is a cycle.) Thereafter, should mimic I’s moves exactly. Since the play will end with the same point in the two structures, wins. But if I never makes a move, the play will consist of n⋄-moves. should simply make the same moves in the appropriate structures. Since is steps from , and is steps from , will win the play in this case.
So at this point we conclude that for all n, is not expressible by any single sentence of of rank n. We conclude by extending this to show that is not expressible by any set of sentences of . Suppose towards a contradiction that were equivalent to the set . Consider the following models and : ; i.e., take the disjoint union of the models , and then identify all points . We also rename the common point to be a, and we take this as the distinguished point. So we consider . Similarly, let . For clarity we will rename each point to be . And we write b for the distinguished point of . The construction insures that and .
By definition of T, for all . Let be such that . Let . Let
Notice that we switched exactly one of the identified points. Just as before, we will rename the points of and call the overall distinguished point c. It is easy to check that . And since this sentence is equivalent to T, we also have . But we now show that and agree on all sentences of rank . This implies that , giving the needed contradiction.
Here is a winning strategy for in the m-round game between and . If I opens with anything besides or , should play the corresponding point on the other side and, thereafter, play in the obvious way. If I opens with , should play with and, thereafter, play with basically the same strategy as in the first part of this theorem; similarly, if I opens with , should reply and, thereafter, play via the strategy in the first part of this proof, where we dealt with single sentences. □
6.2.2. Partition Models
Often in epistemic logic one is concerned with models in which every accessibility relation is an equivalence relation. We can obtain a version of Theorem 6.4 which shows that even on this smaller class of models, public announcements add expressive power to . However, we must use two agents: with one agent and an equivalence relation is equivalent to . Thus, every sentence in on one-agent equivalence relations is equivalent to a purely modal sentence.
Theorem 6.5.
The sentence is not expressible by any set of sentences of , even on the class of models in which and are equivalence relations.
Proof.
We fix a number N and first show that is not expressible by any single sentence of of rank N. Let n be the smallest even number strictly larger than N. Let be as defined in Section 3.2 above. Note that does have the property that and are equivalence relations. In addition, is the same relation as . So, is equivalent to (and similarly for B). Finally, is the universal relation. So if any point whatsoever satisfies a sentence , then all points satisfy it.
The analysis of Section 3.2 shows that the points and differ on our sentence .
We continue by showing that has a winning strategy in the n-round game on from and . If I ever makes a move, then should move to the same point and, thereafter, mimic I perfectly. Thus, we may assume that I never makes any moves. In this case, I will never move either point to , , or . In other words, all points in the play will satisfy . So, as long as I plays ⋄-moves, can follow arbitrarily. Once again, since the game goes for n rounds, this will be a winning strategy.
At this point we know that is not expressible by any single sentence of of rank . We use the same idea as in Theorem 6.4 to show that is not expressible by any set of sentences of . In fact, virtually the same proof goes through. □
6.3. Is More Expressive Than
It is natural to assume that privacy adds expressive power to logics of communication. The result of this section is the first result we know that establishes this. In it, we assume that our set of agents is the doubleton .
Theorem 6.6.
The sentence χ of from (8) and repeated below
cannot be expressed by any sentence of , and cannot be expressed by any set of sentences of .
We define a function on : for p atomic, , , , , for all , and .
Lemma 6.7.
Let , and let . If , then
Proof.
By induction on φ. The base step for atomic p and the induction steps for the Boolean connectives are all trivial.
Here is the induction step for . Fix k with . Thus, . We prove the needed equivalences in a cycle.
Assume first that . The only arrows from a in are to and . If , then the reflexive arrow on and the induction hypothesis show that . If , then clearly via .
Second, assume that . We show that . Notice that one of the following holds: , , or . The first case is handled easily by the induction hypothesis. In the second, we have by (9) that ; hence . We are left with the case . Since , the induction hypothesis implies that . Since , .
Finally, assume that . We verify that . In view of the fact that in , one of the following holds: , , or . The only important case is the last. Since , our induction hypothesis implies that in this case, , as desired.
We continue with the induction step for . Recall that . Since we assume , we have . There are no B-arrows from or from a. All three needed statements in our lemma are false, so all three are equivalent.
Next, we have the induction step for , where is either , , or . With two agents, can be , or here. Note that is already transitive, so all the work for has been done above already. Also, is a subrelation of in both and . Thus, we only need to work with in this induction step.
Assume first that . There are a number of cases. If , then by induction hypothesis, . So, as well. The other case is where , , and x is among the points b, , …, . Note in this case that as well: all non-null paths from a go through b, and . Thus, in this case, we have .
Next, assume that . Let x be such that and . Clearly, . By (9), . Also, . So .
Suppose, finally, that . If , then by induction hypothesis we have . So, in this case, as well. The other case is where for some . By (9) again, . And in , . Thus , as desired.
The most interesting step is the induction step for . Fix k with . Thus, , and our induction hypothesis applies to both φ and ψ. In particular, the following are equivalent:
Let us save on some notation by defining
and, similarly, for . Moreover
A similar equation holds for .
Case I: . Since , we have by (20) that , and . So, automatically, all three of the relevant model-world pairs satisfy our sentence .
Case II: and . Then by induction hypothesis, , and , and by (9), . In and , each point satisfies p and has no -successors, and every point has an -successor (itself). Thus, the following are equivalent:
In more detail, the three model-world pairs above are all bisimilar to a one-point model which is a point satisfying p with a loop for . Hence, we have (22). This implies that the following are indeed equivalent:
Case III: , , and for some ℓ such that , . We take the smallest such ℓ. Since , . So by induction hypothesis. Thus, . Let . Then . The point in the updated model has A arrows only to itself and to . Indeed, the model is
![Logics 01 00006 i001]()

What we have drawn is the part of the model accessible from the points shown. We also have not drawn the reflexive A arrows. Notice that there are no B arrows whatsoever. As before, p is true at all points accept . This model is bisimilar to
![Logics 01 00006 i002]() Again, we have omitted the A loops on both points. The same happens with ; the edge in does not change things. Note that the bisimulations relate to . The bisimulation shows the same equivalences (22) which we saw above, and this leads to the desired equivalences in (23).
Again, we have omitted the A loops on both points. The same happens with ; the edge in does not change things. Note that the bisimulations relate to . The bisimulation shows the same equivalences (22) which we saw above, and this leads to the desired equivalences in (23).

Case IV: , , and for all ℓ such that , . That is, φ holds at all worlds of . Recall that . So our induction hypothesis tells us that the following are equivalent
In this case, the models and are isomorphic, via . That is, we are making a public announcement of a sentence φ that holds at all worlds of our model . But in this case we claim that φ is also true at all worlds x of . This follows from (9) for , and for it follows from (20) and the first assumption in this case. So and are isomorphic, again via . Thus, we have the equivalences in (22). These, together with those in (20), imply those in (23), once again.
This completes the induction, and, hence, the proof of our lemma. □
It follows from what we have seen that our sentence is not equivalent to any single sentence of . We would like to see that some sentence of is not equivalent to any set of sentences of . For this, we add a and consider . We begin with a general model-theoretic construction which will be used in the remainder of this section.
Definition 6.8.
Let I be any set; let ; and for each , let be a model-world pair. Let h be a new world. Take disjoint copies of the ’s and add an A arrow from h to each . All other arrows are within the ’s and stay the same as in . No atomic sentences are true at h. Atomic sentences true in the worlds belonging to the copy of in are precisely those true at the corresponding worlds of .
Lemma 6.9.
Let φ be a sentence in . Let I be any set, and for , let and be model-world pairs. Assume that for all , and agree on all with . Then, and agree on φ.
Proof.
By induction on φ. It is clear for atomic sentences. The induction steps for Boolean connectives are trivial. We omit the easy arguments for the induction steps for ⋄ and with various subscripts. It remains to consider the case when . (The cases where we announce to or to are similar.) Fix I, and and for , and assume that these agree on sentences ψ with . In particular, for each , if and only if . Let
For , let and be obtained by “updating and by ”. That is,
and similarly for . By our semantics of public announcements for all , and agree on . Therefore, by our inductive hypothesis
However,
and
and we are done. □
At long last, we complete the proof of Theorem 6.6.
Recall that χ is . Assume towards a contradiction that the sentence at the end of our theorem, , was equivalent to a set Φ of sentences in . Let N be the set of natural numbers . For each , consider and from Definition 3.1. Let . In this notation, . Also, writing for a, we also have . Moreover, for all i, and agree on sentences of of rank . (We are using Lemma 6.7 with .)
We consider from above, with the new point being called s. Notice that . So, we have some such that . Let . Let be for , and let be . Then, for all i, and agree on all sentences ψ of with . By Lemma 6.9, and agree on . (In this, is the new point in .) This tells us that . A fortiori, . Since in this model, we see that . But this contradicts a fact which we recalled above.
6.4. Lacks the Finite-Model Property
We conclude with a result on iterating epistemic actions. We gave a semantics of sentences of the form earlier in the paper. The ability to iterate actions is useful in algorithms and even in informal presentations of scenarios. As it happens, the iteration operation on actions makes our systems quite expressive, so much so that the finite-model property fails for as soon as Σ contains public announcements.
Proposition 6.10.
is satisfiable, but not in any finite model.
Proof.
A state s in a model is called an end state if s has no successors. For each model , let be the same model, except with the end states removed. is isomorphic to what we have written earlier as , that is, the result of publically announcing that some world is possible. So we see that our sentence holds of s just in case the following holds for all n:
- , the n-fold application of the derivative operation to .
- s has some child which is an end node (and, hence, t would not belong to ).
It is clear that any model of must be infinite, since the sets are pairwise disjoint and non-empty.
There are well-known models of . One would be the set of decreasing sequences of natural numbers, with if t is a one-point extension of s. The end nodes are the sequences that end in 0. For each n, is the submodel consisting of the sequences which end in n. □
This has several dramatic consequences for this work. First, it means that the logics cannot be translated into the modal mu-calculus, since that logic is known to have the finite-model property. More importantly, we have the following extension of this result:
Theorem 6.11.
(Miller and Moss [14]). Concerning :
- 1.
- is -complete.
- 2.
- is -complete.
Indeed, these even hold when is replaced by small fragments, such as the fragment built from , , ⋄, and Boolean connectives (yet without atomic sentences); or, the fragment built from arbitrary iterated relativizations and modal logic (without ). These negative results go via reduction from domino problems.
The upshot is that logics which allow for arbitrary finite iterations of epistemic actions are not going to be axiomatizable.
We feel that our results on expressive power are just a sample of what could be done in this area. We did not investigate the next natural questions. These questions have to do with notions of “suspicion” and “common knowledge of suspicion”. It would take us too far afield to mention them here, but one could see, for example, Refs. [6,21] for precise definitions. Do announcements with suspicious outsiders extend the expressive power of modal logic with all secure private announcements and common knowledge operators? And, then, do announcements with common knowledge of suspicion add further expressive power?
6.5. Conclusions
This paper advanced the subject of dynamic epistemic logic (DEL) by introducing logical systems for the logical languages which it studied and also by obtaining a number of results about those logical systems. Prior to this paper, there had been logical systems: see, for example, [1,2,3,4]. These were mainly interested in what has become known as public-announcement logic (PAL), and while these papers point out forcefully that common knowledge was an important topic for the area, they did not obtain completeness theorems for PAL with common knowledge. Our advance on these was (a) to add to PAL the ability to express a much wider array of epistemic actions; (b) to use action signatures in the syntax, and updates, program models, and the update product in the semantics; and (c) to obtain the completeness of the all the logical systems proposed, including common-knowledge operators. This paper did not go into much detail on why one would want to add epistemic operators beyond public announcement; this was done in [6,21] and many other papers. It did formulate logical systems as desired; a look at the first three sections of this paper shows that this formulation takes a lot of work. It also obtained the completeness results for these logical systems, and it did so by calling on results on the canonical action model and also results in term rewriting theory. Those particular results have not been superseded: while others (for example, [7]) have obtained completeness theorems, the logics involved were different, and the proofs also were different. As a final contribution, this paper was perhaps the first to obtain expressive-power results. In addition to being mathematically interesting, they suggest that the large amount of work needed to formulate the syntax and semantics of the logics in this paper is worthwhile. For example, since the logic of private announcements goes beyond what could be expressed in PAL, one really needs a bigger logical system if one wants a general account of private announcements.
An early version of this paper, and several other papers, played an important part in advancing the DEL area. At the present time (2023), there are over 1000 references to [5], the first version of this paper. It is beyond anyone’s ability to look at all of them, regardless of how (or even whether) they used the ideas here or modified them. We know that many of the important contributions to the area of dynamic epistemic logic (broadly conceived) do go beyond what we did here. They modify the overall framework, and they aim at applications which go beyond what one could treat using what we did. Still, we maintain that the published (and unpublished) preliminary versions of this paper made an important contribution to the area. We also think that the current, more polished version is a smaller but still significant further contribution, adding both more technical results and a better, clearer formulation of the main concepts and setting of contemporary dynamic epistemic logic.
Author Contributions
Writing—original draft, A.B., L.S.M. and S.S.; Writing—review & editing, A.B., L.S.M. and S.S.; Supervision, A.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by grant #586136 from the Simons Foundation.
Acknowledgments
We are grateful to three anonymous reviewers for comments and criticism. Certainly, their work improved this paper. All remaining shortcomings are our own. We thank Valentin Goranko for encouraging us to publish our paper in the first place and for his great patience with us.
Conflicts of Interest
The authors declare no conflict of interest.
| 1 | |
| 2 | As the authors of [9] admit: “We have found no practical use for these [complex combinations of agent accessibility relations] at present”. It is true that they go on to argue that, as a result of our more restrictive syntax, “it’s completeness theorem [from [5]] is correspondingly messy”. However, the additional complications of our proof are mainly due to our choice of a strictly “syntactic syntax”, and partly to the explicit rewriting work (taken for granted in [9]), and only in small part due to our restricted static base |
| 3 | We are writing relational composition in left-to-right order in this paper |
| 4 | Note that basic actions are just syntactic expressions, in contrast to the signature-based program models in Section 2.2, which came with a list of epistemic propositions (which we wrote using boldface letters ). Also note that basic actions might not be “atomic” in the sense that the sentences might themselves contain programs |
| 5 | These are Kripke frames similar to our signatures, with the difference that one requires that only finitely many action types are reachable from a given action type via any concatenations of arrows. The definition of the languages is significantly more complex for locally finite signatures, so in this paper we restrict our signatures to finite ones only |
| 6 | Another possibility which we did not explore is to consider rewriting modulo the identity |
| 7 | We use the same symbol ⟦ ⟧ for our interpretation as we used for the valuation in a state model in Section 2.1. Since our use of interpretations is confined to this section of the paper, we feel that the confusion due to overloading the symbol ⟦ ⟧ should be minimal |
| 8 | It does not matter which sequence or which normal form is chosen |
References
- Plaza, J. Logics of public communications. In Proceedings of the 4th International Symposium on Methodologies for Intelligent Systems, Charlotte, NC, USA, 12–14 October 1989. [Google Scholar]
- Gerbrandy, J. Dynamic epistemic logic. In Logic, Language, and Information; Moss, L.S., Ed.; CSLI Publications, Stanford University: Stanford, CA, USA, 1999; Volume 2. [Google Scholar]
- Gerbrandy, J. Bisimulations on Planet Kripke. Ph.D. Thesis, University of Amsterdam, Amsterdam, The Netherlands, 1999. [Google Scholar]
- Gerbrandy, J.; Groeneveld, W. Reasoning about information change. J. Logic Lang. Inf. 1997, 6, 147–169. [Google Scholar] [CrossRef]
- Baltag, A.; Moss, L.S.; Solecki, S. The logic of common knowledge, public announcements, and private suspicions. In Proceedings of the TARK-VII (Theoretical Aspects of the Rationality and Knowledge) Conference, Evanston, IL, USA, 22–24 July 1998. [Google Scholar]
- Baltag, A.; Moss, L.S. Logics for epistemic programs. Synthese 2004, 139, 165–224. [Google Scholar] [CrossRef]
- van Ditmarsch, H.; van der Hoek, W.; Kooi, B. Synthese Library. In Dynamic Epistemic Logic; Springer: Berlin/Heidelberg, Germany, 2007; Volume 337. [Google Scholar]
- Baltag, A.; Moss, L.S.; Solecki, S. The logic of common knowledge, public announcements, and private suspicions. In Readings in Formal Epistemology; Costa, H.A., Ed.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 773–812. [Google Scholar]
- van Benthem, J.; van Eijck, J.; Kooi, B. Logics of Communication and Change. Inf. Comput. 2006, 204, 1620–1662. [Google Scholar] [CrossRef]
- Alexandru, B.; Renne, B. Dynamic Epistemic Logic. In The Stanford Encyclopedia of Philosophy (Winter 2016 Edition); Zalta, E.N., Ed.; Stanford University: Stanford, CA, USA, 2016; Available online: https://plato.stanford.edu/archives/win2016/entries/dynamic-epistemic (accessed on 2 March 2023).
- Van Ditmarsch, H.; van der Hoek, W.; Kooi, B. Internet Encyclopedia of Philosophy. In Dynamic Epistemic Logic; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Moss, L.S.; Logic, D.E. Handbook of Epistemic Logic; van Ditmarsch, H., Halpern, J.Y., van der Hoek, W., Kooi, B., Eds.; College Publications: London, UK, 2015; pp. 261–312. [Google Scholar]
- van Eijck, J.; Sadzik, T. Action emulation. Synthese 2012, 185, 131–151. [Google Scholar] [CrossRef]
- Miller, J.S.; Moss, L.S. The undecidability of iterated modal relativization. Stud. Log. 2005, 79, 373–407. [Google Scholar] [CrossRef]
- Kozen, D.; Parikh, R. An elementary proof of the completeness of PDL. Theor. Comput. Sci. 1981, 14, 113–118. [Google Scholar] [CrossRef]
- Dershowitz, N. Termination of rewriting. J. Symbolic Comput. 1987, 3, 69–115. [Google Scholar] [CrossRef]
- Fischer, M.J.; Ladner, R.E. Propositional modal logic of programs. J. Comput. System Sci. 1979, 18, 194–211. [Google Scholar] [CrossRef]
- Fagin, R.; Halpern, J.Y.; Moses, Y.; Vardi, M.Y. Reasoning About Knowledge; MIT Press: Cambridge, MA, USA, 1996. [Google Scholar]
- Dawar, A.; Grädel, E.; Kreutzer, S. Inflationary fixed points in modal logic. Acm Trans. Comput. Log. 2004, 5, 282–315. [Google Scholar] [CrossRef]
- Van Eijck, J. Reducing Dynamic Epistemic Logic to PDL by Program Transformation; University of Amsterdam: Amsterdam, The Netherlands, 2004; Available online: https://staff.fnwi.uva.nl/d.j.n.vaneijck2/papers/04/pdfs/delpdl.pdf (accessed on 2 March 2023).
- Baltag, A.; Van Ditmarsch, H.; Lawrence, S. Moss, Epistemic Logic and Information Update. In Handbook of the Philosophy of Information; Adriaans, P., van Benthem, J., Eds.; Elsevier: Amsterdam, The Netherlands, 2008; pp. 369–463. [Google Scholar]
Figure 1.
The language and its semantics, and the fragments , and .

Figure 2.
The model omitting the reflexive A-arrows. The model adds the arrow .

Figure 3.
The logical system for . For , we drop the * axioms and rules. The definition of , and in the action rule is given in Section 3.4.
Figure 3.
The logical system for . For , we drop the * axioms and rules. The definition of , and in the action rule is given in Section 3.4.

Figure 4.
The language .

Figure 5.
The rewrite system .

Figure 6.
The interpretation.

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Baltag, A.; Moss, L.S.; Solecki, S. Logics for Epistemic Actions: Completeness, Decidability, Expressivity. Logics 2023, 1, 97-147. https://0-doi-org.brum.beds.ac.uk/10.3390/logics1020006
AMA Style
Baltag A, Moss LS, Solecki S. Logics for Epistemic Actions: Completeness, Decidability, Expressivity. Logics. 2023; 1(2):97-147. https://0-doi-org.brum.beds.ac.uk/10.3390/logics1020006
Chicago/Turabian StyleBaltag, Alexandru, Lawrence S. Moss, and Sławomir Solecki. 2023. "Logics for Epistemic Actions: Completeness, Decidability, Expressivity" Logics 1, no. 2: 97-147. https://0-doi-org.brum.beds.ac.uk/10.3390/logics1020006