



Drones 2024, 8(2), 59; https://0-doi-org.brum.beds.ac.uk/10.3390/drones8020059 - 08 Feb 2024
Viewed by 1022
Abstract
►
Show Figures
Whirl flutter is a phenomenon caused by an aeroelastic instability, causing oscillations to propagate in manned or unmanned rotor-nacelle type aircraft. Under the conditions where multi-segmented freeplay are present, complex behaviors can dominate these oscillations and can lead to disastrous consequences. This study
[...] Read more.
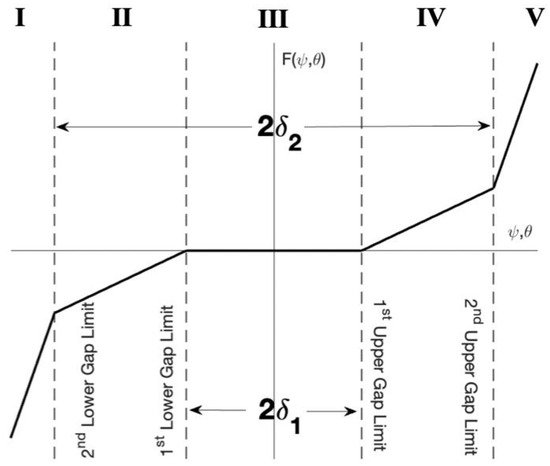
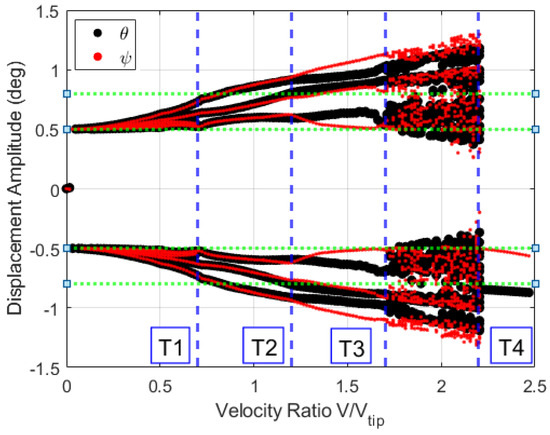
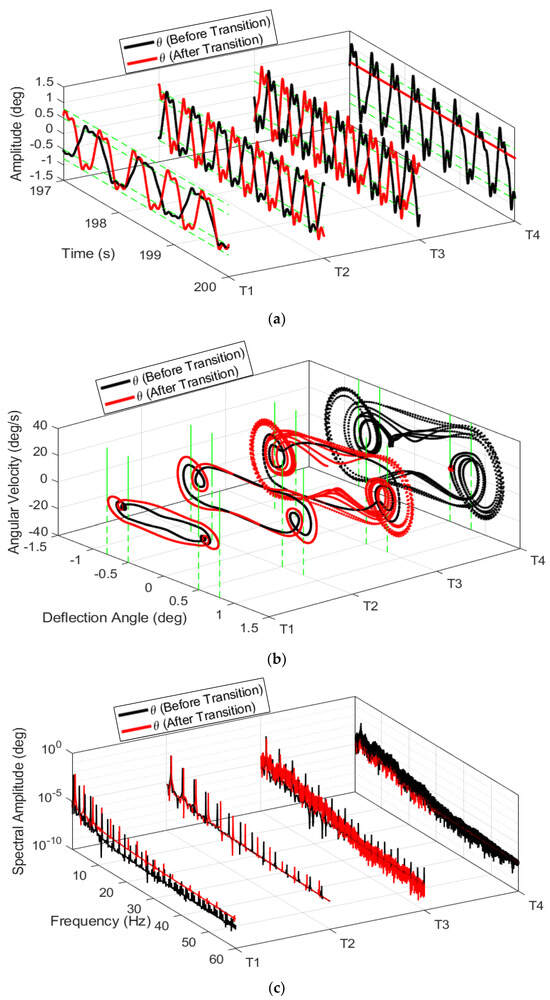
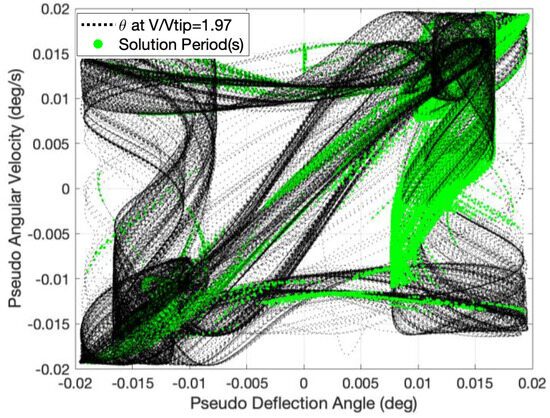
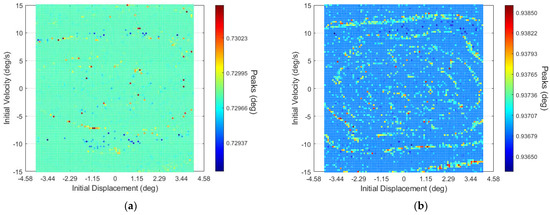
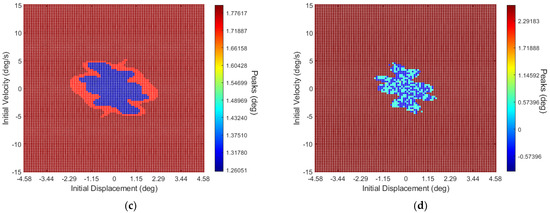
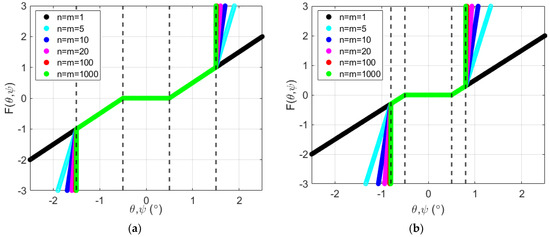
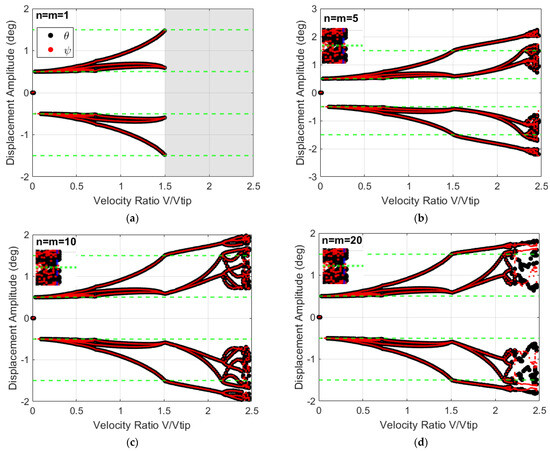
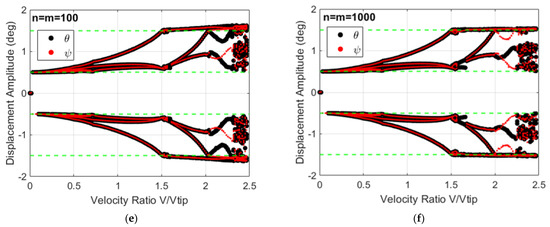
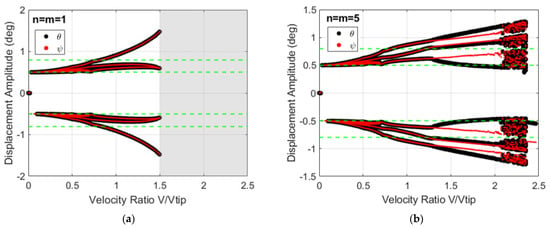
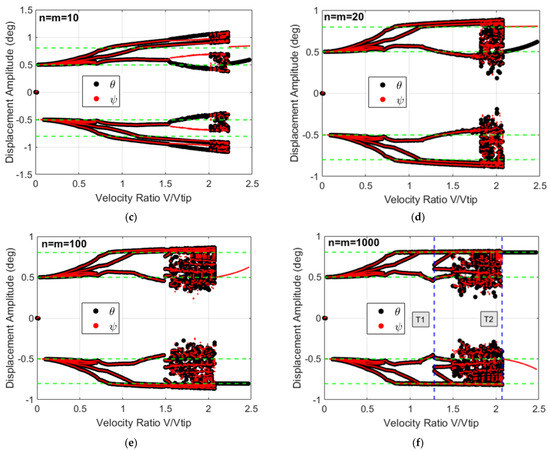
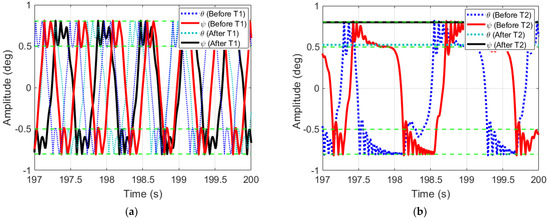
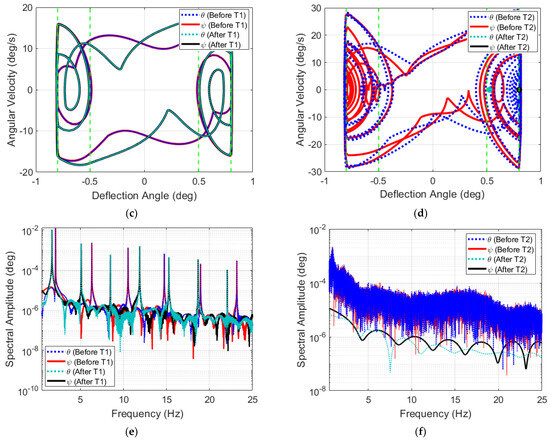
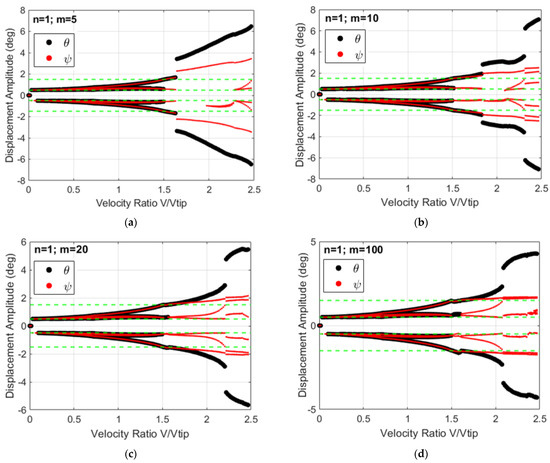
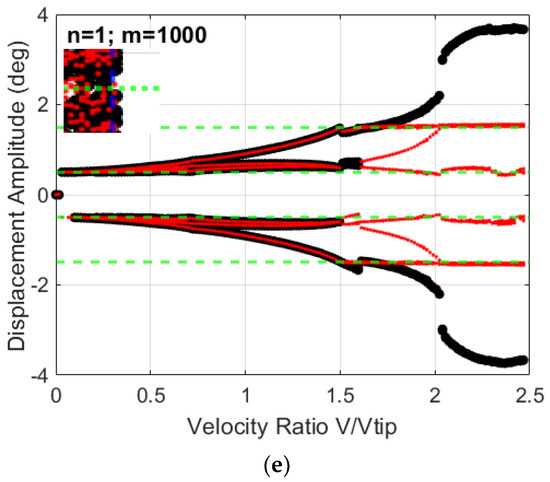
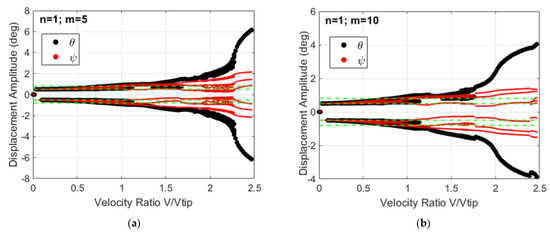
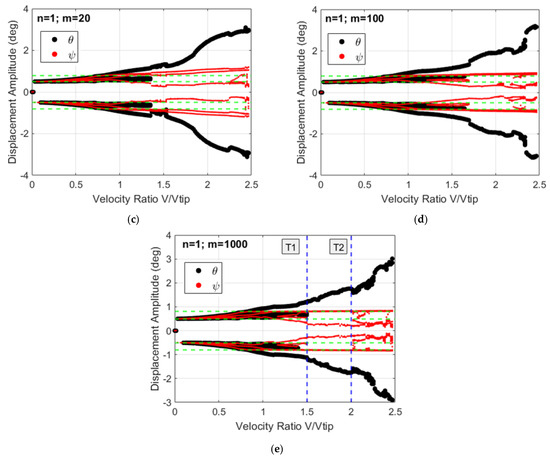
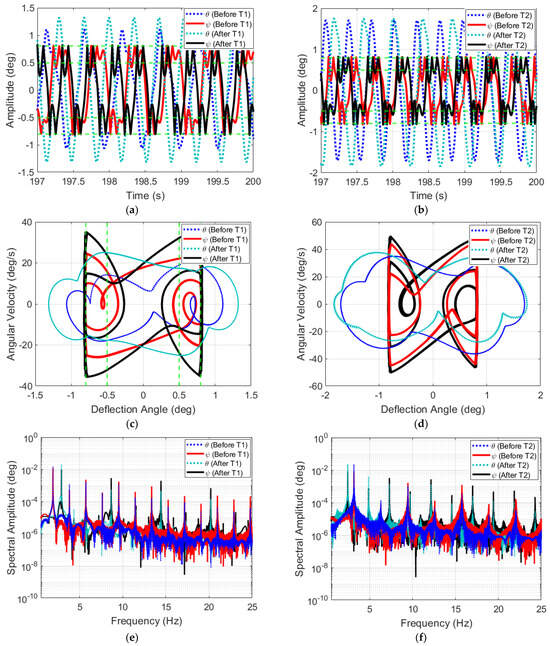
Whirl flutter is a phenomenon caused by an aeroelastic instability, causing oscillations to propagate in manned or unmanned rotor-nacelle type aircraft. Under the conditions where multi-segmented freeplay are present, complex behaviors can dominate these oscillations and can lead to disastrous consequences. This study investigates a rotor-nacelle system with multi-segmented stiffnesses with a freeplay gap to encompass the real-world influences of aircraft. The mathematical aerodynamics model considers a quasi-steady application of strip theory along each blade to outline the external forces being applied. A free-body diagram is then used to incorporate the structural stiffness and damping terms with multi-segmented freeplay considered in the structural stiffness matrix. Multiple structural responses of the defined system are investigated and characterized to determine the influence of varying symmetric and asymmetric multi-segmented stiffnesses with varying gap parameters, including a route to impact investigation. The findings are characterized using phase portraits, Poincaré maps, time histories, and basins of attraction. It is found that under these conditions, the structural influences can lead to aperiodic oscillations with the existence of grazing bifurcations. Furthermore, these results unveil that under certain conditions and high freestream velocities, the sticking phenomenon becomes apparent which is strongly dependent on the strength of the multi-segmented representation, its gap sizes, and its symmetry. Lastly, a route to impact study shows the strong coupled influence between pitch and yaw when asymmetric conditions are applied and the possible presence of grazing-sliding bifurcations. The numerical simulations performed in this study can form a basis for drone designers to create reliable rotor-nacelle systems resistant to whirl flutter caused by freeplay effects.
Full article
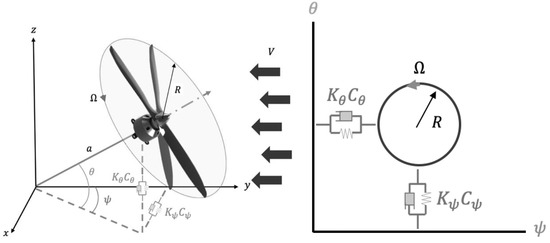
Figure 1
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}