Improving the Performance of Storage Tank Fault Diagnosis by Removing Unwanted Components and Utilizing Wavelet-Based Features




Abstract
:1. Introduction
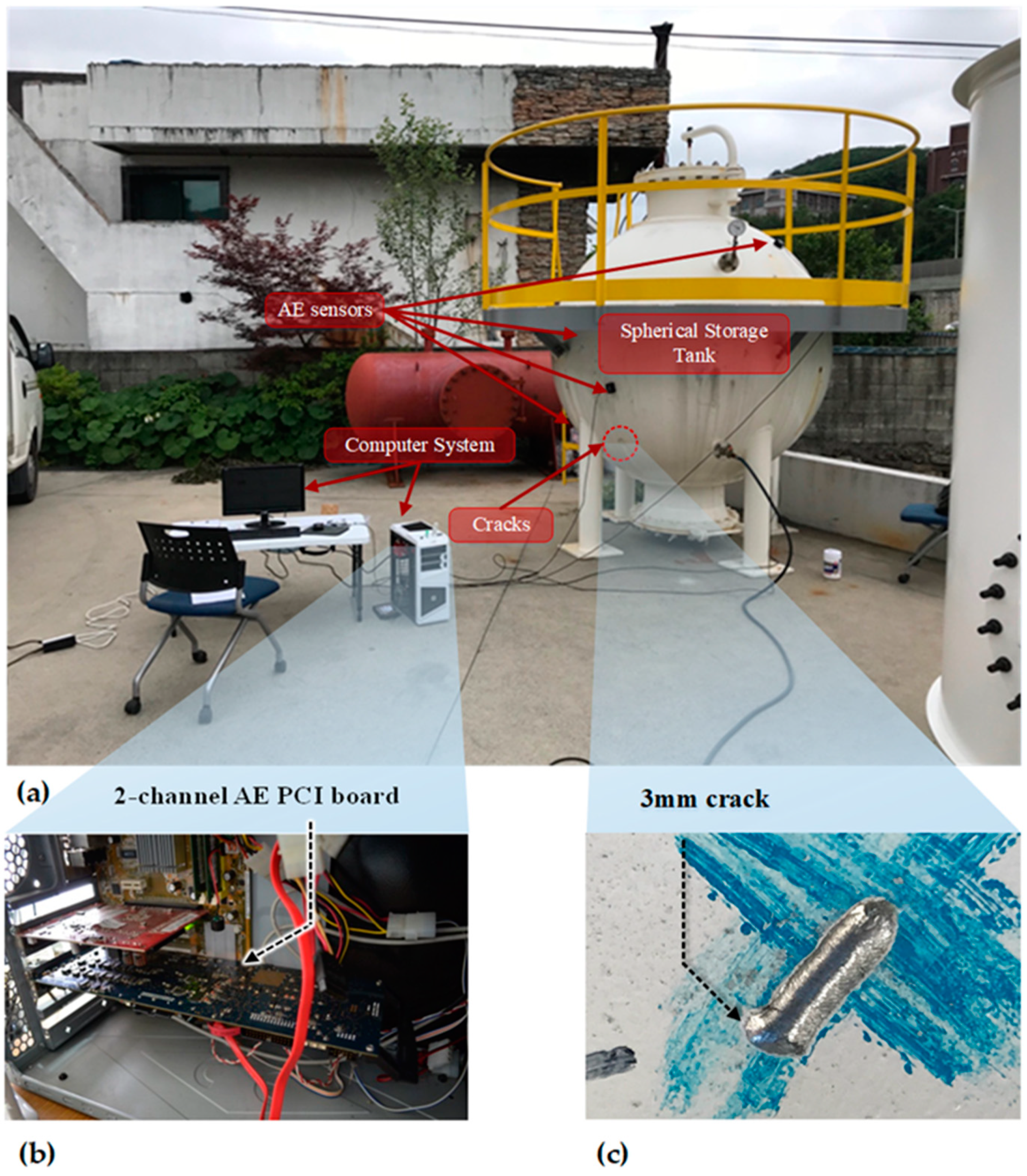
2. The Experimental Test Bed of the Storage Tank and Acoustic Emission Data Acquisition
3. The Proposed Method for Diagnosing Abnormal Tank Conditions
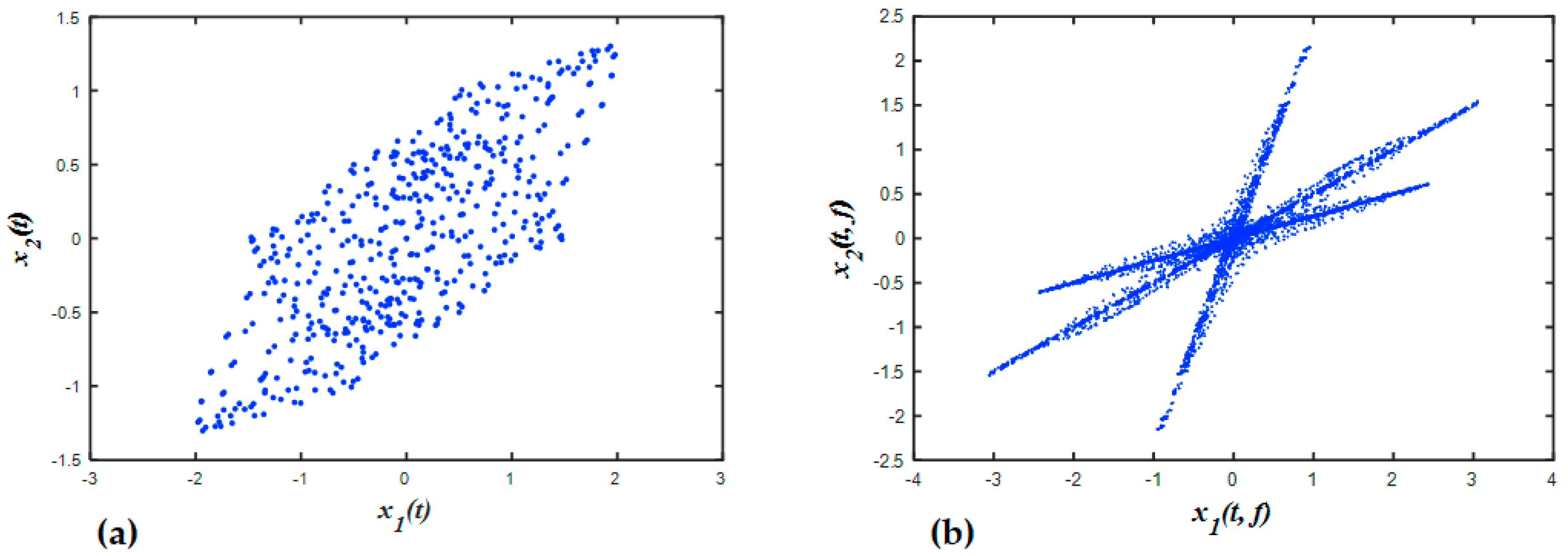
3.1. Application of Blind Source Separation to Noise-Contaminated Acoustic Emission Signals
3.1.1. Algorithm Description
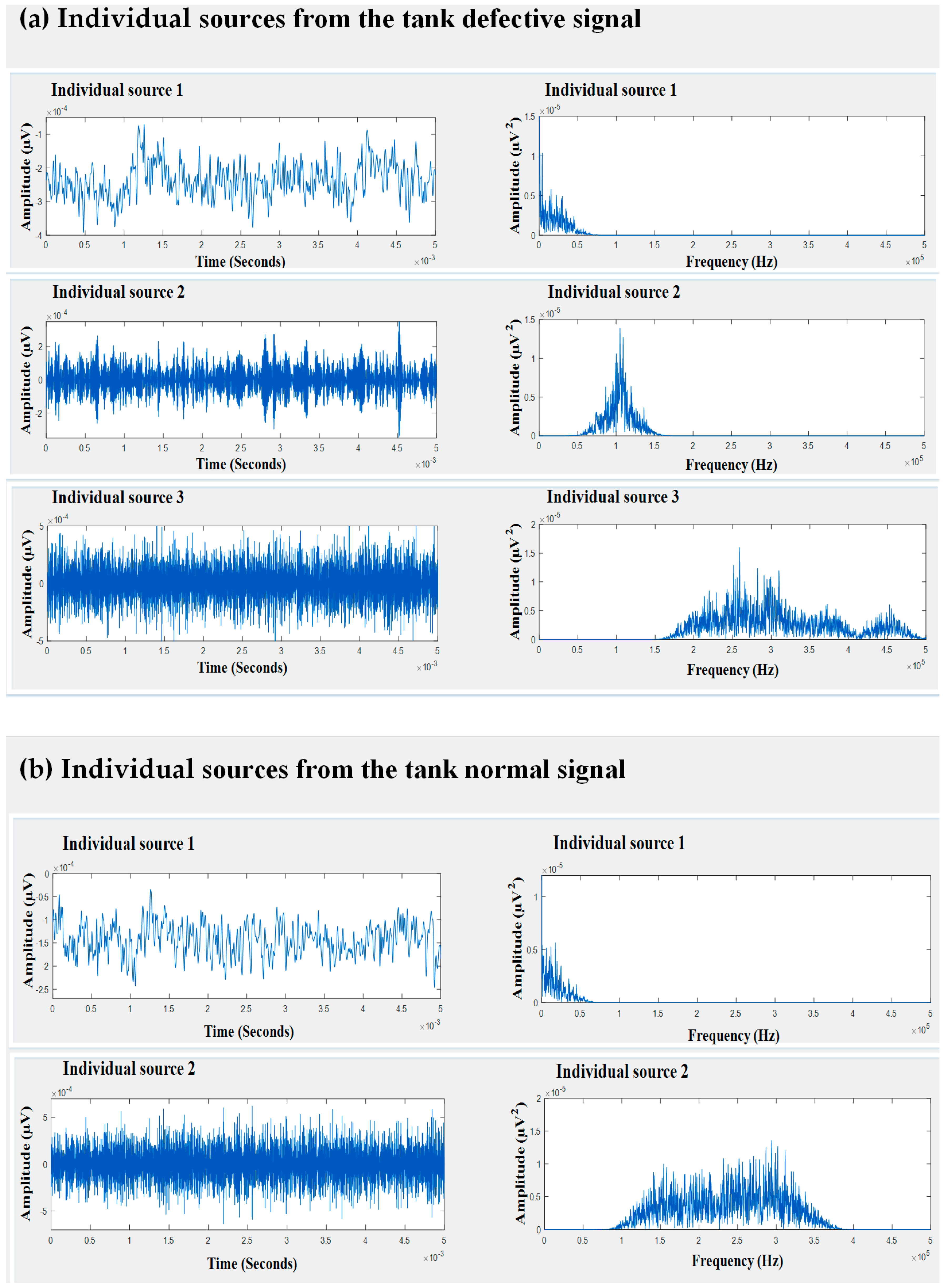
3.1.2. Application of BSS to Noisy Acoustic Emission Signals
3.2. Feature Calculation
3.3. Fault Classification
4. Experimental Result and Discussion
4.1. Configuration of Training and Testing Data
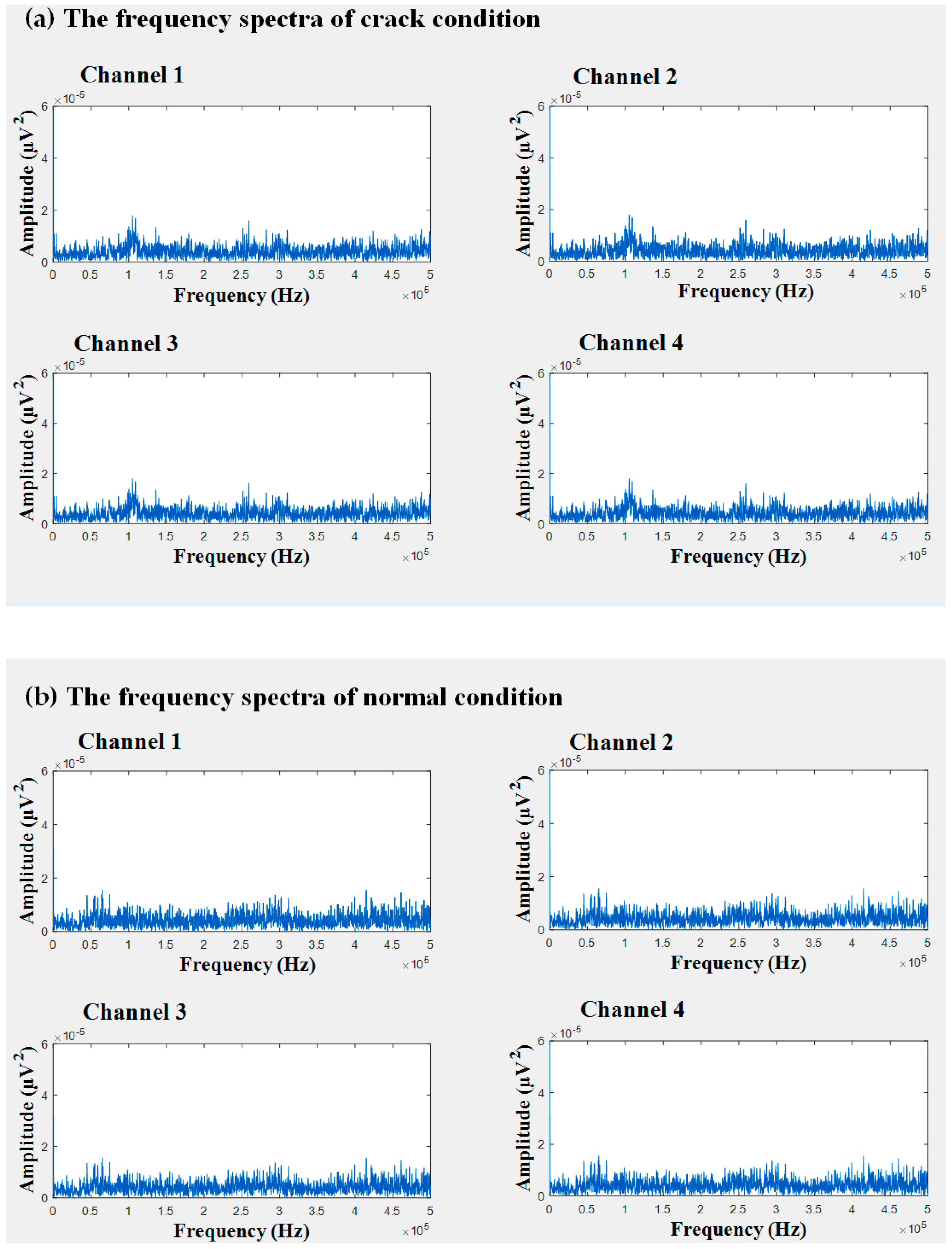
4.2. Efficacy of Removing Useless Elements
4.3. Efficacy of the Wavelet-Based Features
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Luo, T.; Wu, C.; Duan, L. Fishbone diagram and risk matrix analysis method and its application in safety assessment of natural gas spherical tank. J. Clean. Prod. 2018, 174, 296–304. [Google Scholar] [CrossRef]
- Morofuji, K.; Tsui, N.; Yamada, M.; Maie, A.; Yuyama, S.; Li, Z. Quantitative study of acoustic emission due to leaks from water tanks. System 2003, 5, 228–236. [Google Scholar]
- Wilson, S.; Zhang, H.; Burwell, K.; Samantapudi, A.; Dalemarre, L.; Jiang, C.; Rice, L.; Williams, E.; Naney, C. Leaking underground storage tanks and environmental injustice: Is there a hidden and unequal threat to public health in South Carolina? Environ. Justice 2013, 6, 175–182. [Google Scholar] [CrossRef] [PubMed]
- Lu, S.; Zhou, P.; Wang, X.; Liu, Y.; Liu, F.; Zhao, J. Condition monitoring and fault diagnosis of motor bearings using undersampled vibration signals from a wireless sensor network. J. Sound Vib. 2018, 414, 81–96. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Zhao, J. Bearing fault diagnosis of a permanent magnet synchronous motor via a fast and online order analysis method in an embedded system. Mech. Syst. Signal Process. 2018, 113, 36–49. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic-based fault diagnosis of commutator motor. Electronics 2018, 7, 299. [Google Scholar] [CrossRef]
- Caesarendra, W.; Kosasih, B.; Tieu, A.K.; Zhu, H.; Moodie, C.A.; Zhu, Q. Acoustic emission-based condition monitoring methods: Review and application for low speed slew bearing. Mech. Syst. Signal Process. 2016, 72, 134–159. [Google Scholar] [CrossRef]
- Glowacz, A. Fault Detection of Electric Impact Drills and Coffee Grinders Using Acoustic Signals. Sensors 2019, 19, 269. [Google Scholar] [CrossRef]
- Martin, G.; Dimopoulos, J.; Cacic, J. Acoustic Emission for Tank Bottom Monitoring. In Proceedings of the Advanced Materials Research, Melbourne, Australia, 5–7 December 2012; pp. 499–509. [Google Scholar]
- Cole, P.; Watson, J. Acoustic emission for corrosion detection. In Proceedings of the Advanced Materials Research, Bahrain, Manama, 27–30 November 2005; pp. 231–236. [Google Scholar]
- Kwon, J.-R.; Lyu, G.-J.; Lee, T.-H.; Kim, J.-Y. Acoustic emission testing of repaired storage tank. Int. J. Press. Vessel. Pip. 2001, 78, 373–378. [Google Scholar] [CrossRef]
- Chen, S.-W.; Chen, Y.-H. Hardware design and implementation of a wavelet de-noising procedure for medical signal preprocessing. Sensors 2015, 15, 26396–26414. [Google Scholar] [CrossRef]
- Nguyen, P.; Kang, M.; Kim, J.-M.; Ahn, B.-H.; Ha, J.-M.; Choi, B.-K. Robust condition monitoring of rolling element bearings using de-noising and envelope analysis with signal decomposition techniques. Expert Syst. Appl. 2015, 42, 9024–9032. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Lin, J.; Wang, S. Fault diagnosis of rotating machinery based on an adaptive ensemble empirical mode decomposition. Sensors 2013, 13, 16950–16964. [Google Scholar] [CrossRef]
- Tra, V.; Kim, J.; Khan, S.A.; Kim, J.-M. Incipient fault diagnosis in bearings under variable speed conditions using multiresolution analysis and a weighted committee machine. J. Acoust. Soc. Am. 2017, 142, EL35–EL41. [Google Scholar] [CrossRef] [PubMed]
- Tra, V.; Kim, J.; Khan, S.A.; Kim, J.-M. Bearing fault diagnosis under variable speed using convolutional neural networks and the stochastic diagonal levenberg-marquardt algorithm. Sensors 2017, 17, 2834. [Google Scholar] [CrossRef] [PubMed]
- Tra, V.; Khan, S.A.; Kim, J.-M. Diagnosis of bearing defects under variable speed conditions using energy distribution maps of acoustic emission spectra and convolutional neural networks. J. Acoust. Soc. Am. 2018, 144, EL322–EL327. [Google Scholar] [CrossRef]
- Xiao, Q.; Li, J.; Bai, Z.; Sun, J.; Zhou, N.; Zeng, Z. A small leak detection method based on VMD adaptive de-noising and ambiguity correlation classification intended for natural gas pipelines. Sensors 2016, 16, 2116. [Google Scholar] [CrossRef]
- Sohaib, M.; Islam, M.; Kim, J.; Jeon, D.-C.; Kim, J.-M. Leakage Detection of a Spherical Water Storage Tank in a Chemical Industry Using Acoustic Emissions. Appl. Sci. 2019, 9, 196. [Google Scholar] [CrossRef]
- Islam, M.; Sohaib, M.; Kim, J.; Kim, J.-M. Crack Classification of a Pressure Vessel Using Feature Selection and Deep Learning Methods. Sensors 2018, 18, 4379. [Google Scholar] [CrossRef]
- Dwyer, R. Detection of non-Gaussian signals by frequency domain kurtosis estimation. In Proceedings of the ICASSP′83 IEEE International Conference on Acoustics, Speech, and Signal, Boston, MA, USA, 14–16 April 1983; pp. 607–610. [Google Scholar]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zi, Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1738–1749. [Google Scholar] [CrossRef]
- Wang, D.; Peter, W.T.; Tsui, K.L. An enhanced Kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2013, 35, 176–199. [Google Scholar] [CrossRef]
- Barszcz, T.; JabŁoński, A. A novel method for the optimal band selection for vibration signal demodulation and comparison with the Kurtogram. Mech. Syst. Signal Process. 2011, 25, 431–451. [Google Scholar] [CrossRef]
- Peter, W.T.; Wang, D. The design of a new sparsogram for fast bearing fault diagnosis: Part 1 of the two related manuscripts that have a joint title as “Two automatic vibration-based fault diagnostic methods using the novel sparsity measurement—Parts 1 and 2”. Mech. Syst. Signal Process. 2013, 40, 499–519. [Google Scholar]
- Antoni, J. The infogram: Entropic evidence of the signature of repetitive transients. Mech. Syst. Signal Process. 2016, 74, 73–94. [Google Scholar] [CrossRef]
- Wang, D. An extension of the infograms to novel Bayesian inference for bearing fault feature identification. Mech. Syst. Signal Process. 2016, 80, 19–30. [Google Scholar] [CrossRef]
- Wang, D.; Tsui, K.-L. Dynamic Bayesian wavelet transform: New methodology for extraction of repetitive transients. Mech. Syst. Signal Process. 2017, 88, 137–144. [Google Scholar] [CrossRef]
- Zarei, J.; Poshtan, J. Bearing fault detection using wavelet packet transform of induction motor stator current. Tribol. Int. 2007, 40, 763–769. [Google Scholar] [CrossRef]
- Boskoski, P.; Juricic, D. Fault detection of mechanical drives under variable operating conditions based on wavelet packet Renyi entropy signatures. Mech. Syst. Signal Process. 2012, 31, 369–381. [Google Scholar] [CrossRef]
- Li, F.; Meng, G.; Ye, L.; Chen, P. Wavelet transform-based higher-order statistics for fault diagnosis in rolling element bearings. J. Vib. Control 2008, 14, 1691–1709. [Google Scholar]
- Feng, Y.; Schlindwein, F.S. Normalized wavelet packets quantifiers for condition monitoring. Mech. Syst. Signal Process. 2009, 23, 712–723. [Google Scholar] [CrossRef]
- Barbosa, F.R.; Almeida, O.M.; Braga, A.P.; Amora, M.A.; Cartaxo, S.J. Application of an artificial neural network in the use of physicochemical properties as a low cost proxy of power transformers DGA data. IEEE Trans. Dielectr. Electr. Insul. 2012, 19, 239–246. [Google Scholar] [CrossRef]
- Ghoneim, S.S.; Taha, I.B. Artificial neural networks for power transformers fault diagnosis based on IEC code using dissolved gas analysis. Int. J. Control Autom. Syst. 2015, 4, 18–21. [Google Scholar]
- Khan, S.A.; Equbal, M.D.; Islam, T. A comprehensive comparative study of DGA based transformer fault diagnosis using fuzzy logic and ANFIS models. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 590–596. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, G.; Zhao, J.; He, Z.; Wang, J.; Pérez-Jiménez, M.J. Fault diagnosis of electric power systems based on fuzzy reasoning spiking neural P systems. IEEE Trans. Power Syst. 2015, 30, 1182–1194. [Google Scholar] [CrossRef]
- Peimankar, A.; Weddell, S.J.; Jalal, T.; Lapthorn, A.C. Evolutionary multi-objective fault diagnosis of power transformers. Swarm Evol. Comput. 2017, 36, 62–75. [Google Scholar] [CrossRef]
- Dai, J.; Song, H.; Sheng, G.; Jiang, X. Dissolved gas analysis of insulating oil for power transformer fault diagnosis with deep belief network. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 2828–2835. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, P.; Ni, T.; Cheng, P.; Lei, S. Wind power prediction based on LS-SVM model with error correction. Adv. Electr. Comput. Eng. 2017, 17, 3–9. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, P.; Zhang, C.; Lei, S. Wind energy prediction with LS-SVM based on Lorenz perturbation. J. Eng. 2017, 2017, 1724–1727. [Google Scholar] [CrossRef]
- Wilk-Kolodziejczyk, D.; Regulski, K.; Gumienny, G. Comparative analysis of the properties of the nodular cast iron with carbides and the austempered ductile iron with use of the machine learning and the support vector machine. Int. J. Adv. Manuf. Technol. 2016, 87, 1077–1093. [Google Scholar] [CrossRef]
- Bofill, P.; Zibulevsky, M. Underdetermined blind source separation using sparse representations. Signal Process. 2001, 81, 2353–2362. [Google Scholar] [CrossRef]
- Li, Y.; Amari, S.-I.; Cichocki, A.; Ho, D.W.; Xie, S. Underdetermined blind source separation based on sparse representation. IEEE Trans. Signal Process. 2006, 54, 423–437. [Google Scholar]
- Le, T.-P.; Paultre, P. Modal identification based on the time–frequency domain decomposition of unknown-input dynamic tests. Int. J. Mech. Sci. 2013, 71, 41–50. [Google Scholar] [CrossRef]
- Sadhu, A.; Hazra, B.; Narasimhan, S.; Pandey, M. Decentralized modal identification using sparse blind source separation. Smart Mater. Struct. 2011, 20, 125009. [Google Scholar] [CrossRef]
- Hazra, B.; Sadhu, A.; Roffel, A.J.; Narasimhan, S. Hybrid time-frequency blind source separation towards ambient system identification of structures. Comput.-Aided Civ. Infrastruct. Eng. 2012, 27, 314–332. [Google Scholar] [CrossRef]
- Qin, S.; Guo, J.; Zhu, C. Sparse component analysis using time-frequency representations for operational modal analysis. Sensors 2015, 15, 6497–6519. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Nagarajaiah, S. Output-only modal identification with limited sensors using sparse component analysis. J. Sound Vib. 2013, 332, 4741–4765. [Google Scholar] [CrossRef]
- Yu, K.; Yang, K.; Bai, Y. Estimation of modal parameters using the sparse component analysis based underdetermined blind source separation. Mech. Syst. Signal Process. 2014, 45, 302–316. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AE sensor (PAC WSα) |
|
| Two-channel AE PCI board |
|
| fs = 1 MHz | No. Samples 1 | Crack Size | |||
|---|---|---|---|---|---|
| Length (mm) | Width (mm) | Depth (mm) | |||
| Dataset 1 | Training set | 1080 | 3 | 0.5 | 0.4 |
| Testing set | 0.5 | 0.4 | |||
| Dataset 2 | Training set | 1080 | 6 | 0.7 | 0.5 |
| Testing set | 0.7 | 0.5 | |||
| Datasets | Methodologies | Average Accuracy (%) |
|---|---|---|
| Dataset 1 | [*] | 90.15 |
| Proposed | 97.25 | |
| Dataset 2 | [*] | 90.38 |
| Proposed | 98.47 |
| Datasets | Methodologies | Accuracy (%) |
|---|---|---|
| Dataset 1 | [**] | 92.35 |
| Proposed | 97.25 | |
| Dataset 2 | [**] | 93.72 |
| Proposed | 98.48 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tra, V.; Duong, B.-P.; Kim, J.-Y.; Sohaib, M.; Kim, J.-M. Improving the Performance of Storage Tank Fault Diagnosis by Removing Unwanted Components and Utilizing Wavelet-Based Features. Entropy 2019, 21, 145. https://0-doi-org.brum.beds.ac.uk/10.3390/e21020145
Tra V, Duong B-P, Kim J-Y, Sohaib M, Kim J-M. Improving the Performance of Storage Tank Fault Diagnosis by Removing Unwanted Components and Utilizing Wavelet-Based Features. Entropy. 2019; 21(2):145. https://0-doi-org.brum.beds.ac.uk/10.3390/e21020145
Chicago/Turabian StyleTra, Viet, Bach-Phi Duong, Jae-Young Kim, Muhammad Sohaib, and Jong-Myon Kim. 2019. "Improving the Performance of Storage Tank Fault Diagnosis by Removing Unwanted Components and Utilizing Wavelet-Based Features" Entropy 21, no. 2: 145. https://0-doi-org.brum.beds.ac.uk/10.3390/e21020145