Image-Based Methods to Investigate Synchronization between Time Series Relevant for Plasma Fusion Diagnostics

 ,
,  and
and
Abstract
:1. Introduction
2. Image Representation of Time Series
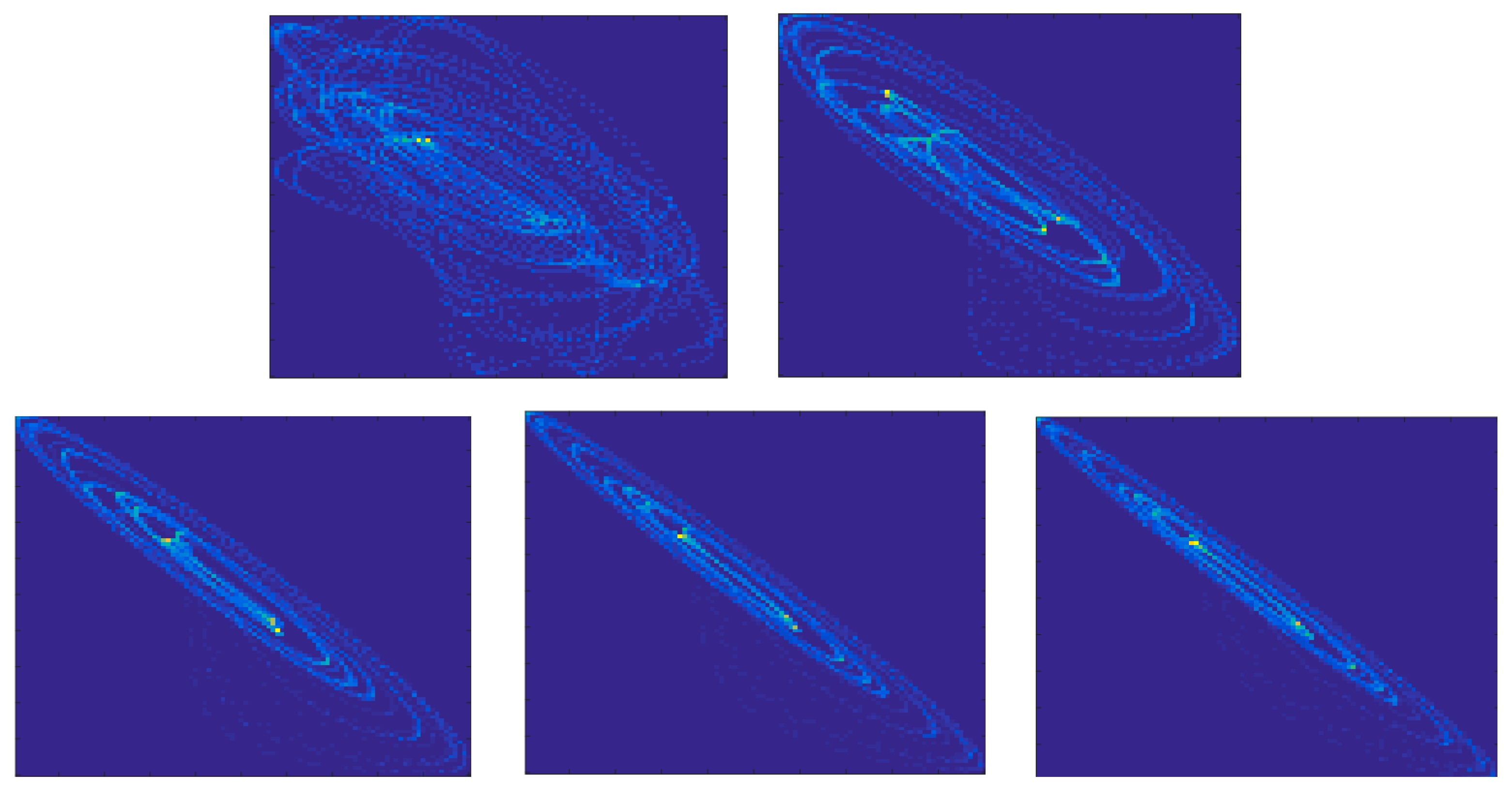
2.1. Gramian Angular Field (GAM)
- -
- is the luminance comparison term, , are the luminances of images and . This term is equal to one for identical luminaces.
- -
- c is the contrast comparison term, the contrast is measured by the standard deviation , of images and .
- -
- s, is the structure comparison term, measured by the correlation coefficient between the two images and , is the covariance between and .
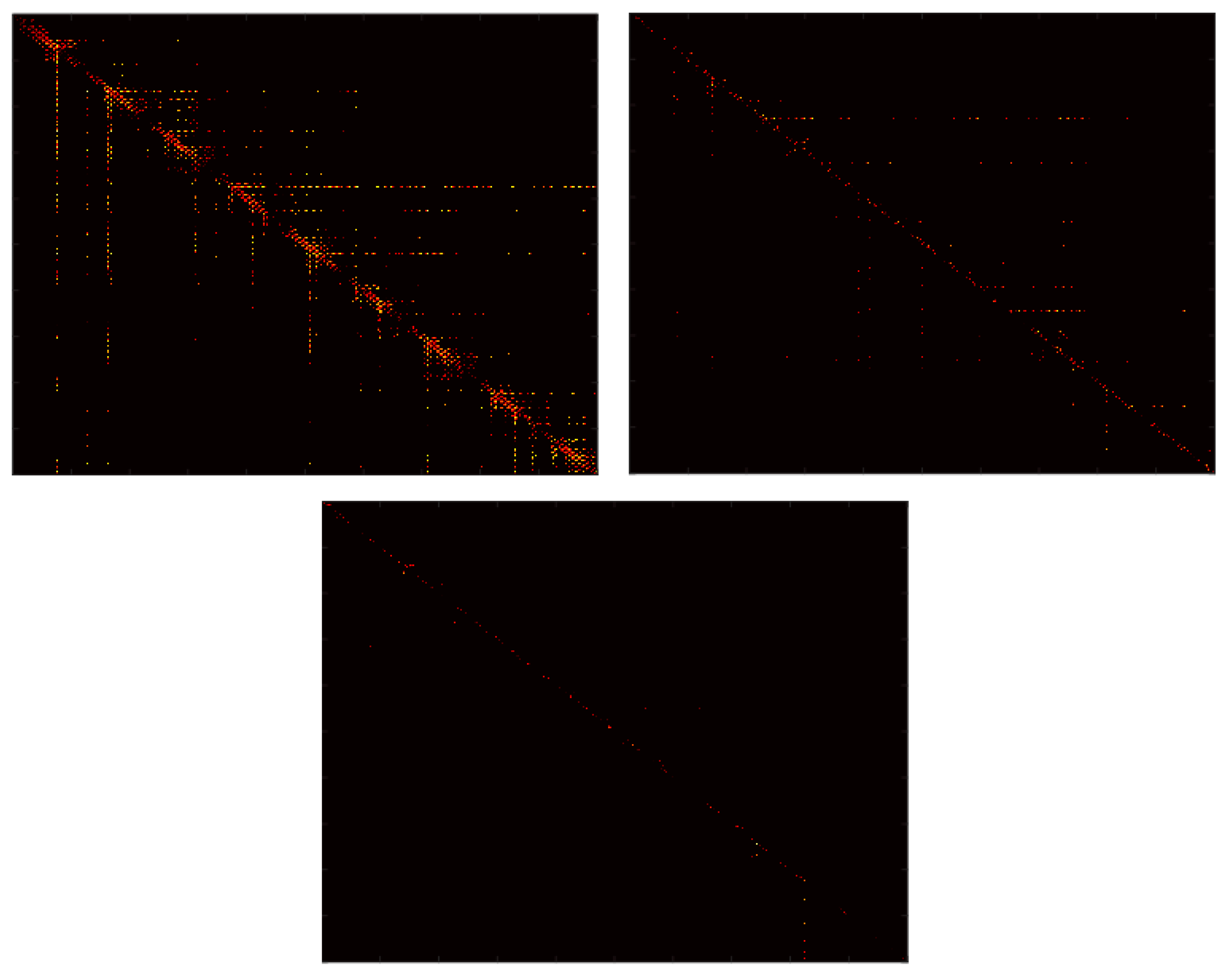
2.2. Markov Transition Field (MTF)
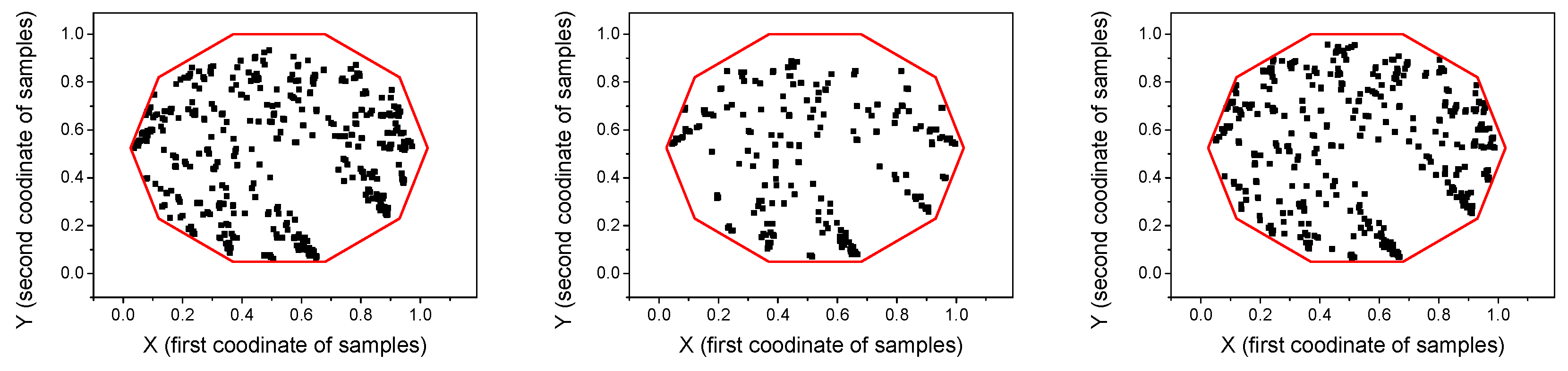
2.3. Chaos Game Representation (CGR)
- -
- N is the number of samples .
- -
- the maximum number of nearest neighbors.
- -
- is the digamma function: (Euler constant) is the volume of the unit ball in and is the -th nearest neighbor distance from to some other .
2.4. Complex Networks (CN)
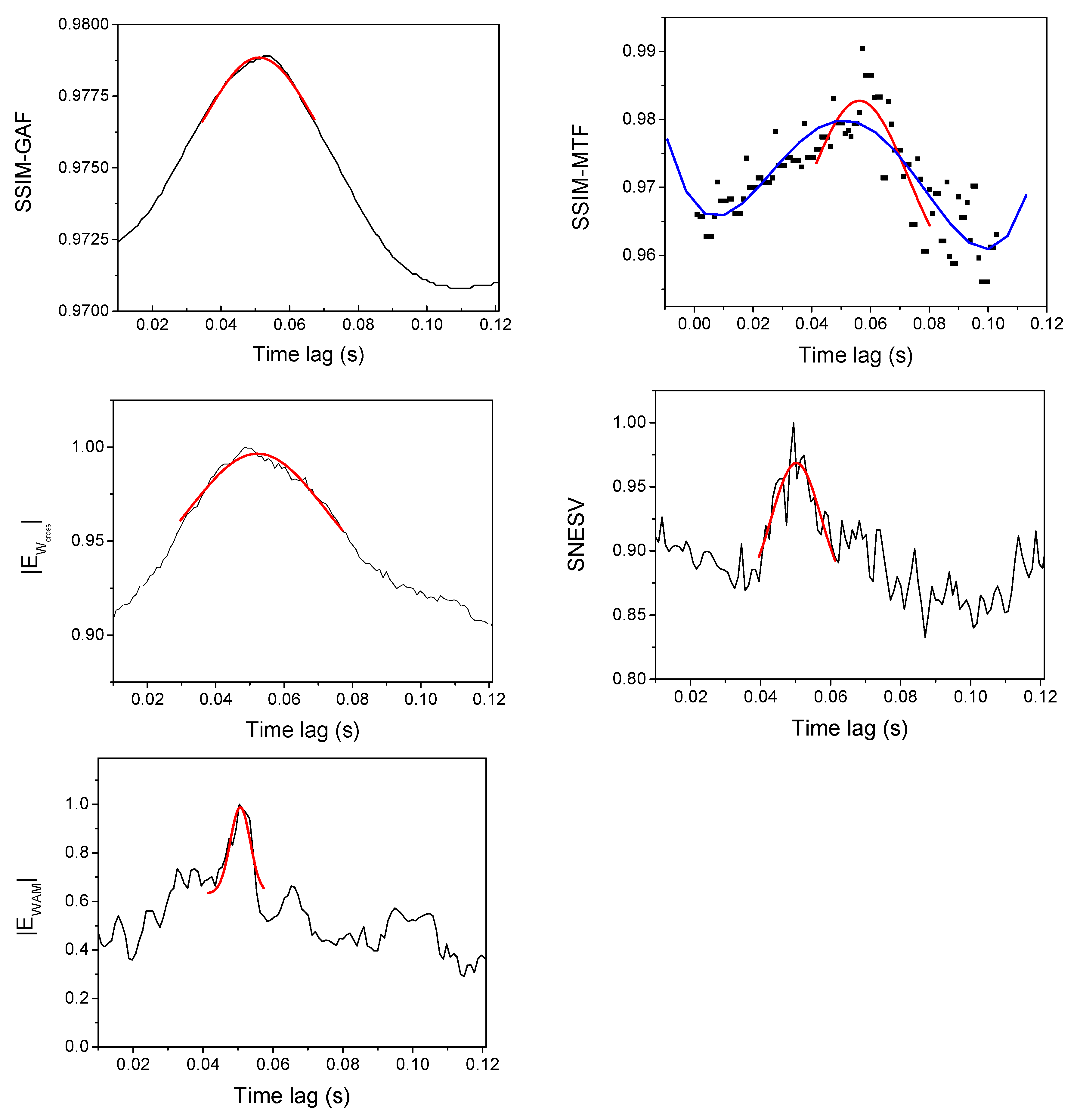
3. Results and Discussion
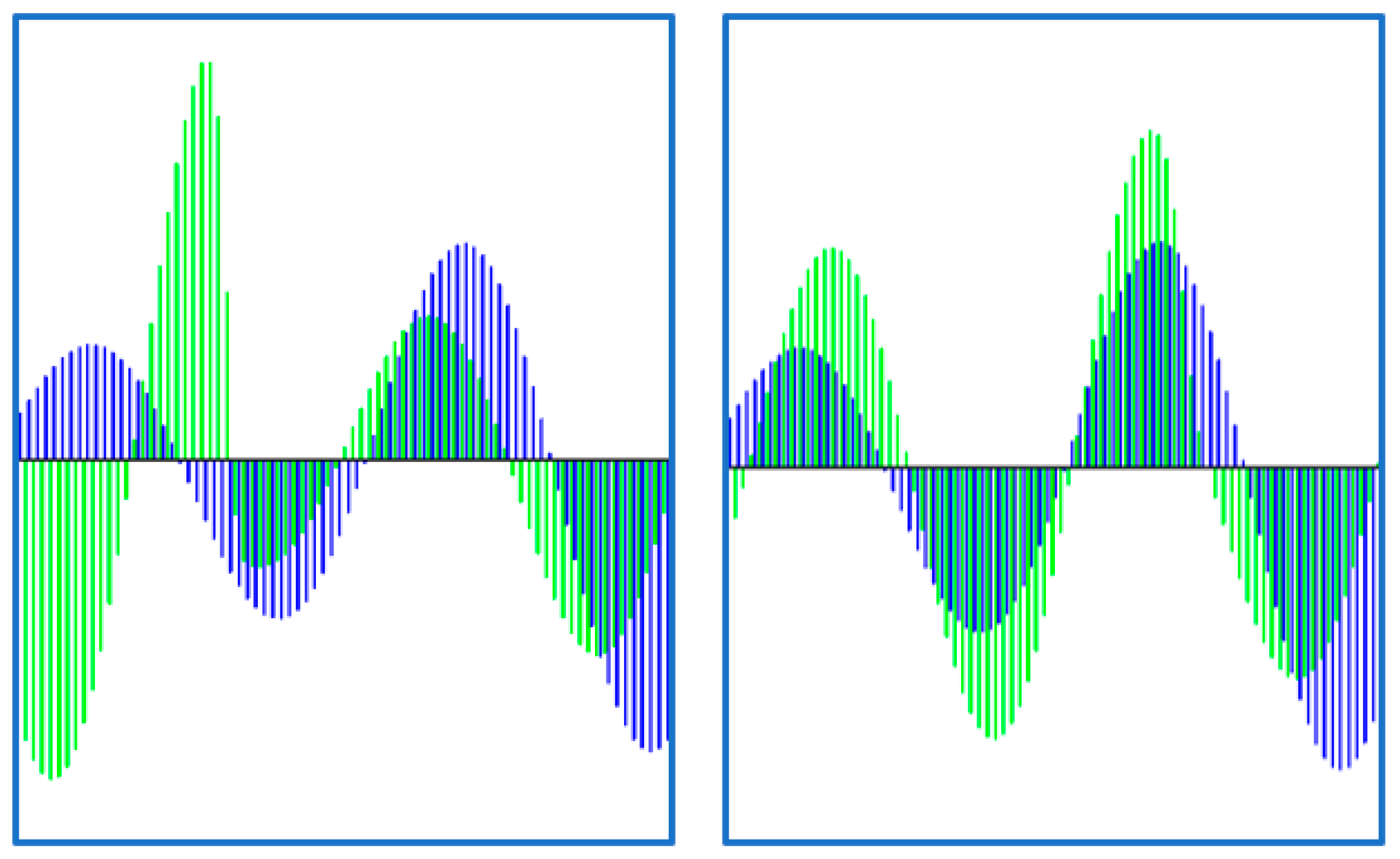
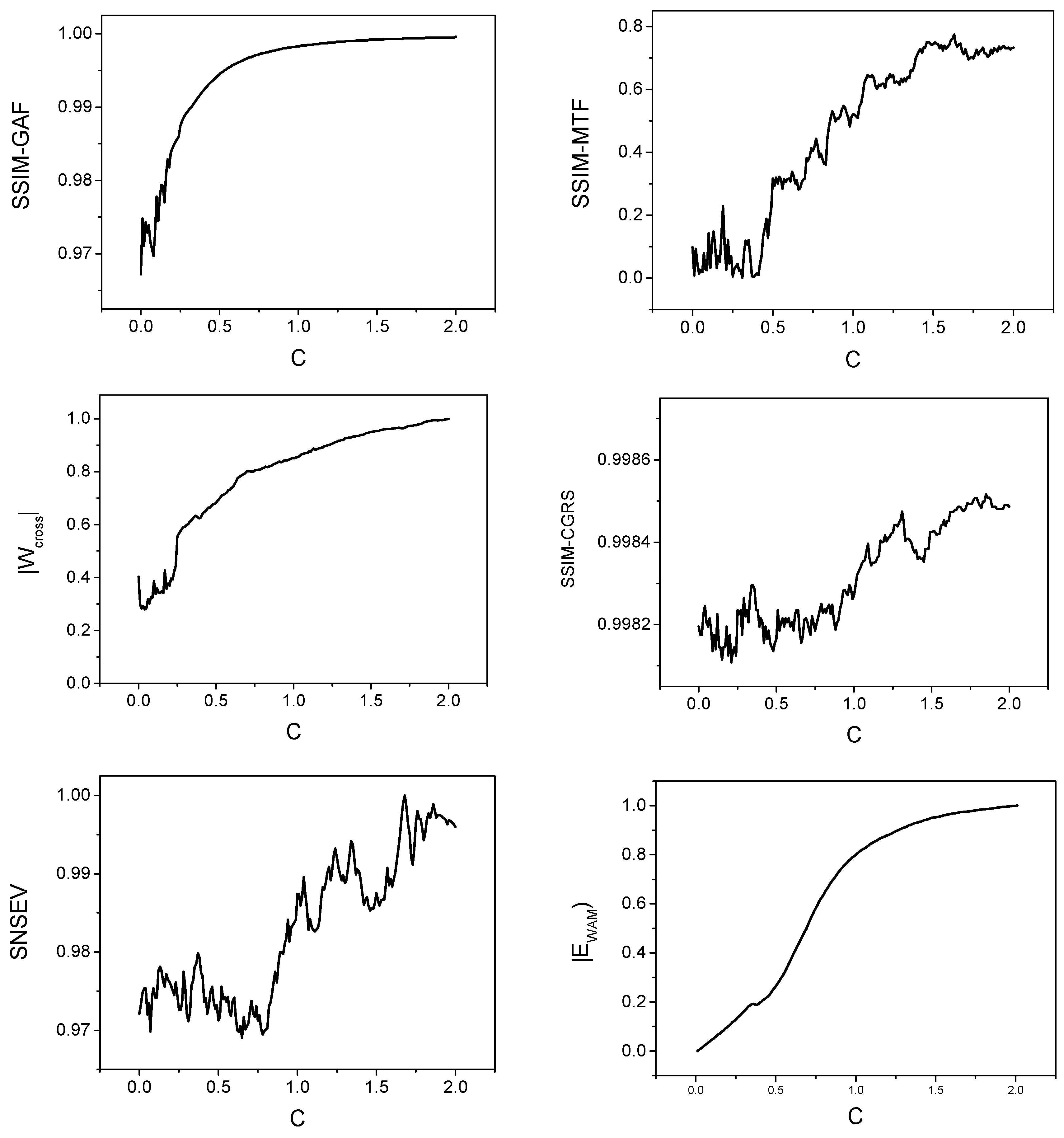
3.1. Numerical Tests
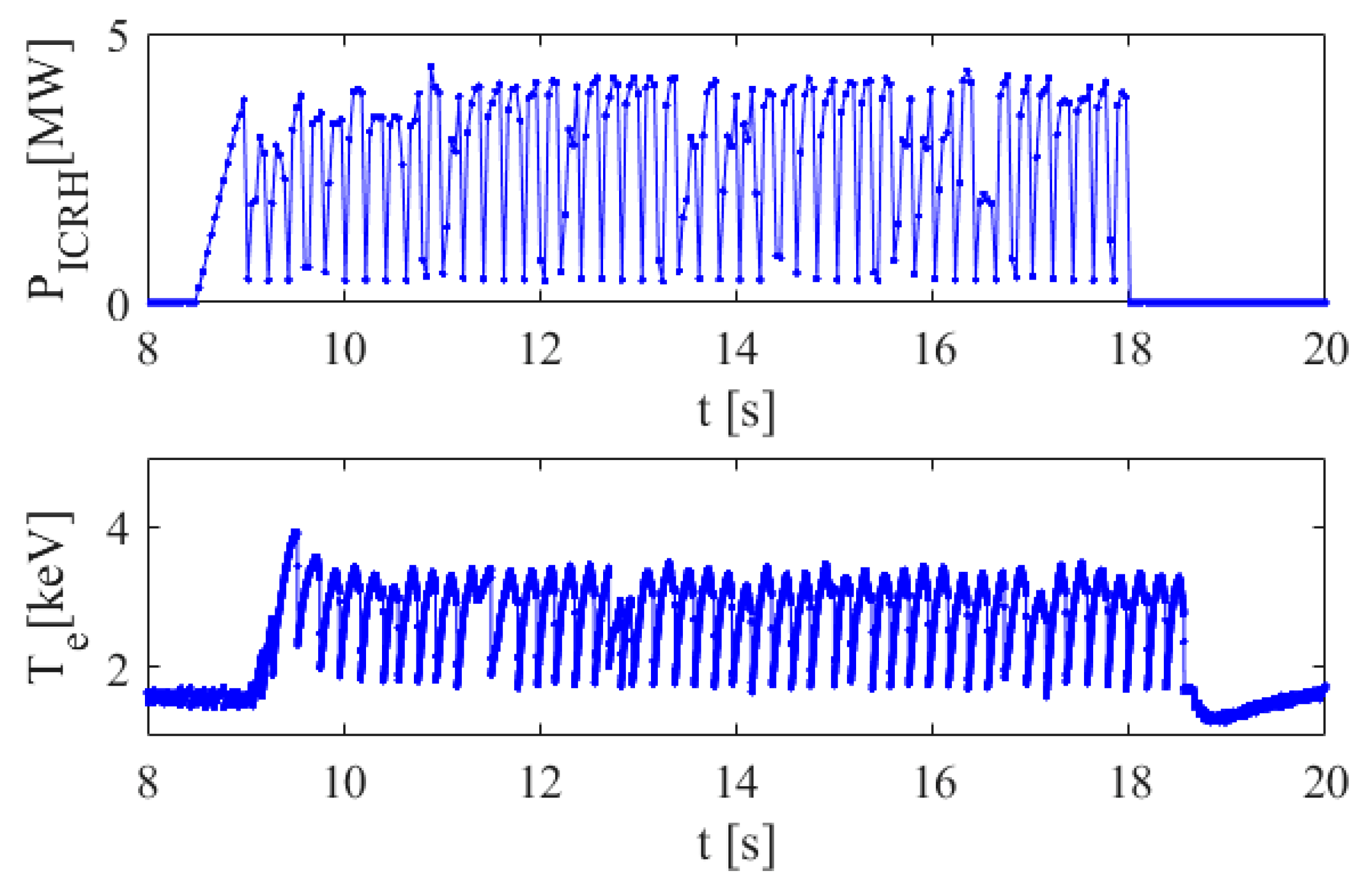
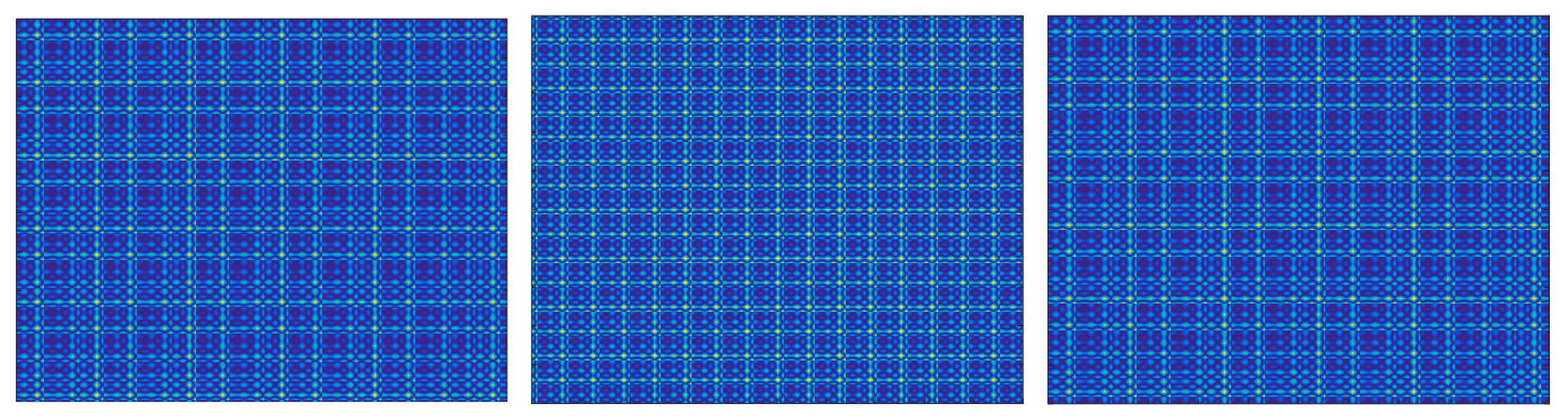
3.2. Experiments
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wesson, J. Tokamaks, 3rd ed.; Clarendon Press Oxford: Oxford, UK, 2004. [Google Scholar]
- Lang, P.T.; Alonso, A.; Alper, B.; Belonohy, E.; Boboc, A.; Devaux, S.; Eich, T.; Frigione, D.; Gál, K.; Garzotti, L.; et al. ELM pacing investigations at JET with the new pellet launcher. Nucl. Fusion 2011, 51, 033010. [Google Scholar] [CrossRef] [Green Version]
- Lerche, E.; Lennholm, M.; Carvalho, I.S.; Dumortier, P.; Durodie, F.; Van Eester, D.; Graves Jacquet, J.P.; Murari, A. Sawtooth pacing with on-axis ICRH modulation in JET-ILW. Nucl. Fusion 2017, 57, 036027. [Google Scholar] [CrossRef] [Green Version]
- Coufal, D.; Jakubík, J.; Jajcay, N.; Hlinka, J.; Krakovská, A.; Paluš, M. Detection of coupling delay: A problem not yet solved. Chaos 2017, 27, 083109. [Google Scholar] [CrossRef]
- Krakovská, A.; Jakubík, J.; Chvosteková, M.; Coufal, D.; Jajcay, N.; Paluš, M. Comparison of six methods for the detection of causality in a bivariate time series. Phys. Rev. E 2018, 97, 042207. [Google Scholar] [CrossRef]
- Murari, A.; Craciunescu, T.; Peluso, E.; Gelfusa, M.; Lungaroni, M.; Garzotti, L.; Frigione, D.; Gaudio, P. How to assess the efficiency of synchronization experiments in tokamaks. Nucl. Fusion 2016, 56, 076008. [Google Scholar] [CrossRef]
- Murari, A.; Craciunescu, T.; Peluso, E.; Lerche, E.; Gelfusa, M. On efficiency and interpretation of sawteeth pacing with on-axis ICRH modulation in JET. Nucl. Fusion 2017, 57, 126057. [Google Scholar] [CrossRef] [Green Version]
- Murari, A.; Craciunescu, T.; Peluso, E.; Gelfusa, M. Detection of Causal Relations in Time Series Affected by Noise in Tokamaks Using Geodesic Distance on Gaussian Manifolds. Entropy 2017, 19, 569. [Google Scholar] [CrossRef] [Green Version]
- Shneiderman, B. Inventing discovery tools: Combining information visualization with data mining. Inf. Vis. 2002, 1, 5–12. [Google Scholar] [CrossRef]
- Wattenberg, M. Arc Diagrams: Visualizing Structure in Strings. In Proceedings of the IEEE Symposium on Information Visualization, Boston, MA, USA, 28–29 October 2002; pp. 110–116. [Google Scholar]
- Lin, J.; Keogh, E.; Lonardi, S.; Lankford, J.P.; Nystrom, D.M. Visually Mining and Monitoring Massive Time Series. In Proceedings of the tenth ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, Seattle, WA, USA, 22–25 August 2004; pp. 460–469. [Google Scholar] [CrossRef] [Green Version]
- Weber, M.; Alexa, M.; Mueller, W. Visualizing Time-Series on Spirals. In Proceedings of the IEEE Symposium on Information Visualization INFOVIS 2001, San Diego, CA, USA, 22–23 October 2001. [Google Scholar] [CrossRef]
- Wang, Z.; Oates, T. Encoding Time Series as Images for Visual Inspection and Classification Using Tiled Convolutional Neural Networks. In Trajectory-Based Behavior Analytics; Technical Report/Association for the Advancement of Artificial Intelligence WS; AAAI Press: Palo Alto, CA, USA, 2015; pp. 40–46. [Google Scholar]
- Kumar, N.; Lolla, V.N.; Keogh, E.J.; Lonardi, S.; Ratamanahatana, C.A. Time-series Bitmaps: A Practical Visualization Tool for Working with Large Time Series. In Proceedings of the 2005 SIAM International Conference on Data Mining, SDM 2005, Newport Beach, CA, USA, 21–23 April 2005; pp. 531–535. [Google Scholar] [CrossRef] [Green Version]
- Craciunescu, T.; Murari, A.; Gelfusa, M. Improving Entropy Estimates of Complex Network Topology for the Characterization of Coupling in Dynamical Systems. Entropy 2018, 20, 891. [Google Scholar] [CrossRef] [Green Version]
- Hatami, N.; Gavet, Y.; Debayle, J. Bag of recurrence patterns representation for time-series classification. Pattern Anal. Applic. 2019, 22, 877–887. [Google Scholar] [CrossRef] [Green Version]
- Marwan, N.; Romano, M.C.; Thiel, M.; Kurths, J. Recurrence plots for the analysis of complex systems. Phys. Rep. 2007, 438, 237–329. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, R.; Zhou, Z. Understanding bag-of-words model: A statistical framework. Int. J. Mach. Learn. Cyber. 2010, 1, 43–52. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, X. Motif Difference Field: A Simple and Effective Image Representation of Time Series for Classification. arXiv 2020, arXiv:2001.07582. [Google Scholar]
- Lowe, D. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE computer society conference on computer vision and pattern recognition (CVPR), San Diego, CA, USA, 20–26 June 2005. [Google Scholar]
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. TPAMI 2002, 7, 971–987. [Google Scholar] [CrossRef]
- Jastrzebska, A. Time series classification through visual pattern recognition. J. King Saud Univ. Comput. Inf. Sci. 2019. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, H.R. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Campanharo, A.S.; Sirer, M.I.; Malmgren, R.D.; Ramos, F.M.; Amaral, L.A.N. Duality between time series and networks. PLoS ONE 2011, 6, e23378. [Google Scholar] [CrossRef] [Green Version]
- Jeffrey, H.J. Chaos game representation of gene structure. Nucleic Acids Res. 1990, 18, 2163–2170. [Google Scholar] [CrossRef] [Green Version]
- Lin, J.; Keogh, E.; Lonardi, S.; Chiu, B. A Symbolic Representation of Time Series, with Implications for Streaming Algorithms. In Proceedings of the eighth ACM SIGMOD Workshop on Research Issues in Data Mining and Knowledge Discovery, San Diego, CA, USA, 14–19 June 2003; ISBN 978-1-4503-7422-4. [Google Scholar]
- Escolano, F.; Hancock, E.; Lozano, M. Graph matching through entropic manifold alignment. In Proceedings of the Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 20–25 June 2011. [Google Scholar] [CrossRef] [Green Version]
- Kozachenko, L.F.; Leonenko, N.N. Sample estimate of the entropy of a random vector. Probl. Peredachi Inf. 1987, 23, 9–16. [Google Scholar]
- Kraskov, A.; Stögbauer, H.; Grassberger, H. Erratum: Estimating mutual information [Phys. Rev. E 69, 066138 (2004)]. Phys. Rev. E 2011, E 83, 019903. [Google Scholar] [CrossRef] [Green Version]
- Lombardi, D.; Pant, S. Nonparametric k-nearest-neighbor entropy estimator. Phys. Rev. 2016, E 93, 013310. [Google Scholar]
- Gao, W.; Oh, S.; Viswanath, P. Demystifying Fixed k -Nearest Neighbor Information Estimators. IEEE Trans. Inf. Theory 2008, 64, 5629–5661. [Google Scholar] [CrossRef] [Green Version]
- Paninski, L.; Yajima, M. Undersmoothed kernel entropy estimators. IEEE Trans. Inf. Theory 2008, 54, 4384–4388. [Google Scholar] [CrossRef]
- Ver Steeg, G.; Galstyan, A. Discovering structure in high-dimensional data through correlation explanation. In Advances in Neural Information Processing Systems, Proceedings of the Annual Conference on Neural Information Processing Systems 2014, Montreal, QC, Canada, 8–13 December 2014; Massachusetts Institute of Technology Press: Cambridge, MA, USA, 2014; pp. 577–585. [Google Scholar]
- Leonenko, N.; Pronzato, L.; Savani, V. A class of renyi information estimators for multidimensional densities. Ann. Stat. 2008, 36, 2153–2182. [Google Scholar] [CrossRef]
- Mehraban, S.; Shirazi, A.H.; Zamani, M.; Jafari, G.R. Coupling between time series: A network view. EPL 2015, 103, 50011. [Google Scholar] [CrossRef] [Green Version]
- Lacasa, L.; Luque, B.; Ballesteros, F.; Luque, J.; Nun, J.C. From time series to complex networks: The visibility graph. PNAS 2008, 105–113, 4972–4975. [Google Scholar] [CrossRef] [Green Version]
- Ding, H.; Trajcevski, G.; Scheuermann, P.; Wang, X.; Keogh, E. Querying and Mining of Time Series Data: Experimental Comparison of Representations and Distance Measures. In Proceedings of the VLDB Endowment, Auckland, New Zealand, 24–30 August 2008; Volume 1, pp. 1542–1552. [Google Scholar]
- Iglesias, F.; Kastner, W. Analysis of Similarity Measures in Times Series Clustering for the Discovery of Building Energy Patterns. Energies 2013, 6, 579–597. [Google Scholar] [CrossRef] [Green Version]
- Craciunescu, T.; Murari, A.; Gelfusa, M. Causality Detection Methods Applied to the Investigation of Malaria Epidemics. Entropy 2019, 21, 784. [Google Scholar] [CrossRef] [Green Version]
- Rössler, O.E. An Equation for Continuous Chaos. Phys. Lett. 1976, 57A-5, 397–398. [Google Scholar] [CrossRef]
- Mormann, F.; Lehnertz, K.; David, P.; Elger, C.E. Mean phase coherence as a measure for phase synchronization and its application to the EEG of epilepsy patients. Physica D 2000, 144, 358–369. [Google Scholar] [CrossRef]
- Kreuz, T.; Mormann, F.; Andrzejak, R.G.; Kraskov, A.; Lehnertz, K.; Grassberger, P. Measuring synchronization in coupled model systems: A comparison of different approaches. Physica D 2007, 225, 29–42. [Google Scholar] [CrossRef]
- Janjarasjittab, S.; Loparo, K.A. An approach for characterizing coupling in dynamical systems. Physica D 2008, 237, 2482–2486. [Google Scholar] [CrossRef]
- Pano-Azucena, A.D.; Tlelo-Cuautle, E.; Tan, S.X.-D.; Ovilla-Martinez, B.; De la Fraga, L.G. FPGA-Based Implementation of a Multilayer Perceptron Suitable for Chaotic Time Series Prediction. Technologies 2018, 6, 90. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulse Number | Regime | GAF (ms) | MTF (ms) | CMM (ms) | CGRS (ms) | CN (ms) | Time of Maximum Causal Influence Reported in [7] (ms) | Slowing-Down Time of the Ions (ms) |
|---|---|---|---|---|---|---|---|---|
| 89822 | L | 52 | 57 | 52 | 48 | 50 | [52, 54] | 50 (+/−10) |
| 89826 | L | 51 | 50/56 | 52 | 50 | 51 | [52, 54] | 50 (+/−10) |
| 90005 | H | 74 | 96 | 73 | 64 | 70 | [68, 72] | 80 (+/−20) |
| 90006 | H | 85 | 102/108 | 87 | 81 | 89 | [85, 95] | 80 (+/−20) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Craciunescu, T.; Murari, A.; Lerche, E.; Gelfusa, M.; JET Contributors. Image-Based Methods to Investigate Synchronization between Time Series Relevant for Plasma Fusion Diagnostics. Entropy 2020, 22, 775. https://0-doi-org.brum.beds.ac.uk/10.3390/e22070775
Craciunescu T, Murari A, Lerche E, Gelfusa M, JET Contributors. Image-Based Methods to Investigate Synchronization between Time Series Relevant for Plasma Fusion Diagnostics. Entropy. 2020; 22(7):775. https://0-doi-org.brum.beds.ac.uk/10.3390/e22070775
Chicago/Turabian StyleCraciunescu, Teddy, Andrea Murari, Ernesto Lerche, Michela Gelfusa, and JET Contributors. 2020. "Image-Based Methods to Investigate Synchronization between Time Series Relevant for Plasma Fusion Diagnostics" Entropy 22, no. 7: 775. https://0-doi-org.brum.beds.ac.uk/10.3390/e22070775