
Energy-Efficient Trajectory Optimization for UAV-Based Hybrid FSO/RF Communications with Buffer Constraints

 and
and
Abstract
:1. Introduction
- Different from [9,10,11,12] focusing on the UAV based RF scenarios, we consider a UAV based hybrid FSO/RF system with a buffer, which is a promising solution to the emerging wireless backbone network. Unlike [5,6,7,8], we focus on analyzing the energy efficiency of the system. Initially, we obtain an energy consumption model, which includes communication-related energy consumption and propulsion energy consumption. Then, the throughput is derived as the total data rate of reaching the destination. Finally, the energy efficiency is derived as the throughput normalized by the energy consumption.
- Based on the derived energy efficiency expression, we optimize the UAV’s trajectory by maximizing energy efficiency under the buffer constraint, velocity constraint, acceleration constraint, start–end position constraint, and start–end velocity constraint. The considered optimization problem is nonconvex. By using the sequential convex optimization and first-order Taylor approximation, we transform the nonconvex problem into a convex problem and propose an iterative algorithm to solve the problem. To the best of our knowledge, there is no other literature to tackle the energy-efficient trajectory optimization of such a hybrid system.
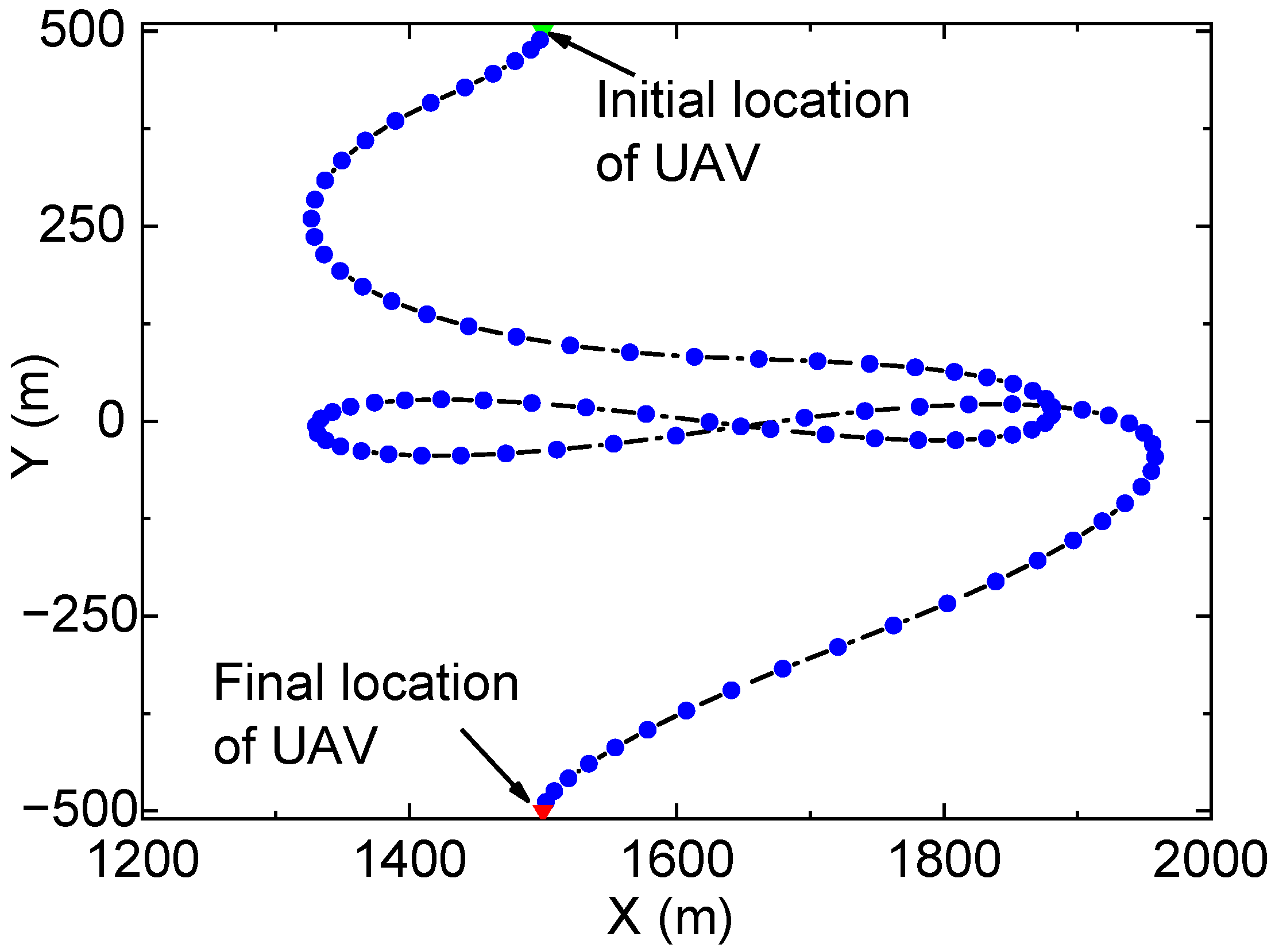
- For different scenarios, simulation results for energy efficiency maximized trajectories are provided. It is shown that the proposed iterative algorithm can effectively alleviate the data rate imbalance of the two links and obtain good energy efficiency. Moreover, the proposed algorithm always outperforms the existing scheme. Therefore, the proposed algorithm can be utilized for the practical implementation of the UAV-based hybrid FSO/RF system.
2. System Model
3. Performance Analysis
3.1. Energy Consumption
3.2. Throughput
3.3. Energy Efficiency
4. Trajectory Optimization of UAV
4.1. Problem Formulation
4.2. Problem Solving
| Algorithm 1 Proposed iterative algorithm. |
|
5. Numerical Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, J.-Y.; Ma, Y.; Lu, R.-R.; Wang, J.-B.; Lin, M.; Cheng, J. Hovering UAV-based FSO communications: Channel modeling, performance analysis, and parameter optimization. IEEE J. Sel. Areas Commun. 2021, 39, 2946–2959. [Google Scholar] [CrossRef]
- Liu, J.; Wang, J.-Y.; Zhang, B.; Wang, Q. Secrecy performance analysis of hybrid RF/VLC dual-hop relaying systems. Front. Phys. 2021, 9, 1–13. [Google Scholar] [CrossRef]
- Samimi, H.; Uysal, M. End-to-end performance of mixed RF/FSO transmission systems. J. Opt. Commun. Netw. 2013, 5, 1139–1144. [Google Scholar] [CrossRef]
- Nasab, E.S.; Uysal, M. Generalized performance analysis of mixed RF/FSO cooperative systems. IEEE Trans. Wirel. Commun. 2016, 15, 714–727. [Google Scholar] [CrossRef]
- Kong, H.; Lin, M.; Zhu, W.-P.; Amindavar, H.; Alouini, M.-S. Multiuser scheduling for asymmetric FSO/RF links in satellite-UAV-terrestrial networks. IEEE Wirel. Commun. Lett. 2020, 9, 1235–1239. [Google Scholar] [CrossRef]
- Sharma, S.R.S.; Vishwakarma, N.; Madhukumar, A. HAPS-based relaying for integrated space-air-ground networks with hybrid FSO/RF communication: A performance analysis. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1581–1599. [Google Scholar]
- Ajam, H.; Najafi, M.; Jamali, V.; Schober, R. Ergodic sum rate analysis of UAV-based relay networks with mixed RF-FSO channels. IEEE Open J. Commun. Soc. 2020, 1, 164–178. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-H.; Park, K.-H.; Ko, Y.-C.; Alouini, M.-S. Throughput maximization of mixed FSO/RF UAV-aided mobile relaying with a buffer. IEEE Trans. Wirel. Commun. 2021, 20, 683–694. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, D.; Ng, D.W.K.; Dai, L.; Schober, R. Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems. IEEE Trans. Commun. 2019, 67, 4281–4298. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar] [CrossRef] [Green Version]
- Jeong, S.; Simeone, O.; Kang, J. Mobile edge computing via a UAV-mounted cloudlet: Optimization of bit allocation and path planning. IEEE Trans. Veh. Technol. 2018, 67, 2049–2063. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Park, K.; Ko, Y.; Alouini, M. A UAV-mounted free space optical communication: Trajectory optimization for flight time. IEEE Trans. Wirel. Commun. 2020, 19, 1610–1621. [Google Scholar] [CrossRef]
- Abou-Rjeily, C.; Fawaz, W. Buffer-aided serial relaying for FSO communications: Asymptotic analysis and impact of relay placement. IEEE Trans. Wirel. Commun. 2018, 17, 8299–8313. [Google Scholar] [CrossRef]
- Al-Eryani, Y.F.; Salhab, A.M.; Zummo, S.A.; Alouini, M. Protocol design and performance analysis of multiuser mixed RF and hybrid FSO/RF relaying with buffers. IEEE/OSA J. Opt. Commun. Netw. 2018, 10, 309–321. [Google Scholar] [CrossRef]
- Sheng, M.; Xiu, X.-X. Average bit erro rate analysis for free-space optical communications over weak turbulence with pointing errors. Opt. Eng. 2012, 51, 1–5. [Google Scholar] [CrossRef]
- Wang, C.-X.; Ghazal, A.; Ai, B.; Liu, Y.; Fan, P. Channel measurements and models for high-speed train communication systems: A survey. IEEE Commun. Surv. Tutor. 2016, 18, 974–987. [Google Scholar] [CrossRef] [Green Version]
- Lapidoth, A.; Moser, S.M.; Wigger, M.A. On the capacity of free-space optical intensity channels. IEEE Trans. Inf. Theory 2009, 55, 4449–4461. [Google Scholar] [CrossRef] [Green Version]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory, 2nd ed.; John Wiley & Sons: Chichester, UK, 2006. [Google Scholar]
- Zappone, A.; Björnson, E.; Sanguinetti, L.; Jorswieck, E. Achieving global optimality for energy efficiency maximization in wireless networks. arXiv 2016, arXiv:1602.02923. [Google Scholar]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: New York, NY, USA, 2004. [Google Scholar]
- Dinkelbach, W. On nonlinear fractional programming. Manag. Sci. 1967, 13, 492–498. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbols | Values |
|---|---|---|
| Weight of UAV | m | |
| Gravity acceleration | g | |
| Location of node S | ||
| Location of node D | ||
| Initial location of UAV | ||
| Final location of UAV | ||
| Maximum velocity of UAV | ||
| Minimum velocity of UAV | ||
| Maximum acceleration of UAV | ||
| UAV’s parameters | , | |
| Total communication consumption of UAV | ||
| FSO link parameters | , , , , | , , , , |
| RF link parameters | , , , , | , , , , 2 |
| Time period | T | |
| Time-step size |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, R.-R.; Ma, Y.; Lin, S.-H.; Zhang, B.; Wang, Q.; Wang, J.-Y. Energy-Efficient Trajectory Optimization for UAV-Based Hybrid FSO/RF Communications with Buffer Constraints. Entropy 2021, 23, 1596. https://0-doi-org.brum.beds.ac.uk/10.3390/e23121596
Lu R-R, Ma Y, Lin S-H, Zhang B, Wang Q, Wang J-Y. Energy-Efficient Trajectory Optimization for UAV-Based Hybrid FSO/RF Communications with Buffer Constraints. Entropy. 2021; 23(12):1596. https://0-doi-org.brum.beds.ac.uk/10.3390/e23121596
Chicago/Turabian StyleLu, Rong-Rong, Yang Ma, Sheng-Hong Lin, Bingyuan Zhang, Qinglin Wang, and Jin-Yuan Wang. 2021. "Energy-Efficient Trajectory Optimization for UAV-Based Hybrid FSO/RF Communications with Buffer Constraints" Entropy 23, no. 12: 1596. https://0-doi-org.brum.beds.ac.uk/10.3390/e23121596