
A Novel Deep Transfer Learning Method for Intelligent Fault Diagnosis Based on Variational Mode Decomposition and Efficient Channel Attention

 , , ,
, , ,
Abstract
:1. Introduction
- Due to differences in the distribution of acquired vibration data, the effectiveness of the deep learning model diagnosis method is limited. Therefore, it is necessary to introduce signal preprocessing into the transfer learning diagnostic model.
- The original vibration signal is a typical non-stationary signal [24]. However, the commonly used Fourier transform method has insufficient processing ability for non-stationary signals (signals whose frequencies change with time). Although the EMD method eliminates the limitation of Fourier transform, it also has a serious mode aliasing problem.
- The signal preprocessing method and the intelligent diagnosis model based on transfer learning are not effectively related. An effective connection module is required between them instead of being directly preprocessed into new data for input.
- The signal preprocessing of the VMD is applied for the transfer fault diagnosis. The VMD algorithm is used to decompose original fault vibration signals into a series of intrinsic mode functions (IMFs) with specific bandwidth so that the transfer learning model can learn fault features better.
- To fuse the mode features after VMD decomposition more effectively, ECA is used to learn channel attention. This module avoids dimensionality reduction and effectively captures cross-channel interactions. Since different modes represent signals with different center frequencies, it makes sense to re-weight the channel features.
- A novel deep transfer learning method is proposed for intelligent fault diagnosis based on Variational Mode Decomposition and Efficient Channel Attention (VMD-ECA-DTN). Considering that it can accurately fit the domain-invariant representation of fault features, our proposed method has better performance (robustness and generalization) in transfer diagnosis tasks compared with the state-of-the-art methods.
2. Preliminaries
2.1. Domain Adaptation Problem
2.2. Variational Mode Decomposition
2.3. Efficient Channel Attention
3. The Proposed VMD-ECA-DTN Method
3.1. Architecture of the Proposed VMD-ECA-DTN
3.2. Optimization Objective of VMD-ECA-DTN
4. Experimental Results and Analysis
4.1. Dataset Introduction and Experiment Setup
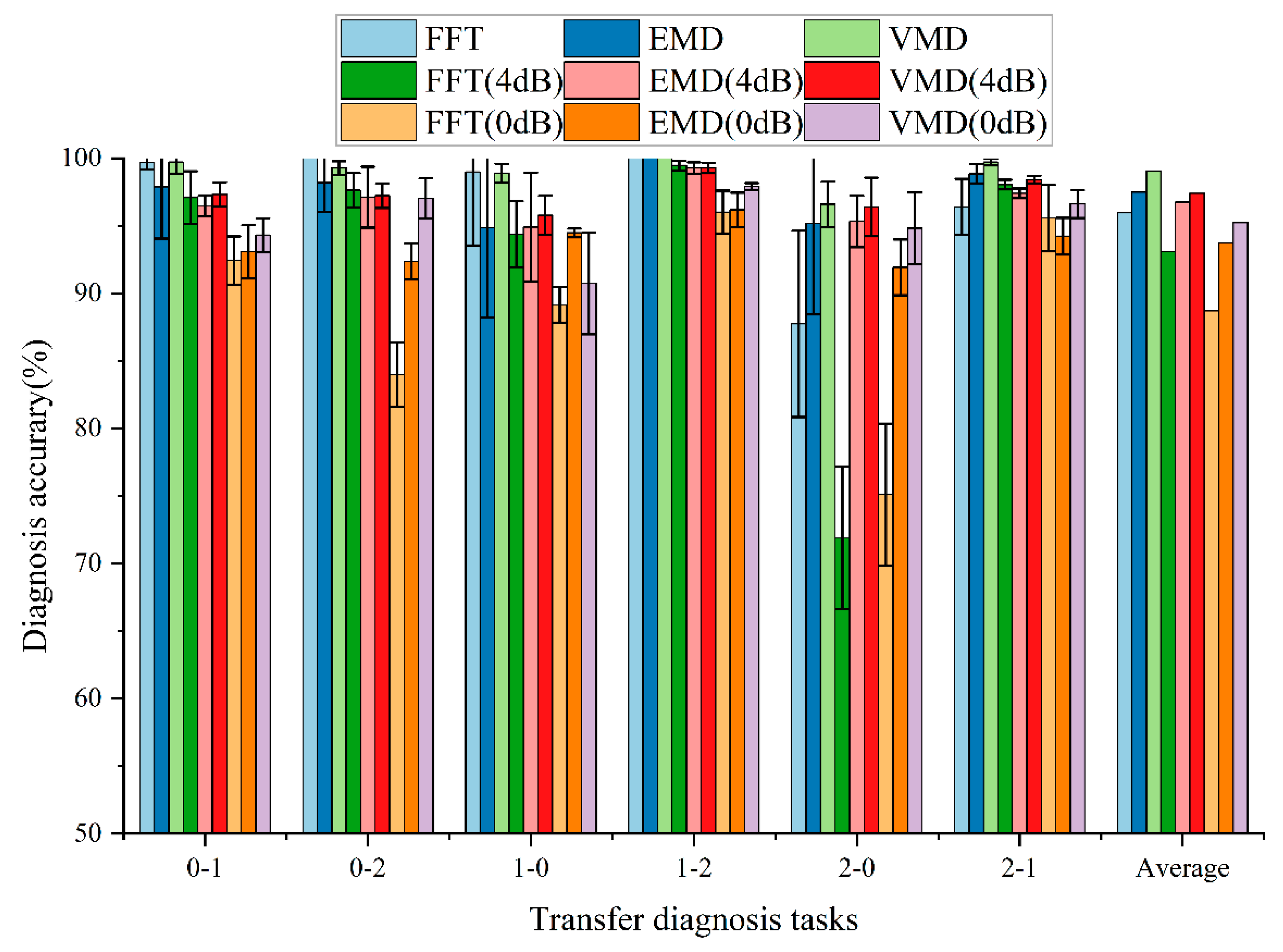
4.2. Comparison of Signal Preprocessing Methods
- FFT [34]: The basic idea of FFT (Fast Fourier Transform) is to decompose the original sequence of N points into a series of short sequences.
- EMD [35]: EMD (Empirical Mode Decomposition) is a signal processing method in the time-frequency domain, which is based on the time-scale characteristics of the data itself, without setting any basis function in advance. EMD has obvious advantages in processing non-stationary and nonlinear data and is suitable for analyzing nonlinear non-stationary signal sequences with a high signal-to-noise ratio.
- VMD: The signal decomposition method we use in the signal preprocessing stage. It shifts the acquisition of signal components into a variational framework. A non-recursive processing strategy is used to decompose the original signal by constructing and solving a constrained variational problem, which can effectively avoid problems such as modal aliasing, over-envelope, under-envelope, and boundary effects.
- When the original vibration signal is not added with Gaussian noise, the average accuracy of all signal preprocessing methods for the six transfer diagnosis tasks is more than 97.00%. After Gaussian noise is added to the original vibration signal, the diagnostic accuracy of all signal preprocessing methods is almost reduced. This shows that the addition of noise seriously affects the performance of the model. In addition, the higher the noise level, the more serious the performance of the intelligent fault diagnosis model decreases.
- At the same noise level, the FFT preprocessing method has the worst performance, while the VMD preprocessing method has the best performance. Although the VMD preprocessing method is not optimal in individual transfer diagnosis tasks (such as 0-2 transfer diagnosis task without adding noise), the VMD preprocessing method has the highest cross-domain diagnosis accuracy in most transfer diagnosis tasks as a whole. The results show that VMD preprocessing can provide better anti-noise and robustness for intelligent fault diagnosis models.
4.3. Comparison of Feature Fusion Methods
4.4. Comparison between the Proposed Method and State-Of-The-Art Methods
- Among the five methods, only WDCNN is not a method of domain adaptation, and its average classification accuracy is lower than that of the other four methods, indicating the effectiveness of the domain adaptive method for cross-domain diagnosis. After adding 0 dB noise to the original data, the average diagnostic accuracy of WDCNN is only 93.31%.
- Adding Gaussian noise to the original signal affects the ability of the intelligent fault diagnosis model to learn fault features. The proposed method achieves the best average performance in different noise environments. Even under 0 dB noise, the average diagnostic accuracy of the proposed method is 95.24%. This shows that the proposed method has better robustness and universality.
- In a specific transfer diagnostic task, the performance of the proposed method is not the best. For example, in the 0-1 diagnostic task with 0 dB noise, the diagnostic accuracy of the proposed method is only 90.73%. This may indicate that different levels of noise will affect VMD signal preprocessing, and thus affect neural network learning fault features. However, in most transfer diagnosis tasks, our proposed method is superior to other state-of-the-art methods. This again shows the effectiveness and robustness of our proposed method.
5. Conclusions
- An appropriate signal preprocessing method is beneficial to the transfer diagnosis model. The purpose of preprocessing is to denoise the signal and extract the frequency signal, which is useful for diagnostic tasks.
- Feature fusion is an important step in learning the main mode features. Compared with other fusion methods, the ECA module integrates the features of different modes, which facilitates the further learning of vibration signals by the diagnostic model.
- The combination of signal preprocessing and attention mechanisms can be used to extract meaningful features. Our proposed method has better performance (robustness and generalization) in transfer diagnosis tasks compared with state-of-the-art methods.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Parmar, U.; Pandya, D.H. Experimental Investigation of Cylindrical Bearing Fault Diagnosis with SVM. Mater. Today Proc. 2021, 44, 1286–1290. [Google Scholar] [CrossRef]
- Cerrada, M.; Zurita, G.; Cabrera, D.; Sánchez, R.-V.; Artés, M.; Li, C. Fault Diagnosis in Spur Gears Based on Genetic Algorithm and Random Forest. Mech. Syst. Signal Process. 2016, 70–71, 87–103. [Google Scholar] [CrossRef]
- Song, B.; Tan, S.; Shi, H.; Zhao, B. Fault Detection and Diagnosis via Standardized k Nearest Neighbor for Multimode Process. J. Taiwan Inst. Chem. Eng. 2020, 106, 1–8. [Google Scholar] [CrossRef]
- Amiruddin, A.; Zabiri, H.; Taqvi, S.A.A.; Tufa, L.D. Neural Network Applications in Fault Diagnosis and Detection: An Overview of Implementations in Engineering-Related Systems. NEURAL Comput. Appl. 2020, 32, 447–472. [Google Scholar] [CrossRef]
- Sun, T.D.; Yu, G.; Gao, M.; Zhao, L.L.; Bai, C.; Yang, W.Q. Fault Diagnosis Methods Based on Machine Learning and Its Applications for Wind Turbines: A Review. IEEE Access 2021, 9, 147481–147511. [Google Scholar] [CrossRef]
- Dong, Z.; Xiaoyue, J.; Zhou, G.; Gao, M.; Donglian, Q. Multimodal Neuromorphic Sensory-Processing System with Memristor Circuits for Smart Home Applications. IEEE Trans. Ind. Appl. 2022, in press. [Google Scholar] [CrossRef]
- Ji, X.Y.; Dong, Z.K.; Lai, C.S.; Qi, D.L. A Brain-Inspired In-Memory Computing System for Neuronal Communication via Memristive Circuits. IEEE Commun. Mag. 2022, 60, 100–106. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Deep Learning Algorithms for Bearing Fault Diagnostics—A Comprehensive Review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional Neural Network Based Fault Detection for Rotating Machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Zhao, M.H.; Zhong, S.S.; Fu, X.Y.; Tang, B.P.; Pecht, M. Deep Residual Shrinkage Networks for Fault Diagnosis. IEEE Trans. Ind. Inform. 2020, 16, 4681–4690. [Google Scholar] [CrossRef]
- Lei, J.H.; Liu, C.; Jiang, D.X. Fault Diagnosis of Wind Turbine Based on Long Short-Term Memory Networks. Renew. Energy 2019, 133, 422–432. [Google Scholar] [CrossRef]
- Li, C.; Zhang, S.H.; Qin, Y.; Estupinan, E. A Systematic Review of Deep Transfer Learning for Machinery Fault Diagnosis. Neurocomputing 2020, 407, 121–135. [Google Scholar] [CrossRef]
- Li, J.; Lin, M.; Li, Y.; Wang, X. Transfer Learning with Limited Labeled Data for Fault Diagnosis in Nuclear Power Plants. Nucl. Eng. Des. 2022, 390, 111690. [Google Scholar] [CrossRef]
- Wang, M.; Deng, W.H. Deep Visual Domain Adaptation: A Survey. Neurocomputing 2018, 312, 135–153. [Google Scholar] [CrossRef]
- Zhang, S.; Su, L.; Gu, J.; Li, K.; Zhou, L.; Pecht, M. Rotating Machinery Fault Detection and Diagnosis Based on Deep Domain Adaptation: A Survey. Chinese J. Aeronaut. 2021, in press. [Google Scholar] [CrossRef]
- Guo, L.; Lei, Y.G.; Xing, S.B.; Yan, T.; Li, N.P. Deep Convolutional Transfer Learning Network: A New Method for Intelligent Fault Diagnosis of Machines With Unlabeled Data. IEEE Trans. Ind. Electron. 2019, 66, 7316–7325. [Google Scholar] [CrossRef]
- Sejdinovic, D.; Sriperumbudur, B.; Gretton, A.; Fukumizu, K. Equivalence of Distance-Based and RKHS-Based Statistics in Hypothesis Testing. Ann. Stats 2013, 41, 2263–2291. [Google Scholar] [CrossRef]
- Jiao, J.; Zhao, M.; Lin, J.; Liang, K. Residual Joint Adaptation Adversarial Network for Intelligent Transfer Fault Diagnosis. Mech. Syst. Signal Process. 2020, 145, 106962. [Google Scholar] [CrossRef]
- Qian, Q.; Qin, Y.; Wang, Y.; Liu, F.Q. A New Deep Transfer Learning Network Based on Convolutional Auto-Encoder for Mechanical Fault Diagnosis. Measurement 2021, 178, 109352. [Google Scholar] [CrossRef]
- Li, X.D.; Zheng, J.H.; Li, M.T.; Ma, W.Z.; Hu, Y. Frequency-Domain Fusing Convolutional Neural Network: A Unified Architecture Improving Effect of Domain Adaptation for Fault Diagnosis. Sensors 2021, 21, 450. [Google Scholar] [CrossRef]
- Ben Ali, J.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of Empirical Mode Decomposition and Artificial Neural Network for Automatic Bearing Fault Diagnosis Based on Vibration Signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, M.M.; Zhang, Y.P.; Xu, Z.D.; Huang, J.G.; Fang, X. A Bearing Fault Diagnosis Model Based on Deformable Atrous Convolution and Squeeze-and-Excitation Aggregation. IEEE Trans. Instrum. Meas. 2021, 70, 3524410. [Google Scholar] [CrossRef]
- Wu, H.; Li, J.; Zhang, Q.; Tao, J.; Meng, Z. Intelligent Fault Diagnosis of Rolling Bearings under Varying Operating Conditions Based on Domain-Adversarial Neural Network and Attention Mechanism. ISA Trans. 2022, in press. [Google Scholar] [CrossRef]
- Liu, R.N.; Yang, B.Y.; Zio, E.; Chen, X.F. Artificial Intelligence for Fault Diagnosis of Rotating Machinery: A Review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Zhang, H.; Wang, L. A Parameter-Adaptive VMD Method Based on Grasshopper Optimization Algorithm to Analyze Vibration Signals from Rotating Machinery. Mech. Syst. Signal Process. 2018, 108, 58–72. [Google Scholar] [CrossRef]
- Zhang, J.L.; Wu, J.M.; Hu, B.B.; Tang, J.H. Intelligent Fault Diagnosis of Rolling Bearings Using Variational Mode Decomposition and Self-Organizing Feature Map. J. Vib. Control 2020, 26, 1886–1897. [Google Scholar] [CrossRef]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 11531–11539. [Google Scholar]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E.H. Squeeze-and-Excitation Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 2011–2023. [Google Scholar] [CrossRef]
- Niu, G.X.; Wang, X.; Golda, M.; Mastro, S.; Zhang, B. An Optimized Adaptive PReLU-DBN for Rolling Element Bearing Fault Diagnosis. Neurocomputing 2021, 445, 26–34. [Google Scholar] [CrossRef]
- Long, M.; Zhu, H.; Wang, J.; Jordan, M.I. Deep Transfer Learning with Joint Adaptation Networks. arXiv 2016, arXiv:1605.06636. [Google Scholar]
- Smith, W.A.; Randall, R.B. Rolling Element Bearing Diagnostics Using the Case Western Reserve University Data: A Benchmark Study. Mech. Syst. Signal Process. 2015, 64–65, 100–131. [Google Scholar] [CrossRef]
- Naylor, G.; Johannesson, R.B. Long-Term Signal-to-Noise Ratio at the Input and Output of Amplitude-Compression Systems. J. Am. Acad. Audiol. 2009, 20, 161–171. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.Z.; Qi, J.; Xu, H.; Wang, Y.D.; Liu, L.; Gao, D.J. Fault Diagnosis Method Based on FFT-RPCA-SVM for Cascaded-Multilevel Inverter. ISA Trans. 2016, 60, 156–163. [Google Scholar] [CrossRef]
- Vashishtha, G.; Chauhan, S.; Kumar, A.; Kumar, R. An Ameliorated African Vulture Optimization Algorithm to Diagnose the Rolling Bearing Defects. Meas. Sci. Technol. 2022, 33, 075013. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A New Deep Learning Model for Fault Diagnosis with Good Anti-Noise and Domain Adaptation Ability on Raw Vibration Signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef]
- Fu, S.; Zhang, Y.; Lin, L.; Zhao, M.; Zhong, S. Deep Residual LSTM with Domain-Invariance for Remaining Useful Life Prediction across Domains. Reliab. Eng. Syst. Saf. 2021, 216, 108012. [Google Scholar] [CrossRef]
- Mao, W.; Ding, L.; Liu, Y.; Afshari, S.S.; Liang, X. A New Deep Domain Adaptation Method with Joint Adversarial Training for Online Detection of Bearing Early Fault. ISA Trans. 2021, 122, 444–458. [Google Scholar] [CrossRef]
- Han, T.; Liu, C.; Yang, W.G.; Jiang, D.X. Deep Transfer Network with Joint Distribution Adaptation: A New Intelligent Fault Diagnosis Framework for Industry Application. ISA Trans. 2020, 97, 269–281. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Layer | Kernel Size | Stride | Channel Size | Input Size | Output Size |
|---|---|---|---|---|---|---|
| Input | Reshape | / | / | / | / | (64, 1, 1024) |
| VMD | VMD output | / | / | / | / | (64, 5, 1024) |
| ECA | Ada-Avg-Pool | / | / | / | (64, 5, 1024) | (64, 5, 1) |
| Reshape | / | / | / | (64, 5, 1) | (64, 1, 5) | |
| Conv | 1 | 1 | 1 | (64, 1, 5) | (64, 1, 5) | |
| Sigmoid | / | / | / | (64, 1, 5) | (64, 1, 5) | |
| Reshape | / | / | / | (64, 1, 5) | (64, 5, 1) | |
| Multiplier | / | / | / | (64, 5, 1) (64, 1, 1024) | (64, 1, 1024) | |
| CNN feature extractor | Conv | 15 | 1 | 16 | (64, 1, 1024) | (64, 16, 1010) |
| BN | / | / | / | (64, 16, 1010) | (64, 16, 1010) | |
| Conv | 3 | 1 | 32 | (64, 16, 1010) | (64, 32, 1008) | |
| BN | / | / | / | (64, 32, 1008) | (64, 32, 1008) | |
| Max-Pool | 2 | 2 | 32 | (64, 32, 1008) | (64, 32, 504) | |
| Conv | 3 | 1 | 64 | (64, 32, 504) | (64, 64, 502) | |
| BN | / | / | / | (64, 64, 502) | (64, 64, 502) | |
| Conv | 3 | 1 | 128 | (64, 64, 502) | (64, 128, 500) | |
| BN | / | / | / | (64, 128, 500) | (64, 128, 500) | |
| Ada-Max-Pool | / | / | / | (64, 128, 500) | (64, 128, 4) | |
| Reshape | / | / | / | (64, 128, 4) | (64, 512) | |
| FC | / | / | / | (64, 512) | (64, 256) | |
| Dropout | / | / | / | (64, 256) | (64, 256) | |
| Fault classifier (Output) | FC | / | / | / | (64, 256) | (64, 128) |
| Dropout | / | / | / | (64, 128) | (64, 128) | |
| FC | / | / | / | (64, 128) | (64, 10) | |
| Distribution discrepancy metrics | FC | / | / | / | (64, 256) | (64, 128) |
| Dropout | / | / | / | (64, 128) | (64, 128) | |
| FC | / | / | / | (64, 128) | (64, 10) |
| Task Code | Speed (rpm) | Load (HP) |
|---|---|---|
| 0 | 1730 | 0 |
| 1 | 1750 | 1 |
| 2 | 1772 | 2 |
| Transfer Diagnosis Task | Training Dataset | Validation Dataset (Target Domain Data: B) | Testing Dataset (Target Domain Data: C) | |
|---|---|---|---|---|
| Source Domain Data | Target Domain Data: A | |||
| x − y (x, y ∈ [0, 2]; x, y ∈ N; x ≠ y) | Labeled samples: 1000 | Unlabeled samples: 1000 | Samples: 300 | Samples: 300 |
| 0-1 | 0-2 | 1-0 | 1-2 | 2-0 | 2-1 | Average | |
|---|---|---|---|---|---|---|---|
| FFT | 99.68 ± 0.49 | 100.00 ± 0.00 | 98.98 ± 5.45 | 100.00 ± 0.00 | 87.74 ± 6.90 | 96.39 ± 2.07 | 97.13 |
| EMD | 97.88 ± 3.82 | 98.20 ± 2.18 | 94.86 ± 6.66 | 100.00 ± 0.00 | 95.17 ± 6.72 | 98.84 ± 0.73 | 97.49 |
| VMD | 99.71 ± 0.88 | 99.28 ± 0.51 | 98.89 ± 0.70 | 100.00 ± 0.00 | 96.60 ± 1.68 | 99.71 ± 0.25 | 99.03 |
| FFT(4 dB) | 97.08 ± 1.95 | 97.62 ± 1.29 | 94.38 ± 2.44 | 99.46 ± 0.37 | 71.90 ± 5.25 | 98.05 ± 0.36 | 93.08 |
| EMD(4 dB) | 96.46 ± 0.75 | 97.11 ± 2.25 | 94.90 ± 4.04 | 99.28 ± 0.42 | 95.32 ± 1.91 | 97.40 ± 0.36 | 96.75 |
| VMD(4 dB) | 97.32 ± 0.88 | 97.22 ± 0.90 | 95.77 ± 1.45 | 99.28 ± 0.39 | 96.39 ± 2.16 | 98.41 ± 0.28 | 97.40 |
| FFT(0 dB) | 92.42 ± 1.79 | 83.98 ± 2.39 | 89.14 ± 1.31 | 96.00 ± 1.59 | 75.10 ± 5.25 | 95.56 ± 2.46 | 88.70 |
| EMD(0 dB) | 93.07 ± 1.98 | 92.35 ± 1.33 | 94.47 ± 0.32 | 96.17 ± 1.28 | 91.92 ± 2.06 | 94.23 ± 1.36 | 93.70 |
| VMD(0 dB) | 94.30 ± 1.24 | 97.04 ± 1.48 | 90.73 ± 3.77 | 97.91 ± 0.25 | 94.81 ± 2.67 | 96.61 ± 1.03 | 95.24 |
| 0-1 | 0-2 | 1-0 | 1-2 | 2-0 | 2-1 | Average | |
|---|---|---|---|---|---|---|---|
| Concatenate | 99.85 ± 0.18 | 98.84 ± 0.85 | 97.96 ± 4.98 | 99.35 ± 0.10 | 96.94 ± 0.89 | 99.57 ± 0.50 | 98.75 |
| Add | 99.93 ± 0.28 | 98.98 ± 5.28 | 89.20 ± 4.89 | 99.93 ± 0.19 | 94.47 ± 7.60 | 98.92 ± 1.46 | 96.90 |
| SEA | 99.64 ± 3.86 | 98.41 ± 0.64 | 97.96 ± 7.42 | 99.28 ± 0.47 | 95.58 ± 4.85 | 99.64 ± 0.59 | 98.42 |
| ECA | 99.71 ± 0.88 | 99.28 ± 0.51 | 98.89 ± 0.70 | 100.00 ± 0.00 | 96.60 ± 1.68 | 99.71 ± 0.25 | 99.03 |
| 0-1 | 0-2 | 1-0 | 1-2 | 2-0 | 2-1 | Average | |
|---|---|---|---|---|---|---|---|
| WDCNN | 96.62 ± 2.34 | 94.61 ± 3.35 | 98.36 ± 0.81 | 99.98 ± 0.06 | 97.50 ± 2.25 | 96.36 ± 1.59 | 97.24 |
| DDC | 98.15 ± 2.06 | 98.77 ± 1.93 | 97.79 ± 1.50 | 100.00 ± 0.00 | 98.89 ± 3.74 | 98.48 ± 0.57 | 98.68 |
| DANN | 99.42 ± 1.03 | 99.20 ± 1.44 | 99.23 ± 0.18 | 99.71 ± 0.77 | 97.79 ± 3.12 | 95.24 ± 1.64 | 98.43 |
| DTN | 97.45 ± 0.80 | 95.24 ± 2.36 | 97.70 ± 1.38 | 100.00 ± 0.00 | 98.72 ± 0.56 | 99.49 ± 0.68 | 98.10 |
| Proposed | 99.71 ± 0.88 | 99.28 ± 0.51 | 98.89 ± 0.70 | 100.00 ± 0.00 | 96.60 ± 1.68 | 99.71 ± 0.25 | 99.03 |
| WDCNN(4 dB) | 92.33 ± 3.67 | 95.41 ± 2.53 | 96.25 ± 1.43 | 97.16 ± 0.97 | 95.02 ± 2.39 | 95.41 ± 0.96 | 95.26 |
| DDC(4 dB) | 95.17 ± 2.10 | 98.13 ± 3.75 | 96.43 ± 0.71 | 98.56 ± 0.74 | 95.66 ± 1.59 | 96.68 ± 2.43 | 96.77 |
| DANN(4 dB) | 93.72 ± 4.11 | 97.47 ± 4.42 | 96.60 ± 3.77 | 99.28 ± 0.59 | 95.92 ± 1.23 | 96.68 ± 1.21 | 96.61 |
| DTN(4 dB) | 97.50 ± 0.32 | 97.46 ± 1.02 | 97.11 ± 0.93 | 98.63 ± 2.07 | 95.49 ± 2.35 | 96.83 ± 1.16 | 97.17 |
| Proposed(4 dB) | 97.32 ± 0.88 | 97.22 ± 0.90 | 95.77 ± 1.45 | 99.28 ± 0.39 | 96.39 ± 2.16 | 98.41 ± 0.28 | 97.40 |
| WDCNN(0 dB) | 93.33 ± 1.64 | 93.09 ± 2.03 | 91.90 ± 2.91 | 95.28 ± 0.65 | 91.08 ± 3.93 | 95.19 ± 1.24 | 93.31 |
| DDC(0 dB) | 93.65 ± 2.67 | 94.08 ± 1.54 | 94.05 ± 2.52 | 96.32 ± 1.33 | 93.03 ± 1.47 | 93.80 ± 2.70 | 94.15 |
| DANN(0 dB) | 94.44 ± 1.78 | 95.17 ± 1.80 | 92.93 ± 2.58 | 97.55 ± 1.13 | 92.35 ± 2.22 | 95.45 ± 1.34 | 94.65 |
| DTN(0 dB) | 92.71 ± 0.85 | 93.80 ± 2.13 | 93.11 ± 1.38 | 96.32 ± 1.01 | 92.94 ± 1.85 | 95.02 ± 1.67 | 93.98 |
| Proposed(0 dB) | 94.30 ± 1.24 | 97.04 ± 1.48 | 90.73 ± 3.77 | 97.91 ± 0.25 | 94.81 ± 2.67 | 96.61 ± 1.03 | 95.24 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Zheng, X.; Bao, Z.; He, Z.; Gao, M.; Song, W. A Novel Deep Transfer Learning Method for Intelligent Fault Diagnosis Based on Variational Mode Decomposition and Efficient Channel Attention. Entropy 2022, 24, 1087. https://0-doi-org.brum.beds.ac.uk/10.3390/e24081087
Liu C, Zheng X, Bao Z, He Z, Gao M, Song W. A Novel Deep Transfer Learning Method for Intelligent Fault Diagnosis Based on Variational Mode Decomposition and Efficient Channel Attention. Entropy. 2022; 24(8):1087. https://0-doi-org.brum.beds.ac.uk/10.3390/e24081087
Chicago/Turabian StyleLiu, Caiming, Xiaorong Zheng, Zhengyi Bao, Zhiwei He, Mingyu Gao, and Wenlong Song. 2022. "A Novel Deep Transfer Learning Method for Intelligent Fault Diagnosis Based on Variational Mode Decomposition and Efficient Channel Attention" Entropy 24, no. 8: 1087. https://0-doi-org.brum.beds.ac.uk/10.3390/e24081087