

A Short-Term Hybrid TCN-GRU Prediction Model of Bike-Sharing Demand Based on Travel Characteristics Mining

Abstract
:1. Introduction
2. Data Overview and Preprocessing
2.1. Data Overview
2.2. Data Preprocessing
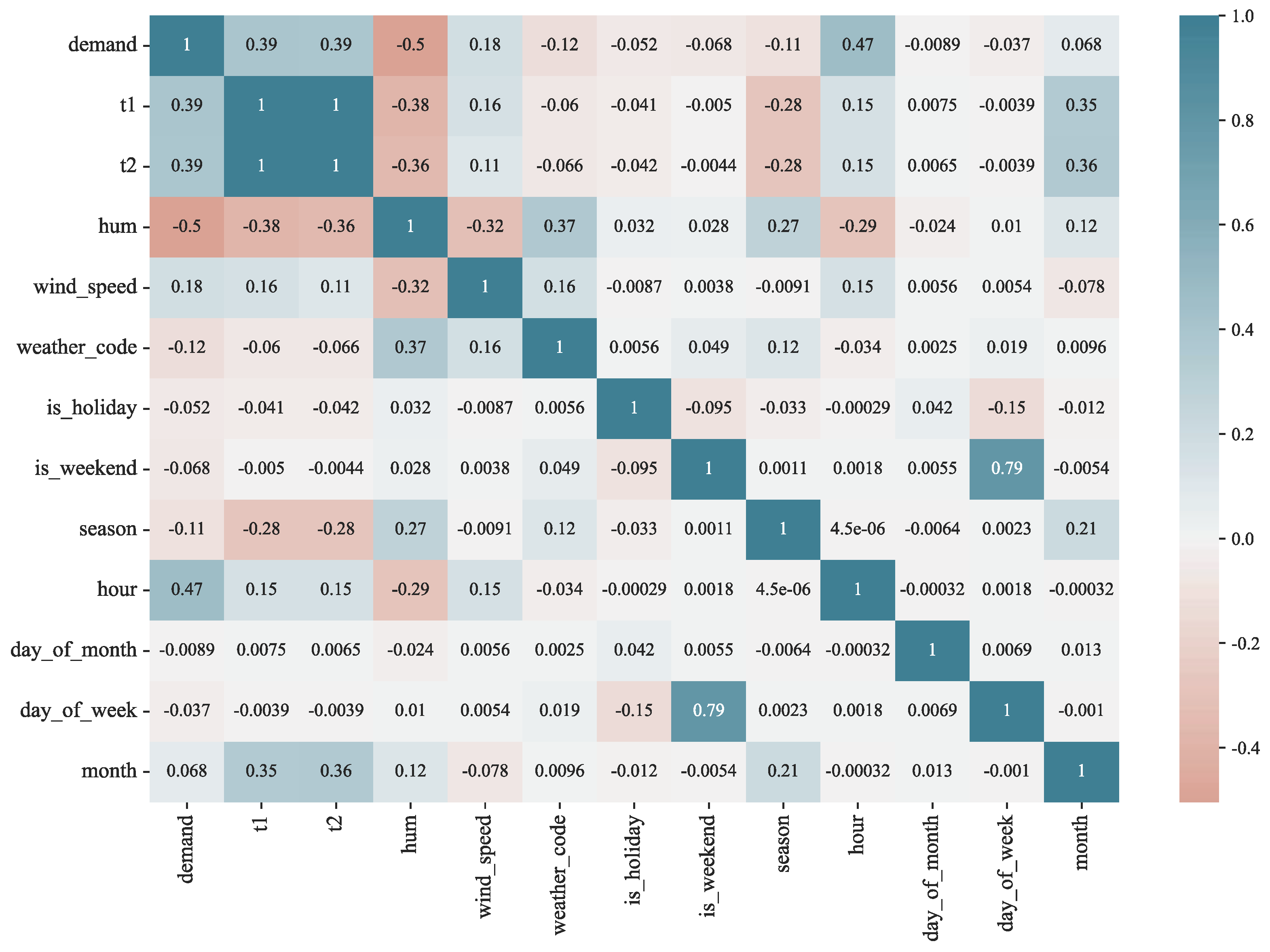
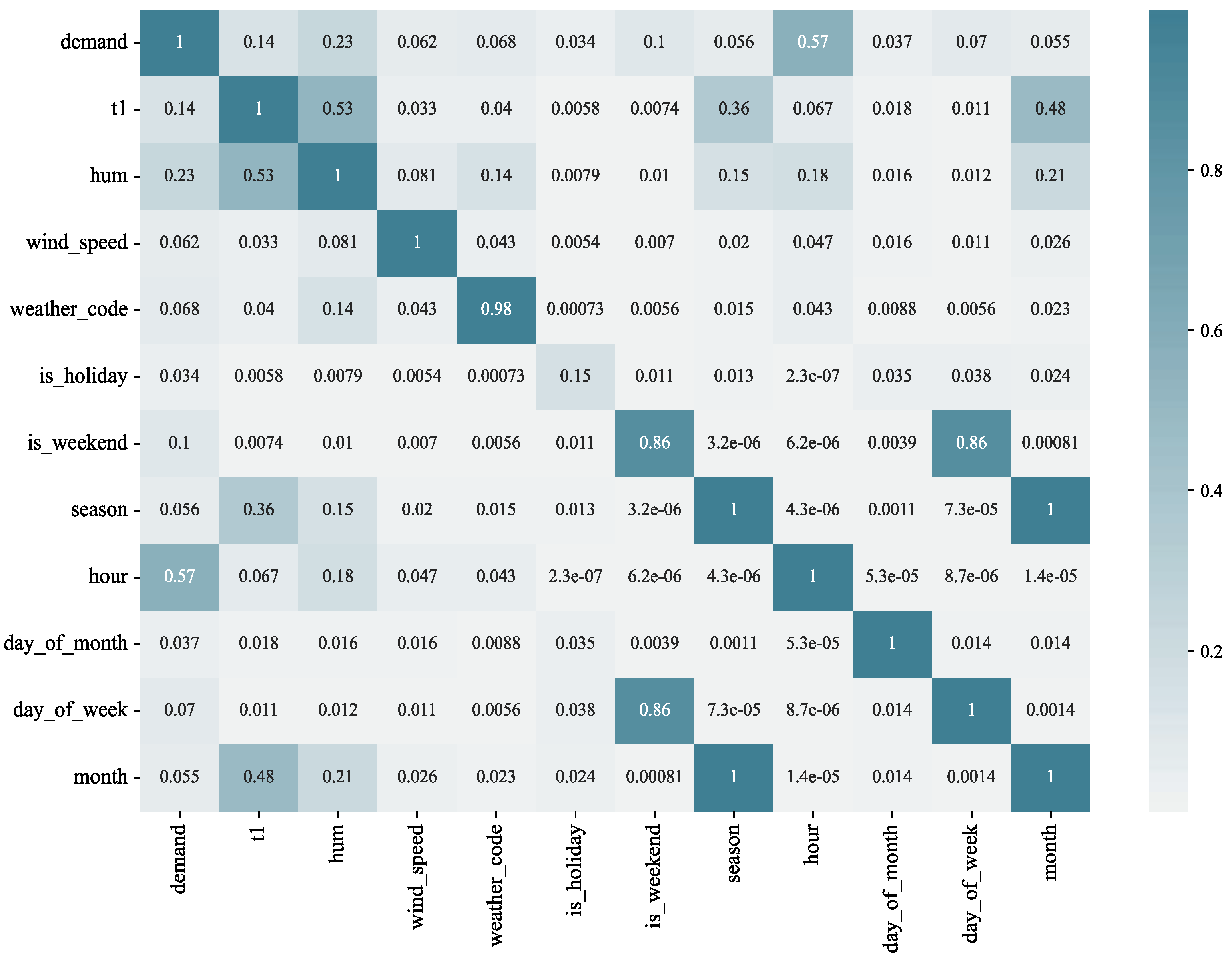
2.3. Correlation Analysis
3. Bike-Sharing Travel Characteristics Analysis
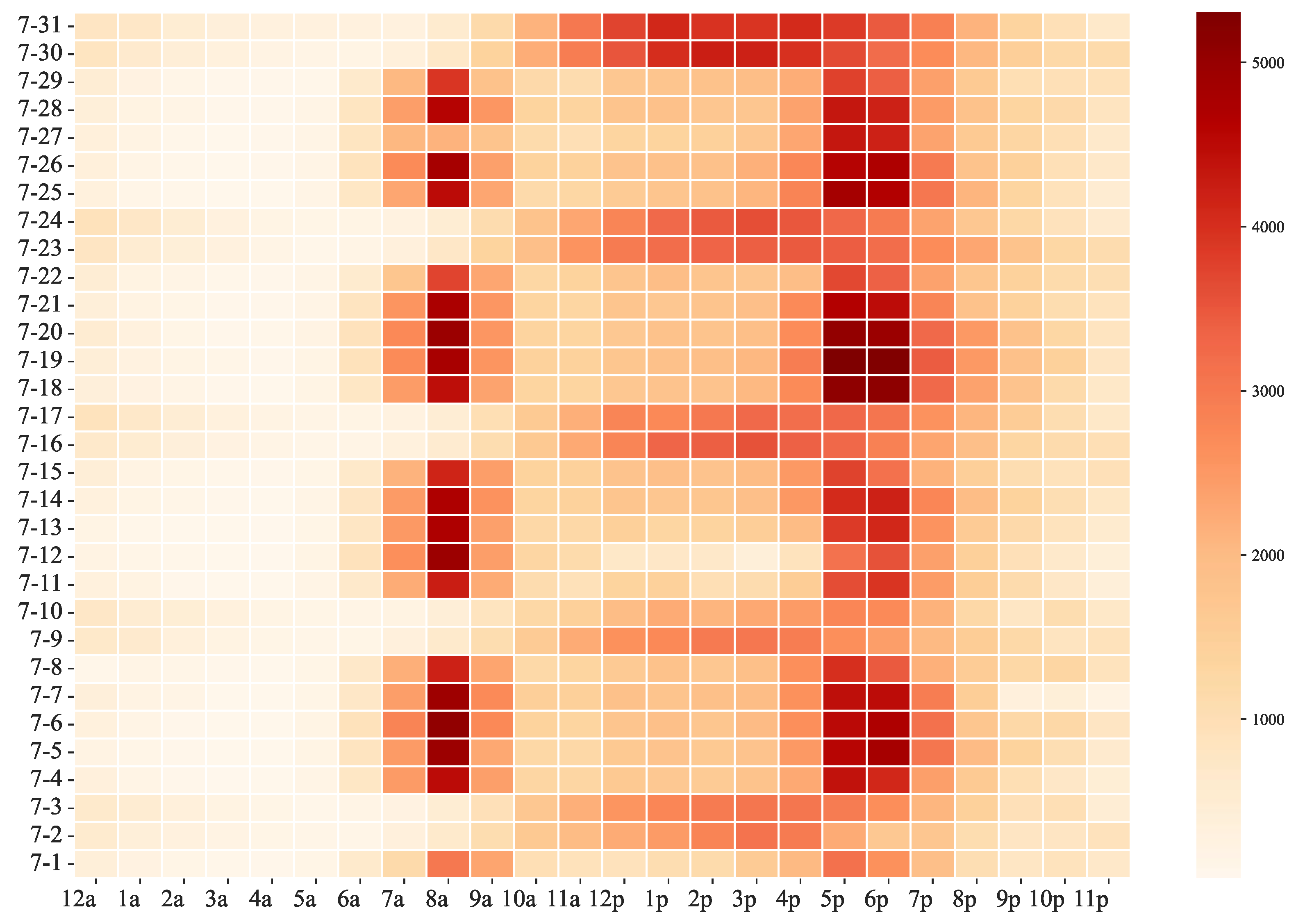
3.1. Bike-Sharing Travel: Time Characteristics Analysis
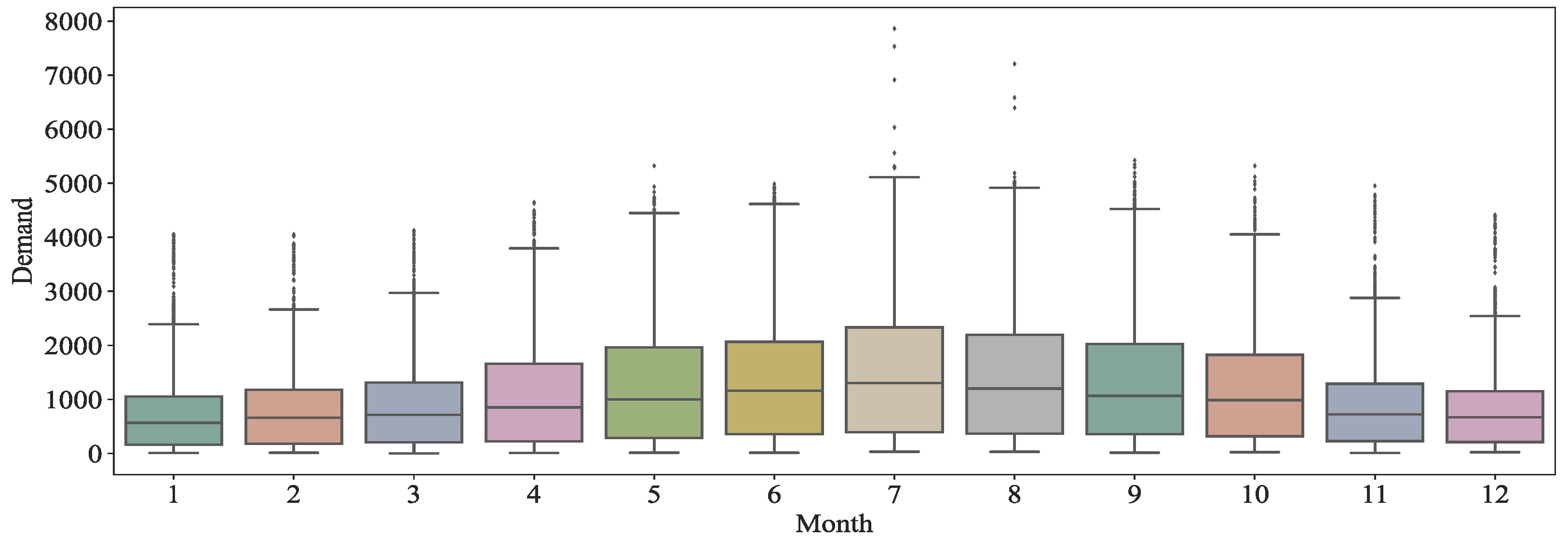
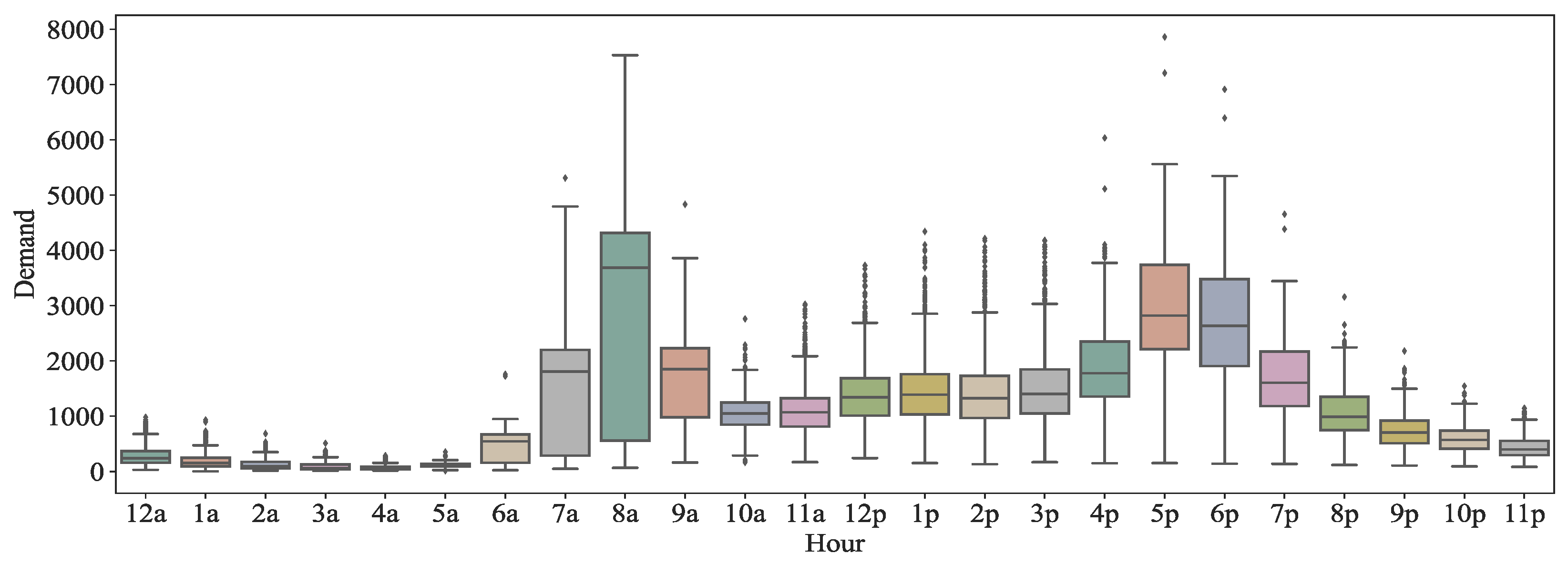
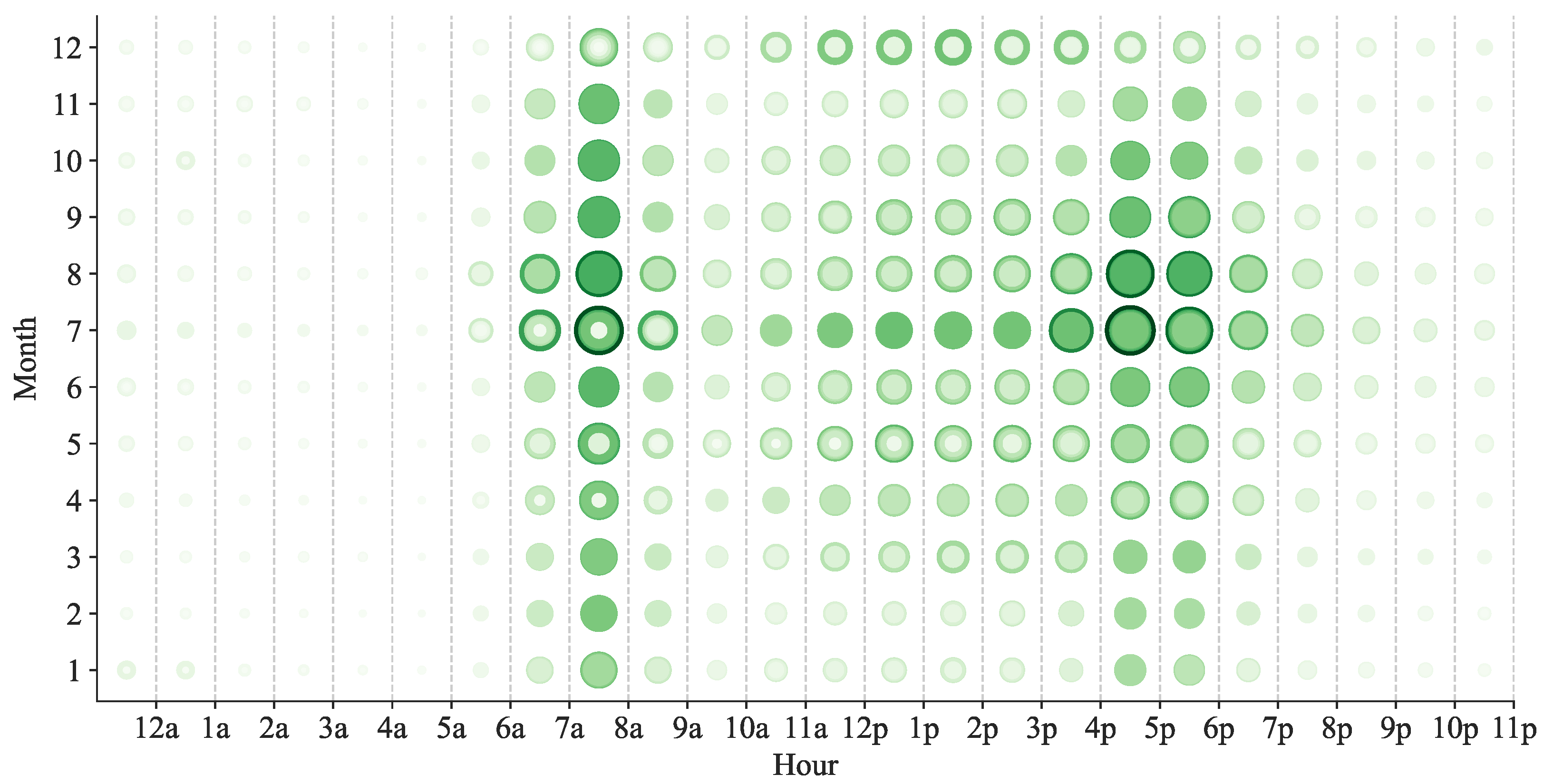
3.1.1. Demand Varies with the Hours and Months
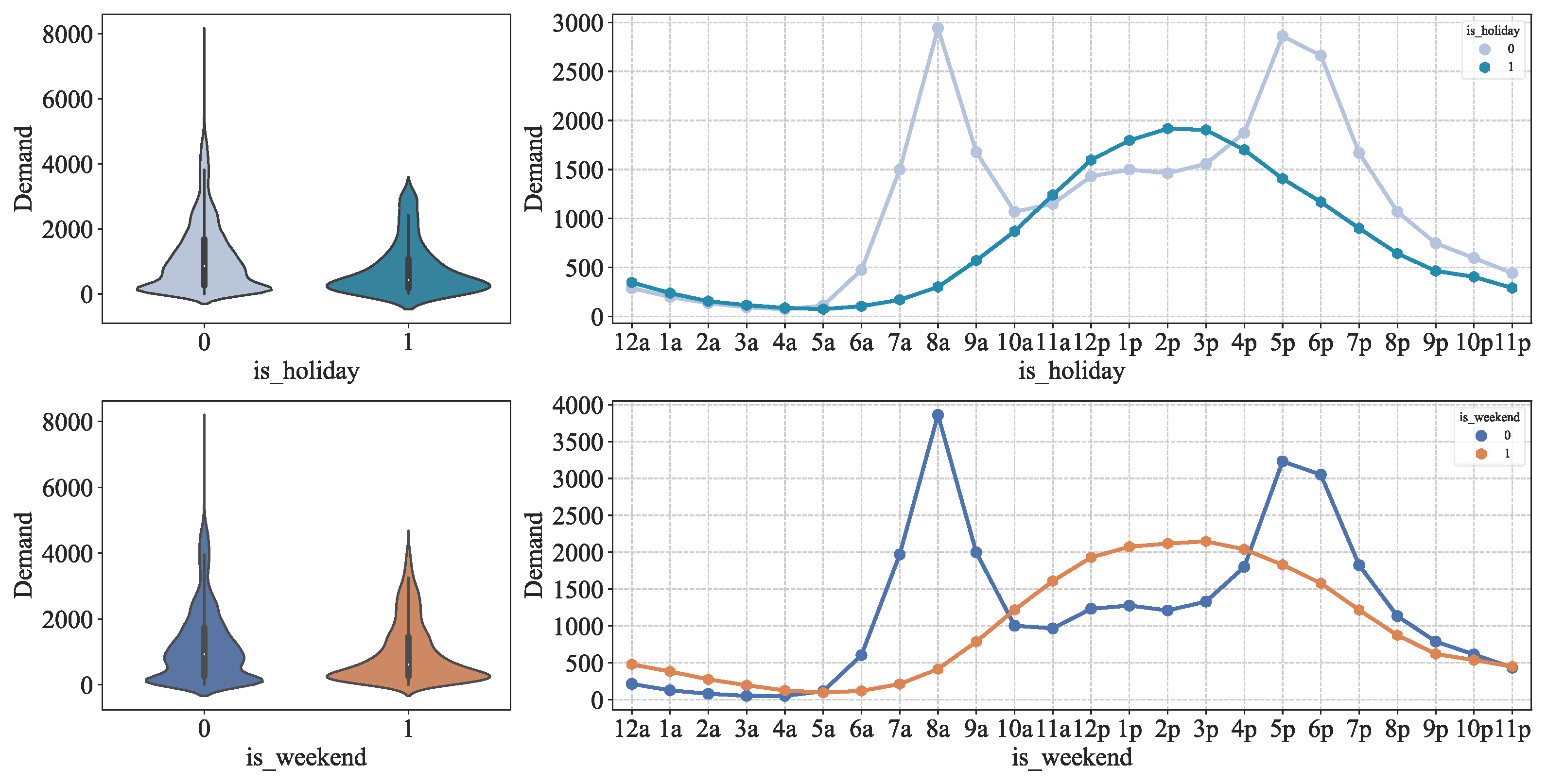
3.1.2. Demand Varies with Working and Nonworking Days
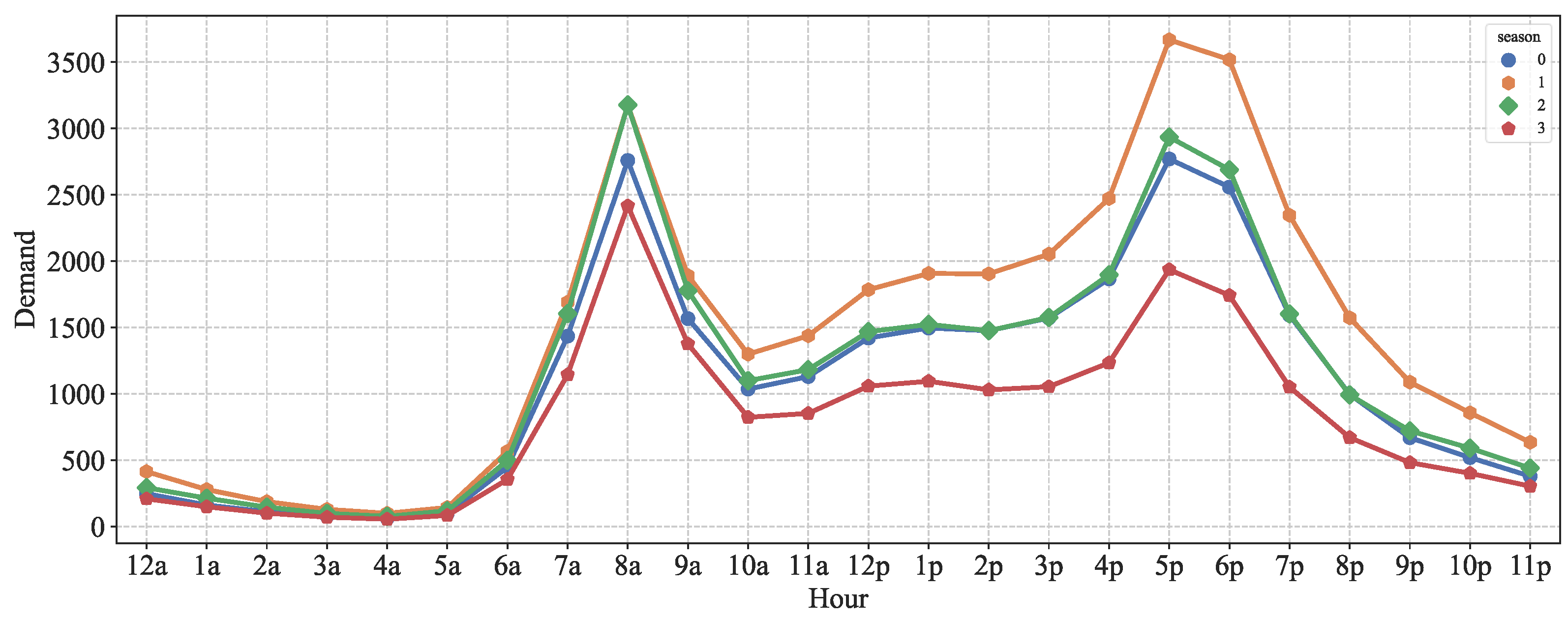
3.1.3. Demand Varies with the Season
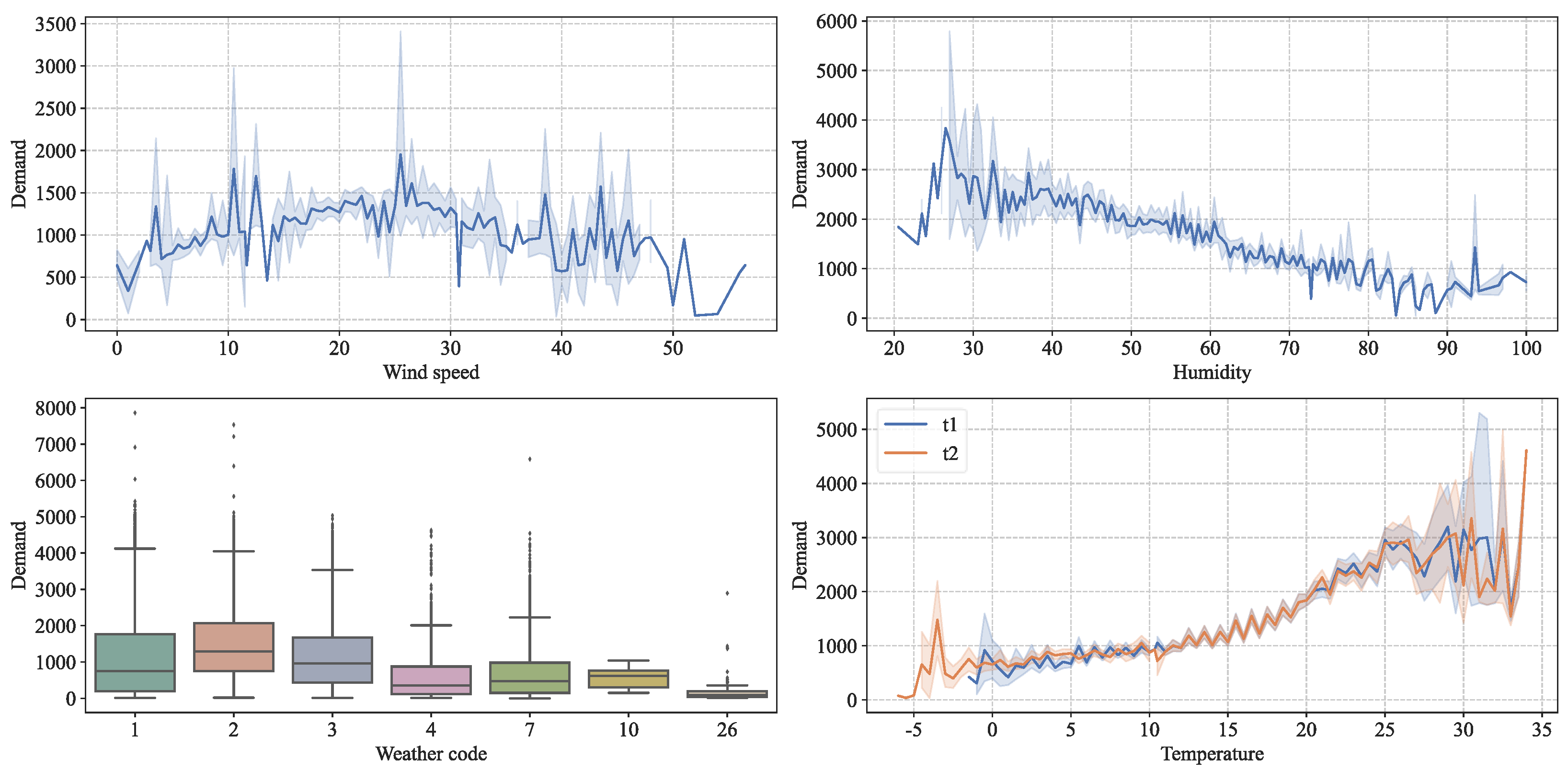
3.2. Bike-Sharing Travel: Meteorology Characteristics Analysis
3.3. Bike-Sharing Travel: Characteristics Analysis Based on Granger Causality Test
4. Bike-Sharing Short-Term Demand Prediction
4.1. Temporal Convolutional Network (TCN)
4.1.1. TCN Modeling
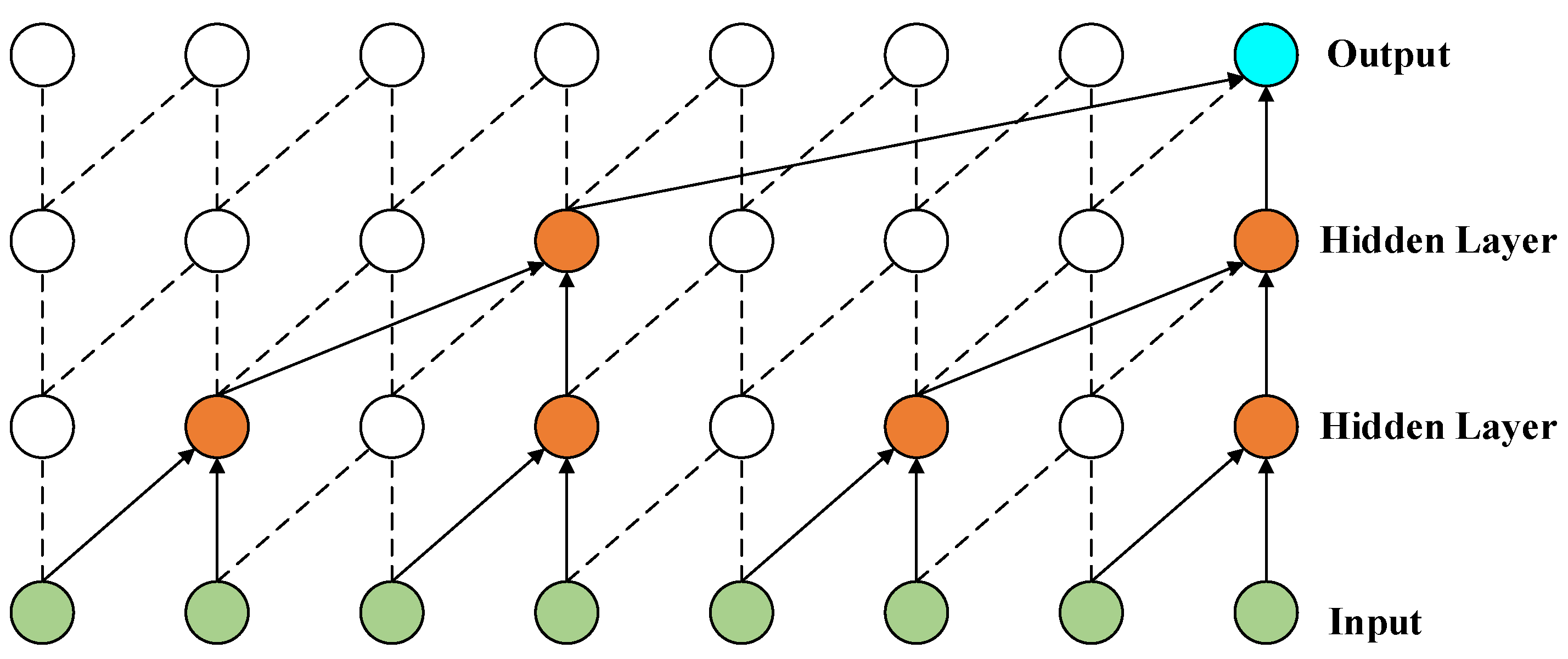
4.1.2. Extended Causal Convolution
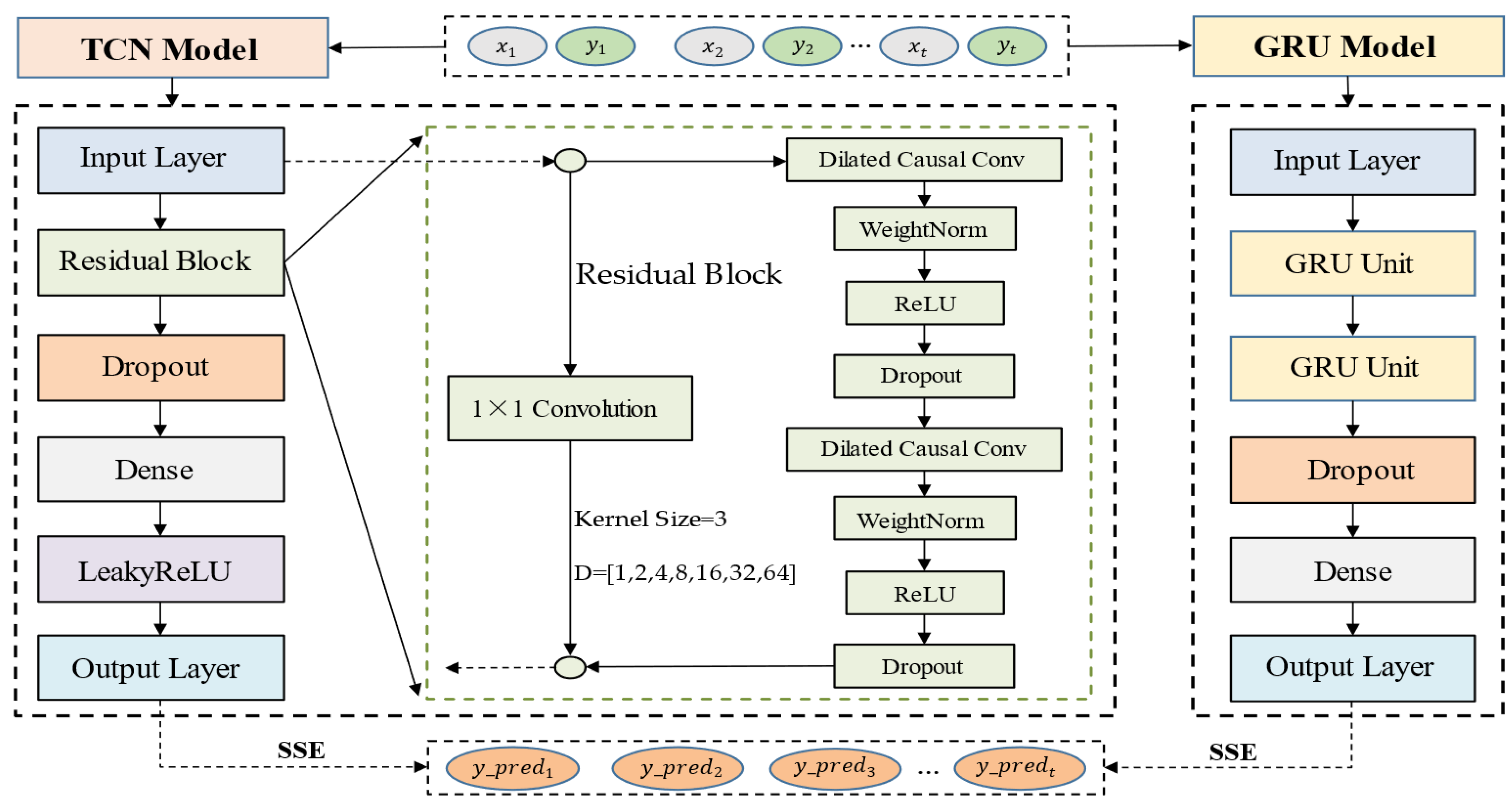
4.1.3. Residual Block
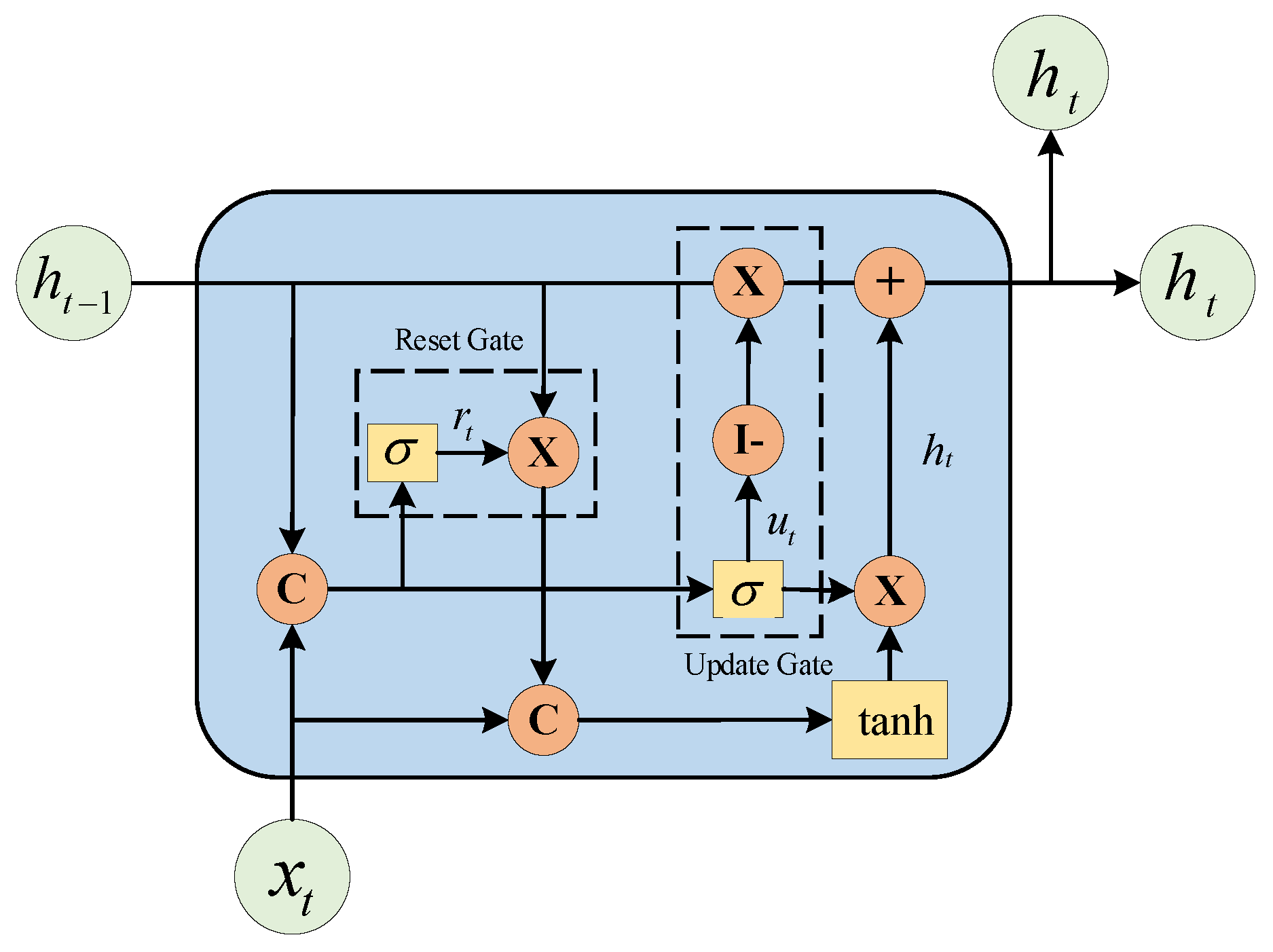
4.2. Gated Recurrent Unit (GRU)
4.3. Hybrid Multivariate Bike-Sharing Demand Prediction Model
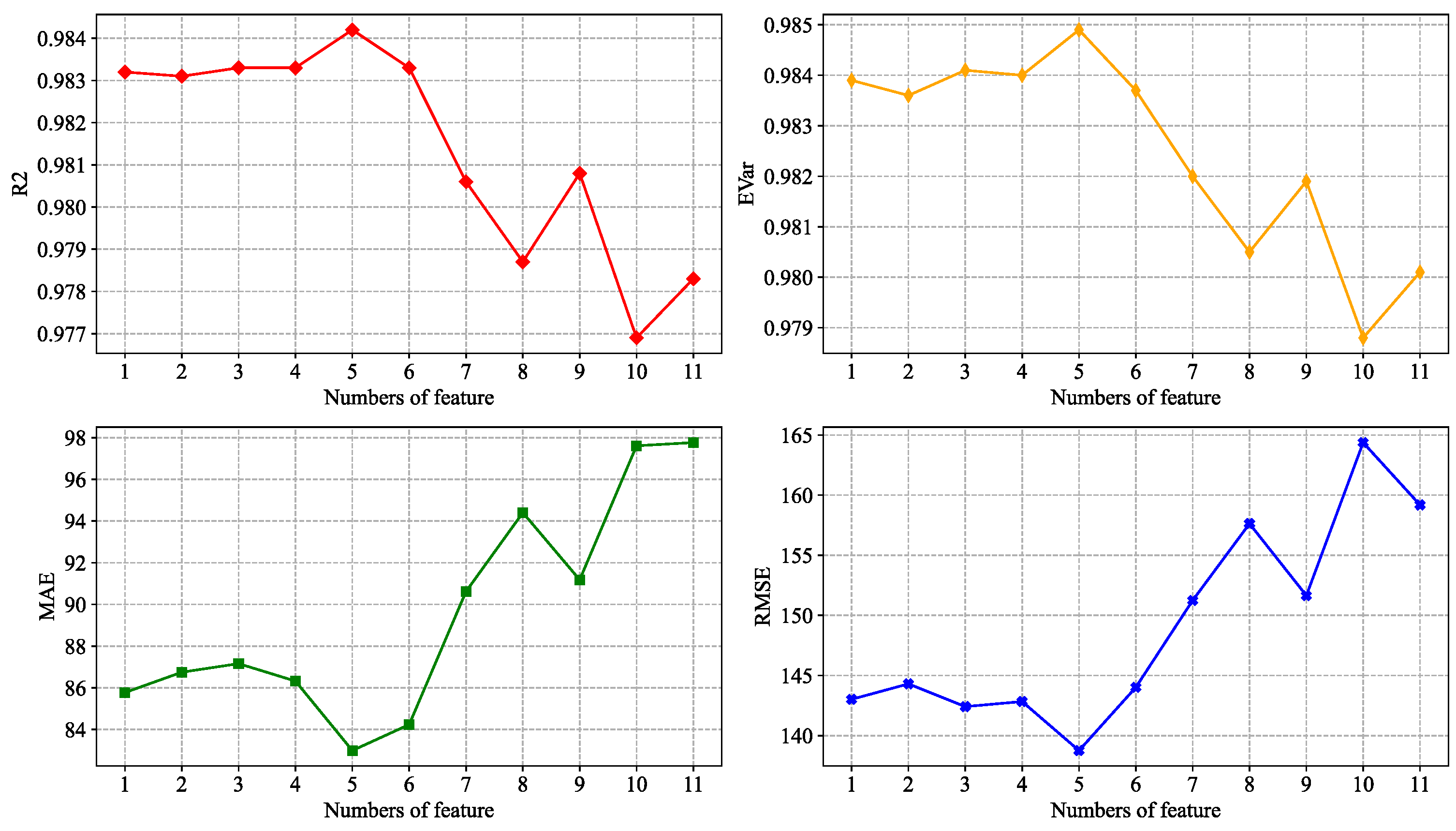
4.4. Variables Selection
- (1)
- Calculate the mutual information between the explanatory variable and the explained variable :where is the joint density function of the variables and . is the marginal probability density function of the explanatory variable , and is the marginal probability density function of the explanatory variable .
- (2)
- The variables and are divided into a grid of defined as . To obtain the grid division that maximizes the , the value of is normalized. This normalized maximum can be expressed as follows:where is the maximum of data set under grid .
- (3)
- The is defined as the maximum under all grids , calculated as follows:where is the maximum number of unit grids as a function of the number of samples.
4.5. Model Evaluation Methods
- (1)
- Coefficient of determination (R2)
- (2)
- Explainable Variance Score (EVar)
- (3)
- Mean Absolute Error (MAE)
- (4)
- Median Absolute Error (MedAE)
- (5)
- Root Mean Square Error (RMSE)
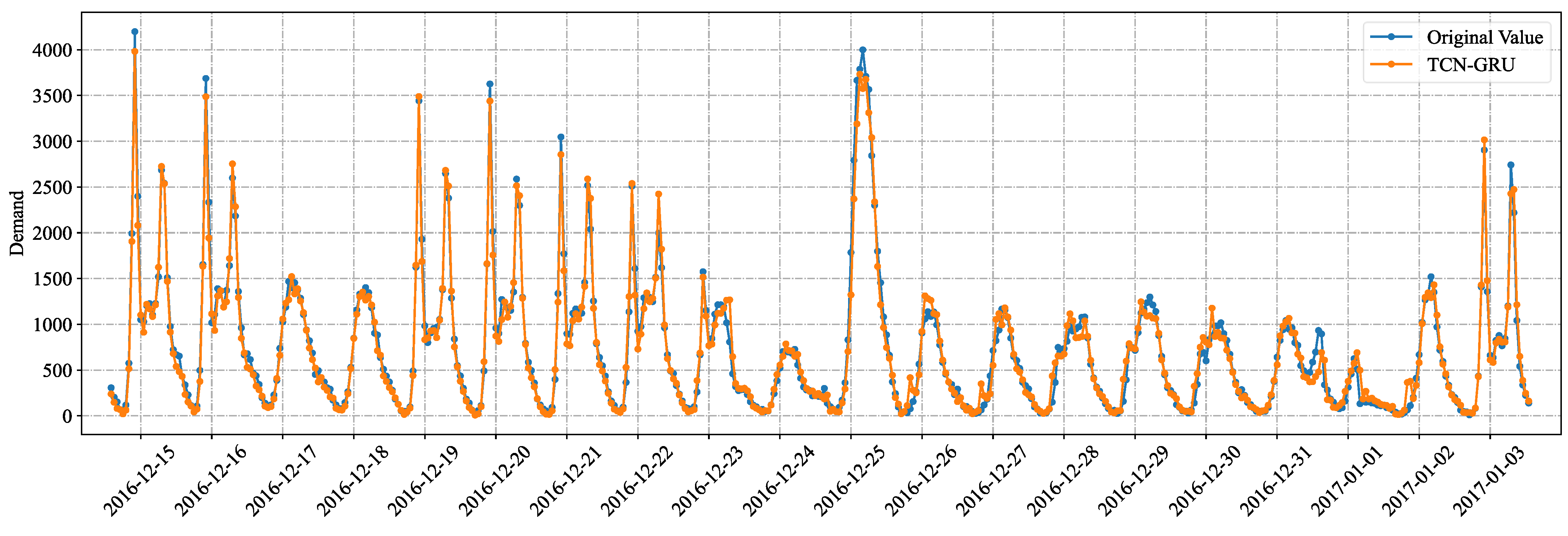
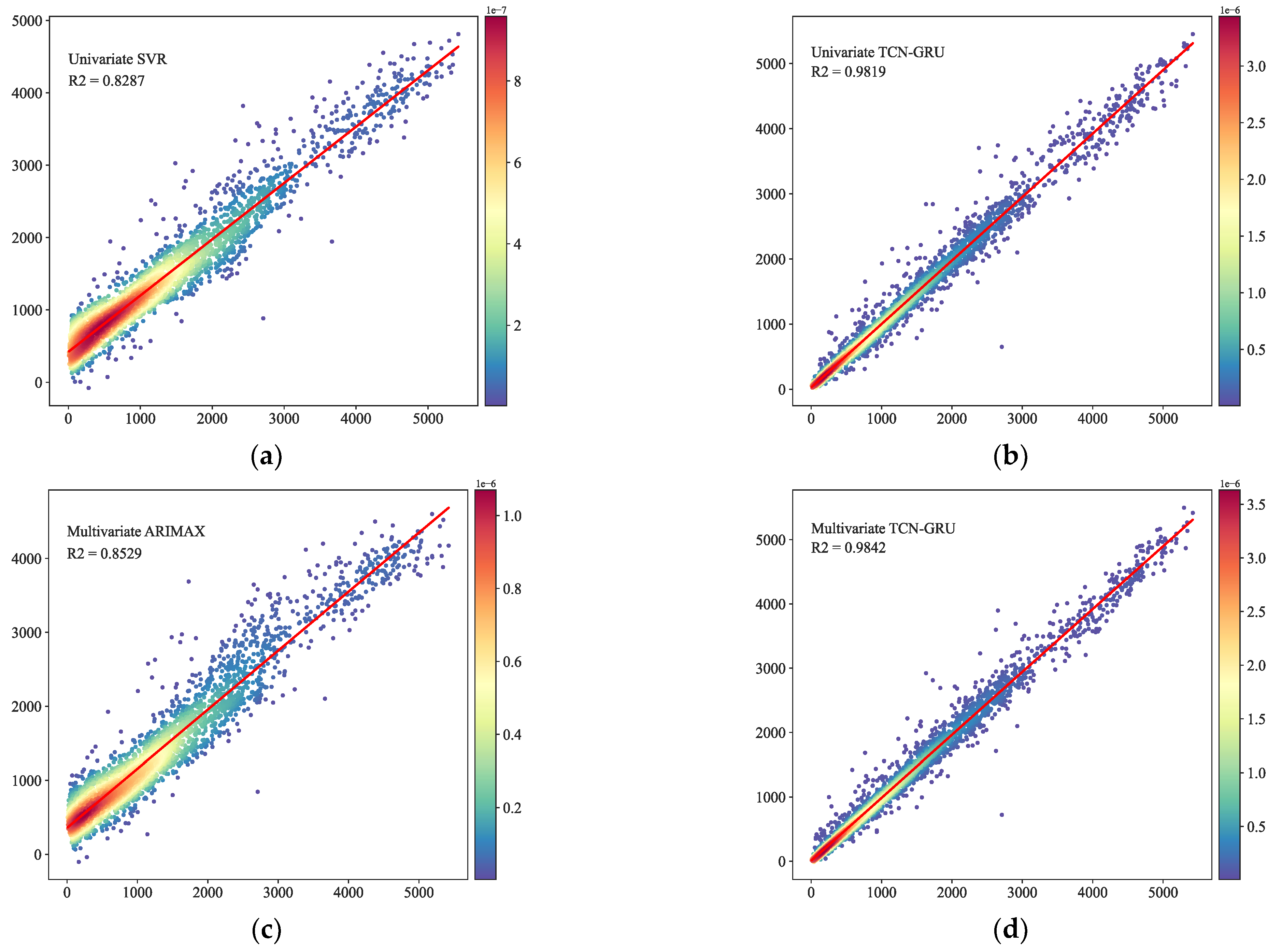
4.6. Verification Experiment and Result Analysis
- (1)
- Support Vector Regression (SVR) [51] (kernel = ‘rbf’, C = 1.0, max_iter = −1);
- (2)
- XGBoost [52] (max_depth = 6, learning_rate = 0.1, eta = 1);
- (3)
- ARIMA [53] (autocorrelation order: p = 9, difference order: d = 1, moving average orders: q = 0);
- (4)
- ARIMAX (autocorrelation order: p = 9, difference order: d = 1, moving average orders: q = 8, exogenous variables: hour, hum, t1, is_weekend, day_of_week);
- (5)
- LSTM (input_size = 6, hidden_size = 100, num_layers = 2, batch_size = 64, dropout = 0.2);
- (6)
- History Average Model (HA) (history time step = 13);
- (7)
- Prophet [54] (growth = “linear”, freq = ”H”, interval_width = 0.95);
- (8)
- DeepAR [55] (input_size = 6, hidden_size = 64, num_layers = 3).
5. Discussion
- (1)
- The combined model proposed in this paper showed good results in short-term bike-sharing demand prediction, and when we tried long-term prediction, the results were not satisfactory. Later, we will try to combine other models to improve performance in long-term prediction.
- (2)
- In this study, we used a small-scale parameter-tuning method based on a grid search, and subsequently we considered other optimization algorithms for parameter searching which might improve the performance of the model.
- (3)
- Due to limited data conditions, we were unable to obtain the main gathering locations of bike-sharing in the region, and thus could not extract spatial characteristics that could be used for further research following demand prediction.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, X.Y.; Jiang, Y.K.; Li, M.Y.; Ke, X.W. A study of public bicycle single-site scheduling demand based on BP neural network. Transp. Res. 2016, 3, 30–35. [Google Scholar] [CrossRef]
- Xu, C.; Yang, Y.; Jin, S.; Qu, Z.; Hou, L. Potential risk and its influencing factors for separated bicycle paths. Accid. Anal. Prev. 2016, 87, 59–67. [Google Scholar] [CrossRef]
- Campbell, A.A.; Cherry, C.R.; Ryerson, M.S.; Yang, X. Factors influencing the choice of shared bicycles and shared electric bikes in Beijing. Transp. Res. Part C Emerg. Technol. 2016, 67, 399–414. [Google Scholar] [CrossRef]
- Mattson, J.; Godavarthy, R. Bike share in Fargo, North Dakota: Keys to success and factors affecting ridership. Sustain. Cities Soc. 2017, 34, 174–182. [Google Scholar] [CrossRef]
- Faghih-Imani, A.; Eluru, N.; El-Geneidy, A.M.; Rabbat, M.; Haq, U. How land-use and urban form impact bicycle flows: Evidence from the bicycle-sharing system (BIXI) in Montreal. J. Transp. Geogr. 2014, 41, 306–314. [Google Scholar] [CrossRef]
- Nosal, T.; Miranda-Moreno, L.F. The effect of weather on the use of North American bicycle facilities: A multi-city analysis using automatic counts. Transp. Res. Part A Policy Pract. 2014, 66, 213–225. [Google Scholar] [CrossRef]
- Gebhart, K.; Noland, R.B. The impact of weather conditions on bikeshare trips in Washington, DC. Transportation 2014, 41, 1205–1225. [Google Scholar] [CrossRef]
- Faghih- Imani, A.; Hampshire, R.; Marla, L.; Eluru, N. An empirical analysis of bike sharing usage and rebalancing: Evidence from Barcelona and Seville. Transp. Res. Part A Policy Pract. 2017, 97, 177–191. [Google Scholar] [CrossRef]
- Rixey, R.A. Station-Level Forecasting of Bikesharing Ridership: Station Network Effects in Three, U.S. Systems. Transp. Res. Rec. 2013, 2387, 46–55. [Google Scholar] [CrossRef]
- Wang, X.; Lindsey, G.H.; Schoner, J.E.; Harrison, A. Modeling bike share station activity: Effects of nearby businesses and jobs on trips to and from stations. J. Urban Plan. Dev. 2016, 142, 04015001. [Google Scholar] [CrossRef] [Green Version]
- El-Assi, W.; Mahmoud, M.S.; Habib, K.N. Effects of built environment and weather on bike sharing demand: A station level analysis of commercial bike sharing in Toronto. Transportation 2017, 44, 589–613. [Google Scholar] [CrossRef]
- Fishman, E.; Washington, S.; Haworth, N.; Mazzei, A. Barriers to bike-sharing: An analysis from Melbourne and Brisbane. J. Transp. Geogr. 2014, 41, 325–337. [Google Scholar] [CrossRef]
- Cock, J. Bike share in small and medium-sized cities. In Proceedings of the Presentation at 2016 Transportation Research Board Tools of the Trade Conference, Washington, DC, USA, 12–14 September 2016. [Google Scholar]
- Li, Y.H.; Ma, Y. LSTM-based bicycle sharing demand prediction. Smart City 2019, 5, 1–4. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, Y.; Zhang, H.; Chen, L. Traffic prediction in a bike-sharing system. In Proceedings of the 23rd SIGSPATIAL International Conference on Advances in Geographic Information Systems (SIGSPATIAL ‘15), Seattle, WA, USA, 2–6 November 2015; Association for Computing Machinery: New York, NY, USA, 2015. Article 33. pp. 1–10. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, D.; Wang, L.; Yang, D.; Ma, X.; Li, S.; Wu, Z.; Pan, G.; Nguyen, T.-M.; Jakubowicz, J. Dynamic cluster-based over-demand prediction in bike sharing systems. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; ACM: New York, NY, USA, 2016; pp. 841–852. [Google Scholar] [CrossRef]
- Liu, X.N.; Wang, J.J.; Zhang, T.F. A Method of Bike Sharing Demand Forecasting. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Bach, Switzerland, 2014; Volume 587–589, pp. 1813–1816. [Google Scholar] [CrossRef]
- Kaltenbrunner, A.; Meza, R.; Grivolla, J.; Codina, J.; Banchs, R. Urban cycles and mobility patterns: Exploring and predicting trends in a bicycle-based public transport system. Pervasive Mob. Comput. 2010, 6, 455–466. [Google Scholar] [CrossRef]
- Yanping, L.; Wanfeng, D. Research on short-term forecasting method of urban public bicycle demand based on ARIMA model. J. Nanjing Norm. Univ. 2016, 16, 36–40. [Google Scholar]
- Xia, Y. Demand Prediction of Public Bicycle System Based on Station Clustering; Dalian University of Technology: Dalian, China, 2018. [Google Scholar]
- Zhou, Y.; Wang, L.; Zhong, R.; Tan, Y. A Markov Chain Based Demand Prediction Model for Stations in Bike Sharing Systems. Math. Probl. Eng. 2018, 2018, 1–8. [Google Scholar] [CrossRef]
- Wang, W. Forecasting Bike Rental Demand Using New York Citi Bike Data. Master’s Thesis, Dublin Institute of Technology, Dublin, Ireland, 2016. [Google Scholar]
- Froehlich, J.E.; Neumann, J.; Oliver, N. Sensing and predicting the pulse of the city through shared bicycling. In Proceedings of the Twenty-First International Joint Conference on Artificial Intelligence, Los Angeles, CA, USA, 12–17 July 2009; pp. 1420–1426. [Google Scholar]
- Hulot, P.; Aloise, D.; Jena, S.D. Towards Station-Level Demand Prediction for Effective Rebalancing in Bike-Sharing Systems. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining (KDD ‘18), London, UK, 19–23 August 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 378–386. [Google Scholar] [CrossRef]
- Liu, J.; Li, Q.; Qu, M.; Chen, W.; Yang, J.; Xiong, H.; Zhong, H.; Fu, Y. Station site optimization in bike sharing systems. In Proceedings of the 2015 IEEE International Conference on Data Mining, Atlantic City, NJ, USA, 14–17 November 2015; pp. 883–888. [Google Scholar] [CrossRef]
- Wang, B.; Kim, I. Short-term prediction for bike-sharing service using machine learning. Transp. Res. Procedia 2018, 34, 171–178. [Google Scholar] [CrossRef]
- Chen, P.; Hsieh, H.; Su, K.; Sigalingging, X.K.; Chen, Y.; Leu, J. Predicting station level demand in a bike-sharing system using recurrent neural networks. IET Intell. Transp. Syst. 2020, 14, 554–561. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, L.; Liu, Y.; Yang, X. Short-term prediction of bike-sharing usage considering public transport: A LSTM approach. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 1564–1571. [Google Scholar] [CrossRef]
- He, M.; Xue, X.; Zhang, X.; Zhou, C. A Bike-sharing Demand Predicting Model with Integrating Temporal Convolutional Network and Self-Attention. In Proceedings of the 2021 International Conference on Electronic Information Engineering and Computer Science (EIECS), Changchun, China, 23–26 September 2021; pp. 278–281. [Google Scholar] [CrossRef]
- Ma, X.; Yin, Y.; Jin, Y.; He, M.; Zhu, M. Short-Term Prediction of Bike-Sharing Demand Using Multi-Source Data: A Spatial-Temporal Graph Attentional LSTM Approach. Appl. Sci. 2022, 12, 1161. [Google Scholar] [CrossRef]
- Dastjerdi, A.M.; Morency, C. Bike-Sharing Demand Prediction at Community Level under COVID-19 Using Deep Learning. Sensors 2022, 22, 1060. [Google Scholar] [CrossRef]
- Chang, W.; Ji, X.; Wang, L.; Liu, H.; Zhang, Y.; Chen, B.; Zhou, S. A Machine-Learning Method of Predicting Vital Capacity Plateau Value for Ventilatory Pump Failure Based on Data Mining. Healthcare 2021, 9, 1306. [Google Scholar] [CrossRef]
- Zhou, S.; Chen, B.; Liu, H.; Ji, X.; Wei, C.; Chang, W.; Xiao, Y. Travel Characteristics Analysis and Traffic Prediction Modeling Based on Online Car-Hailing Operational Data Sets. Entropy 2021, 23, 1305. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, D.; Li, Q.; Yue, Y.; Tu, W.; Cao, R. Impacts of weather on public transport ridership: Results from mining data from different sources. Transp. Res. Part C Emerg. Technol. 2017, 75, 17–29. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H. Weather, travel mode choice, and impacts on subway ridership in Beijing. Transp. Res. Part A Policy Pract. 2020, 135, 264–279. [Google Scholar] [CrossRef]
- Zhao, P.; Li, S.; Li, P.; Liu, J.; Long, K. How does air pollution influence cycling behaviour? Evidence from Beijing. Transp. Res. Part D Transp. Environ. 2018, 63, 826–838. [Google Scholar] [CrossRef]
- Ren, W.J.; Han, M. A review of research on multivariate time series causality analysis. J. Autom. 2021, 47, 64–78. [Google Scholar] [CrossRef]
- Bai, S.; Kolter, J.Z.; Koltun, V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling [EB/OL]. arXiv 2018, arXiv:1803.01271. [Google Scholar]
- Zhou, D.; Li, Z.; Zhu, J.; Zhang, H.; Hou, L. State of health monitoring and remaining useful life prediction of lithium-ion batteries based on temporal convolutional network. IEEE Access 2020, 8, 53307–53320. [Google Scholar] [CrossRef]
- Wu, P.; Sun, J.; Chang, X.; Zhang, W.; Arcucci, R.; Guo, Y.; Pain, C.C. Data-driven reduced order model with temporal convolutional neural network. Comput. Methods Appl. Mech. Eng. 2020, 360, 112766–112778. [Google Scholar] [CrossRef]
- Oord, A.V.D.; Dieleman, S.; Zen, H.; Simonyan, K.; Vinyals, O.; Graves, A.; Kavukcuoglu, K. WaveNet: A generative model for raw audio [EB/OL]. arXiv 2016, arXiv:1609.03499. [Google Scholar]
- Wang, Y.; Yang, K.; Li, H. Industrial time-series modeling via adapted receptive field temporal convolution networks integrating regularly updated multi-region operations based on PCA. Chem. Eng. Sci. 2020, 228, 115956–115971. [Google Scholar] [CrossRef]
- Richardson, R.R.; Osborne, M.A.; Howey, D.A. Gaussian process regression for forecasting battery state of health. J. Power Sources 2017, 357, 209–219. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition [EB/OL]. arXiv 2015, arXiv:1512.03385. [Google Scholar]
- Borovykh, A.; Bohte, S.; Oosterlee, C.W. Conditional time series forecasting with convolutional neural networks [EB/OL]. arXiv 2017, arXiv:1703.04691. [Google Scholar]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Cho, K.; van Merrienboer, B.; Gülçehre, Ç.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations using RNN Encoder–Decoder for Statistical Machine Translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Gan, J.S.; Chen, G.L. Linear combinatorial prediction models and their applications. Comput. Sci. 2006, 9, 191–194. [Google Scholar]
- Reshef, D.N.; Reshef, Y.A.; Finucane, H.K.; Grossman, S.R.; McVean, G.; Turnbaugh, P.J.; Lander, E.S.; Mitzenmacher, M.; Sabeti, P.C. Detecting novel associations in large data sets. Science 2011, 334, 1518–1524. [Google Scholar] [CrossRef]
- Ham, T.J.; Wu, L.; Sundaram, N.; Satish, N.; Martonosi, M. Graphicionado: A high-performance and energy-efficient accelerator for graph analytics. In Proceedings of the IEEE ACM International Symposium on Microarchitecture, Taipei, Taiwan, 15–19 October 2016. [Google Scholar] [CrossRef]
- Vladimir, N. Vapnik. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 2000; pp. 138–167. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. Xgboost: A scalable tree boosting System. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar] [CrossRef]
- Box, G.E.P.; Jenkins, G.M. Time series analysis: Forecasting and control. J. Time 2010, 31, 303. [Google Scholar]
- Taylor, S.J.; Letham, B. Forecasting at Scale. Am. Stat. 2018, 72, 37–45. [Google Scholar] [CrossRef]
- Salinas, D.; Flunkert, V.; Gasthaus, J.; Januschowski, T. DeepAR: Probabilistic forecasting with autoregressive recurrent networks. Int. J. Forecast. 2020, 36, 1181–1191. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field Name | Description | Example |
|---|---|---|
| timestamp | Timestamp for grouping data together | 4 January 2015, 12:00 |
| demand | Counting of new bike share | 182 |
| t1 | Actual temperature (°C) | 3.0 |
| t2 | Subjective perception of temperature (°C) | 2.0 |
| hum | Humidity percentage (%) | 93.0 |
| wind_speed | Wind speed value (km/h) | 6.0 |
| weather_code | Sunny: 1, Less Cloudy: 2, Cloudy: 3, Overcast:4, Rainy: 7, Storms: 10, Snowy: 26 | 3 |
| is_holiday | Holiday: 1, Non-holiday: 0 | 0 |
| is_weekend | Weekend: 1, Non-weekend: 0 | 1 |
| season | Spring: 0; Summer: 1; Autumn: 2; Winter: 3 | 3 |
| hour | 24 h per day | 12 |
| day_of_month | Natural days per month | 1 |
| day_of_week | Monday: 0, …, Sunday: 6 | 1 |
| month | January: 1, …, December: 12 | 6 |
| Variable | Original Hypothesis | F-Statistic | |
|---|---|---|---|
| t1 | t1 is not a bike-sharing demand Granger reason | 230.8794 | 8.275 × 10−8 |
| hum | hum is not a bike-sharing demand Granger reason | 257.9023 | 1.296 × 10−9 |
| weather_code | windspeed is not a bike-sharing demand Granger reason | 20.1423 | 0.0728 |
| wind_speed | weather code is not a bike-sharing demand Granger reason | 5.1211 | 0.2036 |
| Parameter | Value |
|---|---|
| Time Steps | 13 |
| Nb_filters | 64 |
| Kernel_size | 3 |
| Nb_stacks | 1 |
| Epochs | 80 |
| Batch Size | 32 |
| Drop out | 0.2 |
| Dilations | [1, 2, 4, 8, 16, 32, 64] |
| Skip_connections | True |
| Kernel_initializer | he_normal |
| Optimizer | Adam |
| Activation Function | Rectified linear unit (ReLU) |
| Loss Function | Mean Squared Error (MSE) |
| Parameter | Value |
|---|---|
| Time Steps | 13 |
| Input Layer Units Number | 100 |
| Output Layer Units Number | 1 |
| Hide Layer Number | 2 |
| Hide Layer Units Number | 100 |
| Epochs | 50 |
| Batch Size | 16 |
| Learning Rate | 0.001 |
| Optimizer | Adam |
| Metrics | R2 | EVar | MedAE | MAE | RMSE | |
|---|---|---|---|---|---|---|
| Model | ||||||
| Univariate | HA | 0.4859 | 0.5234 | 457.8242 | 618.9324 | 864.8123 |
| Prophet | 0.5971 | 0.6616 | 428.9174 | 504.2642 | 716.3489 | |
| SVR | 0.8287 | 0.8892 | 381.6209 | 308.4608 | 375.5922 | |
| ARIMA | 0.8379 | 0.8919 | 257.3966 | 297.9913 | 370.8495 | |
| XGBoost | 0.9657 | 0.9669 | 383.0468 | 111.5021 | 205.4212 | |
| LSTM | 0.9730 | 0.9748 | 315.4528 | 112.4182 | 178.9126 | |
| GRU | 0.9767 | 0.9769 | 312.3578 | 112.8749 | 171.3778 | |
| TCN | 0.9806 | 0.9813 | 288.7231 | 89.8644 | 154.1625 | |
| TCN-LSTM | 0.9808 | 0.9817 | 50.5265 | 90.0193 | 152.5853 | |
| TCN-GRU | 0.9819 | 0.9825 | 52.1868 | 90.0910 | 149.3043 | |
| Multivariate | DeepAR | 0.7278 | 0.7861 | 401.2352 | 456.8923 | 613.7432 |
| ARIMAX | 0.8529 | 0.8990 | 250.8287 | 285.9122 | 358.4603 | |
| TCN | 0.9829 | 0.9837 | 49.1962 | 86.2586 | 143.8991 | |
| GRU | 0.9817 | 0.9813 | 72.7963 | 104.2761 | 154.4806 | |
| LSTM | 0.9799 | 0.9807 | 61.567 | 98.7257 | 156.6573 | |
| TCN-LSTM | 0.9833 | 0.9841 | 48.1795 | 84.6395 | 142.0784 | |
| TCN-GRU | 0.9842 | 0.9849 | 47.7591 | 82.9933 | 138.7543 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Song, C.; Wang, T.; Pan, X.; Chang, W.; Yang, L. A Short-Term Hybrid TCN-GRU Prediction Model of Bike-Sharing Demand Based on Travel Characteristics Mining. Entropy 2022, 24, 1193. https://0-doi-org.brum.beds.ac.uk/10.3390/e24091193
Zhou S, Song C, Wang T, Pan X, Chang W, Yang L. A Short-Term Hybrid TCN-GRU Prediction Model of Bike-Sharing Demand Based on Travel Characteristics Mining. Entropy. 2022; 24(9):1193. https://0-doi-org.brum.beds.ac.uk/10.3390/e24091193
Chicago/Turabian StyleZhou, Shenghan, Chaofei Song, Tianhuai Wang, Xing Pan, Wenbing Chang, and Linchao Yang. 2022. "A Short-Term Hybrid TCN-GRU Prediction Model of Bike-Sharing Demand Based on Travel Characteristics Mining" Entropy 24, no. 9: 1193. https://0-doi-org.brum.beds.ac.uk/10.3390/e24091193