
Hardware Design and Implementation of a Wavelet De-Noising Procedure for Medical Signal Preprocessing


Abstract
:1. Introduction
2. Methodology
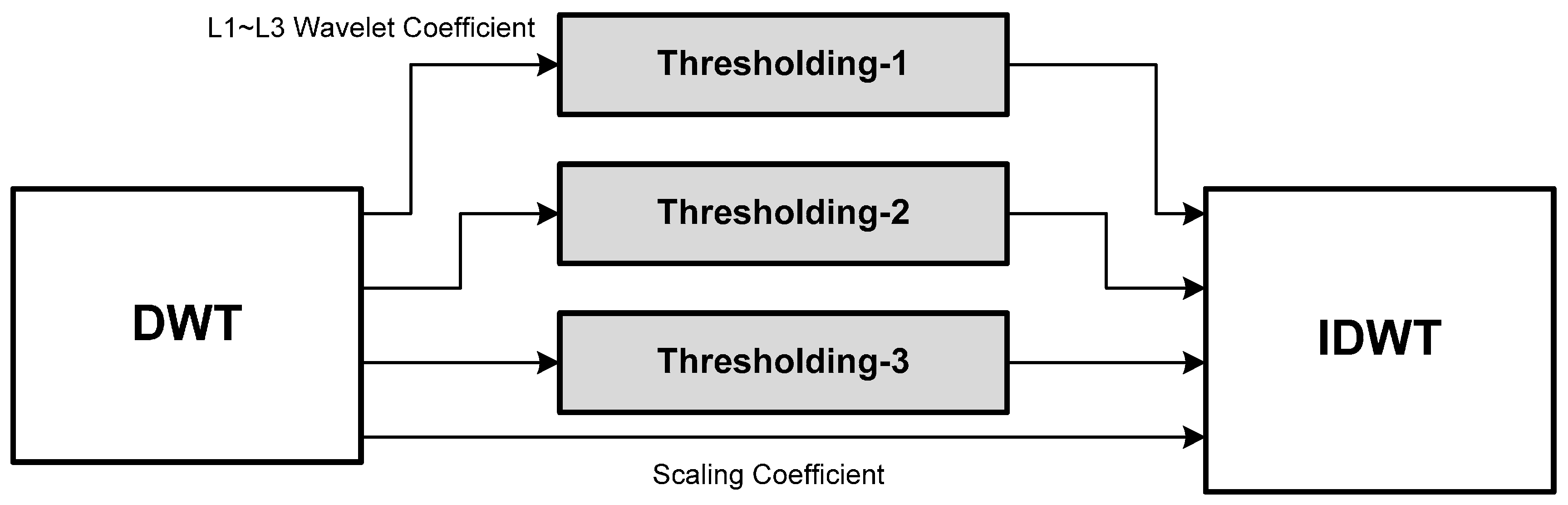
2.1. Overall Structure

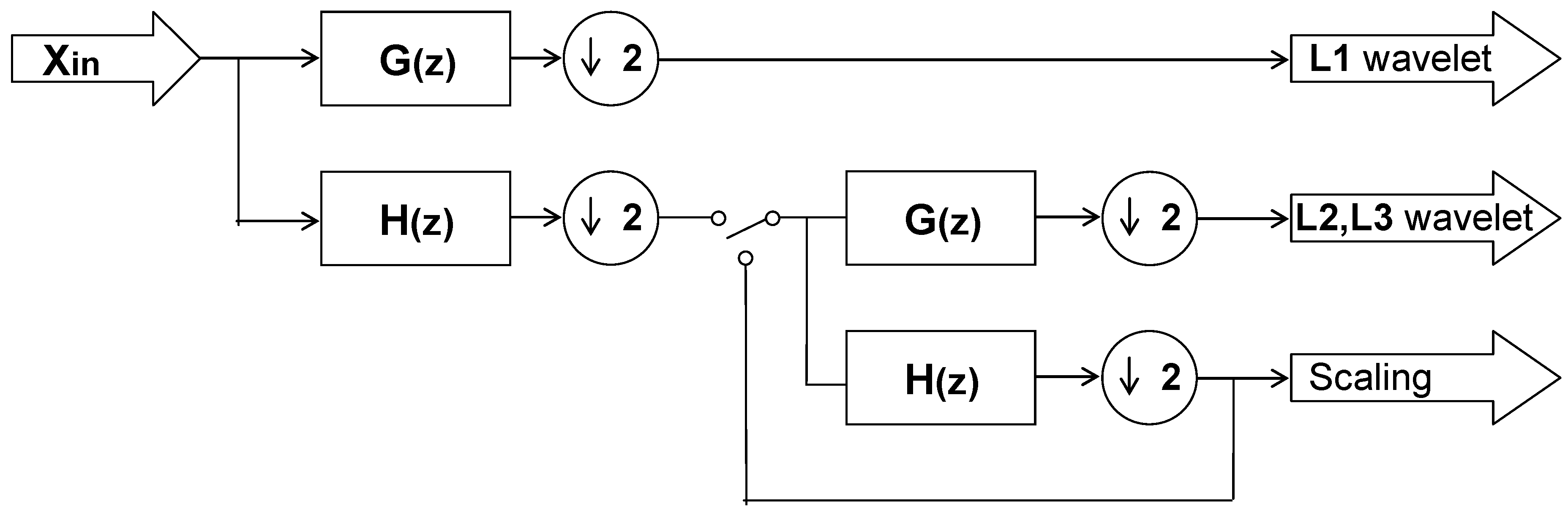
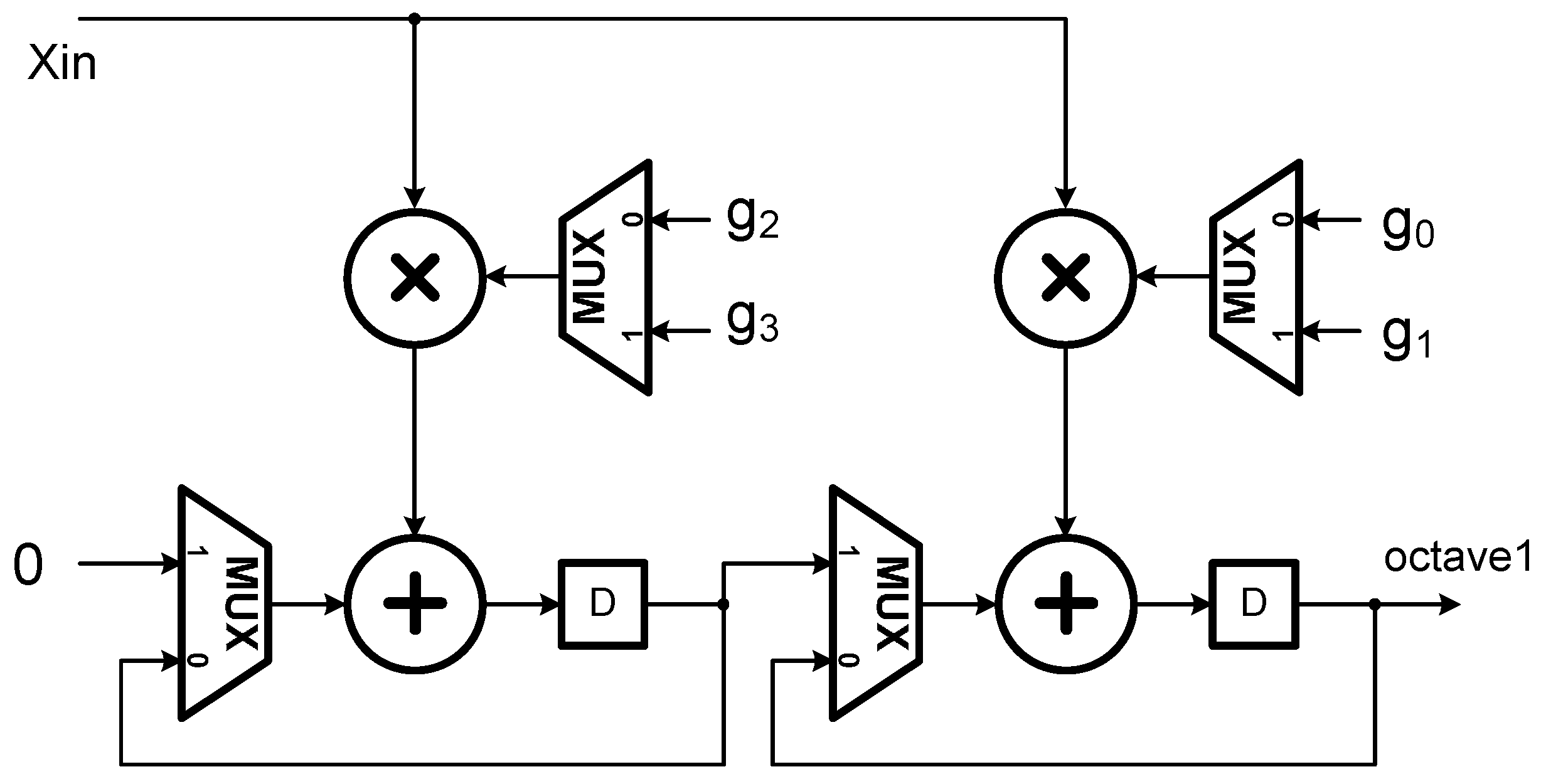
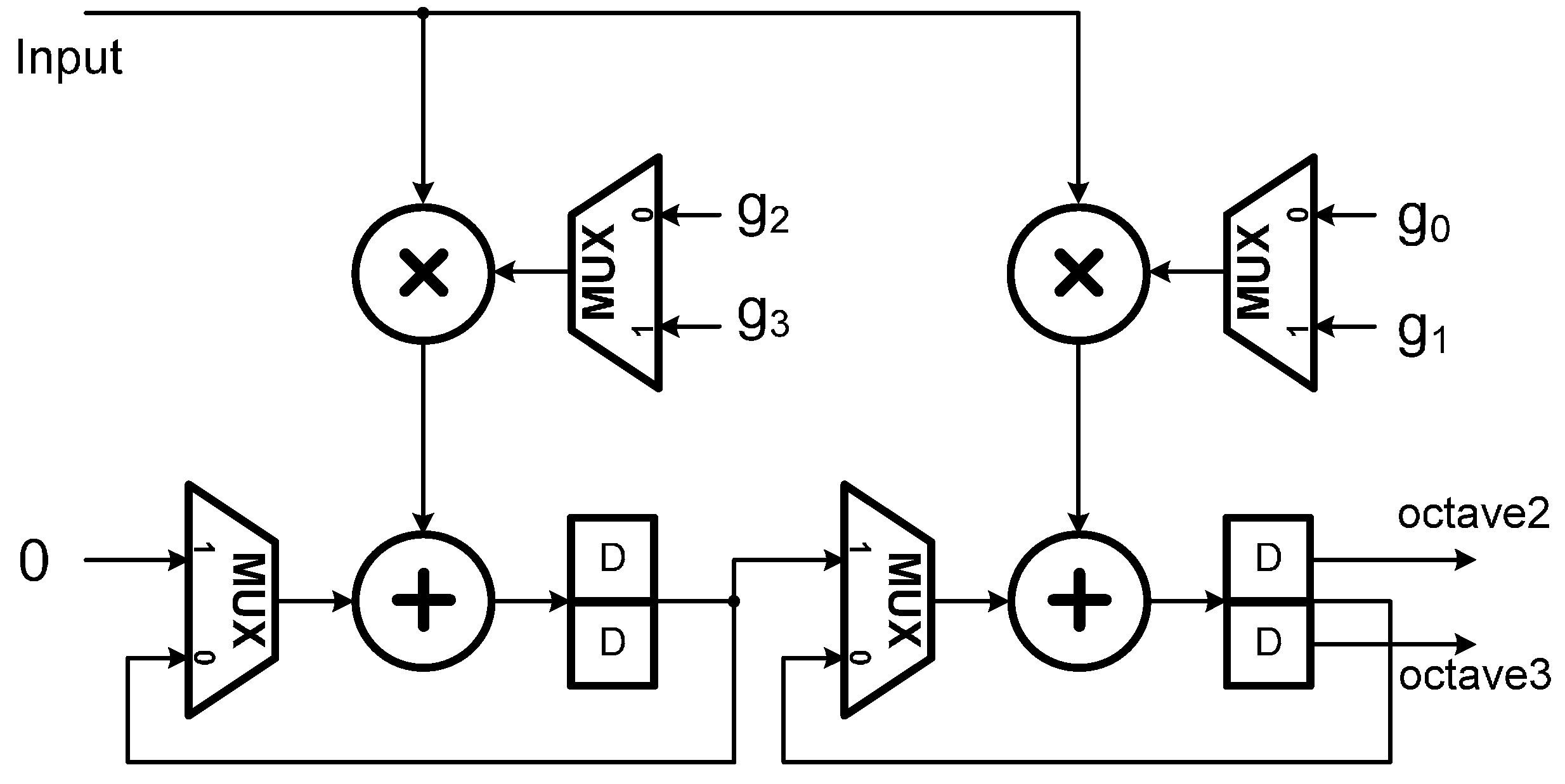
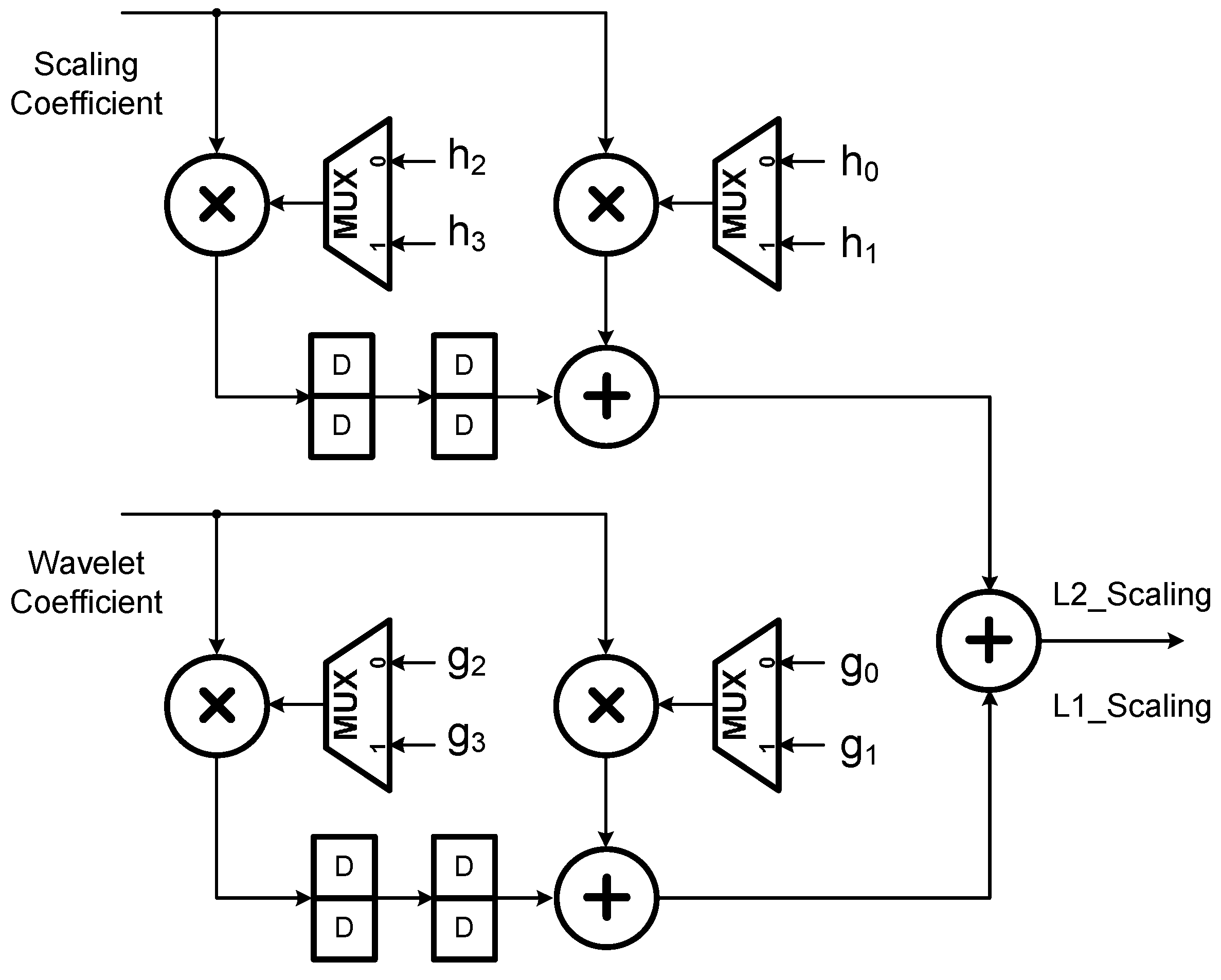
2.2. First Stage: DWT



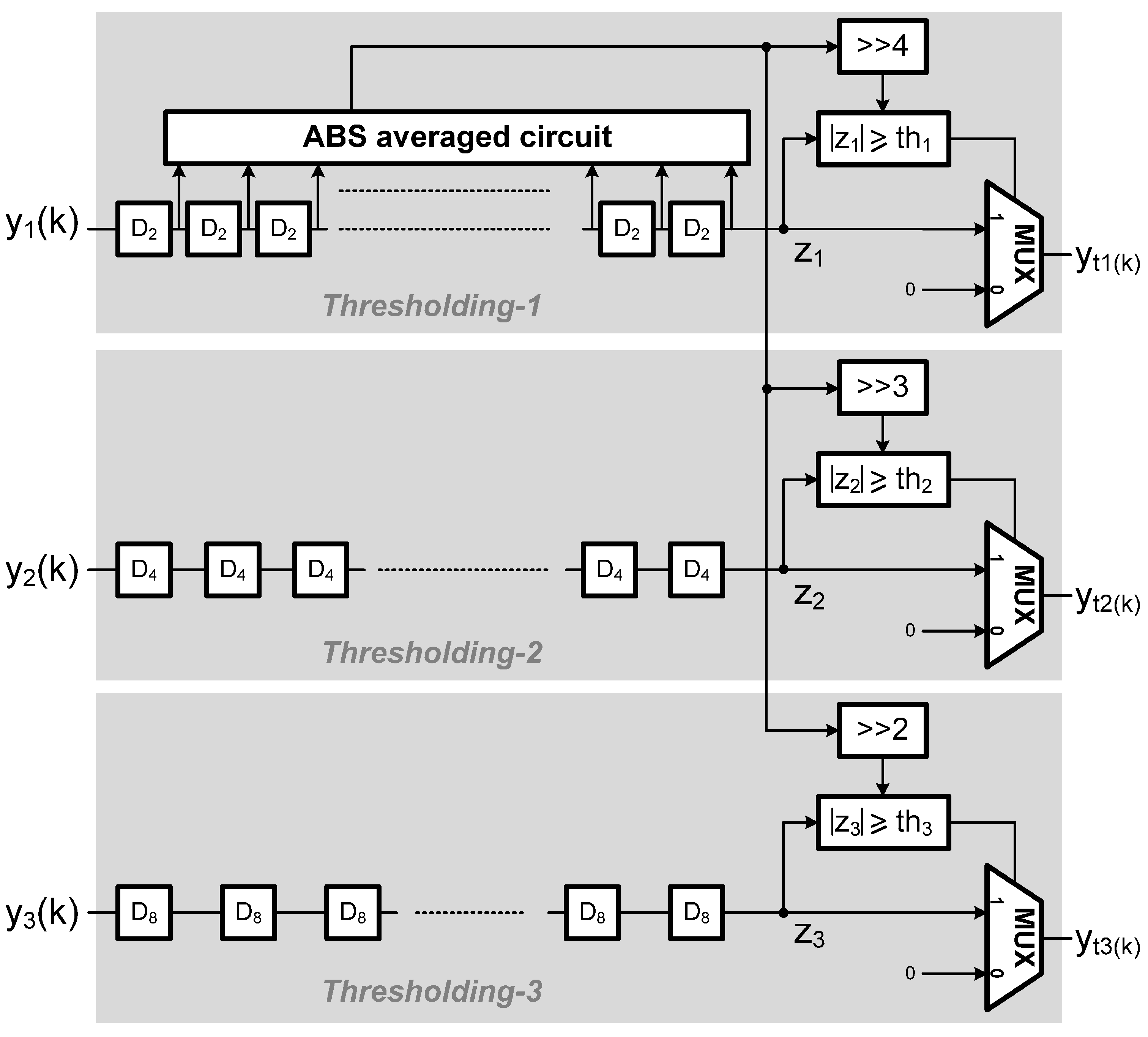
2.3. Middle Stage: Thresholding

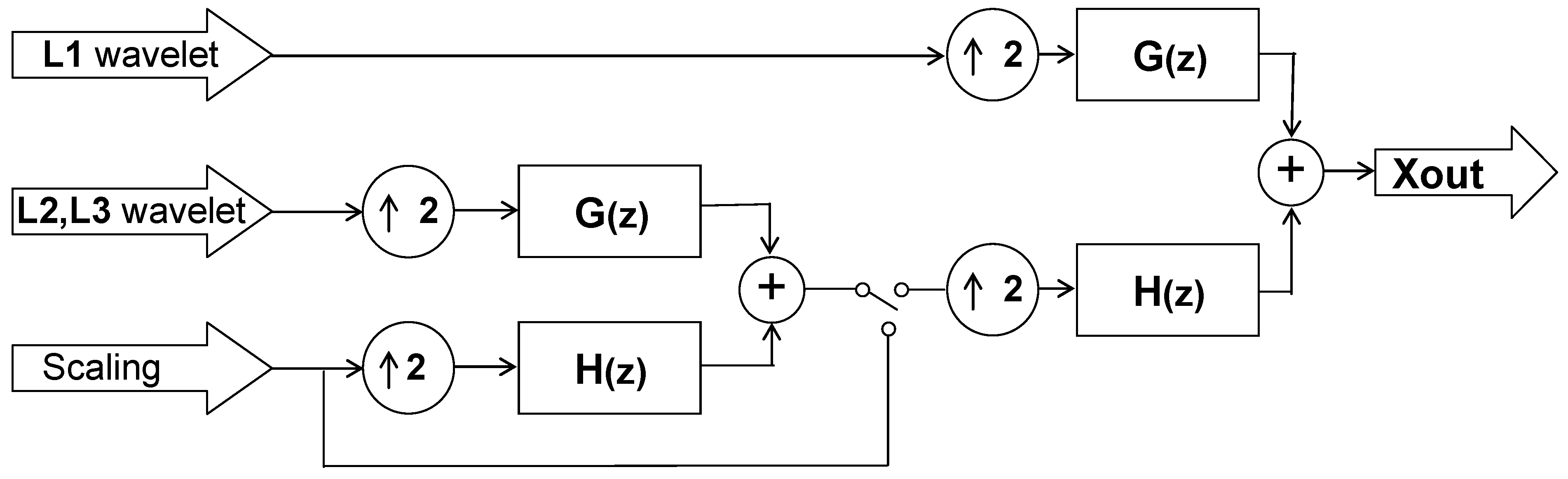
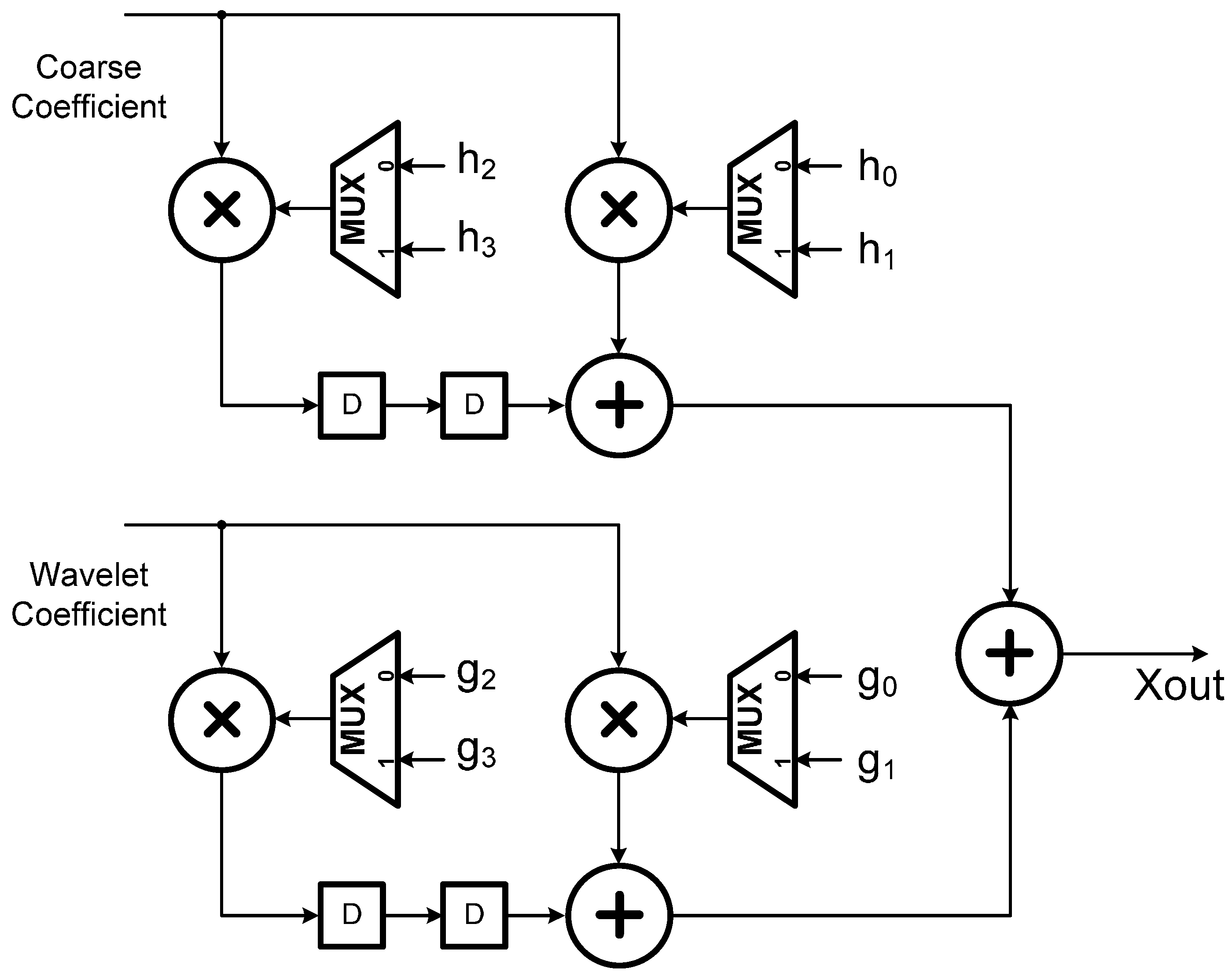
2.4. Final Stage: IDWT




3. Simulation Experiment Results of Performance Evaluation and FPGA Implementation
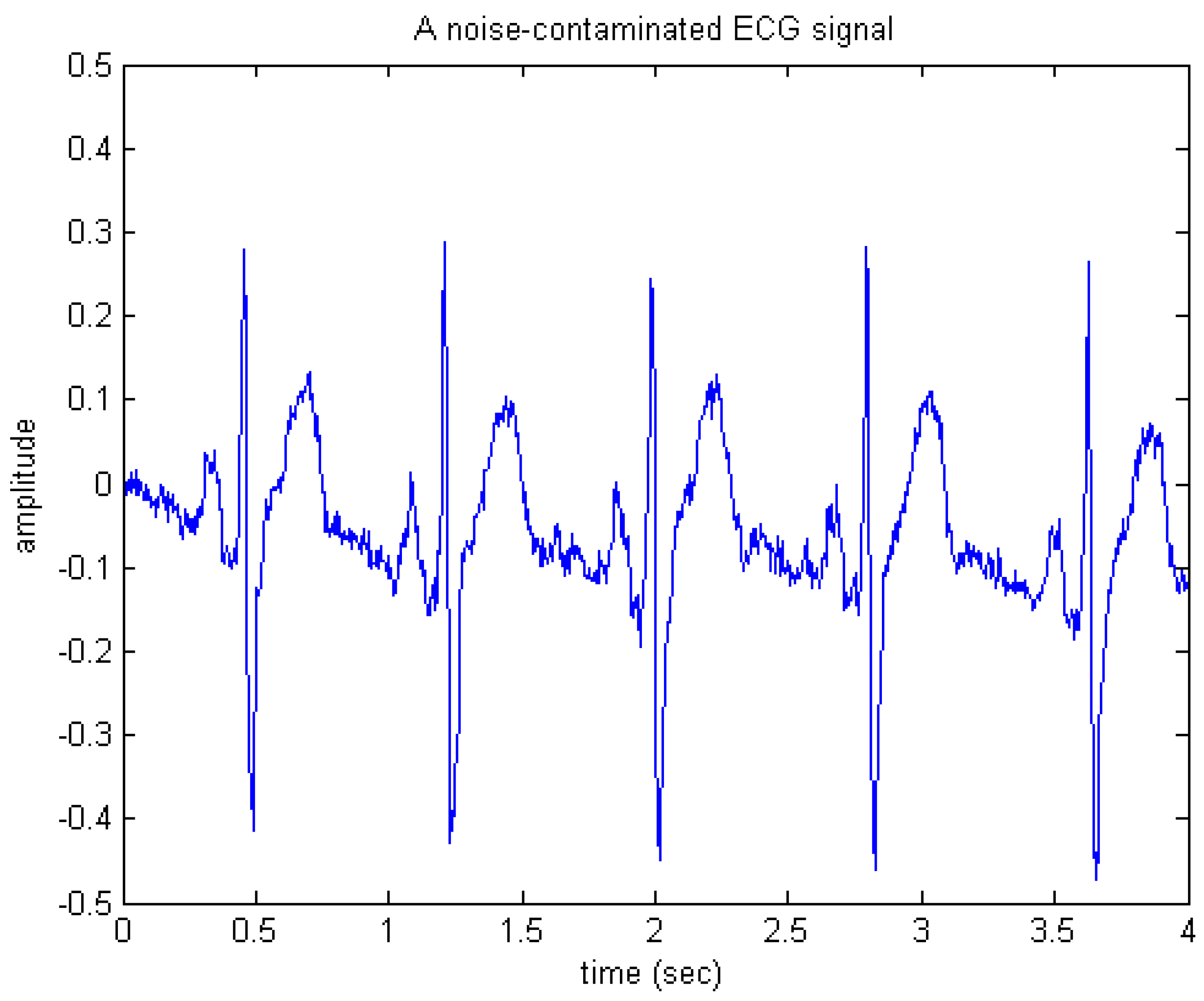
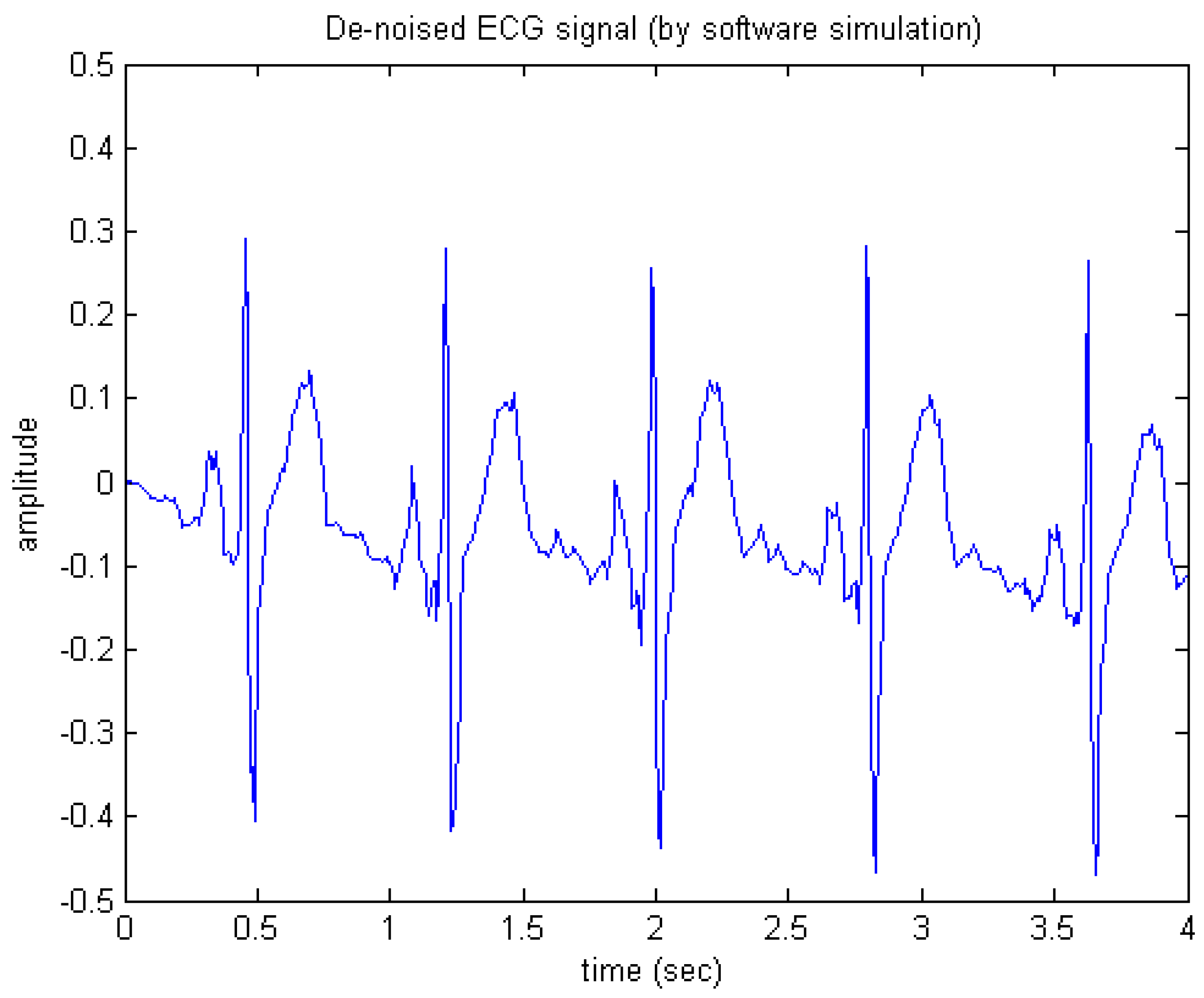
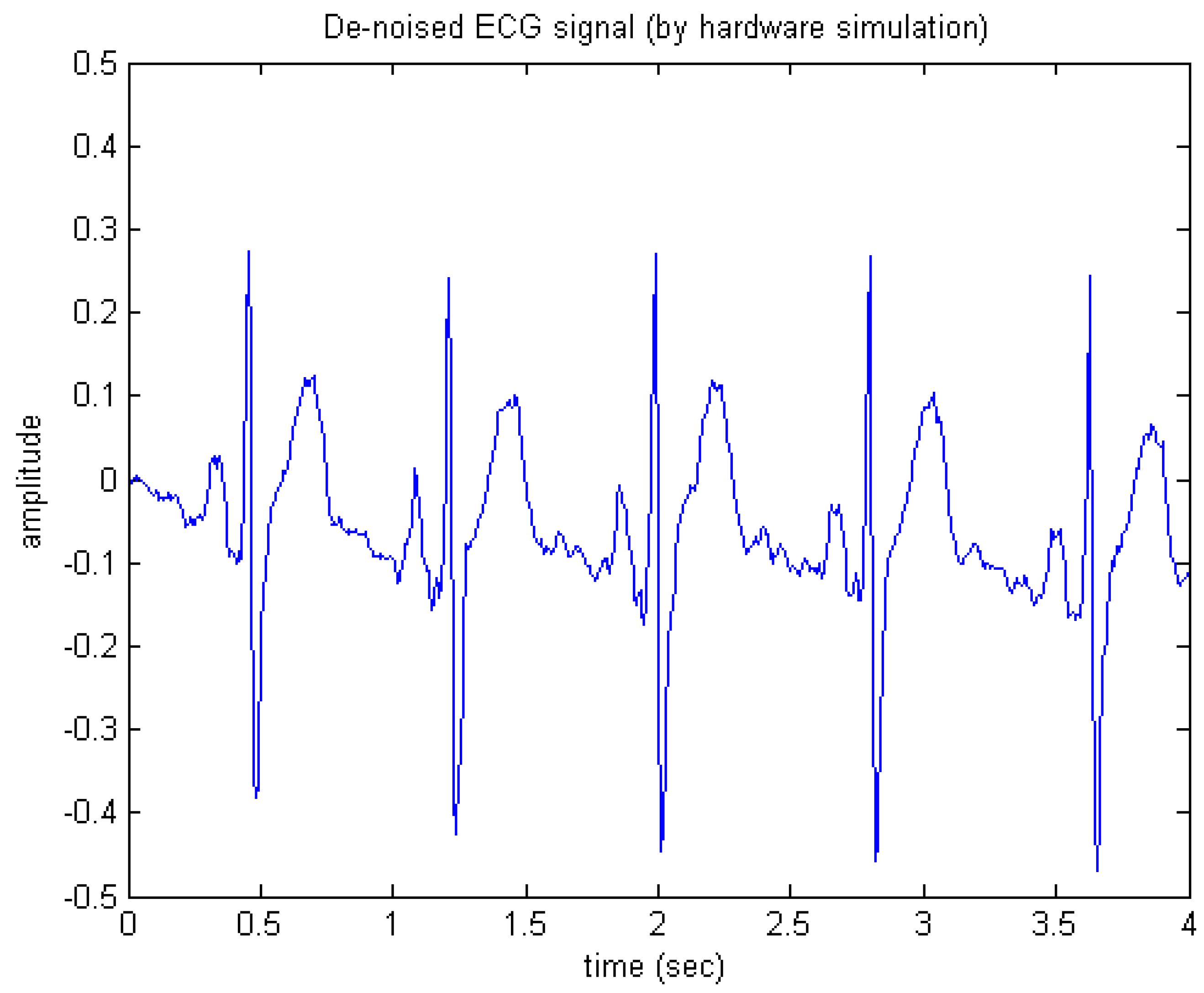
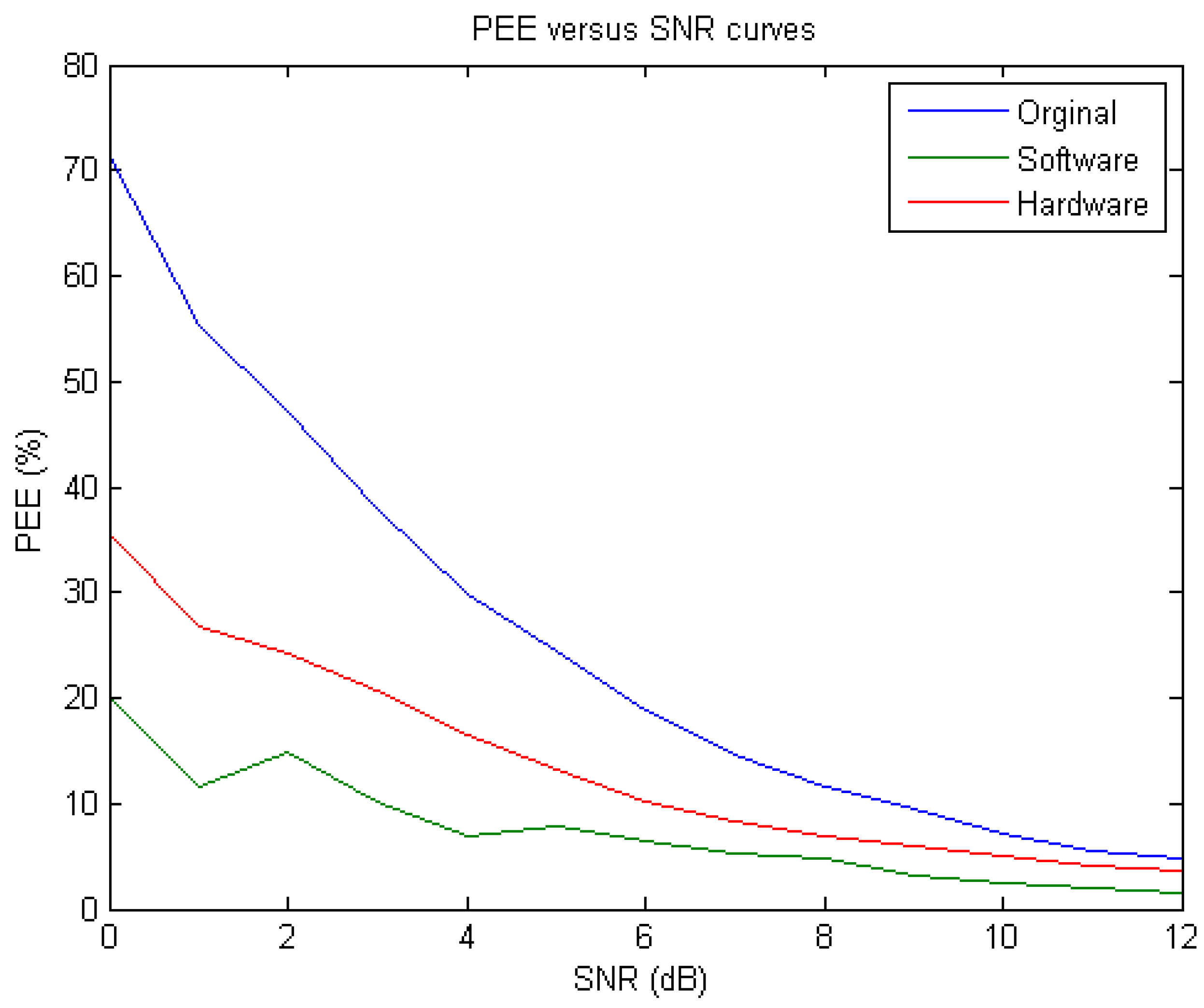
3.1. Simulation Results of White Gaussian Noise Reduction



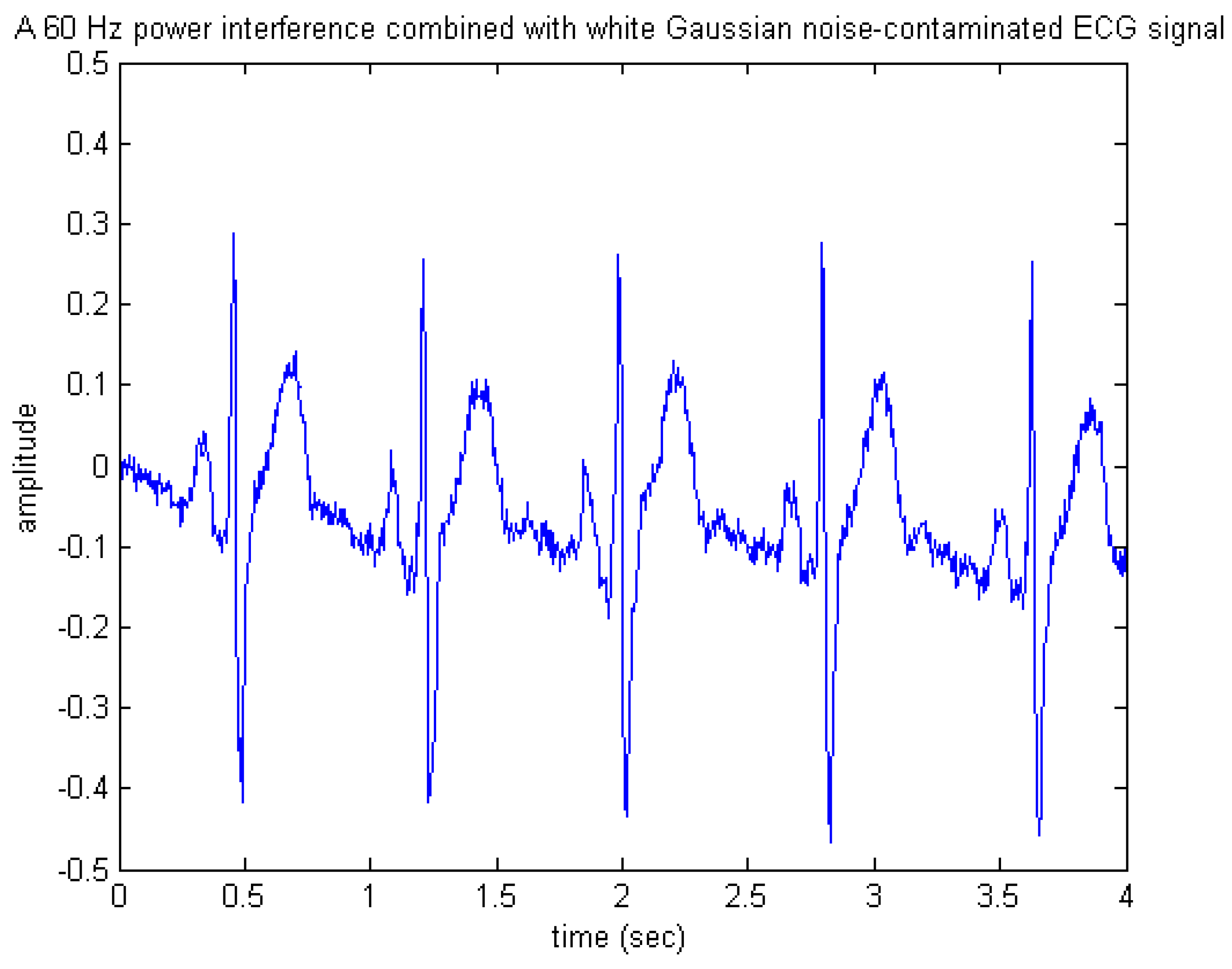
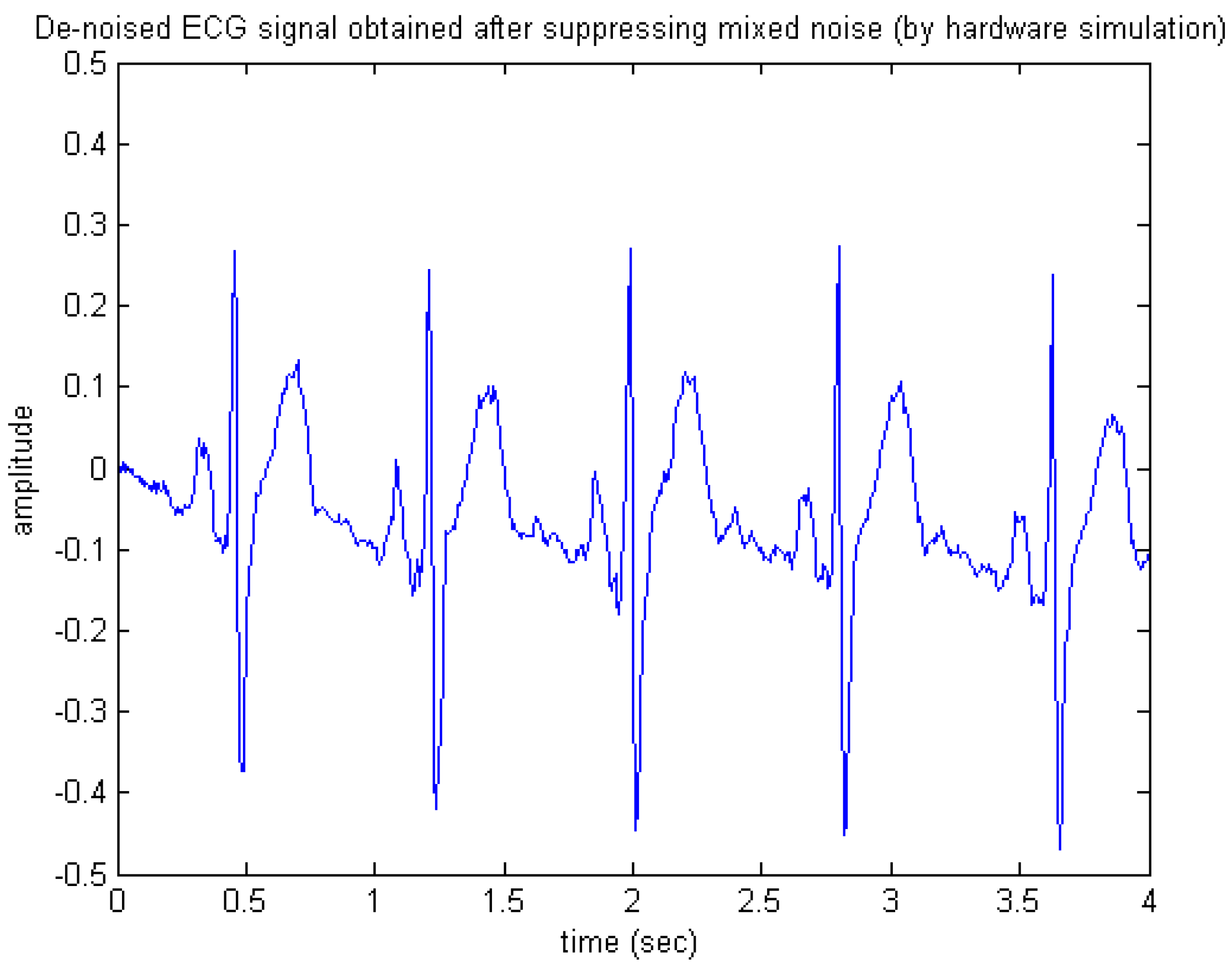
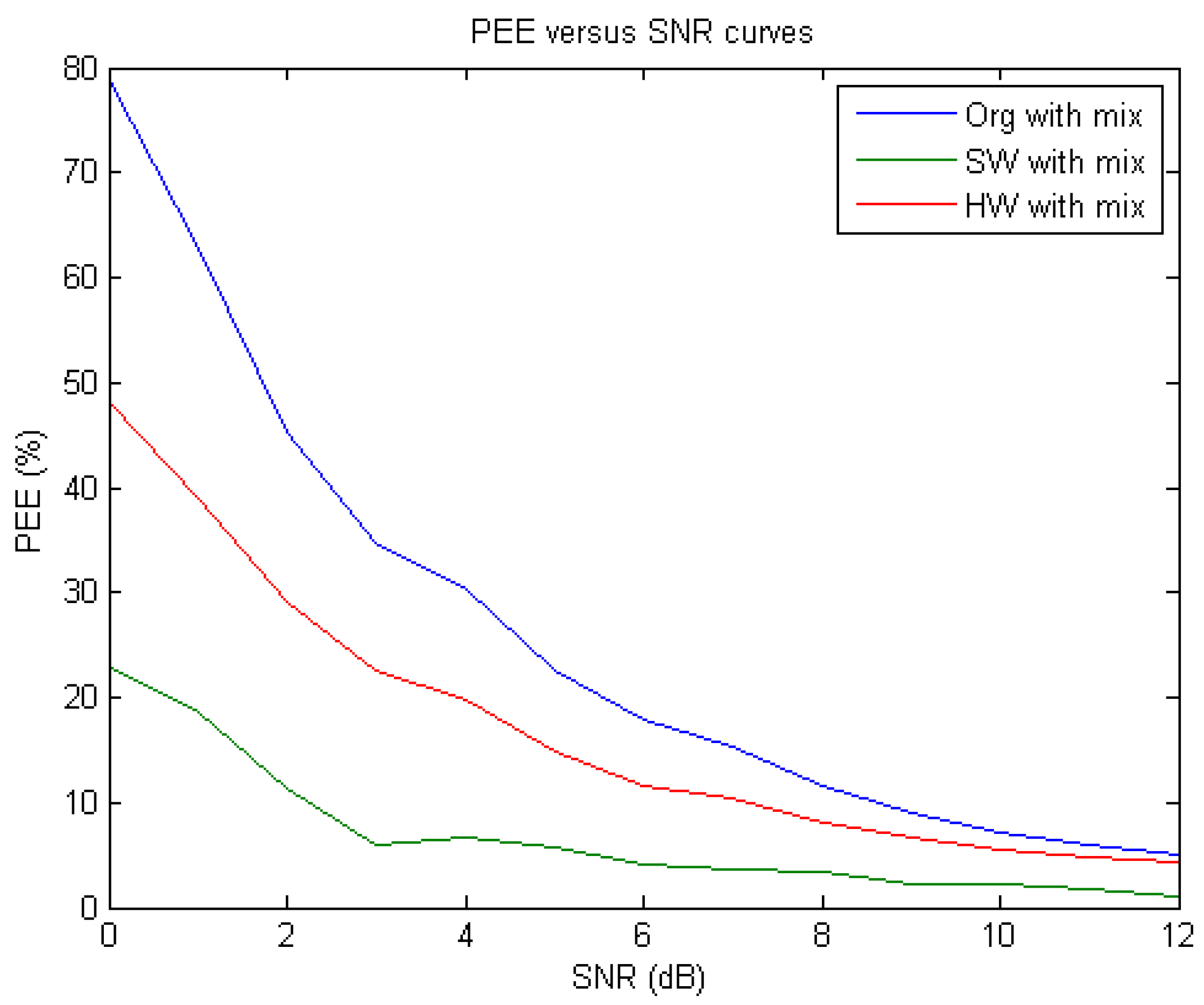
3.2. Simulation Results of 60 Hz Power Interference Mixed with Gaussian Noise Reduction



3.3. Performance Evaluation and Discussion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR (dB) | PEE (%) | ||
|---|---|---|---|
| Before De-Noising | After De-Noising (SW) | After De-Noising (HW) | |
| 0 | 71.4768 | 20.2165 | 35.4926 |
| 1 | 55.3751 | 11.5416 | 26.8590 |
| 2 | 47.1088 | 14.7589 | 24.1877 |
| 3 | 38.1031 | 10.2151 | 20.6781 |
| 4 | 29.8481 | 6.8174 | 16.5251 |
| 5 | 24.3355 | 7.8158 | 13.1456 |
| 6 | 18.9428 | 6.4032 (PRD ≒ 25%) | 10.2769 (PRD ≒ 32%) |
| 7 | 14.6350 | 5.1588 | 8.2892 |
| 8 | 11.5079 | 4.8156 | 6.9530 |
| 9 | 9.4788 | 3.0588 | 5.9702 |
| 10 | 7.1918 | 2.3661 (PRD ≒ 15%) | 4.9530 (PRD ≒ 22%) |
| 11 | 5.5625 | 1.9624 | 4.0578 |
| 12 | 4.8982 | 1.5295 | 3.7200 |

| SNR (dB) | PEE (%) | ||
|---|---|---|---|
| Before De-Noising | After De-Noising (SW) | After De-Noising (HW) | |
| 0 | 78.8927 | 22.9218 | 48.1399 |
| 1 | 62.8969 | 18.7075 | 38.8732 |
| 2 | 45.1561 | 11.3090 | 29.0159 |
| 3 | 34.6861 | 5.9853 | 22.6072 |
| 4 | 30.2524 | 6.6459 | 19.8421 |
| 5 | 22.4941 | 5.7056 | 14.7440 |
| 6 | 17.8927 | 3.9962 (PRD ≒ 20%) | 11.6299 (PRD ≒ 34%) |
| 7 | 15.4273 | 3.5649 | 10.4252 |
| 8 | 11.5474 | 3.4916 | 8.0020 |
| 9 | 8.8930 | 2.1120 | 6.6262 |
| 10 | 7.2446 | 2.1843 (PRD ≒ 15%) | 5.5503 (PRD ≒ 24%) |
| 11 | 6.0442 | 1.7293 | 4.7493 |
| 12 | 5.0159 | 1.0922 | 4.2236 |

| Performance Characteristics | |
|---|---|
| Technology | 40 nm |
| Supply Voltage | 1.2 V |
| Circuit Area | 25,082 μm2 |
| Frequency | 200 MHz |
| Power Consumption | 17.4 mW |
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, S.W.; Chen, H.C.; Chan, H.L. A real-time QRS detection method based on moving-averaging incorporating with wavelet denoising. Comput. Meth. Progr. Biomed. 2006, 82, 187–195. [Google Scholar] [CrossRef] [PubMed]
- Bartolo, A.; Clymer, B.D.; Burgess, R.C.; Turnbull, J.P.; Golish, J.A.; Perry, M.C. An arrhythmia detector and heart rate estimator for overnight polysomnography studies. IEEE Trans. Biomed. Eng. 2001, 48, 513–521. [Google Scholar] [CrossRef] [PubMed]
- Supuk, T.G.; Skelin, A.K.; Cic, M. Design, development and testing of a low-cost sEMG system and its use in recording muscle activity in human gait. Sensors 2014, 14, 8235–8258. [Google Scholar] [CrossRef] [PubMed]
- Akay, M. Introduction: Wavelet Transforms in Biomedical Engineering. Ann. Biomed. Eng. 1995, 23, 529–530. [Google Scholar] [CrossRef] [PubMed]
- Akay, M. Wavelets in biomedical engineering. Ann. Biomed. Eng. 1995, 23, 531–542. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.W. A wavelet-based heart rate variability analysis for the study of nonsustained ventricular tachycardia. IEEE Trans. Biomed. Eng. 2002, 49, 736–742. [Google Scholar] [CrossRef] [PubMed]
- Lu, Z.; Kim, D.Y.; Pearlman, W.A. Wavelet compression of ECG signals by the set partitioning in hierarchical trees algorithm. IEEE Trans. Biomed. Eng. 2000, 47, 849–856. [Google Scholar] [PubMed]
- Said, A.; Pearlman, W.A. A new, fast and efficient image codec based on set partitioning in hierarchical trees. IEEE Trans. Circuits. Syst. Video Technol. 1996, 6, 243–250. [Google Scholar] [CrossRef]
- Villarejo, M.V.; Zapirain, B.G.; Zorrilla, A.M. Algorithms based on CWT and classifiers to control cardiac alterations and stress using an ECG and a SCR. Sensors 2013, 13, 6141–6170. [Google Scholar] [CrossRef] [PubMed]
- Scapaticci, R.; Kosmas, P.; Crocco, L. Wavelet-based regularization for robust microwave imaging in medical applications. IEEE Trans. Biomed. Eng. 2015, 62, 1195–1202. [Google Scholar] [CrossRef] [PubMed]
- Rabbani, H.; Nezafat, R.; Gazor, S. Wavelet-domain medical image denoising using bivariate laplacian mixture model. IEEE Trans. Biomed. Eng. 2009, 56, 2826–2837. [Google Scholar] [CrossRef] [PubMed]
- Asfour, H.; Swift, L.M.; Sarvazyan, N.; Doroslovački, M.; Kay, M.W. Signal decomposition of transmembrane voltage-sensitive dye fluorescence using a multiresolution wavelet analysis. IEEE Trans. Biomed. Eng. 2011, 58, 2083–2093. [Google Scholar] [CrossRef] [PubMed]
- Donoho, D.L.; Johnstone, I.M. Ideal spatial adaptation by wavelet shrinkage. Biometrika 1994, 81, 425–455. [Google Scholar] [CrossRef]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Du, L.; Zhuang, Y.; Wu, Y. 1/fγ Noise separated from white noise with wavelet denoising. Microelectron. Reliab. 2002, 42, 183–188. [Google Scholar] [CrossRef]
- Ahsan, M.R.; Ibrahimy, M.I.; Khalifa, O.O. VHDL modelling of fixed-point DWT for the purpose of EMG signal denoising. In Proceedings of the Third International Conference on Computational Intelligence, Communication Systems and Networks (CICSyN), Bali, Indonesia, 26–28 July 2011.
- Elbuni, A.; Kanoun, S.; Elbuni, M.; Ali, N. ECG parameter extraction algorithm using (DWTAE) algorithm. In Proceedings of the International Conference on Computer Engineering & Systems, Cairo, Egypt, 14–16 December 2009.
- Hossain Mishu, M.M.; Aowlad Hossain, A.B.M.; Ahmed Emon, M.E. Denoising of ECG signals using dual tree complex wavelet transform. In Proceedings of the 17th International Conference on Computer and Information Technology, Dhaka, Bangladesh, 22–23 December 2014.
- Mallat, S.G. Multifrequency channel decompositions of images and wavelet models. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 2091–2110. [Google Scholar] [CrossRef]
- Mallat, S.G. A theory for multiresolution signal decomposition: the wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Yu, C.; Hsieh, C.A.; Chen, S.J. Design and implementation of a highly efficient VLSI architecture for discrete wavelet transform. In Proceedings of the IEEE Custom Integrated Circuits Conference, Santa Clara, CA, USA, 5–8 May 1997.
- Vishwanath, M. The recursive pyramid algorithm for the discrete wavelet transform. IEEE Trans. Signal Process. 1994, 42, 673–676. [Google Scholar] [CrossRef]
- Vishwanath, M.; Owens, R.M.; Irwin, M.J. VLSI architecture for the discrete wavelet transform. IEEE Trans. Circuits Syst. II Analog. Digit. Signal Process. 1995, 42, 305–316. [Google Scholar] [CrossRef]
- Darji, A.D.; Chandorkar, A.N.; Merchant, S.N. Memory efficient and low power VLSI architecture for 2-D lifting based DWT with dual data scan technique. Recent Res. Circuits Syst. Signal Process. 2011, 1, 62–67. [Google Scholar]
- Mansouri, A.; Ahaitouf, A.; Abdi, F. An efficient VLSI architecture and FPGA implementation of high-speed and low power 2-D DWT for (9,7) wavelet filter. Int. J. Comput. Sci. Netw. Secur. 2009, 9, 50–60. [Google Scholar]
- Parhi, K.K. VLSI Digital Signal Processing Systems: Design and Implementation; John Wiley & Sons: New York, NY, USA, 1999. [Google Scholar]
- Parhi, K.K.; Nishitani, T. VLSI architectures for discrete wavelet transforms. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 1993, 1, 191–202. [Google Scholar] [CrossRef]
- Kabir, M.A.; Shahnaz, C. Denoising of ECG signals based on noise reduction algorithms in EMD and wavelet domains. Biomed. Signal Process. Control 2012, 7, 481–489. [Google Scholar] [CrossRef]
- Karthikeyan, P.; Murugappan, M.; Yaacob, S. ECG signal denoising using wavelet thresholding techniques in human stress assessment. Int. J. Electr. Eng. Inf. 2012, 4, 306–319. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Schafer, R.W. Discrete-time Signal Processing. Prentice Hall; Upper Saddle River: Saddle River, NJ, USA, 1999. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.-W.; Chen, Y.-H. Hardware Design and Implementation of a Wavelet De-Noising Procedure for Medical Signal Preprocessing. Sensors 2015, 15, 26396-26414. https://0-doi-org.brum.beds.ac.uk/10.3390/s151026396
Chen S-W, Chen Y-H. Hardware Design and Implementation of a Wavelet De-Noising Procedure for Medical Signal Preprocessing. Sensors. 2015; 15(10):26396-26414. https://0-doi-org.brum.beds.ac.uk/10.3390/s151026396
Chicago/Turabian StyleChen, Szi-Wen, and Yuan-Ho Chen. 2015. "Hardware Design and Implementation of a Wavelet De-Noising Procedure for Medical Signal Preprocessing" Sensors 15, no. 10: 26396-26414. https://0-doi-org.brum.beds.ac.uk/10.3390/s151026396