
Spatial Quality Evaluation of Resampled Unmanned Aerial Vehicle-Imagery for Weed Mapping


 ,
,
Abstract
:1. Introduction
2. Experimental Section
2.1. Locations, Flights and Sensors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Flight Altitude (m) | Sensor * | |||
|---|---|---|---|---|---|
| RGB | TTC | ||||
| Length (min) | Area (ha) | Length (min) | Area (ha) | ||
| 1 | 30 | 12 | 0.4 | 27 | 0.07 |
| 60 | - ** | - | |||
| 100 | 5 | 1.7 | 7 | 0.4 | |
| 2 | 30 | 11.5 | 0.3 | 28 | 0.06 |
| 60 | 5.4 | 0.6 | 11.1 | 0.14 | |
| 100 | 5 | 1.77 | 7 | 0.38 | |
2.2. Resampling: Spatial Degradation of Fine Quality Images

2.3. Weed Detection
3. Results and Discussion
3.1. Evaluation of Similarity and Quality between RS-Image and UAV-Image
| Field | Sensor * | Flight Altitude (m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 60 | 100 | ||||||||||
| Pixel Size (cm) | File Size (MB) | RMSE (cm) | Pixel Size (cm) | File Size (MB) | RMSE (cm) | ||||||
| UAV-I ** | RS-I | X | Y | UAV-I | RS-I | X | Y | ||||
| 1 | RGB | - § | - | - | - | - | 3.31 | 3.07 | 18.4 | 0.89 | 1.19 |
| TTC | 3.2 | 3.25 | 13.3 | 1.22 | 1.12 | 5.41 | 5.42 | 4.82 | 1.13 | 1.21 | |
| 2 | RGB | 1.99 | 1.84 | 75.8 | 0.87 | 0.67 | 3.37 | 3.07 | 27.2 | 1.24 | 1.11 |
| TTC | 3.2 | 3.25 | 24.3 | 1.12 | 1.08 | 5.41 | 5.42 | 8.75 | 1.19 | 1.24 | |
| Band | UAV-I * 30 m | RS-I 60 m | RS-I 100 m |
|---|---|---|---|
| R | 161.11 ± 24.25 | 161.11 ± 24.25 | 161.11 ± 24.25 |
| G | 121.64 ± 24.94 | 121.64 ± 24.93 | 121.64 ± 24.94 |
| B | 86.73 ± 22.98 | 86.73 ± 22.97 | 86.73 ± 22.98 |
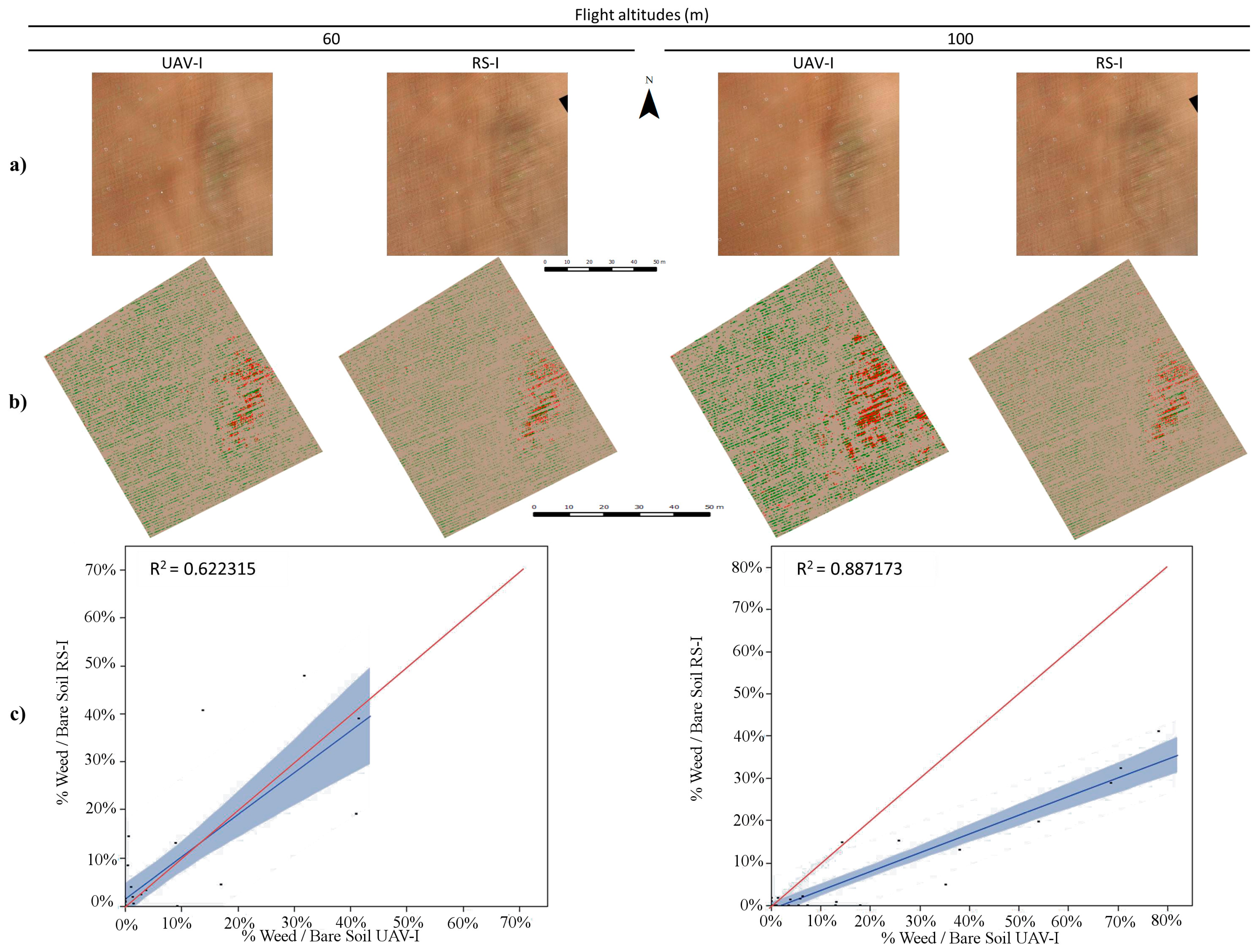
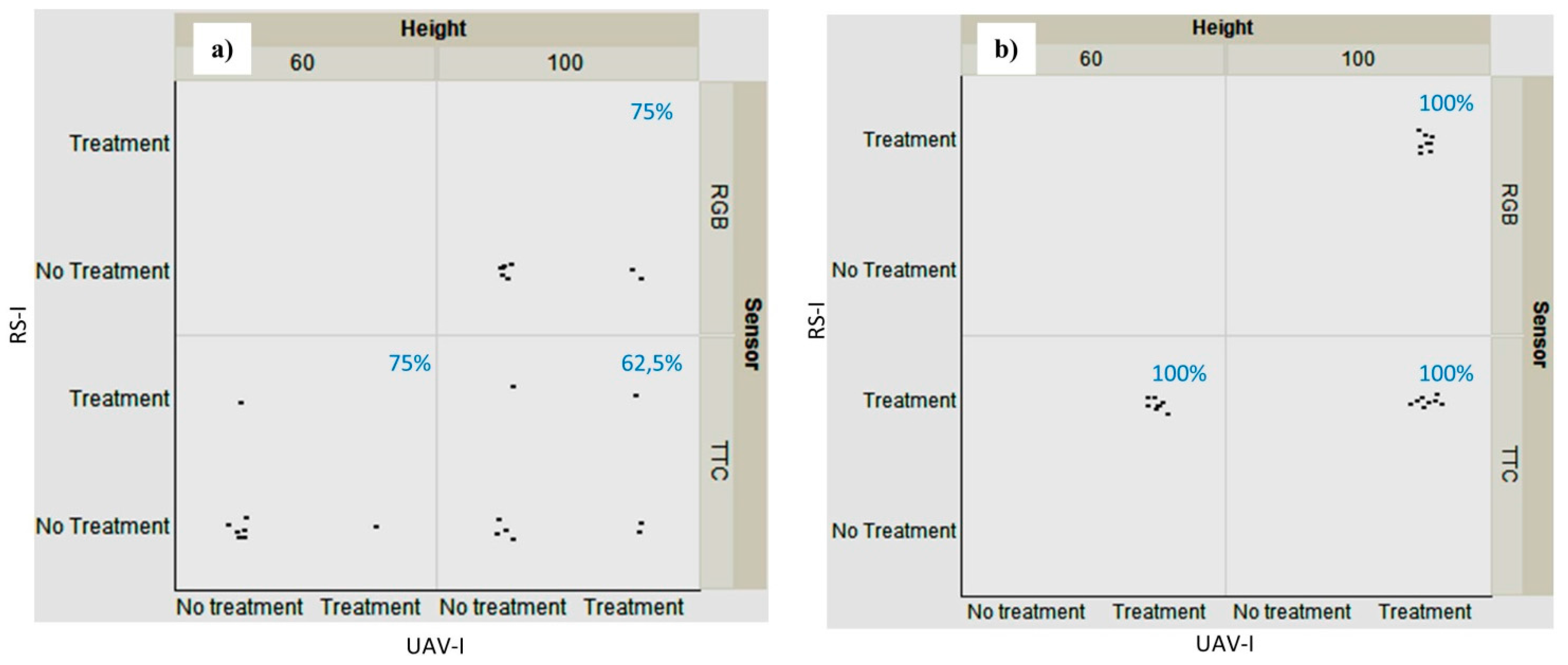
3.2. Weed Detection: Mapping and Accuracy

| Field | Sensor | Flight Altitude (m) | |||
|---|---|---|---|---|---|
| 60 | 100 | ||||
| Estimation of Area Covered by Weed (%) | |||||
| UAV-I * | RS-I | UAV-I | RS-I | ||
| 1 | RGB | - ** | - | 23 | 17 |
| TTC | 25 | 40 | 29 | 46 | |
| 2 | RGB | 10 | 12 | 20 | 12 |
| TTC | 16 | 19 | 20 | 21 | |





4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jurado-Expósito, M.; López-Granados, F.; García-Torres, L.; García-Ferrer, A.; de la Orden, M.S.; Atenciano, S. Multi-Species Weed Spatial Variability and Site-Specific Management Maps in Cultivated Sunflower. Weed Sci. 2003, 51, 319–328. [Google Scholar] [CrossRef]
- Barroso, J.; Fernàndez-Quintanilla, C.; Ruiz, D.; Hernaiz, P.; Rew, L. Spatial stability of Avena sterilis ssp. ludoviciana populations under annual applications of low rates of imazamethabenz. Weed Res. 2004, 44, 178–186. [Google Scholar]
- Andújar, D.; Barroso, J.; Fernández-Quintanilla, C.; Dorado, J. Spatial and temporal dynamics of Sorghum halepense patches in maize crops. Weed Res. 2012, 52, 411–420. [Google Scholar] [CrossRef]
- Torra, J.; Cirujeda, A.; Taberner, A.; Recasens, J. Evaluation of herbicides to manage herbicide-resistant corn poppy (Papaver rhoeas) in winter cereals. Crop Prot. 2010, 29, 731–736. [Google Scholar] [CrossRef]
- Torra, J.; Esnal, A.R.; Guinjuan, J.R. Management of herbicide-resistant Papaver rhoeas in dry land cereal fields. Agron. Sustain. Dev. 2011, 31, 483–490. [Google Scholar] [CrossRef]
- Cirujeda, A.; Taberner, A. Cultural control of herbicide-resistant Lolium rigidum Gaud. populations in winter cereal in Northeastern Spain. Span. J. Agric. Res. 2009, 7, 146–154. [Google Scholar] [CrossRef]
- Cirujeda, A.; Taberner, A. Chemical control of herbicide-resistant Lolium rigidum Gaud. in north-eastern Spain. Pest Manag. Sci. 2010, 66, 1380–1388. [Google Scholar] [CrossRef] [PubMed]
- Castro-Tendero, A.J.; García-Torres, L. SEMAGI—An expert system for weed control decision making in sunflowers. Crop Prot. 1995, 14, 543–548. [Google Scholar] [CrossRef]
- Longchamps, L.; Panneton, B.; Simard, M.-J.; Leroux, G.D. An Imagery-Based Weed Cover Threshold Established Using Expert Knowledge. Weed Sci. 2014, 62, 177–185. [Google Scholar] [CrossRef]
- López-Granados, F.; Torres-Sánchez, J.; Serrano-Pérez, A.; de Castro, A.I.; Peña-Barragán, J.M. Early weed mapping in sunflower by using UAV technology: Variability of herbicide treatment maps against weed threshold. Precis. Agric. 2015, in press. [Google Scholar]
- Swanton, C.J.; Weaver, S.; Cowan, P.; Acker, R.V.; Deen, W.; Shreshta, A. Weed Thresholds. J. Crop Prod. 1999, 2, 9–29. [Google Scholar] [CrossRef]
- Petit, S.; Boursault, A.; Guilloux, M.L.; Munier-Jolain, N.; Reboud, X. Weeds in agricultural landscapes. A review. Agron. Sustain. Dev. 2011, 31, 309–317. [Google Scholar] [CrossRef]
- López-Granados, F.; Jurado-Expósito, M.; Peña-Barragán, J.M.; García-Torres, L. Using Remote Sensing for Identification of Late-Season Grass Weed Patches in Wheat. Weed Sci. 2006, 54, 346–353. [Google Scholar]
- Peña-Barragán, J.M.; López-Granados, F.; Jurado-Expósito, M.; García-Torres, L. Mapping Ridolfia segetum patches in sunflower crop using remote sensing. Weed Res. 2007, 47, 164–172. [Google Scholar] [CrossRef]
- De Castro, A.I.; López-Granados, F.; Jurado-Expósito, M. Broad-scale cruciferous weed patch classification in winter wheat using QuickBird imagery for in-season site-specific control. Precis. Agric. 2013, 14, 392–413. [Google Scholar] [CrossRef]
- De Castro, A.I.; Jurado-Expósito, M.; Peña-Barragán, J.M.; López-Granados, F. Airborne multi-spectral imagery for mapping cruciferous weeds in cereal and legume crops. Precis. Agric. 2011, 13, 302–321. [Google Scholar] [CrossRef]
- Castillejo-González, I.L.; Peña-Barragán, J.M.; Jurado-Expósito, M.; Mesas-Carrascosa, F.J.; López-Granados, F. Evaluation of pixel- and object-based approaches for mapping wild oat (Avena sterilis) weed patches in wheat fields using QuickBird imagery for site-specific management. Eur. J. Agron. 2014, 59, 57–66. [Google Scholar] [CrossRef]
- López-Granados, F. Weed detection for site-specific weed management: Mapping and real-time approaches. Weed Res. 2011, 51, 1–11. [Google Scholar] [CrossRef]
- Pajares, G. Overview and current status of Remote Sensing applications based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, in press. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; de Castro, A.I.; Peña-Barragán, J.M. Configuration and Specifications of an Unmanned Aerial Vehicle (UAV) for Early Site Specific Weed Management. PLoS ONE 2013, 8, e58210. [Google Scholar] [CrossRef] [PubMed]
- Gómez-Candón, D.; Castro, A.I.D.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Dodgson, N.A. Image Resampling; University of Cambridge, Computer Laboratory: Cambridge, UK, 1992; p. 264. [Google Scholar]
- Chuvieco, E. Fundamentos de Teledeteccion Espacial; Rialp: Madrid, Spain, 1996. [Google Scholar]
- Sachs, J. Image Resampling; Digital Light & Color: Cambridge, MA, USA, 2001; pp. 1–14. [Google Scholar]
- Moreno, J.F.; Melia, J. An optimum interpolation method applied to the resampling of NOAA AVHRR data. IEEE Trans. Geosci. Remote Sens. 1994, 32, 131–151. [Google Scholar] [CrossRef]
- Oleson, K.W.; Sarlin, S.; Garrison, J.; Smith, S.; Privette, J.L.; Emery, W.J. Unmixing multiple land-cover type reflectances from coarse spatial resolution satellite data. Remote Sens. Environ. 1995, 54, 98–112. [Google Scholar] [CrossRef]
- Boccardo, P.; Borgogno Mondino, E.; Claps, P.; Perez, F. Image resolution effects for vegetation mapping from Landsat 7 ETM+ and Terra Modis data. In Water Resources Assessment under Water Scarcity Scenarios; La Loggia, G., Aronica, G.T., Ciraolo, G., Eds.; CDSU Publ: Milano, Italy, 2007; pp. 69–94. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Peña, J.M. An automatic object-based method for optimal thresholding in UAV images: Application for vegetation detection in herbaceous crops. Comput. Electron. Agric. 2015, 114, 43–52. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; Peña, J.M.; de Castro, A.I.; López-Granados, F. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV. Comput. Electron. Agric. 2014, 103, 104–113. [Google Scholar] [CrossRef]
- Peña, J.M.; Torres-Sánchez, J.; Serrano-Pérez, A.; de Castro, A.I.; López-Granados, F. Quantifying Efficacy and Limits of Unmanned Aerial Vehicle (UAV) Technology for Weed Seedling Detection as Affected by Sensor Resolution. Sensors 2015, 15, 5609–5626. [Google Scholar] [CrossRef] [PubMed]
- Peña, J.M.; Torres-Sánchez, J.; de Castro, A.I.; Kelly, M.; López-Granados, F. Weed Mapping in Early-Season Maize Fields Using Object-Based Analysis of Unmanned Aerial Vehicle (UAV) Images. PLoS ONE 2013, 8, e77151. [Google Scholar] [PubMed]
- Meier, U. Growth Stages of Mono- and Dicotyledonous Plants. BBCH Monograph; Biologische Bundesanstalt für Land- und Forstwirtschaft: Berlin, Germany, 1997. [Google Scholar]
- Richards, J.A.; Jia, X. Remote Sensing Digital Image Analysis—An Introduction, 4th ed.; Springer: Berlin, Germany, 2006. [Google Scholar]
- Li, J. Spatial quality evaluation of fusion of different resolution images. Int. Arch. Photogramm. Remote Sens. 2000, 33, 339–346. [Google Scholar]
- The American Society for Photogrammetry and Remote Sensing. ASPRS Accuracy standards for large scale maps. Photogramm. Eng. Remote Sens. 1990, 56, 1068–1070. [Google Scholar]
- Haarbrink, R.B.; Eisenbeiss, H. Accurate DSM production from unmanned helicopter systems. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008; Volume XXXVII, pp. 1259–1264.
- Gibson, K.D.; Dirks, R.; Medlin, C.R.; Johnston, L. Detection of Weed Species in Soybean Using Multispectral Digital Images. Weed Technol. 2004, 18, 742–749. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borra-Serrano, I.; Peña, J.M.; Torres-Sánchez, J.; Mesas-Carrascosa, F.J.; López-Granados, F. Spatial Quality Evaluation of Resampled Unmanned Aerial Vehicle-Imagery for Weed Mapping. Sensors 2015, 15, 19688-19708. https://0-doi-org.brum.beds.ac.uk/10.3390/s150819688
Borra-Serrano I, Peña JM, Torres-Sánchez J, Mesas-Carrascosa FJ, López-Granados F. Spatial Quality Evaluation of Resampled Unmanned Aerial Vehicle-Imagery for Weed Mapping. Sensors. 2015; 15(8):19688-19708. https://0-doi-org.brum.beds.ac.uk/10.3390/s150819688
Chicago/Turabian StyleBorra-Serrano, Irene, José Manuel Peña, Jorge Torres-Sánchez, Francisco Javier Mesas-Carrascosa, and Francisca López-Granados. 2015. "Spatial Quality Evaluation of Resampled Unmanned Aerial Vehicle-Imagery for Weed Mapping" Sensors 15, no. 8: 19688-19708. https://0-doi-org.brum.beds.ac.uk/10.3390/s150819688