1. Introduction
As one significant component of space environmental weather, the ionosphere is one of the critical error sources for a diversity of applications using satellite navigation, e.g., farming, construction, exploration, surveying and civil aviation [
1]. Although, the effect of the ionosphere on the Global Navigation Satellite System (GNSS) could be weakened by modeling or dual-frequency combination using the GNSS receiver, which is the key sensor for satellite navigation [
2,
3,
4]. The ionosphere also has to be monitored; this is because the ionospheric anomaly, which cannot be detected in a timely manner, would yield a false position result or even a disaster outcome for safety-of-life applications [
5]. For example, the precision aircraft landing supported by the Ground-Based Augmentation System (GBAS) is vulnerable to rare ionospheric anomalies [
6]. Since the estimation accuracy and response time of ionospheric anomaly monitoring are very demanding and challenging for GBAS relative to other safety-critical services [
7,
8,
9], therefore, how to detect an ionospheric anomaly rapidly and accurately is the potential research direction of ionospheric anomaly monitoring for GBAS.
GBAS is implemented by the technique of code-based differential positioning, which aims at improving the positioning accuracy and reliability simultaneously by broadcasting the differential corrections and integrity information from a reference station. The typical implementation of GBAS is the Local Area Augmentation System (LAAS), which has been widely used in civil aviation to aid the precision of the approach and landing. Aiming at improving positioning accuracy, LAAS has recommended the utilization of the carrier-smoothed-code (CSC) technique to suppress the error of the multipath and receiver noise in code measurements.
Besides the single-frequency-based combination, the CSC can also be categorized into another two groups with respect to the combination of dual-frequency code and phase observations,
i.e., the divergence-free (DFree) model and the ionosphere-free (IFree) model [
10,
11,
12,
13]. However, the DFree and IFree models are not yet available for civil aviation applications, as the second GPS frequency (L2) does not fall in a protected Aeronautical Radio Navigation Service (ARNS) band and the proposed third GPS frequency (L5) is not widely available currently [
14]. Meanwhile, the cost of the dual-frequency receiver is too high to be widely used. Therefore, the single-frequency Hatch filter model has been recommended by GBAS.
Although the positioning accuracy is improved by the single-frequency smoothed pseudorange in normal conditions, the ionospheric gradient, which is a dominant threat for GBAS during ionosphere storm events, will be introduced into the smoothed pseudorange corrections due to the fact that the ionosphere affects satellite signal propagation by lagging code measurements while leading carrier-phase measurements, namely code-carrier divergence (CCD) [
5]. Many ionospheric gradient anomaly events, which are mainly caused by solar storms, have been observed, for example in 2000 and 2003 [
15]. It has been shown that differential ranging errors due to the abnormal ionospheric gradient between the reference and users could exceed 3–5 m in a baseline of less than 5 km during ionosphere storm hits [
16]. Therefore, the ionosphere storm events can create unacceptable positioning error, even over a short baseline, which could be a disaster for safety-of-life applications.
For GBAS, the ionospheric anomaly model can always be modeled as a steep traveling wave-front between regions of low (
i.e., 3) and high (
i.e., 1) ionospheric delay depending on a large amount of GPS data, as shown in
Figure 1 [
15]. The wave-front is described as a piecewise linear curve by three parameters: max ionospheric delay, front speed and gradient width.
Figure 1a shows a linear change in 2 between 1 and 3. The steady accumulated error of single frequency carrier smoothing will be much larger if a steep gradient in the ionospheric is delayed; in this case, a huge degradation of accuracy would happen [
17]. Therefore, we focus on the ionospheric gradient anomaly, which is a dominant threat for GBAS, rather than the ionospheric delays’ anomaly. The ionospheric gradient anomaly model in
Figure 1b can be derived from
Figure 1a.
In order to ensure the integrity of code-based differential positioning by the CSC technique in GBAS, many researchers are working on improving the estimation accuracy of the ionospheric gradient and response time to the ionospheric gradient anomaly simultaneously, namely CCD monitoring. For the purpose of meeting the Minimal Operational Performance Standards (MOPS) requirements on the ionospheric gradient anomaly for LAAS [
18,
19], a geometric moving averaging (GMA) method of a linear time-invariant first-order low-pass filter (called CCD-1OF) is used to consider both the estimate accuracy of the ionospheric gradient and the response time to the ionospheric gradient anomaly, as the recommended integrity monitoring algorithm of LAAS [
20]. However, there is a counterbalance that the accuracy of estimation and the response time to the anomaly cannot be improved simultaneously with a fixed time constant. Then, Kim designed a feasible generalized least square (GLS) method to estimate the ionospheric gradient, assuming that the gradient is a constant over tens of minutes [
21]. Nevertheless, the estimation accuracy is barely satisfactory, because the integer ambiguity solution cannot be fixed, and the response time is too long to detect the ionospheric gradient. In order to obtain real-time ionosphere delay, Ouzeau suggested a traditional Kalman filter method to estimate both ionosphere delay and integer ambiguity [
22]. Although this method satisfies the real-time requirement, the estimation accuracy will be affected when the system model and the actual situation are mismatch. In addition, the line-of-sight ionosphere delay can also be estimated accurately by precise point positioning; however, being in real time cannot be guaranteed, and the estimation accuracy is easily affected by abnormal satellite attitude [
23,
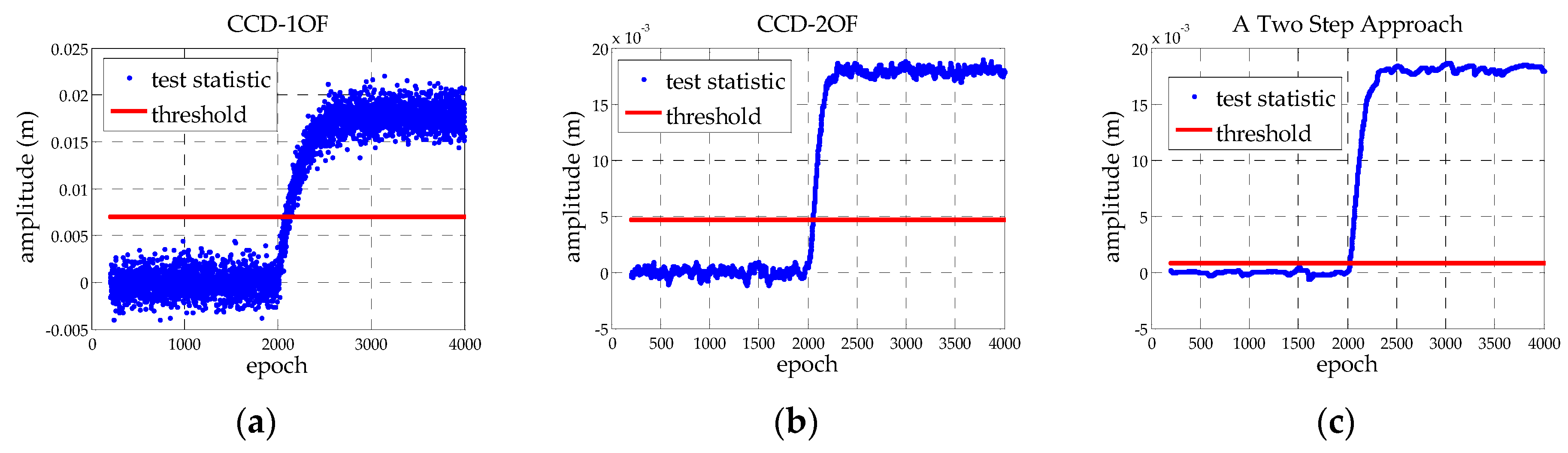
24]. On the basis of CCD-1OF, Simili has proposed a cascaded first-order linear time-invariant low-pass filter method (called CCD-2OF) to improve both the response time to the anomaly and the estimation accuracy [
25]. However, there is a common shortcoming between CCD-1OF and CCD-2OF with a fixed time constant.
Considering the MOPS requirements for LAAS on estimation accuracy and response time, in order to release the limitation between the estimation accuracy and the response time by traditional CCD methods with a fixed time constant, a TSA is introduced by integrating a cascaded first-order linear time-invariant low-pass filter with an adaptive Kalman filter based on the traditional GPS receiver. Firstly, the a priori information of the adaptive Kalman filter is calculated in the first step of TSA, and the real-time accuracy of the ionosphere increases by an adaptive Kalman filter for a non-stationary system in the second step, compared to the traditional CCD methods.
The remainder of paper is organized as follows. Firstly, the counterbalance between the response time and estimation accuracy is analyzed based on the MOPS requirements for LAAS, followed by a description of traditional CCD methods. Secondly, a TSA is proposed to monitor the first-order ionospheric gradient anomaly by integrating a cascaded first-order linear time-invariant low-pass filter with an adaptive Kalman filter. Thirdly, numerical and real GPS data simulations are provided to demonstrate the proposed approach, compared to the traditional methods. Finally, a conclusion and a discussion will follow.
2. Limitations of the Traditional CCD Methods
Both the CCD-1OF and CCD-2OF methods adopt a linear time-invariant low-pass method to estimate the ionospheric gradient by suppressing the high frequency noise. Nevertheless, both of them have a common limitation that the response time and estimation accuracy cannot be improved simultaneously with a fixed time constant. In order to analyze the limitation, the traditional CCD models are provided first.
2.1. Traditional CCD Methods
The code and carrier-phase measurements can be modeled as,
where
ρ is the pseudo-range measurement between the receiver and satellite,
φ is the carrier-phase measurement,
r is the geometric range between the receiver and satellite,
and
are the satellite and receiver clock error, respectively,
I and
T are the ionospheric and tropospheric error, respectively,
N is the integer ambiguity, λ is the carrier wavelength,
m represents the pseudo-range multipath error, with the effect of multipath on the carrier phase being assumed to be zero, and
and
are the pseudo-range and carrier-phase measurement errors, respectively. The subscript
k indicates the
k-th epoch.
From Equations (1) and (2), the code minus carrier (CMC) in the
k-th epoch can be written as,
Assuming the absence of cycle slips, the ionospheric gradient is introduced in the difference of the adjacent epoch CMC as follows,
where
Ts is the sample time and
Ig represents the ionospheric gradient. With the use of Equation (4), it can be found that the difference of the adjacent epoch CMC includes the double ionospheric gradient and multipath receiver noise. The noise greatly affects the estimation accuracy of the ionospheric gradient, when it is much bigger. Therefore, the traditional CCD methods normally use the linear time-invariant low-pass method to estimate the ionospheric gradient by suppressing the high frequency noise. The test statistic of CCD-1OF is expressed as [
22],
where
τd1 is the time constant for the first-order linear time-invariant low-pass filter model,
Ts is the sample time and
is the ionospheric gradient estimation by attenuating the high-frequency component.
To expedite the detection of the ionospheric gradient anomaly, a CCD-2OF method is proposed by using two first-order linear time-invariant low-pass filters to suppress the high frequency noise to the test statistic by replacing Equation (5) with the following [
25],
where
τd2 is the time constant and
is the ionospheric gradient estimation by CCD-2OF. This method not only decreases the level of signal fluctuation with two relatively small time constants, but also increases the detection speed under the ionospheric gradient anomaly conditions, which meet the further MOPS requirements for LAAS on CCD monitoring [
25].
After the test statistics of traditional CCD methods are chosen, in order to detect the ionospheric gradient anomaly, the detection threshold should be determined first. The detection threshold can be calculated based on the statistical parameter of the test statistics normally computed using the mean and the standard deviation of the estimator in terms of satellite elevations under fault-free conditions [
11],
where
and
are the mean and standard deviation of test statistics at the elevation angle of
el, respectively.
Kffd is a multiplier, so that the monitor can meet the false alarm requirement,
f is an inflation factor to over-bound the heavy-tailed distribution of the test statistic. The detection threshold reflects the ability to detect the minimum change of the ionospheric gradient.
Although the CCD-2OF is superior to the CCD-1OF with their corresponding time constants on both estimation accuracy and response time to the anomaly, there is a limitation that the estimation accuracy and response time to the anomaly cannot be improved simultaneously [
25]. This will be discussed in the time domain and the frequency domain, respectively.
2.2. Limitation between Estimation Accuracy and Response Time to Anomaly
The MOPS provides significant flexibility to avionics manufacturers by quantitatively specifying that the airborne filter need only match the ground filter with the following requirements for LAAS [
25]:
“The nominal ionospheric CCD rate is given in The Local Area Augmentation System (LAAS) Ground Faclity (LGF) Specification as normally distributed with zero mean and standard deviation of 0.018 m/s. In response to a CCD rate of up to 0.018 m/s, the smoothing filter output shall achieve an error less than 0.25 m within 200 s after initialization relative to the steady-state response of filters specified in LGF.”
Although the MOPS requirements above are aimed at CSC, the ionospheric gradient, which is a dominant threat for GBAS during ionosphere storm events, will be introduced into the CSC due to the CCD effect. In order to ensure the integrity for the CSC, especially for the ionospheric gradient anomaly, the CCD monitoring method must be designed based on the requirements for the CSC. Therefore, the MOPS above for the CSC can equivalently be the threshold of the ionospheric gradient for CCD. From the MOPS requirements for LAAS on the CSC above, we know that the estimation accuracy of the ionospheric gradient and response time to the ionospheric gradient anomaly must be considered simultaneously, when a CCD monitoring model is designed.
Firstly, in order to meet the MOPS on response time to anomaly and the steady error, the relationship between the response time, the steady error and the time constant are discussed for CCD-1OF, respectively. From Equation (4), when z
k − z
k−1 is regarded as the unit ramp input, the transfer function Φ(
s) in the S-domain is expressed as,
where
is in inverse proportion of the time constant and can be written as,
Assuming that the sample time
Ts is 1
s, From Equations (8) and (9), the unit ramp response
can be written as,
From Equation (10), the steady-state error
and the response time
tr, the time when the response value reaches 0.95 of the steady-state, can be expressed as,
From Equations (11) and (12), it is obvious that the time constant is proportional to steady-state error and response time.
Secondly, as seen from Equation (4), it is shown that the test statistic includes both the ionospheric gradient and high frequency noise. In order to more accurately detect the change of the ionospheric gradient, the linear time-invariant low-pass filter is adopted by traditional CCD methods to suppress the effect of high frequency noise on the test statistic. Therefore, the relationship between the time constant and estimation accuracy is discussed in the frequency domain.
We know that the cut-off frequency of the system can reflect the ability of denoising. From Equation (8), we can get the relationship between the cut-off frequency of system
wb and the time constant
τd1,
where
wb is defined as the frequency when the amplitude of the amplitude-frequency characteristic curve descends by −3 dB.
is in inverse proportion to
τd1. We find that the time constant is in inverse proportion to estimation accuracy.
Finally, from Equations (12) and (13), we find that there is a counterbalance between the estimation accuracy of the ionospheric gradient and the response time to the ionospheric gradient anomaly, regardless of the time constant.
Regarding the CCD-1OF method, the unit ramp response
, response time
and cut-off frequency
wb1 of the CCD-2OF method can be expressed as:
Assuming that the sample time is constant, and τd1 = τd2, the time constant is different from the CCD-1OF. From Equations (15) and (16), we find that the time constant is in direct proportion to response time and in inverse proportion to estimation accuracy. Therefore, there is a common shortcoming between CCD-1OF and CCD-2OF with the fixed time constant.
In summary, the above analysis shows that the estimation accuracy of the ionospheric gradient and response time to the ionospheric gradient anomaly of the traditional CCD methods cannot be improved simultaneously by just adjusting the time constants. In order to improve the estimation accuracy and response time at the same time, the test statistic must be constructed in a new method.
5. Conclusions
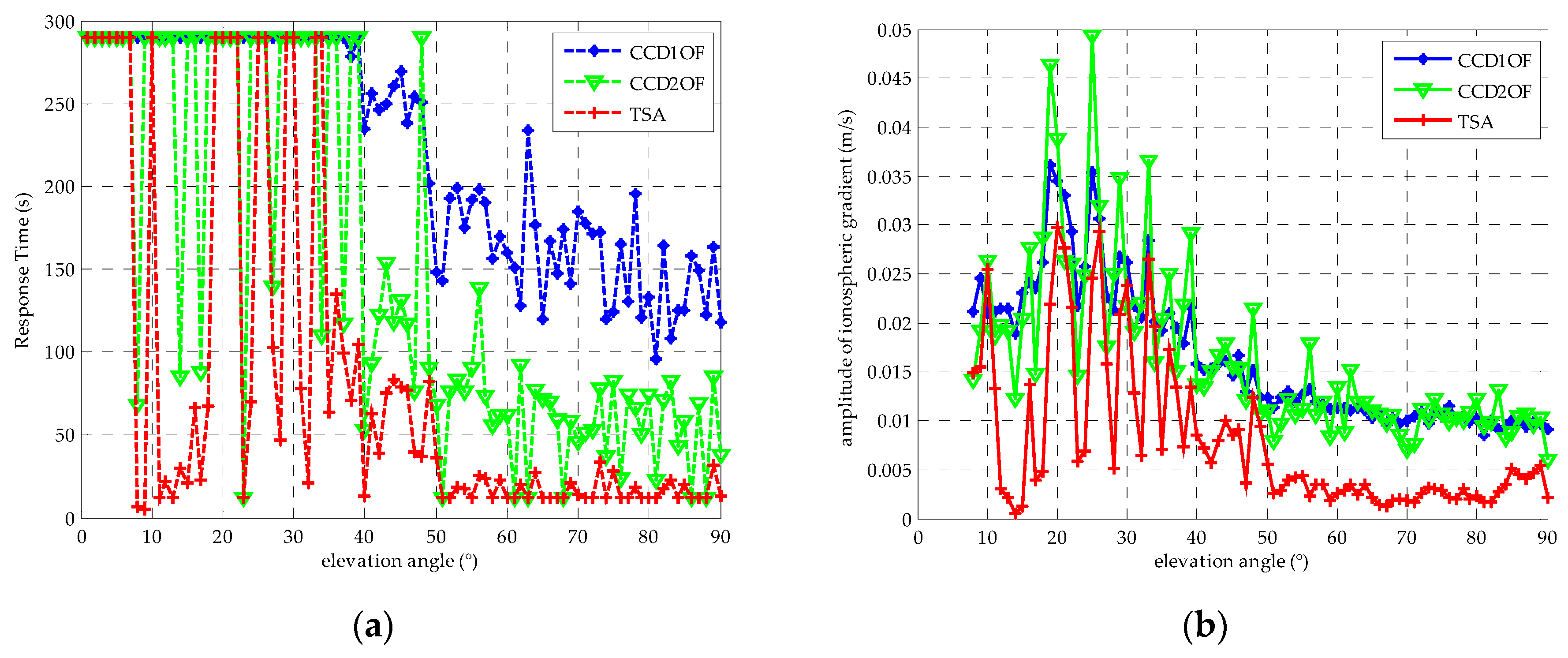
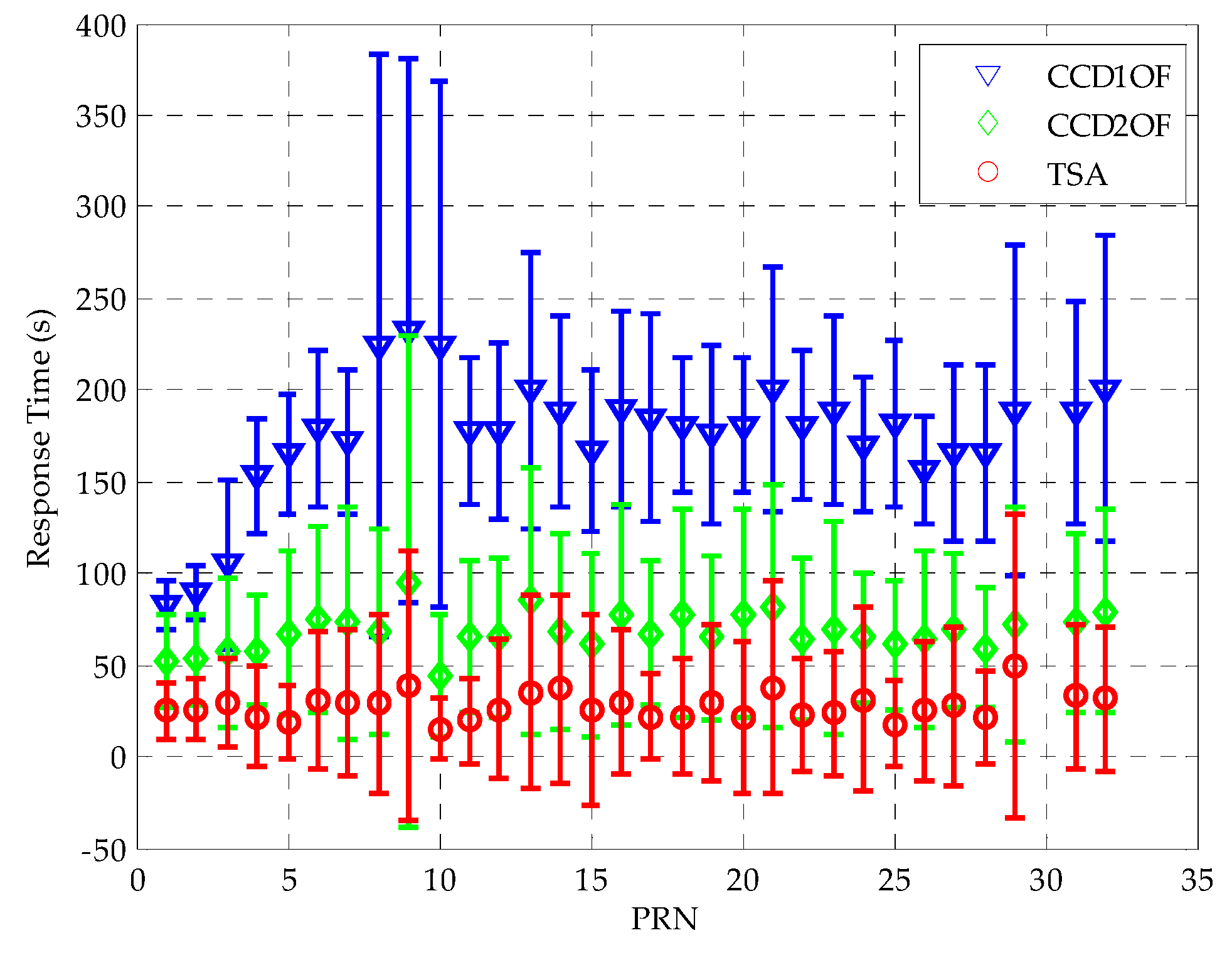
Ionospheric anomaly monitoring is an important integrity monitor procedure for GBAS. The contribution of this paper is to develop and test a new ionospheric anomaly monitoring algorithm by using the GPS receiver, which overcomes the traditional CCD monitoring methods that the estimation accuracy and response time to anomaly cannot be improved simultaneously with a fixed time constant for GBAS, achieving the real-time detection of the first-order ionospheric gradient. From our simulations, it is shown that the TSA provides a better ionospheric gradient monitoring performance, which is reflected by the response time to anomaly and the detection sensitivity, compared to the traditional CCD methods, such as CCD-1OF and CCD-2OF. The estimation accuracy of the ionospheric gradient, response time and detection sensitivity to the ionospheric gradient anomaly results from the real-world GPS data has also indicated that the TSA provides a better ionospheric gradient monitoring performance. By deriving the test statistic Ig based on integrating the cascaded linear time-invariant low-pass filters with the adaptive Kalman filter, the TSA achieves the superior ionospheric gradient monitoring performance using two innovations: (1) the TSA adopts an optimal time constant in the first step with an a priori noise characteristic, unlike the traditional CCD methods with fixed time constants; (2) the Kalman system model is designed based on the ionospheric gradient and its change rate by adjusting the variance-covariance matrix Q, which more precisely characterizes the ionospheric variation.
Note that these results are based on limited data; we are conducting further work to fully characterize the performance of the TSA under different operational conditions, especially the determination of the time constant at different elevations. Through the research of this paper, the future research work includes: first, we regard the multipath and receiver noise as the Gaussian white noise in the TSA; therefore, the new Kalman model should be constructed to overcome the assumption; second, the a priori information of TSA is greater than the traditional CCD methods; therefore, the adaptive time constant model should be constructed to reduce the amount of calculation.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}