Design of a Hybrid Indoor Location System Based on Multi-Sensor Fusion for Robot Navigation

 ,
,
Abstract
:1. Introduction
- An indoor localization system in a fusion of multiple sensors is designed, improving the accuracy rate and efficiency of global positioning for the indoor service robot.
- A novel Wi-Fi fingerprint localization algorithm called KNNBP is created. Compared with the traditional fingerprinting algorithm, this algorithm adopts the similarity degree based on conditional probability instead of Euclidean distance, thus improving positioning accuracy and adaptability to diverse indoor environments.
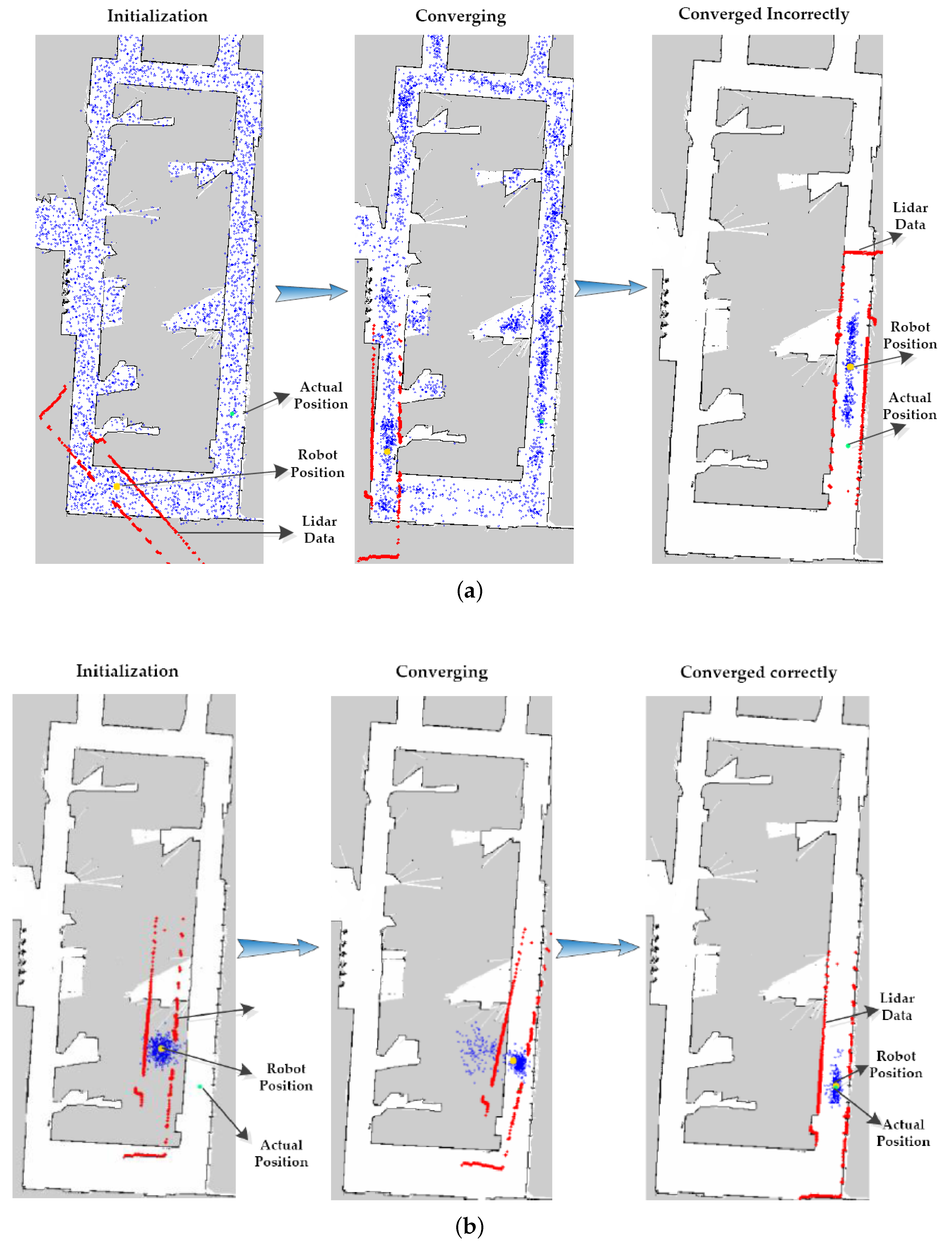
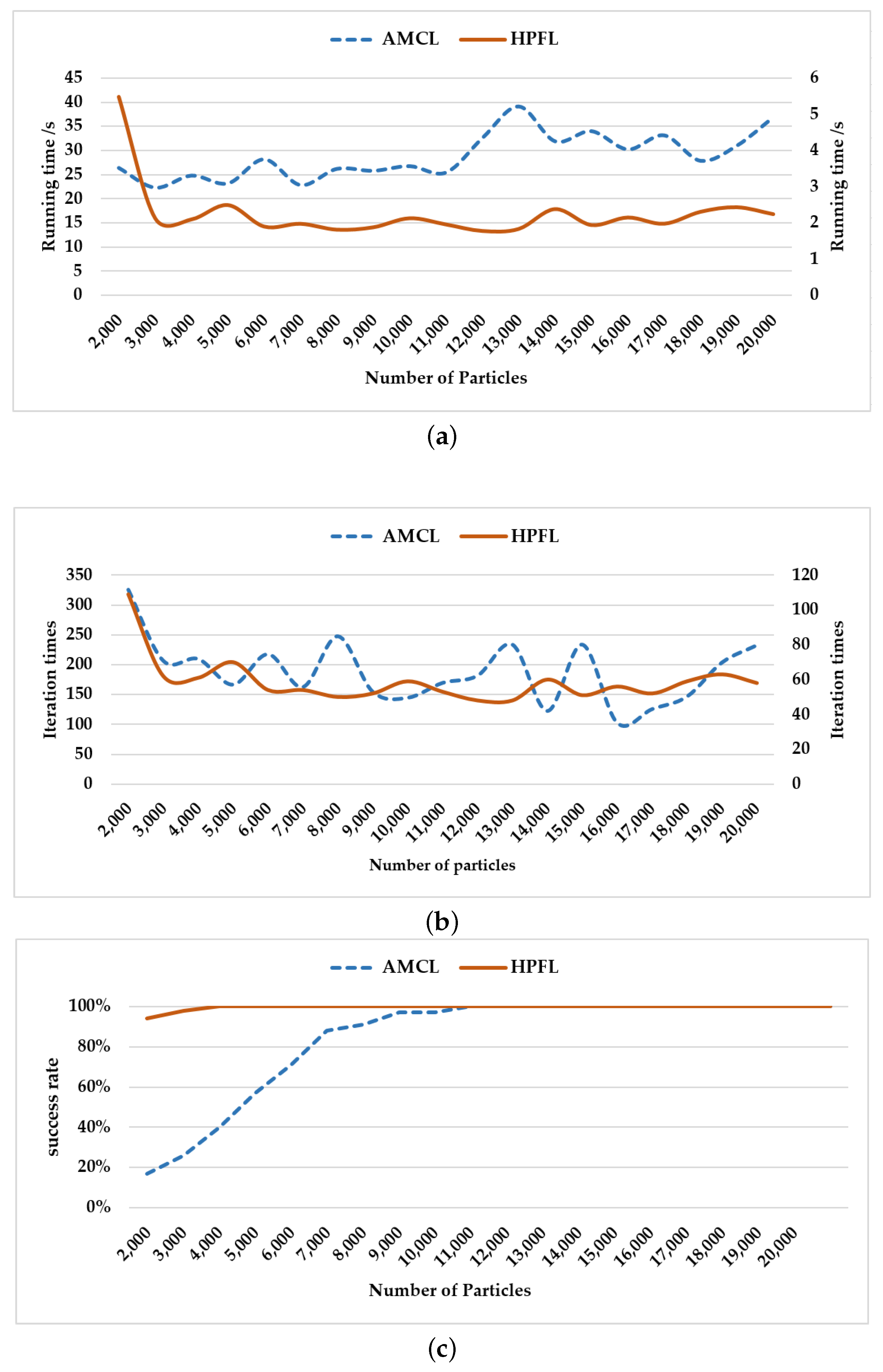
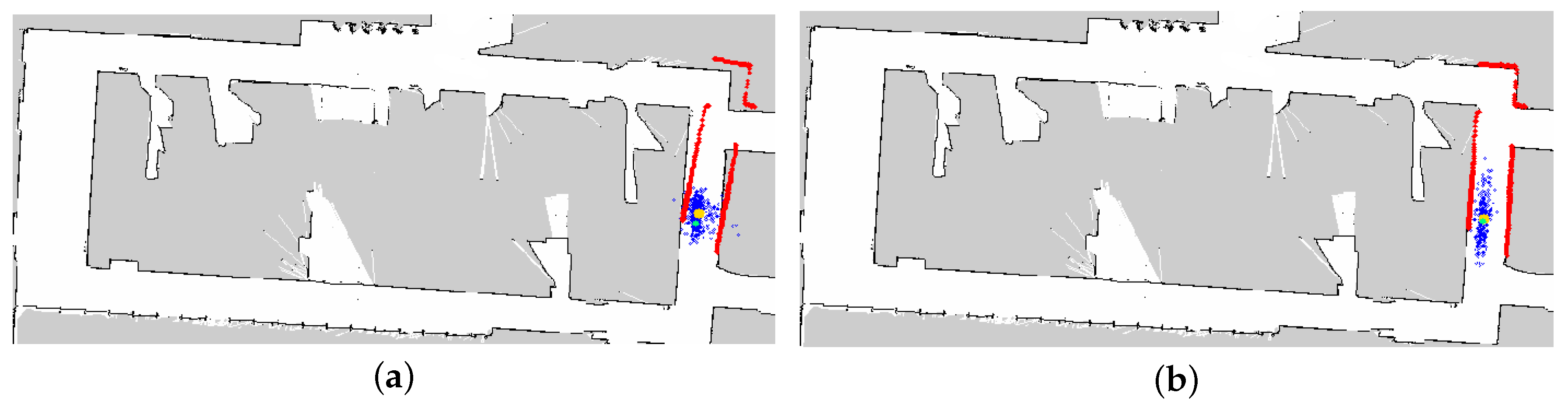
- HPFL is proposed, and saves computing resources compared with the traditional Monte Carlo localization. Thus, the real-time performance and accuracy are both achieved. Moreover, due to the amelioration of particle diversity, the robustness of local pose estimation is also improved.
2. System Overview and Methodology
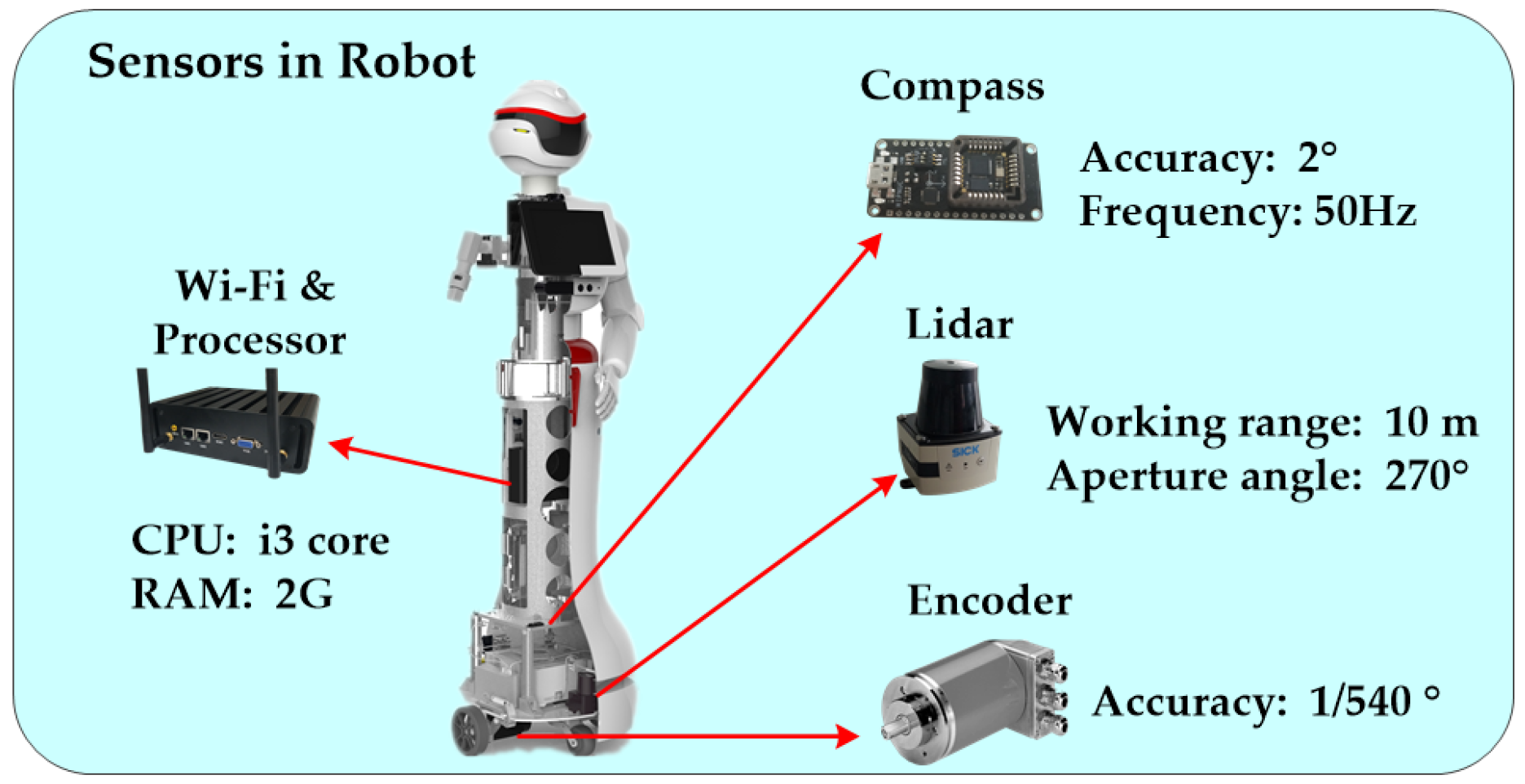
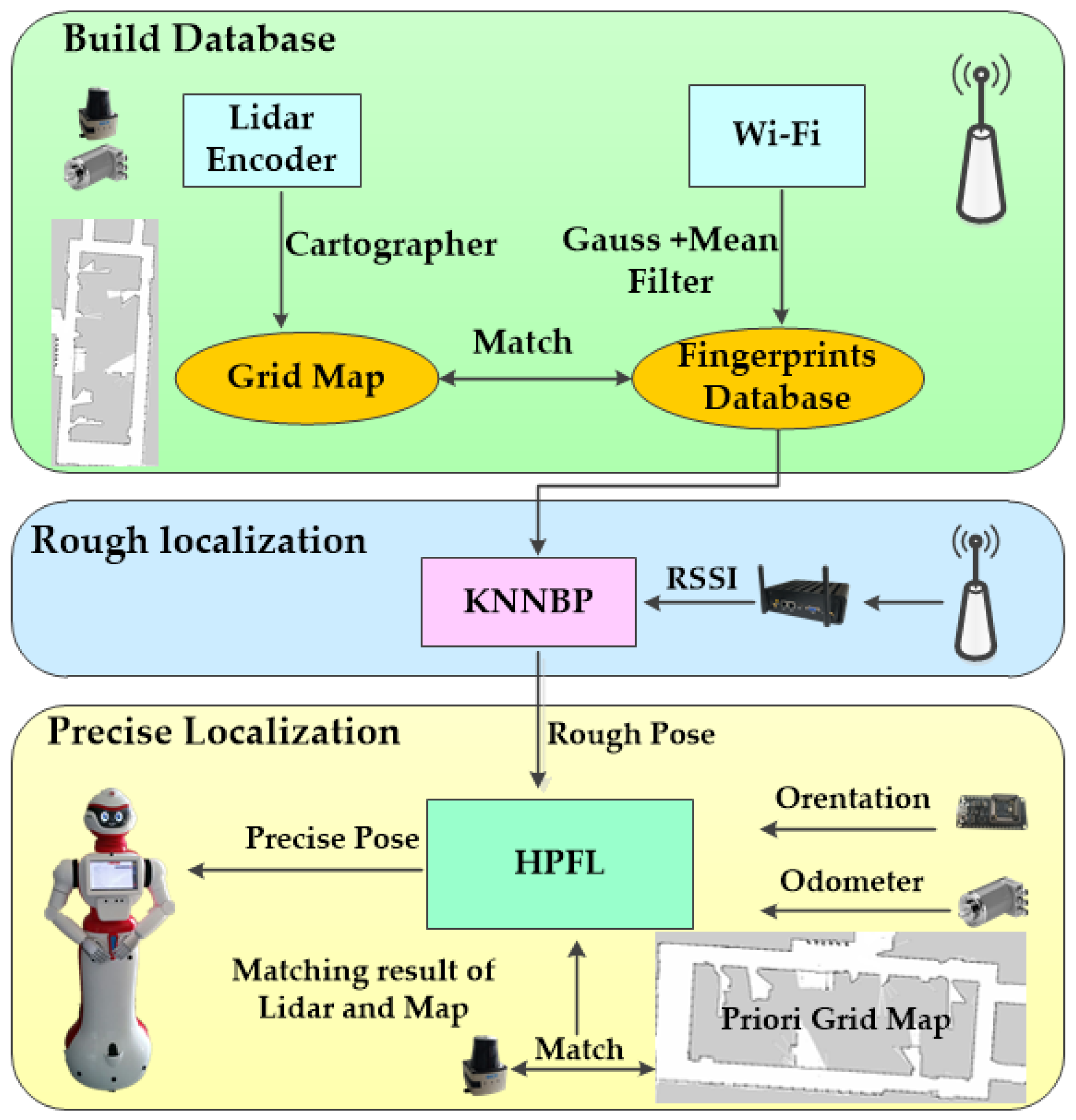
2.1. System Overview
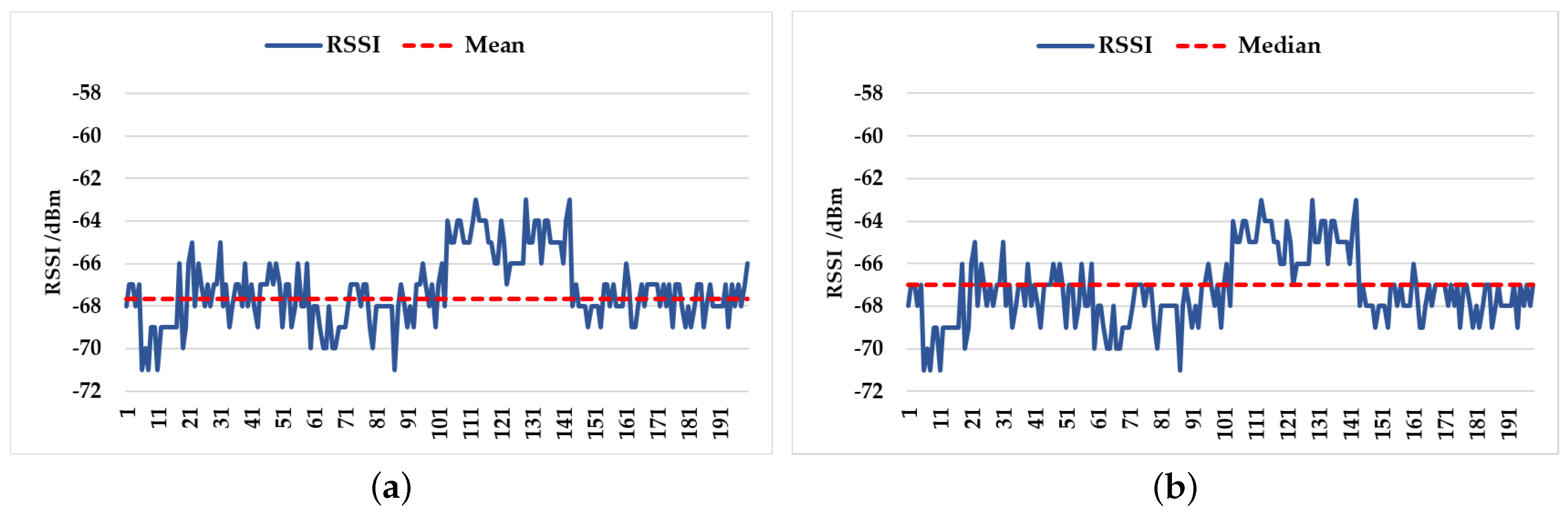
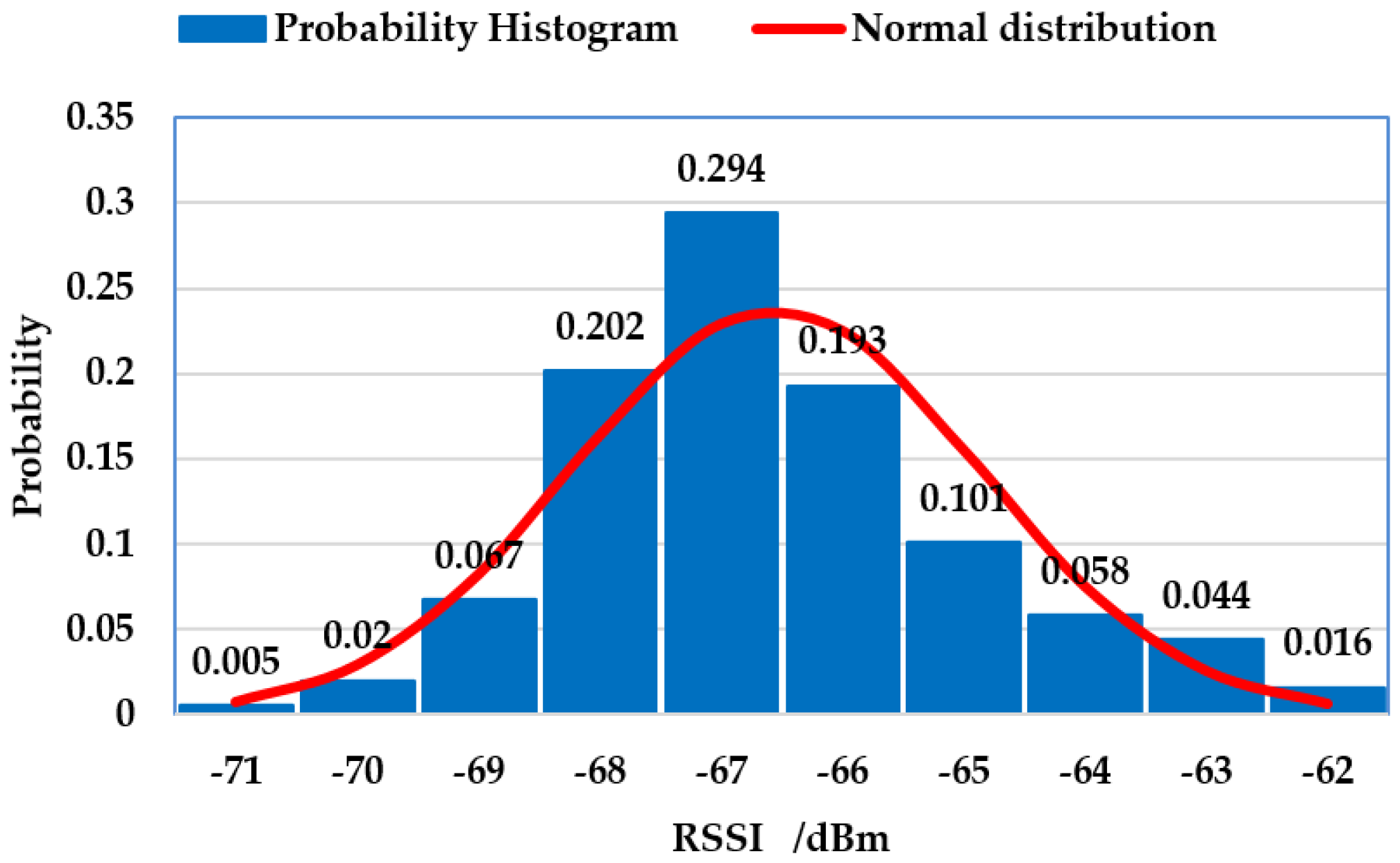
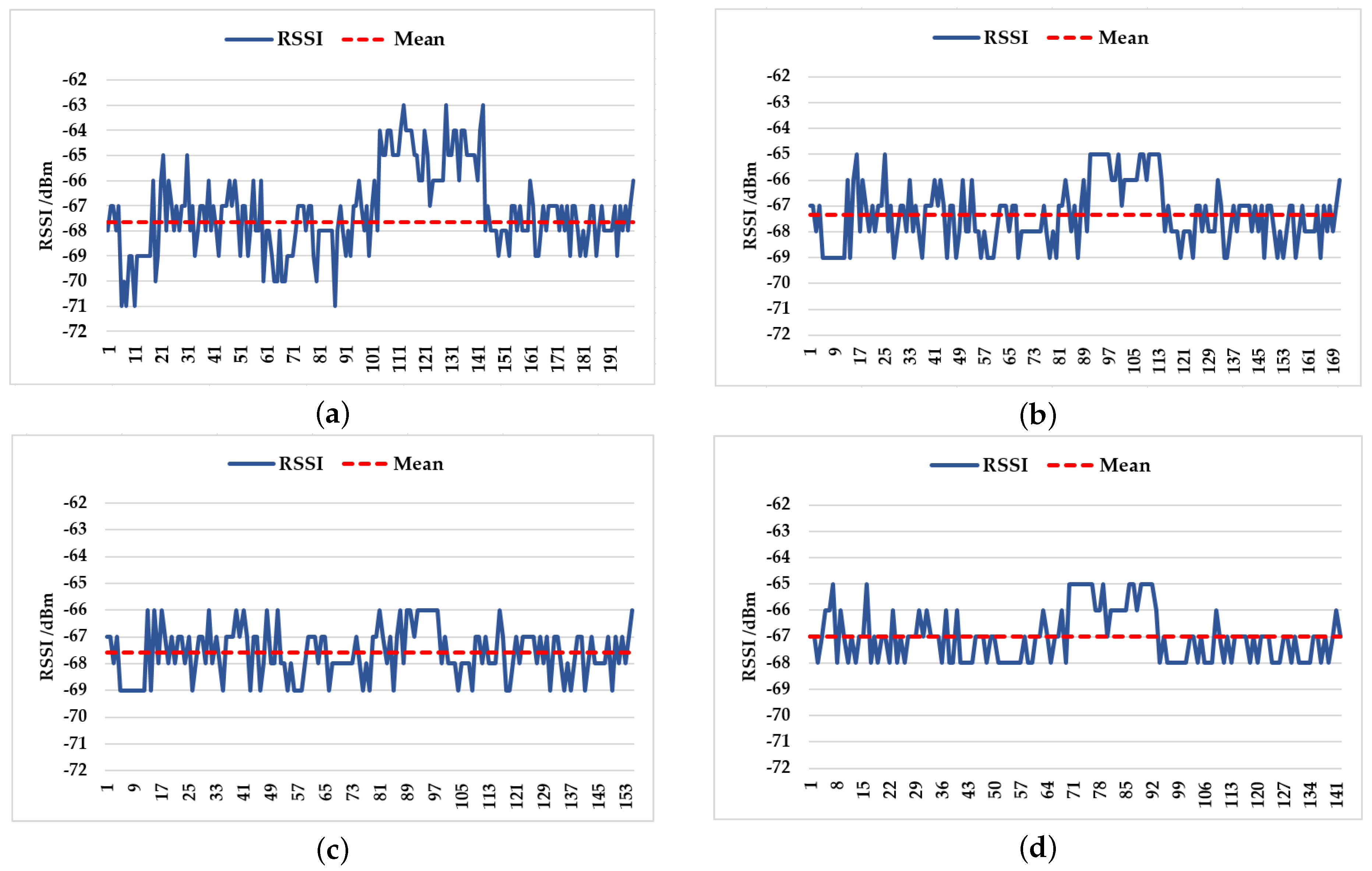
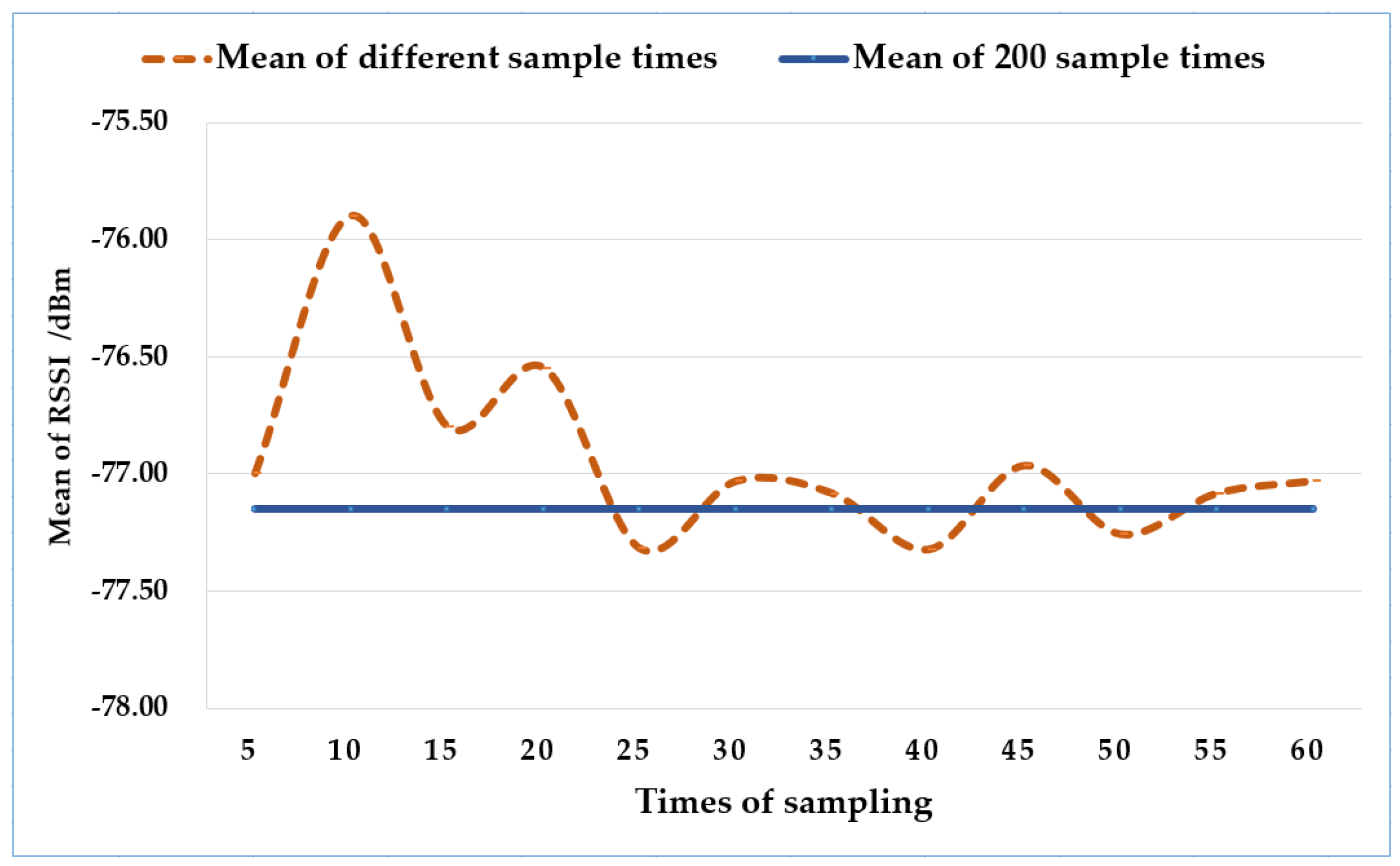
2.2. Building the Fingerprint Database
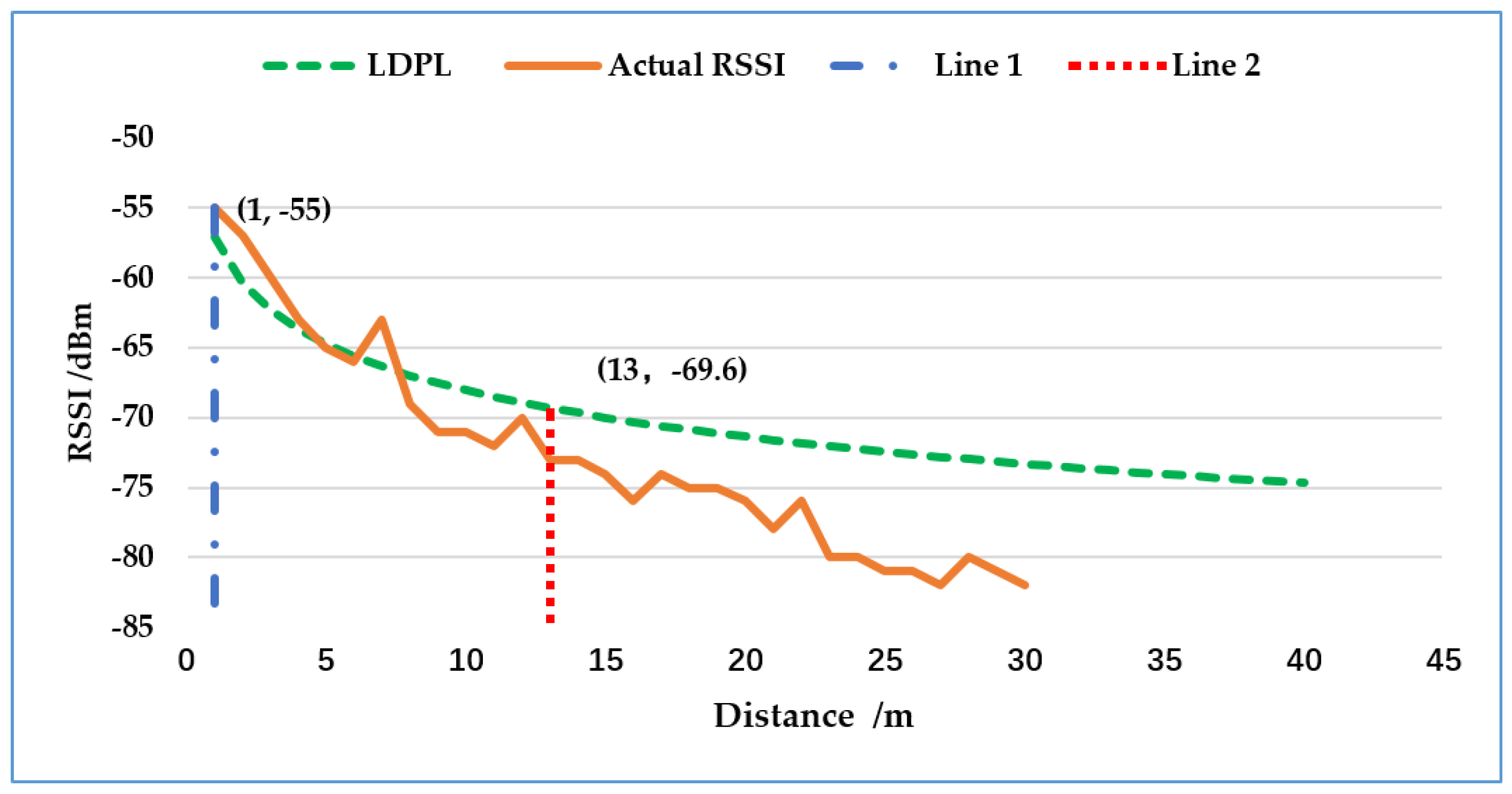
2.3. Rough Localization
| Algorithm 1 KNNBP. | |
| Input: FD = | |
| F = (F FD) | |
| F = | |
| 1: | forj = 1 to n do |
| 2: | for i = 1 to m do |
| 3: | if ma = MA then |
| 4: | if | − | < V then |
| 5: | = 1 − |
| 6: | end if |
| 7: | end if |
| 8: | end for |
| 9: | = |
| 10: | end for |
| 11: | sort from largest to smallest |
| 12: | select the first K positions (,) corresponding to |
| 13: | calculate position (x, y) = |
| 14: | return (x, y) |
2.4. Precise Localization Based on HPFL
| Algorithm 2 HPFL. | |
| Input: particle set of last time , orientation information c(θ), rough position wifi(x,y), | |
| sensor observation , measurement module , grid map m | |
| Initilization: current particle set , number of current particles M = 0, | |
| max number of particles = 0, max weight of M particles = 0 | |
| the threshold of particle weight | |
| 1: | whiledo |
| 2: | draw i with probability # Particles are extracted from the particle set at time 1 |
| 3: | if (global_flag) then # If global localization is required |
| 4: | + N # Predict orientation of particles according to compass |
| 5: | + N # Predict position of particles according to Wi-Fi |
| 6: | else |
| 7: | = sample_motion(,) + N) |
| # Predict position of particles according to encoder | |
| 8: | end if |
| 9: | = measurement # Update weights of particles |
| 10: | # Update particle set based on Importance Re-sampling |
| 11: | calculate according to KLD_sampling |
| 12: | mark the particles located in obstacles and filter them |
| 13: | M = M + 1 |
| 14: | end while |
| 15: | select the K positions in according to the largest K weight |
| 16: | return |
3. Experiments and Results
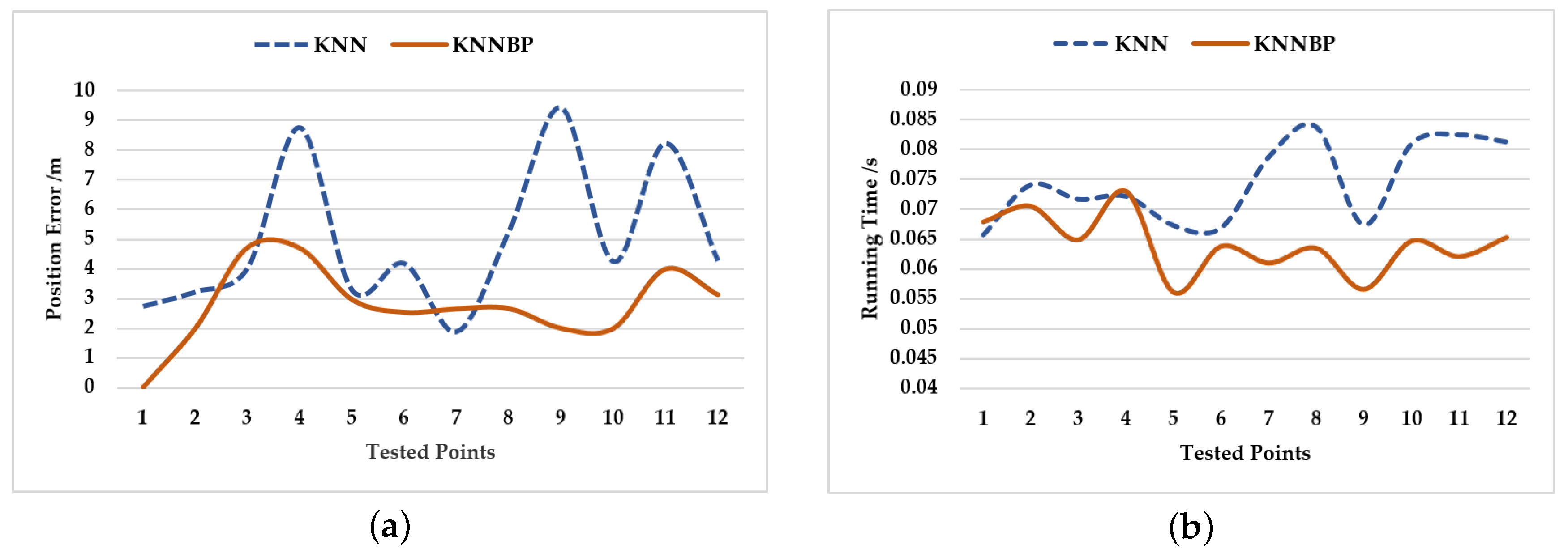
3.1. Rough Localization
3.2. Precise Localization
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yi, D.H.; Lee, T.J.; Cho, D.D. A New Localization System for Indoor Service Robots in Low Luminance and Slippery Indoor Environment Using Afocal Optical Flow Sensor Based Sensor Fusion. Sensors 2018, 18, 171. [Google Scholar] [CrossRef] [PubMed]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.H.; Ra, W.-S.; Park, S.-Y.; Park, J.B. Robust Least Squares Approach to Passive Target Localization Using Ultrasonic Receiver Array. IEEE Trans. Ind. Electron. 2013, 61, 1993–2002. [Google Scholar] [CrossRef]
- Yang, P.; Wu, W. Efficient Particle Filter Localization Algorithm in Dense Passive RFID Tag Environment. IEEE Trans. Ind. Electron. 2014, 61, 5641–5651. [Google Scholar] [CrossRef]
- Li, Q.; Li, W.; Sun, W.; Li, J.; Liu, Z. Fingerprint and Assistant Nodes Based Wi-Fi Localization in Complex Indoor Environment. IEEE Access 2017, 4, 2993–3004. [Google Scholar] [CrossRef]
- Blanco, J.L.; Galindo, C.; Ortiz-De-Galisteo, A.; Moreno, F.A. Mobile robot localization based on Ultra-Wide-Band ranging: A particle filter approach. Robot. Auton. Syst. 2009, 57, 496–507. [Google Scholar] [Green Version]
- Wu, T.; Liu, J.; Li, Z.; Liu, K.; Xu, B. Accurate Smartphone Indoor Visual Positioning Based on a High-Precision 3D Photorealistic Map. Sensors 2018, 18, 1974. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.-T.; Peng, C.-C.; Ravankar, A.A.; Ravankar, A. A Single LiDAR-Based Feature Fusion Indoor Localization Algorithm. Sensors 2018, 18, 1294. [Google Scholar] [CrossRef] [PubMed]
- Borenstein, J.; Koren, Y. The vector field histogram-fast obstacle avoidance for mobile robots. IEEE Trans. Robot. Autom. 2002, 7, 278–288. [Google Scholar] [CrossRef]
- Burgard, W.; Fox, D.; Hennig, D.; Schmidt, T. Estimating the absolute position of a mobile robot using position probability grids. In Proceedings of the Thirteenth National Conference on Artificial Intelligence, Portland, OR, USA, 4–8 August 1996; pp. 896–901. [Google Scholar]
- Thrun, S.; Dieter, F. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005; pp. 250–263. [Google Scholar]
- Lei, Z. Self-adaptive Monte Carlo localization for mobile robots using range finders. Robotica 2012, 30, 229–244. [Google Scholar]
- Dellaert, F.; Fox, D.; Burgard, W.; Thrun, S. Monte Carlo localization for mobile robots. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; Volume 2, pp. 1322–1328. [Google Scholar]
- Fox, D. KLD-Sampling: Adaptive particle filters. Adv. Neural Inf. Process. Syst. 2002, 14, 713–720. [Google Scholar]
- Blanco, J.L.; González, J.; Fernandez-Madrigal, J.A. Optimal Filtering for Non-parametric Observation Models: Applications to Localization and SLAM. Int. J. Robot. Res. 2012, 29, 1726–1742. [Google Scholar] [CrossRef]
- Thrun, S.; Fox, D.; Burgard, W. Monte Carlo Localization with Mixture Proposal Distribution. In Proceedings of the Seventeenth National Conference on Artificial Intelligence and Twelfth Conference on Innovative Applications of Artificial Intelligence, Pittsburgh, PA, USA, 30 July–3 August 2000; pp. 859–865. [Google Scholar]
- He, X.; Aloi, D.N.; Li, J. Probabilistic Multi-Sensor Fusion Based Indoor Positioning System on a Mobile Device. Sensors 2015, 15, 31464–31481. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Coltin, B.; Veloso, M. Multi-observation sensor resetting localization with ambiguous landmarks. Auton. Robots 2013, 35, 221–237. [Google Scholar] [CrossRef] [Green Version]
- Pérez, L.; Íñigo, R.; Rodríguez, N.; Usamentiaga, R.; García, D.F. Robot Guidance Using Machine Vision Techniques in Industrial Environments: A Comparative Review. Sensors 2016, 16, 335. [Google Scholar] [CrossRef] [PubMed]
- Choi, B.S.; Lee, J.W.; Lee, J.J.; Park, K.T. A Hierarchical Algorithm for Indoor Mobile Robot Localization Using RFID Sensor Fusion. IEEE Trans. Ind. Electron. 2011, 58, 2226–2235. [Google Scholar] [CrossRef]
- Biswas, J.; Veloso, M. Depth camera based indoor mobile robot localization and navigation. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; Volume 44, pp. 1697–1702. [Google Scholar]
- Luca, D.G.; Alberto, M. Towards accurate indoor localization using ibeacons, fingerprinting and particle filtering. In Proceedings of the 2016 International Conference on IndoorPositioning and Indoor Navigation (IPIN), Madrid, Spain, 4–7 October 2016. [Google Scholar]
- Canedo-Rodríguez, A.; Álvarez-Santos, V.; Regueiro, C.V.; Iglesias, R.; Barro, S.; Presedo, J. Particle filter robot localisation through robust fusion of laser, WiFi, compass, and a network of external cameras. Inf. Fusion 2016, 27, 170–188. [Google Scholar] [CrossRef]
- Biswas, J.; Veloso, M. WiFi localization and navigation for autonomous indoor mobile robots. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 4379–4384. [Google Scholar]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar]
- Cabrera-Mora, F.; Xiao, J. Preprocessing technique to signal strength data of wireless sensor network for real-time distance estimation. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1537–1542. [Google Scholar]
- Subhan, F.; Ahmed, S.; Ashraf, K. Extended Gradient Predictor and Filter for smoothing RSSI. Sensors 2014, 14, 1198–1202. [Google Scholar]
- Zhu, H.; Alsharari, T. An Improved RSSI-Based Positioning Method Using Sector Transmission Model and Distance Optimization Technique. Sensors 2018, 18, 171. [Google Scholar] [CrossRef]
- Li, D.; Zhang, B.; Li, C. A Feature-Scaling-Based k-Nearest Neighbor Algorithm for Indoor Positioning Systems. IEEE Internet Things J. 2016, 4, 590–597. [Google Scholar] [CrossRef]
- Alshami, I.H.; Ahmad, N.A.; Sahibuddin, S.; Firdaus, F. Adaptive Indoor Positioning Model Based on WLAN-Fingerprinting for Dynamic and Multi-Floor Environments. Sensors 2017, 17, 1789. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.; Wang, Y.; Nallanathan, A.; Wang, L. An Improved K-Nearest-Neighbor Indoor Localization Method Based on Spearman Distance. IEEE Signal Process. Lett. 2016, 23, 351–355. [Google Scholar] [CrossRef] [Green Version]
- Chapre, Y.; Mohapatra, P.; Jha, S.; Seneviratne, A. Received signal strength indicator and its analysis in a typical WLAN system (short paper). In Proceedings of the 2013 IEEE Conference on Local Computer Networks, Sydney, Australia, 21–24 October 2013; pp. 304–307. [Google Scholar]
- Li, Z.; Braun, T. Passively track wifi users with an enhanced particle filter using power-based ranging. IEEE Trans. Wirel. Commun. 2017, 16, 7305–7318. [Google Scholar] [CrossRef]
- Chang, Q.; Li, Q.; Shi, Z.; Chen, W.; Wang, W. Scalable indoor localization via mobile crowdsourcing and gaussian process. Sensors 2016, 16, 381. [Google Scholar] [CrossRef] [PubMed]
- Ghirmai, T. Distributed particle filter for target tracking: With reduced sensor communications. Sensors 2016, 16, 1454. [Google Scholar] [CrossRef] [PubMed]
- Doucet, A.; Johansen, A.M. A tutorial on particle filtering and smoothing: Fifteen years later. Handb. Nonlinear Filter. 2011, 12, 656–704. [Google Scholar]
- Malarvezhi, P.; Kumar, R. A diversity enhanced particle filter for carrier frequency offset estimation in nonlinear OFDM system. Wirel. Pers. Commun. 2016, 89, 15–26. [Google Scholar] [CrossRef]
- Honkavirta, V. Location Fingerprinting Methods in Wireless Local Area Networks. Master’s Thesis, Tampere University of Technology, Tampere, Finland, 2008; pp. 22–23. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (, ) | (, ) | (, ) | … | (, ) | |
|---|---|---|---|---|---|
| MAC | … | ||||
| MAC | … | ||||
| … | … | … | … | … | … |
| MAC | … |
| Evaluation (m) | KNN | KNNBP |
|---|---|---|
| AE | 4.95 | 2.6 |
| ME | 9.43 | 4.73 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Zhang, W.; Yao, Z.; Li, M.; Liang, Z.; Cao, Z.; Zhang, H.; Huang, Q. Design of a Hybrid Indoor Location System Based on Multi-Sensor Fusion for Robot Navigation. Sensors 2018, 18, 3581. https://0-doi-org.brum.beds.ac.uk/10.3390/s18103581
Shi Y, Zhang W, Yao Z, Li M, Liang Z, Cao Z, Zhang H, Huang Q. Design of a Hybrid Indoor Location System Based on Multi-Sensor Fusion for Robot Navigation. Sensors. 2018; 18(10):3581. https://0-doi-org.brum.beds.ac.uk/10.3390/s18103581
Chicago/Turabian StyleShi, Yongliang, Weimin Zhang, Zhuo Yao, Mingzhu Li, Zhenshuo Liang, Zhongzhong Cao, Hua Zhang, and Qiang Huang. 2018. "Design of a Hybrid Indoor Location System Based on Multi-Sensor Fusion for Robot Navigation" Sensors 18, no. 10: 3581. https://0-doi-org.brum.beds.ac.uk/10.3390/s18103581