A Vehicular Mobile Standard Instrument for Field Verification of Traffic Speed Meters Based on Dual-Antenna Doppler Radar Sensor


Abstract
:1. Introduction
2. Traditional Standard Instruments
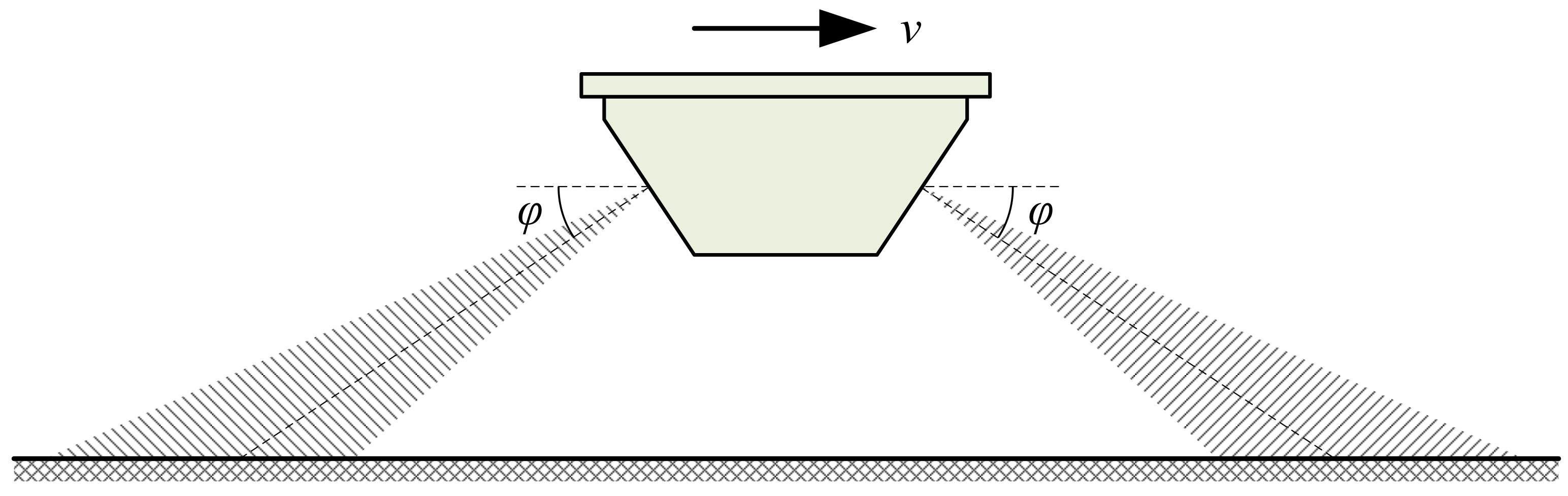
3. The Speed-Measuring Principle
3.1. The SDRS
3.2. The DDRS
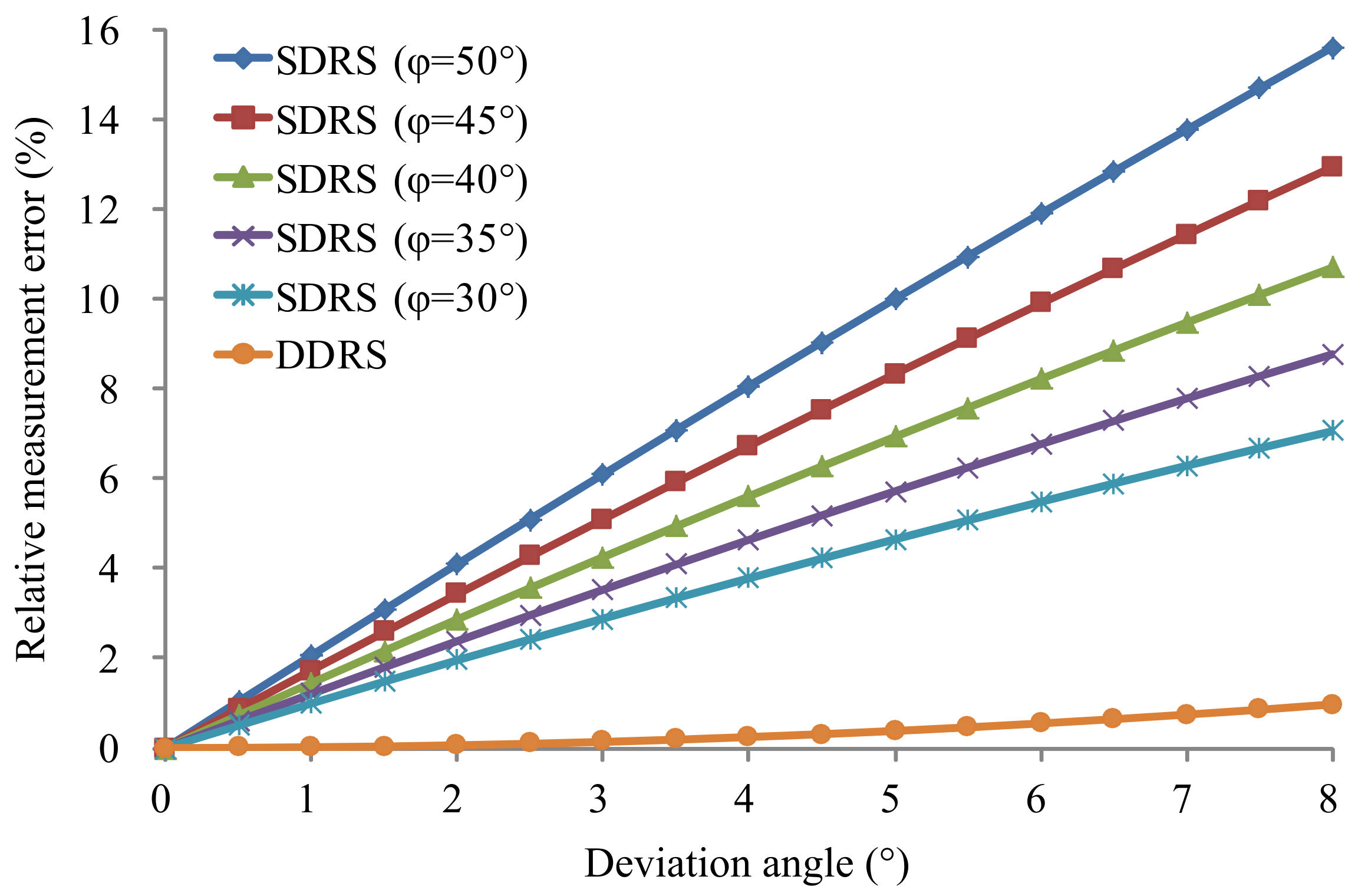
3.3. Numerical Comparison
4. Calibration Methods
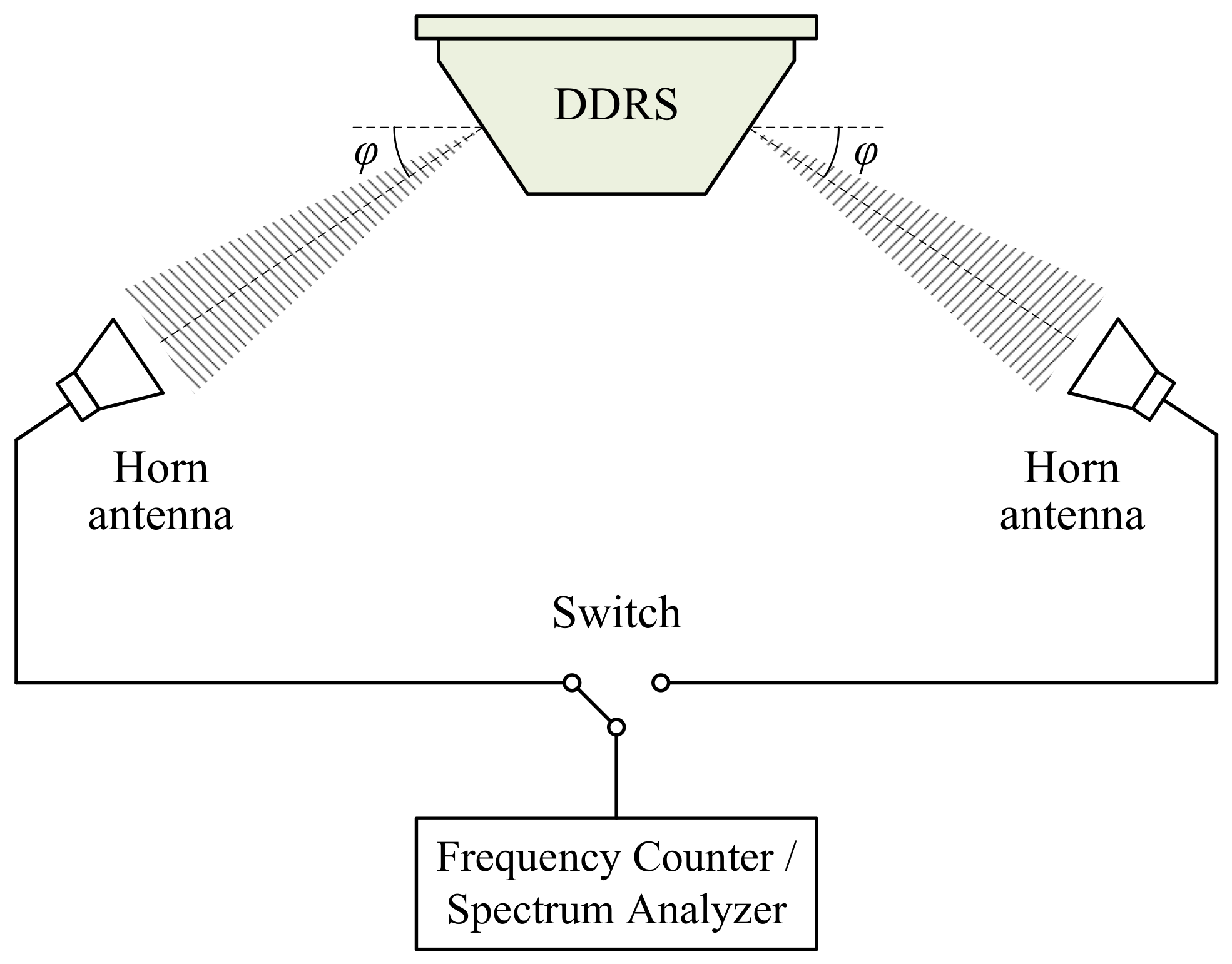
4.1. Emitted Frequency Measurement
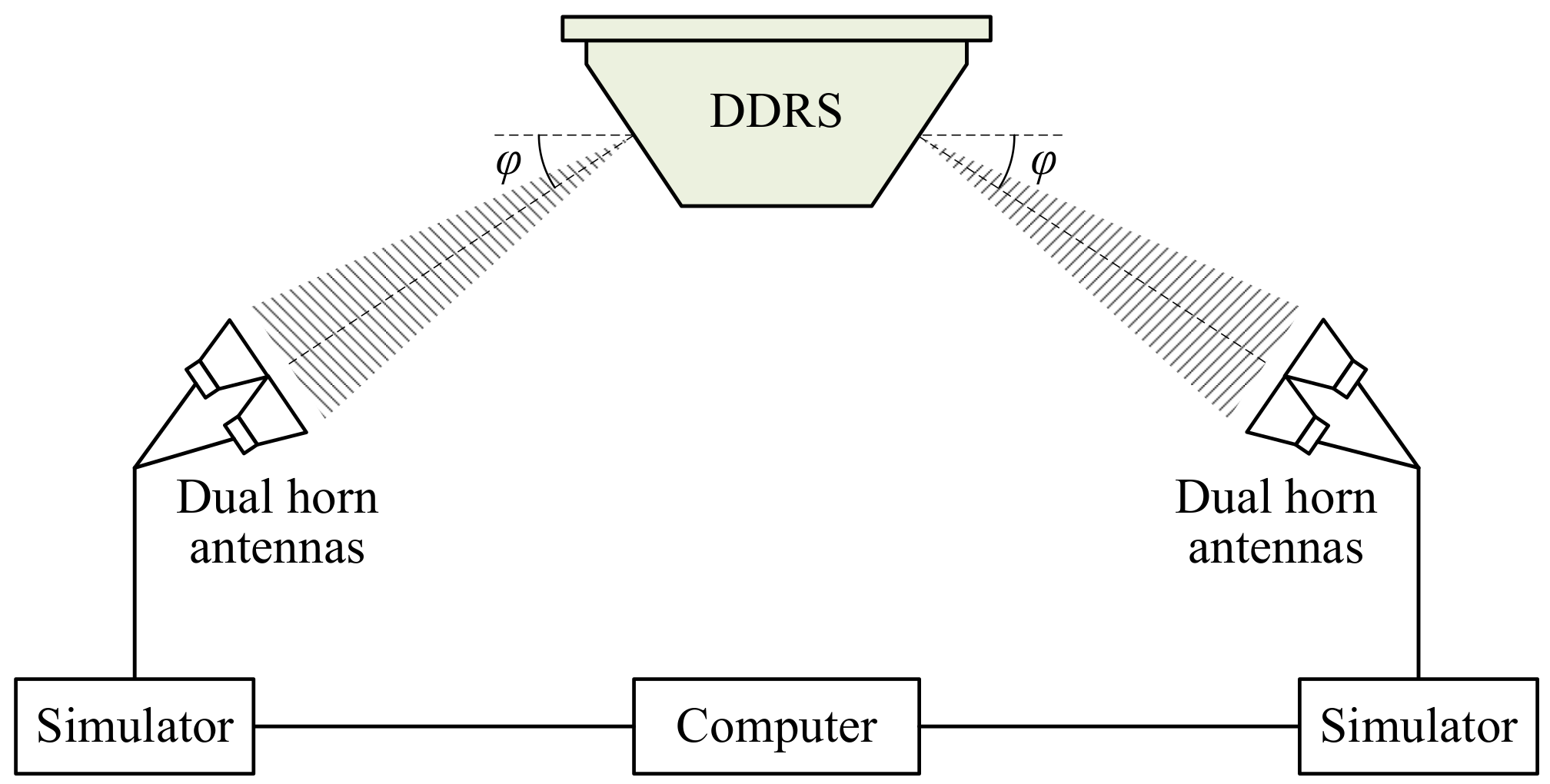
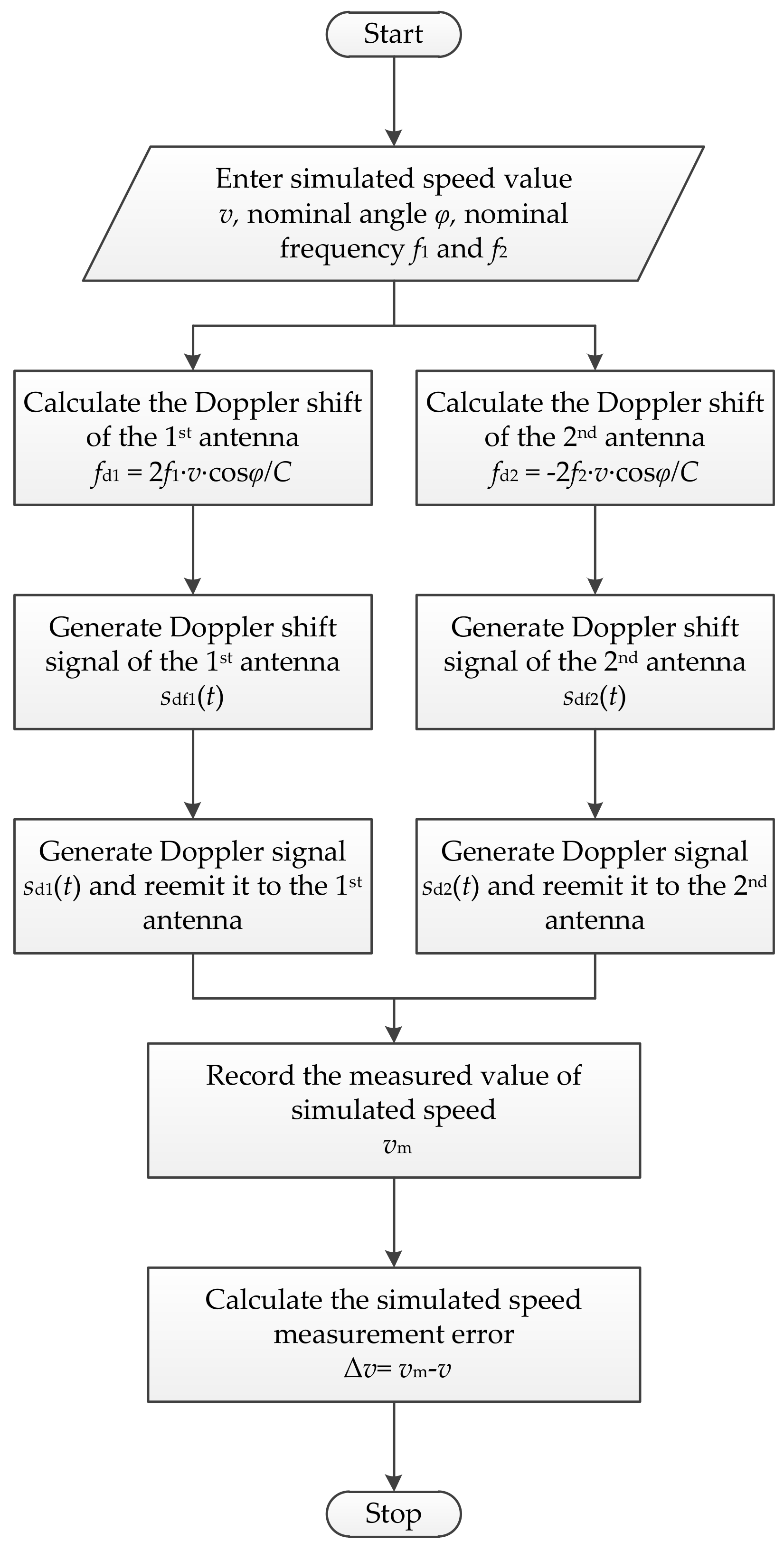
4.2. Doppler Shift Simulation
5. Realization and Experimental Results
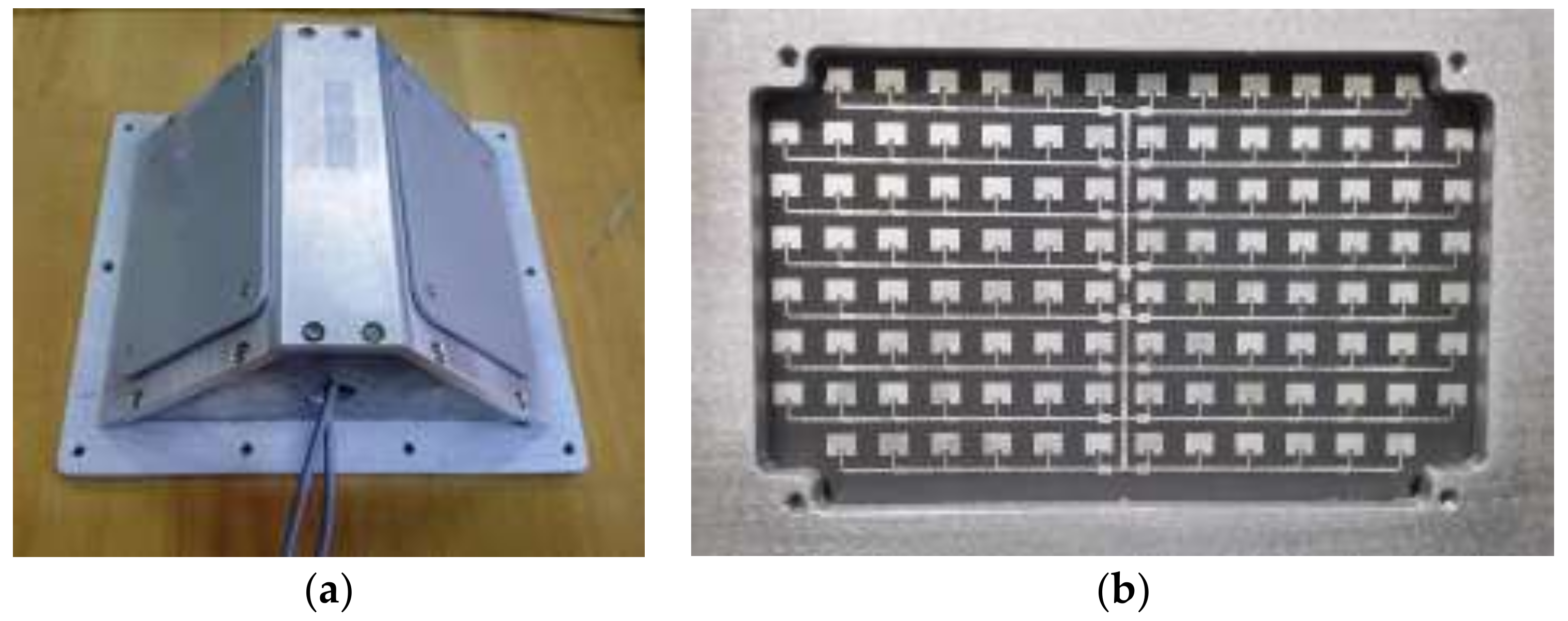
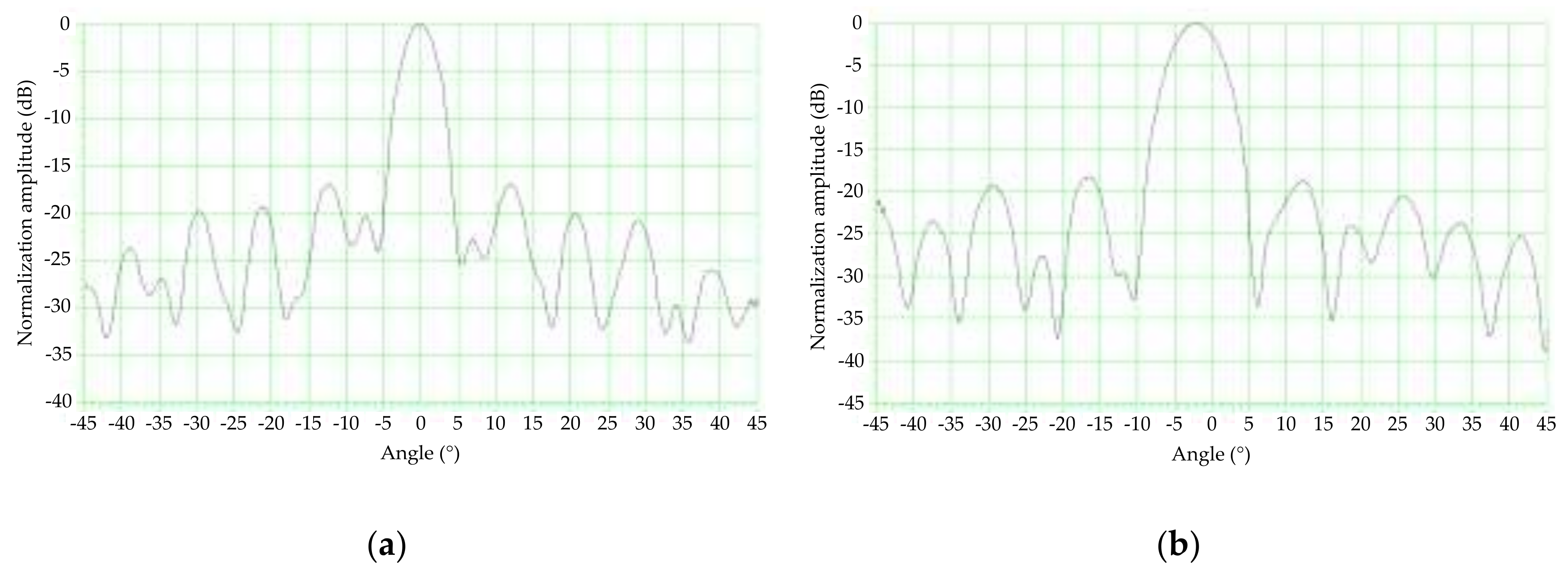
5.1. Principle Prototype of the DDRS
5.2. Doppler Shift Calibration Results
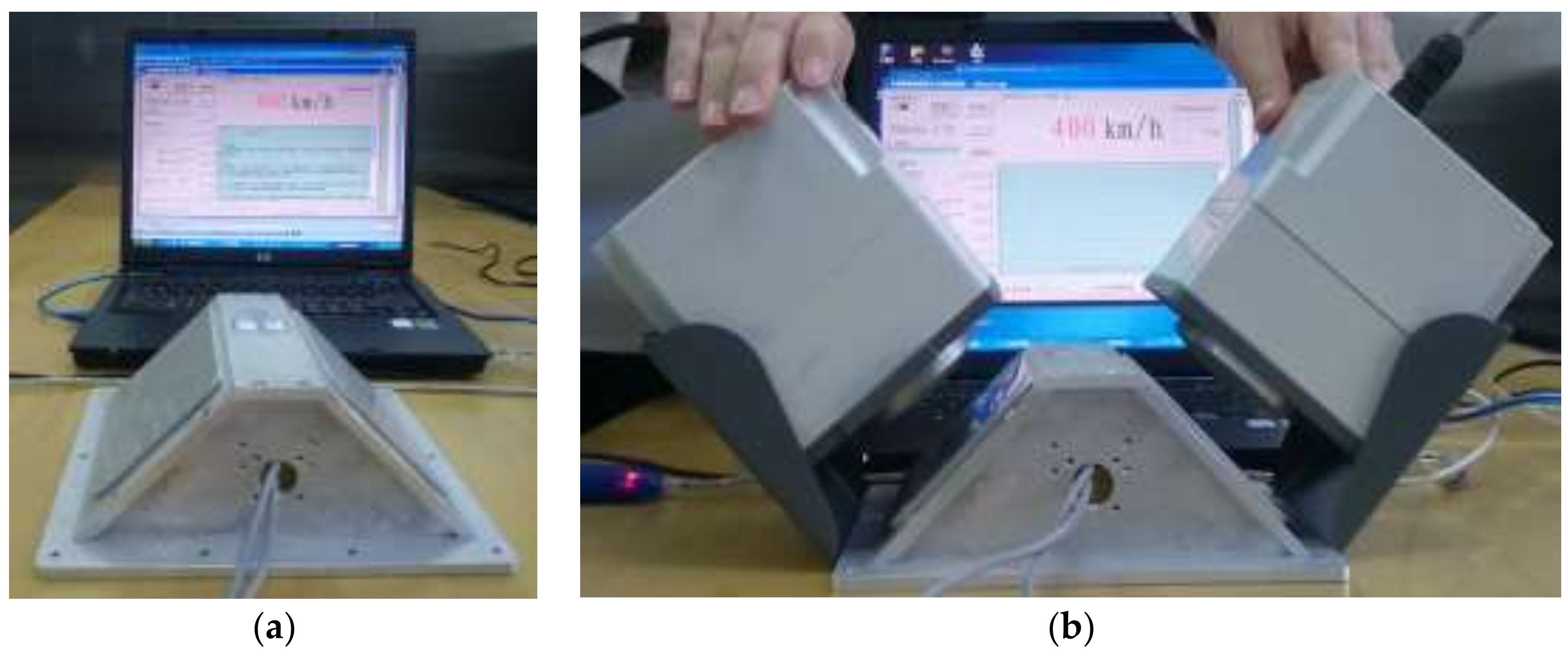
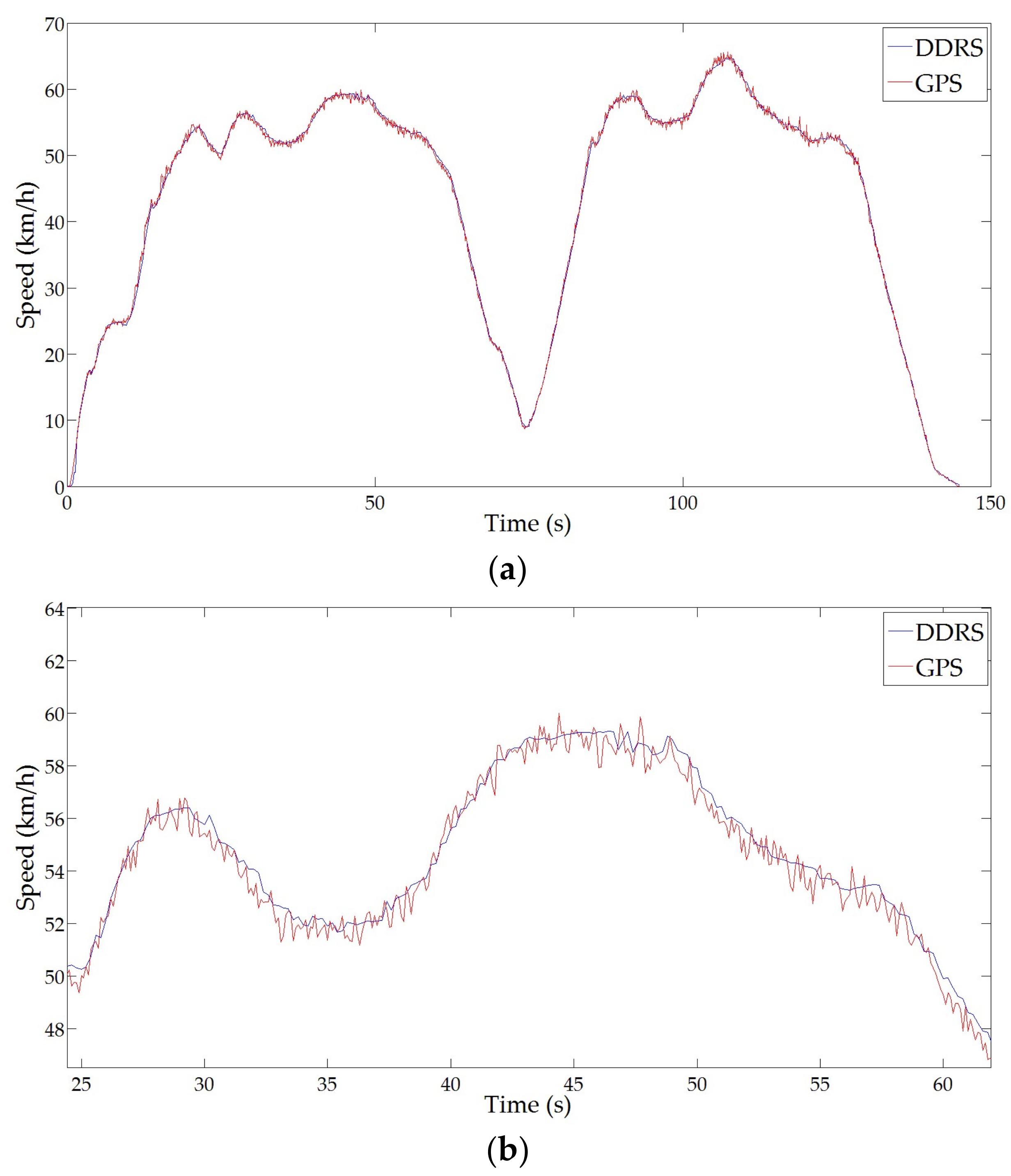
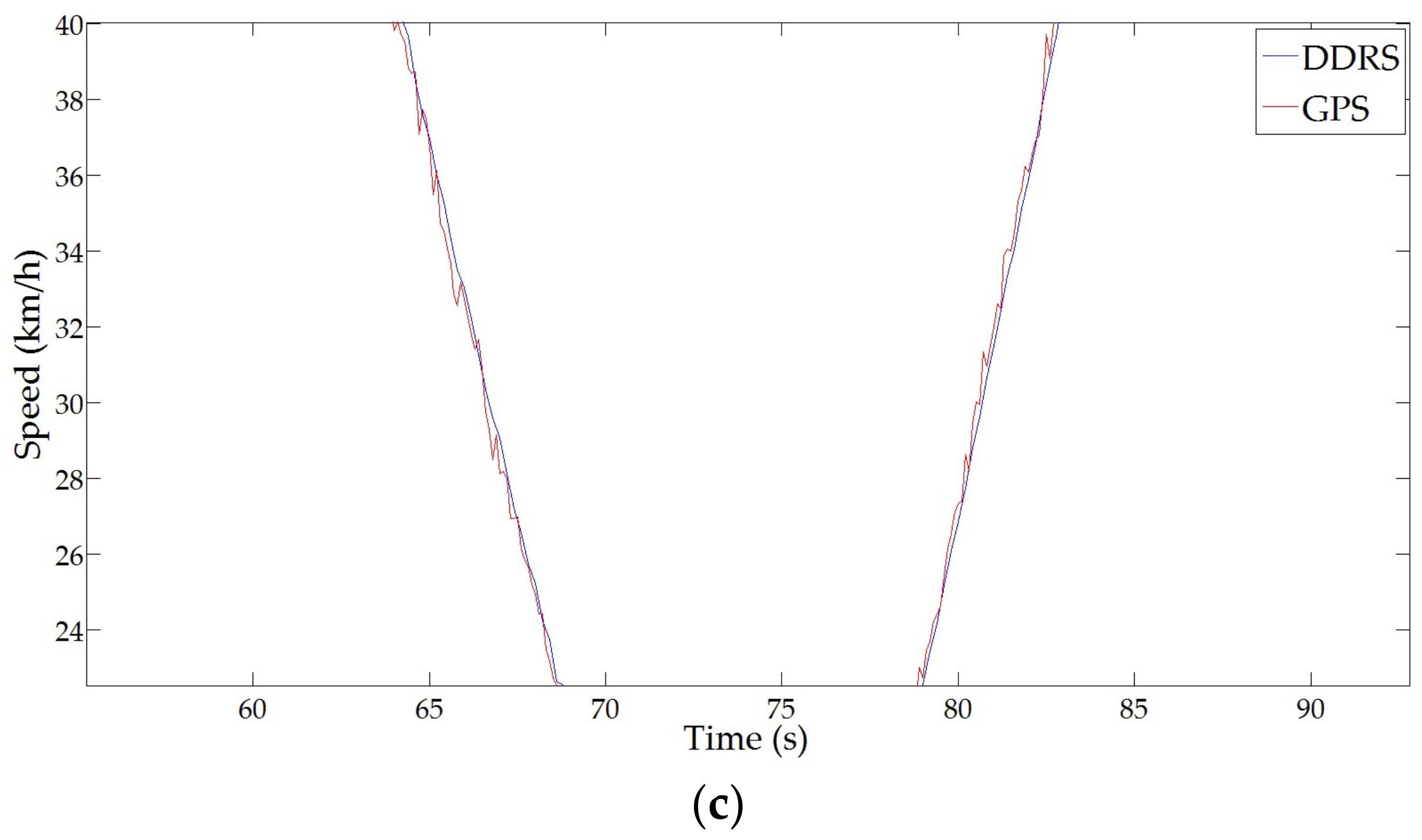
5.3. Field Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jiménez, F.; Naranjo, J.E.; Serradilla, F.; Pérez, E.; Hernández, M.J.; Ruiz, T.; Anaya, J.J.; Díaz, A. Intravehicular, Short- and Long-Range Communication Information Fusion for Providing Safe Speed Warnings. Sensors 2016, 16, 131. [Google Scholar] [CrossRef] [PubMed]
- Aparicio, F.; Páez, J.; Moreno, F.; Jiménez, F.; López, A. Discussion of a new adaptive speed control system incorporating the geometric characteristics of the roadway. Int. J. Veh. Auton. Syst. 2005, 3, 47–64. [Google Scholar] [CrossRef]
- Ye, Z.J.; Wang, L.B.; Xu, W.; Gao, Z.F.; Yan, G.N. Monitoring Traffic Information with a Developed Acceleration Sensing Node. Sensors 2017, 17, 2817. [Google Scholar] [CrossRef] [PubMed]
- Serna, C.G.; Ruichek, Y. Dynamic Speed Adaptation for Path Tracking Based on Curvature Information and Speed Limits. Sensors 2017, 17, 1383. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Xu, J.; Huang, Z.; Zhang, X.; Xia, X.G.; Long, T.; Bao, Q. Road-Aided Ground Slowly Moving Target 2D Motion Estimation for Single-Channel Synthetic Aperture Radar. Sensors 2016, 16, 383. [Google Scholar] [CrossRef] [PubMed]
- Felguera-Martin, D.; Gonzalez-Partida, J.T.; Almorox-Gonzalez, P.; Burgos-García, M. Vehicular Traffic Surveillance and Road Lane Detection Using Radar Interferometry. IEEE Trans. Veh. Technol. 2012, 61, 959–970. [Google Scholar] [CrossRef] [Green Version]
- Suchandt, S.; Runge, H.; Breit, H.; Steinbrecher, U.; Kotenkov, A.; Balss, U. Automatic extraction of traffic flows using TerraSAR-X alongtrack interferometry. IEEE Trans. Geosci. Remote Sens. 2010, 48, 807–819. [Google Scholar] [CrossRef]
- Du, L.; Sun, Q.; Cai, C.Q.; Zhang, Y.; Hu, H.B. Verification methods and antenna horizontal beamwidth of across-the-road radar for traffic speed enforcement in China. Measurement 2013, 46, 1512–1520. [Google Scholar] [CrossRef]
- Du, L.; Sun, Q.; Cai, C.Q.; Zhang, Y.; Hu, H.B. Antenna Beamwidths of Above-The-Road Radar for Traffic Speed Enforcement in China. Int. J. Antennas Propag. 2012, 2012, 492326. [Google Scholar] [CrossRef]
- Du, L.; Sun, Q.; Cai, C.Q.; Zhang, Y.; Hu, H.B. Standard equipment for pattern approval field test of vehicle speed-measuring devices for traffic law enforcement in China. In Proceedings of the Eighth International Symposium on Precision Engineering Measurements and Instrumentation (ISPEMI), Chengdu, China, 8–11 August 2012. [Google Scholar]
- Jendzurski, J.; Paulter, N.G. Calibration of Speed Enforcement Down-The-Road Radars. J. Res. Natl. Inst. Stand. Technol. 2009, 114, 137–148. [Google Scholar] [CrossRef] [PubMed]
- Bai, Y.; Sun, Q.; Du, L.; Yu, M.; Bai, J. Two laboratory methods for the calibration of GPS speed meters. Meas. Sci. Technol. 2015, 26, 015005. [Google Scholar] [CrossRef]
- Gao, Y.B.; Liu, S.F.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR Integrated Navigation System for Urban and Indoor Environments Using Hybrid Scan Matching Algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Deng, Z.; Yin, G. An Accurate GPS-IMU/DR Data Fusion Method for Driverless Car Based on a Set of Predictive Models and Grid Constraints. Sensors 2016, 16, 280. [Google Scholar] [CrossRef] [PubMed]
- Alessandroni, G.; Carini, A.; Lattanzi, E.; Freschi, V.; Bogliolo, A. A Study on the Influence of Speed on Road Roughness Sensing: The SmartRoadSense Case. Sensors 2017, 17, 305. [Google Scholar] [CrossRef] [PubMed]
- Cooper, K.B.; Durden, S.L.; Cochrane, C.J.; Monje, R.R.; Dengler, R.J.; Baldi, C. Using FMCW Doppler Radar to Detect Targets up to the Maximum Unambiguous Range. IEEE Geosci. Remote Sens. Lett. 2017, 14, 339–343. [Google Scholar] [CrossRef]
- Weil, C.; Camell, D.; Novotny, D.; Johnk, R. Across-the-road photo traffic radars: New calibration techniques. In Proceedings of the 15th International Conference on Microwaves, Radar and Wireless Communications, Warsaw, Poland, 17–19 May 2004. [Google Scholar]
- Munoz-Ferreras, J.; Calvo-Gallego, J.; Perez-Martinez, F. Monitoring road traffic with a high resolution LFMCW radar. In Proceedings of the IEEE Radar Conference, Rome, Italy, 26–30 May 2008. [Google Scholar]
- Munoz-Ferreras, J.; Perez-Martinez, F.; Calvo-Gallego, J.; Asensio-Lopez, A.; Dorta-Naranjo, B.; del Campo, A.B. Traffic surveillance system based on a high-resolution radar. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1624–1633. [Google Scholar] [CrossRef]
- Felguera-Martín, D.; González-Partida, J.-T.; Almorox-González, P.; Burgos-García, M.; Dorta-Naranjo, B.-P. Interferometric inverse synthetic aperture radar experiment using an interferometric linear frequency modulated continuous wave millimetre-wave radar. IET Radar Sonar Navig. 2011, 5, 39–47. [Google Scholar] [CrossRef] [Green Version]
- NHTSA (National Highway Traffic Safety Administration). Speed-Measuring Device Performance Specifications: Down-The-Road Radar Module; National Highway Traffic Safety Administration: Washington, DC, USA, 2016.
- NHTSA (National Highway Traffic Safety Administration). Speed-Measuring Device Performance Specifications: Across-The-Road Radar Module; National Highway Traffic Safety Administration: Washington, DC, USA, 2007.
- International Organization of Legal Metrology. Radar Equipment for the Measurement of the Speed of Vehicles; International Recommendation R 91; International Organization of Legal Metrology: Paris, France, 1990. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
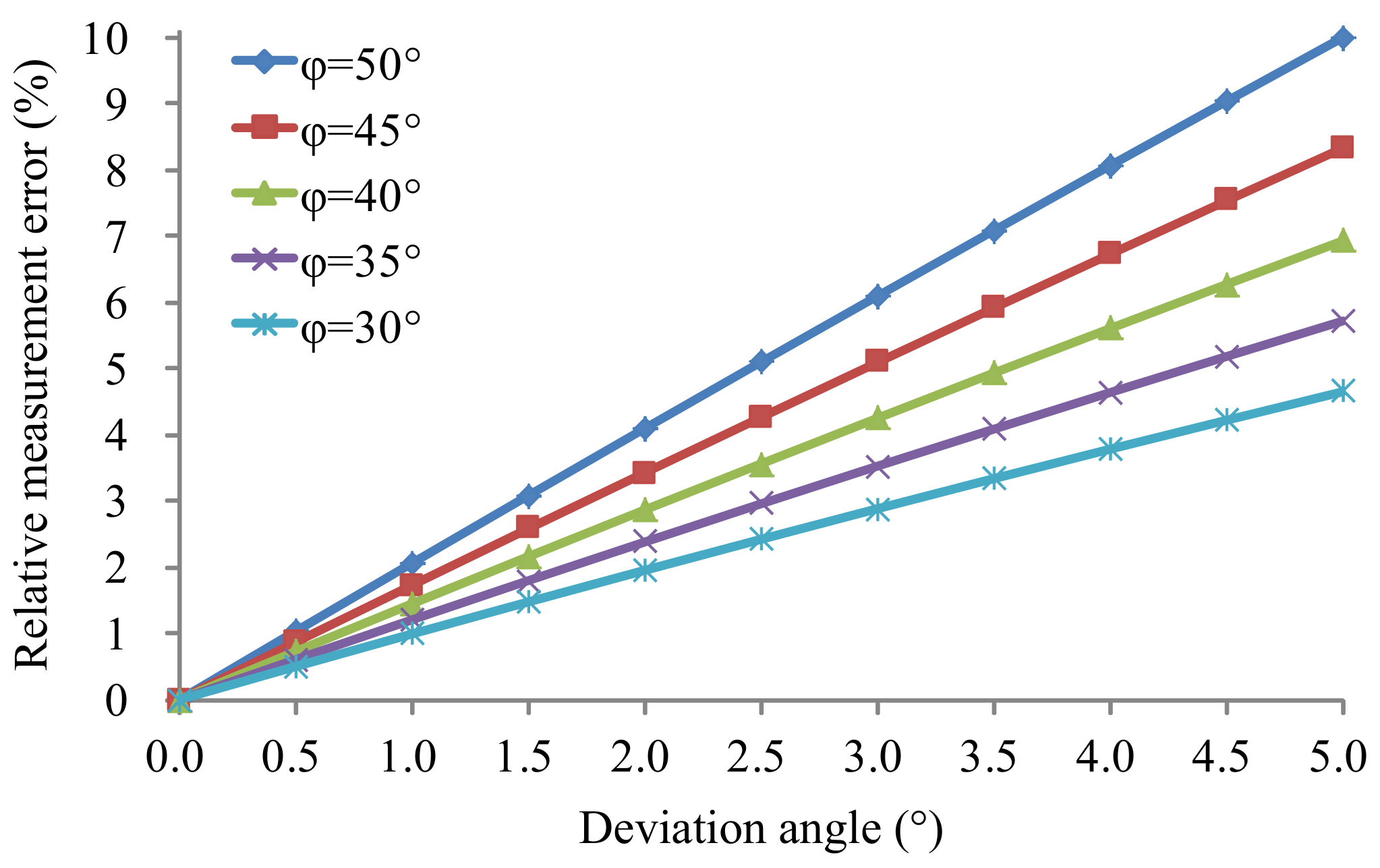
| Δφ (°) | SDRS (%) | DDRS (%) | ||||
|---|---|---|---|---|---|---|
| φ = 50° | φ = 45° | φ = 40° | φ = 35° | φ = 30° | ||
| 0 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| 0.5 | 1.04 | 0.87 | 0.73 | 0.61 | 0.50 | 0.00 |
| 1 | 2.06 | 1.73 | 1.45 | 1.21 | 0.99 | −0.02 |
| 2 | 4.10 | 3.43 | 2.87 | 2.38 | 1.95 | −0.06 |
| 3 | 6.10 | 5.10 | 4.25 | 3.53 | 2.88 | −0.14 |
| 4 | 8.07 | 6.73 | 5.61 | 4.64 | 3.78 | −0.24 |
| 5 | 10.01 | 8.34 | 6.93 | 5.72 | 4.65 | −0.38 |
| 6 | 11.91 | 9.91 | 8.22 | 6.77 | 5.49 | −0.55 |
| 7 | 13.78 | 11.44 | 9.48 | 7.79 | 6.29 | −0.75 |
| 8 | 15.61 | 12.94 | 10.70 | 8.77 | 7.06 | −0.97 |
| Parameter | Notation | Value |
|---|---|---|
| Nominal emitted frequency of the first antenna | 24,150 MHz | |
| Nominal emitted frequency of the second antenna | 24,125 MHz | |
| Nominal angle of the first antenna | 45° | |
| Nominal angle of the second antenna | 135° | |
| Vertical beamwidth of the dual antennas | / | 4.0° |
| Horizontal beamwidth of the dual antennas | / | 6.0° |
| sidelobe levels of the dual antennas | / | <−15.0 dB |
| Maximum value of speed measurement | 400 km/h | |
| Minimum value of speed measurement | 10 km/h | |
| MPE of speed measurement | ±0.25 km/h ( < 50 km/h); ±0.5% ( ≥ 50 km/h) | |
| Maximum refresh rate | / | 20 Hz |
| Parameter | Value |
|---|---|
| Maximum value of simulated emitted frequency | 24,250 MHz |
| Minimum value of simulated emitted frequency | 24,050 MHz |
| Maximum value of simulated beam pointing angle | 180° |
| Minimum value of simulated beam pointing angle | 0° |
| Maximum value of simulated speed | 400 km/h |
| Minimum value of simulated speed | 0 km/h |
| MPE of simulated speed | ±0.01 km/h |
| Intended Simulated Speed (km/h) | Independent Measurement Results (km/h) | Average Value (km/h) | Error (km/h) | ||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |||
| 10.00 | 10.0 | 10.0 | 10.0 | 10.0 | 10.0 | 10.00 | 0.00 |
| 60.00 | 60.0 | 60.0 | 59.9 | 60.0 | 60.0 | 59.98 | −0.02 |
| 100.00 | 99.9 | 100.0 | 100.0 | 100.0 | 100.0 | 99.98 | −0.02 |
| 200.00 | 199.9 | 200.0 | 200.0 | 199.9 | 200.0 | 199.96 | −0.04 |
| 300.00 | 300.0 | 299.9 | 300.0 | 299.9 | 300.0 | 299.96 | −0.04 |
| 400.00 | 399.9 | 400.0 | 399.9 | 400.0 | 399.9 | 399.94 | −0.06 |
| Deceleration | Acceleration | ||||||
|---|---|---|---|---|---|---|---|
| Time (s) | DDRS (km/h) | GPS (km/h) | Deviation (km/h) | Time (s) | DDRS (km/h) | GPS (km/h) | Deviation (km/h) |
| 59.0 | 51.5 | 51.4 | 0.1 | 75.0 | 9.1 | 9.6 | −0.5 |
| 60.0 | 49.9 | 49.3 | 0.6 | 76.0 | 11.3 | 11.4 | −0.1 |
| 61.0 | 48.6 | 47.9 | 0.7 | 77.0 | 14.5 | 14.8 | −0.3 |
| 62.0 | 47.3 | 46.8 | 0.5 | 78.0 | 18.3 | 18.5 | −0.2 |
| 63.0 | 44.6 | 44.3 | 0.3 | 79.0 | 22.6 | 22.8 | −0.2 |
| 64.0 | 40.9 | 39.8 | 1.1 | 80.0 | 26.9 | 27.3 | −0.4 |
| 65.0 | 37.0 | 36.8 | 0.2 | 81.0 | 31.5 | 32.0 | −0.5 |
| 66.0 | 33.0 | 32.7 | 0.3 | 82.0 | 35.9 | 36.1 | −0.2 |
| 67.0 | 29.1 | 28.1 | 1.0 | 83.0 | 40.7 | 41.1 | −0.4 |
| 68.0 | 25.2 | 24.9 | 0.3 | 84.0 | 45.7 | 46.7 | −1.0 |
| 69.0 | 21.7 | 21.6 | 0.1 | 85.0 | 51.0 | 52.1 | −1.1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, L.; Sun, Q.; Cai, C.; Bai, J.; Fan, Z.; Zhang, Y. A Vehicular Mobile Standard Instrument for Field Verification of Traffic Speed Meters Based on Dual-Antenna Doppler Radar Sensor. Sensors 2018, 18, 1099. https://0-doi-org.brum.beds.ac.uk/10.3390/s18041099
Du L, Sun Q, Cai C, Bai J, Fan Z, Zhang Y. A Vehicular Mobile Standard Instrument for Field Verification of Traffic Speed Meters Based on Dual-Antenna Doppler Radar Sensor. Sensors. 2018; 18(4):1099. https://0-doi-org.brum.beds.ac.uk/10.3390/s18041099
Chicago/Turabian StyleDu, Lei, Qiao Sun, Changqing Cai, Jie Bai, Zhe Fan, and Yue Zhang. 2018. "A Vehicular Mobile Standard Instrument for Field Verification of Traffic Speed Meters Based on Dual-Antenna Doppler Radar Sensor" Sensors 18, no. 4: 1099. https://0-doi-org.brum.beds.ac.uk/10.3390/s18041099