Direct Reflectance Measurements from Drones: Sensor Absolute Radiometric Calibration and System Tests for Forest Reflectance Characterization

 , , , , , ,
, , , , , ,
Abstract
:
1. Introduction
2. Materials and methods
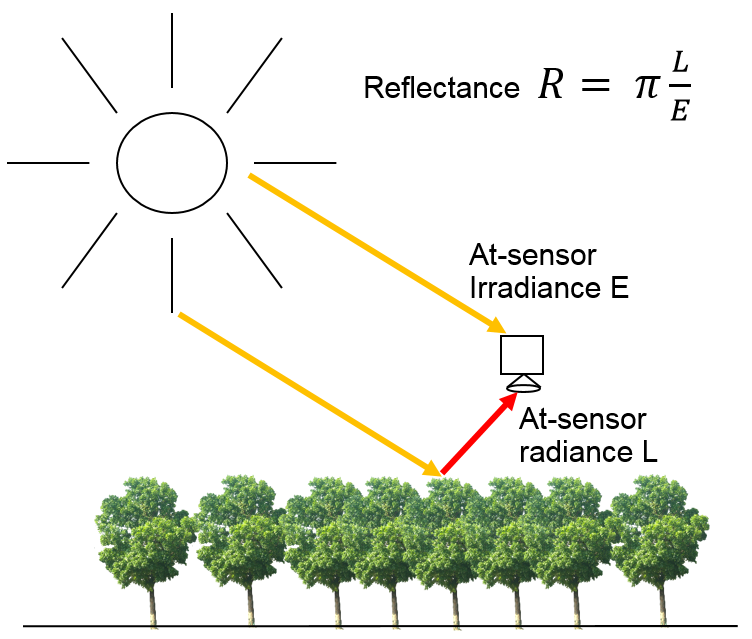
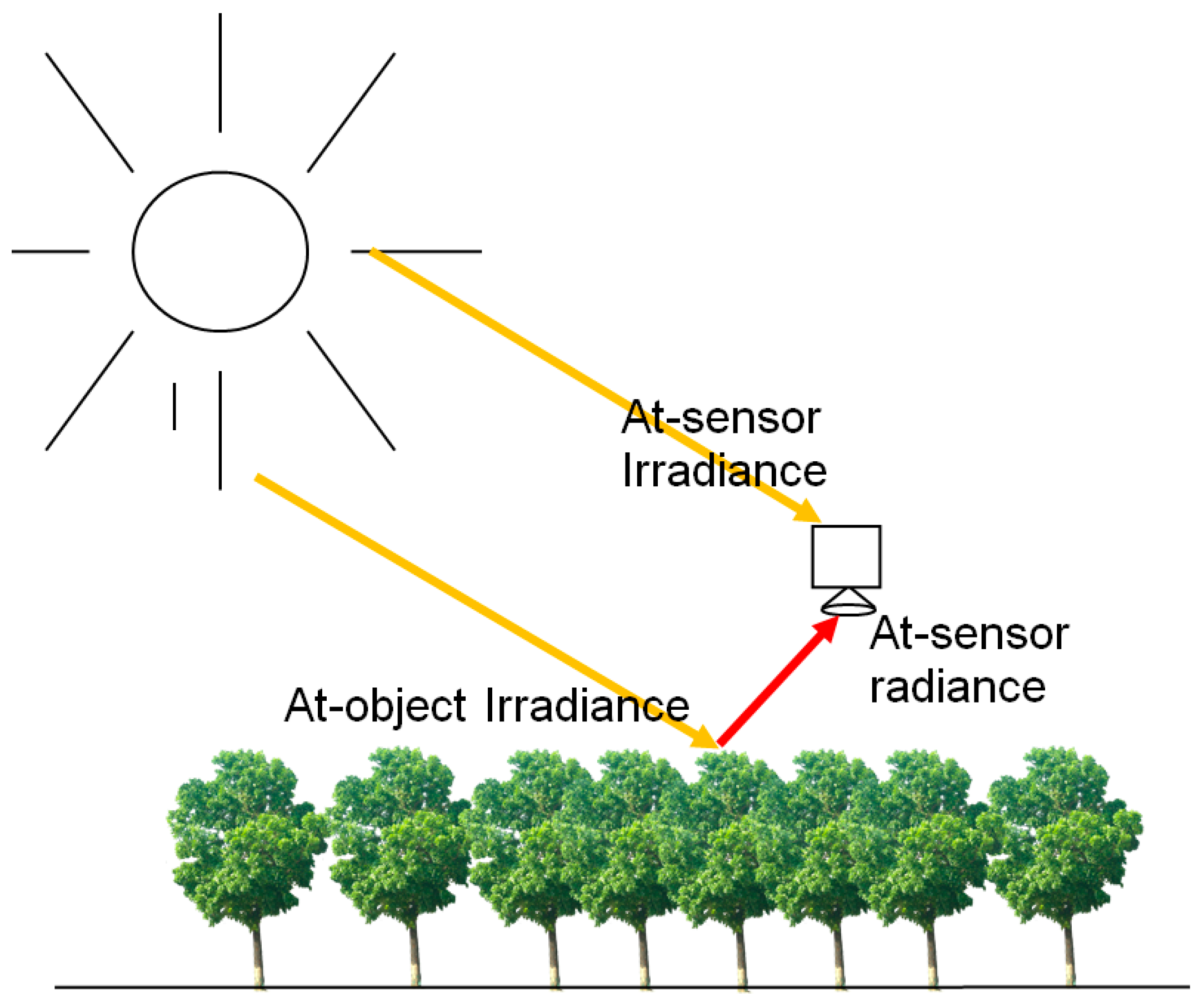
2.1. Proposed Method for Direct Hyperspectral Reflectance Measurement from Drone
2.2. UAV Based 3D Imaging Spectrometer System
2.2.1. The 2D Frame Format Hyperspectral Camera
2.2.2. Irradiance Spectrometers
2.3. Laboratory Calibration of the FPI Camera
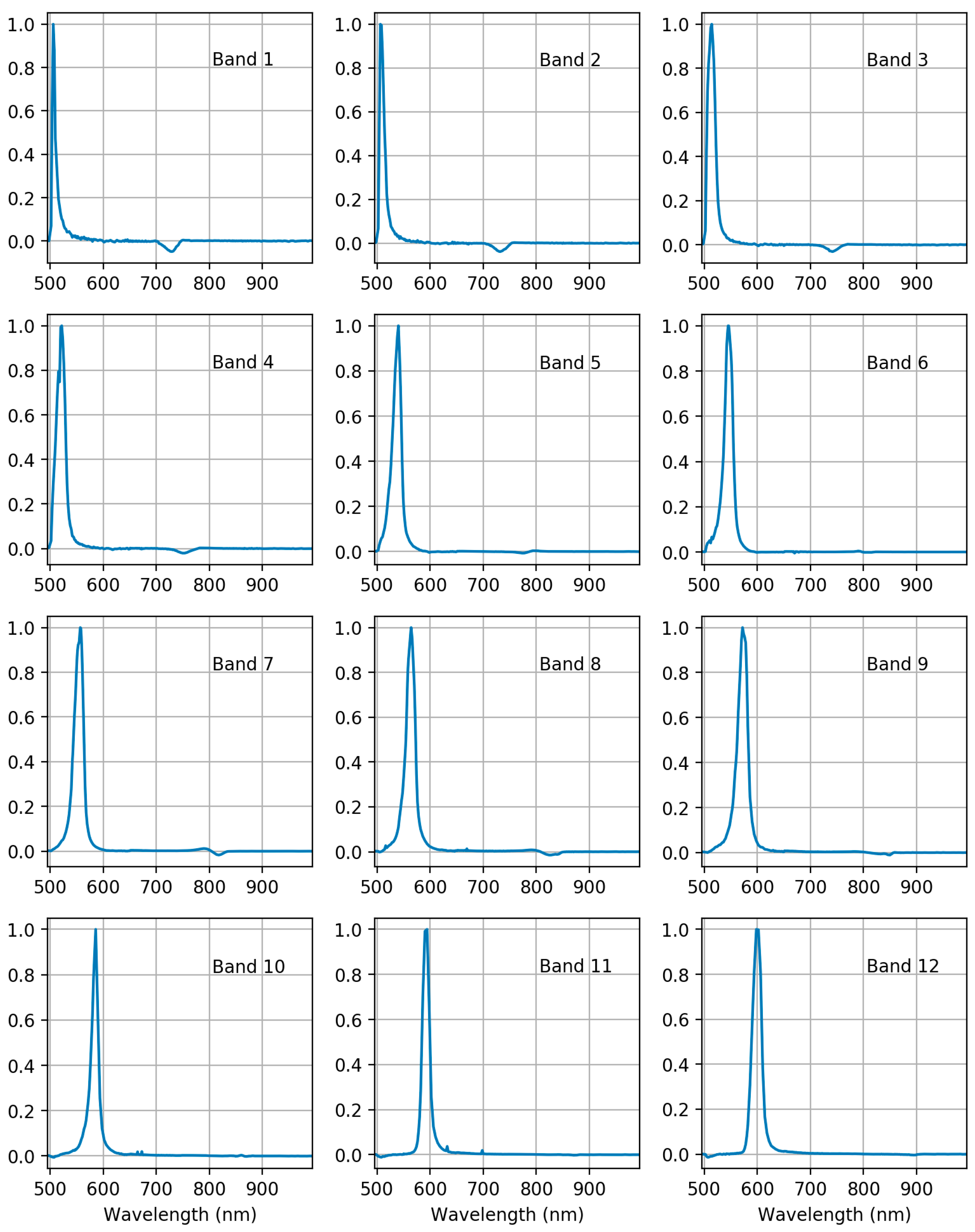
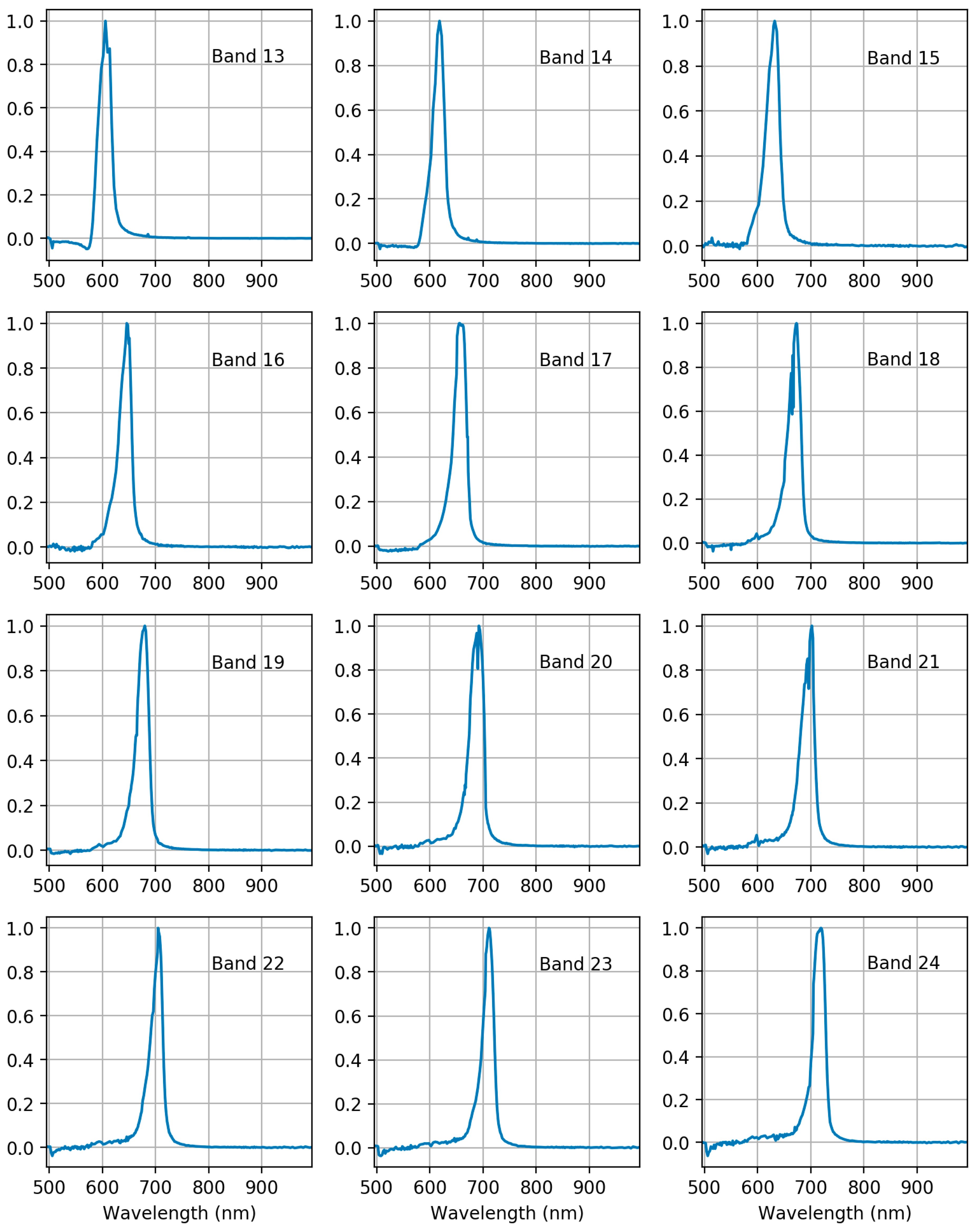
2.3.1. Spectral Calibration
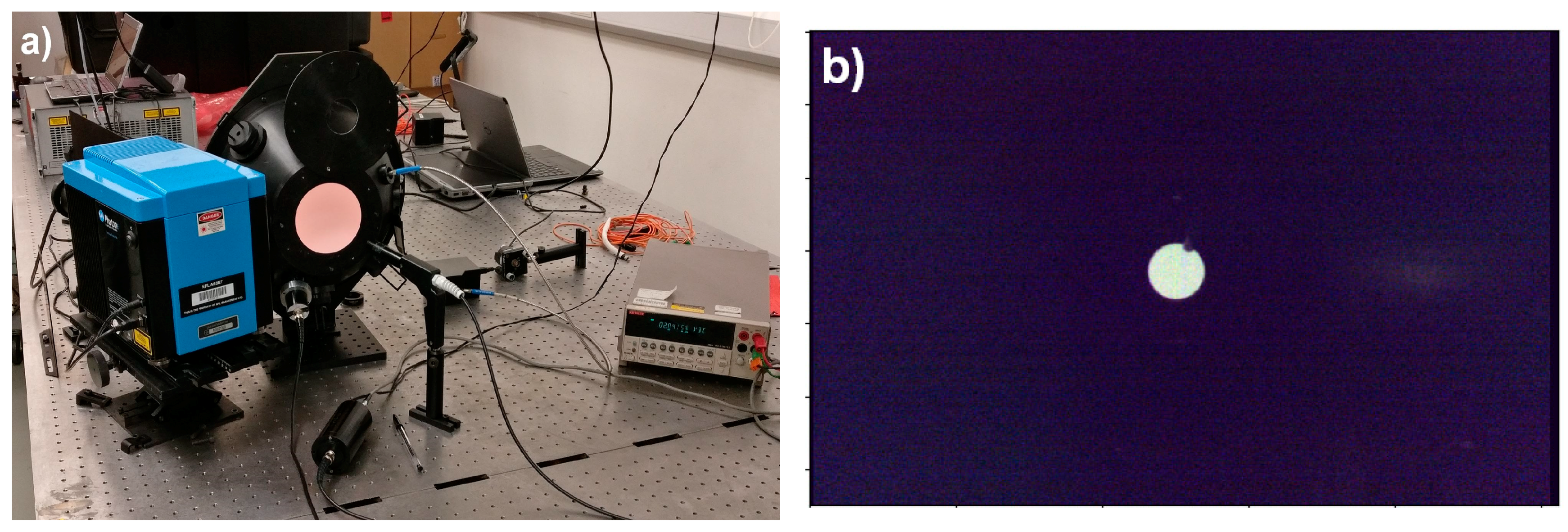
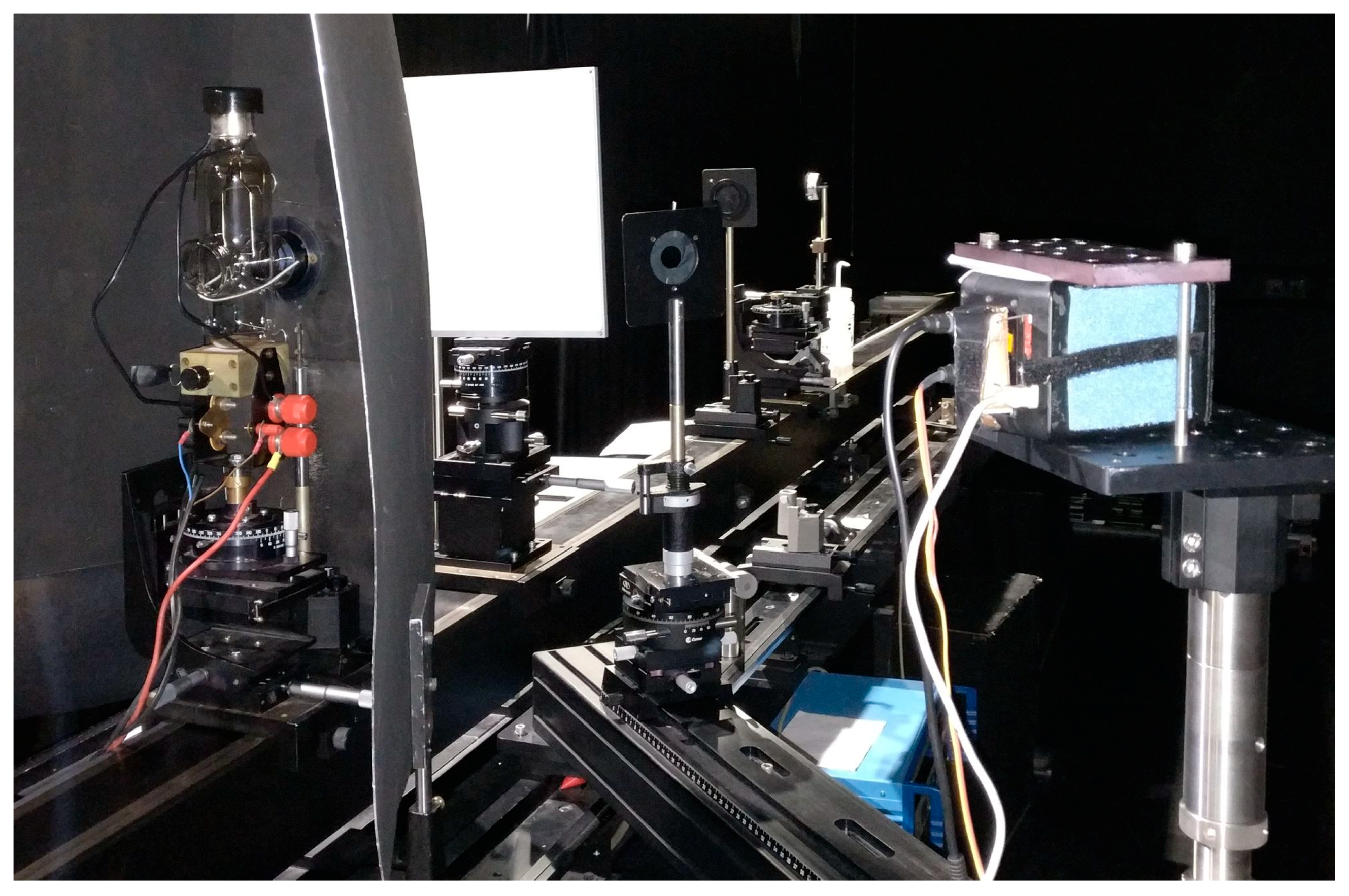
2.3.2. Absolute Radiance Calibration
2.3.3. Sensor Linearity Evaluation
2.3.4. Evaluation of FPI Camera Stability
2.4. UAV Data Capture and Data Processing Procedure
3. Results
3.1. Preliminary Study of FPI Camera Stability
3.2. Sensor Radiometric Laboratory Calibration at NPL
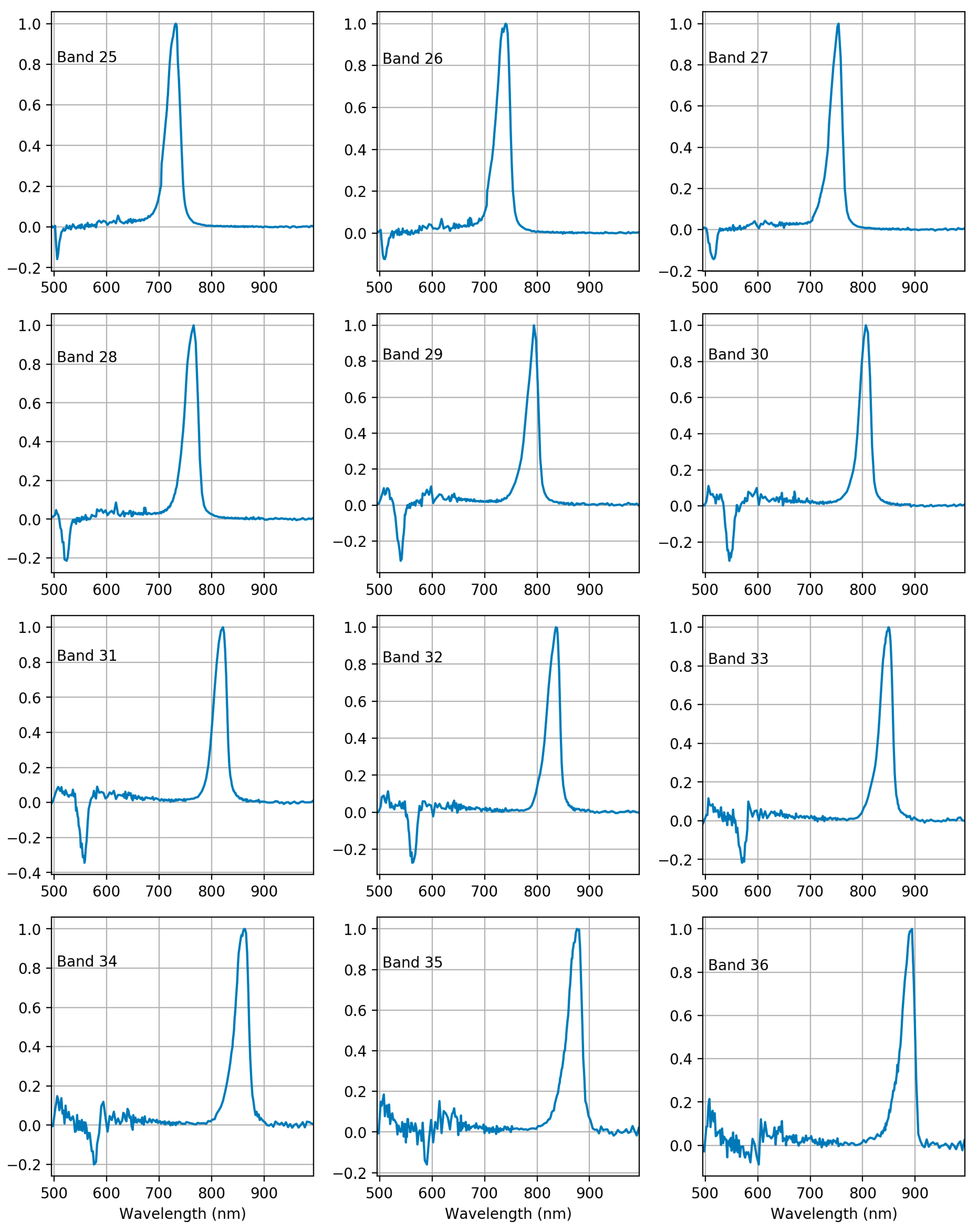
3.2.1. Spectral Calibration
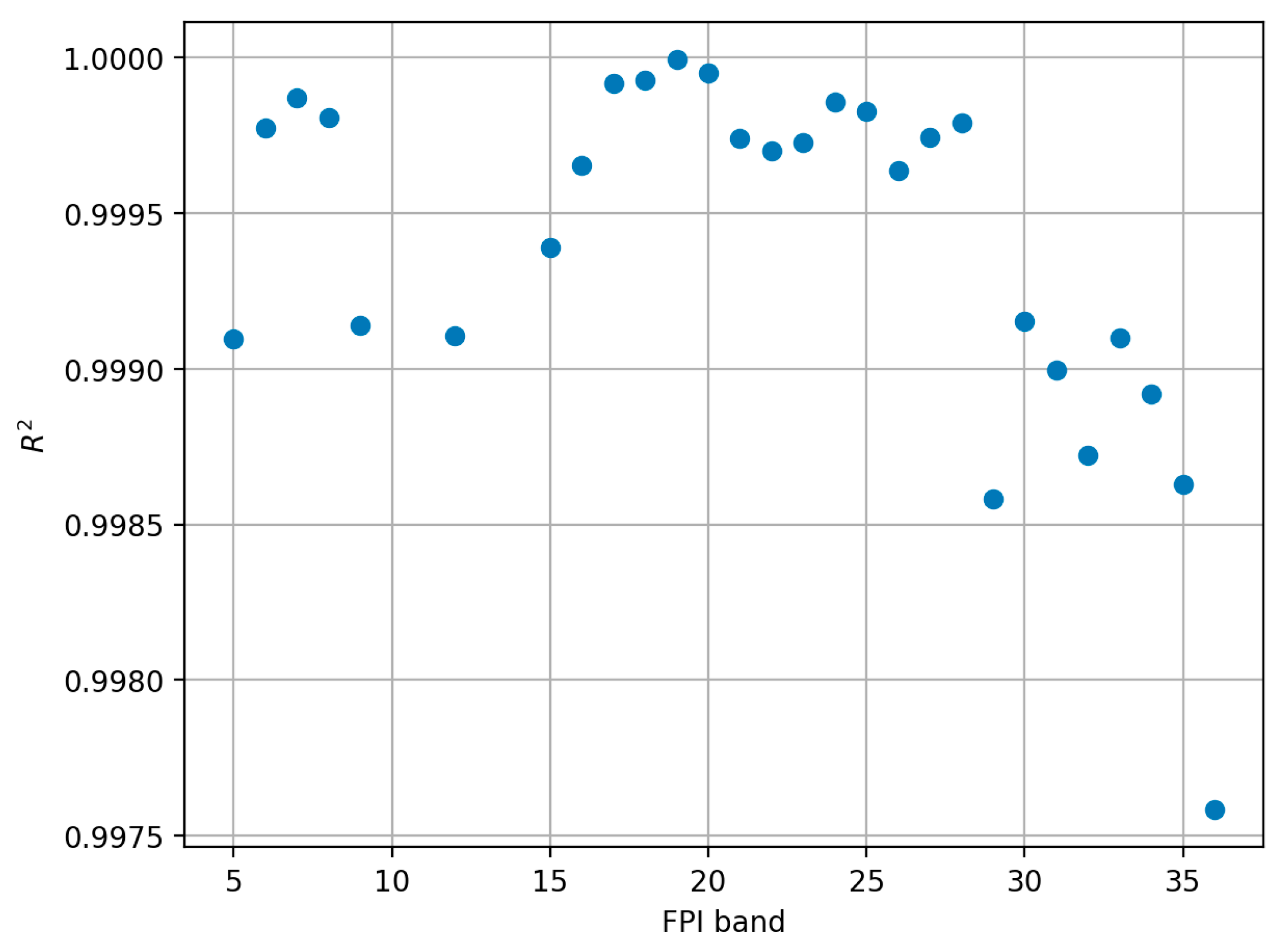
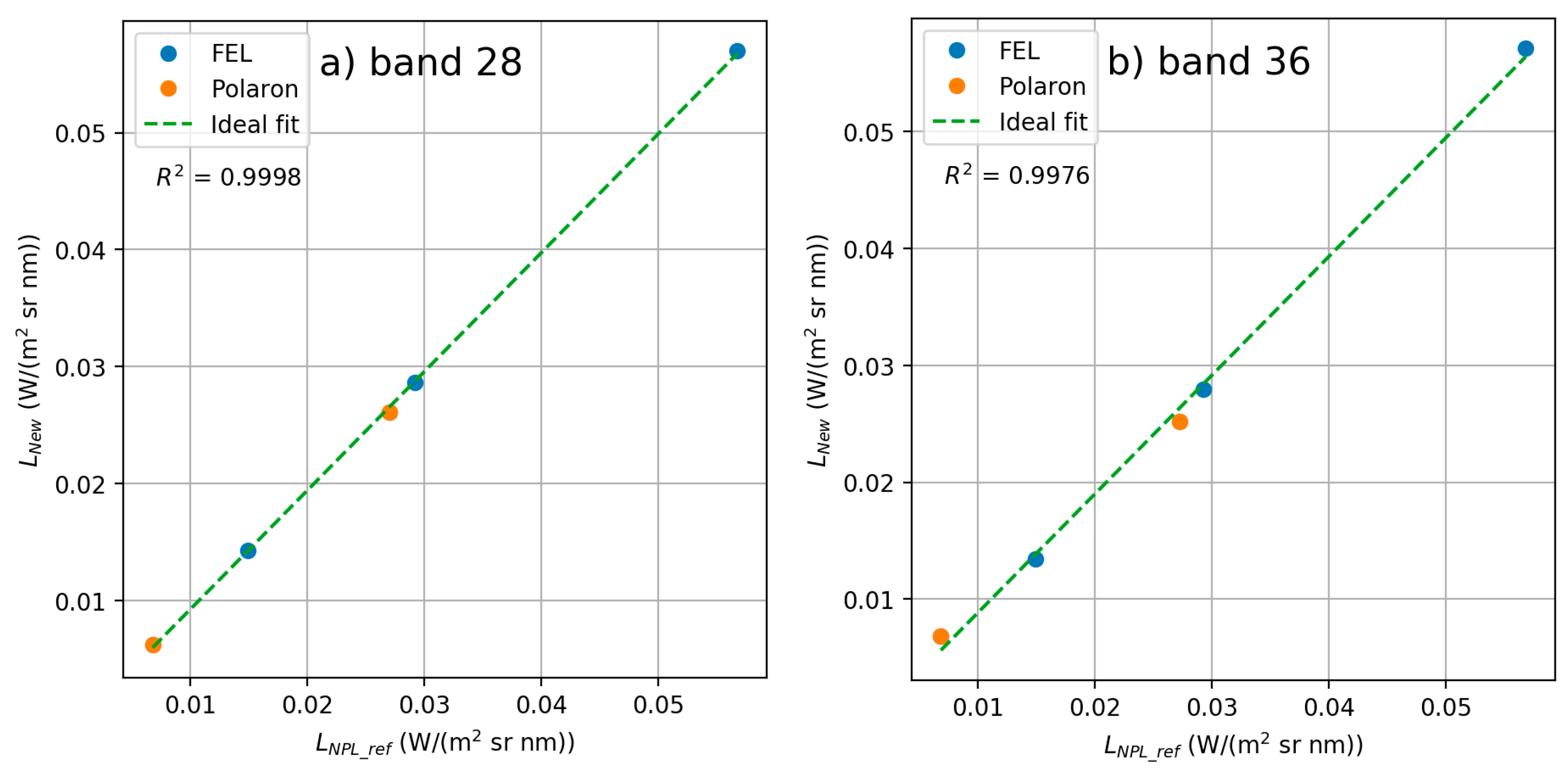
3.2.2. Radiance Calibration
3.2.3. Sensor Linearity Evaluation
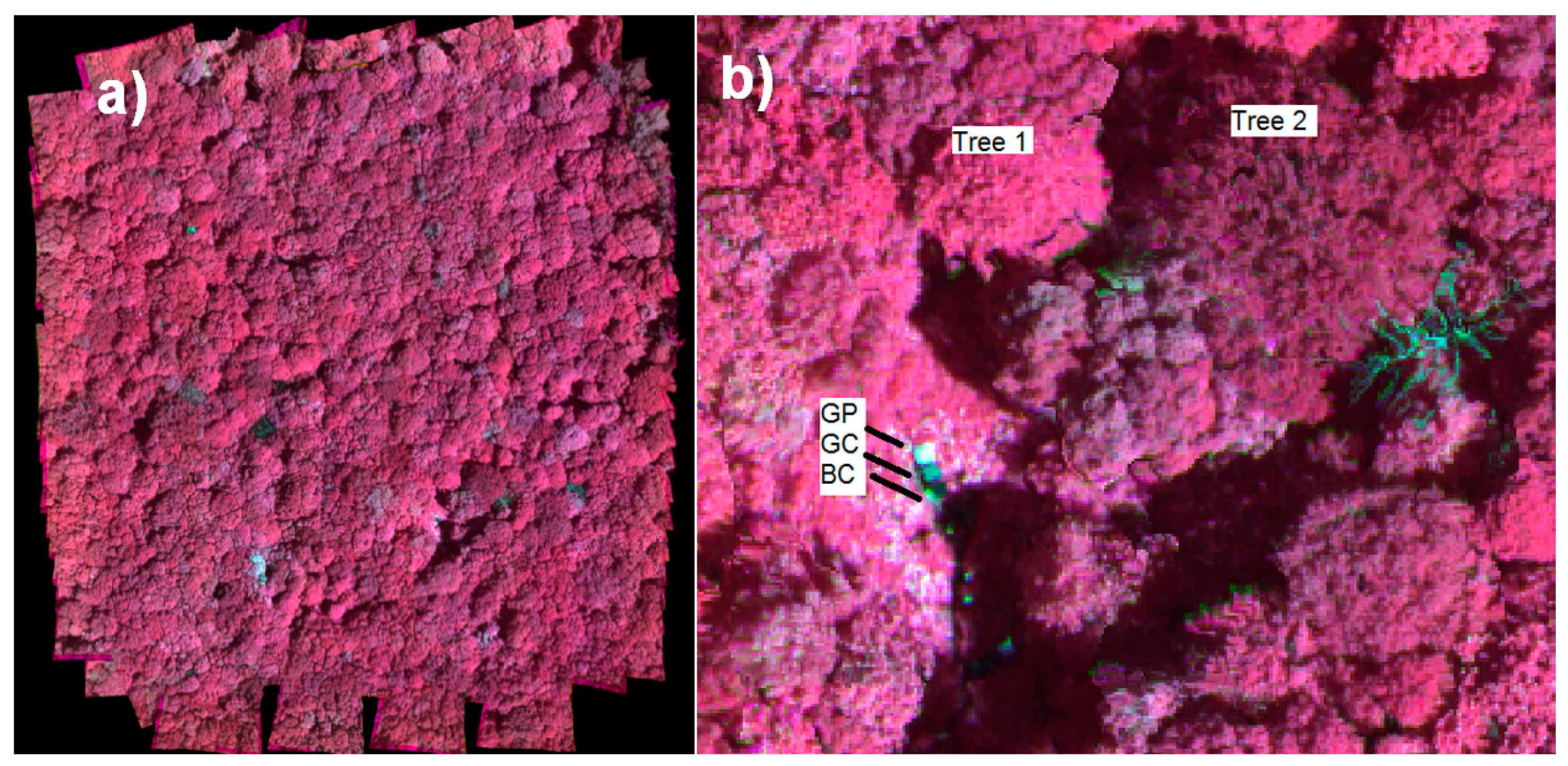
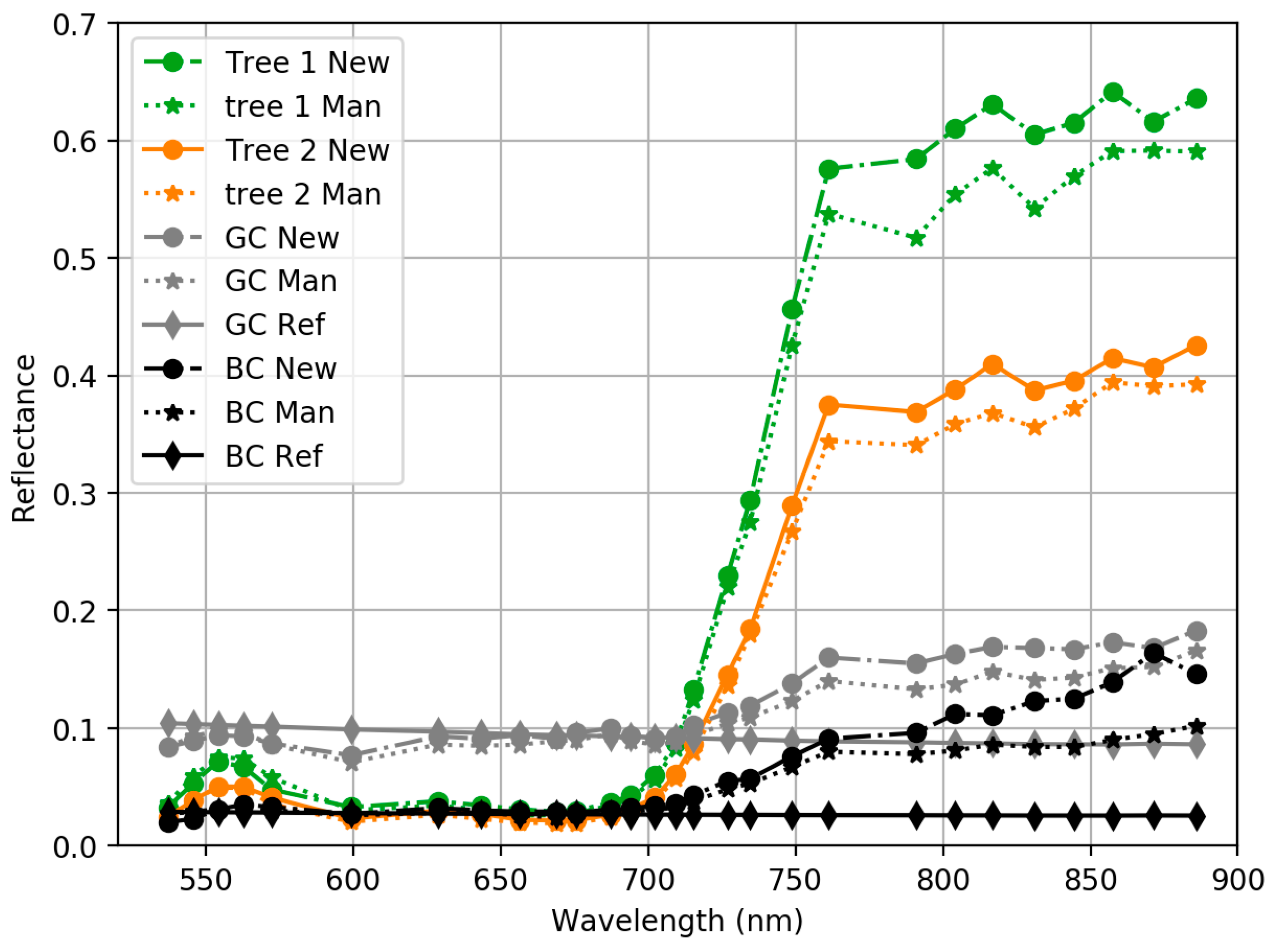
3.3. Drone Campaigns
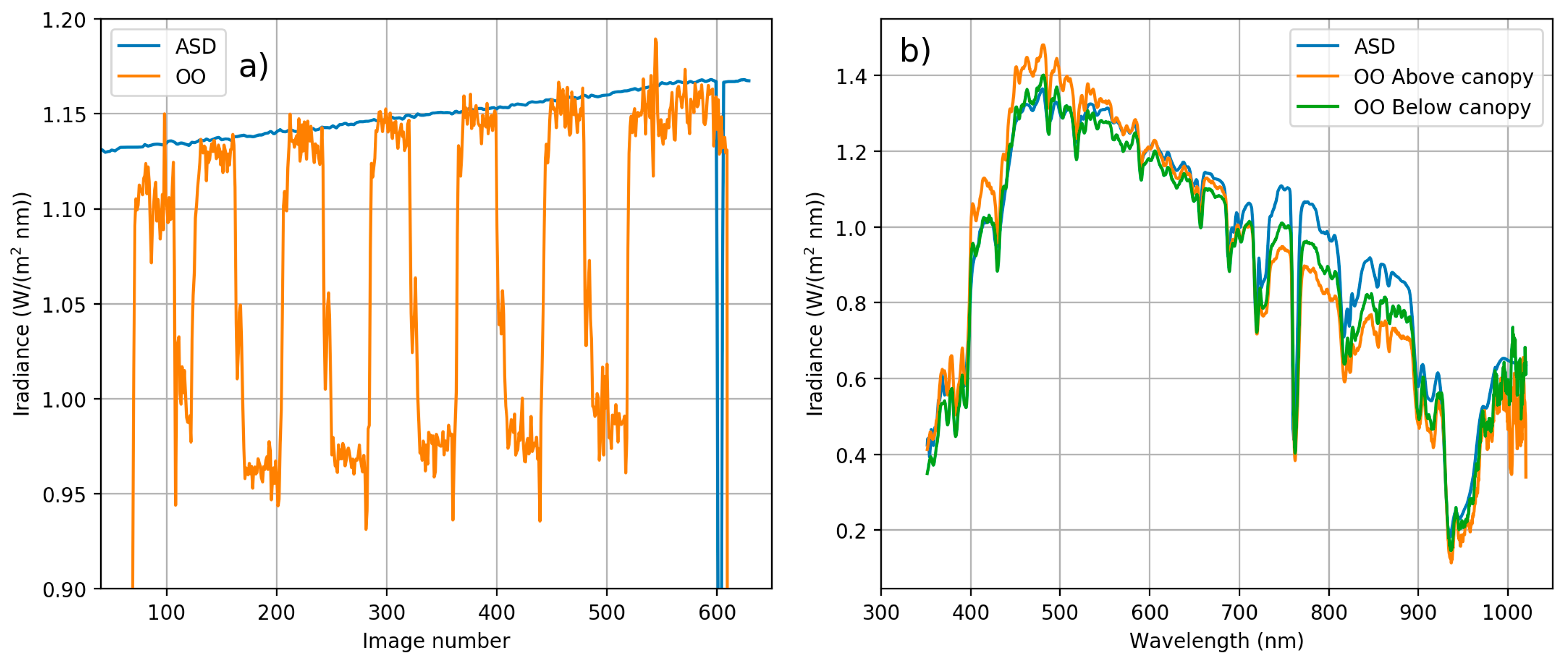
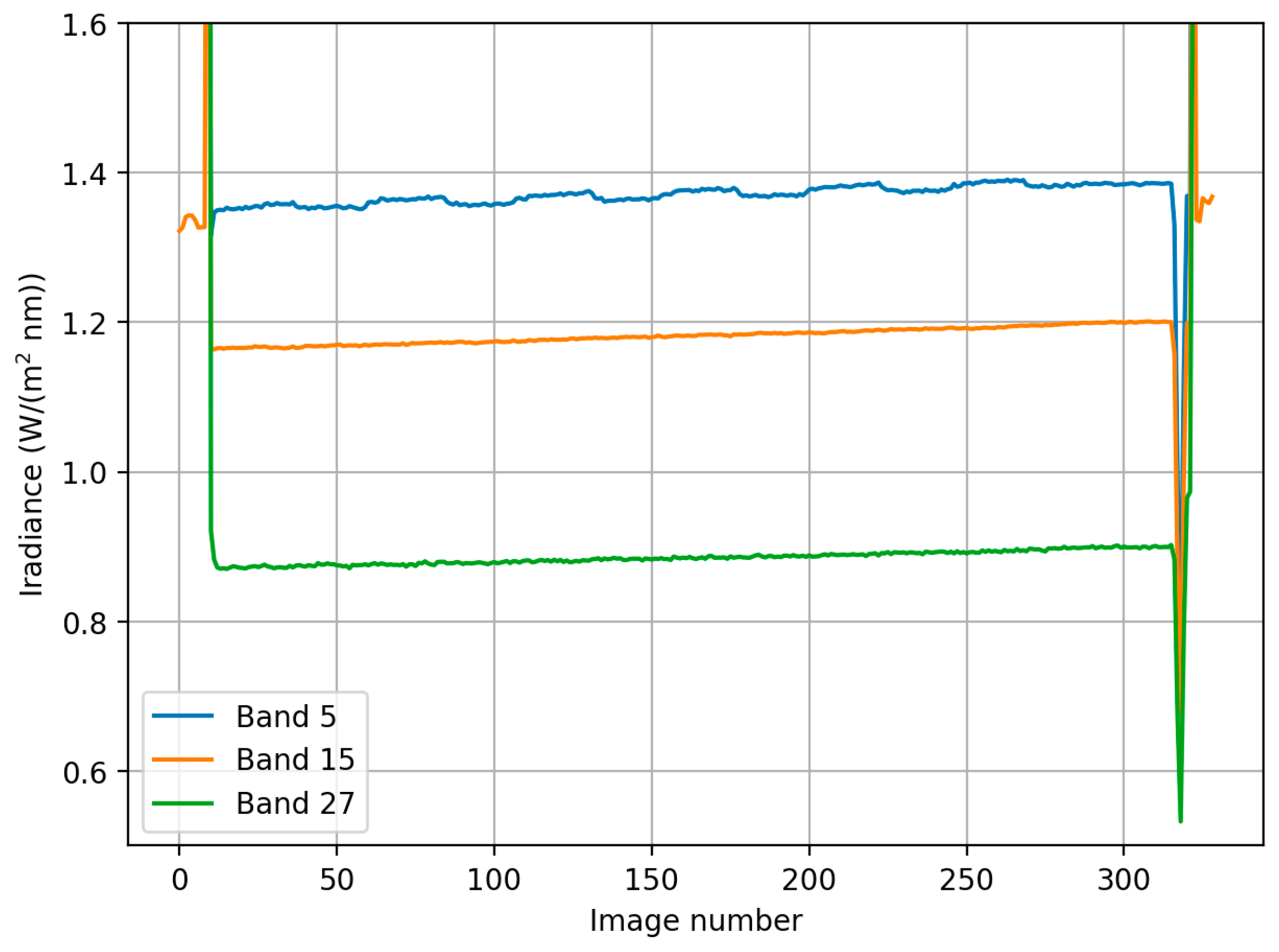
3.3.1. Processing of Ocean Optics Downwelling Irradiance Data
3.3.2. Reflectance Data Sets
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A



References
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- Honkavaara, E.; Saari, H.; Kaivosoja, J.; Pölönen, I.; Hakala, T.; Litkey, P.; Mäkynen, J.; Pesonen, L. Processing and Assessment of Spectrometric, Stereoscopic Imagery Collected Using a Lightweight UAV Spectral Camera for Precision Agriculture. Remote Sens. 2013, 5, 5006–5039. [Google Scholar] [CrossRef] [Green Version]
- Mäkynen, J.; Holmlund, C.; Saari, H.; Ojala, K.; Antila, T. Unmanned aerial vehicle (UAV) operated megapixel spectral camera. In Electro-Optical Remote Sensing, Photonic Technologies, and Applications V; SPIE: Prague, Czech Republic, 2011; Volume 8186. [Google Scholar]
- Honkavaara, E.; Markelin, L.; Hakala, T.; Peltoniemi, J. The Metrology of Directional, Spectral Reflectance Factor Measurements Based on Area Format Imaging by UAVs. Photogramm. Fernerkund. Geoinformation 2014, 2014, 175–188. [Google Scholar] [CrossRef]
- Schaepman-Strub, G.; Schaepman, M.E.; Painter, T.H.; Dangel, S.; Martonchik, J.V. Reflectance quantities in optical remote sensing—Definitions and case studies. Remote Sens. Environ. 2006, 103, 27–42. [Google Scholar] [CrossRef]
- Lucieer, A.; Malenovský, Z.; Veness, T.; Wallace, L. HyperUAS-Imaging Spectroscopy from a Multirotor Unmanned Aircraft System: HyperUAS-Imaging Spectroscopy from a Multirotor Unmanned. J. Field Robot. 2014, 31, 571–590. [Google Scholar] [CrossRef]
- Sandau, R. (Ed.) Digital Airborne Camera—Introduction and Technology; Springer: Dordrecht, The Netherlands, 2010; ISBN 978-1-4020-8877-3. [Google Scholar]
- Kelcey, J.; Lucieer, A. Sensor Correction of a 6-Band Multispectral Imaging Sensor for UAV Remote Sensing. Remote Sens. 2012, 4, 1462–1493. [Google Scholar] [CrossRef]
- Büttner, A.; Röser, H.-P. Hyperspectral Remote Sensing with the UAS “Stuttgarter Adler”—System Setup, Calibration and First Results. Photogramm. Fernerkund. Geoinformation 2014, 2014, 265–274. [Google Scholar] [CrossRef] [PubMed]
- Cocks, T.D.; Jenssen, R.; Steward, A.; Wilson, I.; Shieds, T. The HyMapTM Airborne Hyperspectral Sensor: The System, Calibration and Performance. In Proceedings of the 1st EARSeL Workshop on Imaging Spectroscopy, Zurich, Switzerland, 6–8 October 1998; pp. 37–42. [Google Scholar]
- Davis, C.; Bowles, J.; Leathers, R.; Korwan, D.; Downes, T.V.; Snyder, W.; Rhea, W.; Chen, W.; Fisher, J.; Bissett, P.; et al. Ocean PHILLS hyperspectral imager: Design, characterization, and calibration. Opt. Express 2002, 10, 210. [Google Scholar] [CrossRef] [PubMed]
- Gege, P.; Fries, J.; Haschberger, P.; Schötz, P.; Schwarzer, H.; Strobl, P.; Suhr, B.; Ulbrich, G.; Jan Vreeling, W. Calibration facility for airborne imaging spectrometers. ISPRS J. Photogramm. Remote Sens. 2009, 64, 387–397. [Google Scholar] [CrossRef]
- Ng, S.W.; Zulkifli, A. Establishing metrological traceability for radiometric calibration of earth observation sensor in Malaysia. IOP Conf. Ser. Mater. Sci. Eng. 2016, 152, 012028. [Google Scholar] [CrossRef]
- Voss, K.J.; Belmar da Costa, L. Polarization properties of FEL lamps as applied to radiometric calibration. Appl. Opt. 2016, 55, 8829. [Google Scholar] [CrossRef] [PubMed]
- Chrien, T.G.; Green, R.O.; Eastwood, M.L. Accuracy of the spectral and radiometric laboratory calibration of the Airborne Visible/Infrared Imaging Spectrometer. In Imaging Spectroscopy of the Terrestrial Environment; Vane, G., Ed.; SPIE: Prague, Czech Republic, 1990; pp. 37–49. [Google Scholar]
- Yang, G.; Li, C.; Wang, Y.; Yuan, H.; Feng, H.; Xu, B.; Yang, X. The DOM Generation and Precise Radiometric Calibration of a UAV-Mounted Miniature Snapshot Hyperspectral Imager. Remote Sens. 2017, 9, 642. [Google Scholar] [CrossRef]
- Suomalainen, J.; Anders, N.; Iqbal, S.; Roerink, G.; Franke, J.; Wenting, P.; Hünniger, D.; Bartholomeus, H.; Becker, R.; Kooistra, L. A Lightweight Hyperspectral Mapping System and Photogrammetric Processing Chain for Unmanned Aerial Vehicles. Remote Sens. 2014, 6, 11013–11030. [Google Scholar] [CrossRef]
- Aasen, H.; Bolten, A. Multi-temporal high-resolution imaging spectroscopy with hyperspectral 2D imagers – From theory to application. Remote Sens. Environ. 2018, 205, 374–389. [Google Scholar] [CrossRef]
- Smith, G.M.; Milton, E.J. The use of the empirical line method to calibrate remotely sensed data to reflectance. Int. J. Remote Sens. 1999, 20, 2653–2662. [Google Scholar] [CrossRef]
- Von Bueren, S.K.; Burkart, A.; Hueni, A.; Rascher, U.; Tuohy, M.P.; Yule, I.J. Deploying four optical UAV-based sensors over grassland: Challenges and limitations. Biogeosciences 2015, 12, 163–175. [Google Scholar] [CrossRef] [Green Version]
- Hakala, T.; Honkavaara, E.; Saari, H.; Mäkynen, J.; Kaivosoja, J.; Pesonen, L.; Pölönen, I. Spectral imaging from UAVs under varying illumination conditions. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences; International Society of Photogrammetry and Remote Sensing (ISPRS): Christian Heipke, Germany, 2013; pp. 189–194. [Google Scholar] [CrossRef]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.; et al. Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef]
- Burkart, A.; Hecht, V.L.; Kraska, T.; Rascher, U. Phenological analysis of unmanned aerial vehicle based time series of barley imagery with high temporal resolution. Precis. Agric. 2018, 19, 134–146. [Google Scholar] [CrossRef]
- Miyoshi, G.T.; Imai, N.N.; Tommaselli, A.M.G.; Honkavaara, E.; Näsi, R.; Moriya, É.A.S. Radiometric block adjustment of hyperspectral image blocks in the Brazilian environment. Int. J. Remote Sens. 2018, 1–21. [Google Scholar] [CrossRef]
- Honkavaara, E.; Hakala, T.; Markelin, L.; Rosnell, T.; Saari, H.; Mäkynen, J. A Process for Radiometric Correction of UAV Image Blocks. Photogramm. Fernerkund. Geoinformation 2012, 2012, 115–127. [Google Scholar] [CrossRef]
- Burkart, A.; Aasen, H.; Alonso, L.; Menz, G.; Bareth, G.; Rascher, U. Angular Dependency of Hyperspectral Measurements over Wheat Characterized by a Novel UAV Based Goniometer. Remote Sens. 2015, 7, 725–746. [Google Scholar] [CrossRef] [Green Version]
- Suomalainen, J.; Hakala, T.; Honkavaara, E. Measuring incident irradiance on-board an unstable UAV platform—First results on virtual horizontation of multiangle measurements. In Proceedings of the International Conference on Unmanned Aerial Vehicles in Geomatics, Bonn, Germany, 4–7 September 2017. [Google Scholar]
- Von Schoenermark, M.F.; Roeser, H.-P.L. Reflection properties of vegetation and soil with a new BRDF database. In Targets and Backgrounds X: Characterization and Representation; Watkins, W.R., Clement, D., Reynolds, W.R., Eds.; SPIE: Prague, Czech Republic, 2004. [Google Scholar]
- Saari, H.; Pölönen, I.; Salo, H.; Honkavaara, E.; Hakala, T.; Holmlund, C.; Mäkynen, J.; Mannila, R.; Antila, T.; Akujärvi, A. Miniaturized hyperspectral imager calibration and UAV flight campaigns. In Sensors, Systems, and Next-Generation Satellites XVII; Meynart, R., Neeck, S.P., Shimoda, H., Eds.; SPIE: Prague, Czech Republic, 2013. [Google Scholar]
- O’Haver, T. A Pragmatic Introduction to Signal Processing with Applications in Scientific Measurement. Available online: http://terpconnect.umd.edu/~toh/spectrum/index.html (accessed on 26 April 2018).
- Honkavaara, E.; Rosnell, T.; Oliveira, R.; Tommaselli, A. Band registration of tuneable frame format hyperspectral UAV imagers in complex scenes. ISPRS J. Photogramm. Remote Sens. 2017, 134, 96–109. [Google Scholar] [CrossRef]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. The Need for Accurate Geometric and Radiometric Corrections of Drone-Borne Hyperspectral Data for Mineral Exploration: MEPHySTo—A Toolbox for Pre-Processing Drone-Borne Hyperspectral Data. Remote Sens. 2017, 9, 88. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lamp | Distance (mm) | Integration Times (ms) | |||
|---|---|---|---|---|---|
| Polaron | 500 | 10 | 20 | 30 | - |
| 1000 | 10 | 20 | 30 | 50 | |
| FEL | 500 | 10 | 15 | - | - |
| 707 | 10 | 15 | 20 | 25 | |
| 1000 | 10 | 15 | 20 | 25 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hakala, T.; Markelin, L.; Honkavaara, E.; Scott, B.; Theocharous, T.; Nevalainen, O.; Näsi, R.; Suomalainen, J.; Viljanen, N.; Greenwell, C.; et al. Direct Reflectance Measurements from Drones: Sensor Absolute Radiometric Calibration and System Tests for Forest Reflectance Characterization. Sensors 2018, 18, 1417. https://0-doi-org.brum.beds.ac.uk/10.3390/s18051417
Hakala T, Markelin L, Honkavaara E, Scott B, Theocharous T, Nevalainen O, Näsi R, Suomalainen J, Viljanen N, Greenwell C, et al. Direct Reflectance Measurements from Drones: Sensor Absolute Radiometric Calibration and System Tests for Forest Reflectance Characterization. Sensors. 2018; 18(5):1417. https://0-doi-org.brum.beds.ac.uk/10.3390/s18051417
Chicago/Turabian StyleHakala, Teemu, Lauri Markelin, Eija Honkavaara, Barry Scott, Theo Theocharous, Olli Nevalainen, Roope Näsi, Juha Suomalainen, Niko Viljanen, Claire Greenwell, and et al. 2018. "Direct Reflectance Measurements from Drones: Sensor Absolute Radiometric Calibration and System Tests for Forest Reflectance Characterization" Sensors 18, no. 5: 1417. https://0-doi-org.brum.beds.ac.uk/10.3390/s18051417