Health Monitoring of Bolted Spherical Joint Connection Based on Active Sensing Technique Using Piezoceramic Transducers


Abstract
:1. Introduction
2. The Principle for Monitoring the Tightness of Bolt-Sphere Connection Based on Active Sensing Technique
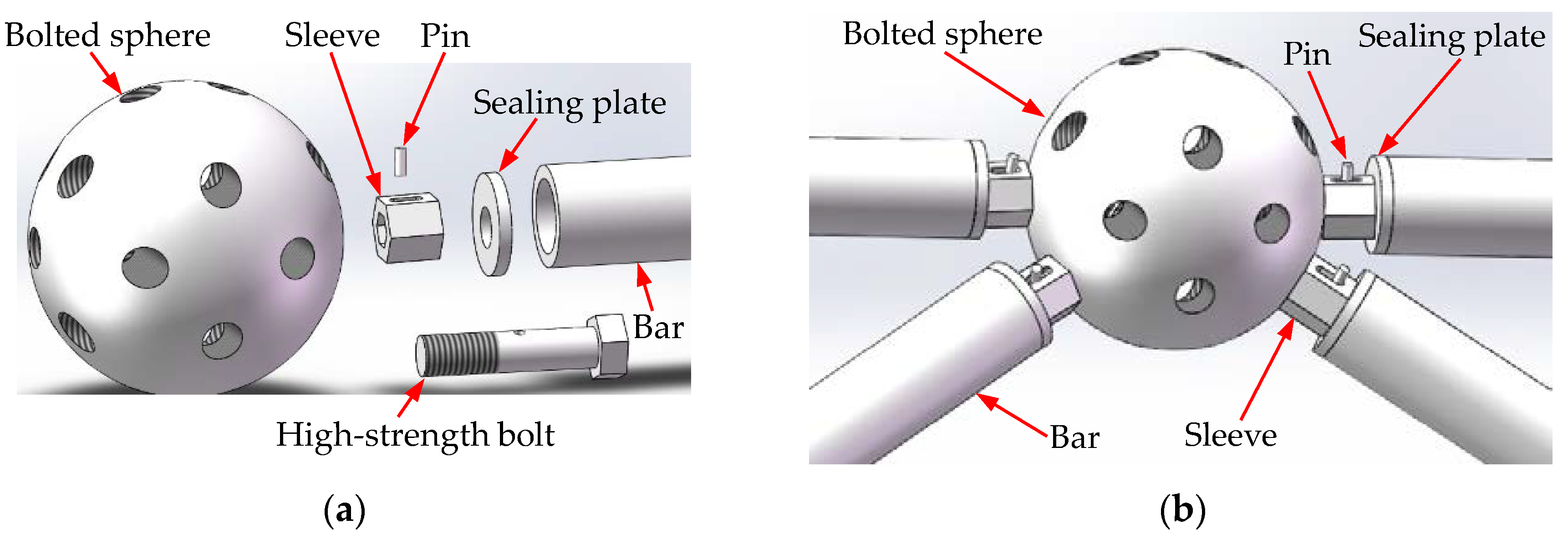
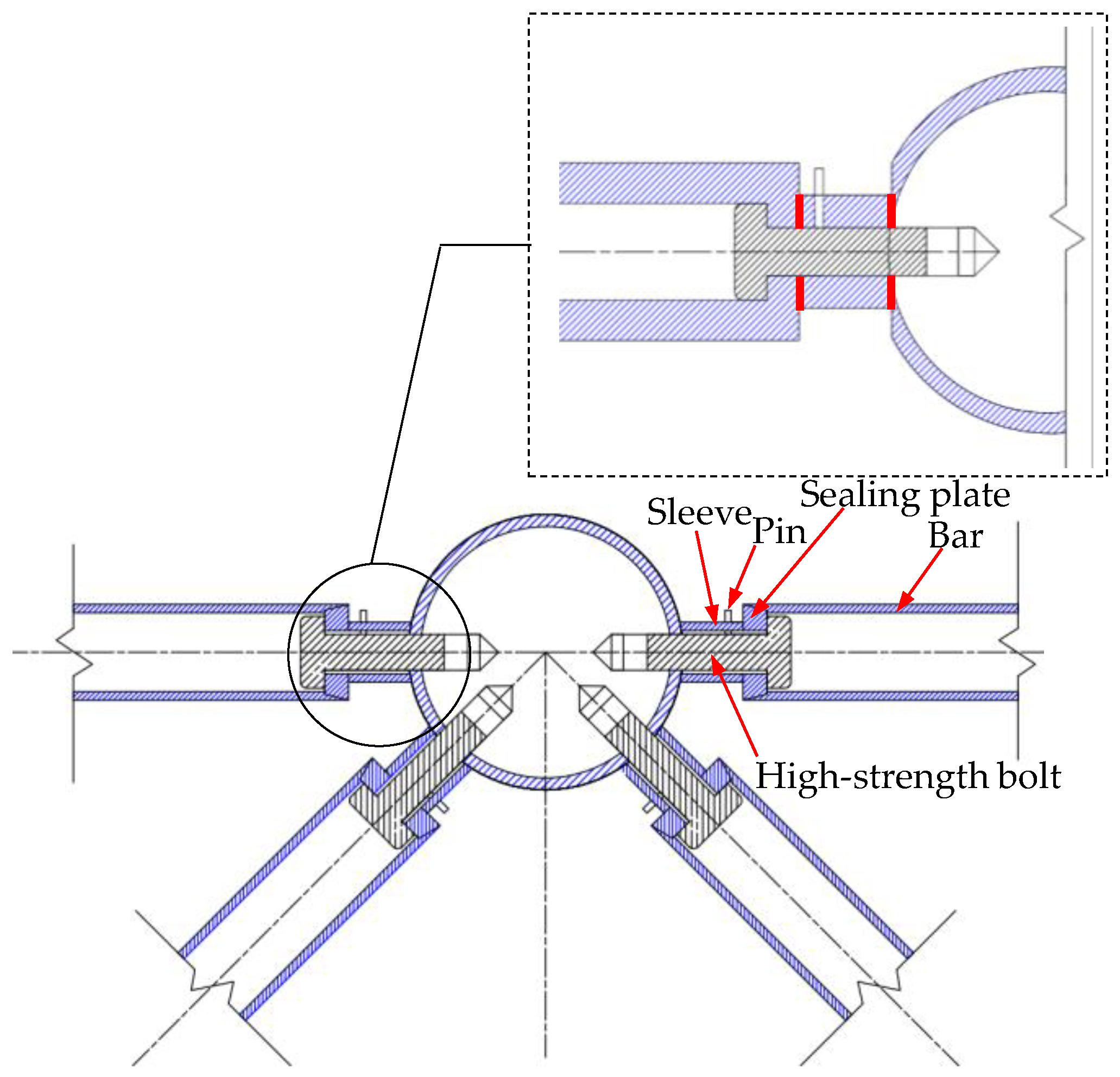
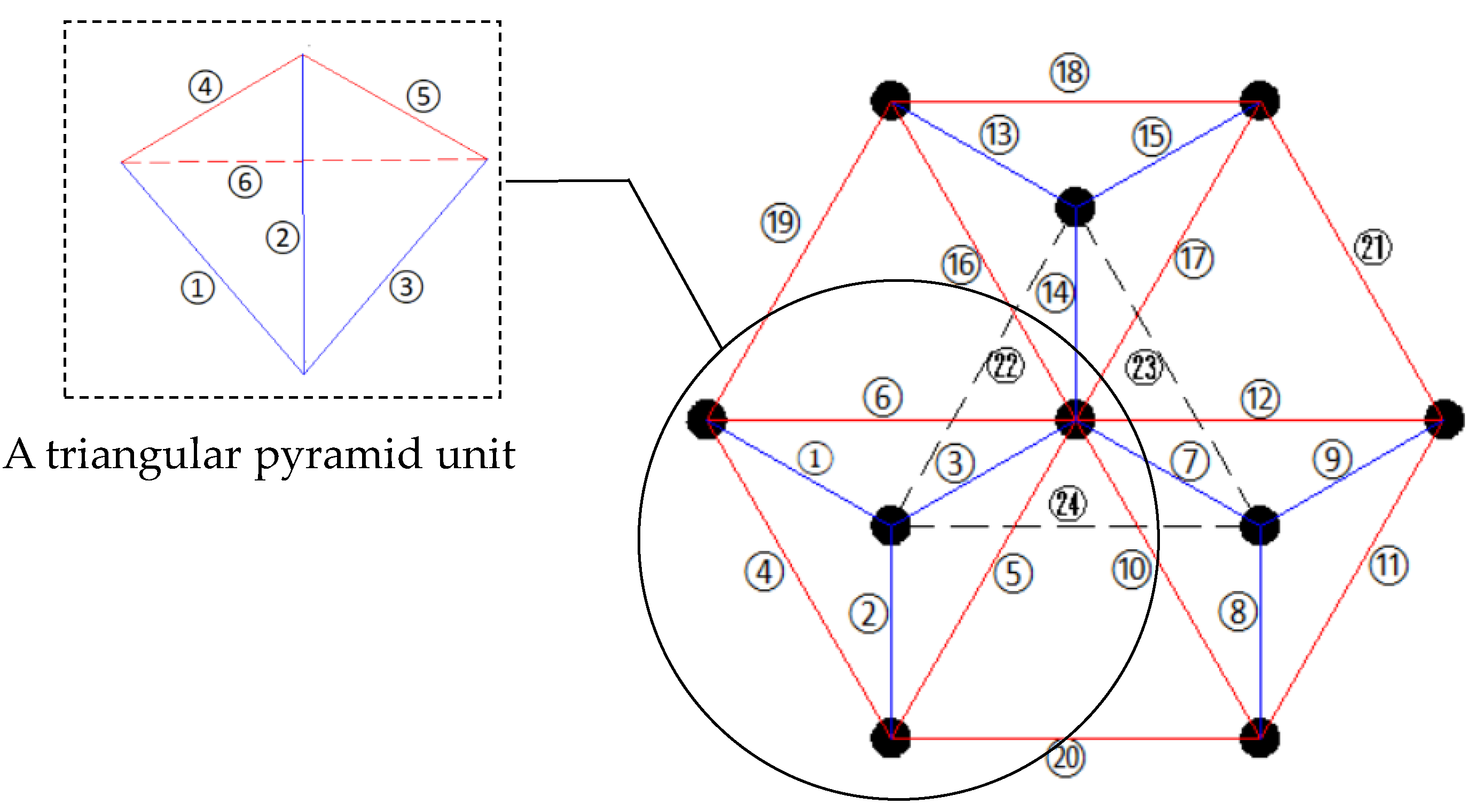
2.1. Bolted Spherical Joint Structure
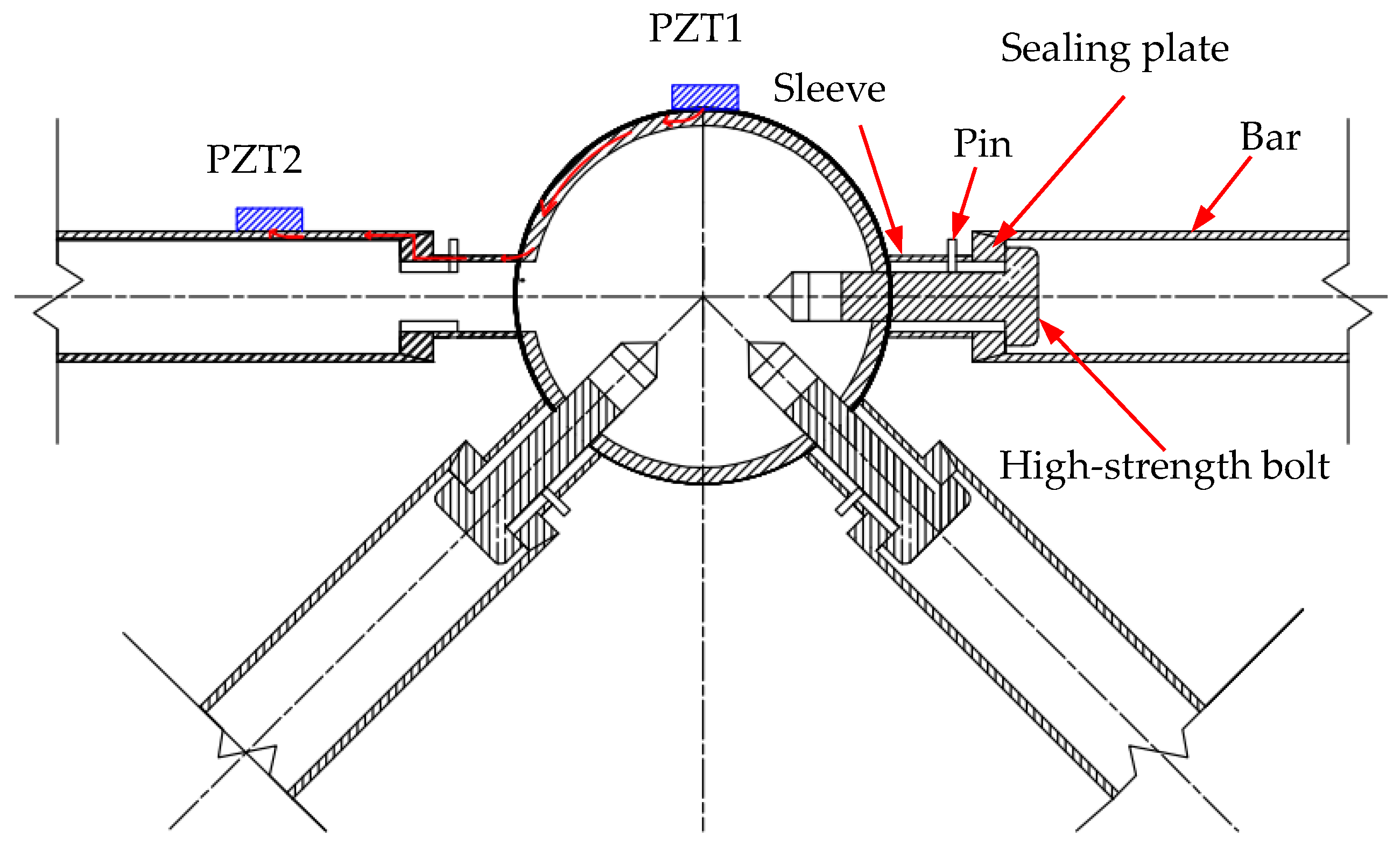
2.2. Basic Principle of Bolt-Sphere Connection Monitoring Based on Active Sensing Technique
2.3. Basic Principle of Bolt-Sphere Connection Monitoring Based on Wavelet Packet Technology
2.4. Basic Principle of Bolt-Sphere Connection Monitoring Based on Time Reversal Method
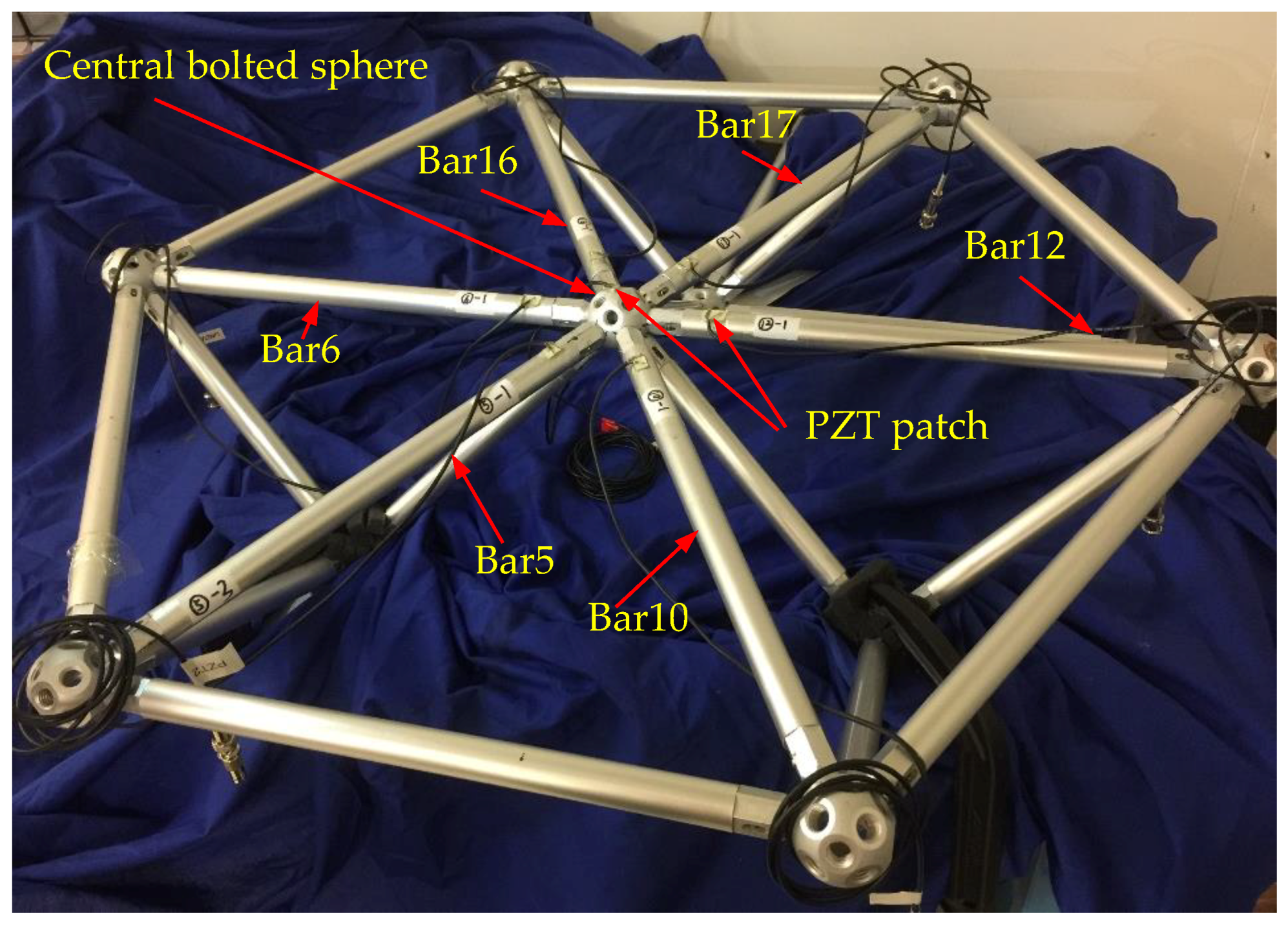
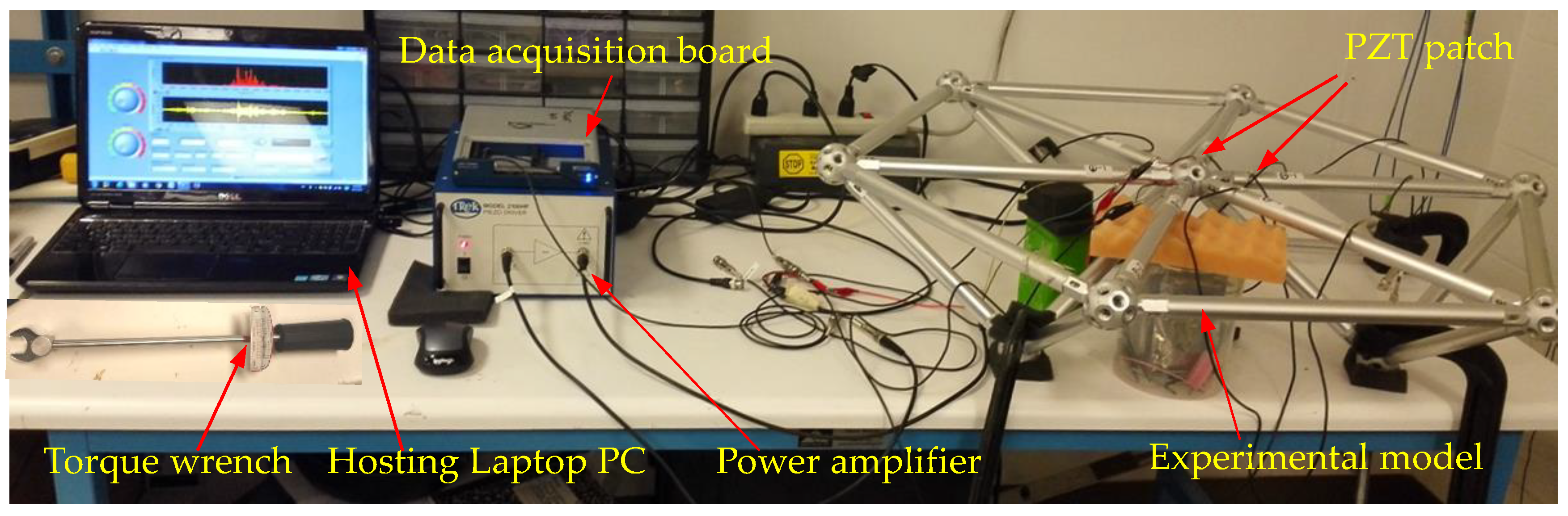
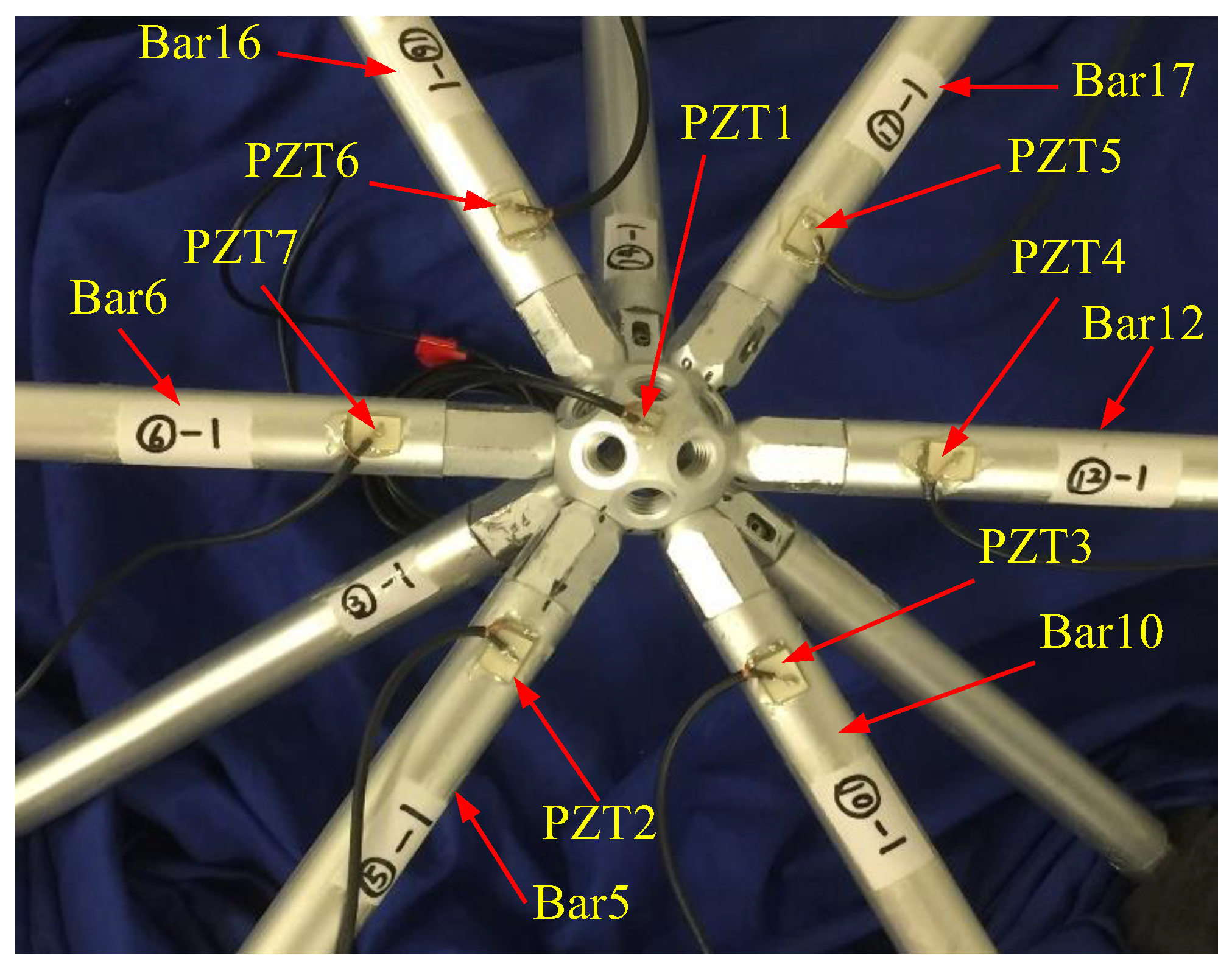
3. Experimental Setup
4. Experimental Procedures and Results
4.1. Experimental Procedures
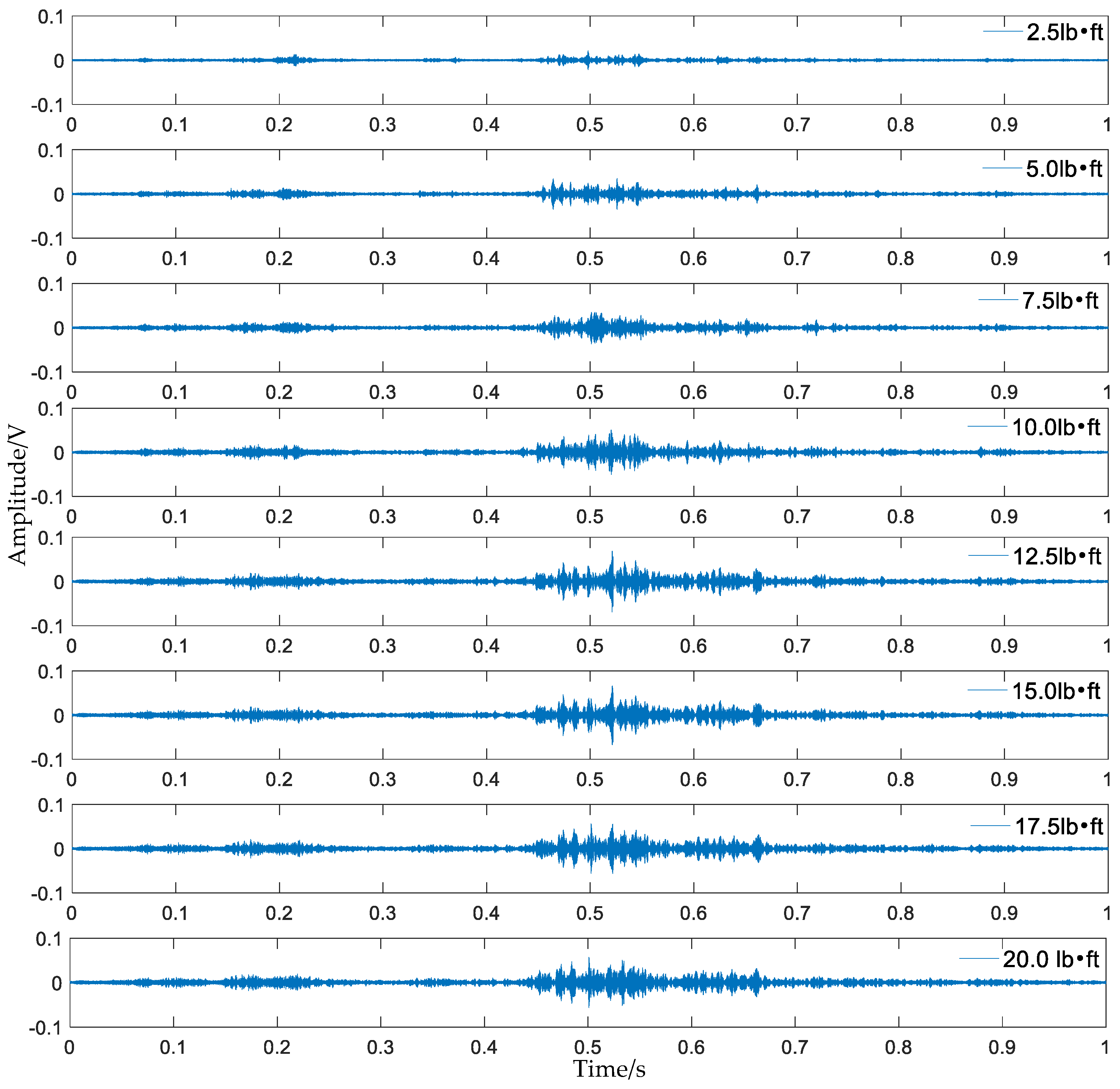
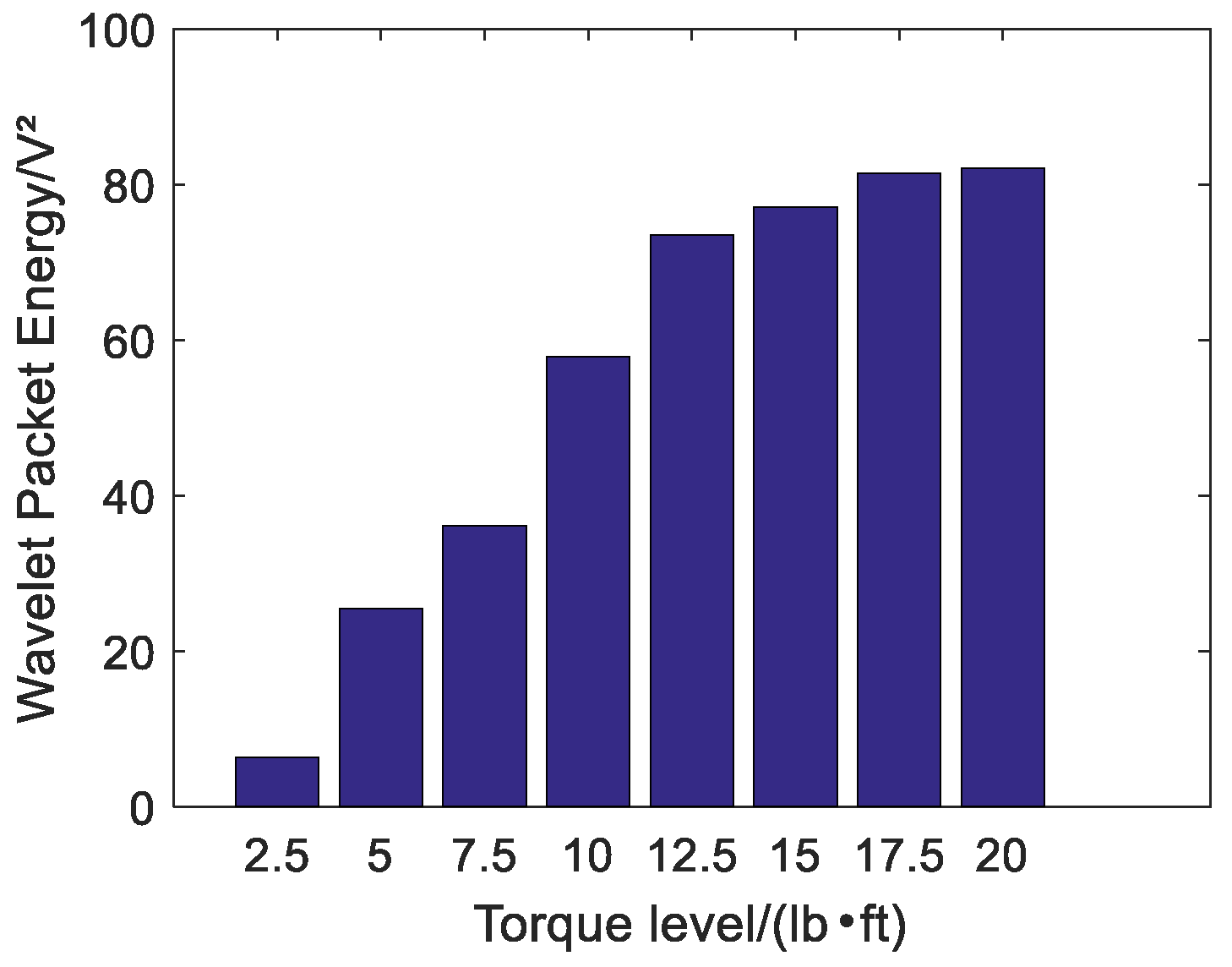
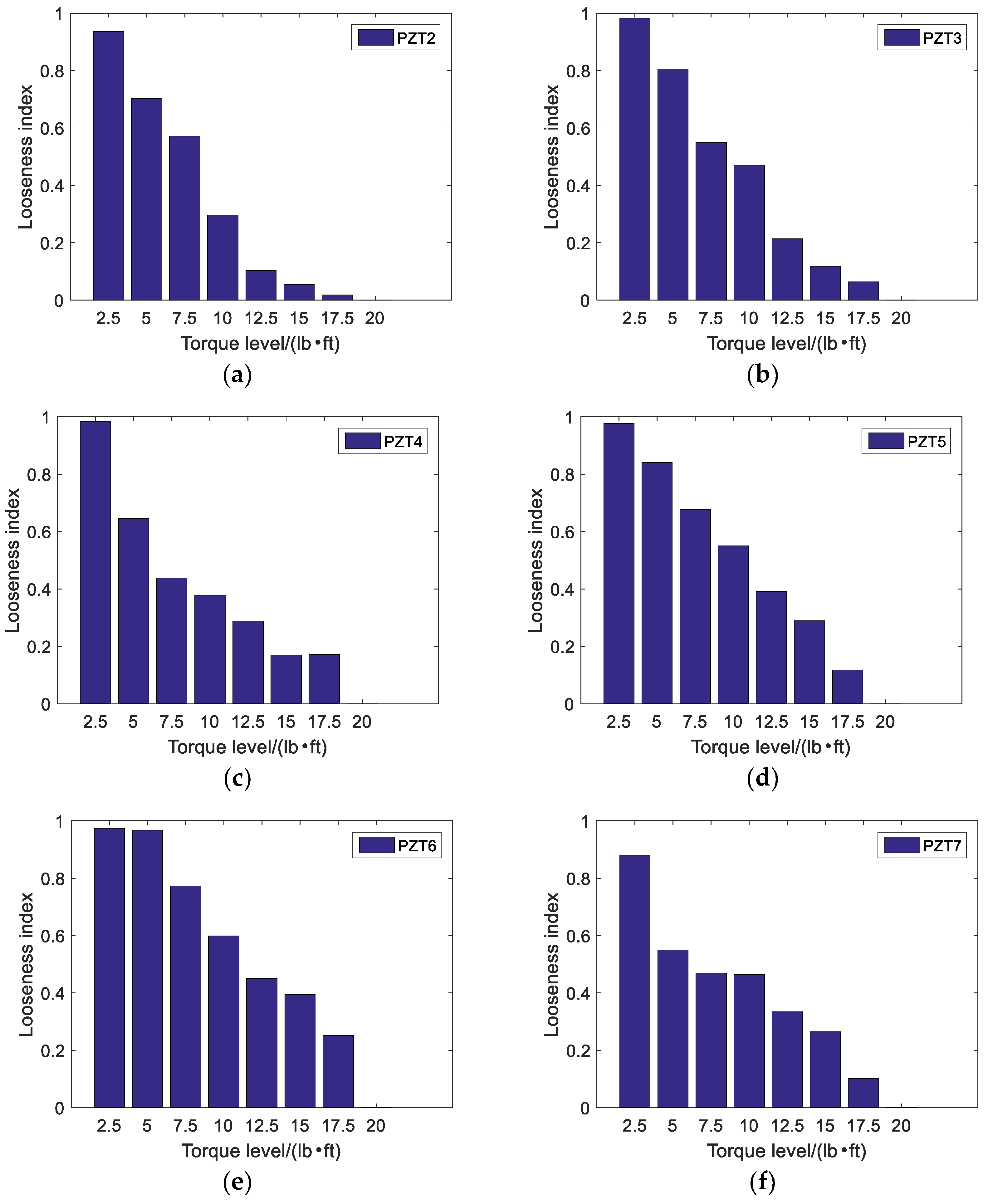
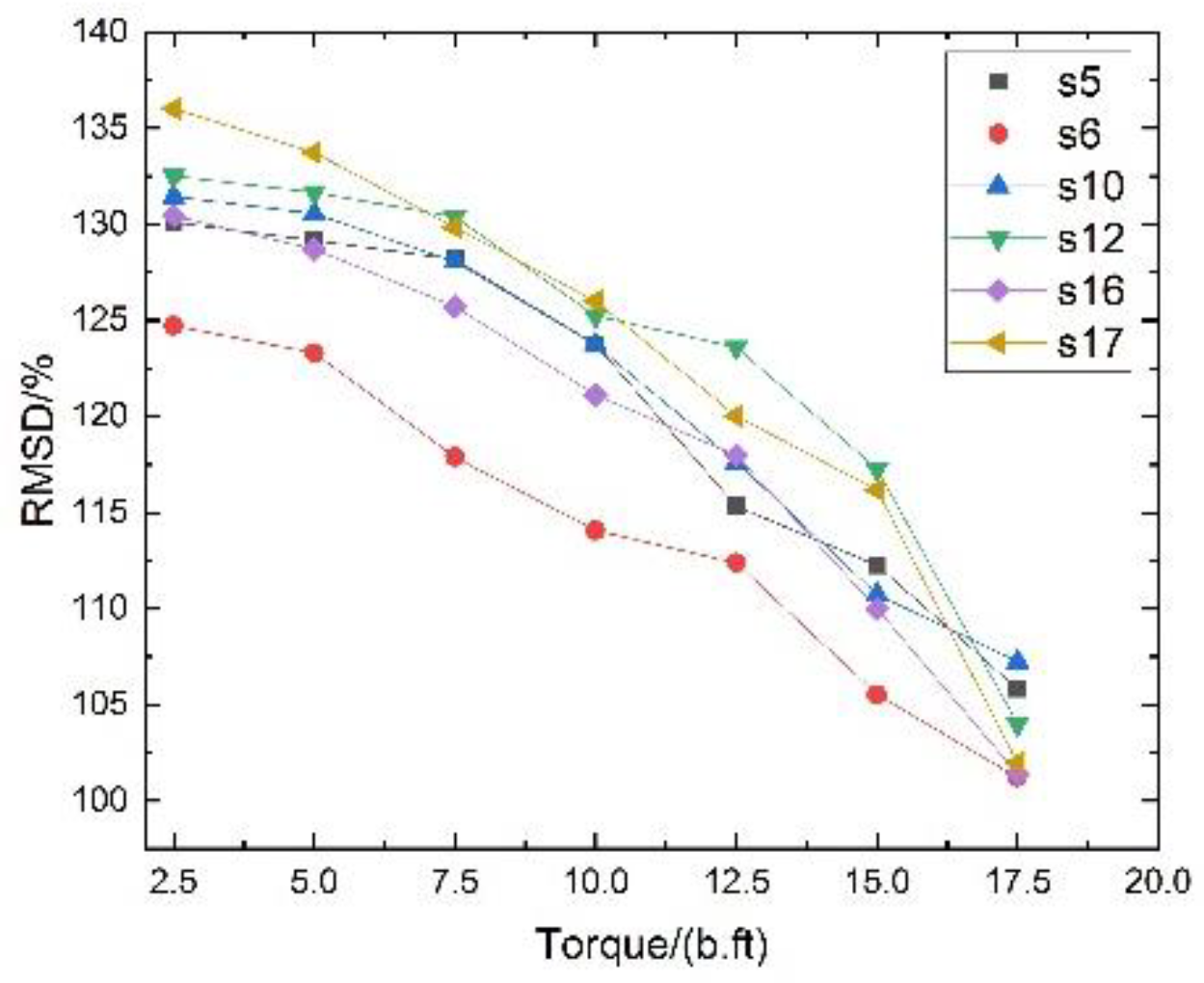
4.2. Experimental Results and Analysis Based on Wavelet Packet Analysis
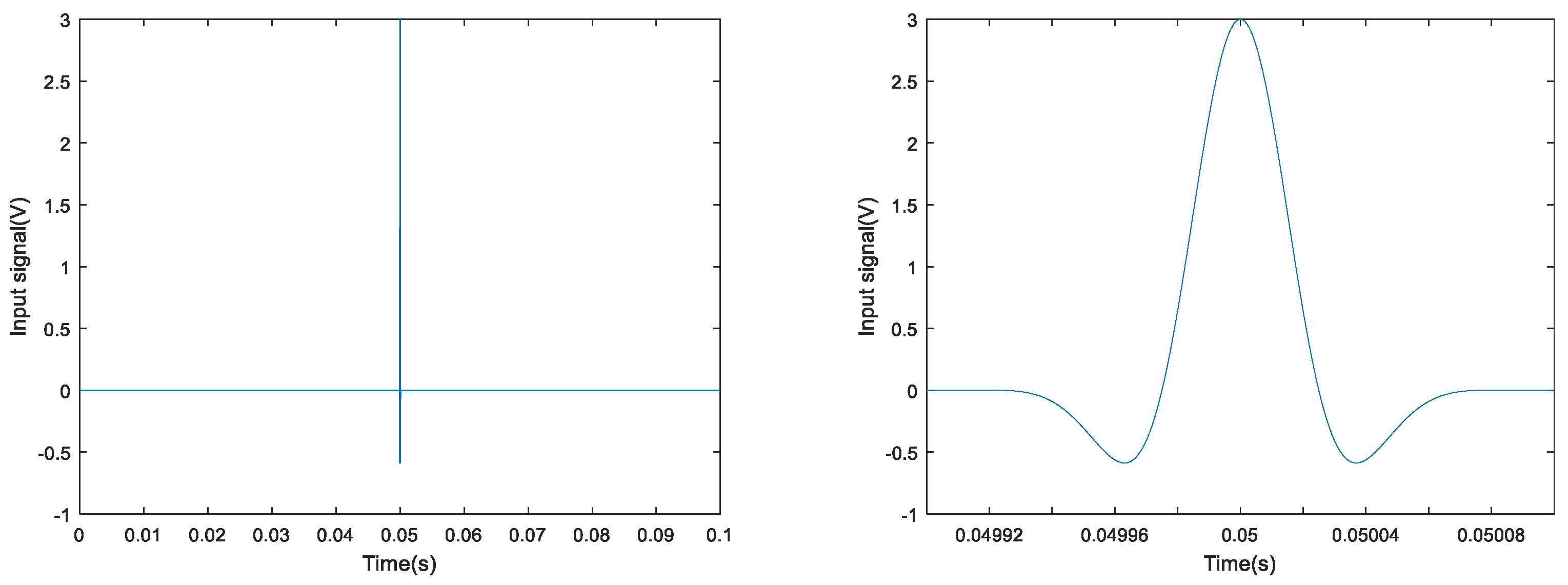
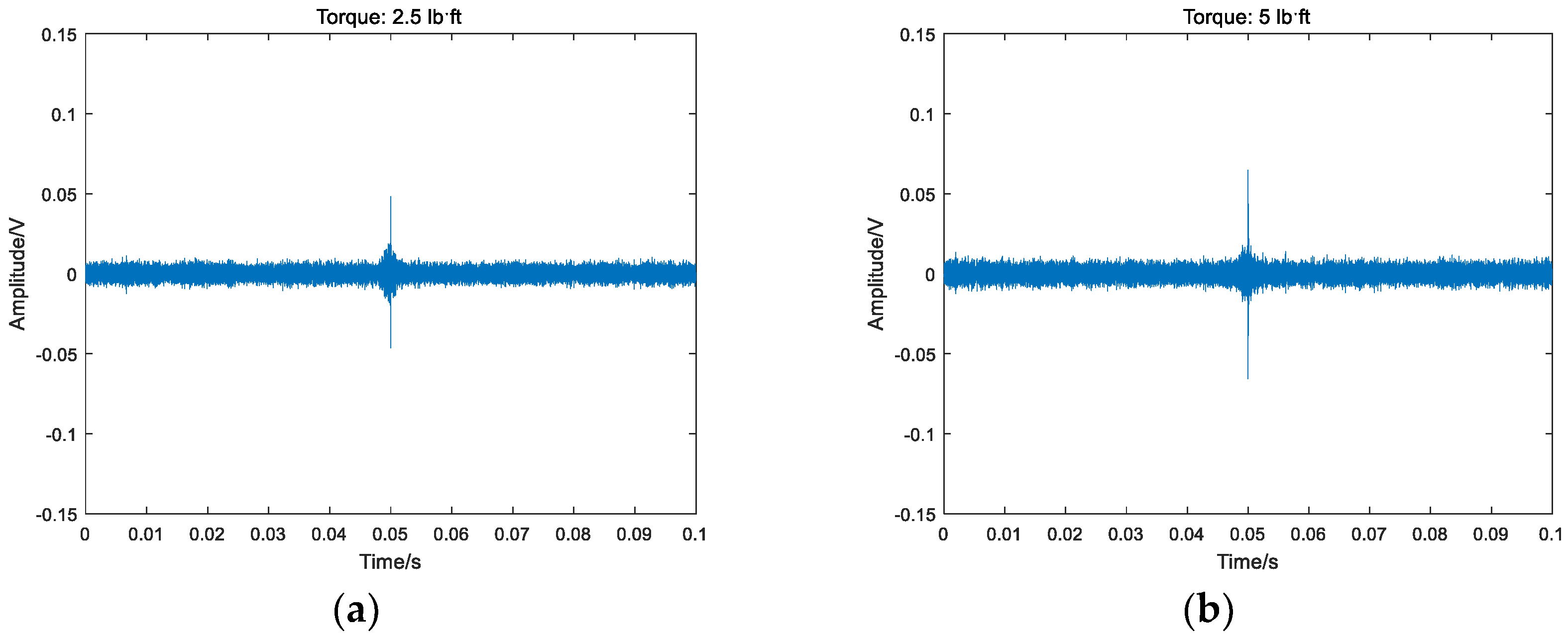
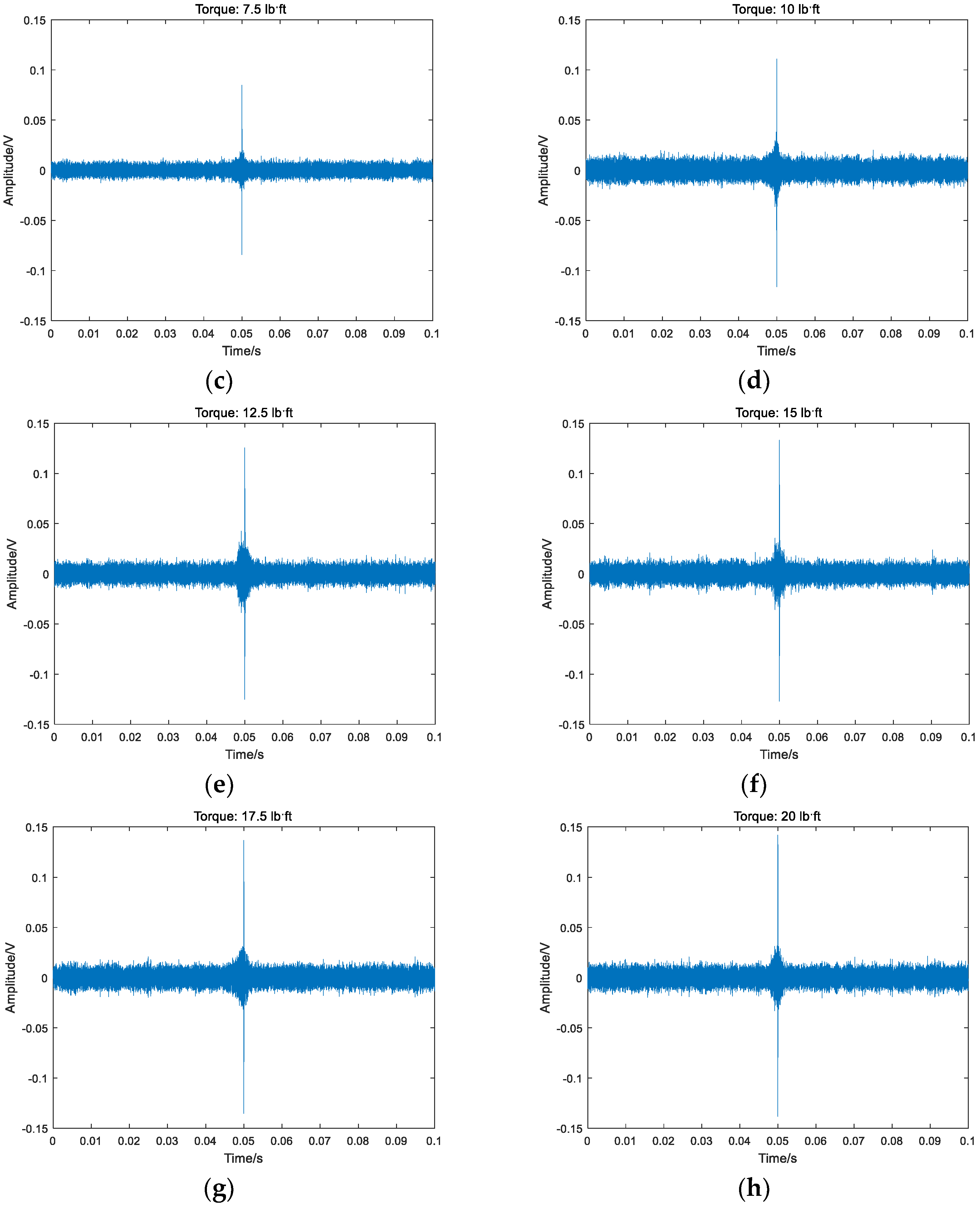
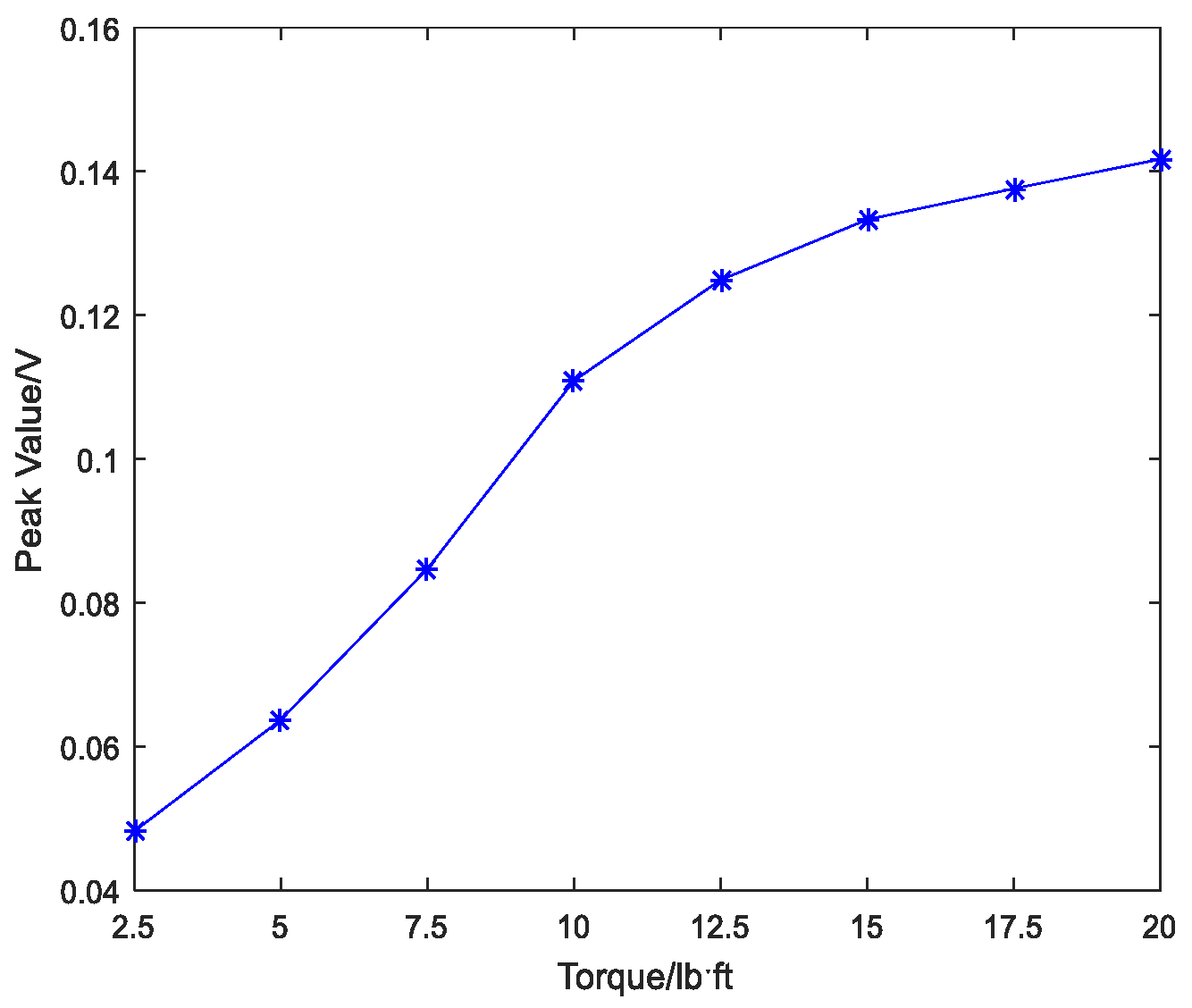
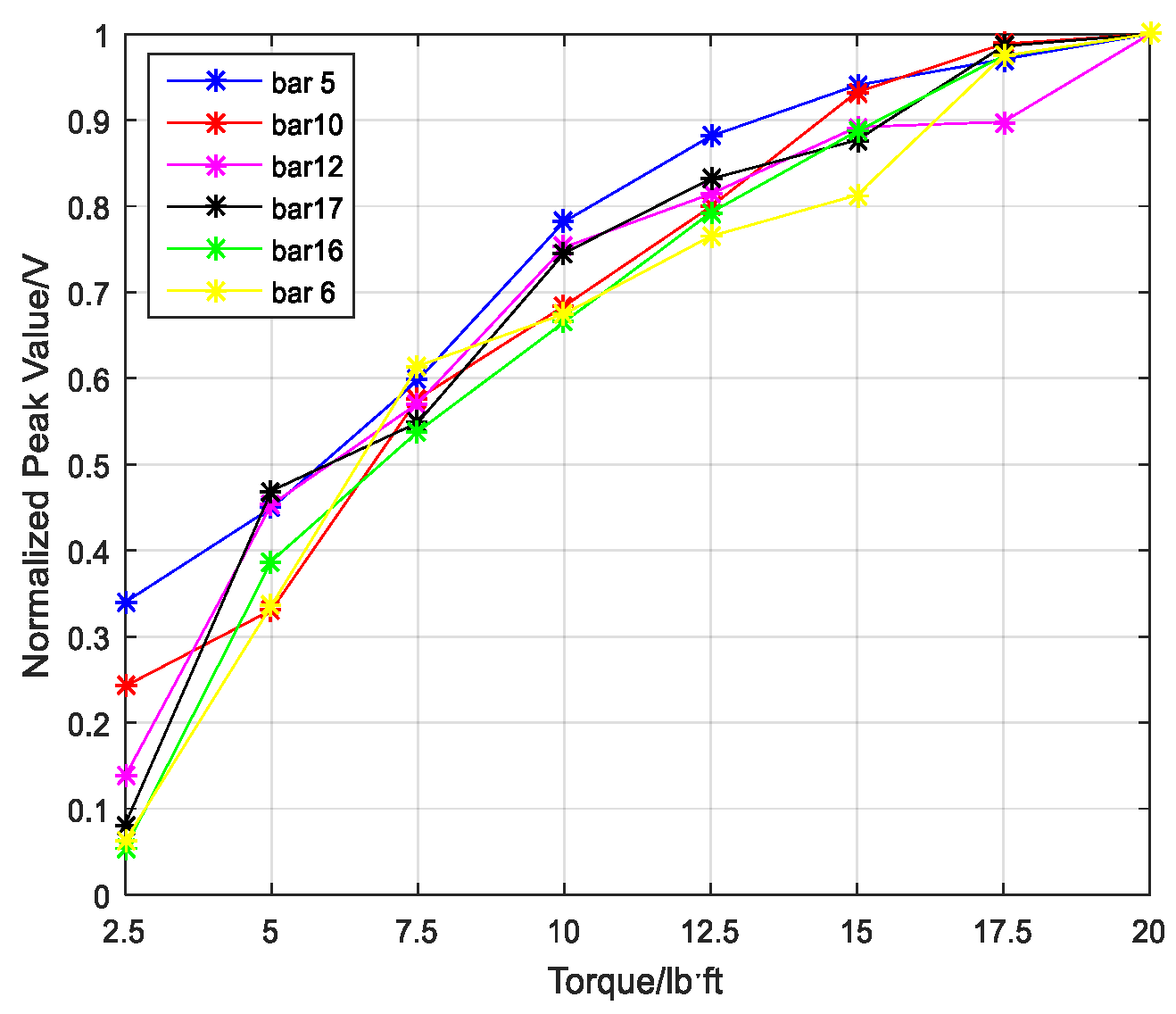
4.3. Experimental Results and Analysis Based on TR Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, Q.; Wang, H.; Qian, H.; Han, K.; Fan, F. Study on influence caused by bolt-connection defect on mechanical properties of bolt-ball joint. J. Harbin Inst. Technol. 2017, 49, 53–59. [Google Scholar]
- Liu, X.; Luo, Y. Safety assessment method of existing large span steel structures. J. Southeast Univ. 2008, 38, 709–712. [Google Scholar]
- Johnson, G.C.; Holt, A.C.; Cunningham, B. An ultrasonic method for determining axial stress in bolts. J. Test. Eval. 1986, 14, 253–259. [Google Scholar]
- Yasui, H.; Kawashima, K. Acoustoelastic measurement of bolt axial load with velocity ratio method. In Proceedings of the WCNDT, Roma, Italy, 15–21 October 2000. [Google Scholar]
- Conradi, M.S.; Miller, J.G.; Heyman, J.S. A transmission oscillator ultrasonic spectrometer. Rev. Sci. Instrum. 1974, 45, 358–360. [Google Scholar] [CrossRef]
- Deng, H.; Li, F.; Cai, Q.; Dong, J.; Fu, P. Experimental and numerical analysis on the slope change joint of a quartet-steel-tube-column transmission tower. Thin-Walled Struct. 2017, 119, 572–585. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Y.; Shi, Y.; Tan, Q. Experimental study on low-cycle fatigue fracture behavior of high strength steel beam-to-column connection. J. Build. Struct. 2018, 2, 28–36. [Google Scholar]
- Zhang, L.; Chen, W.; Du, S.; Shi, Y. Testing damage on the steel truss structure using the method of the sudden change coefficient of flexibility of curvature. J. Southeast Univ. 2005, 35, 133–138. [Google Scholar]
- Xu, J.; Hao, J.; Li, H.; Luo, M.; Guo, W.; Li, W. Experimental damage identification of a model reticulated shell. Appl. Sci. 2017, 7, 362. [Google Scholar] [CrossRef]
- Duan, H.; Li, S.; Liu, Y.; Yuan, X. Two-stage damage diagnosis approach for steel frame structures. J. Dalian Univ. Technol. 2011, 51, 7–13. [Google Scholar]
- Song, Y.; Liu, Z.; Ji, W. Damage diagnosis of spatial trusses based on modal strain energy and neural network. China Civ. Eng. J. 2007, 40, 13–18. [Google Scholar]
- Liu, C. Researches on the Method of Modal Identification and Damage Diagnosis of Spatial Lattice Structure Researches on the Method of Modal Identification. Ph.D. Thesis, Beijing University of Technology, Beijing, China, June 2014. [Google Scholar]
- Ding, Y. Discussion on design, construction and inspection of space grid structures and light-weight steel structures (Part I). Spat. Struct. 2004, 10, 31–40. [Google Scholar]
- Ding, Y.; Zhang, J.; Li, Z. Damage localization for long-span spatial lattice structures. J. Build. Struct. 2006, 27, 16–19. [Google Scholar]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Phil. Trans. R. Soc. Lond. A 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Song, G.; Wang, C.; Wang, B. Structural health monitoring (SHM) of civil structures. Appl. Sci. 2017, 7, 789. [Google Scholar] [CrossRef]
- Lim, T.W.; Kashangaki, T.A. Structural damage detection of space truss structures using best achievable eigenvectors. AIAA J. 1994, 32, 1049–1057. [Google Scholar] [CrossRef]
- Majumdar, A.; Maiti, D.K.; Maity, D. Damage assessment of truss structures from changes in natural frequencies using ant colony optimization. Appl. Math. Comput. 2012, 218, 9759–9772. [Google Scholar] [CrossRef]
- Osornio-Rios, R.A.; Amezquita-Sanchez, J.P.; Romero-Troncoso, R.J.; Garcia-Perez, A. Music-ann analysis for locating structural damages in a truss-type structure by means of vibrations. Comput.-Aided Civ. Infrastruct. Eng. 2012, 27, 687–698. [Google Scholar] [CrossRef]
- Curadelli, R.O.; Riera, J.D.; Ambrosini, D.; Amani, M.G. Damage detection by means of structural damping identification. Eng. Struct. 2008, 30, 3497–3504. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring: With Piezoelectric Wafer Active Sensors, 3rd ed.; Elsevier: Oxford, UK, 2007; pp. 56–59. [Google Scholar]
- Sohn, H.; Park, G.; Wait, J.R.; Limback, N.P.; Farrar, C.R. Wavelet-based active sensing for delamination detection in composite structures. Smart Mater. Struct. 2003, 13, 153. [Google Scholar] [CrossRef]
- Song, G.; Gu, H.; Mo, Y.L.; Hsu, T.T.C.; Dhonde, H. Concrete structural health monitoring using embedded piezoceramic transducers. Smart Mater. Struct. 2007, 16, 959. [Google Scholar] [CrossRef]
- Yan, S.; Sun, W.; Song, G.; Gu, H.; Huo, L.S.; Liu, B.; Zhang, Y.G. Health monitoring of reinforced concrete shear walls using smart aggregates. Smart Mater. Struct. 2009, 18, 047001. [Google Scholar] [CrossRef]
- Wang, T.; Song, G.; Wang, Z.; Li, Y. Proof-of-concept study of monitoring bolt connection status using a piezoelectric based active sensing method. Smart Mater. Struct. 2013, 22, 087001. [Google Scholar] [CrossRef]
- Liang, C.; Sun, F.P.; Rogers, C.A. Coupled electro-mechanical analysis of adaptive material systems-determination of the actuator power consumption and system energy transfer. J. Intell. Mater. Syst. Struct. 1997, 8, 335–343. [Google Scholar] [CrossRef]
- Wang, G. Analysis of bimorph piezoelectric beam energy harvesters using Timoshenko and Euler–Bernoulli beam theory. J. Intell. Mater. Syst. Struct. 2013, 24, 226–239. [Google Scholar] [CrossRef]
- Wu, H.; Tang, L.; Yang, Y.; Soh, C.K. A novel two-degrees-of-freedom piezoelectric energy harvester. J. Intell. Mater. Syst. Struct. 2013, 24, 357–368. [Google Scholar] [CrossRef]
- Song, G.; Zhou, X.; Binienda, W. Thermal deformation compensation of a composite beam using piezoelectric actuators. Smart Mater. Struct. 2003, 13, 30. [Google Scholar] [CrossRef]
- Song, G.; Qiao, P.Z.; Binienda, W.K.; Zou, G.P. Active vibration damping of composite beam using smart sensors and actuators. J. Aerosp. Eng. 2002, 15, 97–103. [Google Scholar] [CrossRef]
- Lu, G.; Feng, Q.; Li, Y.; Wang, H.; Song, G. Characterization of ultrasound energy diffusion due to small-size damage on an aluminum plate using piezoceramic transducers. Sensors 2017, 17, 2796. [Google Scholar] [CrossRef] [PubMed]
- Song, G.; Gu, H. Active vibration suppression of a smart flexible beam using a sliding mode based controller. J. Vib. Control 2007, 13, 1095–1107. [Google Scholar] [CrossRef]
- Zhu, J.; Ho, S.C.M.; Patil, D.; Wang, N.; Hirsch, R.; Song, G. Underwater pipeline impact localization using piezoceramic transducers. Smart Mater. Struct. 2017, 26, 107002. [Google Scholar] [CrossRef]
- Hu, X.; Zhu, H.; Wang, D. A study of concrete slab damage detection based on the electromechanical impedance method. Sensors 2014, 14, 19897–19909. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Divsholi, B.S.; Soh, C.K. A reusable PZT transducer for monitoring initial hydration and structural health of concrete. Sensors 2010, 10, 5193–5208. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Wang, Q.; Wang, H.; Zhu, H. Experimental study on damage detection in timber specimens based on an electromechanical impedance technique and RMSD-based mahalanobis distance. Sensors 2016, 16, 1765. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Yang, Y. Wave propagation modeling of the PZT sensing region for structural health monitoring. Smart Mater. Struct. 2007, 16, 706. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, H.; Annamdas, V.G.M.; Soh, C.K. Monitoring damage propagation using PZT impedance transducers. Smart Mater. Struct. 2009, 18, 045003. [Google Scholar] [CrossRef]
- Annamdas, V.G.M.; Yang, Y.; Soh, C.K. Impedance based concrete monitoring using embedded PZT sensors. Int. J. Civ. Struct. Eng. 2010, 1, 414. [Google Scholar]
- Yang, Y.; Annamdas, V.G.M.; Wang, C.; Zhou, Y. Application of multiplexed FBG and PZT impedance sensors for health monitoring of rocks. Sensors 2008, 8, 271–289. [Google Scholar] [CrossRef] [PubMed]
- Kong, Q.; Fan, S.; Bai, X.; Mo, Y.L.; Song, G. A novel embeddable spherical smart aggregate for structural health monitoring: Part I. Fabrication and electrical characterization. Smart Mater. Struct. 2017, 26, 095050. [Google Scholar] [CrossRef]
- Kong, Q.; Fan, S.; Mo, Y.L.; Song, G. A novel embeddable spherical smart aggregate for structural health monitoring: Part II. Numerical and experimental verifications. Smart Mater. Struct. 2017, 26, 095051. [Google Scholar] [CrossRef]
- Park, H.W.; Sohn, H.; Law, K.H.; Farrar, C.R. Time reversal active sensing for health monitoring of a composite plate. J. Sound Vib. 2007, 302, 50–66. [Google Scholar] [CrossRef]
- Liao, W.I.; Wang, J.X.; Song, G.; Gu, H.; Olmi, C.; Mo, Y.L.; Loh, C.H. Structural health monitoring of concrete columns subjected to seismic excitations using piezoceramic-based sensors. Smart Mater. Struct. 2011, 20, 125015. [Google Scholar] [CrossRef]
- Yin, H.; Wang, T.; Yang, D.; Liu, S.; Shao, J.; Li, Y. A smart washer for bolt looseness monitoring based on piezoelectric active sensing method. Appl. Sci. 2016, 6, 320. [Google Scholar] [CrossRef]
- Du, G.; Kong, Q.; Zhou, H.; Gu, H. Multiple cracks detection in pipeline using damage index matrix based on piezoceramic transducer-enabled stress wave propagation. Sensors 2017, 17, 1812. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Yun, C.B.; Roh, Y.; Lee, J.J. PZT-based active damage detection techniques for steel bridge components. Smart Mater. Struct. 2006, 15, 957. [Google Scholar] [CrossRef]
- Dumoulin, C.; Deraemaeker, A. Real-time fast ultrasonic monitoring of concrete cracking using embedded piezoelectric transducers. Smart Mater. Struct. 2017, 26, 104006. [Google Scholar] [CrossRef]
- Kong, Q.; Robert, R.H.; Silva, P.; Mo, Y.L. Cyclic crack monitoring of a reinforced concrete column under simulated pseudo-dynamic loading using piezoceramic-based smart aggregates. Appl. Sci. 2016, 6, 341. [Google Scholar] [CrossRef]
- Xu, K.; Kong, Q.; Chen, S.; Song, G. Early detection of the presence of low strength concrete in reinforced concrete beam-column joints using piezoceramic based transducers. IEEE Sens. J. 2017, 17, 3244–3250. [Google Scholar] [CrossRef]
- Jiang, T.; Kong, Q.; Wang, W.; Huo, L.; Song, G. Monitoring of grouting compactness in a post-tensioning tendon duct using piezoceramic transducers. Sensors 2016, 16, 1343. [Google Scholar] [CrossRef] [PubMed]
- Taghavipour, S.; Kharkovsky, S.; Kang, W.H.; Samali, B.; Mirza, O. Detection and monitoring of flexural cracks in reinforced concrete beams using mounted smart aggregate transducers. Smart Mater. Struct. 2017, 26, 104009. [Google Scholar] [CrossRef]
- Jiang, T.; Kong, Q.; Patil, D.; Luo, Z.; Huo, L.; Song, G. Detection of debonding between fiber reinforced polymer bar and concrete structure using piezoceramic transducers and wavelet packet analysis. IEEE Sens. J. 2017, 17, 1992–1998. [Google Scholar] [CrossRef]
- Xu, B.; Zhang, T.; Song, G.; Gu, H. Active interface debonding detection of a concrete-filled steel tube with piezoelectric technologies using wavelet packet analysis. Mech. Syst. Signal Process. 2013, 36, 7–17. [Google Scholar] [CrossRef]
- Du, G.; Kong, Q.; Wu, F.; Ruan, J.; Song, G. An experimental feasibility study of pipeline corrosion pit detection using a piezoceramic time reversal mirror. Smart Mater. Struct. 2016, 25, 037002. [Google Scholar] [CrossRef]
- Liang, Y.; Li, D.; Kong, Q.; Song, G. Load monitoring of the pin-connected structure using time reversal technique and piezoceramic transducers—A feasibility study. IEEE Sens. J. 2016, 16, 7958–7966. [Google Scholar] [CrossRef]
- Sun, Z.; Chang, C.C. Structural damage assessment based on wavelet packet transform. J. Struct. Eng. 2002, 128, 1354–1361. [Google Scholar] [CrossRef]
- Sun, Z.; Chang, C.C. Structural degradation monitoring using covariance-driven wavelet packet signature. Struct. Health Monit. 2003, 2, 309–325. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, C.; Song, G. Health status monitoring of cuplock scaffold joint connection based on wavelet packet analysis. Shock Vib. 2015, 2015, 1070–9622. [Google Scholar] [CrossRef]
- Fink, M. Time reversal of ultrasonic fields. I. Basic principles. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1992, 39, 555–566. [Google Scholar] [CrossRef] [PubMed]
- Fink, M. Time-reversal mirrors. J. Phys. D Appl. Phys. 1993, 26, 1333. [Google Scholar] [CrossRef]
- Ing, R.K.; Fink, M. Time recompression of dispersive Lamb waves using a time reversal mirror-application to flaw detection in thin plates. In Proceedings of the Ultrasonics Symposium, San Antonio, TX, USA, 3–6 November 1996. [Google Scholar]
- Zhang, L.; Wang, C.; Huo, L.; Song, G. Health monitoring of cuplok scaffold joint connection using piezoceramic transducers and time reversal method. Smart Mater. Struct. 2016, 25, 035010. [Google Scholar] [CrossRef]
- Wang, T.; Liu, S.; Shao, J.; Li, Y. Health monitoring of bolted joints using the time reversal method and piezoelectric transducers. Smart Mater. Struct. 2016, 25, 025010. [Google Scholar]
- Parvasi, S.M.; Ho, S.C.M.; Kong, Q.; Mousavi, R.; Song, G. Real time bolt preload monitoring using piezoceramic transducers and time reversal technique—A numerical study with experimental verification. Smart Mater. Struct. 2016, 25, 085015. [Google Scholar] [CrossRef]
- Yang, J.; Chang, F.K. Detection of bolt loosening in C–C composite thermal protection panels: I. Diagnostic principle. Smart Mater. Struct. 2006, 15, 581. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grade of Steel | Elastic Modulus (GPa) | Yield Strengths (MPa) | Steel Density (Kg/m3) | Poisson’s Ratio | Elongation |
|---|---|---|---|---|---|
| Q345 | 207 | 345 | 7800 | 0.3 | 30% |
| Tightness Degree | First | Second | Third | Fourth | Fifth | Sixth | Seventh | Eighth |
|---|---|---|---|---|---|---|---|---|
| Torque () | 2.5 | 5 | 7.5 | 10 | 12.5 | 15 | 17.5 | 20 |
| Frequency Bandwidth | Amplitude | Period | Sampling Frequency |
|---|---|---|---|
| 1000 Hz–400 kHz | 150 V | 1 s | 2 MHz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wang, C.; Li, H.; Zhang, C.; Hao, J.; Fan, S. Health Monitoring of Bolted Spherical Joint Connection Based on Active Sensing Technique Using Piezoceramic Transducers. Sensors 2018, 18, 1727. https://0-doi-org.brum.beds.ac.uk/10.3390/s18061727
Xu J, Wang C, Li H, Zhang C, Hao J, Fan S. Health Monitoring of Bolted Spherical Joint Connection Based on Active Sensing Technique Using Piezoceramic Transducers. Sensors. 2018; 18(6):1727. https://0-doi-org.brum.beds.ac.uk/10.3390/s18061727
Chicago/Turabian StyleXu, Jing, Chenyu Wang, Hongnan Li, Chunwei Zhang, Jiajia Hao, and Shuli Fan. 2018. "Health Monitoring of Bolted Spherical Joint Connection Based on Active Sensing Technique Using Piezoceramic Transducers" Sensors 18, no. 6: 1727. https://0-doi-org.brum.beds.ac.uk/10.3390/s18061727