Towards an Autonomous Industry 4.0 Warehouse: A UAV and Blockchain-Based System for Inventory and Traceability Applications in Big Data-Driven Supply Chain Management †




Abstract
:1. Introduction
- This is one of the first articles where design and testing of an RFID-based drone for performing inventory tasks are described. In fact, we have not found in the literature any other solution that makes use of a similar identification technology.
- Besides recent literature on blockchain-based autonomous business activity for UAVs [23], to our knowledge, this article is the first that proposes the theoretical design and practical implementation of a UAV-based, versatile, modular and scalable architecture aimed at fostering cyber security (specially, data integrity and redundancy) by including together the use of blockchain and a decentralized database solution. Specifically, the proposed system can use a blockchain to receive the inventory data collected by UAVs, validate them, ensure their trustworthiness and make them available to the interested parties. Moreover, the system is able to use smart contracts to automate certain processes without human intervention.
- We also evaluated the performance of the proposed decentralized database and the implemented smart contracts in diverse scenarios.
2. Related Work
- A labelling technology: items need to be attached to tags or labels that are associated with a unique identifier and, in some cases, with additional information on the item.
- An identification technology: the labels or tags attached to the items have to be read remotely to automate the inventory processes.
- A UAV: although most labelling technologies make use of handheld readers, this article proposes the use of a UAV to automate and to accelerate data gathering.
- Supply management techniques: data gathering, processing and storing processes need to be efficient when handling a relevant number of information.
2.1. Labelling and Identification Technologies
2.2. UAVs for Inventory and Traceability Applications
2.3. Big Data for Inventory and Supply Chain Management
2.4. Analysis of the State of The Art
- Data volume. The amount of heterogeneous data generated by Industry 4.0 technologies has increased exponentially, especially the information collected from Industrial Internet of Things (IIoT) devices and remote entities. These data have to be hosted, distributed and computed across a number of organizations ensuring a certain degree of operational efficiency.
- Speed. Decisions should be made as quickly as possible (ideally, in real time), so there is a need for speeding up the processes related to them: data production, data collection, reliability, data transfer speed, data storage efficiency, knowledge extraction and analysis, as well as decision-making.
- Verification and veracity. There is a myriad of factors that may derive into collecting bad data (e.g., noise, inaccurate readings), so they should be verified so that only valid or true data are further processed.
- Versioning. Massive datasets should be linked and the accidental disappearance of important data should be prevented.
- Accessibility. Stakeholders must be able to access data through resilient networks, which enable persistent availability with or without Internet connectivity.
3. Design of the System
- Transparency. Blockchain and smart contracts allow for providing access to inventory and traceability information to third-parties, which can monitor it and determine whether it has been tampered with.
- Application decentralization. Medium and large software deployments usually require to make use of centralized servers that are often expensive to deploy and maintain [69,70]. Blockchain is one of the technologies that enable application decentralization and, at the same time, avoids the involvement of middlemen that provide outsourced centralized solutions.
- Data authenticity. In many industries, it is essential to trust the inventory and traceability data received from suppliers, manufacturers or governments. Blockchain enables to implement mechanisms that provide accountability and, as a consequence, trustworthiness. In addition, it is worth noting that such data trustworthiness is essential for the effectiveness of the application of Big Data techniques.
- Data security. Blockchain allows for preserving the privacy and anonymity of the data exchanged with other entities, so that they remain private to non-authorized parties.
- Operational efficiency. Blockchain technologies are able to automate the verification of the attributes of a transaction in an inexpensive way.
- Redundancy. Decentralized storage systems, when properly synchronized, are able to create copies of the stored data automatically in multiple nodes, so the information is not available from a single source that may constitute a point of failure.
- Tolerance to cyber-attacks. Since the information can be available from multiple data storage nodes, if one or several of them are taken down by cyber-attacks (e.g., Denial of Service (DoS) or Distributed Denial of Service (DDoS) attacks), it may be possible to access it through the other nodes.
- Ability to run decentralized applications (dApps). Besides pure file storage, it is possible to develop and deploy dApps that provide the previously mentioned features (i.e., redundancy and increased security). In addition, it is possible to develop dApps that run on decentralized storage systems while cooperating with a blockchain [71].
4. Implementation
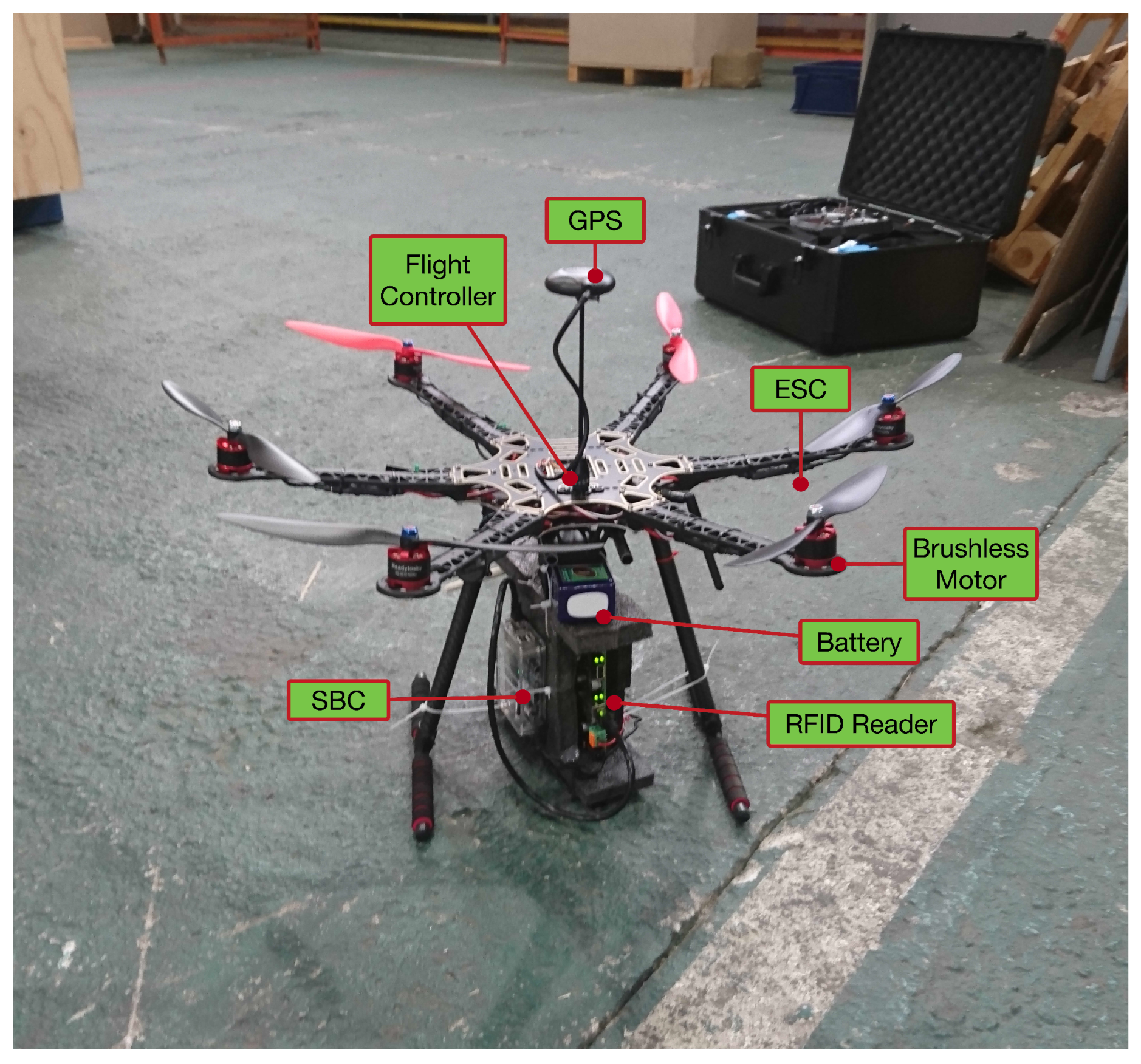
4.1. UAV Implementation
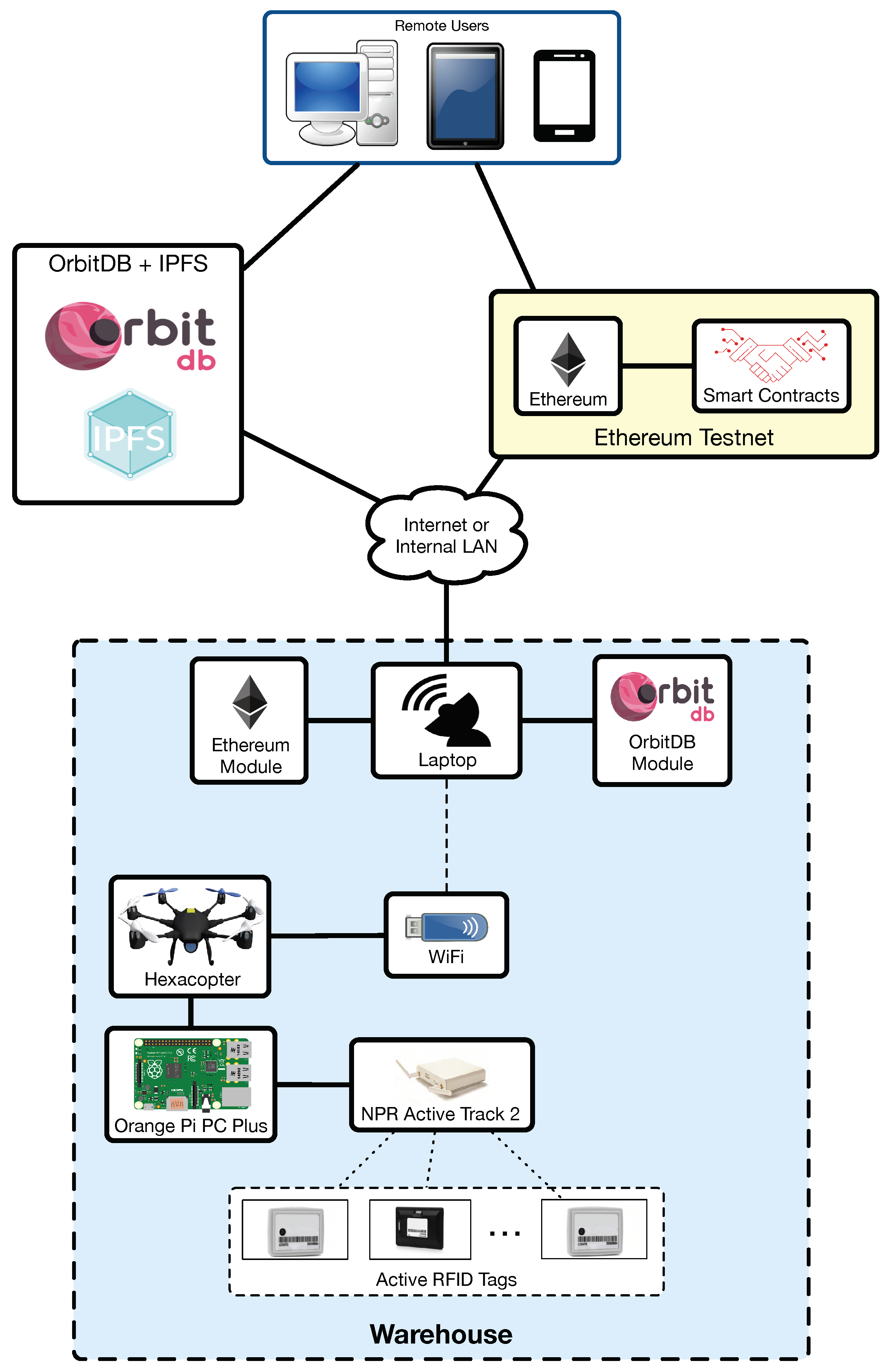
4.2. Implemented Architecture
- It keeps every version of the files, making it simple to set up resilient networks.
- It removes duplication across the network, therefore saving in storage. Each network node stores only content it is interested in and some indexing information that helps to figure out who is storing what.
- Each file and all of the blocks within it are given a unique fingerprint (i.e., cryptographic hash).
- Every file can be found in an user-friendly way (e.g., by human-readable names) using a decentralized naming system called Inter-Planetary Name System (IPNS).
- It has no single point of failure and nodes do not need to trust each other.
- log: an immutable (append-only) log with traceable history. Useful for “latest N” use cases or as a message queue.
- lfeed: a mutable log with traceable history. Entries can be added and removed.
- keyvalue: a key-value database.
- docs: a document database where JSON documents can be stored and indexed by a specified key. Useful for building search indices or version controlling documents and data.
- counter: Useful for counting events separate from log/feed data.
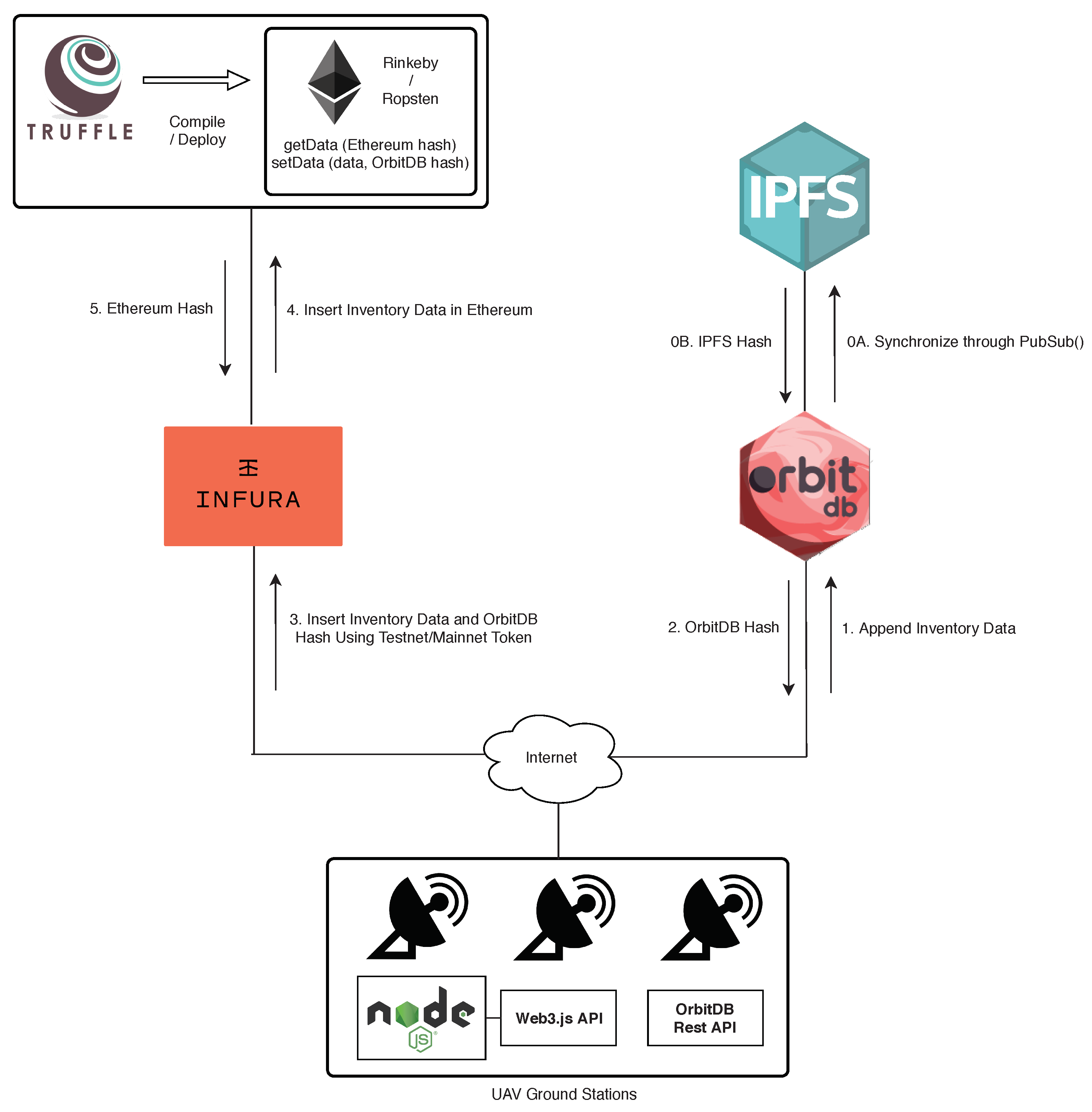
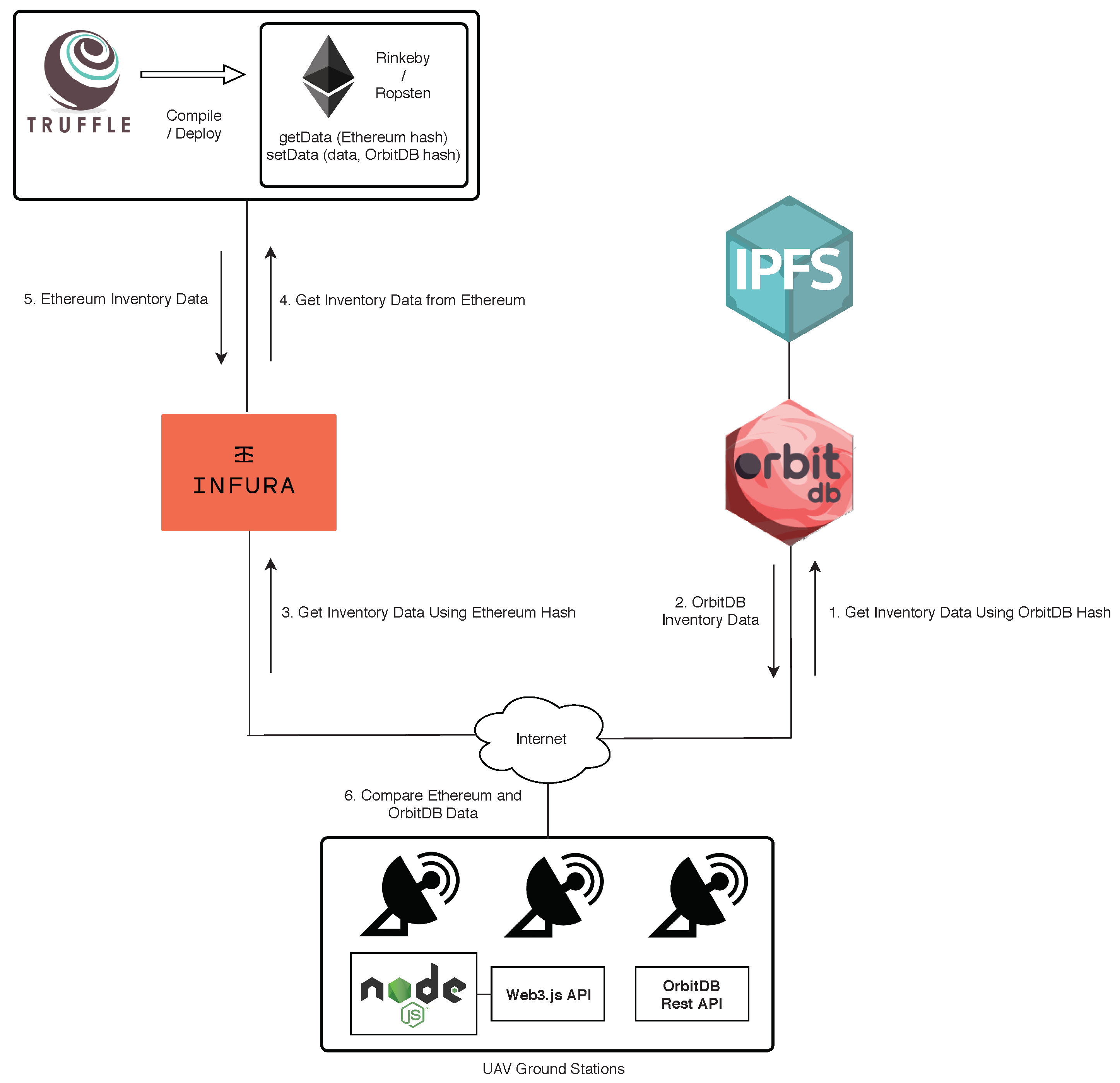
4.3. Inventory Data Insertion and Reading Processes
- Infura [83]: it provides an easy to use HTTP API for accessing Ethereum that can be even implemented by resource-constraint IoT devices.
- Node.js [84]: it is an open-source platform that allows for executing JavaScript code outside of a browser.
- Web3 Javascript API [85]: It is a collection of libraries that allow for interacting with Ethereum nodes. In the proposed architecture, the Web3 API is called from a Node.js instance that exchanges requests that are handled by Infura.
- Information integrity can be verified by checking its hash. In addition, Ethereum and OrbitDB act as timestamping services, so it can be easily verified when the data were inserted.
- Since the data stored on the blockchain cannot be tampered without leaving a trace, the authenticity of the inventory information stored on OrbitDB can be easily checked.
- Every user transaction within OrbitDB is protected by asymmetric cryptography mechanisms that make use of a public and a private key.
- Similarly, the data that is exchanged with Ethereum are managed by Infura, which protects them through an API key and a secret key.
5. Experiments
5.1. Experimental Scenario
5.2. Inventory Time
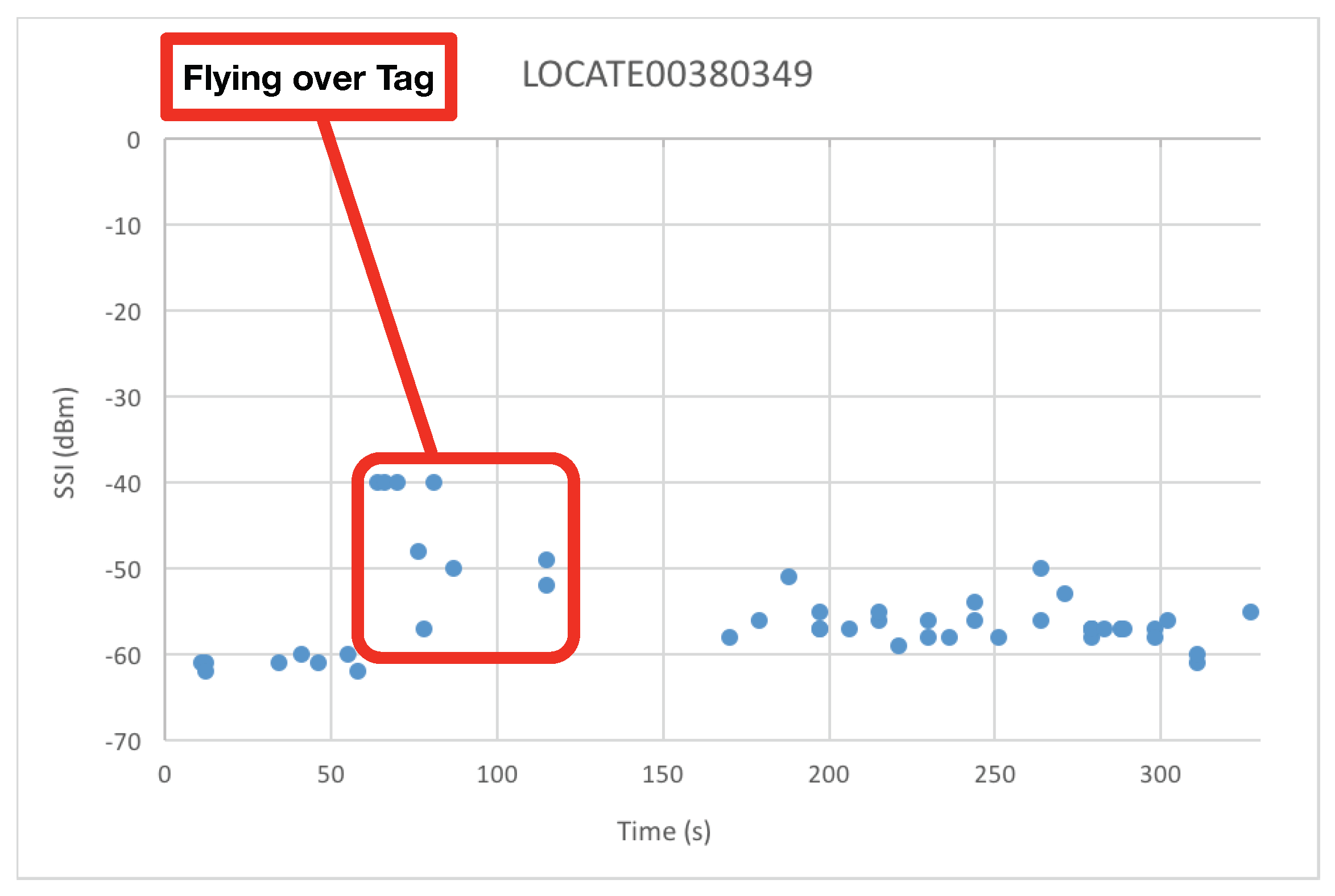
5.3. Signal Strength Monitoring
5.4. Performance of the Implemented Architecture
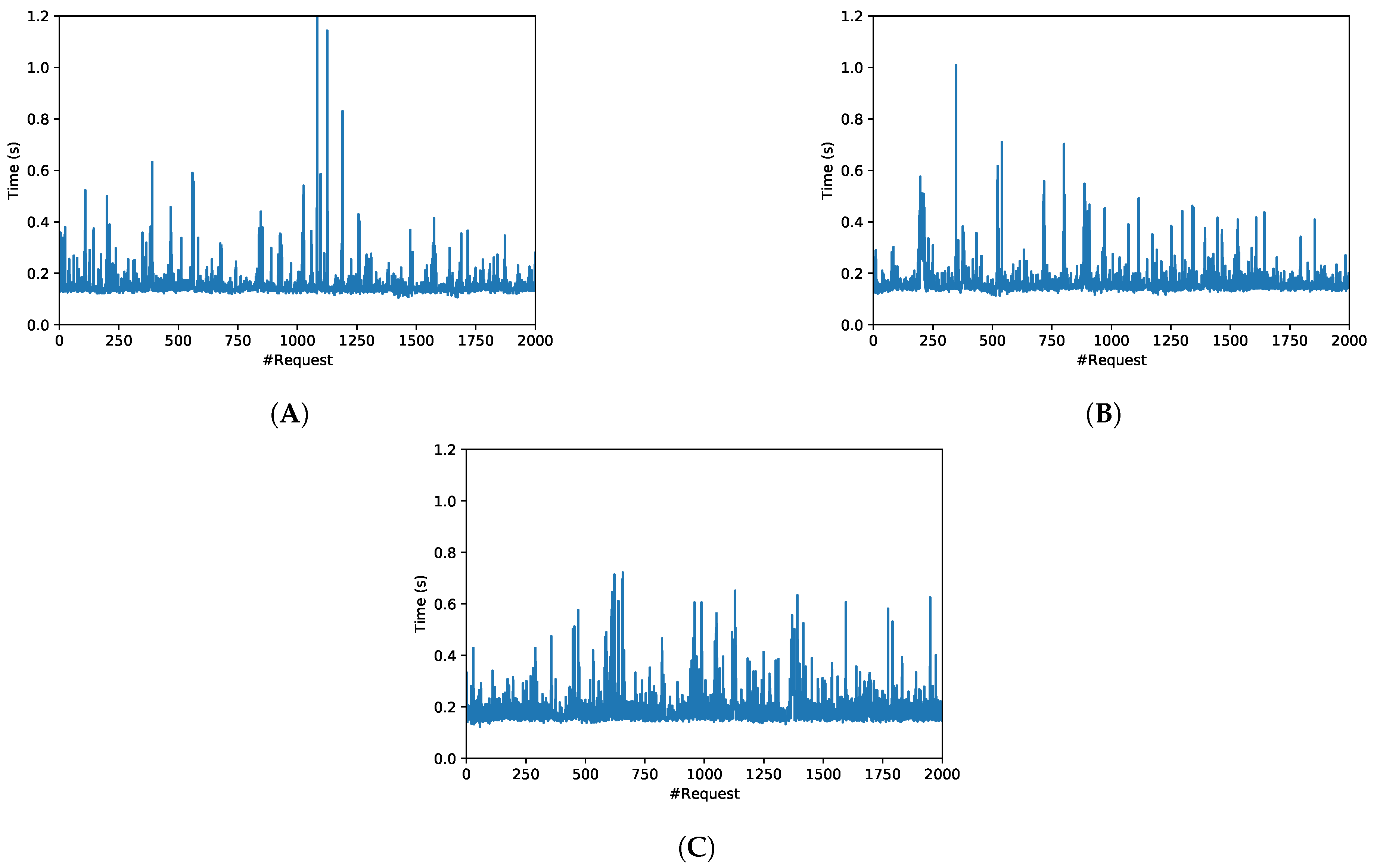
5.4.1. Performance of the Decentralized Database
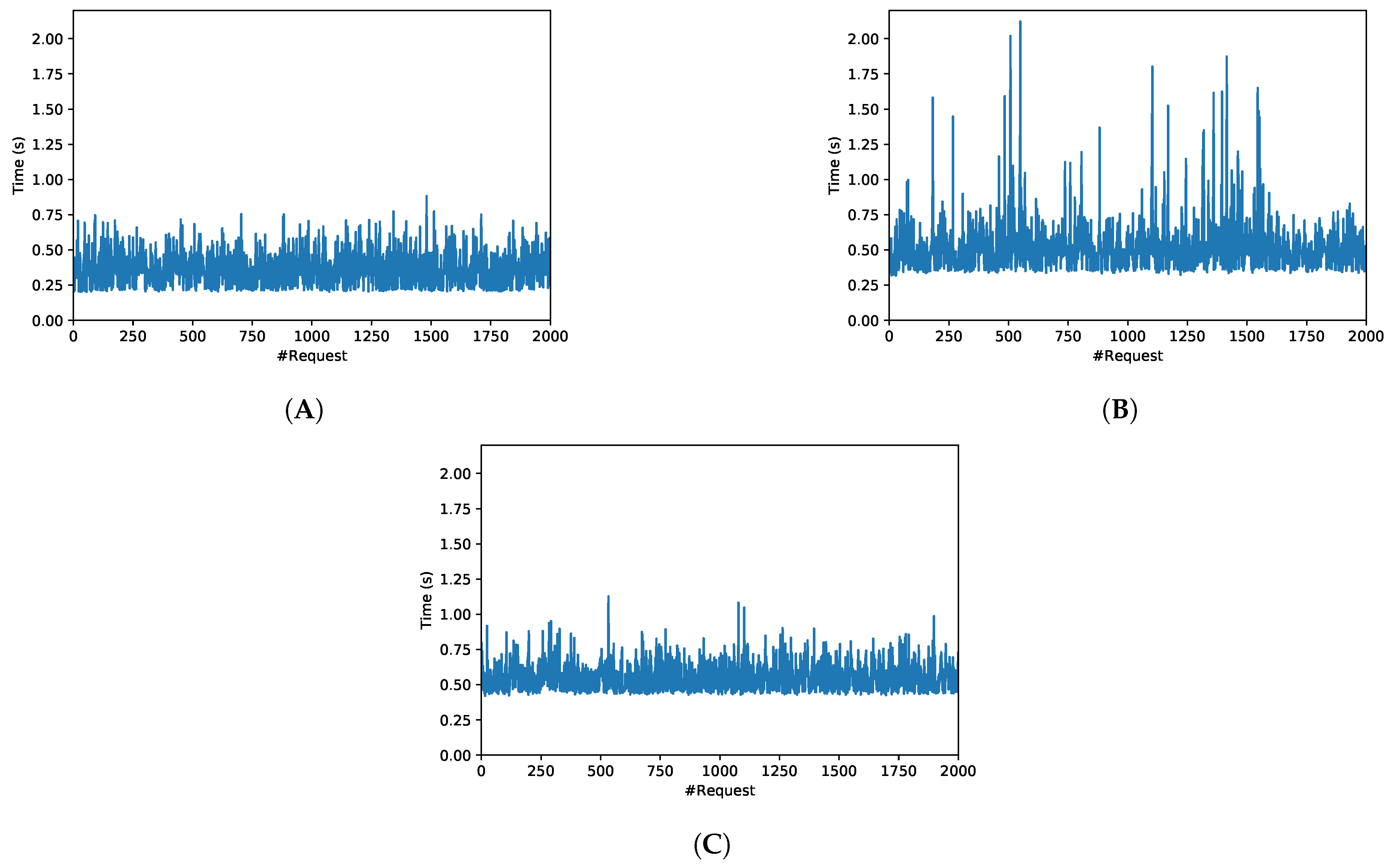
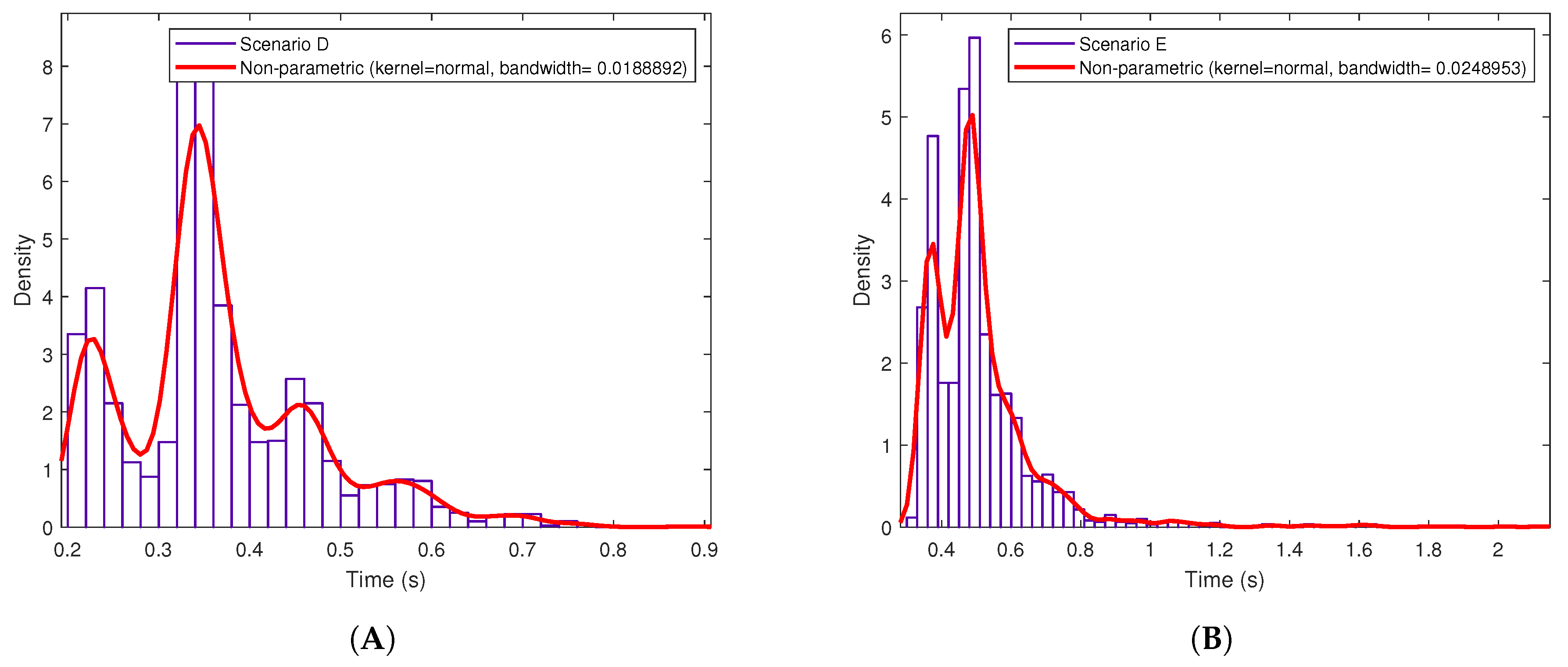
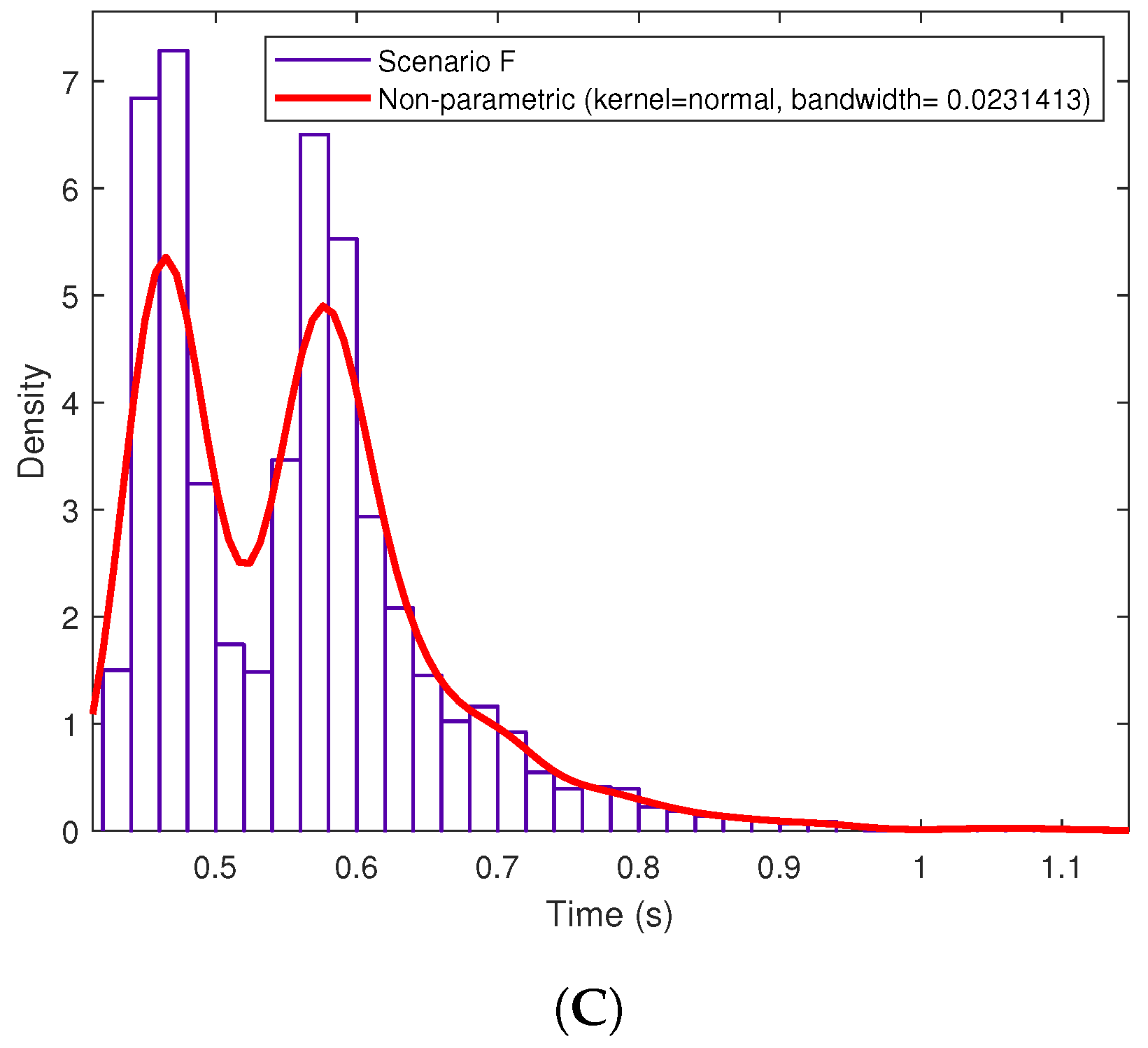
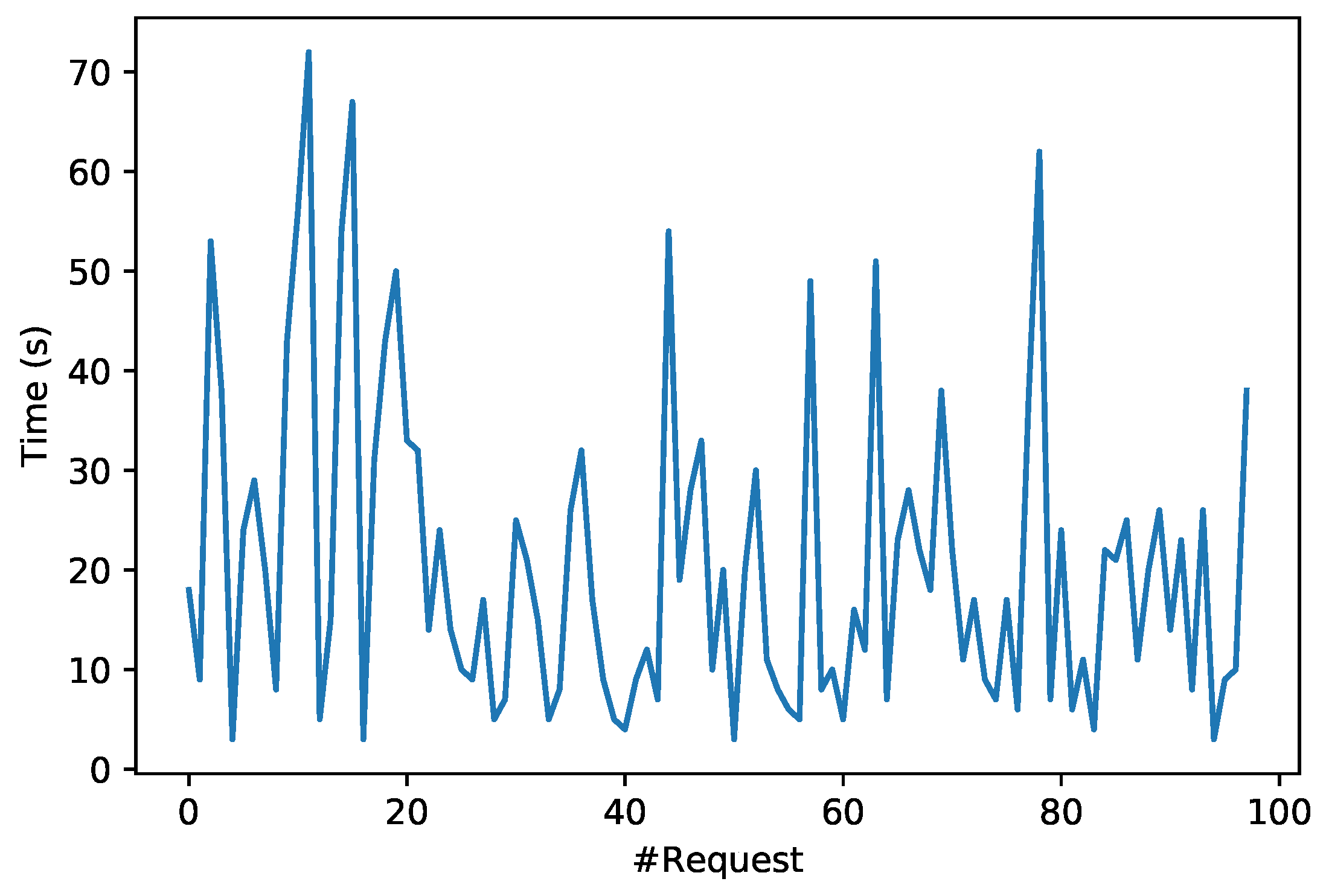
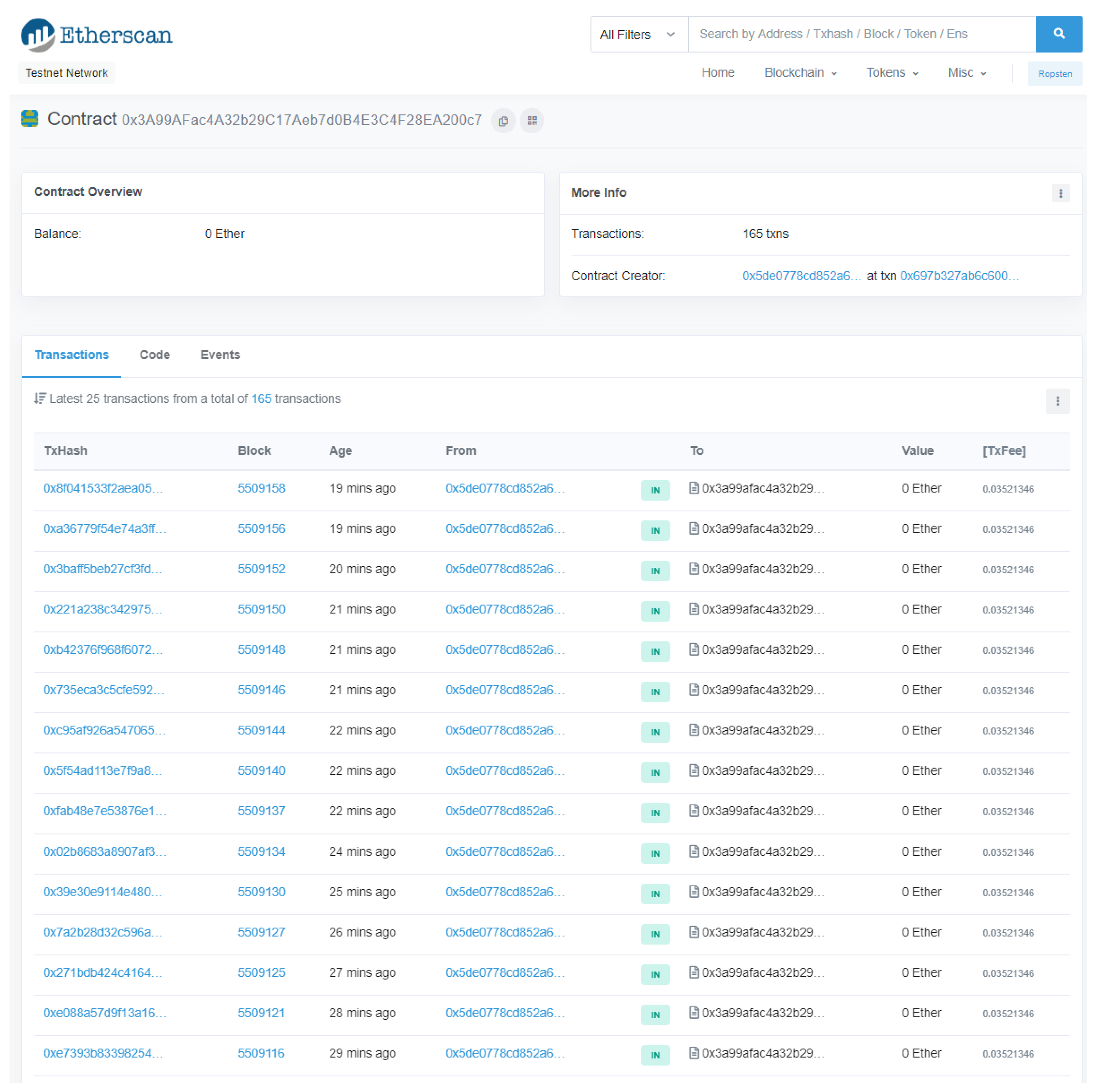
5.4.2. Performance of The Blockchain
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Qi, Q.; Tao, F. Digital Twin and Big Data Towards Smart Manufacturing and Industry 4.0: 360 Degree Comparison. IEEE Access 2018, 6, 3585–3593. [Google Scholar] [CrossRef]
- Blanco-Novoa, Ó.; Fernández-Caramés, T.M.; Fraga-Lamas, P.; Vilar-Montesinos, M.A. A Practical Evaluation of Commercial Industrial Augmented Reality Systems in an Industry 4.0 Shipyard. IEEE Access 2018, 6, 8201–8218. [Google Scholar] [CrossRef]
- Wohlgemuth, W.; Triebfürst, G. ARVIKA: Augmented Reality for development, production and service. In Proceedings of the DARE 2000, Elsinore, Denmark, 12–14 April 2000. [Google Scholar]
- Friedrich, W. ARVIKA-Augmented Reality for Development, Production and Service. In Proceedings of the International Symposium on Mixed and Augmented Reality, Darmstadt, Germany, 30 September–1 October 2002; pp. 3–4. [Google Scholar]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Blanco-Novoa, Ó.; Vilar-Montesinos, M.A. A Review on Industrial Augmented Reality Systems for the Industry 4.0 Shipyard. IEEE Access 2018, 6, 13358–13375. [Google Scholar] [CrossRef]
- Robla-Gómez, S.; Becerra, V.M.; Llata, J.R.; González-Sarabia, E.; Torre-Ferrero, C.; Pérez-Oria, J. Working Together: A Review on Safe Human-Robot Collaboration in Industrial Environments. IEEE Access 2017, 5, 26754–26773. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Díaz-Bouza, M.A. A Fog Computing Based Cyber-Physical System for the Automation of Pipe-Related Tasks in the Industry 4.0 Shipyard. Sensors 2018, 18, 1961. [Google Scholar] [CrossRef]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepalli, S. Fog Computing and its Role in the Internet of Things. In Proceedings of the First Edition of the MCC Workshop on Mobile Cloud Computing, Helsinki, Finland, 13–17 August 2012; pp. 13–16. [Google Scholar]
- Fernández-Caramés, T.M.; Fraga-Lamas, P.; Suárez-Albela, M.; Vilar-Montesinos, M. A Fog Computing and Cloudlet Based Augmented Reality System for the Industry 4.0 Shipyard. Sensors 2018, 18, 1798. [Google Scholar] [CrossRef]
- Xu, L.D.; He, W.; Li, S. Internet of Things in Industries: A Survey. IEEE Trans. Ind. Inform. 2014, 10, 2233–2243. [Google Scholar] [CrossRef]
- Wang, G.; Gunasekaran, A.; Ngai, E.W.; Papadopoulos, T. Big data analytics in logistics and supply chain management: Certain investigations for research and applications. Int. J. Prod. Econ. 2016, 176, 98–110. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.; Al-Fuqaha, A.I.; Dou, Z.; Almaita, E.; Khalil, I.M.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles: A Survey on Civil Applications and Key Research Challenges. arXiv 2018, arXiv:1805.00881. [Google Scholar] [CrossRef]
- Hassanalian, M.; Abdelkefi, A. Classifications, applications, and design challenges of drones: A review. Prog. Aerosp. Sci. 2017, 91, 99–131. [Google Scholar] [CrossRef]
- Hardis Group, EyeSee Official Webpage. Available online: http://www.eyesee-drone.com (accessed on 31 March 2019).
- Geodis and Delta Drone Official Communication. Available online: www.goo.gl/gzeYV7 (accessed on 31 March 2019).
- DroneScan Official Webpage. Available online: www.dronescan.co (accessed on 31 March 2019).
- Beul, M.; Droeschel, D.; Nieuwenhuisen, M.; Quenzel, J.; Houben, S.; Behnke, S. Fast Autonomous Flight in Warehouses for Inventory Applications. IEEE Robot. Autom. Lett. 2018, 3, 3121–3128. [Google Scholar] [CrossRef] [Green Version]
- Fraga-Lamas, P.; Fernández-Caramés, T.M. A Review on Blockchain Technologies for an Advanced and Cyber-Resilient Automotive Industry. IEEE Access 2019, 7, 17578–17598. [Google Scholar] [CrossRef]
- Fu, Y.; Zhu, J. Big Production Enterprise Supply Chain Endogenous Risk Management Based on Blockchain. IEEE Access 2019, 7, 15310–15319. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; Fraga-Lamas, P. A Review on the Use of Blockchain for the Internet of Things. IEEE Access 2018, 6, 32979–33001. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; Fraga-Lamas, P. A Review on the Application of Blockchain for the Next Generation of Cybersecure Industry 4.0 Smart Factories. IEEE Access 2019, 7, 45201–45218. [Google Scholar] [CrossRef]
- Yu, B.; Wright, J.; Nepal, S.; Zhu, L.; Liu, J.; Ranjan, R. IoTChain: Establishing Trust in the Internet of Things Ecosystem Using Blockchain. IEEE Cloud Comput. 2018, 5, 12–23. [Google Scholar] [CrossRef]
- Kapitonov, A.; Lonshakov, S.; Krupenkin, A.; Berman, I. Blockchain-based protocol of autonomous business activity for multi-agent systems consisting of UAVs. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linkoping, Sweden, 3–5 October 2017; pp. 84–89. [Google Scholar]
- Global Trade Item Number Official Web Page at GS1 Website. Available online: https://www.gs1.org/gtin (accessed on 31 March 2019).
- Finkenzeller, K. RFID Handbook: Fundamentals and Applications in Contactless Smart Cards and Identification, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Fraga-Lamas, P.; Noceda-Davila, D.; Fernández-Caramés, T.M.; Díaz-Bouza, M.; Vilar-Montesinos, M. Smart Pipe System for a Shipyard 4.0. Sensors 2016, 16, 2186. [Google Scholar] [CrossRef] [PubMed]
- Ganesan, R.; Krumm, J.; Pankalla, S.; Ludwig, K.; Glesner, M. Design of an organic electronic label on a flexible substrate for temperature sensing. In Proceedings of the ESSCIRC, Bucharest, Romania, 16–20 September 2013. [Google Scholar]
- Todd, B.; Phillips, M.; Schultz, S.M.; Hawkins, A.R.; Jensen, B.D. RFID threshold accelerometer. In Proceedings of the IEEE AUTOTESTCON, Salt Lake City, UT, USA, 8–11 September 2008. [Google Scholar]
- Amin, E.M.; Bhattacharyya, R.; Sarma, S.; Karmakar, N.C. Chipless RFID tag for light sensing. In Proceedings of the IEEE Antennas and Propagation Society International Symposium, Memphis, TN, USA, 6–11 July 2014. [Google Scholar]
- Fernández-Caramés, T.M.; Fraga-Lamas, P. A Review on Human-Centered IoT-Connected Smart Labels for the Industry 4.0. IEEE Access 2018, 6, 25939–25957. [Google Scholar] [CrossRef]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Noceda-Davila, D.; Díaz-Bouza, M.; Vilar-Montesinos, M.; Pena-Agras, J.D.; Castedo, L. Enabling automatic event detection for the pipe workshop of the shipyard 4.0. In Proceedings of the 2017 56th FITCE Congress, Madrid, Spain, 14–16 September 2017; pp. 20–27. [Google Scholar]
- ProVIEW Smart Label Official Web Page. Available online: https://www.omni-id.com/rfid-in-manufacturing/ (accessed on 31 March 2019).
- Coksun, V.; Ok, K.; Ozdenizci, B. Near Field Communications: From Theory to Practice, 1st ed.; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Held, I.; Chen, A. Channel Estimation and Equalization Algorithms for Long Range Bluetooth Signal Reception. In Proceedings of the IEEE Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010. [Google Scholar]
- Fernández-Caramés, T.M.; Rodas, J.; Escudero, C.J.; Iglesia, D.I. Bluetooth Sensor Network Positioning System with Dynamic Calibration. In Proceedings of the International Symposium on Wireless Communications Systems, Trondheim, Norway, 17–19 October 2007. [Google Scholar]
- Rodas, J.; Fernández-Caramés, T.M.; Escudero, C.J.; Iglesia, D.I. Multiple Antennas Bluetooth System for RSSI Stabilization. In Proceedings of the International Symposium on Wireless Communications Systems, Trondheim, Norway, 17–19 October 2007. [Google Scholar]
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Castedo, L. Towards the Internet of Smart Trains: A Review on Industrial IoT-Connected Railways. Sensors 2017, 17, 1457. [Google Scholar] [CrossRef]
- Hernández-Rojas, D.L.; Fernández-Caramés, T.M.; Fraga-Lamas, P.; Escudero, C.J. Design and Practical Evaluation of a Family of Lightweight Protocols for Heterogeneous Sensing through BLE Beacons in IoT Telemetry Applications. Sensors 2017, 18, 57. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; González-López, M.; Castedo, L. FPGA-based vehicular channel emulator for real-time performance evaluation of IEEE 802.11 p transceivers. EURASIP J. Wirel. Commun. Netw. 2010, 2010, 607467. [Google Scholar] [CrossRef]
- Fernández-Caramés, T.M.; González-López, M.; Castedo, L. FPGA-based vehicular channel emulator for evaluation of IEEE 802.11p transceivers. In Proceedings of the International Conference on Intelligent Transport Systems Telecommunications, Lille, France, 20–22 October 2009. [Google Scholar]
- ZigBee Alliance. Available online: http://www.zigbee.org (accessed on 31 March 2019).
- Khutsoane, O.; Isong, B.; Abu-Mahfouz, A.M. IoT devices and applications based on LoRa/LoRaWAN. In Proceedings of the Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017. [Google Scholar]
- Weyn, M.; Ergeerts, G.; Berkvens, R.; Wojciechowski, B.; Tabakov, Y. DASH7 alliance protocol 1.0: Low-power, mid-range sensor and actuator communication. In Proceedings of the IEEE Conference on Standards for Communications and Networking (CSCN), Tokyo, Japan, 28–30 October 2015. [Google Scholar]
- Kim, A.N.; Hekland, F.; Petersen, S.; Doyle, P. When HART goes wireless: Understanding and implementing the WirelessHART standard. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation, Hamburg, Germany, 15–18 September 2008. [Google Scholar]
- SigFox Official Web Page. Available online: https://www.sigfox.com (accessed on 31 March 2019).
- ANT Wireless Official Web Page. Available online: https://www.thisisant.com (accessed on 31 March 2019).
- Lu, J.; Xu, X.; Li, X.; Li, L.; Chang, C.-C.; Feng, X.; Zhang, S. Detection of Bird’s Nest in High Power Lines in the Vicinity of Remote Campus Based on Combination Features and Cascade Classifier. IEEE Access 2018, 6, 39063–39071. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, C.; Xu, C.; Xiong, F.; Zhang, Y.; Umer, T. Energy-Efficient Industrial Internet of UAVs for Power Line Inspection in Smart Grid. IEEE Trans. Ind. Inform. 2018, 14, 2705–2714. [Google Scholar] [CrossRef] [Green Version]
- Lim, G.J.; Kim, S.; Cho, J.; Gong, Y.; Khodaei, A. Multi-UAV Pre-Positioning and Routing for Power Network Damage Assessment. IEEE Trans. Smart Grid 2018, 9, 3643–3651. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Z. Automatic Detection of Wind Turbine Blade Surface Cracks Based on UAV-Taken Images. IEEE Trans. Ind. Electron. 2017, 64, 7293–7303. [Google Scholar] [CrossRef]
- Peng, K.; Liu, W.; Sun, Q.; Ma, X.; Hu, M.; Wang, D.; Liu, J. Wide-Area Vehicle-Drone Cooperative Sensing: Opportunities and Approaches. IEEE Access 2018, 7, 1818–1828. [Google Scholar] [CrossRef]
- Rossi, M.; Brunelli, D. Autonomous Gas Detection and Mapping with Unmanned Aerial Vehicles. IEEE Trans. Instrum. Meas. 2016, 65, 765–775. [Google Scholar] [CrossRef]
- Scilimati, V.; Petitti, A.; Boccadoro, P.; Colella, R.; Di Paola, D.; Milella, A.; Grieco, L.A. Industrial Internet of things at work: A case study analysis in robotic-aided environmental monitoring. IET Wirel. Sens. Syst. 2017, 7, 155–162. [Google Scholar] [CrossRef]
- Misra, P.; Kumar, A.A.; Mohapatra, P.; Balamuralidhar, P. Aerial Drones with Location-Sensitive Ears. IEEE Commun. Mag. 2018, 56, 154–160. [Google Scholar] [CrossRef]
- Li, H.; Savkin, A.V. Wireless Sensor Network Based Navigation of Micro Flying Robots in the Industrial Internet of Things. IEEE Trans. Ind. Inform. 2018, 14, 3524–3533. [Google Scholar] [CrossRef]
- Olivares, V.; Córdova, F. Evaluation by computer simulation of the operation of a fleet of drones for transporting materials in a manufacturing plant of plastic products. In Proceedings of the 2015 CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Santiago, Chile, 28–30 October 2015; pp. 847–853. [Google Scholar]
- Zhao, S.; Hu, Z.; Yin, M.; Ang, K.Z.Y.; Liu, P.; Wang, F.; Dong, X.; Lin, F.; Chen, B.M.; Lee, T.H. A Robust Real-Time Vision System for Autonomous Cargo Transfer by an Unmanned Helicopter. IEEE Trans. Ind. Electron. 2015, 62, 1210–1219. [Google Scholar] [CrossRef]
- Kuru, K.; Ansell, D.; Khan, W.; Yetgin, H. Analysis and Optimization of Unmanned Aerial Vehicle Swarms in Logistics: An Intelligent Delivery Platform. IEEE Access 2019, 7, 15804–15831. [Google Scholar] [CrossRef]
- Cho, H.; Kim, D.; Park, J.; Roh, K.; Hwang, W. 2D Barcode Detection using Images for Drone-assisted Inventory Management. In Proceedings of the 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018. [Google Scholar]
- Macoir, N.; Bauwens, J.; Jooris, B.; Van Herbruggen, B.; Rossey, J.; Hoebeke, J.; De Poorter, E. UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management. Sensors 2019, 19, 467. [Google Scholar] [CrossRef] [PubMed]
- Bae, S.M.; Han, K.H.; Cha, C.N.; Lee, H.Y. Development of Inventory Checking System Based on UAV and RFID in Open Storage Yard. In Proceedings of the International Conference on Information Science and Security (ICISS), Pattaya, Thailand, 19–22 December 2016. [Google Scholar]
- Ong, J.H.; Sanchez, A.; Williams, J. Multi-UAV System for Inventory Automation. In Proceedings of the 1st Annual RFID Eurasia, Istanbul, Turkey, 5–6 September 2007. [Google Scholar]
- Harik, E.H.C.; Guérin, F.; Guinand, F.; Brethé, J.; Pelvillain, H. Towards An Autonomous Warehouse Inventory Scheme. In Proceedings of the IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016. [Google Scholar]
- Tiwari, S.; Wee, H.M.; Daryanto, Y. Big data analytics in supply chain management between 2010 and 2016: Insights to industries. Comput. Ind. Eng. 2018, 115, 319–330. [Google Scholar] [CrossRef]
- Rossmann, B.; Canzaniello, A.; von der Gracht, H.; Hartmann, E. The future and social impact of Big Data Analytics in Supply Chain Management: Results from a Delphi study. Technol. Forecast. Soc. Chang. 2018, 130, 135–149. [Google Scholar] [CrossRef]
- Zhong, R.Y.; Newman, S.T.; Huang, G.Q.; Lan, S. Big Data for supply chain management in the service and manufacturing sectors: Challenges, opportunities, and future perspectives. Comput. Ind. Eng. 2016, 101, 572–591. [Google Scholar] [CrossRef]
- Zhong, R.Y.; Xu, C.; Chen, C.; Huang, G.Q. Big Data Analytics for Physical Internet-based intelligent manufacturing shop floors. Int. J. Prod. Res. 2017, 55, 2610–2621. [Google Scholar] [CrossRef]
- Christidis, K.; Devetsikiotis, M. Blockchains and smart contracts for the Internet of Things. IEEE Access 2016, 4, 2292–2303. [Google Scholar] [CrossRef]
- Koomey, J.; Brill, K.; Turner, P.; Stanley, J.; Taylor, B. A Simple Model for Determining True Total Cost of Ownership for Data Centers; White Paper; Uptime Institute: Seattle, WA, USA, 2007. [Google Scholar]
- Middleton, S.G.; Marden, M. Deploying an Effective Server Life-Cycle Strategy Will Minimize Costs: Leasing Is a Valuable; White Paper; IDC: Framingham, MA, USA, 2015. [Google Scholar]
- Cai, W.; Wang, Z.; Ernst, J.B.; Hong, Z.; Feng, C.; Leung, V.C.M. Decentralized Applications: The Blockchain- Empowered Software System. IEEE Access 2018, 6, 53019–53033. [Google Scholar] [CrossRef]
- Fraga-Lamas, P. Enabling Technologies and Cyber-Physical Systems for Mission-Critical Scenarios. May 2017. Available online: http://hdl.handle.net/2183/19143 (accessed on 31 March 2019).
- Ardupilot Official Web Page. Available online: http://ardupilot.org/ardupilot/ (accessed on 31 March 2019).
- RF-Code Official Web Page. Available online: https://www.rfcode.com/ (accessed on 31 March 2019).
- OrbitDB: Peer-To-Peer Database for the Decentralized Web. Github Repository. Available online: https://github.com/orbitdb/orbit-db (accessed on 31 March 2019).
- IPFS Official Webpage. Available online: https://ipfs.io/ (accessed on 31 March 2019).
- Ethereum Official Webpage. Available online: https://www.ethereum.org/ (accessed on 31 March 2019).
- Rinkeby’s Official Website. Available online: https://www.rinkeby.io/ (accessed on 30 April 2019).
- Ropsten’s Official GitHub Page. Available online: https://github.com/ethereum/ropsten (accessed on 30 April 2019).
- Rinkeby’s Ether Faucet. Available online: https://faucet.rinkeby.io/ (accessed on 30 April 2019).
- Metamask Ether Faucet. Available online: https://faucet.metamask.io/ (accessed on 30 April 2019).
- Truffle Official Website. Available online: https://truffleframework.com (accessed on 30 April 2019).
- Infura’s Official Website. Available online: https://infura.io/dashboard (accessed on 30 April 2019).
- Node.js Official Web Site. Available online: https://nodejs.org/en/ (accessed on 30 April 2019).
- Web3 Official GitHub Page. Available online: https://github.com/ethereum/web3.js/ (accessed on 30 April 2019).
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Noceda-Davila, D.; Vilar-Montesinos, M. RSS Stabilization Techniques for a Real-Time Passive UHF RFID Pipe Monitoring System for Smart Shipyards. In Proceedings of the 2017 IEEE International Conference on RFID (IEEE RFID 2017), Phoenix, AR, USA, 9–11 May 2017. [Google Scholar]
- Kotz, S.; Nadarajah, S. Extreme Value Distributions: Theory and Applications; Imperial College Press: London, UK, 2000. [Google Scholar]
- Kernel Distribution. Matlab Official Webpage. Available online: https://es.mathworks.com/help/stats/kernel-distribution.html (accessed on 30 April 2019).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Frequency Band | Max. Range in Optimal Conditions | Data Rate | Power type | Main Features | Main Limitations for Inventory Applications | Popular Applications |
|---|---|---|---|---|---|---|---|
| ANT+ | 2.4 GHz | 30 m | 20 kbit/s | Ultra-low power | Up to 65,533 nodes | Lack of commercial inventory tags | Health, sport monitoring |
| Barcode/QR | − | <4 m | − | No power | Very low cost, visual decoding | Need for LOS | Asset tracking and marketing |
| Bluetooth 5 LE | 2.4 GHz | <400 m | 1360 kbit/s | Low power | Batteries only last days to weeks | Batteries need to be recharged, shared communications radio frequency | Beacons, wireless headsets |
| DASH7/ISO 18000-7 | 315–915 MHz | <10 km | 27.8 kbit/s | Very low power, alkaline batteries last months to years | Long reading distance, multi-year battery | Batteries need to be recharged, shared communications radio frequency | Smart industry and military |
| HF RFID | 3–30 MHz (13.56 MHz) | a few meters | <640 kbit/s | No power | NLOS, no need for batteries | Relatively short reading range | Smart Industry, payments, asset tracking |
| Infrared (IrDA) | 300 GHz to 430 THz | a few meters | 2.4 kbit/s–1 Gbit/s | Low power | Low-cost hardware, security, high speed | Need for LOS, batteries may drain fast when transmitting continuously | Remote control, data transfer |
| IQRF | 433 MHz, 868 MHz or 916 MHz | hundreds of meters | 19.2 kbit/s | Low power | Long communications range | Shared communications radio frequency | Internet of Things and M2M applications |
| LF RFID | 30–300 KHz (125 KHz) | <10 cm | <640 kbit/s | No power | NLOS, low cost | Very short reading distance (in general, a few centimeters) | Smart Industry and security access |
| NB-IoT | LTE in-band, guard-band | <35 km | <250 kbit/s | Low power | Long reading range | Dependent on third-party infrastructure | IoT applications |
| NFC | 13.56 MHz | <20 cm | 424 kbit/s | No power | Low cost | Short reading distance | Ticketing and payments |
| RuBee | 131 KHz | 20 m | 8 kbit/s | Very low power | Magnetic propagation, multi-year battery life | Only one known manufacturer | Applications with harsh electromagnetic propagation |
| LoRa/LoRaWAN | 2.4 GHz | kilometers | 0.25–50 kbit/s | Low power | Long range, long battery life | Very few commercial inventory tags, more expensive than other alternatives | Smart cities, M2M applications |
| SigFox | 868–902 MHz | 50 km | 100 kbit/s | Low power | Long range, global cellular network | Dependent on third-party infrastructure | Internet of Things and M2M applications |
| UHF RFID | 30 MHz–3 GHz | tens of meters | <640 kbit/s | Very low power or no power | NLOS, wide range of suppliers, low cost | Propagation problems with metal and liquids (specially with high transmission frequencies) | Smart Industry, asset tracking and toll payment |
| Ultrasounds | >20 kHz (2–10 MHz) | <10 m | 250 kbit/s | Low power | Based on sound wave propagation | Relatively short reading range | Asset positioning and location |
| UWB/IEEE 802.15.3a | 3.1 to 10.6 GHz | < 10 m | >110 Mbit/s | Low power (batteries last hours to days) | Accurate positioning (centimeter accuracy) | Expensive hardware, propagation problems in metallic environments | Real Time Location Systems (RTLS), short-distance streaming |
| Wi-Fi (IEEE 802.11b/g/n/ac) | 2.4–5 GHz | <150 m | up to 433 Mbit/s (one stream) | High power (batteries may last hours) | High speed, ubiquity | Short battery life | Internet access, broadband |
| Wi-Fi HaLow/IEEE 802.11ah | 868-915 MHz | <1 km | >100 Kbit/s per channel | Low power | Long communications range | Not compatible with previous Wi-Fi standards, shared communications radio frequency | IoT applications |
| WirelessHART | 2.4 GHz | <10 m | 250 kbit/s | Low power (Batteries last several years) | Compatibility with HART protocol, standardized as IEC 62591 | Shared communications radio frequency, lack of commercial inventory tags | Wireless sensor network applications |
| ZigBee | 868–915 MHz, 2.4 GHz | <100 m | 20–250 kbit/s | Very low power (batteries last months to years) | Easy to scale, up to 65,536 nodes | Relatively expensive hardware, potential interference from devices in the same frequency band | Smart Home and industrial applications |
| Reference | Type of Solution | Labelling and Identification Technology | UAV Characteristics | Designed Architecture and Communications | Main Inventory Function | Experiments and Key Performance Indicators (KPIs) | Advanced Supply Management Data Techniques | Blockchain or Any Other DLT |
|---|---|---|---|---|---|---|---|---|
| [14] | Commercial solution by Hardis Group | Barcodes | Autonomous quadcopter with a high-performance scanning system and an HD camera. Battery life around 20 min (50 min to charge it). | It incorporates indoor localization technology. Automatic flight area and plan, 360 anti-collision system. | Automate inventory-taking and inventory control in warehouses | No available KPI | Automatic acquisition of photo data. Cloud applications to manage mapping, data processing, reporting, and the fleet of drones. Compatible with all WMS and ERPS and managed by a tablet app. | No DLT |
| [15] | Commercial solution, Geodis and delta drone | Barcodes | Autonomous quadcopter equipped with four HD cameras | Indoor geolocation technology, it operates autonomously during the hours the site is closed. | Plug and play solution, this solution also adapts to all types of Warehouse Management Systems (WMS) | Reading rates close to 100%. | Enables the counting and reporting of data in real time, the processing of data, and its restitution in the warehouse’s information system. | No DLT |
| [16] | Commercial solution, Dron Scan | Barcodes | UAV equipped with a camera and a mounted display | DroneScan base station communicates via a dedicated RF frequency (not WiFi or Bluetooth) and has a range of over 100 m. | A Windows touch screen tablet allows the operator to receive live feedback both on screen and from audible cues as the drone scans and records data | 50 times faster than manual capturing | All aspects of the imported data are customizable by modifying scripts, the customisation changes the way the system works and how the scanned data are processed. DroneScan software uploads scanned data and drone position information to the cloud (Azure IoT), to the customer systems (web services, RFC’s API’s or BAPI’s) and exports the data to Excel. The imported data are used to re-build a virtual map of the warehouse so that the location of the drone can be determined. | No DLT |
| [17] | Academic solution | RFID, multimodal tag detection. | Autonomous Micro Aerial Vehicles (MAVs), RFID reader and two high-resolution cameras | Fast fully autonomous navigation and control, including avoidance of static and dynamic obstacles in indoor and outdoor environments. | Robust self-localization solely based on an onboard LIDAR at high velocities (up to 7.8 m/s) | - | - | No DLT |
| [19] | Academic solution | - | - | - | Endogenous risk management mechanism to improve supply chain’s operation efficiency | Theoretical pharmaceutical factory supply chain topology structure based on blockchain. | Confront supply chain endogenous risk avoiding the credit risk caused by the information asymmetry among the enterprises inside the supply chain, and the risk caused by incomplete information acquisition inside the supply chain. | Blockchain and smart contracts |
| [23] | Academic solution | - | - | - | Autonomous economic system with UAV. | Although field trials were conducted with drones, no KPIs are available. | Architectural solution for organizing a business activity protocol for multi-agent systems. | Communication system between agents (DAOs) in a P2P network using Ethereum and smart contracts. |
| [59] | Academic solution | QR | IR-based camera, no additional description | Computer vision techniques (region candidate detection, feature extraction, and SVM classification) for barcode detection and recognition in factory warehouses. | Drone-assisted inventory management with an efficient detection framework to determine the localizations of 2D barcodes to improve path planning and reduce power consumption | Experiment performance results of 2D barcode images. The proposed method demonstrates a precision of 98.08% and a recall of 98.27% within a fused feature ROC curve. | - | No DLT |
| [60] | Academic solution, open-source code of the UWB hardware and MAC protocol software. | QR | - | Plug-and-play capabilities and minimal pre-existing infrastructure by combining two wireless technologies: sub-GHz for IoT-standardized long-range wireless communication backbone and UWB for localization. | A MAC protocol for an UWB localization system using battery-powered or energy harvesting operated anchors. | Experimental validation for two real-life scenarios: autonomous drone navigation in a warehouse mock-up and tracking of runners in sport halls.Theoretical evaluation of the design choices on overall system performance in terms of update rate, energy consumption, maximum communication range, localization accuracy and scalability. | - | No DLT |
| [61] | Academic solution | RFID | Phantom 2 vision DJI (weight 1242 g, maximum speed 15 m/s and up to 700 m) | Drone with a Windows CE 5.0 portable PDA (AT-880) that acts as a UHF RFID reader moves around an open storage yard. | Inventory checking in an open stock yard | Prototype. No performance experiments. | A data collection program detects and saves the information of passive tags obtained by a portable PDA. After the flight, the gathered tag data is transferred to the inventory checking server and is compared with the inventory data stored in database and classified in to four inventory states: normality, location error, missing, unregistered. | No DLT |
| [62] | Academic solution | RFID (EPC) | Draganfly commercial radio-controlled helicopters 82×82 cm, average flight time of 12 min | RFID readers attached to the simulated UAVs are assumed to have a 100% read-guarantee when EPC tags are within the reading range of the RFID reader. | Read the EPCs in the warehouse within the 12-min duration | Preliminary simulation results, three-dimensional graphical simulator framework has been designed using Microsoft XNA framework to represent a real warehouse | Coordinated distribution of the UAVs. Although six independent UAVs were deployed, they collectively failed to complete the task of finding all EPCs | No DLT |
| [63] | Academic solution | Barcodes, AR markers | UAVs and UGVs with LIDARs | UAV and UGV work cooperatively using vision techniques. The UGV acts as a carrying platform and as an AR ground reference for the indoor flight of the UAV. While the UAV is used as the mobile scanner. | Novel indoor warehouse inventory scheme to improve automation as well as the diminution of time consumption and injuries risks. | Experimental setup is to validate the visual guidance of the UAV taking the UGV as a ground. UAV need to be equipped with sensors to avoid collision with the racks during the scanning process. | - | No DLT |
| [67] | Academic solution | RFID | - | - | Physical Internet-based intelligent manufacturing shop floors | Experiments on logistics rules for optimizing the delivery time | Big data analytics framework that processes the information collected from an RFID-enabled shop floor | No DLT |
| Proposed system | Academic solution | RFID | Indoor/outdoor hexacopter designed from scratch as a trade-off between cost, modularity, payload capacity and robustness. | Modular and scalable UAV-architecture using WiFi infrastructure and ability to run decentralized applications. | Enable inventory and traceability applications focused on a holistic view at inventory levels across the supply chain and with external stakeholders | Prototype and performance experiments: inventory time in the warehouse under different circumstances, signal strength monitoring and performance of the implemented architecture (decentralized database and blockchain response latency) | Data distribution and enhanced cyber security (information integrity, tamper-proof data, ensured reliability and availability), efficient data storage and data versioning. | Decentralized database (OrbitDB) over InterPlanetary File System (IPFS) in a P2P network using Ethereum and smart contracts to automate certain processes. |
| Components | Relevant Features |
|---|---|
| Flight controllers | Pixhawk 2.4.8 |
| STM32F427 microcontroller | |
| STM32F103 coprocessor | |
| Sensors | L3GD20 3-axis digital gyroscope |
| LSM303D 3-axis accelerometer and magnetometer | |
| MPU6000 6-axis accelerometer and magnetometer | |
| MS5607 barometer | |
| GPS M8N | |
| RFID reading system | NPR Active Track-2 |
| OrangePI PC Plus (SBC) | |
| Additional components | Frame with six arms (550 mm of wingspan) |
| Brushless motors 920 Kv | |
| ESCs Simonk 30 A | |
| Propellers: 10 inch-diameter and 45 inch-pitch | |
| Battery: 5 Ah (capacity) and 45 c-rate (discharge rate) |
| # Read Tags | % Read Tags | Timestamp (HH:MM:SS,ms) | New Read Tag ID |
|---|---|---|---|
| 0 | 0 | 18:14:43,087 (Take-off time) | |
| 1 | 7.692307692 | 18:14:46,058 | LOCATE00380349 |
| 2 | 15.38461538 | 18:14:46,090 | RFCBDG00011185 |
| 3 | 23.07692308 | 18:14:48,558 | LOCATE00380364 |
| 4 | 30.76923077 | 18:14:48,589 | RFCBDG00011185 |
| 5 | 38.46153846 | 18:14:52,748 | LOCATE00380372 |
| 6 | 46.15384615 | 18:14:54,349 | LOCATE00380349 |
| 7 | 53.84615385 | 18:14:57,129 | RFCBDG00011188 |
| 8 | 61.53846154 | 18:15:11,403 | LOCATE00380330 |
| 9 | 69.23076923 | 18:15:33,008 | LOCATE00365573 |
| 10 | 76.92307692 | 18:15:49,288 | LOCATE00375358 |
| 11 | 84.61538462 | 18:15:56,454 | LOCATE00380359 |
| 12 | 92.30769231 | 18:15:56,456 | LOCATE00380357 |
| 13 | 100 | 18:16:01,630 | LOCATE00375356 |
| # Tag IDs/Network | Intranet | Internet |
|---|---|---|
| 13 | Scenario A: : 0.1576 s; : 0.0039 s | Scenario D: : 0.3648 s; : 0.0114 s |
| 5000 | Scenario B: : 0.1669 s; : 0.0032 s | Scenario E: : 0.5063 s; : 0.0265 s |
| 10,000 | Scenario C: : 0.1892 s; :0.0049 s | Scenario F: : 0.5553 s; : 0.0093 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández-Caramés, T.M.; Blanco-Novoa, O.; Froiz-Míguez, I.; Fraga-Lamas, P. Towards an Autonomous Industry 4.0 Warehouse: A UAV and Blockchain-Based System for Inventory and Traceability Applications in Big Data-Driven Supply Chain Management. Sensors 2019, 19, 2394. https://0-doi-org.brum.beds.ac.uk/10.3390/s19102394
Fernández-Caramés TM, Blanco-Novoa O, Froiz-Míguez I, Fraga-Lamas P. Towards an Autonomous Industry 4.0 Warehouse: A UAV and Blockchain-Based System for Inventory and Traceability Applications in Big Data-Driven Supply Chain Management. Sensors. 2019; 19(10):2394. https://0-doi-org.brum.beds.ac.uk/10.3390/s19102394
Chicago/Turabian StyleFernández-Caramés, Tiago M., Oscar Blanco-Novoa, Iván Froiz-Míguez, and Paula Fraga-Lamas. 2019. "Towards an Autonomous Industry 4.0 Warehouse: A UAV and Blockchain-Based System for Inventory and Traceability Applications in Big Data-Driven Supply Chain Management" Sensors 19, no. 10: 2394. https://0-doi-org.brum.beds.ac.uk/10.3390/s19102394