Validation of Glacier Topographic Acquisitions from an Airborne Single-Pass Interferometer

 , ,
, ,  ,
,
Abstract
:1. Introduction
2. Results
2.1. The GLISTIN-A Interferometer
- Random errors due to thermal noise, ambiguities and multiplicative noise ratios (this is the precision quoted in Table 1 and will improve with spatial averaging).
- Geophysical contributions from differential electromagnetic wave penetration into snow cover, volume decorrelation and snowfall and compaction. Note that for an interferometer this contribution is the resulting shift in the mean interferometric phase center.
- Systematic errors due to limitations in the knowledge of the platform attitude, baseline and antenna thermal deformations.
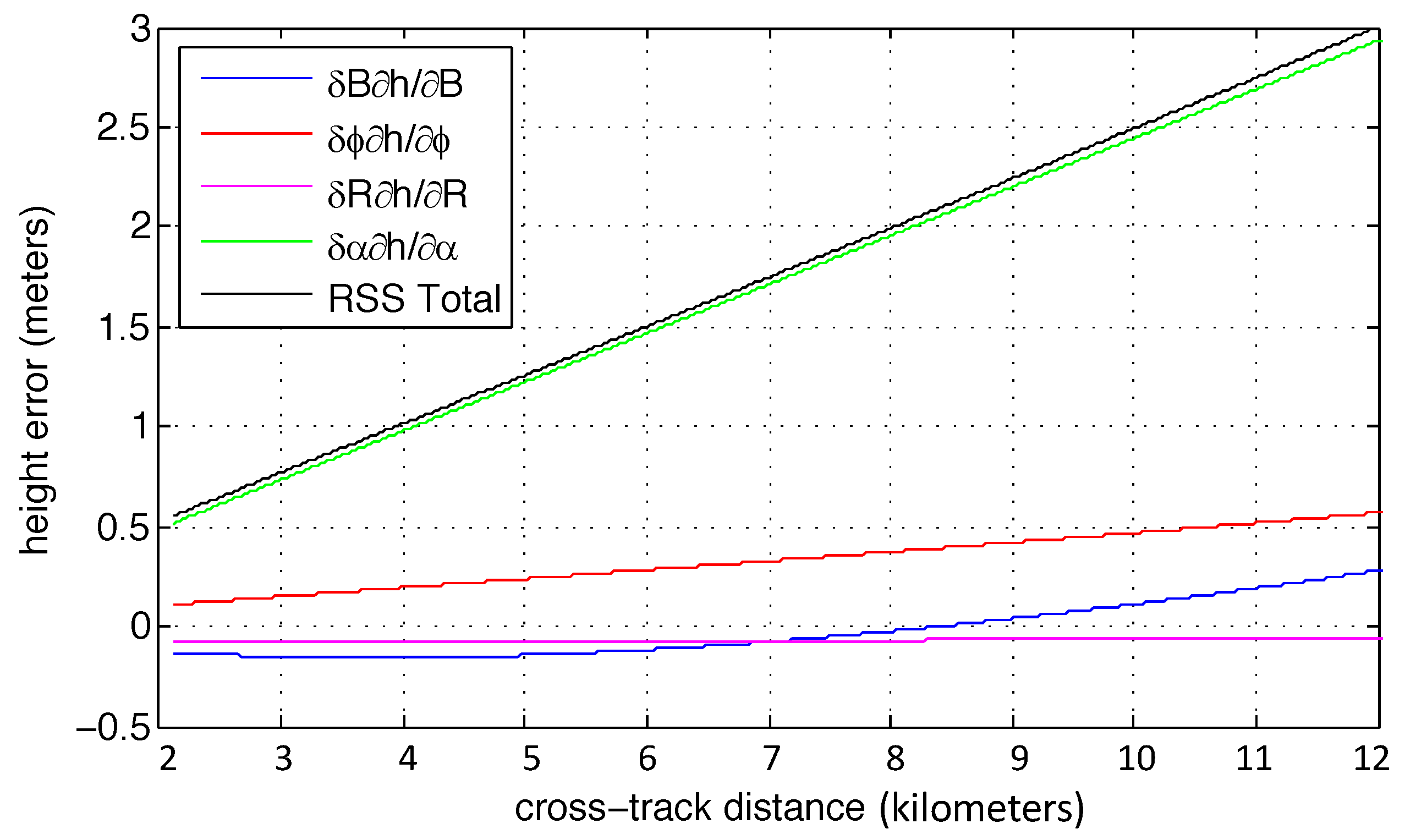
2.2. Systematic Error Contributions
- The relative phase drift of the receivers,
- Aircraft attitude knowledge, and position uncertainty,
- Errors in the transition of the radar timing measurement to the geometric range, ;
- Interferometric baseline change due to thermal distortions, ;
- Isolation between the receivers.
- The baseline length error after calibration is assumed to be 1/3 the a priori surveyed value (0.1 mm);
- Thermal variations in the baseline are bounded by design ( μm over a temperature range of °C to °C as detailed in [8]);
- The peak variation in the baseline orientation, , as limited by Embedded GPS INU (EGI) measurement accuracy flown for these campaigns was assessed to be ~14 mdeg (peak to peak);
- The platform position error is based on the post-processed GPS accuracy of 5 cm; and
- Drift in the differential phase is monitored via an internal calibration loop which is coupled through the entire transmit/receive chain with the exception of the front-end switches and antennas. We have allocated 1 degree to the unknown drift.
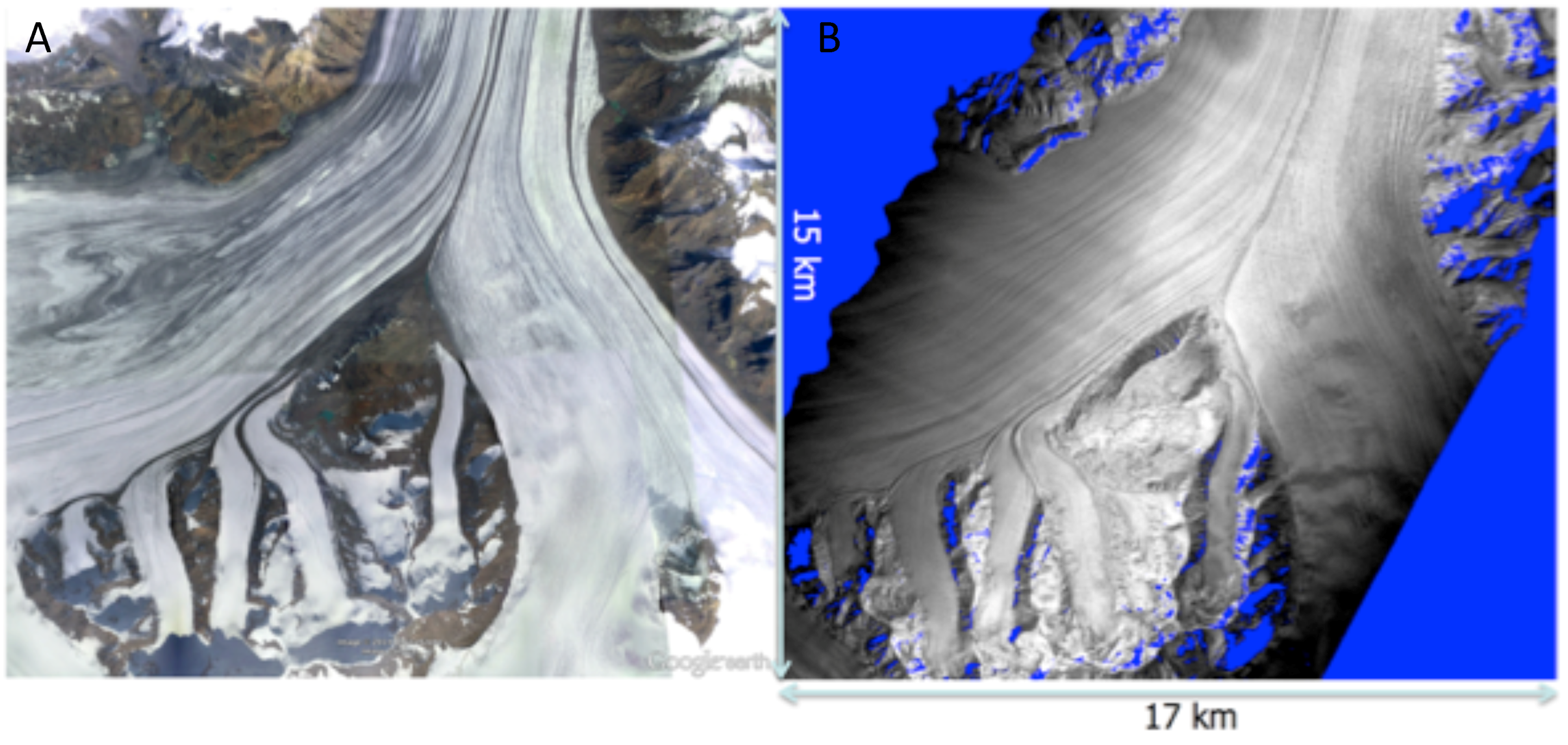
2.3. Alaska Glacier Acquisitions
2.3.1. Campaign Summary
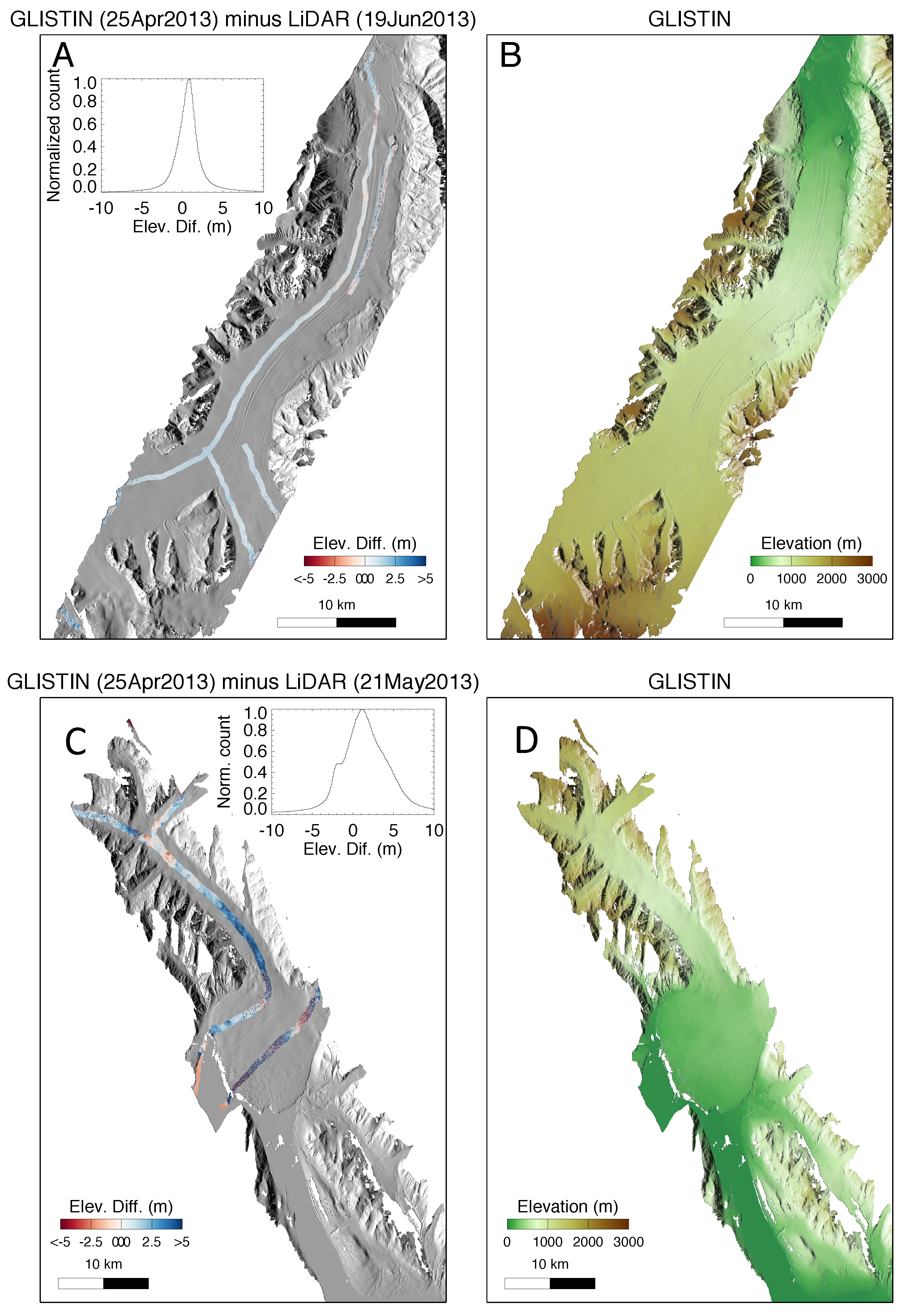
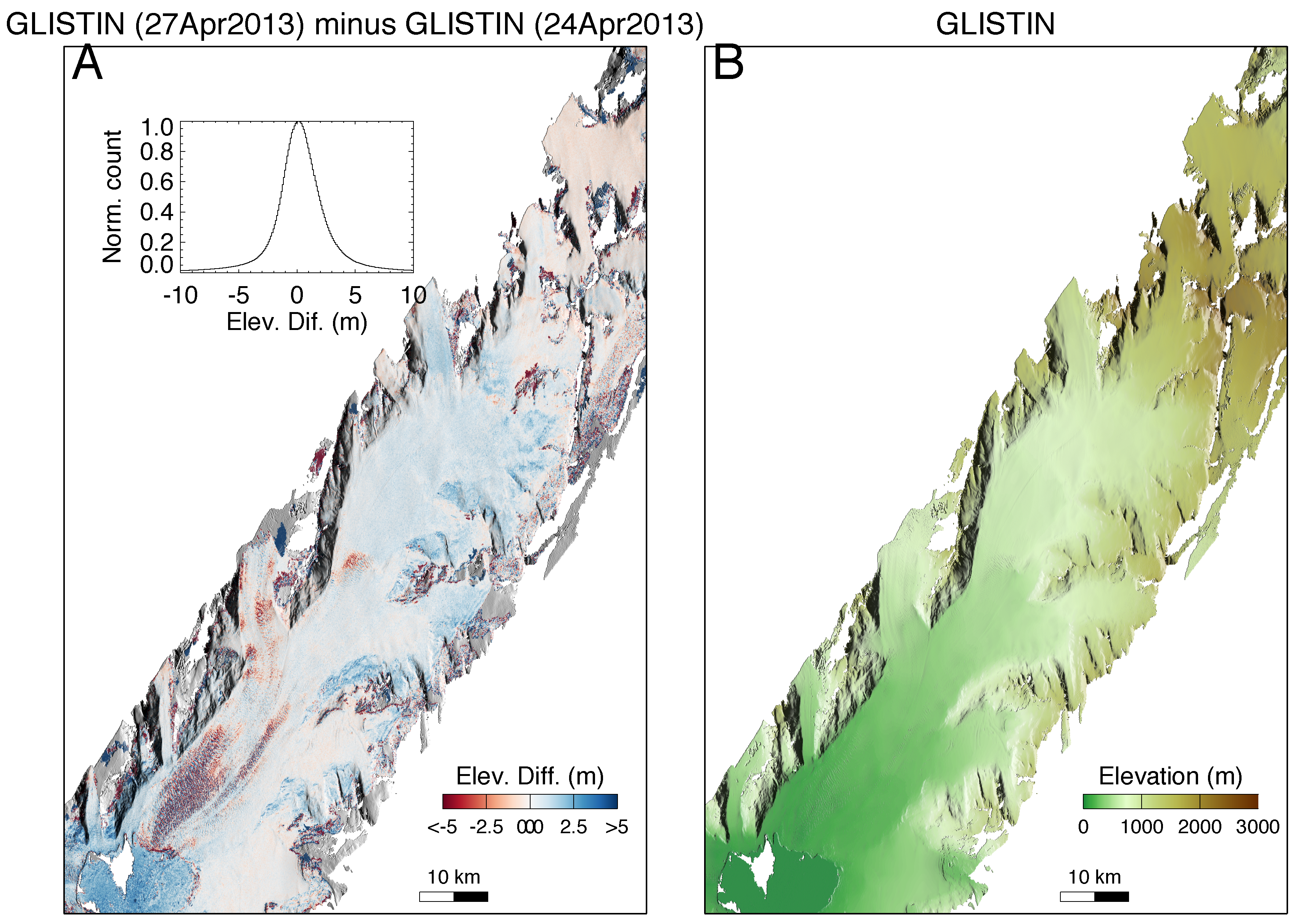
2.3.2. Validation
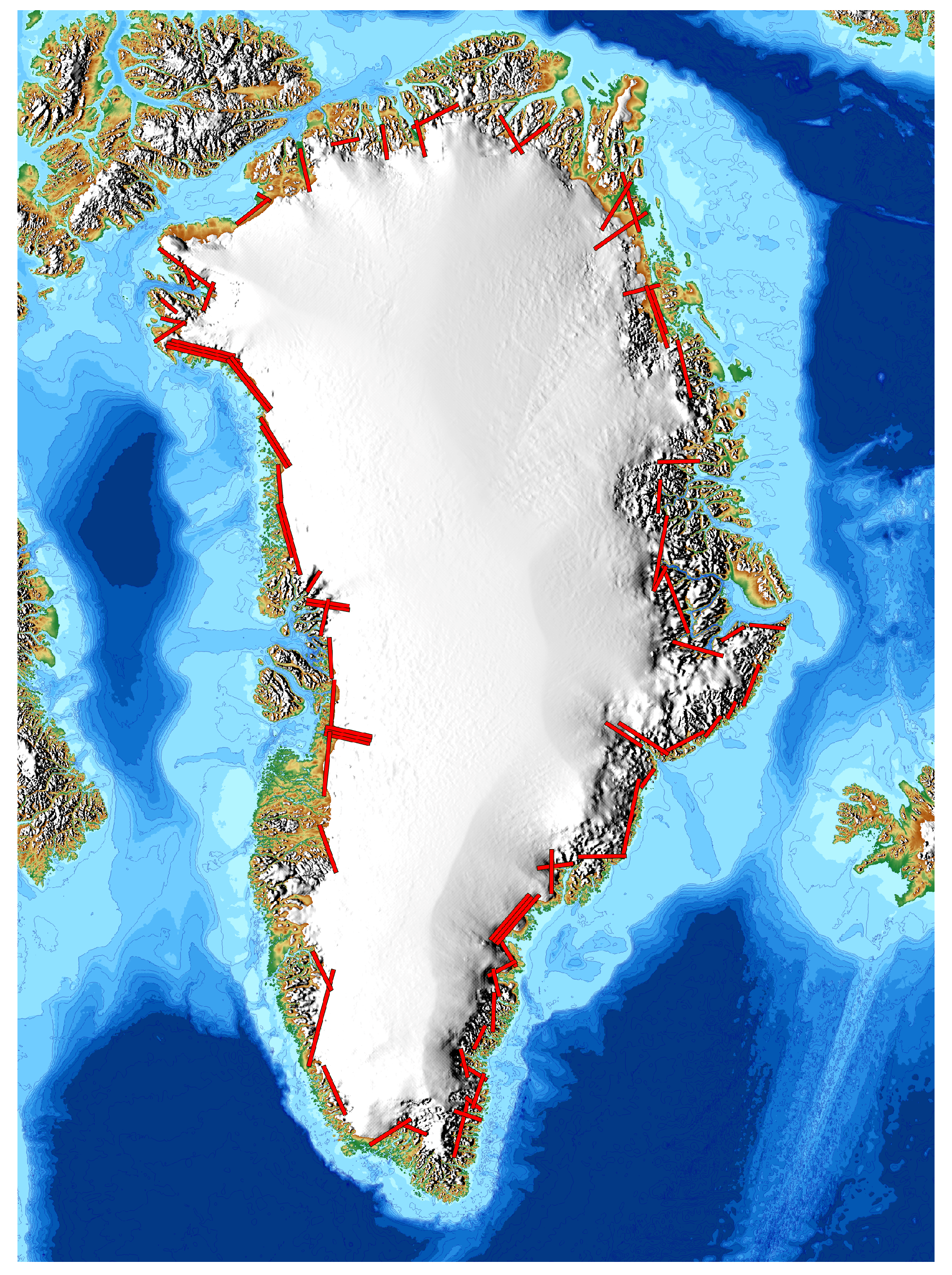
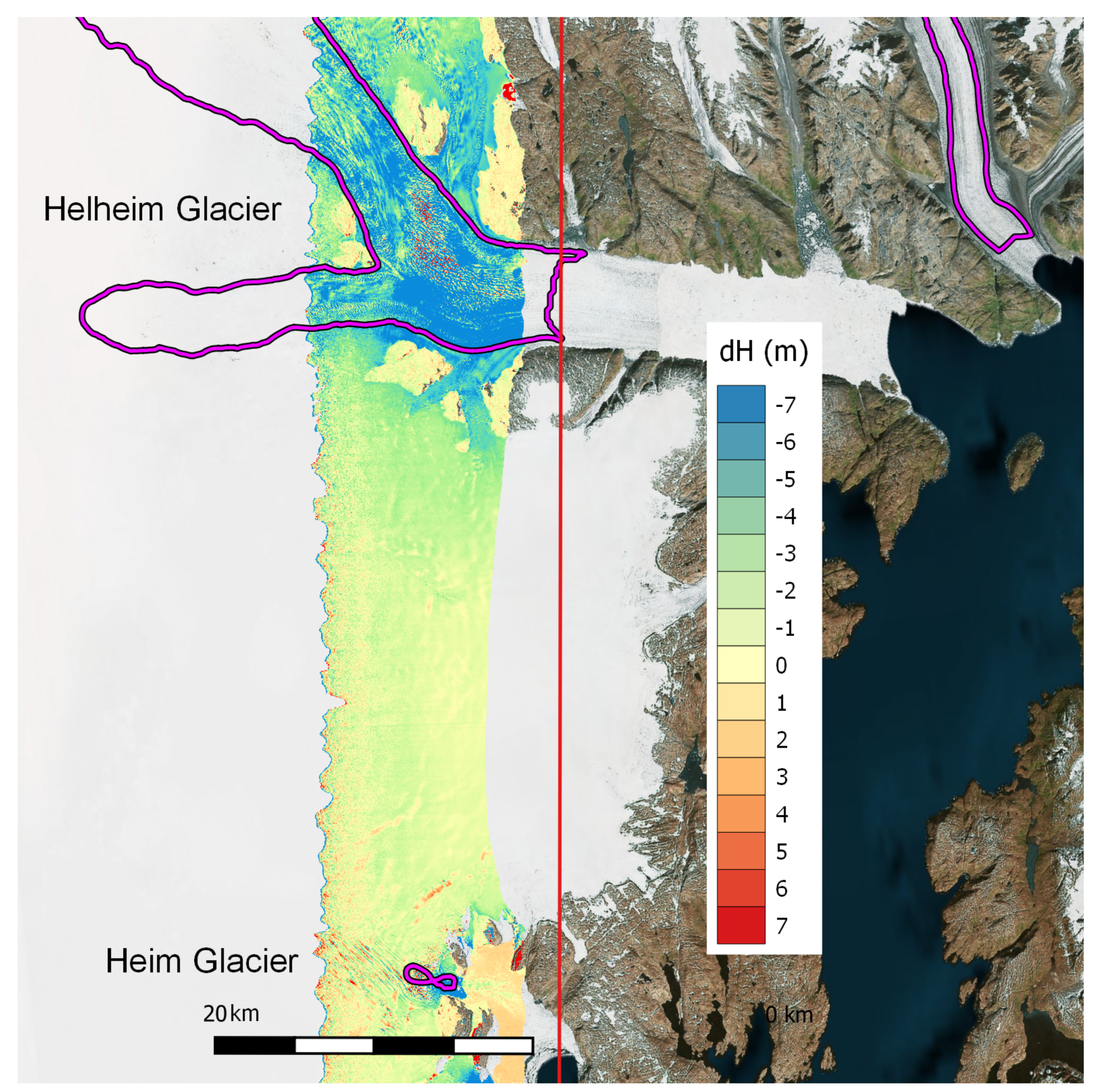
2.4. Large Scale Glacier Mapping: Oceans Melting Greenland
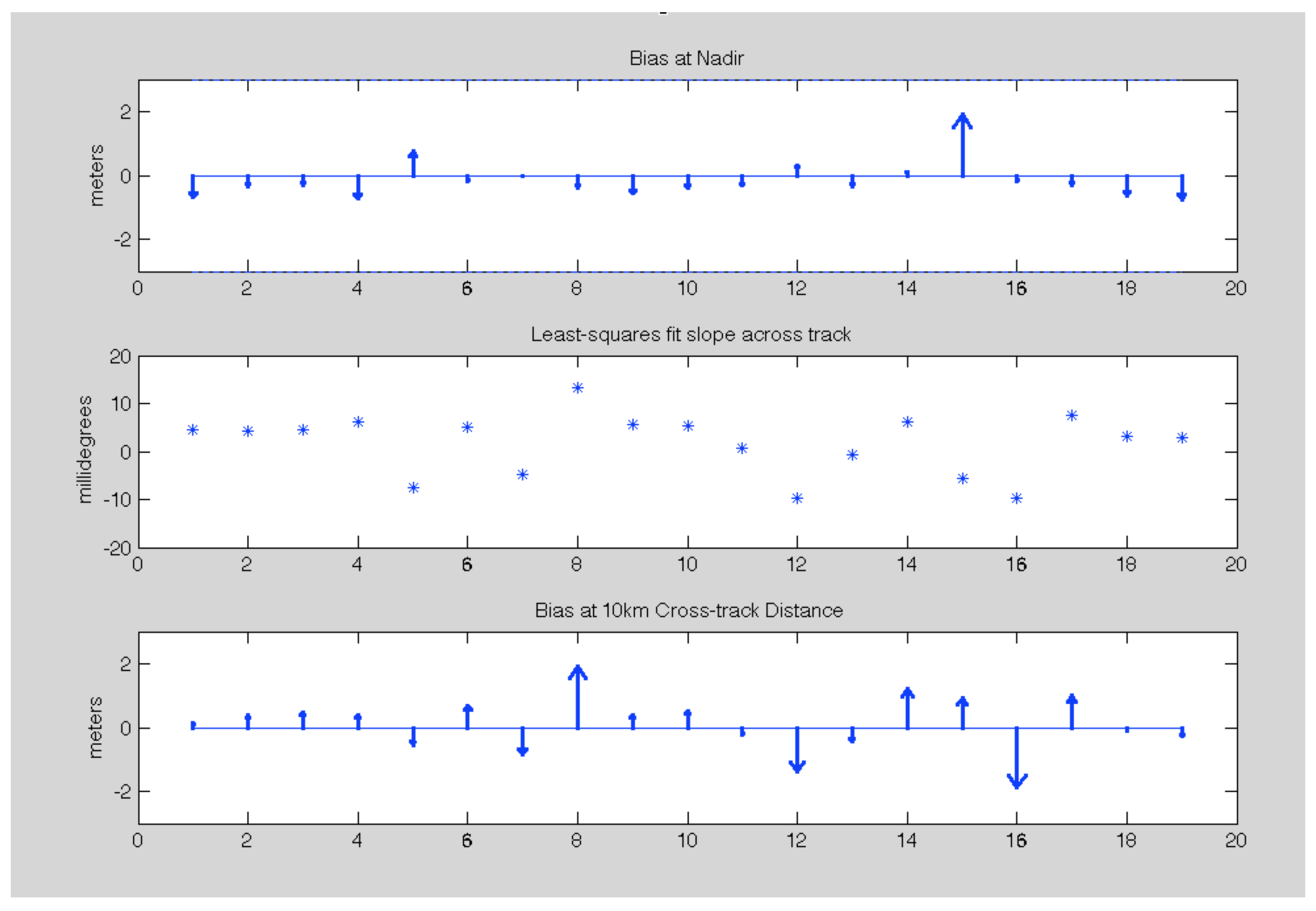
2.4.1. Validation Results
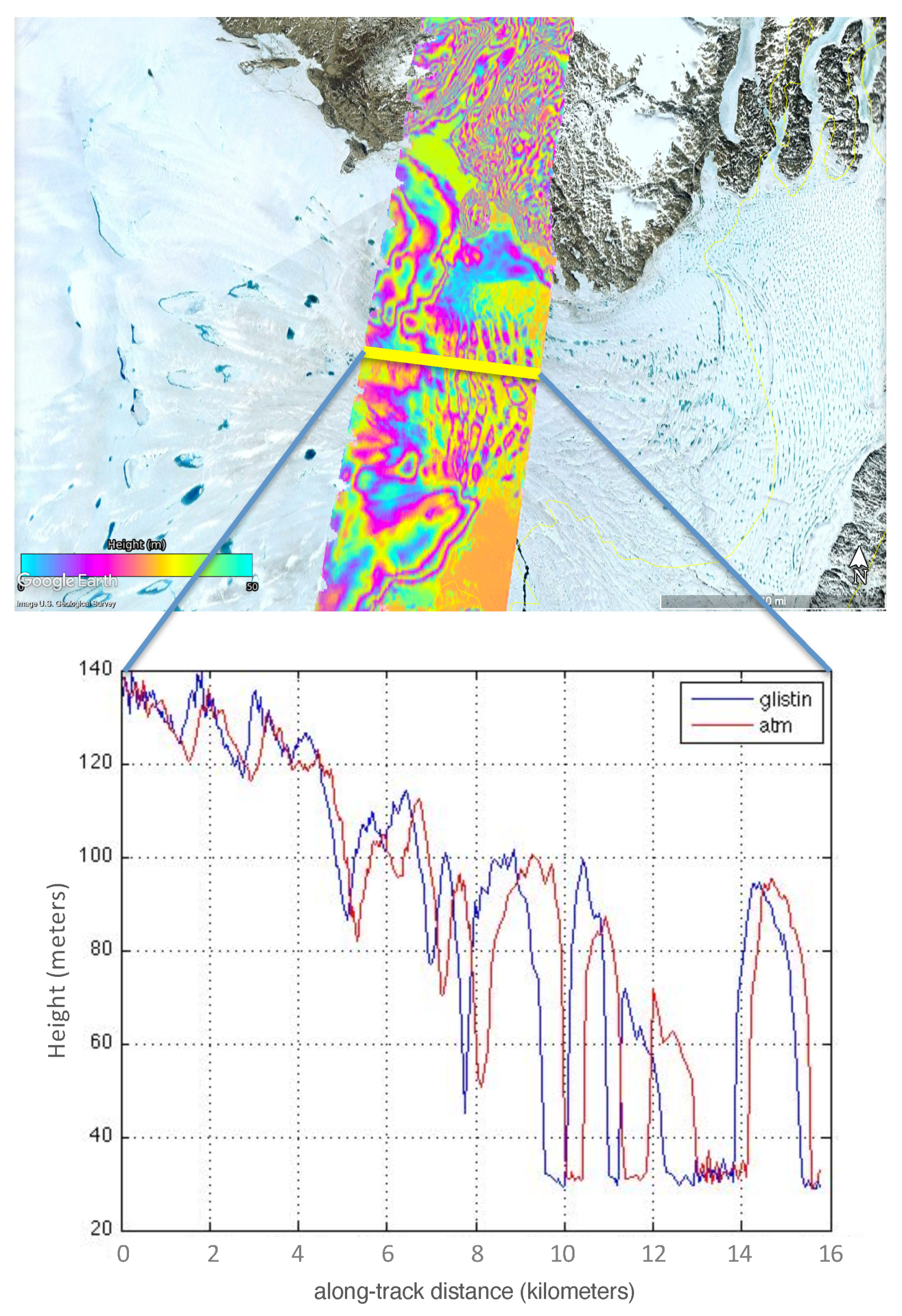
- For a given GLISTIN-A flight line identify all ATM platelets that fall within the swath;
- For each overlapping platelet location find the nearest GLISTIN-A 3 m pixel in sch coordinates;
- Average a 30 m × 30 m region centered about the platelet location;
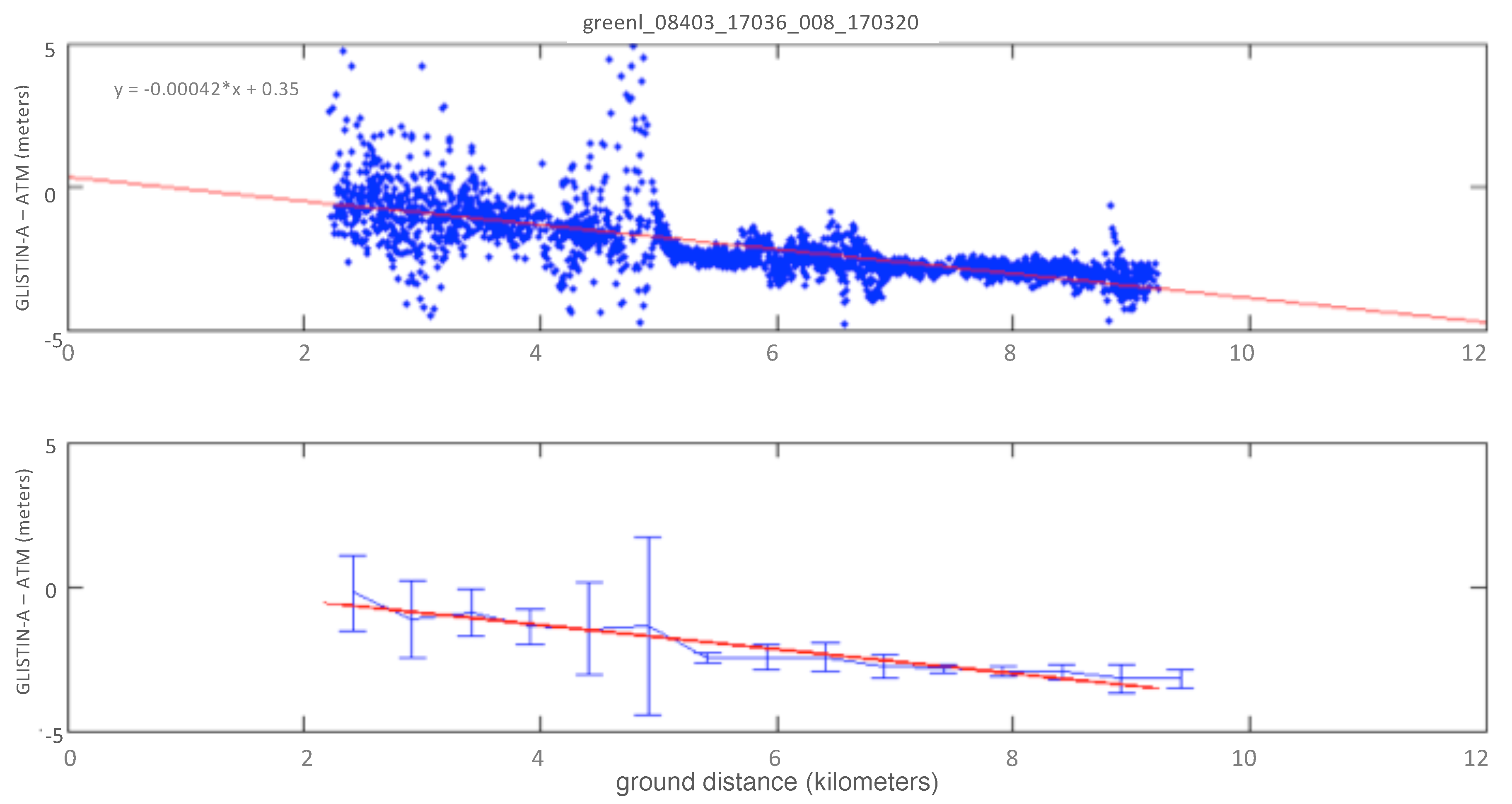
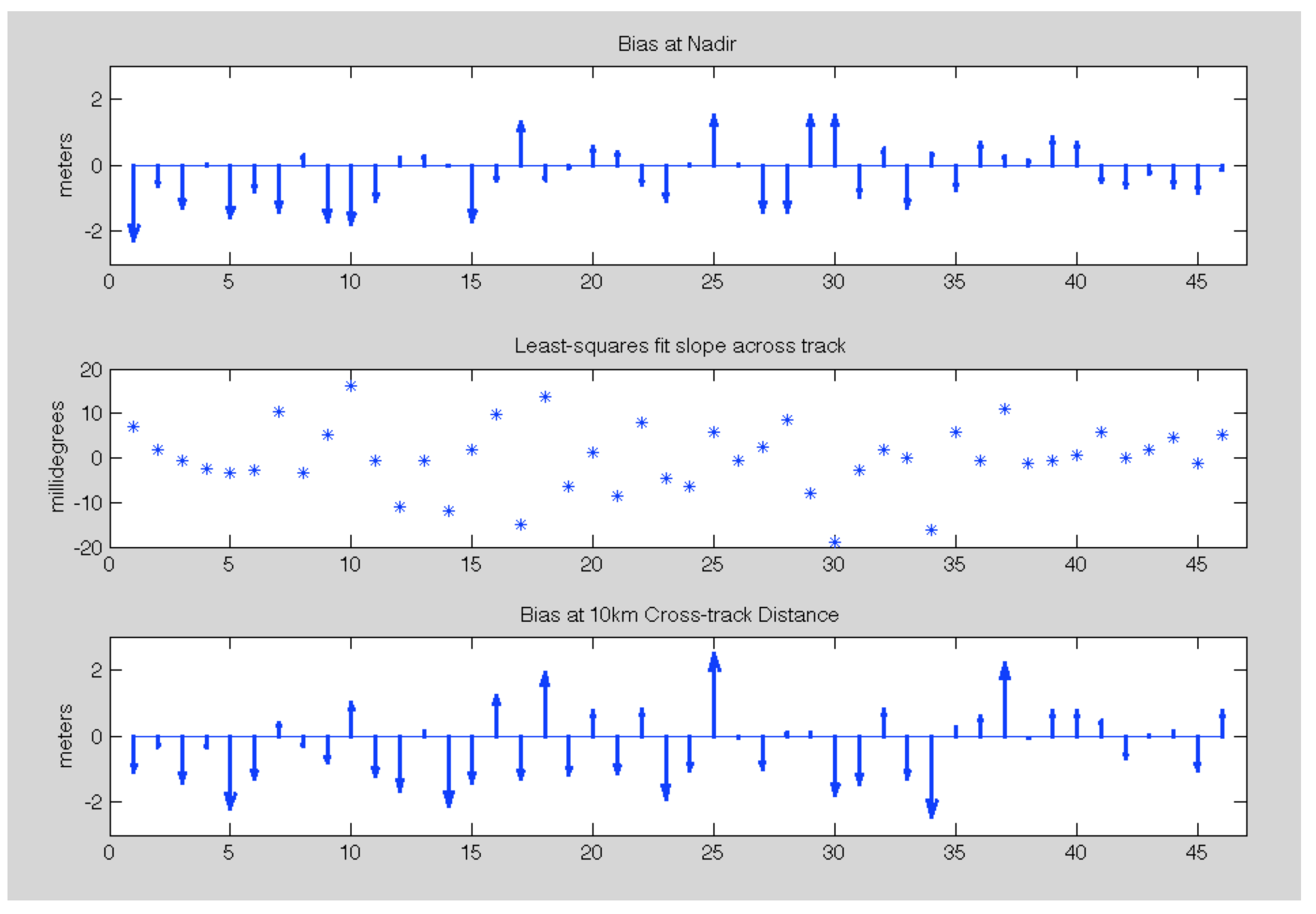
- Calculate the height error as ATM height—GLISTIN height. Record the estimated height error’s location in latitude and longitude in addition to along-track and cross-track (radar relative/ground-projected);
- Using geographic location, remove from comparison height differences over dynamic areas;
- perform a least-squares fit to the remaining height errors as a function of x (equivalently c).
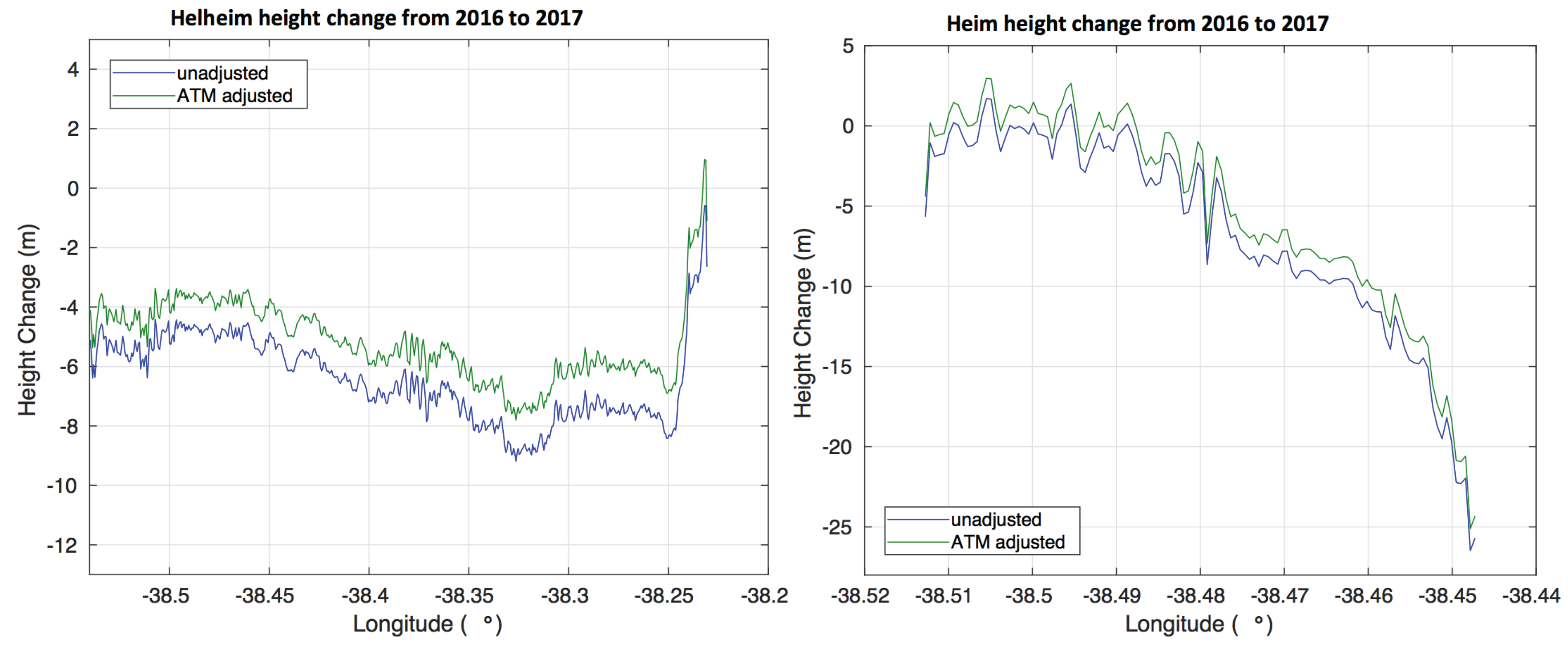
2.4.2. Estimating Yearly Volume Change
3. Discussion
4. Materials and Methods
4.1. Alaska 2013
4.1.1. GLISTIN-A Data
4.1.2. UAF Lidar Data
- ILAKS1B_2013_141_Hubbard.las; and
- ILAKS1B_2013_170_Nabesna.las.
4.2. OMG Data
GLISTIN-A Data
4.3. ATM Operation Icebridge Data
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Line Identifier | Height Bias (m) | Slope (mm/m) | Slope (mdeg) |
|---|---|---|---|
| greenl_00713_16031_000_160323 | −0.67 | 0.08 | 4.6 |
| greenl_00806_16043_002_160331 | −0.35 | 0.08 | 4.4 |
| greenl_02206_16035_001_160326 | −0.30 | 0.08 | 4.4 |
| greenl_02705_16035_000_160326 | −0.73 | 0.11 | 6.3 |
| greenl_04582_16033_001_160324 | 0.75 | −0.13 | −7.5 |
| greenl_05600_16027_002_160321 | −0.19 | 0.09 | 5.0 |
| greenl_06602_16028_005_160322 | −0.01 | −0.08 | −4.7 |
| greenl_07705_16043_001_160331 | −0.39 | 0.23 | 13.2 |
| greenl_09302_16026_001_160320 | −0.57 | 0.10 | 5.6 |
| greenl_09803_16026_007_160320 | −0.40 | 0.09 | 5.3 |
| greenl_09804_16026_009_160320 | −0.32 | −0.01 | 0.6 |
| greenl_09807_16031_001_160323 | 0.32 | −0.17 | −9.7 |
| greenl_13507_16031_004_160323 | −0.33 | −0.01 | −0.7 |
| greenl_15601_16027_009_160321 | 0.12 | 0.11 | 6.3 |
| greenl_18016_16026_010_160320 | 1.90 | −0.10 | −5.7 |
| greenl_21401_16037_016_160330 | −0.17 | −0.17 | −9.7 |
| greenl_23401_16043_003_160331 | −0.30 | 0.13 | 7.5 |
| greenl_27202_16026_002_160320 | −0.65 | −0.06 | 3.2 |
| greenl_27202_16026_003_160320 | −0.77 | 0.05 | 2.9 |
| Flight Line Identifier | Height Bias (m) | Slope (mm/m) | Slope (mdeg) |
|---|---|---|---|
| greenl_00713_17029_000_170313 | −2.3 | 0.12 | 6.9 |
| greenl_00806_17037_001_170321 | −0.63 | 0.03 | 2.0 |
| greenl_02705_17033_000_170315 | −1.3 | −0.06 | −3.3 |
| greenl_04582_17028_008_170311 | 0.04 | −0.04 | −2.4 |
| greenl_05601_17031_000_170314 | −1.60 | −0.06 | −3.6 |
| greenl_06603_17028_005_170311 | −0.79 | −0.05 | −2.8 |
| greenl_07705_17037_000_170321 | −1.40 | 0.18 | 10.3 |
| greenl_08009_17036_011_170320 | 0.29 | −0.06 | −3.3 |
| greenl_08907_17031_013_170314 | −1.70 | 0.09 | 5.3 |
| greenl_09303_17027_094_170311 | −1.80 | 0.28 | 16.0 |
| greenl_09800_17034_003_170317 | −1.10 | −0.01 | −0.6 |
| greenl_09807_17029_001_170313 | 0.23 | −0.19 | −10.9 |
| greenl_11309_17028_001_170311 | 0.26 | −0.01 | −0.7 |
| greenl_13507_17029_004_170313 | −0.02 | −0.21 | −12.0 |
| greenl_14921_17034_008_170317 | −1.70 | 0.03 | 1.5 |
| greenl_15207_17038_002_170322 | −0.48 | 0.17 | 9.7 |
| greenl_15603_17034_007_170317 | 1.30 | −0.26 | −14.9 |
| greenl_17104_17027_097_170311 | −0.49 | 0.24 | 13.8 |
| greenl_18017_17034_006_170317 | −0.09 | −0.11 | −6.3 |
| greenl_20604_17035_001_170317 | 0.56 | 0.02 | 1.1 |
| greenl_21401_17036_012_170320 | 0.38 | −0.15 | −8.6 |
| greenl_23401_17037_002_170321 | −0.59 | 0.14 | 8.0 |
| greenl_31505_17029_003_170313 | −1.10 | −0.08 | −4.4 |
| grland_22569_17028_007_170311 | 0.04 | −0.11 | −6.3 |
| greenl_00605_17028_004_170311 | 1.50 | 0.10 | 5.5 |
| greenl_00806_17037_003_170321 | 0.02 | −0.01 | −0.8 |
| greenl_01508_17034_001_170317 | −1.40 | 0.04 | 2.4 |
| greenl_01508_17035_000_170317 | −1.40 | 0.15 | 8.6 |
| greenl_02104_17031_004_170314 | 1.50 | −0.14 | −8.0 |
| greenl_02206_17033_001_170315 | 1.50 | −0.33 | −18.9 |
| greenl_02901_17031_005_170314 | −0.95 | −0.05 | −2.7 |
| greenl_04584_17029_012_170313 | 0.51 | 0.03 | 1.7 |
| greenl_04802_17029_002_170313 | −1.3 | 0.00 | −0.3 |
| greenl_08403_17036_008_170320 | 0.36 | −0.28 | −16.0 |
| greenl_10301_17037_010_170321 | −0.74 | 0.10 | 5.7 |
| greenl_16611_17038_000_170322 | 0.69 | −0.01 | −0.3 |
| greenl_17909_17034_002_170317 | 0.28 | 0.19 | 10.9 |
| greenl_17914_17037_011_170321 | 0.13 | −0.02 | −1.3 |
| greenl_21203_17038_004_170322 | 0.86 | −0.01 | −0.5 |
| greenl_21203_17038_005_170322 | 0.67 | 0.01 | 0.5 |
| greenl_24901_17037_004_170321 | −0.52 | 0.10 | 5.7 |
| greenl_26402_17035_020_170317 | −0.67 | 0.00 | −0.1 |
| greenl_27204_17027_095_170311 | −0.27 | 0.03 | 1.6 |
| greenl_31310_17036_009_170320 | −0.66 | 0.08 | 4.8 |
| greenl_33405_17031_012_170314 | −0.83 | −0.02 | −1.0 |
| greenl_34201_17037_006_170321 | −0.16 | 0.09 | 4.9 |
References
- Jevrejeva, S.; Jackson, L.P.; Grinsted, A.; Lincke, D.; Marzeion, B. Flood damage costs under the sea level rise with warming of 1.5 °C and 2 °C. Environ. Res. Lett. 2018, 13, 074014. [Google Scholar] [CrossRef]
- Willis, J.K.; Church, J.A. Regional Sea-Level Projection. Science 2012, 336, 550–551. [Google Scholar] [CrossRef] [PubMed]
- Lemke, P.; Ren, J.; Alley, R.B.; Allison, I.; Carrasco, J.; Flato, G.; Fujii, Y.; Kaser, G.; Mote, P.; Thomas, R.H.; et al. Observations: Changes in Snow, Ice and Frozen Ground; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Church, J.; Clark, P.; Cazenave, A.; Gregory, J.; Jevrejeva, S.; Levermann, A.; Merrifield, M.; Milne, G.; Nerem, R.; Nunn, P.; et al. Sea Level Change. In Climate Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Stocker, T., Qin, D., Plattner, G.K., Tignor, M., Allen, S., Boschung, J., Nauels, A., Xia, Y., Bex, V., Midgley, P., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2013; Book Section 13; pp. 1137–1216. [Google Scholar] [CrossRef]
- Krabill, W.; Thomas, R.; Martin, C.; Swift, R.; Frederick, E. Accuracy of airborne laser altimetry over the Greenland ice sheet. Int. J. Remote Sens. 1995, 7, 1211–1222. [Google Scholar] [CrossRef]
- McMillan, M.; Leeson, A.; Shepherd, A.; Briggs, K.; Armitage, T.W.K.; Hogg, A.; Kuipers Munneke, P.; van den Broeke, M.; Noël, B.; van de Berg, W.J.; et al. A high-resolution record of Greenland mass balance. Geophys. Res. Lett. 2016, 43, 7002–7010. [Google Scholar] [CrossRef] [Green Version]
- Markus, T.; Neumann, T.; Martino, A.J.; Abdalati, W.; Brunt, K.M.; Csathó, B.; Farrell, S.L.; Fricker, H.A.; Gardner, A.S.; Harding, D.J.; et al. The Ice, Cloud, and Land Elevation Satellite-2 (ICESat-2): Science Requirements, Concept, and Implementation. Remote. Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Moller, D.; Hensley, S.; Sadowy, G.A.; Fisher, C.D.; Michel, T.; Zawadzki, M.; Rignot, E. The Glacier and Land Ice Surface Topography Interferometer: An Airborne Proof-of-Concept Demonstration of High-Precision Ka-Band Single-Pass Elevation Mapping. IEEE Trans. Geosci. Remote Sens. 2011, 49, 827–842. [Google Scholar] [CrossRef]
- Moller, D.; Andreadis, K.M.; Bormann, K.J.; Hensley, S.; Painter, T.H. Mapping Snow Depth From Ka-Band Interferometry: Proof of Concept and Comparison with Scanning Lidar Retrievals. IEEE Geosci. Remote Sens. Lett. 2017, 14, 886–890. [Google Scholar] [CrossRef]
- Schumann, G.J.P.; Moller, D.K.; Mentgen, F. High-Accuracy Elevation Data at Large Scales from Airborne Single-Pass SAR Interferometry. Front. Earth Sci. 2016, 3, 88. [Google Scholar] [CrossRef]
- Fenty, I.; Willis, J.K.; Khazendar, A.; Dinardo, S.; Forsberg, R.; Fukumori, I.; Holland, D.; Jakobsson, M.; Moller, D.; Morison, J.; et al. Oceans Melting Greenland: Early Results from NASA’s Ocean-Ice Mission in Greenland. Oceanography 2016, 29, 72–83. [Google Scholar] [CrossRef]
- Hensley, S.; Moller, D.; Oveisgharan, S.; Michel, T.; Wu, X. Ka-Band Mapping and Measurements of Interferometric Penetration of the Greenland Ice Sheets by the GLISTIN Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2436–2450. [Google Scholar] [CrossRef]
- Rodriguez, E. Theory and design of interferometric synthetic aperture radars. IEE Proc. F (Radar Signal Process.) 1992, 139, 147–159. [Google Scholar] [CrossRef]
- Studinger, M. IceBridge ATM L2 Icessn Elevation, Slope, and Roughness; Version 2; NASA National Snow and Ice Data Center Distributed Archive Center: Boulder, CO, USA, 2014; Updated 2018. [CrossRef]
- Zebker, H.; Hensley, S.; Shanker, P.; Wortham, C. Geodetically Accurate InSAR Data Processor. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4309–4321. [Google Scholar] [CrossRef]
- Khazendar, A.; Fenty, I.G.; Carroll, D.; Gardner, A.; Lee, C.M.; Fukumori, I.; Wang, O.; Zhang, H.; Seroussi, H.; Moller, D.; et al. Interruption of Two decades of Jakobshavn Isbrae Acceleration and Thinning as Regional Ocean Cools. Nat. Geosci. 2019, 12, 277–283. [Google Scholar] [CrossRef]
- Howat, I.M.; Ahn, Y.; Joughin, I.; van den Broeke, M.R.; Lenaerts, J.T.M.; Smith, B. Mass balance of Greenland’s three largest outlet glaciers, 2000–2010. Geophys. Res. Lett. 2011, 38. [Google Scholar] [CrossRef]
- Joughin, I.; Smith, B.E.; Howat, I.M.; Scambos, T.; Moon, T. Greenland flow variability from ice-sheet-wide velocity mapping. J. Glaciol. 2010, 56, 415–430. [Google Scholar] [CrossRef] [Green Version]
- Faherty, D.; Schumann, G.J.; Moller, D. Bare Earth DEM Generation Using Image Classifiers in High-Resolution Single-Pass InSAR. Remote. Sens. Environ. 2019, submitted. [Google Scholar]
- Larsen, C. IceBridge UAF Lidar Scanner L1B Geolocated Surface Elevation Triplets; Version 1; updated 2018; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2010. [CrossRef]











| System Parameters | ||
|---|---|---|
| Center Frequency (GHz) | 35.66 | |
| Bandwidth (MHz) | 80 | |
| Polarization | HH | |
| Look angle range (deg) | 15–50 | |
| Single look slant-range resolution (m) | 1.8 | |
| Single look along-track resolution (m) | 0.25 | |
| Baseline length (m) | 0.25 | |
| Baseline angle (deg) | 45 | |
| IPY | GLISTIN-A | |
| Peak Transmit Power (W) | 40 | 56 |
| Receive Losses (dB) | 5 | 2 |
| Ping-pong | no | yes |
| Height precision for 30 × 30 m posting and 31 degree boresite (cm) | 14 | 17 |
| Nominal Flight Altitude (km) | 7 | 12 |
| Nominal Swath | 6 | 11 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moller, D.; Hensley, S.; Mouginot, J.; Willis, J.; Wu, X.; Larsen, C.; Rignot, E.; Muellerschoen, R.; Khazendar, A. Validation of Glacier Topographic Acquisitions from an Airborne Single-Pass Interferometer. Sensors 2019, 19, 3700. https://0-doi-org.brum.beds.ac.uk/10.3390/s19173700
Moller D, Hensley S, Mouginot J, Willis J, Wu X, Larsen C, Rignot E, Muellerschoen R, Khazendar A. Validation of Glacier Topographic Acquisitions from an Airborne Single-Pass Interferometer. Sensors. 2019; 19(17):3700. https://0-doi-org.brum.beds.ac.uk/10.3390/s19173700
Chicago/Turabian StyleMoller, Delwyn, Scott Hensley, Jeremie Mouginot, Joshua Willis, Xiaoqing Wu, Christopher Larsen, Eric Rignot, Ronald Muellerschoen, and Ala Khazendar. 2019. "Validation of Glacier Topographic Acquisitions from an Airborne Single-Pass Interferometer" Sensors 19, no. 17: 3700. https://0-doi-org.brum.beds.ac.uk/10.3390/s19173700