Differential Temperature Sensors: Review of Applications in the Test and Characterization of Circuits, Usage and Design Methodology


Abstract
:1. Introduction
2. State-of-the-Art: Thermal Monitoring of Analog Circuits. Principles, Techniques and Sensors
2.1. Use of Differential Temperature Sensor
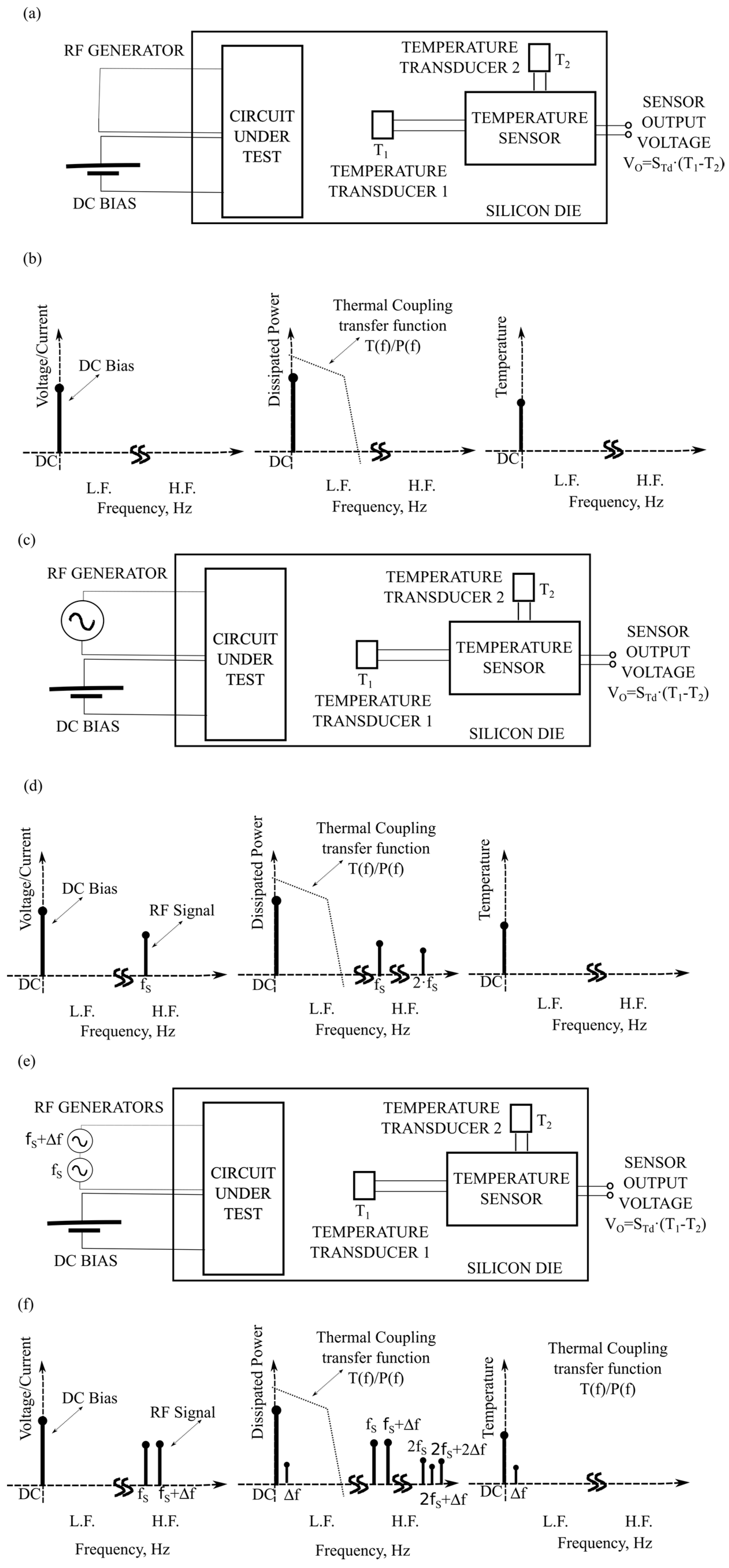
2.2. Circuit under Test Biasing Strategies: DC, Homodyne and Heterodyne Temperature Measurements
2.3. Differential Temperature Sensors. State-of-the-Art
3. Differential Temperature Sensor with High Sensitivity and High Dynamic Range
3.1. Basic Differential Temperature Sensor
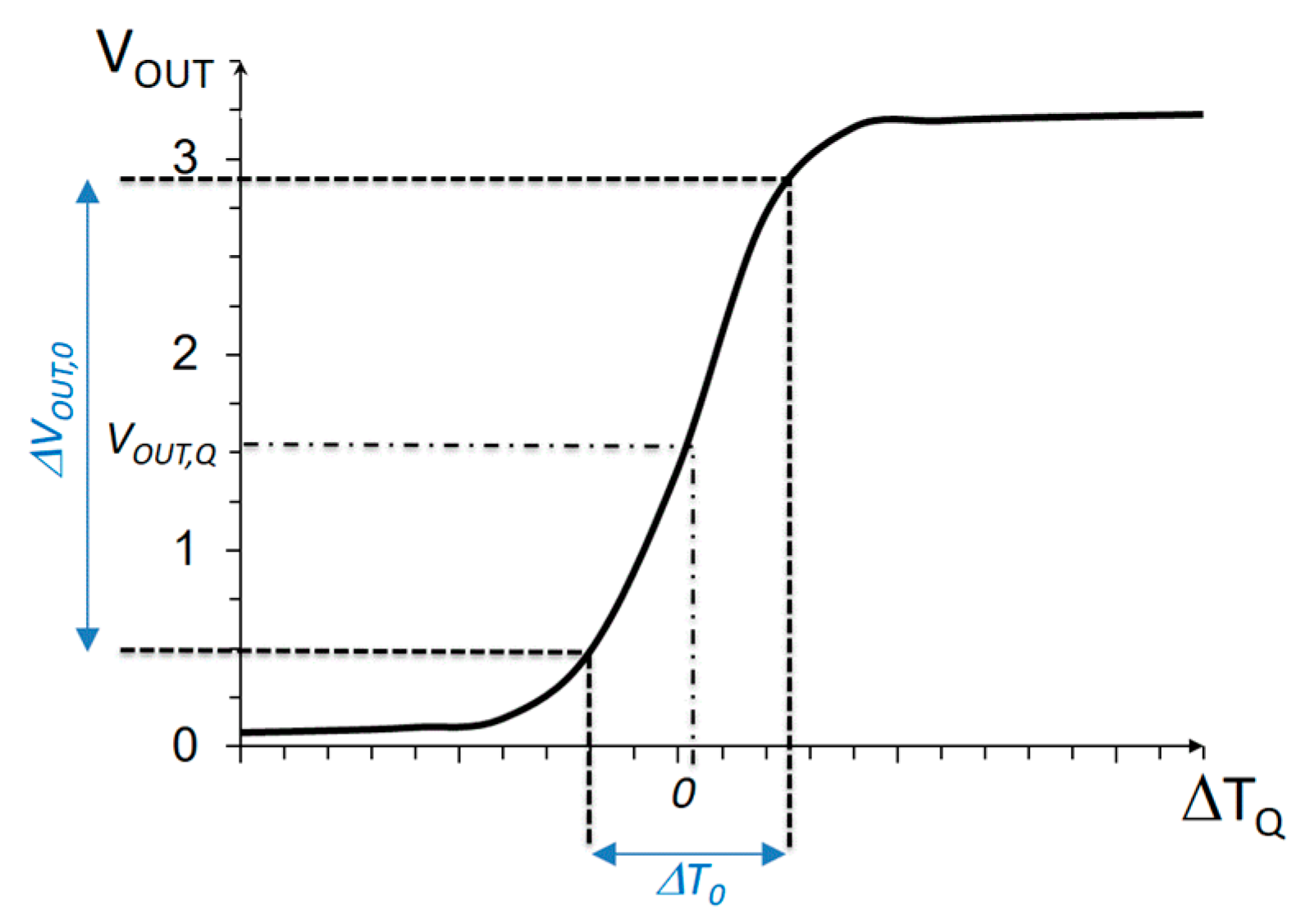
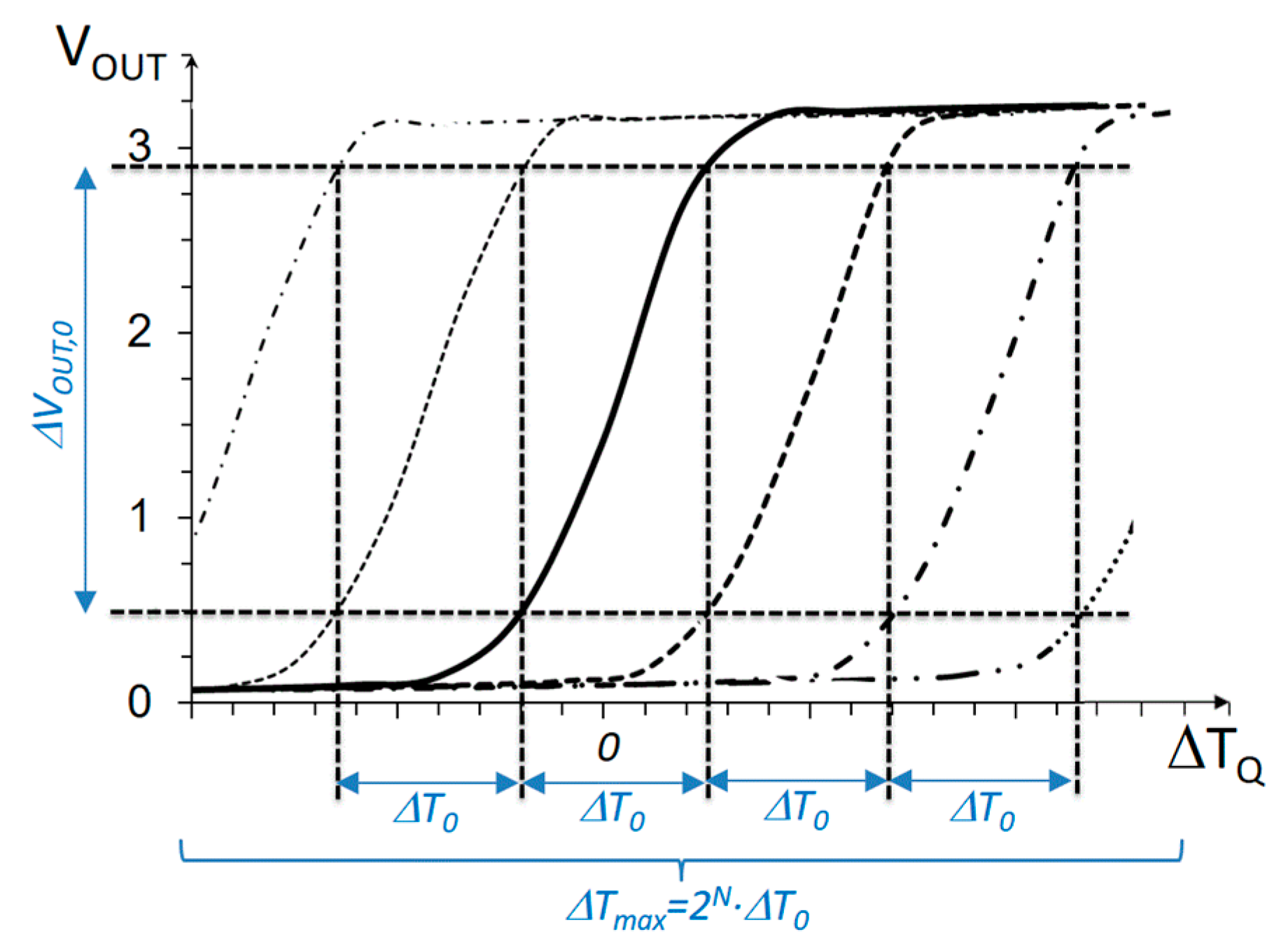
3.2. Extending the Dynamic Range
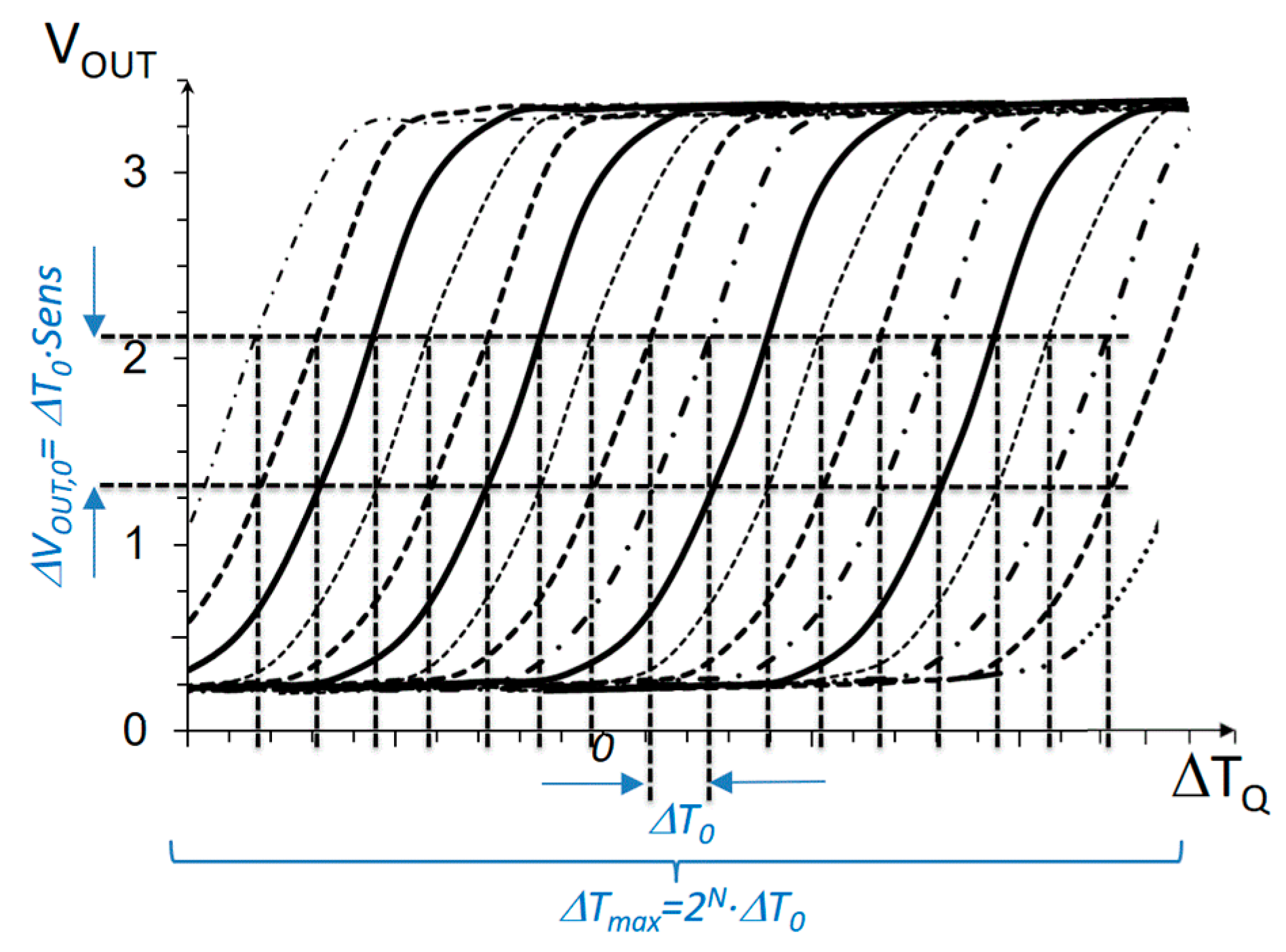
3.3. Improving Resolution
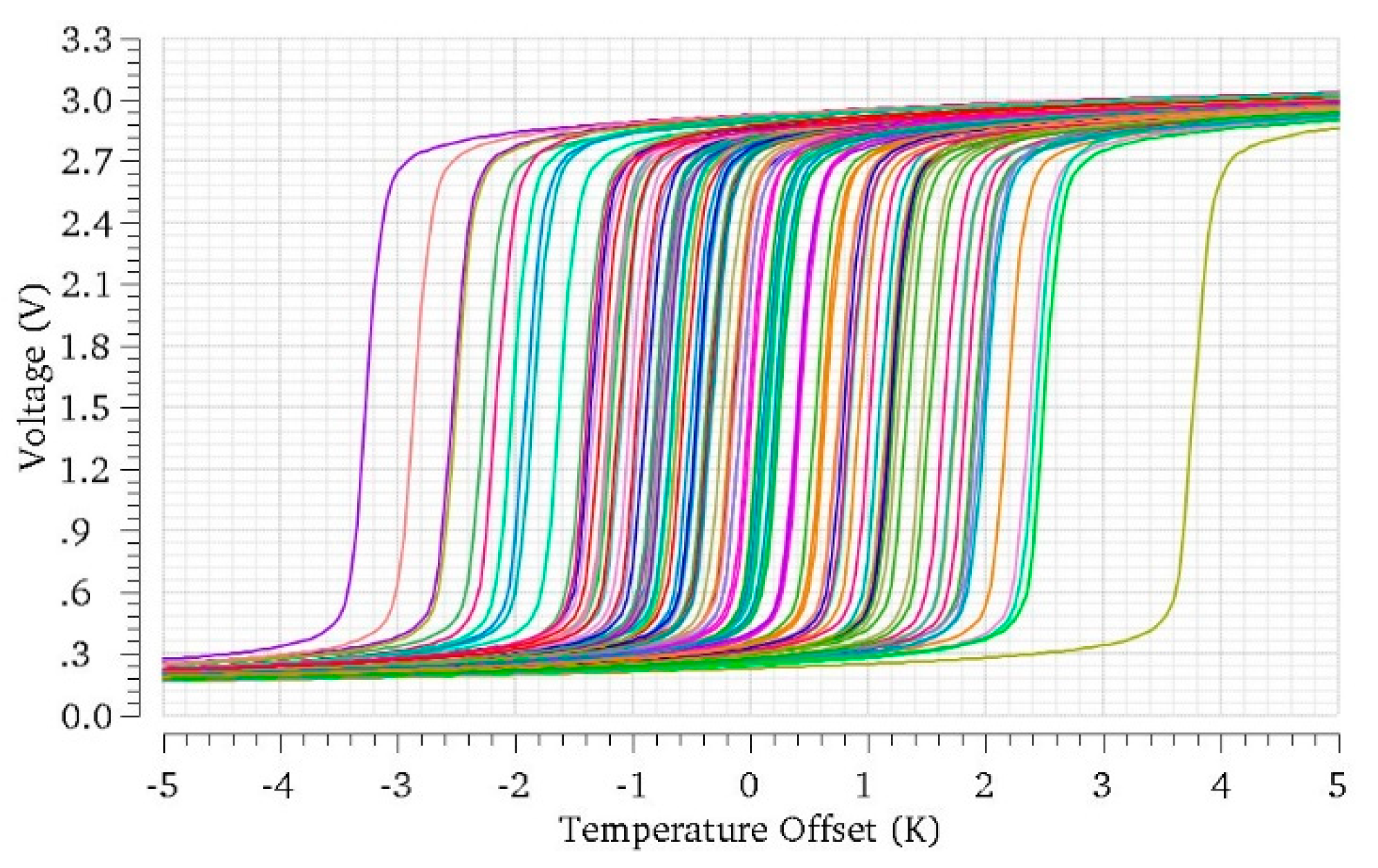
3.4. Correction of Variability Offsets
4. Design Methodology for the Temperature Sensor
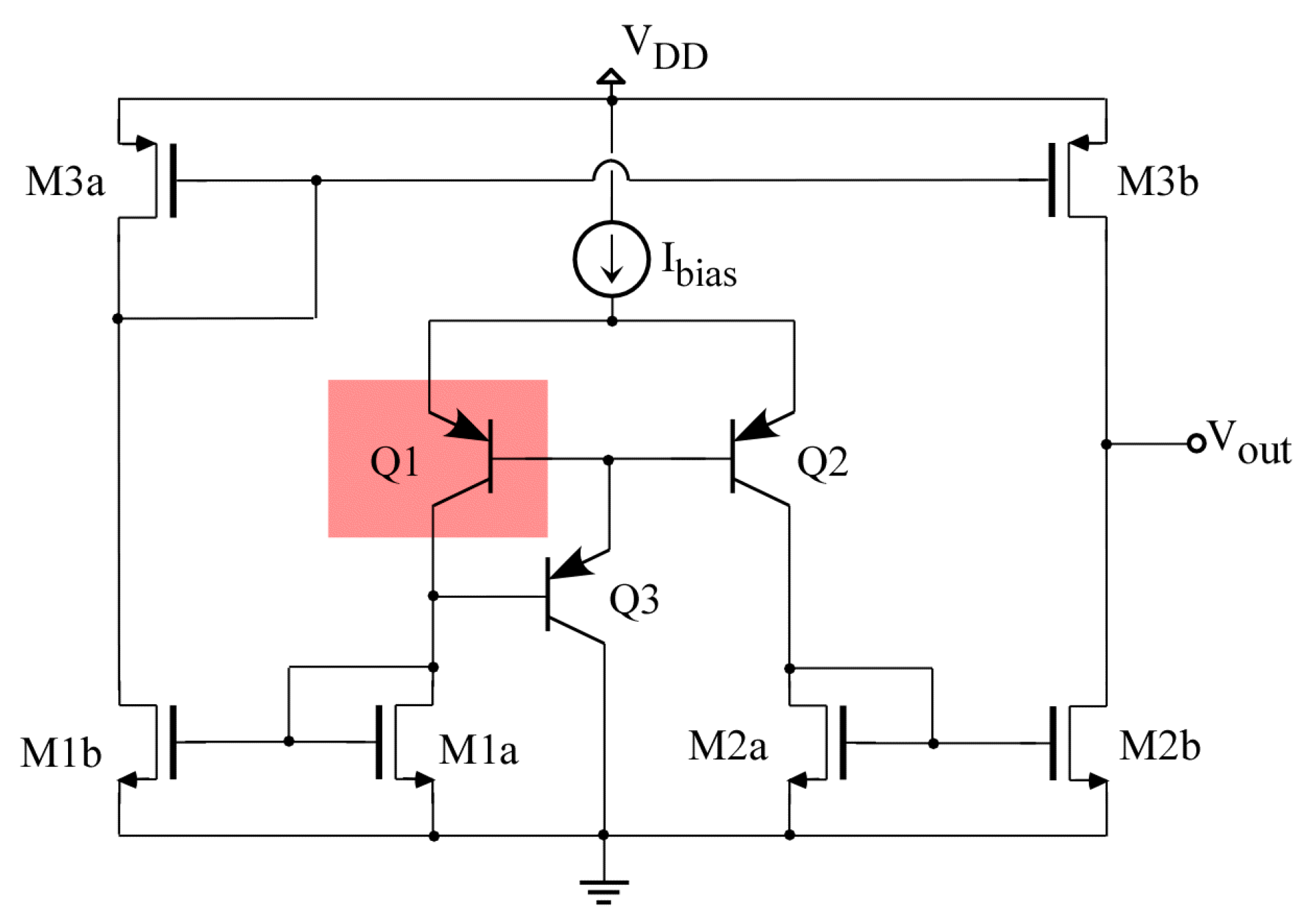
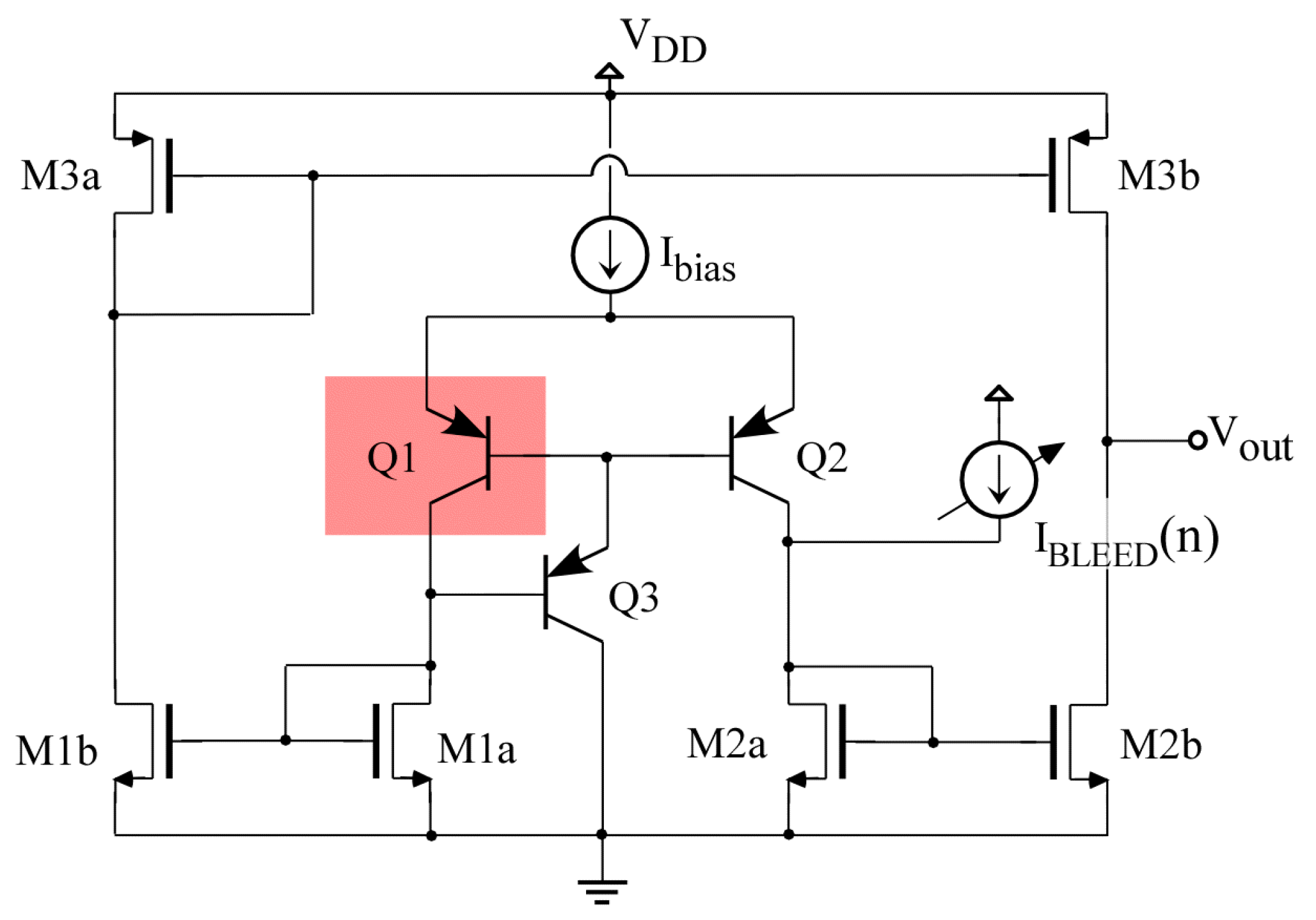
4.1. Sensor Core
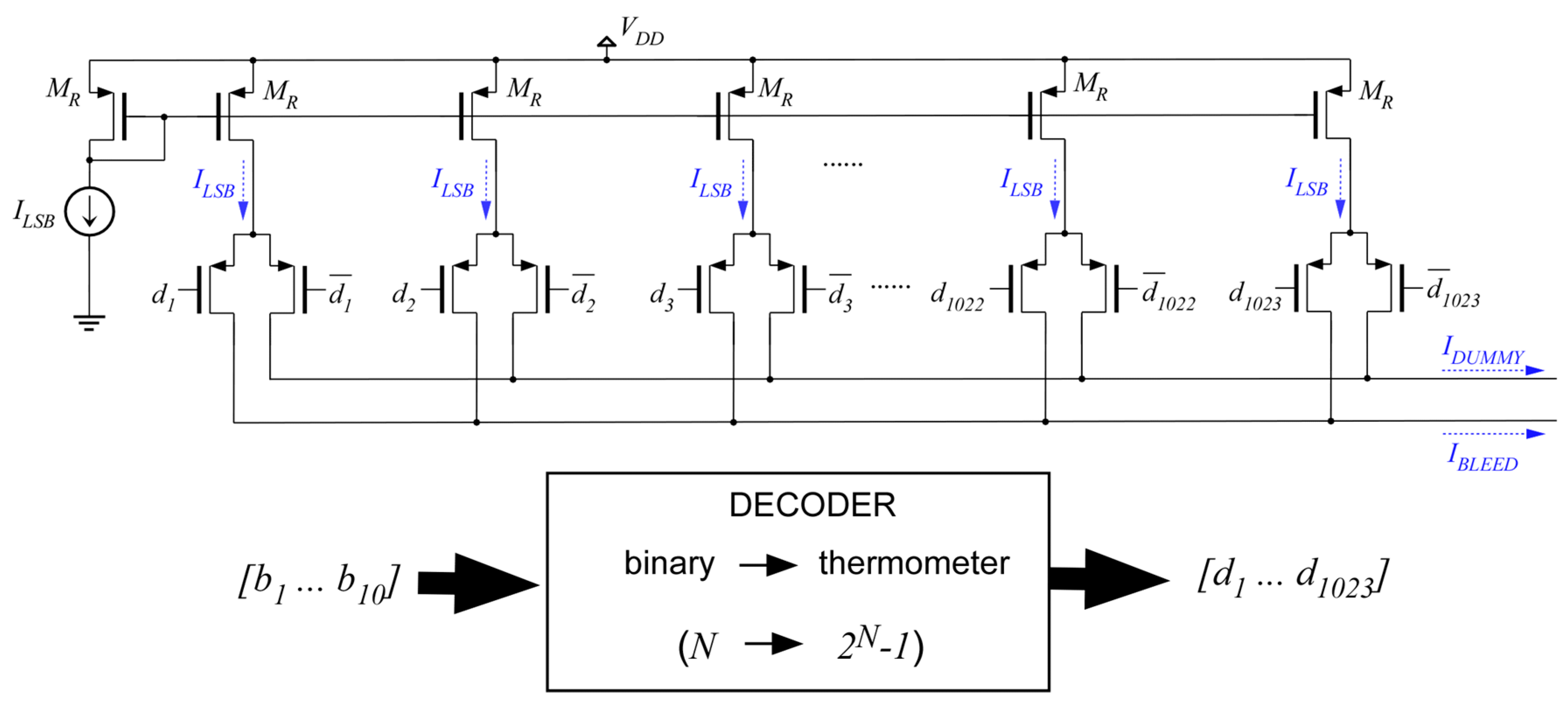
4.2. Current Bleeding
5. Implementation of the Temperature Sensor to Monitor Aging Degradation of a RF Power Amplifier
5.1. Power Amplifier
5.2. Temperature Sensor with Bleeding Sources
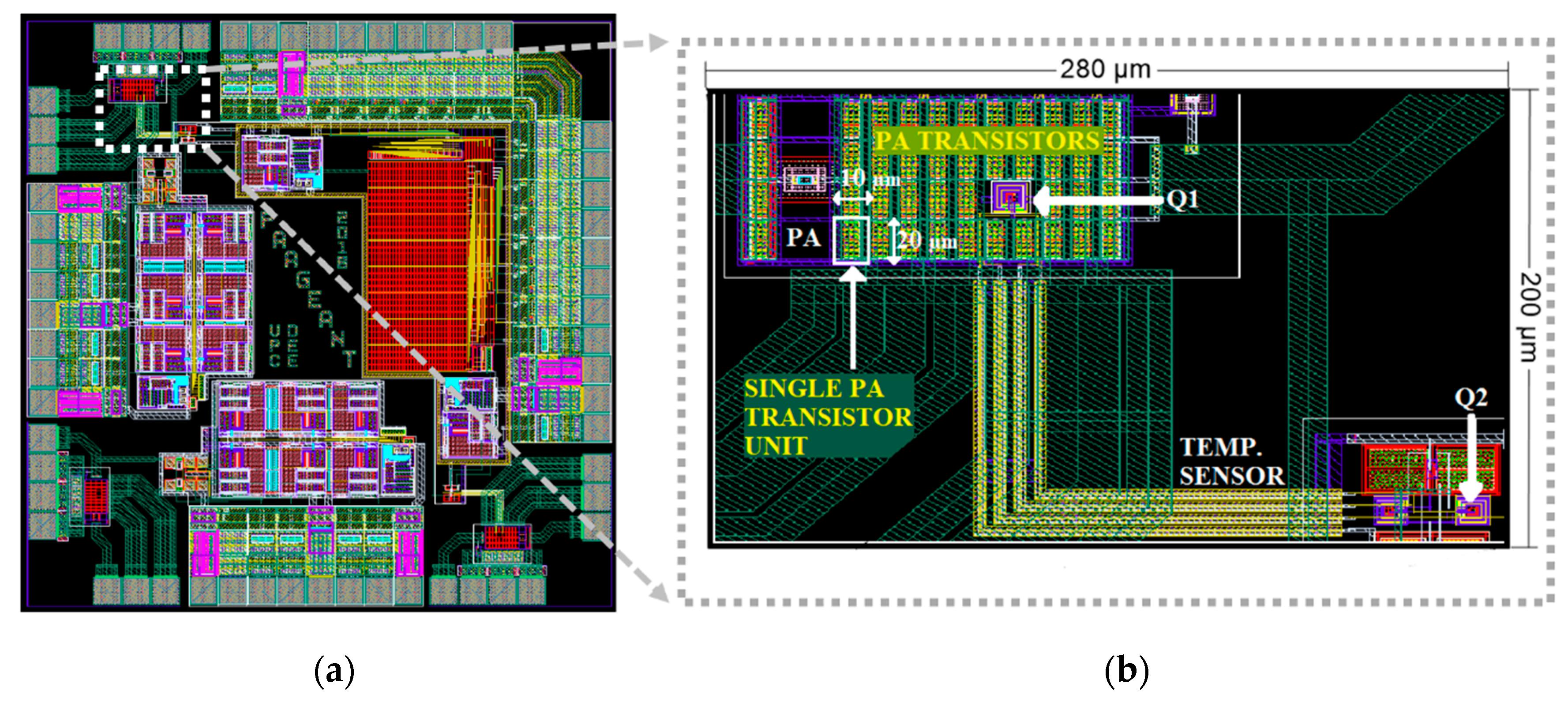
5.3. Layout
5.4. Example of Use of the Differential Thermal Sensor to Monitor Aging
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- McGowen, R.; Poirier, C.A.; Bostak, C.; Ignowski, J.; Millican, M.; Parks, W.H.; Naffziger, S. Power and temperature control on a 90-nm Itanium family processor. IEEE J. Solid-State Circuits 2006, 71, 229–237. [Google Scholar] [CrossRef]
- Woo, K.; Meninger, S.; Xanthopoulos, T.; Crain, E.; Ha, D.; Han, D. Dual-DDL-based CMOS all-digital temperature sensor for microprocessor thermal monitoring. In Proceedings of the 2009 IEEE ISSCC, San Francisco, CA, USA, 8–12 February 2009. [Google Scholar]
- Shor, J.S.; Luria, K. Miniaturized BJT-Based Thermal Sensor for Microprocessors in 32- and 22-nm Technologies. IEEE J. Solid-State Circuits 2013, 48, 2860–2867. [Google Scholar] [CrossRef]
- Duarte, D.E.; Geannopoulos, G.; Mughal, U.; Wong, K.L.; Taylor, G. Temperature Sensor Design in a High Volume Manufacturing 65nm CMOS Digital Process. In Proceedings of the 2007 IEEE Custom Integrated Circuits Conference, San Jose, CA, USA, 16–19 September 2007; pp. 221–224. [Google Scholar]
- Kong, J.; John, J.K.; Chung, E.Y.; Chung, S.W.; Hu, J. On the Thermal Attack in Instruction Caches. IEEE Trans. Dependable Secure Comput. 2010, 7, 217–223. [Google Scholar] [CrossRef]
- Yan, M.; Wei, H.; Onabajo, M. Modeling of Thermal Coupling and Temperature Sensor Circuit Design Considerations for Hardware Trojan Detection. In Proceedings of the 2018 IEEE 61st MWSCAS, Windsor, ON, Canada, 5–8 August 2018; pp. 857–860. [Google Scholar]
- Bowers, S.M.; Sengupta, K.; Dasgupta, K.; Parker, B.D.; Hajimiri, A. Integrated Self-Healing for mm-Wave Power Amplifiers. IEEE Trans. Microw. Theory Tech. 2013, 61, 1301–1315. [Google Scholar] [CrossRef]
- Liu, J.Y.C.; Berenguer, R.; Chang, M.C.F. Millimeter-Wave Self-healing Power Amplifier With Adaptative Amplitude and Phase Linearization in 65 nm CMOS. IEEE Trans. Microw. Theory Tech. 2012, 60, 1342–1352. [Google Scholar] [CrossRef]
- Sun, S.; Wang, F.; Yaldiz, S.; Li, X.; Pileggi, L.; Natarajan, A.; Ferriss, M.; Pouchart, J.O.; Sadhu, B.; Parker, B.; et al. Indirect Performance Sensing for On-Chip Self-Healing of Analog and RF Circuits. IEEE Trans. Circuits Syst. I Regul. Pap. 2014, 61, 2243–2252. [Google Scholar] [CrossRef]
- Aragonés, X.; Mateo, D.; González, J.L.; Vidal, E.; Gómez, D.; Martineau, D.; Altet, J. DC Temperature measurements to characterize the central frequency and 3dB Bandwidth in mmW Power Amplifier. IEEE Microw. Wirel. Compon. Lett. 2015, 15, 745–747. [Google Scholar] [CrossRef]
- Abdallah, L.; Stratigopoulos, H.G.; Mir, S.; Altet, J. Defect-oriented non-intrusive RF test using on-chip temperature sensors. In Proceedings of the 2013 IEEE 31st VLSI Test Symposium, Berkeley, CA, USA, 29 April–2 May 2013; pp. 1–6. [Google Scholar]
- Onabajo, M.; Silva-Martínez, J. Analog Circuit Design for Process Variation-Resilient Systems-on-a-Chip; Springer: New York, NY, USA, 2012. [Google Scholar]
- Pan, S.; Luo, Y.; Makinwa, K.A.A. A Resistor-Based Temperature Sensor With a 0.13 pJ·K2 Resolution FoM. IEEE J. Solid-State Circuits 2018, 53, 164–173. [Google Scholar] [CrossRef]
- Pertijs, M.A.P.; Aita, A.L.; Makinwa, K.A.A.; Huijsing, J.H. Low-cost calibration techniques for smart temperature sensors. IEEE Sens. J. 2010, 10, 1098–1105. [Google Scholar] [CrossRef]
- Aita, A.L.; Pertijs, M.A.P.; Makinwa, K.A.A.; Huijsing, J.H.; Meijer, G.C.M. Low-power CMOS smart temperature sensor with a batch-calibrated inaccuracy of ±0.25 °C (±3σ) from -70 °C to 130 °C. IEEE Sens. J. 2013, 13, 1840–1848. [Google Scholar] [CrossRef]
- Heidari, A.; Abdollahpour, G.W.M.; Meijer, G.C.M. Design of a temperature sensor with optimized noise-power performance. Sens. Actuators A Phys. 2018, 282, 79–89. [Google Scholar] [CrossRef]
- Ituero, P.; López-Vallejo, M.; López-Barrio, C. A 0.0016mm2 0.64nJ Leakage-Based Temperature Sensor. Sensors 2013, 13, 12648–12662. [Google Scholar] [CrossRef] [PubMed]
- An, Y.J.; Ryu, K.; Jung, D.H.; Woo, S.H.; Jung, S.O. An energy efficient time-domain temperature sensor for low-power on-chip thermal management. IEEE Sens. J. 2014, 14, 104–110. [Google Scholar] [CrossRef]
- Chouhan, S.S.; Halonen, K. A low power temperature to frequency converter for the on-chip temperature measurement. IEEE Sens. J. 2015, 15, 4234–4240. [Google Scholar] [CrossRef]
- Chen, P.; Huang, G.; Shyu, Y.; Chang, S. A Primary-Auxiliary Temperature Sensing Scheme for Multiple Hotspots in System-on-a-Chips. IEEE Sens. J. 2014, 14, 2633–2642. [Google Scholar] [CrossRef]
- Reverter, F.; Gómez, D.; Altet, J. On-Chip MOSFET Temperature Sensor for Electrical Characterization of RF Circuits. IEEE Sens. J. 2013, 13, 3343–3344. [Google Scholar] [CrossRef]
- Perpiñà, X.; Jordà, X.; Vellvehi, M.; Altet, J.; Mestres, N. Steady-state sinusoïdal thermal characterization at chip level by internal infrared-laser deflection. J. Phys. D Appl. Phys. 2008, 41, 155508. [Google Scholar] [CrossRef]
- Altet, J.; Rubio, A.; Schaub, E.; Dilhaire, S.; Claeys, W. Thermal coupling in integrated circuits: Applications to thermal testing. J. Solid State Circuits 2001, 6, 81–91. [Google Scholar] [CrossRef]
- Antognetti, P.; Bisio, G.R.; Curatelli, F.; Palara, S. Three-dimensional transient thermal simulation: Application to delayed short circuit protection in power Ics. IEEE J. Solid-State Circuits 1980, 15, 277–281. [Google Scholar] [CrossRef]
- Solomon, J.E. The monolothic op amp: A tutorial study. IEEE J. Solid-State Circuits 1974, 9, 314–332. [Google Scholar] [CrossRef]
- Altet, J.; Rubio, A. Differential sensing strategy for dynamic thermal testing of ICs. In Proceedings of the 15th IEEE VLSI Test Symposium, Monterey, CA, USA, 27 April–1 May 1997; pp. 434–439. [Google Scholar]
- Altet, J.; González, J.L.; Gómez, D.; Perpiñà, X.; Claeys, W.; Grauby, S.; Dufis, C.; Vellvehi, M.; Mateo, D.; Reverter, F.; et al. Electro-thermal characterization of a differential temperature sensor in a 65 nm CMOS IC: Applications to gain monitoring in RF amplifiers. Microelectron. J. 2014, 45, 484–490. [Google Scholar] [CrossRef]
- Altet, J.; Claeys, W.; Dilhaire, S.; Rubio, A. Dynamic Surface Temperature Measurements in ICs. Proc. IEEE 2006, 94, 1519–1533. [Google Scholar] [CrossRef]
- Onabajo, M.; Gómez, D.; Aldrete-Vidrio, E.; Altet, J.; Mateo, D.; Silva-Martínez, J. Survey of Robustness Enhancement Techniques for Wireless Systems-on-a-Chip and Study of Temperature as Observable for Process Variations. J. Electron. Test. 2011, 27, 225–240. [Google Scholar] [CrossRef] [Green Version]
- Altet, J.; Mateo, D.; Gómez, D.; Perpiñà, X.; Vellvehi, M.; Jordà, X. DC temperatura measurements for power gain monitoring in RF power amplifiers, Proc. In Proceedings of the 2012 IEEE International Test Conference, Anaheim, CA, USA, 5–8 November 2012; pp. 1–8. [Google Scholar]
- Altet, J.; Gómez, D.; Perpinyà, X.; Mateo, D.; González, J.L.; Vellvehi, M.; Jordà, X. Effiency determination of RF linear power amplifiers by steady-state temperature monitors using built-in sensors. Sens. Actuators A Phys. 2013, 192, 49–57. [Google Scholar] [CrossRef]
- Altet, J.; Mateo, D.; Gómez, D.; González, J.L.; Marniteau, B.; Siligaris, A.; Aragonés, X. Temperature Sensors to Measure the Central Frequency and 3 dB Bandwidth in mmW Power Amplifiers. IEEE Microw. Wirel. Compon. Lett. 2014, 24, 272–274. [Google Scholar] [CrossRef]
- Altet, J.; Aldrete-Vidrio, E.; Mateo, D.; Perpiñà, X.; Jordà, X.; Vellvehi, M.; Millán, J.; Salhi, A.; Grauby, S.; Claeys, W.; et al. A heterodyne method for the thermal observation of the electrical behavior of high-frequency integrated circuits. Meas. Sci. Technol. 2008, 19, 115704. [Google Scholar] [CrossRef]
- Onabajo, M.; Altet, J.; Aldrete-Vidrio, E.; Mateo, D.; Silva-Martínez, J. Electrothermal design procedure to observe RF circuit power and linearity characteristics with a homodyne differential temperature sensor. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 458–469. [Google Scholar] [CrossRef]
- Aldrete-Vidrio, E.; Mateo, D.; Altet, J. Differential Temperature Sensors Fully Compatible with a 0.35 µm CMOS Process. IEEE Trans. Compon. Packag. Technol. 2007, 30, 618–626. [Google Scholar] [CrossRef]
- Aldrete-Vidrio, E.; Mateo, D.; Altet, J.; Salhi, M.A.; Grauby, S.; Dilhaire, S.; Onabajo, M.; Silva-Martínez, J. Strategies for built-in characterization testing and performance monitoring of analog RF circuits with temperature measurements. Meas. Sci. Technol. 2010, 21, 07514. [Google Scholar] [CrossRef]
- Barajas, E.; Rungta, A.; Mateo, D.; Aragones, X.; Altet, J. On the Use of Built-in Temperature Sensors to Monitor Aging in RF Circuits. In Proceedings of the XXXIV Conference on Design of Circuits and Integrated Systems, Bilbao, Spain, 20–22 November 2019. [Google Scholar]
- Vidal, E.; Ruiz, S.; Duquenoy, J.; Gonzalez, J.L.; Altet, J. Differential temperature sensor with high sensitivity, wide dynamic range and digital offset calibration. Sens. Actuators A Phys. 2017, 263, 373–379. [Google Scholar] [CrossRef]
- Carusone, T.C.; Johns, D.; Martin, K. Analog Integrated Circuit Design, 2nd ed.; John Wiley & Sons: Amelia Island, FL, USA, 2011. [Google Scholar]
- Sarkar, S.; Banerjee, S. An 8-bit 1.8 V 500 MSPS CMOS Segmented Current Steering DAC. In Proceedings of the IEEE Computer Society Annual Symposium on VLSI, Tampa, FL, USA, 13–15 May 2009; pp. 268–273. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Technology | Transducer Device | CUT | Figure of Merit Monitored | CUT Driving Technique |
|---|---|---|---|---|---|
| [23] | 1.5 µm, BiCMOS | Bipolar | Digital | Current consumption | Transient measurement |
| [34] | 0.18 µm, CMOS | Parasitic vertical | LNA, 1.7 MHz | 1dB Compression point | Homodyne |
| [30,31] | 65 nm CMOS, triple well | Parasitic vertical | Power amplifier, 2-2.5 GHz | Output power, efficiency | Homodyne |
| [11] | 0.25 µm, BiCMOS | Bipolar | LNA, 2.4 GHz | Structural test | Homodyne, DC measurements |
| [10] | 65nm CMOS, triple well | Parasitic vertical | Power amplifier, 60 GHz | Central freq., 3dB bandwidth | Homodyne |
| [32] | 65nm CMOS, triple well | Parasitic vertical | Power amplifier, 60 GHz | Central freq., 3dB bandwidth | Heterodyne |
| [35] | 0.35 µm, CMOS | Parasitic lateral | MOS transistor | Homodyne | |
| [36] | 0.25 µm, CMOS. Triple Well | Parasitic vertical | LNA, 1GHz | Central freq., 1dB compression point | Heterodyne |
| IBIAS = 1 µA | IBIAS = 6 µA | |
|---|---|---|
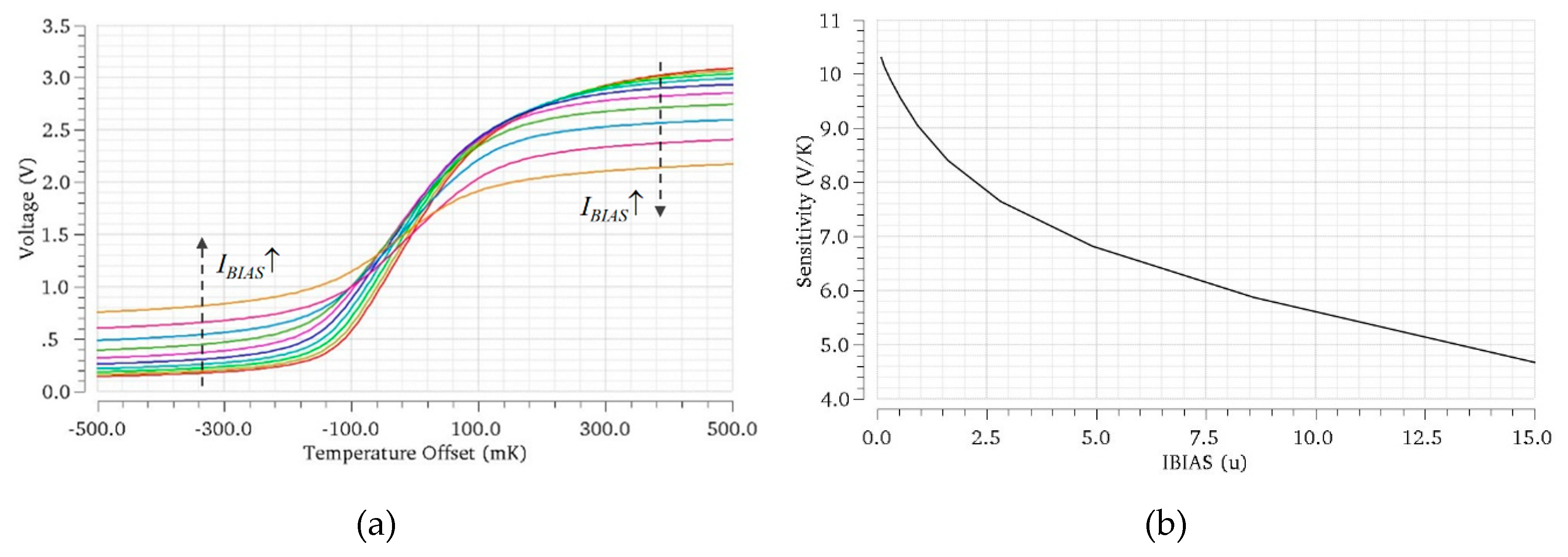
| Sensitivity (V/K) | 8.9 | 6.5 |
| Bandwidth (kHz) | 11.5 | 46.12 |
| Slew Rate (kV/s) | 11.3 | 45.8 |
| Value | |
|---|---|
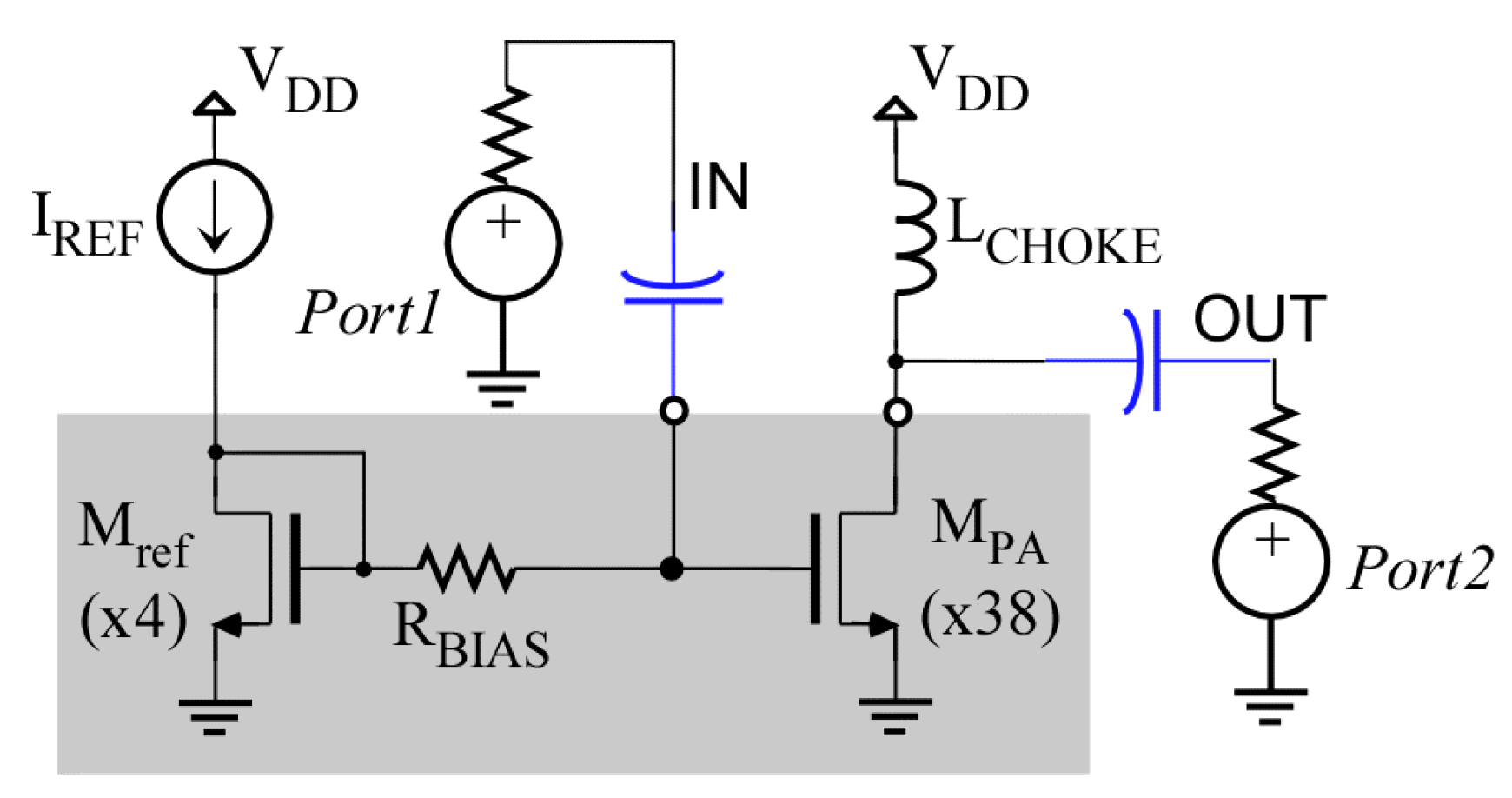
| Power Supply Voltage (V) | 3.3 |
| Operating Frequency (GHz) | 2.45 |
| Power Gain (dB) | 6.9 |
| P1dB (dBm) | 13.5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barajas, E.; Aragones, X.; Mateo, D.; Altet, J. Differential Temperature Sensors: Review of Applications in the Test and Characterization of Circuits, Usage and Design Methodology. Sensors 2019, 19, 4815. https://0-doi-org.brum.beds.ac.uk/10.3390/s19214815
Barajas E, Aragones X, Mateo D, Altet J. Differential Temperature Sensors: Review of Applications in the Test and Characterization of Circuits, Usage and Design Methodology. Sensors. 2019; 19(21):4815. https://0-doi-org.brum.beds.ac.uk/10.3390/s19214815
Chicago/Turabian StyleBarajas, Enrique, Xavier Aragones, Diego Mateo, and Josep Altet. 2019. "Differential Temperature Sensors: Review of Applications in the Test and Characterization of Circuits, Usage and Design Methodology" Sensors 19, no. 21: 4815. https://0-doi-org.brum.beds.ac.uk/10.3390/s19214815