Analysis and Evaluation of the Image Preprocessing Process of a Six-Band Multispectral Camera Mounted on an Unmanned Aerial Vehicle for Winter Wheat Monitoring

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
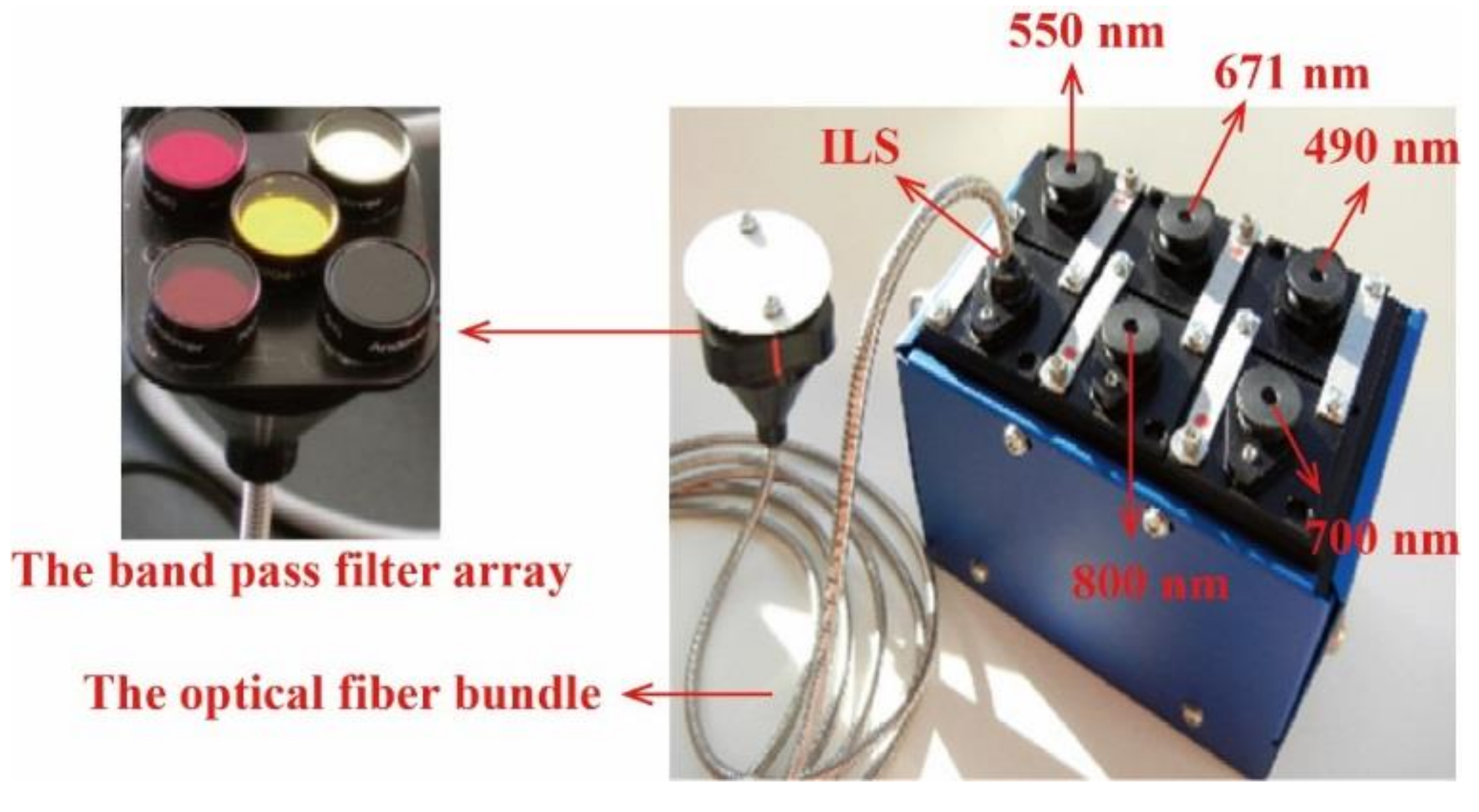
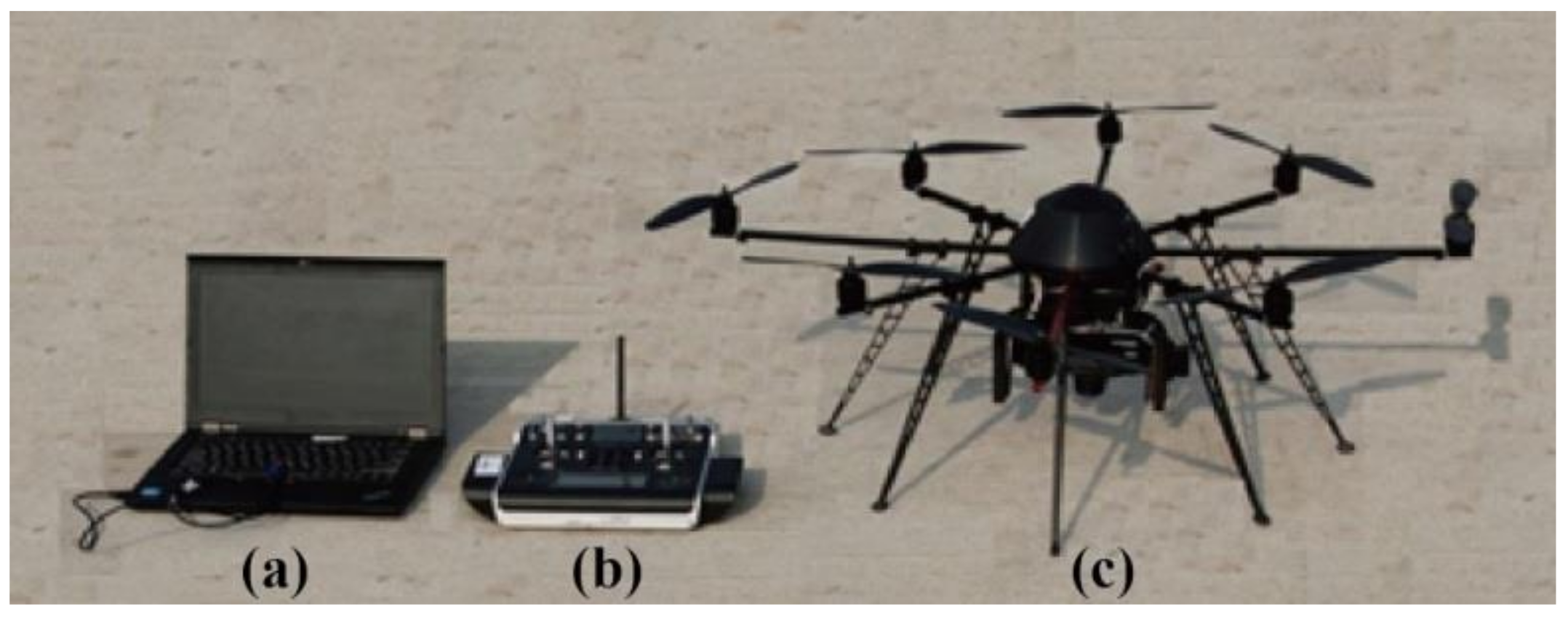
2.1. Imaging Sensor and UAV System
2.2. Image-Preprocessing Methods
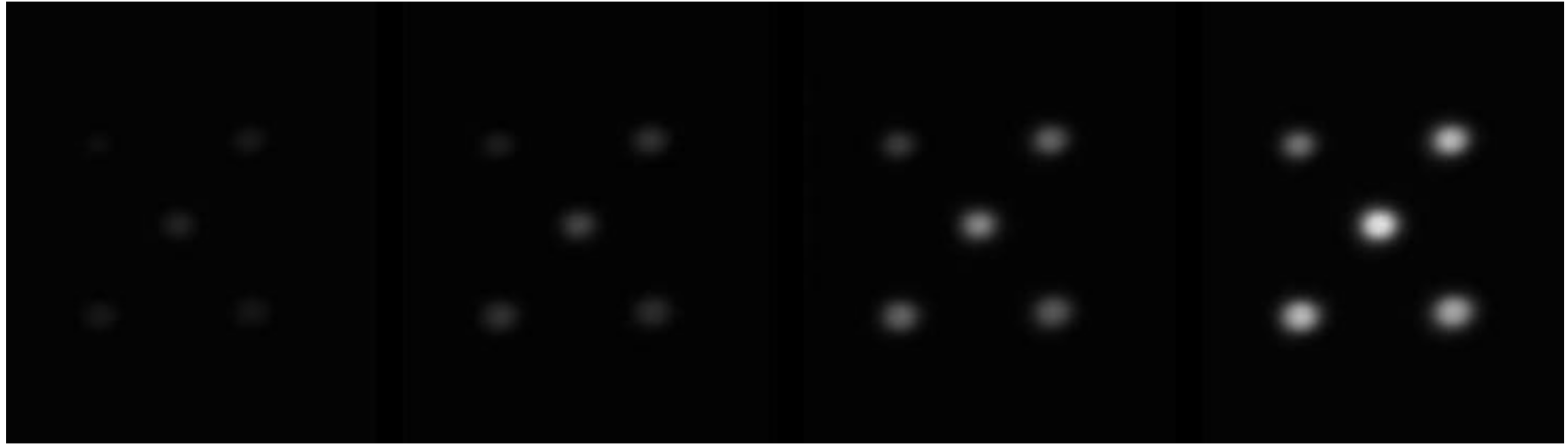
2.2.1. Noise Correction
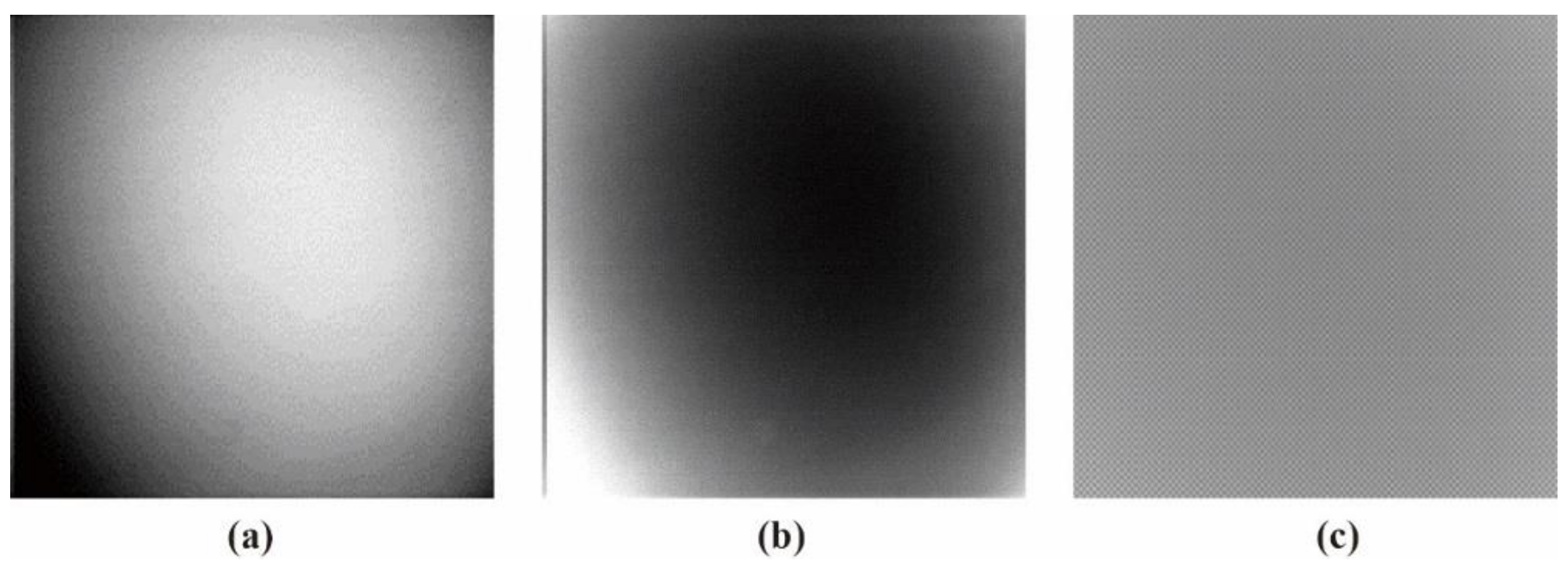
2.2.2. Vignetting Correction
2.2.3. Lens Distortion Correction
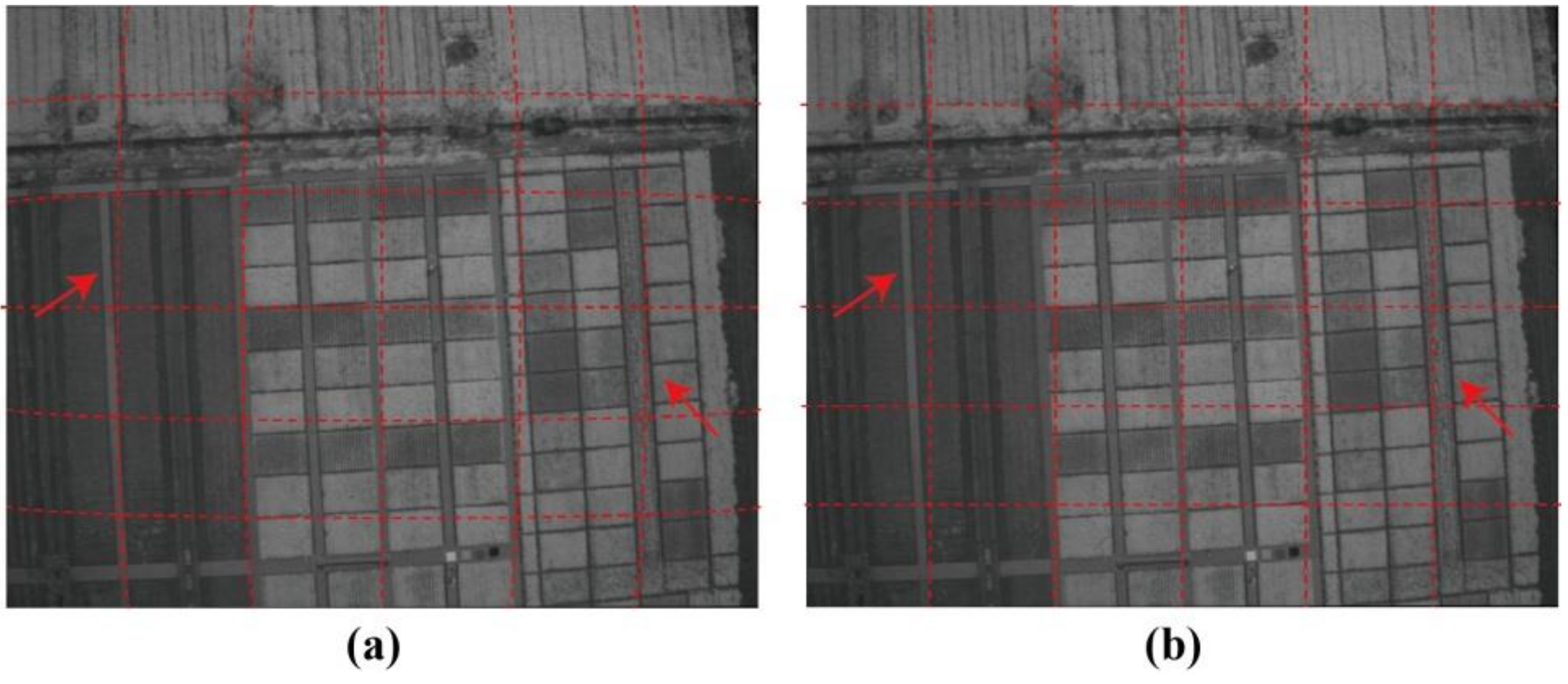
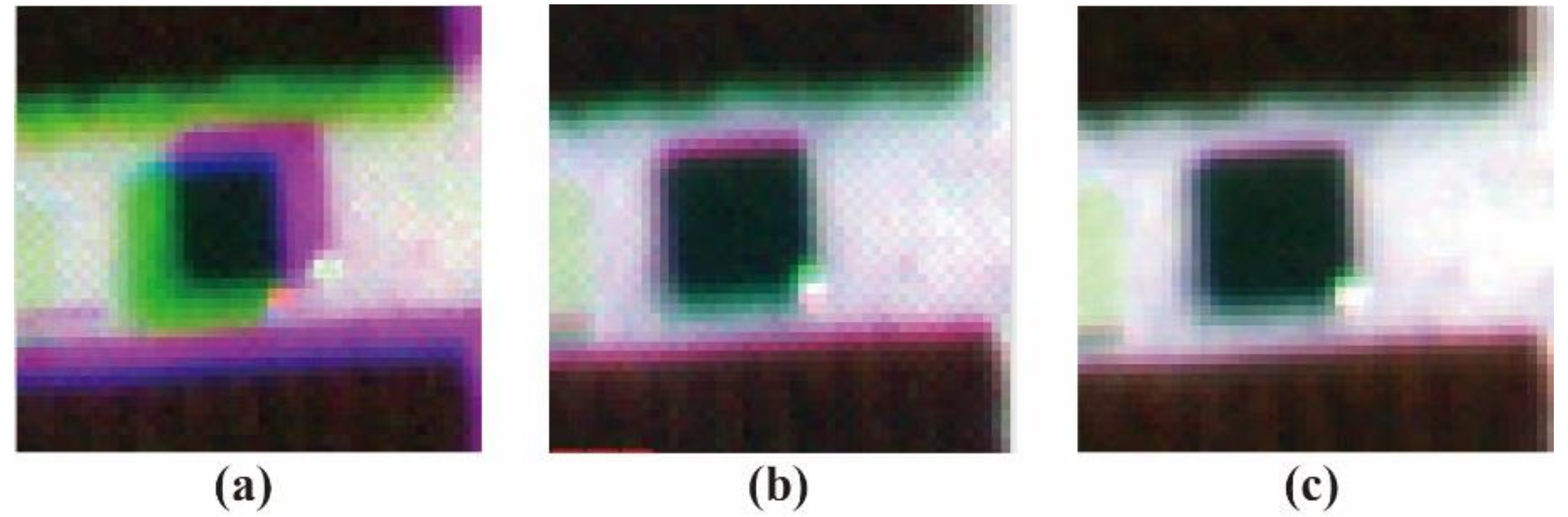
2.2.4. Band Registration
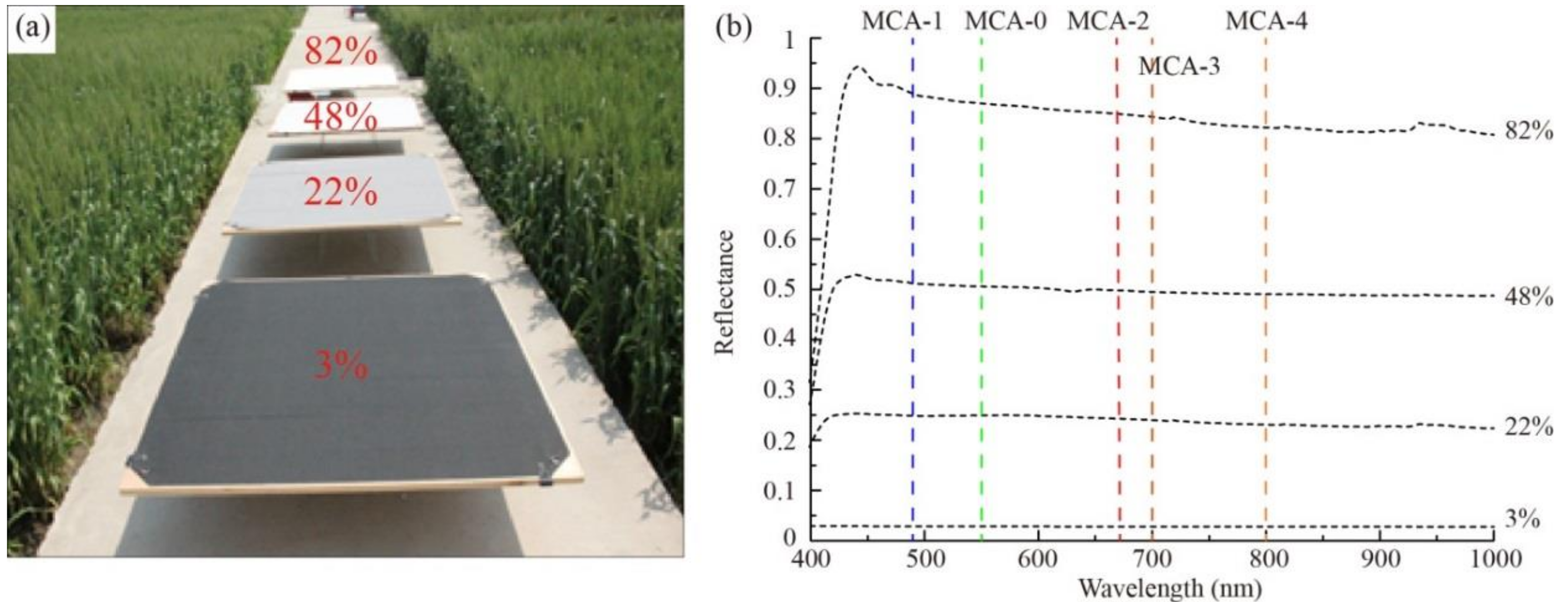
2.2.5. Radiometric Correction
2.3. Winter Wheat Case Study
3. Results
3.1. Sensor Error Analysis
3.1.1. Noise Correction Factor for Each Band
3.1.2. Vignetting Correction for Each Band
3.1.3. Brown Model for Lens Distortion Correction
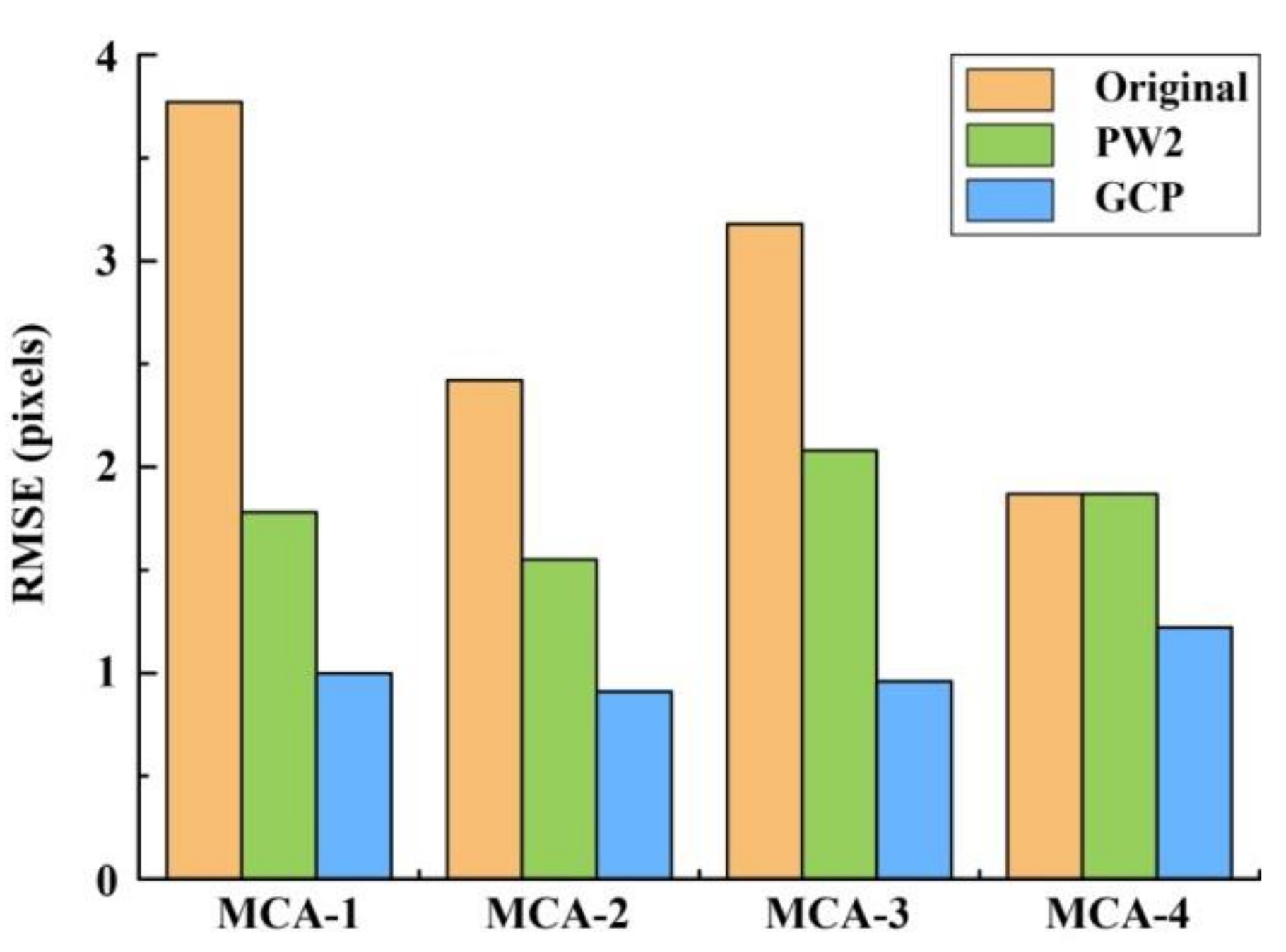
3.2. Comparison of PW2-Based and GCP-Based Methods for Band Registration
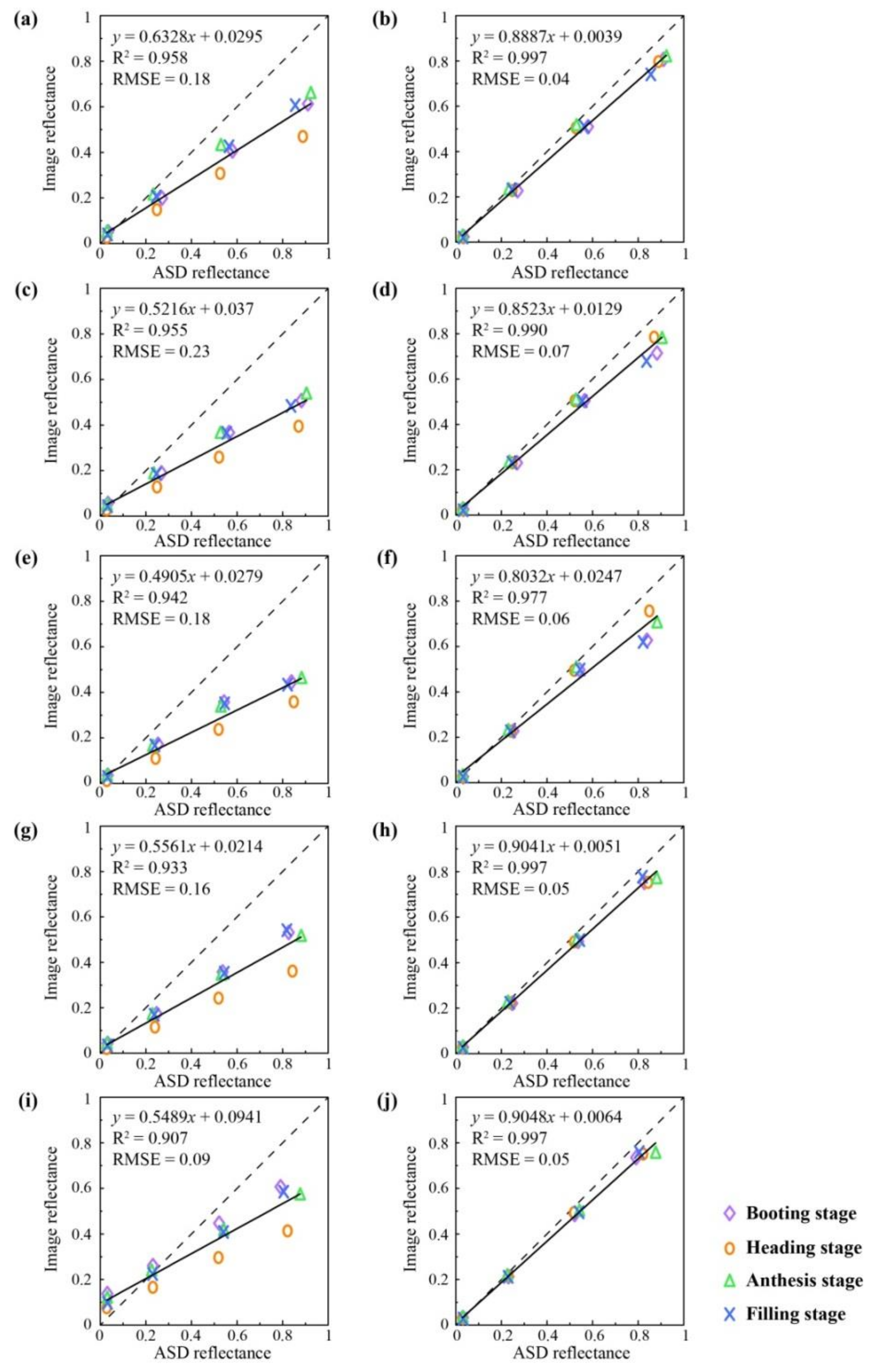
3.3. Comparison of the ILSC and ELC Methods for Radiometric Correction
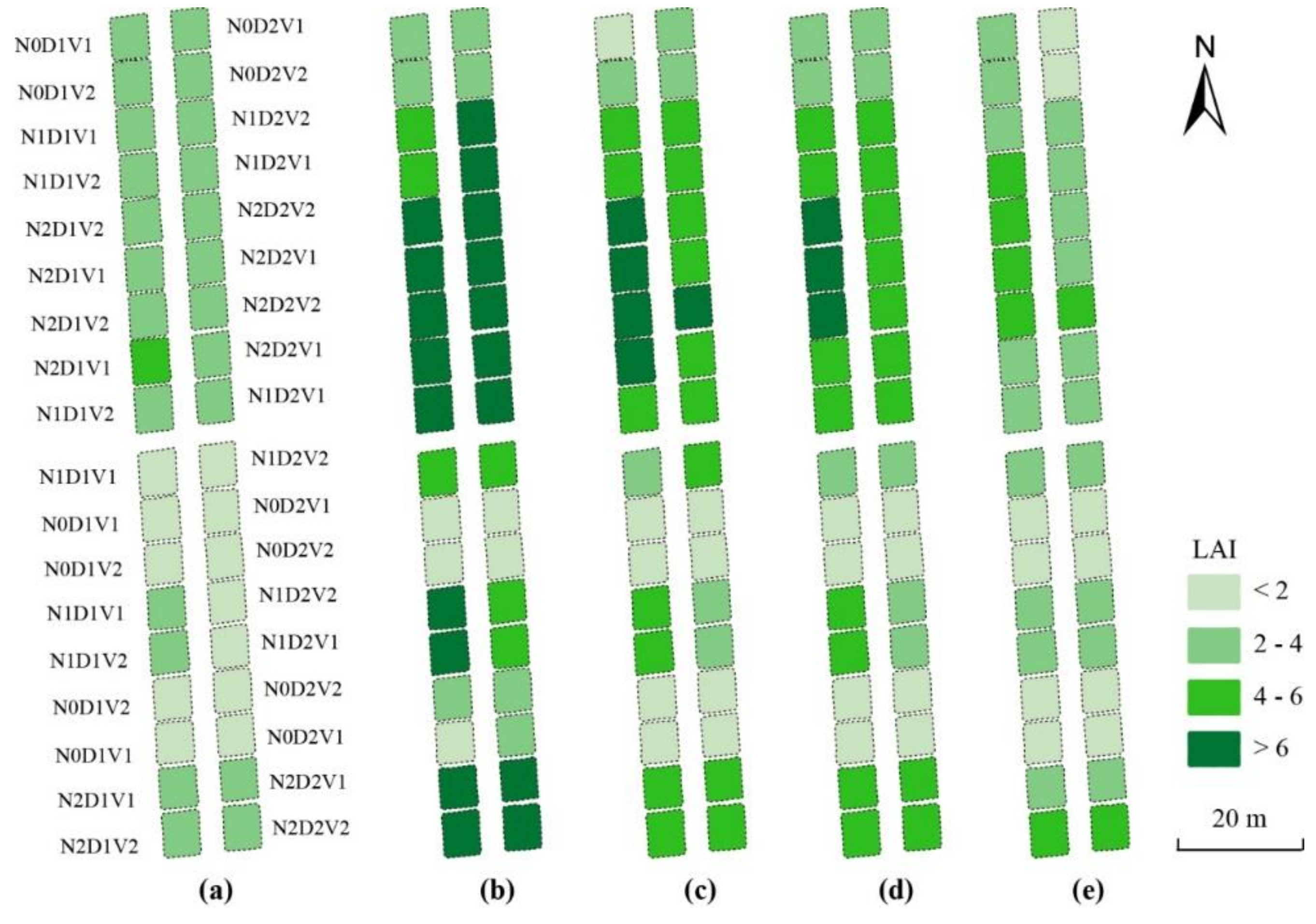
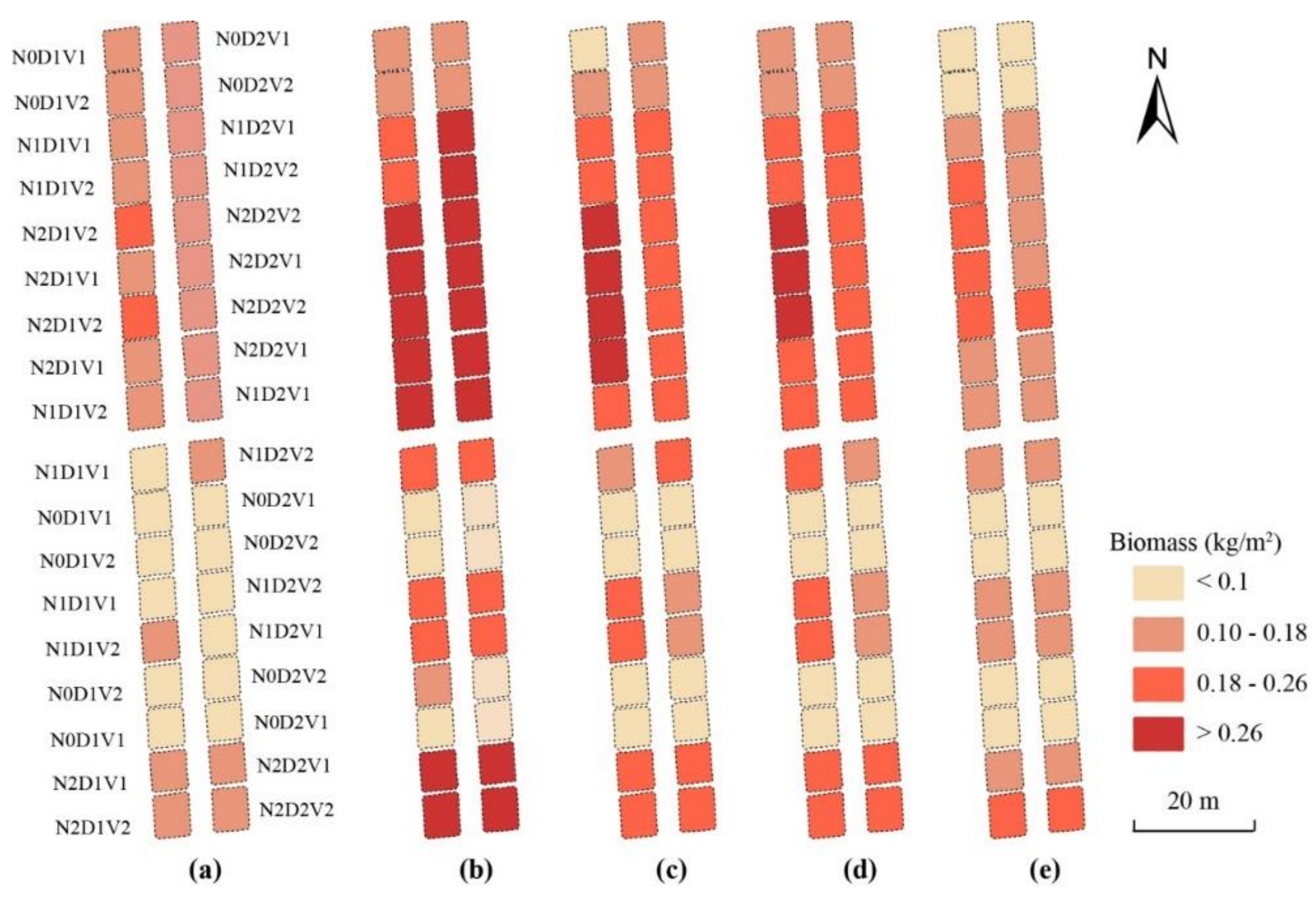
3.4. Estimation of LAI and Leaf Biomass
4. Discussion
4.1. Correction of Noise, Vignetting, and Lens Distortion
4.2. Selection of Appropriate Methods for Spectral Band Registration and Radiometric Correction
4.3. Application of Image Preprocessing in Crop Monitoring
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Banu, S. Precision agriculture: Tomorrow’s technology for today’s farmer. J. Food Preprocess. Technol. 2015, 6. [Google Scholar] [CrossRef]
- Zhang, Y.; Su, Z.; Shen, W.; Jia, R.; Luan, J. Remote monitoring of heading rice growing and nitrogen content based on UAV Images. Int. J. Smart Home 2016, 10, 103–114. [Google Scholar] [CrossRef]
- Von Bueren, S.; Burkart, A.; Hueni, A.; Rascher, U.; Tuohy, M.; Yule, I. Comparative validation of UAV based sensors for the use in vegetation monitoring. Biogeosci. Discuss. 2014, 11, 3837–3864. [Google Scholar] [CrossRef]
- Lu, D.; Chen, Q.; Wang, G.; Moran, E.; Batistella, M.; Zhang, M.; Vaglio Laurin, G.; Saah, D. Aboveground forest biomass estimation with Landsat and LiDAR data and uncertainty analysis of the estimates. Int. J. For. Res. 2012, 2012, 436537. [Google Scholar] [CrossRef]
- Calderón, R.; Navas-Cortés, J.A.; Lucena, C.; Zarco-Tejada, P.J. High-resolution airborne hyperspectral and thermal imagery for early detection of Verticillium wilt of olive using fluorescence, temperature and narrow-band spectral indices. Remote Sens. Environ. 2013, 139, 231–245. [Google Scholar] [CrossRef]
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: Current status and perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef] [PubMed]
- Baresel, J.P.; Rischbeck, P.; Hu, Y.; Kipp, S.; Hu, Y.; Barmeier, G.; Mistele, B.; Schmidhalter, U. Use of a digital camera as alternative method for non-destructive detection of the leaf chlorophyll content and the nitrogen nutrition status in wheat. Comput. Electron. Agric. 2017, 140, 25–33. [Google Scholar] [CrossRef]
- Liu, S.; Li, L.; Gao, W.; Zhang, Y.; Liu, Y.; Wang, S.; Lu, J. Diagnosis of nitrogen status in winter oilseed rape (Brassica napus L.) using in-situ hyperspectral data and unmanned aerial vehicle (UAV) multispectral images. Comput. Electron. Agric. 2018, 151, 185–195. [Google Scholar] [CrossRef]
- Liang, L.; Di, L.; Zhang, L.; Deng, M.; Qin, Z.; Zhao, S.; Lin, H. Estimation of crop LAI using hyperspectral vegetation indices and a hybrid inversion method. Remote Sens. Environ. 2015, 165, 123–134. [Google Scholar] [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. Remote Sens. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Zheng, H.; Cheng, T.; Li, D.; Zhou, X.; Yao, X.; Tian, Y.; Cao, W.; Zhu, Y. Evaluation of RGB, color-infrared and multispectral images acquired from unmanned aerial systems for the estimation of nitrogen accumulation in rice. Remote Sens. 2018, 10, 824. [Google Scholar] [CrossRef]
- Zheng, H.; Li, W.; Jiang, J.; Liu, Y.; Tao, C.; Tian, Y.; Zhu, Y.; Cao, W.; Zhang, Y.; Yao, X. A comparative assessment of different modeling algorithms for estimating leaf nitrogen content in winter wheat using multispectral images from an unmanned aerial vehicle. Remote Sens. 2018, 12, 2026. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; De Giglio, M.; Dubbini, M.; Gattelli, M. Evaluating multispectral images and vegetation indices for precision farming applications from UAV images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Goforth, M.A.; Steele, C.M.; Rango, A. Multispectral remote sensing from unmanned aircraft: Image preprocessing workflows and applications for rangeland environments. Remote Sens. 2011, 3, 2529. [Google Scholar] [CrossRef]
- Kelcey, J.; Lucieer, A. Sensor correction of a 6-band multispectral imaging sensor for UAV remote sensing. Remote Sens. 2012, 4, 1462–1493. [Google Scholar] [CrossRef]
- Salem Saleh Al-amri, N.V.K.; Khamitkar, S.D. A comparative study of noise removal from high resolution remote sensing images. Int. J. IT Eng. 2010, 7, 5. [Google Scholar]
- Zheng, Y.; Lin, S.; Kang, S.B. Single-image vignetting correction. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2243–2256. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.J.; Pollefeys, M. Robust radiometric calibration and vignetting correction. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 562–576. [Google Scholar] [CrossRef]
- Dan, B.G.; Chen, J.H. Vignette and exposure calibration and compensation. In Proceedings of the Tenth IEEE International Conference on Computer Vision, Beijing, China, 17–20 October 2005; Volume 891, pp. 899–906. [Google Scholar]
- Wang, A.; Qiu, T.; Shao, L. A simple method of radial distortion correction with centre of distortion estimation. J. Math. Imaging Vis. 2009, 35, 165–172. [Google Scholar] [CrossRef]
- Villiers, J.P.D. Modeling of radial asymmetry in lens distortion facilitated by modern optimization techniques. Proc. SPIE 2010, 7539, 75390–75398. [Google Scholar]
- Wang, J.; Shi, F.; Zhang, J.; Liu, Y. A new calibration model and method of camera lens distortion. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 5713–5718. [Google Scholar]
- Turner, D.; Lucieer, A.; Malenovský, Z.; King, D.; Robinson, S. Spatial co-registration of ultra-high resolution visible, multispectral and thermal images acquired with a micro-UAV over antarctic moss beds. Remote Sens. 2014, 6, 4003–4024. [Google Scholar] [CrossRef]
- Goforth, M.A. Sub-pixel registration assessment of multispectral imagery. Proc. SPIE 2006, 6302. [Google Scholar] [CrossRef]
- Radhadevi, P.V.; Solanki, S.S.; Jyothi, M.V.; Nagasubramanian, V.; Varadan, G. Automated co-registration of images from multiple bands of Liss-4 camera. ISPRS J. Photogramm. Remote Sens. 2009, 64, 17–26. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens. 2009, 47, 722–738. [Google Scholar] [CrossRef]
- Suárez, L.; Zarcotejada, P.J.; Gonzálezdugo, V.; Berni, J.A.J.; Sagardoy, R.; Morales, F.; Fereres, E. Detecting water stress effects on fruit quality in orchards with time-series PRI airborne imagery. Remote Sens. Environ. 2010, 114, 286–298. [Google Scholar] [CrossRef]
- Dinguirard, M.; Slater, P.N. Calibration of space-multispectral imaging sensors: A review. Remote Sens. Environ. 1999, 68, 194–205. [Google Scholar] [CrossRef]
- Jhan, J.-P.; Rau, J.-Y.; Huang, C.-Y. Band-to-band registration and ortho-rectification of multilens/multispectral imagery: A case study of MiniMCA-12 acquired by a fixed-wing UAS. ISPRS J. Photogramm. Remote Sens. 2016, 114, 66–77. [Google Scholar] [CrossRef]
- Del Pozo, S.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; Felipe-García, B. Vicarious radiometric calibration of a multispectral camera on board an unmanned aerial system. Remote Sens. 2014, 6, 1918–1937. [Google Scholar] [CrossRef]
- Yao, X.; Wang, N.; Liu, Y.; Cheng, T.; Tian, Y.; Chen, Q.; Zhu, Y. Estimation of wheat LAI at middle to high levels using unmanned aerial vehicle narrowband multispectral imagery. Remote Sens. 2017, 9, 1304. [Google Scholar] [CrossRef]
- Zheng, H.; Cheng, T.; Li, D.; Yao, X.; Tian, Y.; Cao, W.; Zhu, Y. Combining unmanned aerial vehicle (UAV)-based multispectral imagery and ground-based hyperspectral data for plant nitrogen concentration estimation in rice. Front. Plant Sci. 2018, 9. [Google Scholar] [CrossRef]
- Aldana-Jague, E.; Heckrath, G.; Macdonald, A.; Van Wesemael, B.; Van Oost, K. UAS-based soil carbon mapping using VIS-NIR (480–1000 nm) multi-spectral imaging: Potential and limitations. Geoderma 2016, 275, 55–66. [Google Scholar] [CrossRef]
- Jeong, S.; Ko, J.; Kim, M.; Kim, J. Construction of an unmanned aerial vehicle remote sensing system for crop monitoring. J. Appl. Remote Sens. 2016, 10, 026027. [Google Scholar] [CrossRef]
- Torressánchez, J.; Lópezgranados, F.; Castro, A.I.D. Configuration and specifications of an unmanned aerial vehicle (UAV) for early site specific weed management. PLoS ONE 2013, 8, e58210. [Google Scholar]
- Smith, G.; Milton, E. The use of the empirical line method to calibrate remotely sensed data to reflectance. Int. J. Remote Sens. 1999, 20, 2653–2662. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf-area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Rouse, J.W. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; NASA/GSFCT Type III Final Report; National Aeronautics and Space Administration (NASA): Washington, DC, USA, 1974. [Google Scholar]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Birth, G.S.; McVey, G.R. Measuring the color of growing turf with a reflectance spectrophotometer. Agron. J. 1968, 60, 640–643. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Pattey, E.; Zarco-Tejada, P.J.; Strachan, I.B. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture. Remote Sens. Environ. 2004, 90, 337–352. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Wang, F.M.; Huang, J.F.; Tang, Y.L.; Wang, X.Z. New vegetation index and its application in estimating leaf area index of rice. Rice Sci. 2007, 14, 195–203. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | Central Wavelength (nm) | Bandwidth (nm) | Exposure Proportion (%) |
|---|---|---|---|
| Master (MCA-0) | 550 | 10 | 70 |
| Slave 1 (MCA-1) | 490 | 10 | 120 |
| Slave 2 (MCA-2) | 671 | 10 | 100 |
| Slave 3 (MCA-3) | 700 | 10 | 100 |
| Slave 4 (MCA-4) | 800 | 10 | 80 |
| Incident light sensor (ILS) | 130 |
| Parameter | Value |
|---|---|
| Weight | 2050 g |
| Size | 73 (width) × 73 (length) × 36 (height) cm |
| Battery 4s/5000 | 520 g |
| Maximum payload | 2500 g |
| Flight duration | 8–41 min |
| Temperature range | −5–35 °C |
| Correction Coefficients | Channel 1 | Channel 2 | Channel 3 | Channel 4 | Channel 5 | |
|---|---|---|---|---|---|---|
| Main image point | x0 | 459.2210 | 457.1416 | 459.5102 | 458.7621 | 447.4720 |
| y0 | 553.2878 | 553.6993 | 553.4641 | 558.4854 | 554.4125 | |
| Radial distortion | k1 | 5.943 × 10−8 | 5.396 × 10−8 | 5.836 × 10−8 | 4.322 × 10−8 | 5.635 × 10−8 |
| k2 | −7.420 × 10−15 | 3.817 × 10−15 | 1.007 × 10−14 | 7.428 × 10−15 | 5.563 × 10−16 | |
| Decentering distortion | p1 | 9.080 × 10−6 | 9.836 × 10−6 | 9.064 × 10−6 | 1.015 × 10−5 | 9.353 × 10−6 |
| p2 | 3.876 × 10−7 | 2.110 × 10−7 | 5.372 × 10−7 | 1.763 × 10−8 | 1.307 × 10−7 | |
| Non-square scaling | α | 9.220 × 10−3 | 8.82 × 10−3 | 1.012 × 10−2 | 9.240 × 10−3 | 1.028 × 10−2 |
| Non-orthogonal distortion | β | 9.554 × 10−3 | 8.941 × 10−3 | 9.234 × 10−3 | 8.603 × 10−3 | 9.920 × 10−3 |
| Experiment | Experiment 1 | Experiment 2 |
|---|---|---|
| Year | 2013–2014 | 2014–2015 |
| Wheat cultivar | Ningmai 13, Xumai 30 | Shengxuan 6, Yangmai 18 |
| Row spacing (cm) | 25 | 25, 40 |
| N application rates (kg/ha) | 0, 75, 150, 225, 300 | 0, 150, 300 |
| Sampling dates | April 9/15/23, 2014 May 6, 2014 | March 13, 2015 April 9/17/24, 2015 May 9, 2015 |
| VIs1 | Algorithm | Reference |
|---|---|---|
| DVI | R800 – R700 | [37] |
| NDVI | (R800 – R700)/(R800 + R700) | [38] |
| GNDVI | (R800 – R550)/(R800 + R550) | [39] |
| RVI | R800 / R700 | [40] |
| SAVI | 1.5 × (R800 – R700)/(R800 + R700 + 0.5) | [41] |
| MTVI2 | 1.5 × (1.2 × (R800 – R550) – 2.5 × (R700 – R550))/(2 × (R800 + 1)2 – (6 × R800 – 5 × R700)0.5 – 0.5)0.5 | [42] |
| EVI | 2.5 × (R800 – R700)/(1 + R800 + 6 × R700 – 7.5 × R490) | [43] |
| GBNDVI | (R800 – (R550 + R490))/(R800 + R550 + R490) | [44] |
| Band | Exposure Time | |||
|---|---|---|---|---|
| 1.0 ms | 1.5 ms | 2.0 ms | ||
| MCA-0 (550 nm) |  |  |  | |
| MCA-1 (490 nm) |  |  |  | |
| MCA-2 (671 nm) |  |  |  | |
| MCA-3 (700 nm) |  |  |  | |
| MCA-4 (800 nm) |  |  |  |  |
| Band | Exposure Time | VC with the Column Number for the Middle Row 1 | ||
|---|---|---|---|---|
| 1.0 ms | 1.5 ms | 2.0 ms | ||
| MCA-0 (550 nm) |  |  |  |  |
| MCA-1 (490 nm) |  |  |  |  |
| MCA-2 (671 nm) |  |  |  |  |
| MCA-3 (700 nm) |  |  |  |  |
| MCA-4 (800 nm) |  |  |  |  |
| VIs | LAI | Leaf Biomass | ||||
|---|---|---|---|---|---|---|
| Equation | R2 | RMSE | Equation | R2 | RMSE | |
| DVI | y = 0.4862e5.6717x | 0.808 | 1.131 | y = 0.029e4.8811x | 0.757 | 0.050 |
| NDVI | y = 0.0818e4.9699x | 0.790 | 1.086 | y = 0.0062e4.2863x | 0.744 | 0.045 |
| GNDVI | y = 0.0248e6.3034x | 0.778 | 1.195 | y = 0.0021e5.4789x | 0.744 | 0.048 |
| RVI | y = 0.707e0.1917x | 0.833 | 1.130 | y = 0.0393e0.1671x | 0.801 | 0.044 |
| SAVI | y = 0.1188e5.3964x | 0.839 | 0.955 | y = 0.0086e4.6535x | 0.790 | 0.044 |
| MTVI2 | y = 0.5147e3.837x | 0.855 | 0.870 | y = 0.0303e3.3102x | 0.806 | 0.041 |
| EVI | y = 0.2409e3.8655x | 0.783 | 1.127 | y = 0.0159e3.3185x | 0.731 | 0.050 |
| GBNDVI | y = 0.1047e4.7458x | 0.765 | 1.294 | y = 0.0074e4.1367x | 0.736 | 0.051 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, J.; Zheng, H.; Ji, X.; Cheng, T.; Tian, Y.; Zhu, Y.; Cao, W.; Ehsani, R.; Yao, X. Analysis and Evaluation of the Image Preprocessing Process of a Six-Band Multispectral Camera Mounted on an Unmanned Aerial Vehicle for Winter Wheat Monitoring. Sensors 2019, 19, 747. https://0-doi-org.brum.beds.ac.uk/10.3390/s19030747
Jiang J, Zheng H, Ji X, Cheng T, Tian Y, Zhu Y, Cao W, Ehsani R, Yao X. Analysis and Evaluation of the Image Preprocessing Process of a Six-Band Multispectral Camera Mounted on an Unmanned Aerial Vehicle for Winter Wheat Monitoring. Sensors. 2019; 19(3):747. https://0-doi-org.brum.beds.ac.uk/10.3390/s19030747
Chicago/Turabian StyleJiang, Jiale, Hengbiao Zheng, Xusheng Ji, Tao Cheng, Yongchao Tian, Yan Zhu, Weixing Cao, Reza Ehsani, and Xia Yao. 2019. "Analysis and Evaluation of the Image Preprocessing Process of a Six-Band Multispectral Camera Mounted on an Unmanned Aerial Vehicle for Winter Wheat Monitoring" Sensors 19, no. 3: 747. https://0-doi-org.brum.beds.ac.uk/10.3390/s19030747