1. Introduction
The term Electronic-Textiles, or E-Textiles, refers to a wide range of studies and products that extend the usefulness and functionalities of common fabrics. The innovative feature taken by this novel application regards the embedding of digital components, such as batteries, LEDs, and, in general, electronic components, in common fabrics. Thus, through E-Textile technology, every kind of digital application can be potentially developed on a textile substrate. This attractive opportunity is bringing a revolution in the market of wearable devices, with the involvement of big companies which are trying to shift from the wearable electronic hardware to the more comfortable electronic textiles. The market of wearable technologies has a compound annual growth rate of 15.5%, with great opportunities of expansion, it is expected to reach 51.6 billion USD by 2022 (IDTechEx). E-textile is gradually covering this market, offering cheap and comfortable solution in different sectors, such as fashion, entertainment, military and defense, space exploration, health, and wellness.
Healthcare remains one of the most interesting and promising markets: e-textile features are very suitable for the development of innovative medical devices or applications that can potentially establish significant cost reductions for healthcare systems. Wearable devices for health monitoring can be easily used by patient in domestic environment and, when they are integrated in a complete communication chain, they allow smart remote monitoring with great benefits for caregivers and patient himself. E-textile sensitive fabrics can be developed to acquire and react to clinical signals detectable on body, with some interesting advantages: first, the nature of fabrics makes them the best solution to realize sensors in direct contact with the skin; second, fabrics are flexible and well adaptable to human body offering technological possibilities not available with the common electronics; and third, fabrics are cheap, comfortable, washable, and easily customizable [
1]. Thus, smart biomedical clothes potentially represent an innovative tool for the continuous monitoring of vital signs, combining the function of sophisticated medical devices with the comfort and ease of use of clothing products.
Moreover, the opportunity to integrate these innovative devices in IoT networks makes possible to establish smart solution for remote health monitoring, exploring the growing field of m-health and supporting cost reduction in healthcare system by facilitating early hospital discharges. Many E-Textile solutions for health monitoring have been proposed in literature, but most of them are blocked in the research field and are not intended to flow to the pragmatic healthcare world. Regulatory issues regarding patient safety, privacy, data management [
2,
3], and the need of a safe degree of reliability for device performances represent the main obstacles to the large commercial diffusion of such types of devices.
This manuscript presents a prototypical system, based on an e-textile sensing sock, able to collect the angular velocities of lower limbs, using Inertial Measurement Units (IMUs), and the plantar pressures, by means of textile sensors. Our aim is to provide a wearable and portable system for the assessment of both postural and gait tasks, exploiting the recent advances in the field of e-textile, electronic and signal processing. In particular the system is intended to provide the assessment of spatio-temporal gait parameters by processing the angular velocities signals while the pressure signals will be used to assess Center of Pressure (COP) displacements during static postural tests.
Static posturography in clinical environment is usually achieved by means of commercial platform systems. These systems include a big number of sensors arranged in a matrix resulting in high spatial resolution and high accuracy [
4]. However, platform systems are expensive, not portable, and require a trained technician to be used. In-shoe systems can overcome the usability limitations of platforms, enabling measurements of plantar pressure distribution within a shoe, in indoor and outdoor environments. In [
5,
6,
7], three insoles with, respectively, 10, 4, and 3 sensors are used to measure the COP for the assessment of balance. All these applications are based on force sensing resistors (FSRs), whose hard structure can reduce the comfort for the user. Moreover, insoles create an additional layer inside the shoe, which can essentially change the distribution of plantar load of the foot compared to the natural in-shoe condition [
8]. Textile pressure sensors represent an attractive solution because they improve comfort for users and their thickness ensure no distortion of plantar pressure. Several experimental custom-made smart socks, with textile pressure sensors embedded, are described in literature. Most of them are developed for the assessment of spatio-temporal gait parameters [
9,
10,
11], while other solutions [
8,
12] provide for postural assessment in dynamic tasks. Nevertheless, the latter offers only a qualitative representation of pressures distribution during walking tasks. Unlike these, the proposed system uses the textile pressure sensors not for gait analysis nor for dynamic postural assessment, but pressure signals are considered and processed to provide quantitative estimation and analysis of COP displacement during static tasks.
Regarding gait assessment, we decided to exclusively exploit kinematic data collected from IMUs because plantar pressure signals would not provide significant support for the estimation of spatio-temporal parameters. IMUs are nowadays broadly used in biomedical field. These devices are light, small, and can be easily integrated in electronic circuits, so they are very suitable for wearable application. Different kinds of IMU-based medical applications are available in literature, from the activity classification [
13,
14,
15,
16,
17,
18] to the balance assessment [
19,
20], but gait analysis is the most explored [
21,
22]. IMUs overcome the limitations of laboratory measurements enabling the assessment of spatio-temporal gait parameters in indoor and outdoor environments. Moreover, IMUs are cheaper and more practical than full gait analysis systems, thus broadening the range of its potential users. As reported in [
23], gait analysis is typically gained using the accelerometer, while the gyroscope is arguably the next most commonly used sensor. The different gait phases can be detected from angular velocities, measured by gyroscopes attached to lower limbs [
24]. Accelerometers by themselves can measure angular rotation but they cannot give a good result as gyroscopes. Thus, gyroscopes are often used in fusion with accelerometer readings [
25,
26,
27], when deployed together such as in an IMU, or alone [
28,
29,
30,
31] in the assessment of gait parameters.
There is a variety of commercially available IMU-based systems for gait analysis that are currently used in clinical environment, such as Opal by APDM or G-Sensor by BTS. They are wearable and portable systems, but they are expensive and require the presence of a technician to place sensors and carry out the acquisition using the computer software. Therefore, they cannot be used in domestic environment nor without the supervision of an expert. In contrast, our system is intended to be used in real-life conditions without any aid, as it only requires to wear socks and follow the easy steps guided by a mobile application that can be installed on the patient’s smartphone.
In this manuscript, we describe the details of prototype design and development. We also provide a validation analysis of the system concerning the assessment of spatio-temporal gait parameters deriving from IMU signals digital processing. This analysis has been obtained by performing comparative assessments with a stereophotogrammetry system for gait analysis, used in clinical environment and considered to be the gold standard in this kind of assessment.
3. Results
We approached the analysis of agreement between the two methods of measurement performing a paired
t-test on all the parameters considered for the analysis. For each parameter, the values deriving from all the trials performed were considered, with no separation between subjects or walking speeds adopted.
Table 3 shows mean and standard deviation values of each analyzed parameter dataset for each system of measure. The results of the two tailed paired
t-test, with a confidence interval of 95%, are reported using a symbol in accordance with the following convention: ns
p-value > 0.05, *
p-value < 0.05, **
p-value < 0.01, ***
p-value < 0.001, ****
p-value < 0.0001. The hypothesis of no difference between systems was tested, so lower
p-values suggest rejecting the accordance of systems. In the same table Pearson’s r values are reported.
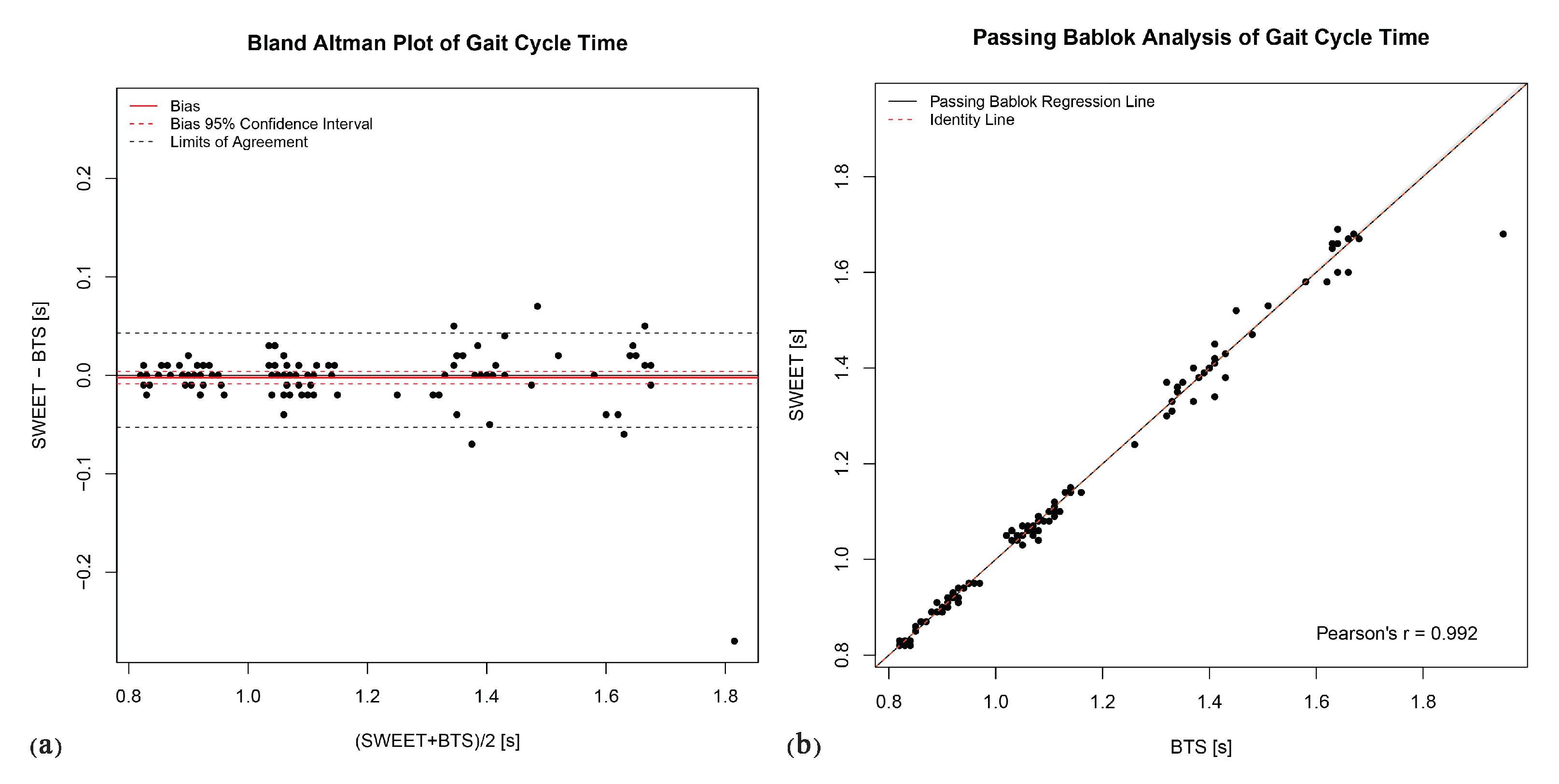
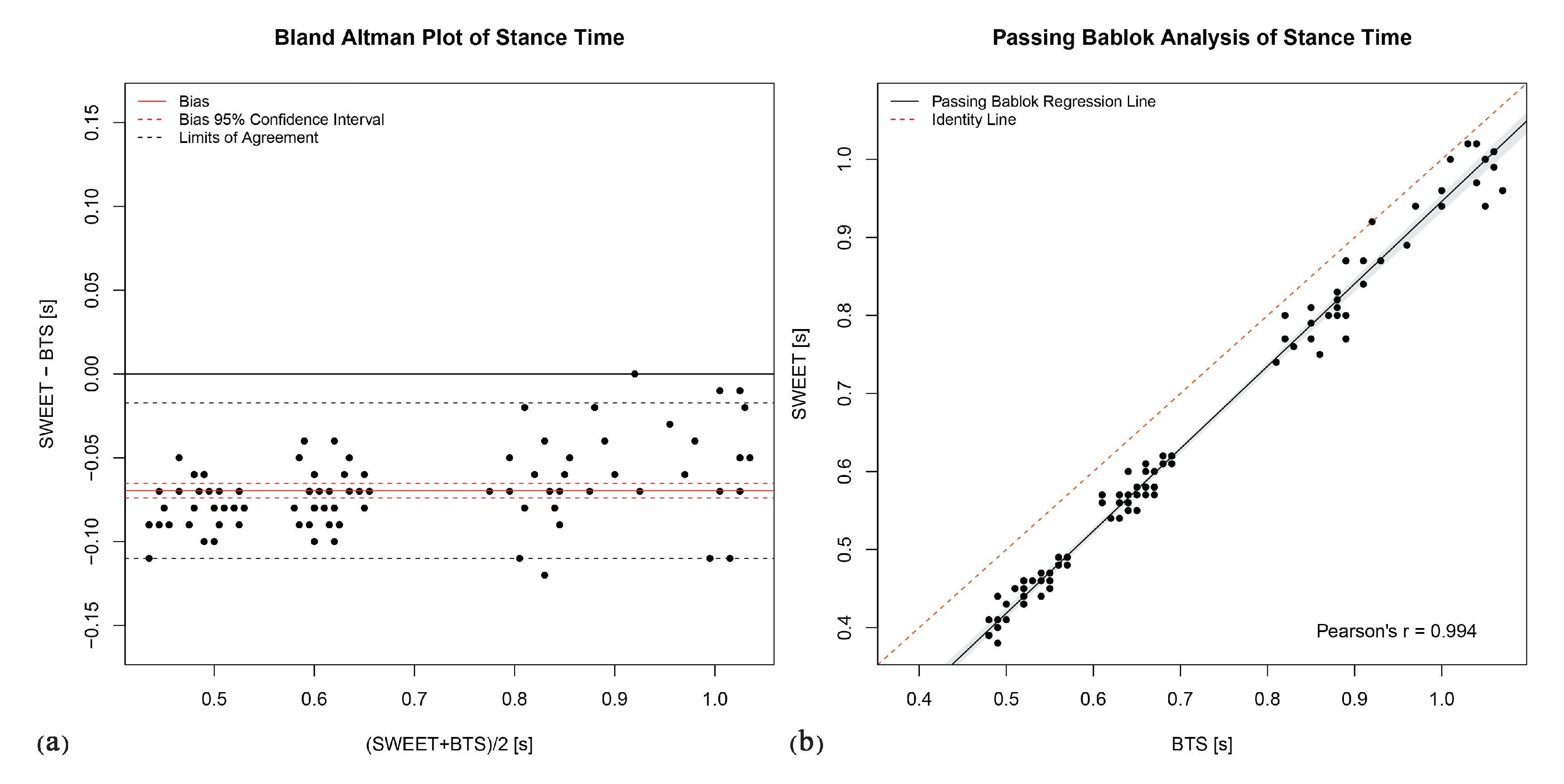
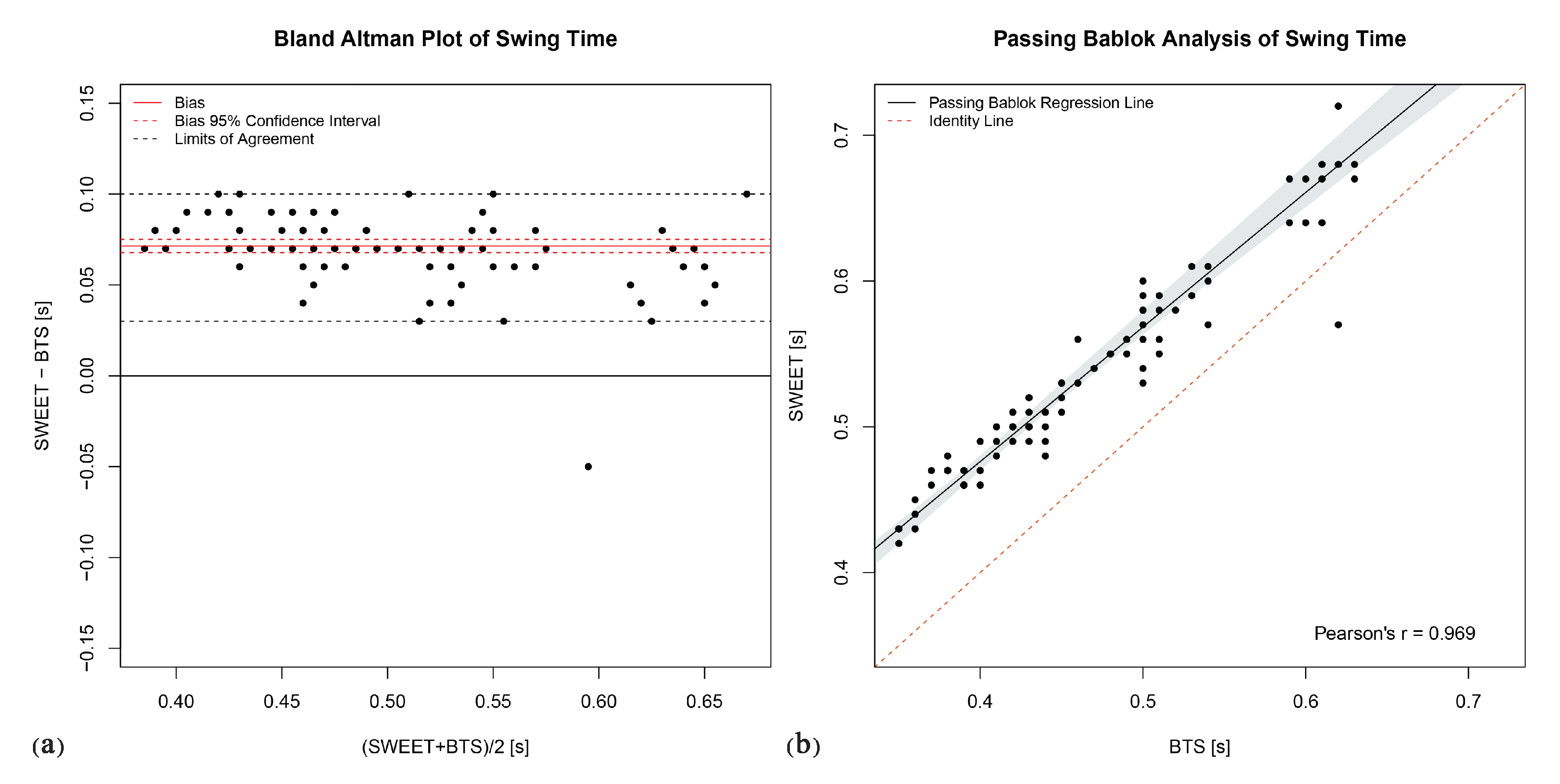
The Bland–Altman analysis produces the plots shown in
Figure 6a,
Figure 7a,
Figure 8a,
Figure 9a and
Figure 10a. They provide a qualitative assessment of the distribution of the differences between methods. The descriptive numeric values deriving from the analysis are reported in
Table 4. The bias represents the mean of the differences between the measures computed by the systems, it is provided with the limits of its 95% CI. In the plots, biases are reported as continue red lines, while the red dashed lines represent the corresponding confidence intervals. The LoA reported in table are also shown in the graphical representations as black dashed lines. They are assessed as the 2.5 and 97.5 percentiles of differences, as they do not have a symmetric gaussian distribution.
The last analysis on data was performed using Passing–Bablok regression. In addition to the previous analyses, this analysis can reveal the presence of a trend between the measures of the two systems, thus indicating a proportional error in the tested method according to the slope of the fitting regression line.
Figure 6b,
Figure 7b,
Figure 8b,
Figure 9b and
Figure 10b show the scatter plot of the dataset for each parameter, with the Passing–Bablok regression line in black. The shaded area around the regression line represents its CI, while the red dashed line corresponds to the reference identity line, to which the regression line should be tend in a scenario of perfect agreement. In the Passing–Bablok plots, Pearson’s correlation coefficient (r) is also shown because high values of r justify the choice to perform a linear regression analysis. The quantitative outcomes of Passing–Bablok analysis are reported in
Table 5: slope and intercept of the regression line are listed for each parameter, along with the corresponding 95% CI limits.
4. Discussion
This work aims to evaluate the agreement between a novel wearable and portable device for gait analysis and the gold standard of stereo-photogrammetry system. The comparative analysis has been performed on a selected group of the principal temporal and spatial parameters assessed in gait analysis by both systems. Three different statistical methods were used to properly characterize the relationship between the measurement systems under test: paired t-test, Bland–Altman plots, and Passing–Bablok regression analysis.
In the assessment of the mean gait cycle time, significant agreement has been pointed out by the statistical analysis. The paired
t-test leads to a non-significant
p-value (
p > 0.05), suggesting to accept the hypothesis of no difference between systems. The bias value in the Bland–Altman analysis is null (0.00 from
Table 4) and the LoA are very low (in the order of few hundredths of a second). The Pearson’s correlation coefficient is very high (0.992), supporting the concept of a linear dependence between the measures, explored by means of Passing–Bablok analysis. The regression line obtained with this method coincides with the identity line (slope = 1.00, intercept = 0.00), confirming the significant agreement between the two methods in assessing gait cycle time.
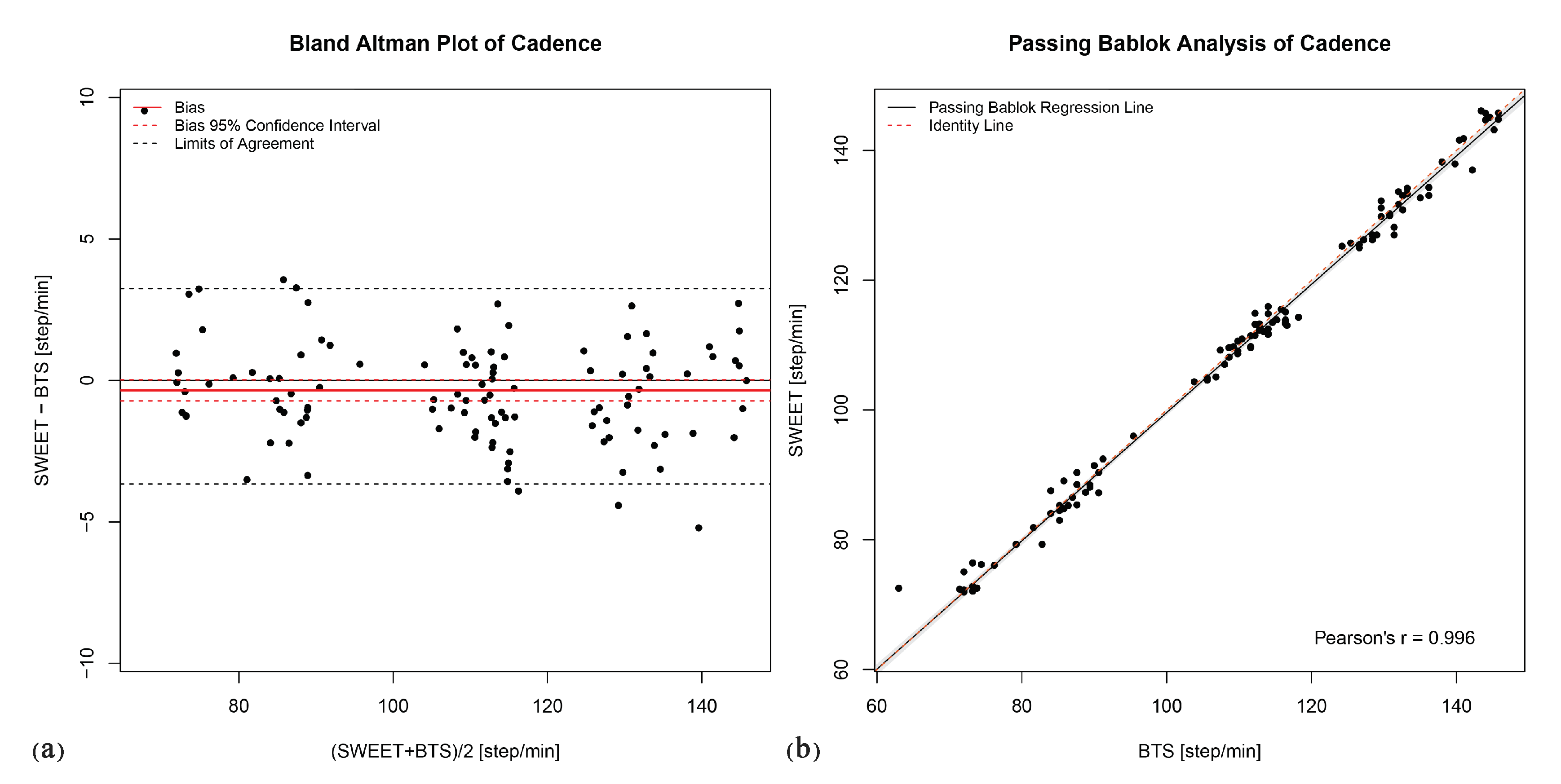
Concerning the measure of cadence, a deeper discussion is required. The
T-test result suggests to refuse the hypothesis of absence of difference between the methods, but with low significance (0.05 <
p-value < 0.01). The bias pointed out by Bland–Altman analysis is very low (−0.35, about 0.3% of the average value of cadence), with its 95% CI containing the zero value and limited to few units of steps per minute (−0.74 to 0.03). Passing–Bablok regression is legitimated by a high value of Pearson’s r (0.996): its slope is very close to 1 (0.99 with CI of 0.97–1.00), the intercept is different from 0 (0.74) but its CI contains this value (−0.95 to 2.38). Starting from these results and analyzing the Bland–Altman Plot in
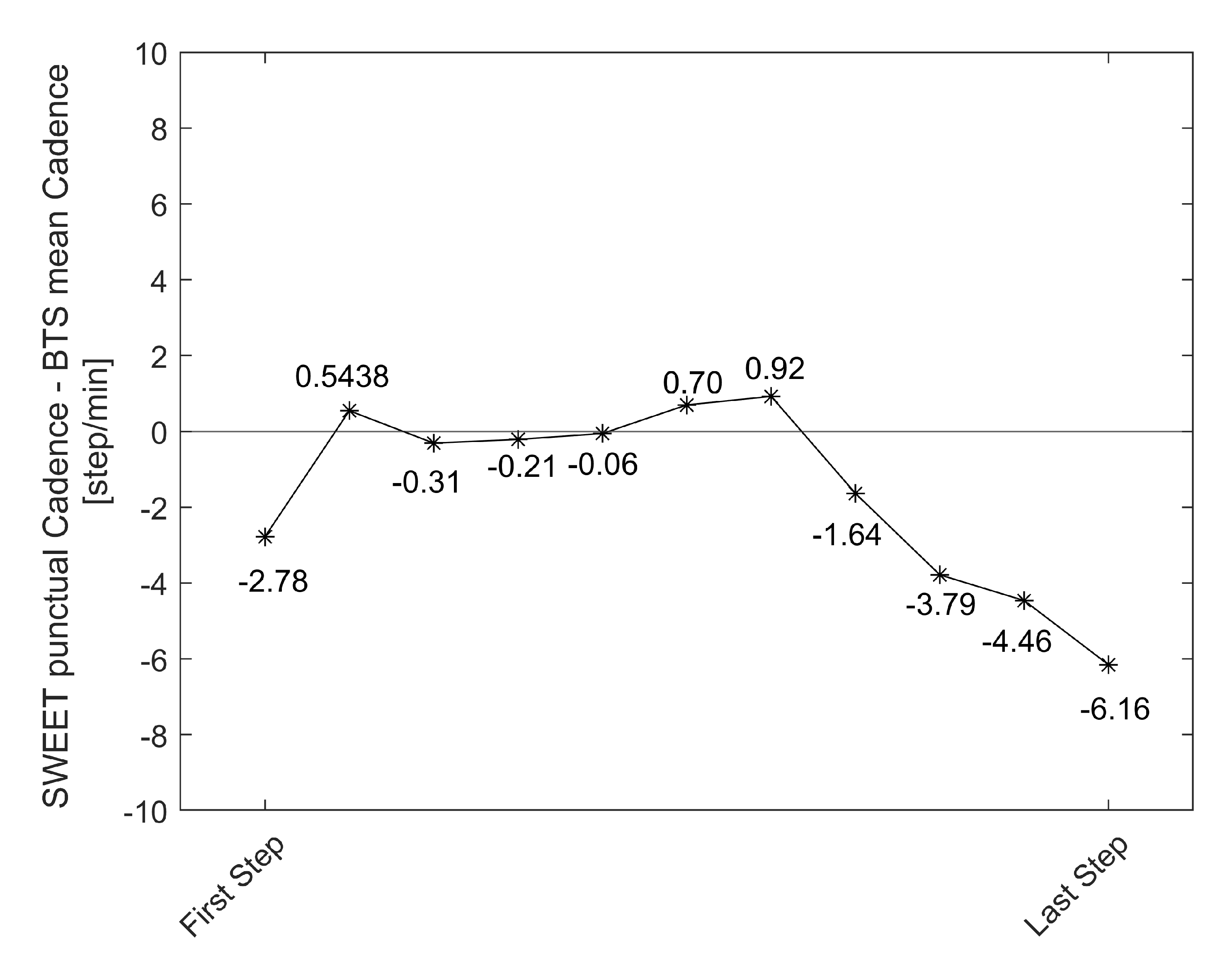
Figure 7a, we can observe that the SWEET system slightly underestimates the value of cadence compared to BTS system. Further exploring data, we identified the cause of the non-perfect agreement in the different range of steps analyzed by the two systems. The reference system SMART-DX 700 by BTS performs gait analysis on a limited range of steps, contained in the central 3 or 4 strides of the walking trial, as they are completely included in the field of view of the cameras. The detected volume cannot be extended because it is limited by the configuration of the system which considers the limited volume of the laboratory. Instead, SWEET Sock system elaborates the entire signal coming from the IMUs, removing only the first and the last steps performed to start and stop walking. The analysis of the punctual values of cadence assessed in each single step of the walking trial by SWEET Sock system clarify that in the first and last part of walking a lower step cadence is adopted.
Figure 11 shows, for each step of the walking trial, the average of the differences between the punctual cadence assessed by SWEET and the mean step cadence suggested by BTS system. We can observe that in the first and last part of walking the difference is higher in absolute value, while in the middle steps it is reduced. Therefore, we can affirm that probably a better agreement would have been obtained if the same range of steps were analyzed by the two systems. We have chosen not to do so for two reasons: the first is that in SMART-DX 700 the steps to be considered in the analysis have to be chosen manually, while the signal processing of SWEET Sock is entirely automatic, and second because we have chosen not to modify the methods of analysis of SWEET system, which can provide more accurate results by taking into account the entire walking trial.
Stance and swing phase durations are complementary parameters, because they are the two parts composing the gait cycle time. Gait cycle time is defined as the time between two successive initial contacts of the same foot. Stance phase duration is the time between the initial contact and the successive terminal contact of the same foot, while swing time goes from the terminal contact to the subsequent initial contact. The complementarity of these parameters is perfectly reflected in the results of the statistical analyses. The
T-test identified a significative statistical difference between the systems (
p-values < 0.0001), even if a linear correlation exists in both stance and swing phase durationsas shown by Pearson’s r values, respectively 0.994 and 0.969. The Bland–Altman plots clearly show that SWEET system underestimates Stance time compared to BTS system (bias = −0.07), and therefore overestimates of the same quantity the Swing time (bias = 0.07). Passing–Bablok results confirm the presence of a systematic error in the measures: intercepts’ CIs are symmetric for the two variables and do not contain zero value (stance Cis = −0.13 to −0.09, swing Cis = 0.10 to 0.13). It also points out a proportional error proven by the fact that the slopes of the two regression lines are different from 1 (the CIs are respectively from 1.03 to 1.08 and, symmetrically, from 0.87 to 0.94). Therefore, the difference between the methods of measures is made of a constant part and a proportional part which grows when the value of the parameter is increased. The error is to be probably addressed to the wrong detection of the initial and terminal contact of the foot with the ground, made by SWEET system through the analysis of the filtered gyroscope signal in accordance to the rules illustrated by Doheny et al. in [
36]. Although the gait cycle time shows very good agreement, it does not mean that the initial contacts are well identified in the signal, because they could be all translated in time of the same quantity, still resulting in good output values. To understand the error a further analysis is required on the mutual position of initial and terminal contacts identified on gyroscope signals.
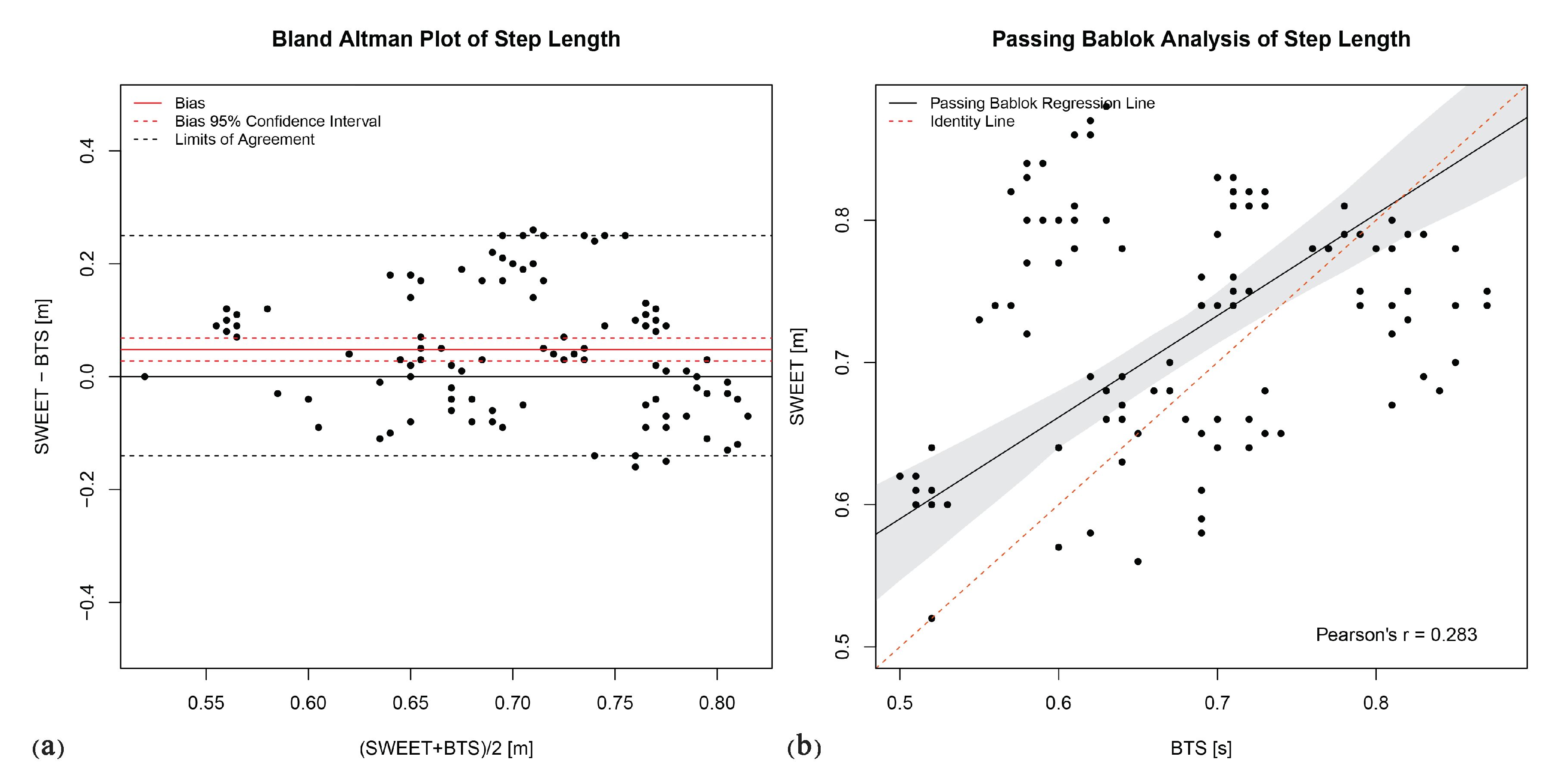
The last parameter is the step length, which has been selected to investigate the performances of SWEET system in the assessment of spatial measures. Results of the statistical analysis are not very encouraging.
T-test points out a significative statistical difference between the measures of the systems (
p < 0.0001), that is confirmed by Bland–Altman analysis. Actually, even if the CI of bias includes the zero, it is quite wide (−0.13 to 0.25 m) for the precision required in this spatial metric. Moreover, the reduced value of Pearson’s coefficient shows that no linear correlation exists between the measures (r = 0.283), so it does not make sense to perform the Passing–Bablok regression analysis. Actually Passing–Bablok regression line in
Figure 10b does not fit accurately the points, which are distributed with no detectable trend. These results allow to affirm that there is not agreement between the systems in the assessment of the step length. Moreover, in this case the cause of the error could be probably found in the processing of the gyroscope signal that lead to the assessment of the spatial parameters. The algorithm proposed in [
36] is based on modeling the movement of the shank as a single pendulum, thus deriving the spatial parameters from the calculation of the angle covered by the foot during the swing phase and using geometrical consideration. A further analysis is required to understand if this model is too simplistic to represent leg swing during gait or if other aspects (device positioning, signal filtering, etc.) cause errors in the measure of spatial parameters in SWEET Sock system. Our first purpose is to try maintaining a gyroscope-based algorithm for gait assessment, by considering other more specific models proposed in literature regarding the movement of the shank during the swing phase. An example is the double segment gait model involving both shank and thigh proposed by Aminian et al. in [
24]. Doing so we can avoid the use of other sensors data, such as linear accelerations, keeping the gyroscope advantages explored in the description of the electronic unit, and avoiding the reconfiguration of the entire system.
We explored scientific literature to find out and analyze other results from gait analysis systems based on similar measuring principles. Some works exist regarding validation analysis of wearable systems for gait analysis based on processing of kinematic signals. These studies address comparative analyses with clinical instruments, such as instrumented treadmill [
49], force platform [
50] or pressure sensitive walkway (GAITRite
) [
35,
51,
52]. No works presenting a comparative analysis with the gold standard (stereophotogrammetry system) has been found. Results from the analyzed works show a common trend: temporal parameters present a better agreement than spatial metrics. Among temporal parameters, step time and GCT show the best agreement, while stance and swing phases measurements are moderately correlated with reference measures. Results presented in this article are in accordance with this trend, confirming the poor performances of IMU-based systems in assessing gait spatial metrics. Only in [
35] spatial metrics show a good agreement level, that could be caused by the different placement of IMUs, placed on both feet rather than on shanks. Results from the works in [
35,
49] demonstrated that foot placement allow a better measurement of spatial gait parameters. However, we did not choose this placement because it can worsen the comfort and wearability of the system for users and preclude its in-shoes use.
Comfort Assessment
In addition to the validation of technical performance, the wearability and comfort assessment was carried out in order to evaluate the acceptance of the system by final users and to identify possible areas of improvement in terms of design. To carry out this conformity assessment, an already validated methodology was used, specifically the Comfort Rating Scales (CRSs).
The wearability evaluation of a device is a multidimensional analysis: wearable devices affect the wearer in different ways. Among the effects to be taken into consideration, there are those related to comfort. When wearing something, the level of comfort can be affected by several aspects, such as device size and weight, how it affects movement, and pain.
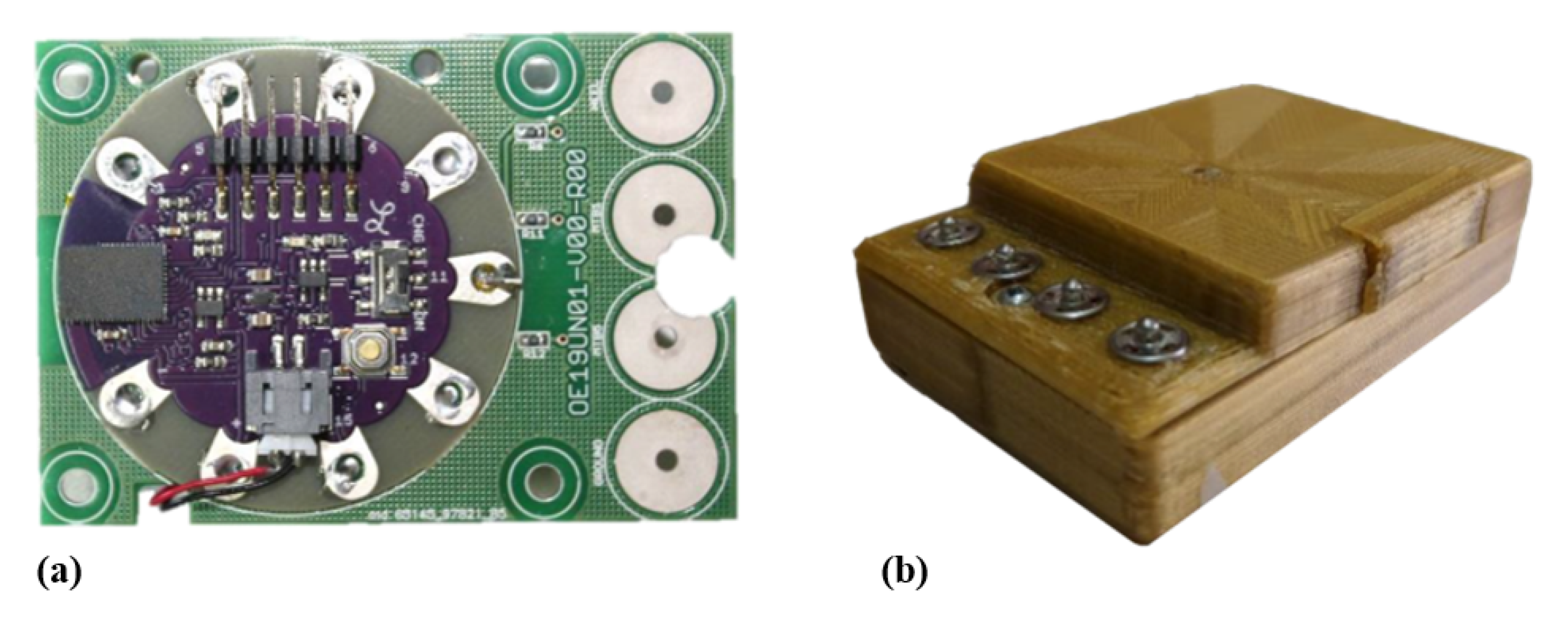
The design of the sock has been implemented in order to achieve the greatest comfort for the user. The integrated pressure sensors are made of textile material, therefore are flexible and imperceptible on the skin. The electronic unit has also been designed to be as comfortable as possible for the user: it is light and it can be connected to the textile sock without the need to use bands. In fact, the use of the latter could cause discomfort to the user due to the presence of a narrow element tied to the limb.
In addition to physical factors, comfort may be affected by psychological responses such as embarrassment or anxiety. Consequently, Knight and Baber proposed that comfort should be measured across a number of dimensions and for such task they developed the Comfort Rating Scales (CRSs) [
53].
The CRSs provide a quick and easy-to-use tool to assess the comfort of wearable devices, which attempt to gain a comprehensive assessment of the comfort status of the wearer of any item of technology by measuring comfort across the six dimensions described in
Table 6. In rating perceptions of comfort, the scorer simply marks on the scale his or her level of agreement, from low (0) to high (20), with the statements made in the “description” column of
Table 6. According to Knight and Baber, this range was considered large enough to elicit a range of responses that could be used for detailed analysis [
53].
The three participants involved in the study were invited to fill in the CRSs to provide a judgment on their comfort.
Table 6 shows the scores assigned, for each field, by the subjects involved in the study.
Although the evaluation was carried out on only three people, it provides a preliminary measure of the comfort of the prototype device. Knight et al. [
54] have proposed five Wearability Levels (WLs), determined by proportioning the scales into equal parts (
Table 7). The mean score of Emotion dimension is in the WL2 suggesting that users show little embarrassment in wearing the system. All the other dimensions were rated in the WL1 proving a high wearability and comfort of the device. However, to better identify the wearability level of the device and how to improve it, future analysis will aim to make a significant assessment of comfort, testing the device on a wider cohort of subjects.
5. Conclusions
SWEET Sock is a new wearable and portable device for the measurement and analysis of biosignals, based on textile sensors, able to perform posturographic assessment and gait analysis. In this manuscript, we presented the development of the system and we illustrated the validation analysis of the performances of the novel system in gait assessment.
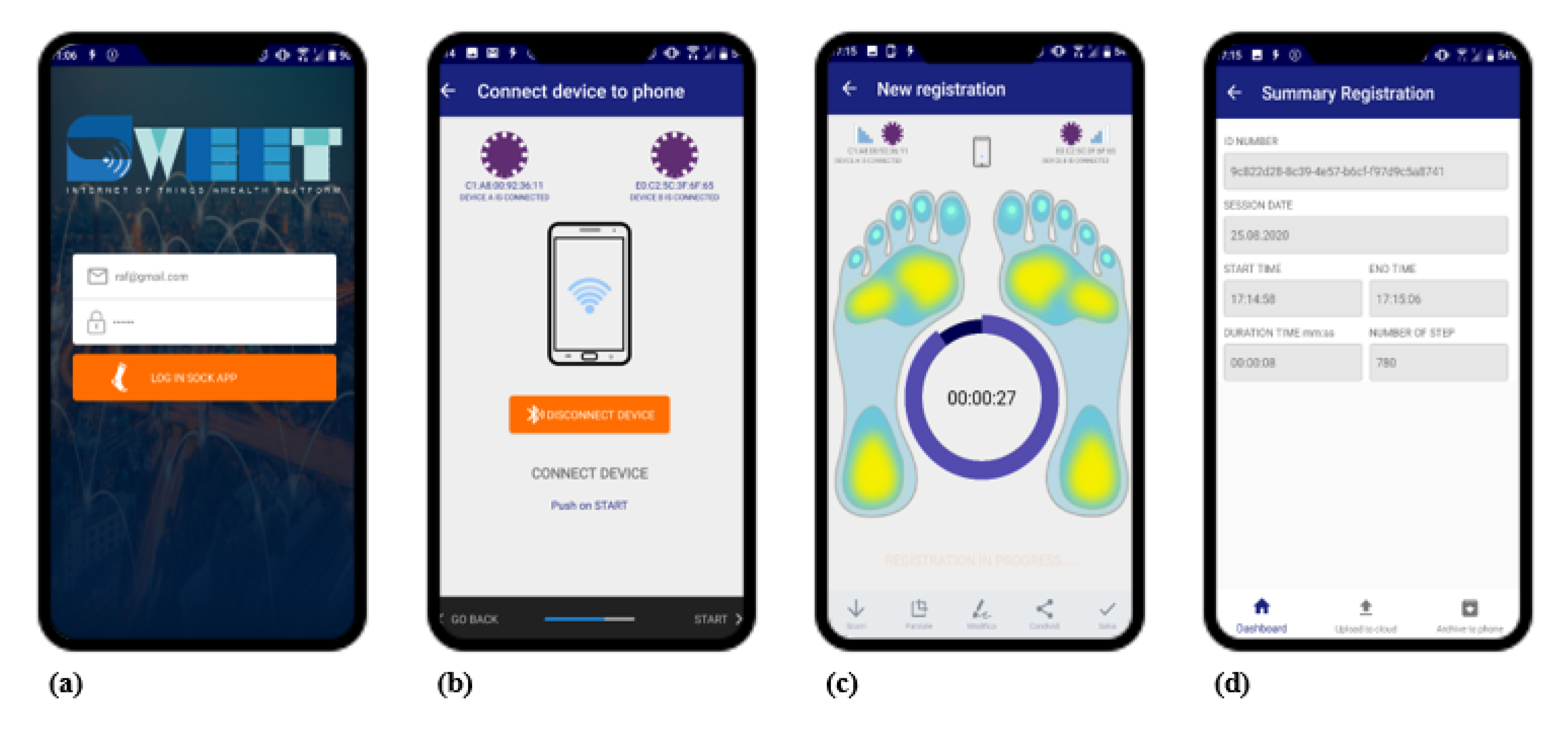
The sensing unit is a textile sock in which textile sensors and bus structures are integrated, making it possible to use the system during normal daily activities, without any discomfort. The system includes a mobile app for real time visualization of the acquired signals and a software desktop for off-line plotting and digital signal processing.
The analysis of the performances of the system in gait assessment was performed by comparing the results given by the novel system with the corresponding values computed by an optoelectronic stereophotogrammetric system (SMART-DX 700 by BTS Bioengineering) in the analysis of 108 walking trials at different walking speeds. Study results show that the agreement is not confirmed for all the spatio-temporal gait parameters analyzed. In particular, gait cycle time and cadence are the two parameters presenting the best agreement, even if the latter presents a small systematic difference between the values computed by the two systems. Stance and swing phase durations present both systematic and proportional errors in the comparison between the methods. Although both errors could be removed by taking into account this misalignment, a further analysis will be performed to understand and correct the problems directly in the processing phase. Worse results are achieved in the analysis of spatial parameters’ agreement. The measures of step length provided by the two systems are not correlated. For this parameter, a further analysis is required to correct the issues in the computational process. Based on these findings, we can affirm that the novel system can be safely used in the evaluation of gait cycle time while some issues were found in the validation of the other temporal and spatial parameters. Future developments will concern the resolution of the problems encountered in this work and the execution of a similar validation analysis regarding the posturographic assessment provided by the system.
The innovative features of the system rely in the multiparametric approach in health monitoring and in its ease of use. The “wearability” of the system and its comfortable use make it very suitable to be used in domestic environment for the continuous remote health monitoring of de-hospitalized patients. The CRSs were used to assess the comfort of the wearable system. The scores provided by the subjects involved in the study, allow to assume a good level of comfort when the socks are used.
Another valid field of interest regards occupational ergonomics, related to the prevention of work-related musculoskeletal disorders (WRMSDs) in healthcare workers.
The use of SWEET Sock during working hours by nurses and therapists could help monitor postural and dynamic variables in activities most associated with exposure to biomechanical overload (i.e., frequent patient handling, pushing and pulling, awkward postures, prolonged standing, and significant sideways twisting).
The biomechanical advantage of using patient handling devices and technological aids, including exoskeletons, could be verified through the analysis of postural parameters. Gait analysis could help rethink preventive strategies aimed at work organization (for example by providing for the alternation of dynamic and static phases, and adequate recovery breaks). Last, but not least, balance analysis and COP coordinates could provide insights into the prevention of slips, trips, and falls, which are the second most common cause of injuries leading to lost working days in hospitals. The advantages combined in a minimally invasive device, together with the accuracy and reliability of the measurement, and the future opportunity of integration into IoT networks open new perspectives to increase the effectiveness of prevention and safety strategies in healthcare workers.

 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}