
Wearable-Sensors-Based Platform for Gesture Recognition of Autism Spectrum Disorder Children Using Machine Learning Algorithms

 , , ,
, , ,
Abstract
:1. Introduction
- Constructing a wearable-sensors-based platform to acquire and recognize ASD children’s gestures.
- Extracting various features from the gestures data and comparing performance to select features for efficient recognition.
- Comparing performance using various machine learning algorithms to increase recognition accuracy.
- Since ASD is a special body condition, both medically and physically, we did not use the data of normal people to train the supervised machine learning algorithm for the gestures recognition of ASD. Instead, we collected a novel dataset of 24 physical activities from 10 children who had mild and moderate levels of ASD.
- We performed features extraction on the acquired data using various statistical measures from both the time and frequency domains.
- For gestures recognition on the novel dataset, we evaluated several classifiers and selected the one that produced the most accurate cumulative result.
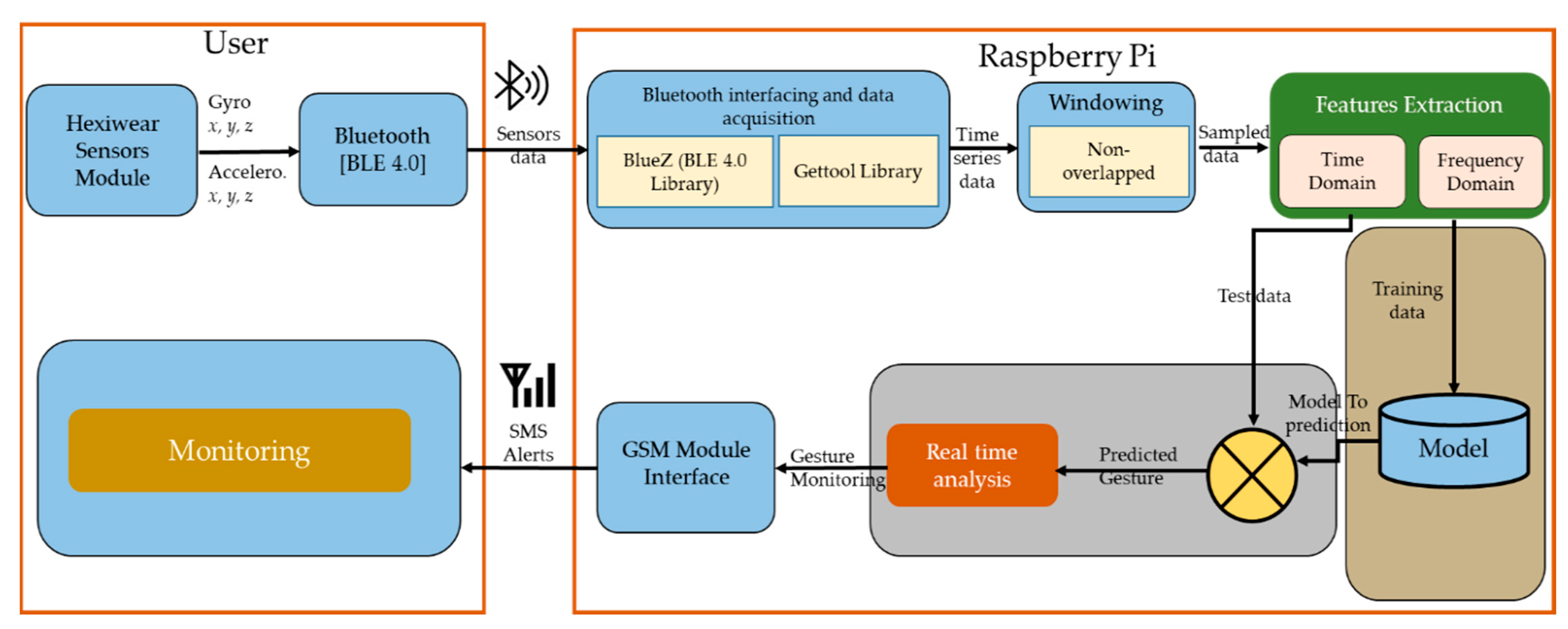
- We conducted Raspberry-PI-based real-time gesture monitoring of ASD to facilitate the communication between ASD and normal people.
2. Background and Related Work
3. Proposed Wearable-Sensors-Based Platform for Gesture Recognition of Autism Spectrum Disorder Children
3.1. Data Collection
3.2. Features Extraction and Selection
- Mean: We found the mean value for the accelerometer (x,y,z), and magnetometer (x,y,z).
- Standard Deviation: We calculated the spread in the sensors data around the mean as,
- Entropy: Entropy was used to differentiate between the gestures of a static nature, i.e., low movement, and activities having higher variation.
- Cross-correlation was used to help differentiate between activities with variation.where
- Zero-crossing (ZC): Zero-crossing is the number of times the signal crosses zero and its sign changes. We considered ZC for the accelerometer along three axes. Mathematically, it can be written as:
- Maximum Value: We calculated the maximum value of the accelerometer (x,y,z).
- Skewness: The coefficient of skewness is a measure of the degree of symmetry in the variable distribution. It was calculated for every axis of the accelerometer.
- Kurtosis: The coefficient of kurtosis is a measure of the degree of tail in the variable distribution.
- Fast Fourier Transform: Equation (9) was used to find the fast Fourier transform (FFT) of acceleration data. We considered six frequency domain features based on the FFT of the acceleration data. The six features were the FFT magnitude: peak_ f, low_ f 1, low_ f 2, low_ f 3, med_ f, and high_ f.
3.3. Classification Algorithms for the Proposed Work
3.3.1. The K-Nearest Neighbor Algorithm
3.3.2. The Decision Tree Algorithm
3.3.3. The Random Forest Algorithm
3.3.4. Back-Propagation-Based Neural Networks Algorithm
4. Simulation Results and Discussion
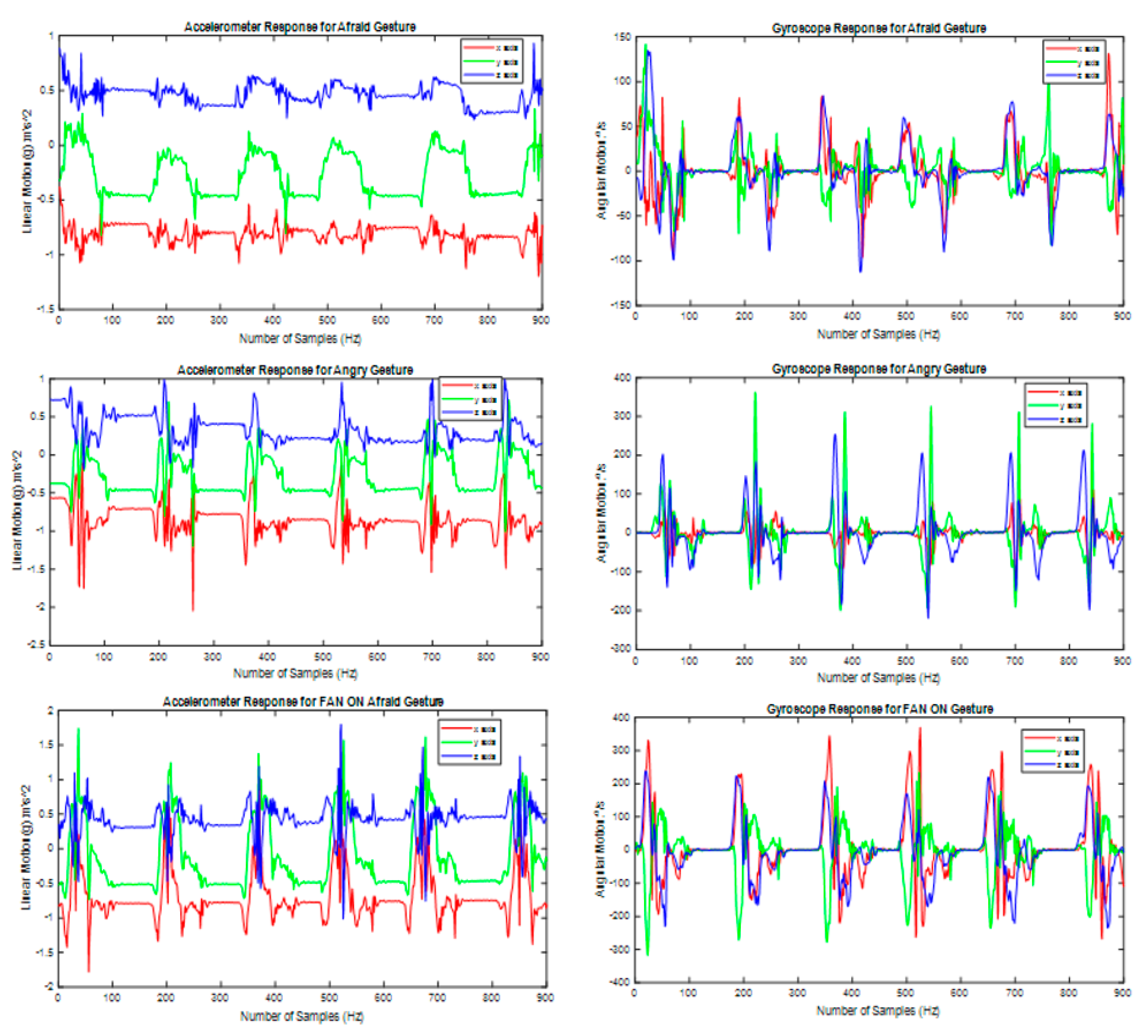
4.1. Sensors Response and Dataset Description
4.2. Individual Classifier Performance Comparison Using Data Cross-Validation
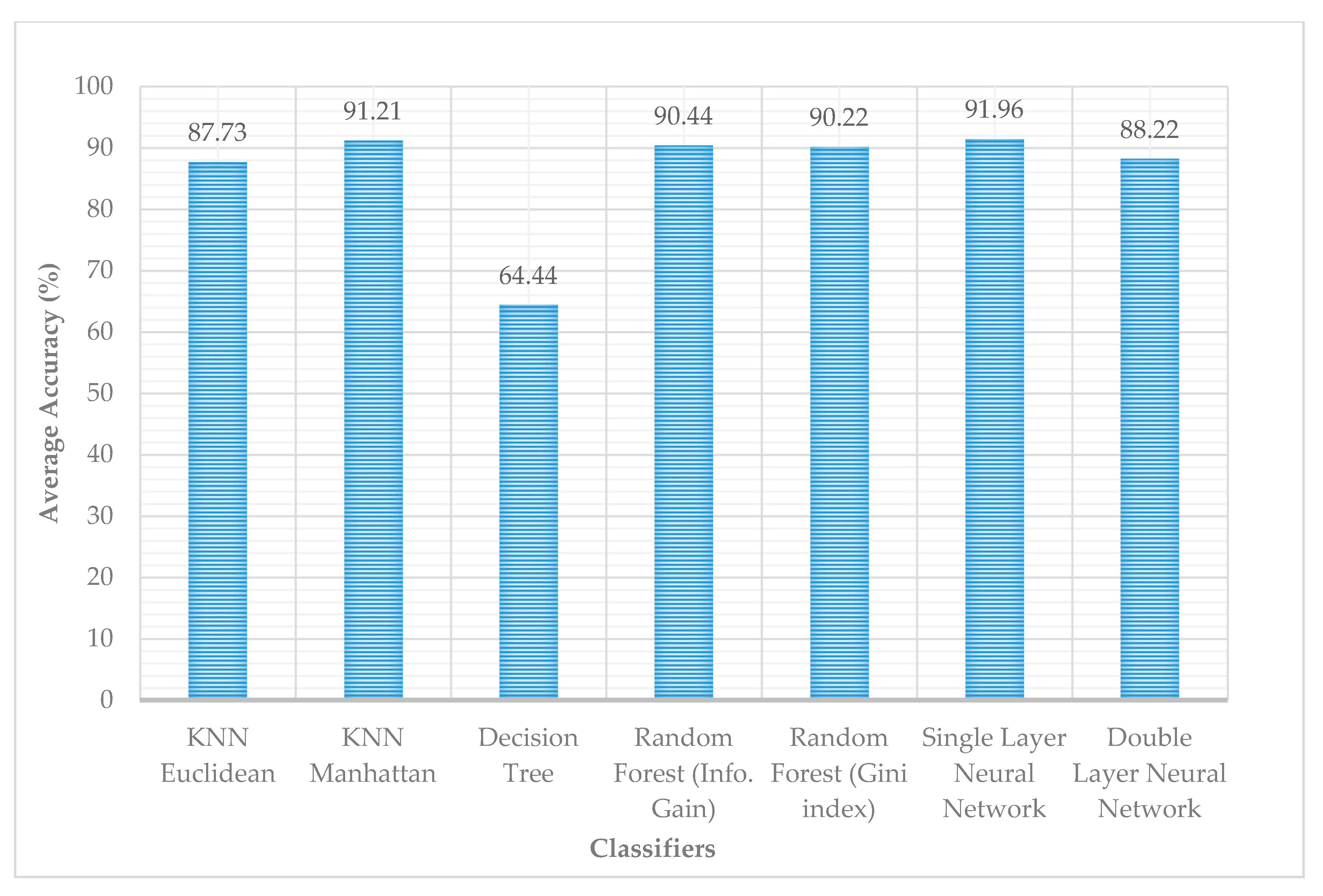
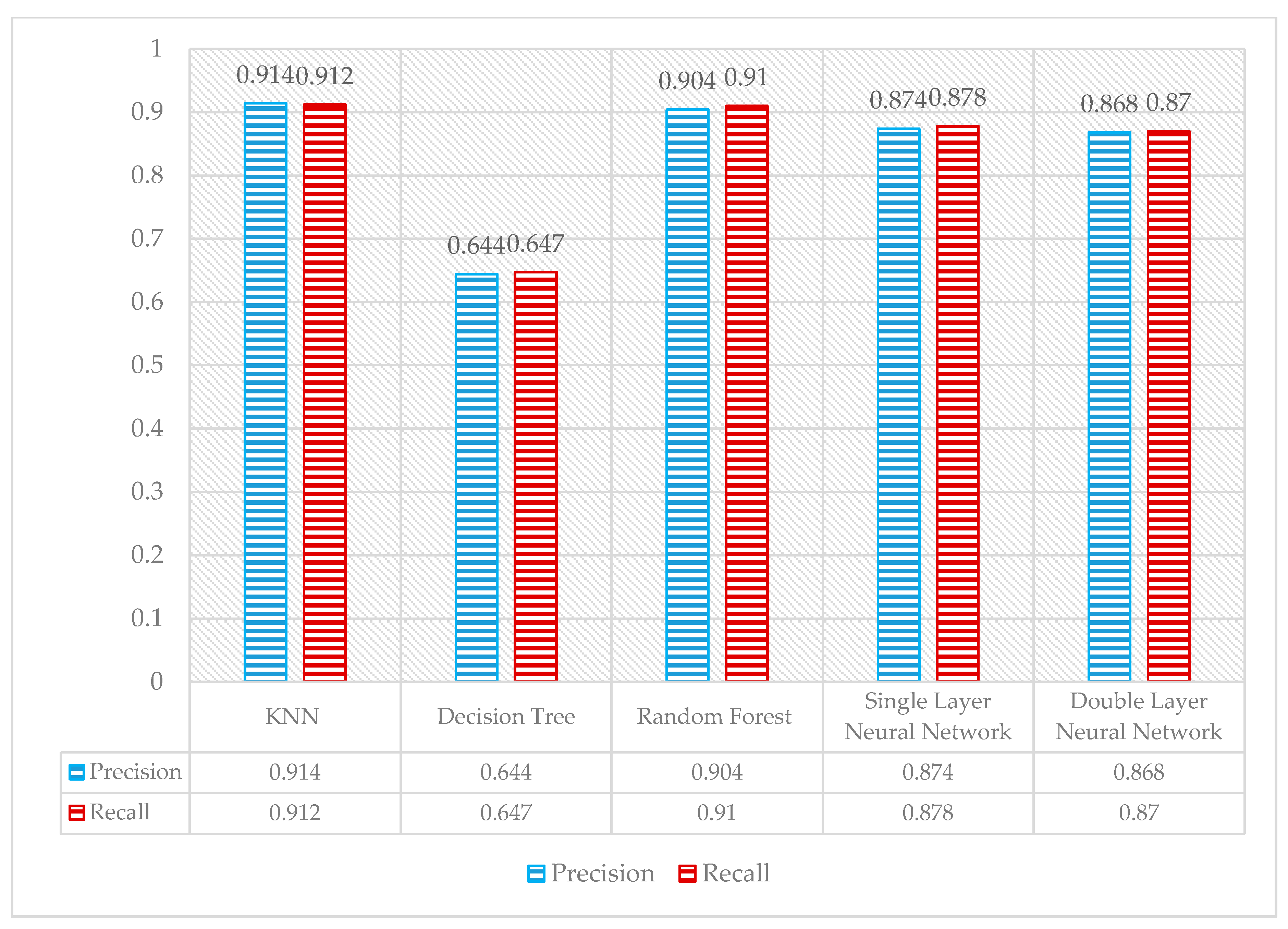
4.3. Performance Comparison of the Classifiers
4.4. Performance Comparison of the Classifiers Using Leave-One-Person-out Cross-Validation
5. Conclusions, Limitations, and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- National Institute of Mental Health. Autism Spectrum Disorder. 2018. Available online: https://www.nimh.nih.gov/health/topics/autism-spectrum-disorders-asd/index.shtml (accessed on 10 December 2020).
- Amiri, A.; Peltier, N.; Goldberg, C.; Sun, Y.; Nathan, A.; Hiremath, S.; Mankodiya, K. WearSense: Detecting Autism stereotypic behaviors through smartwatches. Healthcare 2017, 5, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alwakeel, S.S.; Alhalabi, B.; Aggoune, H.; Alwakeel, M. A machine learning based WSN system for autism activity recognition. In Proceedings of the 2015 IEEE 14th International Conference on Machine Learning ICMLA 2015, Miami, FL, USA, 9–11 December 2015; pp. 771–776. [Google Scholar] [CrossRef]
- Loomes, R.; Hull, L.; Mandy, W.P.L. What is the male-to-female ratio in Autism Spectrum Disorder? A systematic review and meta-analysis. J. Am. Acad. Child Adolesc. Psychiatry 2017, 56, 466–474. [Google Scholar] [CrossRef] [Green Version]
- Capirci, O.; Iverson, J.M.; Pizzuto, E.; Volterra, V. Gestures and words during the transition to two-word speech. J. Child Lang. 1996, 23, 645–673. [Google Scholar] [CrossRef]
- Goldin-Meadow, S.; Alibali, M.W. Gesture’s role in speaking, learning, and creating language. Annu. Rev. Psychol. 2013, 64, 257–283. [Google Scholar] [CrossRef] [Green Version]
- Perrault, A.; Chaby, L.; Bigouret, F.; Oppetit, A.; Cohen, D.; Plaza, M.; Xavier, J. Comprehension of conventional gestures in typical children, children with autism spectrum disorders and children with language disorders. Neuropsychiatr. Enfance. Adolesc. 2019, 67, 1–9. [Google Scholar] [CrossRef]
- Metcalf, D.; Milliard, S.T.J.; Gomez, M.; Schwartz, M. Wearables and the internet of things for health: Wearable, interconnected devices promise more efficient and comprehensive health care. IEEE Pulse 2016, 7, 35–39. [Google Scholar] [CrossRef] [PubMed]
- Clifton, L.; Clifton, D.A.; Pimentel, M.A.F.; Watkinson, P.J.; Tarassenko, L. Predictive monitoring of mobile patients by combining clinical observations with data from wearable sensors. IEEE J. Biomed. Heal. Inform. 2014, 18, 722–730. [Google Scholar] [CrossRef]
- Free, C.; Phillips, G.; Galli, L.; Watson, L.; Felix, L.; Edwards, P.; Patel, V.; Haines, A. The effectiveness of mobile-health technology-based health behaviour change or disease management interventions for health care consumers: A systematic review. PLoS Med. 2013, 10, e1001362. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shoaib, M. Sitting Is the New Smoking: Online Complex Human Activity Recognition with Smartphones and Wearables. Available online: https://research.utwente.nl/en/publications/sitting-is-the-new-smoking-online-complex-human-activity-recognit (accessed on 10 April 2021).
- Lowry, B.L. “Tuning In” to Others: How Young Children Develop Theory of Mind. Available online: http://www.hanen.org/Helpful-Info/Articles/Tuning-In-to-Others-How-Young-Children-Develop.aspx (accessed on 10 May 2021).
- Levy, S.E.; Mandell, D.S.; Schultz, R.T. Autism. Lancet 2009, 374, 1627–1638. [Google Scholar] [CrossRef]
- Behaviour, A.; Cb, C. Stereotypies: A critical review. Anim. Behav. 1991, 41, 1015–1037. [Google Scholar]
- Camada, M.Y.O.; St, D.; Conceic, G.S. Recognition of affective state for austist from stereotyped gestures. In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics, Lisbon, Portugal, 29–31 July 2016; Volume 1, pp. 197–204. [Google Scholar] [CrossRef]
- Guo, H.; Chen, L.; Chen, G.; Lv, M. Smartphone-based activity recognition independent of device orientation and placement. Int. J. Commun. Syst. 2015, 29, 2403–2415. [Google Scholar] [CrossRef]
- Mohammadian Rad, N.; Kia, S.M.; Zarbo, C.; van Laarhoven, T.; Jurman, G.; Venuti, P.; Marchiori, E.; Furlanello, C. Deep learning for automatic stereotypical motor movement detection using wearable sensors in autism spectrum disorders. Signal Processing 2018, 144, 180–191. [Google Scholar] [CrossRef] [Green Version]
- Muir, L.J.; Richardson, I.E.G. Perception of sign language and its application to visual communications for deaf people. J. Deaf Stud. Deaf Educ. 2005, 10, 390–401. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Piana, S.; Staglianò, A.; Camurri, A.; Odone, F. A Set of Full-Body Movement Features for Emotion Recognition to Help Children Affected by Autism Spectrum Condition. Available online: http://www.fdg2013.org/program/workshops/papers/IDGEI2013/idgei2013_4.pdf (accessed on 15 April 2021).
- Rad, N.M.; Bizzego, A.; Kia, S.M.; Jurman, G.; Venuti, P.; Furlanello, C. Convolutional Neural Network for Stereotypical Motor Movement Detection in Autism. arXiv 2015, arXiv:1511.01865; pp. 15–19, 15–19. [Google Scholar]
- Faja, S.; Webb, S.J.; Jones, E.; Merkle, K.; Kamara, D.; Bavaro, J.; Aylward, E.; Dawson, G. The effects of face expertise training on the behavioral performance and brain activity of adults with high functioning autism spectrum disorders. J. Autism Dev. Disord. 2012, 42, 278–293. [Google Scholar] [CrossRef]
- Gonçalves, N.; Costa, S.; Rodrigues, J.; Soares, F. Detection of stereotyped hand flapping movements in Autistic children using the Kinect sensor: A case study. In Proceedings of the 2014 IEEE International Conference on Autonomous Robot Systems and Competitions ICARSC 2014, Espinho, Portugal, 14–15 May 2014; pp. 212–216. [Google Scholar] [CrossRef]
- Incertis, I.G.; García-Bermejo, J.G.; Casanova, E.Z. Hand gesture recognition for deaf people interfacing. In Proceedings of the International Conference on Pattern Recognition, Hong Kong, China, 20–24 August 2006; Volume 2, pp. 100–103. [Google Scholar] [CrossRef]
- Ángel-López, J.P.; de la Peña, N.A. Proceedings of the VII Latin American Congress on Biomedical Engineering CLAIB 2016, Bucaramanga, Santander, Colombia, 26–28 October 2016; Springer: Singapore, 2017; Volume 60, pp. 520–523. [Google Scholar] [CrossRef]
- Sombandith, V.; Walairacht, A.; Walairacht, S. Hand gesture recognition for Lao alphabet sign language using HOG and correlation. In Proceedings of the ECTI-CON 2017—2017 14th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Phuket, Thailand, 27–30 June 2017; pp. 649–651. [Google Scholar] [CrossRef]
- Pappas, I.P.I.; Popovic, M.R.; Keller, T.; Dietz, V.; Morari, M. A reliable gait phase detection system. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 113–125. [Google Scholar] [CrossRef]
- Wu, F.J.; Solmaz, G. We hear your activities through Wi-Fi signals. In Proceedings of the 2016 IEEE 3rd World Forum Internet Things, WF-IoT 2016, Reston, VA, USA, 12–14 December 2016; pp. 251–256. [Google Scholar] [CrossRef] [Green Version]
- Darwish, S.M.; Madbouly, M.M.; Khorsheed, M.B. Hand gesture recognition for sign language: A new higher order fuzzy HMM approach. Int. J. Eng. Technol. 2016, 8, 157–164. [Google Scholar] [CrossRef] [Green Version]
- Bhattacharya, A.; Zope, V.; Kumbhar, K.; Borwankar, P.; Mendes, A. Classification of sign language gestures using machine learning. Int. J. Adv. Res. Comput. Commun. Eng. 2020, 8, 97–103. [Google Scholar] [CrossRef]
- Žemgulys, J.; Raudonis, V.; Maskeliunas, R.; Damaševičius, R. Recognition of basketball referee signals from videos using histogram of oriented gradients (HOG) and support vector machine (SVM). Procedia Comput. Sci. 2018, 130, 953–960. [Google Scholar] [CrossRef]
- Liu, S.; Gao, R.X.; John, D.; Staudenmayer, J.W.; Freedson, P.S. Multisensor data fusion for physical activity assessment. IEEE Trans. Biomed. Eng. 2012, 59, 687–696. [Google Scholar] [CrossRef] [PubMed]
- Gyllensten, I.C.; Bonomi, A.G. Identifying types of physical activity with a single accelerometer: Evaluating laboratory-trained algorithms in daily life. IEEE Trans. Biomed. Eng. 2011, 58, 2656–2663. [Google Scholar] [CrossRef]
- Kwapisz, J.R.; Weiss, G.M.; Moore, S.A. Activity recognition using cell phone accelerometers. ACM SigKDD Explor. Newsl. 2011, 12, 74–82. [Google Scholar] [CrossRef]
- Comput, J.P.D.; Uddin, Z. A wearable sensor-based activity prediction system to facilitate edge computing in smart healthcare system. J. Parallel Distrib. Comput. 2019, 123, 46–53. [Google Scholar] [CrossRef]
- Zhou, S.; Liu, Y.; Li, K. Recognition of Multi-scale Multi-angle Gestures Based on HOG-LBP Feature. In Proceedings of the 2018 15th International Conference on Control, Automation, Robotics and Vision, ICARCV 2018, Singapore, 18–21 November 2018; pp. 407–412. [Google Scholar] [CrossRef]
- Yao, R.; Lin, G.; Shi, Q.; Ranasinghe, D.C. Efficient dense labelling of human activity sequences from wearables using fully convolutional networks rui. Pattern Recognit. 2017. [Google Scholar] [CrossRef]
- Vaitkevičius, A.; Taroza, M.; Blažauskas, T.; Damaševičius, R.; Maskeliunas, R.; Woźniak, M. Recognition of American sign language gestures in a virtual reality using leap motion. Appl. Sci. 2019, 9, 445. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, A.; Misra, S.; Mangrulkar, P.; Rajarajan, M.; Rahulamathavan, Y. SmartARM: A smartphone-based group activity recognition and monitoring scheme for military applications. In Proceedings of the 11th IEEE International Conference on Advanced Networks and Telecommunications Systems, ANTS 2017, Bhubaneswar, India, 17–20 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Farooq, M.; Sazonov, E. Real time monitoring and recognition of eating and physical activity with a wearable device connected to the eyeglass. In Proceedings of the Eleventh International Conference on Sensing Technology, ICST, Sydney, Australia, 4–6 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ramos, A.L.A.; Dalhag, G.D.M.; Daygon, M.L.D.; Omar, J.; La Cruz, K.D.; Macaranas, A.A.; Almodovar, K.L.J. Alphabet hand gesture recognition using histogram of oriented gradients, support vector machine and K-nearest neighbor algorithm. Int. Res. J. Comput. Sci. 2019, 6, 200–205. [Google Scholar]
- Shukor, A.Z.; Miskon, M.F.; Jamaluddin, M.H.; Ibrahim, A.; Asyraf, M.F.; Bazli, M. A new data glove approach for Malaysian sign language detection. Procedia Comput. Sci. 2015, 76, 60–67. [Google Scholar] [CrossRef] [Green Version]
- Nasri, N.; Orts-Escolano, S.; Cazorla, M. An semg-controlled 3d game for rehabilitation therapies: Real-time time hand gesture recognition using deep learning techniques. Sensors 2020, 20, 6451. [Google Scholar] [CrossRef]
- Parcheta, Z.; Martínez-Hinarejos, C.D. Sign language gesture recognition using HMM. Lect. Notes Comput. Sci. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform. 2017, 10255 LNCS, 419–426. [Google Scholar] [CrossRef]
- Mannini, A.; Rosenberger, M.; Haskell, W.L.; Sabatini, A.M.; Intille, S.S. Activity recognition in youth using single accelerometer placed at wrist or ankle. Med. Sci. Sports Exerc. 2017. [Google Scholar] [CrossRef] [Green Version]
- Krishnan, K.S.; Saha, A.; Ramachandran, S.; Kumar, S. Recognition of human arm gestures using Myo armband for the game of hand cricket. In Proceedings of the 2017 IEEE 5th International Symposium on Robotics and Intelligent Sensors, IRIS 2017, Ottawa, ON, Canada, 5–7 October 2017; pp. 389–394. [Google Scholar] [CrossRef]
- Thabtah, F.; Kamalov, F.; Rajab, K. A new computational intelligence approach to detect autistic features for autism screening. Int. J. Med. Inform. 2018. [Google Scholar] [CrossRef] [PubMed]
- Raj, S.; Masood, S. Analysis and detection of autism spectrum disorder using machine learning techniques. Procedia Comput. Sci. 2020, 167, 994–1004. [Google Scholar] [CrossRef]
- Iqbal, A.; Ullah, F.; Anwar, H.; Ur Rehman, A.; Shah, K.; Baig, A.; Ali, S.; Yoo, S.; Kwak, K.S. Wearable internet-of-things platform for human activity recognition and health care. Int. J. Distrib. Sens. Netw. 2020, 16. [Google Scholar] [CrossRef]
- Guo, G.; Wang, H.; Bell, D.; Bi, Y.; Greer, K. KNN model-based approach in classification. In On the Move to Meaningful Internet Systems; Springer: Berlin/Heidelberg, Germany, 2003; pp. 986–996. [Google Scholar]
- Yoav, F.; Mason, L. The alternating decision tree learning algorithm. In Proceedings of the ICML, Bled, Slovenia, 27–30 June 1999; Volume 99, pp. 124–133. [Google Scholar]
- Breiman, L. Random forests. In Machine Learning; Springer: Berlin/Heidelberg, Germany, 2001; Volume 45, pp. 5–32. [Google Scholar]
- Hecht-Nielsen, R. Theory of the backpropagation neural network. In Neural Networks for Perception; Academic Press: Cambridge, MA, USA, 1992; pp. 65–93. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No | Sensors | Activities | Features | Algorithms and Accuracy |
|---|---|---|---|---|
| [2] | Moto 360 smartwatch | Flapping, painting, and sibbing | Discrete cosine transform, FFT, variance, bi-spectrum, z transform, entropy | Simple tree, complex tree, linear and gaussian SVM, boosted and bagged ensemble trees Accuracy: 96.7% |
| [34] | ECG, accelerometer, gyroscope, magnetometer | Walking, climbing stairs, frontal elevation of arms, knees bending, cycling, jogging, running, jump front and back, sitting, relaxing | Mean, standard deviation, and correlation | Mean prediction rate 99.69%, HMM 89.98%, DBN 92.01%, RNN 99.69% |
| [35] | Not mentioned | 9 uniform hand gestures | Not mentioned, total 576 features extracted | SVM 98.72% |
| [36] | Gyroscope, accelerometer | Hand movements, body movements | Publicly available dataset features | Convolutional neural network 87.1%, KNN 66.1%, SVM 77.1%, fully CN 88% |
| [37] | Not mentioned | Static and dynamic unistroke hand gestures | Not mentioned | SVM 97.95% |
| [38] | Accelerometer, magnetometer, gyroscope | Jogging, walking, cycling jumping, running, jump-rope | Mean, standard dev, kurtosis, skewness, range, correlation, spectral energy, spectral entropy, peak frequencies, and cross-spectral densities | SVM 26%, DT 93.24%, KNN 96.07%, RF 97.12%, Naïve Bayes 76.47% |
| [39] | Accelerometer, strain sensor | Walking, eating | Mean value, standard dev, percentiles, and correlation frequency domain (energy, entropy) | DT 93.15% |
| [40] | Camera | Gestures of alphabets | Not mentioned | KNN 94.49% |
| [41] | Flex sensor, accelerometer, camera, | Malaysian sign language gestures | Not mentioned | General algorithm for the data-glove detection system 78.33–5% |
| [42] | Camera | 24 Fingerspelling static gestures | Not mentioned | KNN classifier 87.38%, Logistic regression 84.32%, naïve Bayes classifier 84.62%, support vector machine (SVM) 91.35% |
| [43] | Leap Motion Sensor | Gestures for greetings, possessive adjectives, colors, numbers, names, etc. | Not mentioned | Hidden Markov models (HMM) 87.4%, KNN+DTW 88.4% |
| [44] | Accelerometer | Cycling, sedentary, ambulation | Mean, standard deviation, acceleration range | SVM from 88.5% to 91.6% |
| [45] | Not mentioned | ASL alphabets and basic hand shapes | The number of fingers, the width and height of the gesture, the distance between the hand fingers, etc. | Type-2 Fuzzy HMM (T2FHMM) 100% accuracy for uniform hand images and 95.5% for cluttered hand images |
| [24] | Flex sensor | Patterns representing:
| Not mentioned | K-nearest neighbor decision tree dynamic time warpinga verage accuracy = 90% |
| [46] | QA screening method using mobile app | Not mentioned | Age, sex, ethnicity, country of residence, etc. | RIPPER 80.95%, C4.5 82.54% |
| [47] | Not mentioned Dataset taken from UCL Machine Learning repository | Common attributes like age, nationality, sex, etc. | Not mentioned | SVM 98.30%, KNN 88.13%, CNN 98.30% ANN 98.30%, naïve Bayes 94.91%, LR 98.30% |
| Sensors | Sampling Frequency (Hz) | Quantization Levels (Bits) | Range |
|---|---|---|---|
| Accelerometer | 50 | 16 | ±16 gs |
| Gyroscope | 50 | 16 | ±2000°/s |
| Gesture | Label | Gesture | Labels |
|---|---|---|---|
| Good Morning | G1 | Angry | G13 |
| Good Afternoon | G2 | Bulb | G14 |
| Good Night | G3 | Cricket | G15 |
| Good Bye | G4 | Fan off | G16 |
| Thank you | G5 | Fan on | G17 |
| Please | G6 | Switch | G18 |
| Yes | G7 | Milk | G19 |
| No | G8 | Need eraser | G20 |
| Wow | G9 | Need pencil | G21 |
| Hello | G10 | Need toilet | G22 |
| Sleep | G11 | Need water | G23 |
| Afraid | G12 | School book | G24 |
| Gestures Label | No. Records | Gestures Label | No. Records |
|---|---|---|---|
| G1 | 99 | G13 | 100 |
| G2 | 85 | G14 | 99 |
| G3 | 100 | G15 | 90 |
| G4 | 90 | G16 | 89 |
| G5 | 86 | G17 | 97 |
| G6 | 90 | G18 | 99 |
| G7 | 100 | G19 | 99 |
| G8 | 98 | G20 | 90 |
| G9 | 93 | G21 | 89 |
| G10 | 80 | G22 | 97 |
| G11 | 100 | G23 | 90 |
| G12 | 103 | G24 | 78 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siddiqui, U.A.; Ullah, F.; Iqbal, A.; Khan, A.; Ullah, R.; Paracha, S.; Shahzad, H.; Kwak, K.-S. Wearable-Sensors-Based Platform for Gesture Recognition of Autism Spectrum Disorder Children Using Machine Learning Algorithms. Sensors 2021, 21, 3319. https://0-doi-org.brum.beds.ac.uk/10.3390/s21103319
Siddiqui UA, Ullah F, Iqbal A, Khan A, Ullah R, Paracha S, Shahzad H, Kwak K-S. Wearable-Sensors-Based Platform for Gesture Recognition of Autism Spectrum Disorder Children Using Machine Learning Algorithms. Sensors. 2021; 21(10):3319. https://0-doi-org.brum.beds.ac.uk/10.3390/s21103319
Chicago/Turabian StyleSiddiqui, Uzma Abid, Farman Ullah, Asif Iqbal, Ajmal Khan, Rehmat Ullah, Sheroz Paracha, Hassan Shahzad, and Kyung-Sup Kwak. 2021. "Wearable-Sensors-Based Platform for Gesture Recognition of Autism Spectrum Disorder Children Using Machine Learning Algorithms" Sensors 21, no. 10: 3319. https://0-doi-org.brum.beds.ac.uk/10.3390/s21103319