
Fuzzy Overclustering: Semi-Supervised Classification of Fuzzy Labels with Overclustering and Inverse Cross-Entropy

 , , , , and
, , , , and
Abstract
:1. Introduction
- We identify an issue of semi-supervised algorithms that they do not work well with fuzzy labels. However, such fuzzy labels occur regularly in underwater image classification e.g due to high natural variation of depicted objects which leads to a high inter- and intraobserver variability.
- We propose a novel framework for handling fuzzy labels with a semi-supervised approach. This framework uses overclustering to find substructures in fuzzy data and outperforms common state-of-the-art semi-supervised methods like FixMatch [38] on fuzzy plankton data.
- We propose a novel loss, Inverse Cross-entropy (CE), which improves the overclustering quality in semi-supervised learning.
- We achieve 5 to 10% more self-consistent predictions on fuzzy plankton data.
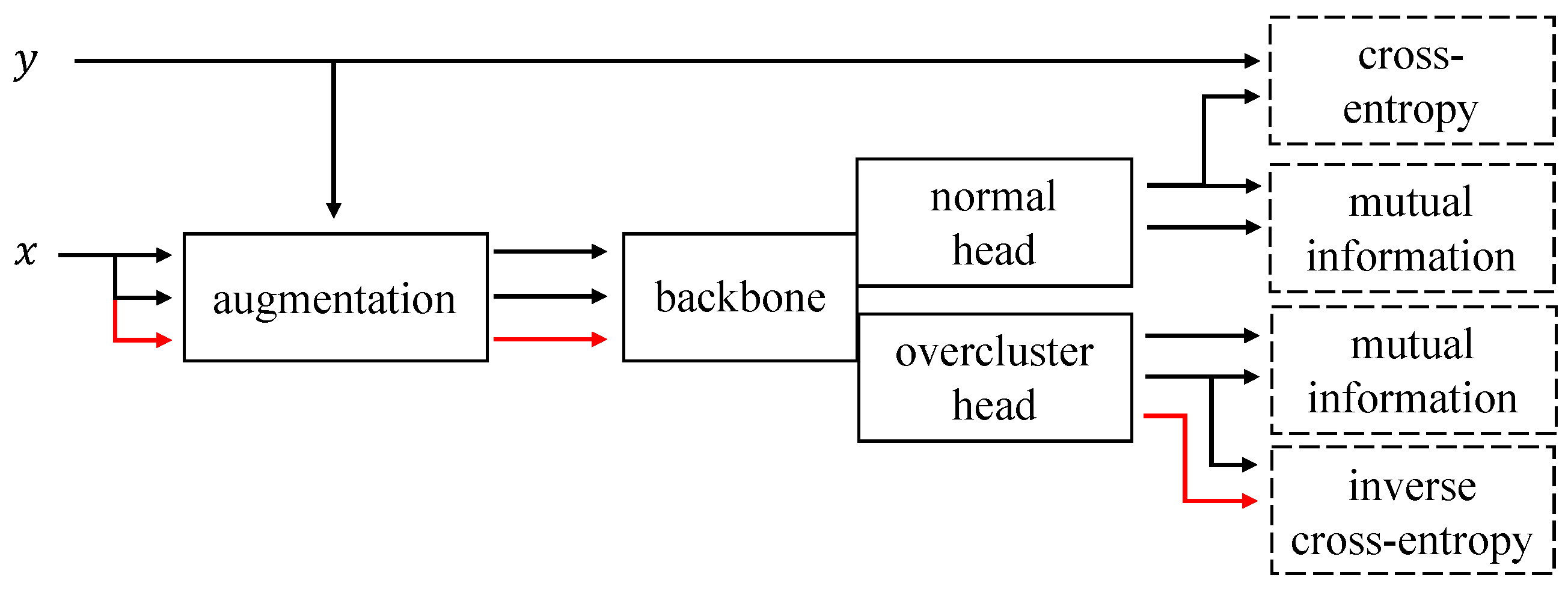
2. Method
| Algorithm 1: Pseudocode for our method Fuzzy Overclustering |
 |
2.1. Inverse Cross-Entropy (CE)
2.2. Mutual Information (MI)
2.3. Supervised Augmentations
2.4. Restricted Unsupervised Data
3. Experiments
3.1. Datasets
3.1.1. Plankton
3.1.2. STL-10
3.1.3. Synthetic Circles and Ellipses (SYN-CE)
3.2. Implementation Details
3.3. Metrics
3.4. Results
3.4.1. State-of-the-Art Comparison
3.4.2. Consistency
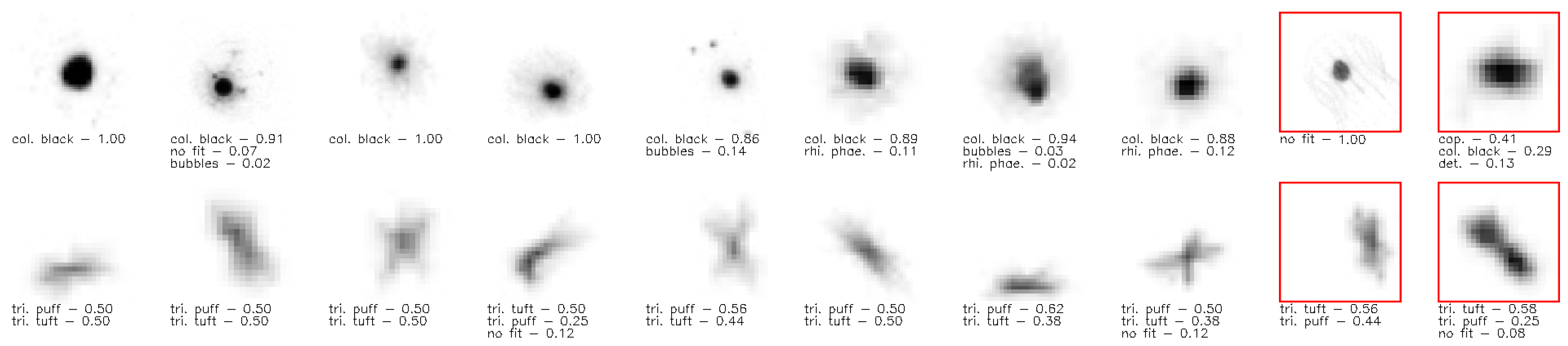
3.4.3. Qualitative Results
3.5. Ablation Studies
3.5.1. SYN-CE
3.5.2. Loss & Network
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Saleh, A.; Laradji, I.H.; Konovalov, D.A.; Bradley, M.; Vazquez, D.; Sheaves, M. A realistic fish-habitat dataset to evaluate algorithms for underwater visual analysis. Sci. Rep. 2020, 10, 14671. [Google Scholar] [CrossRef] [PubMed]
- Gómez-Ríos, A.; Tabik, S.; Luengo, J.; Shihavuddin, A.S.M.; Krawczyk, B.; Herrera, F. Towards highly accurate coral texture images classification using deep convolutional neural networks and data augmentation. Expert Syst. Appl. 2019, 118, 315–328. [Google Scholar] [CrossRef] [Green Version]
- Thum, G.W.; Tang, S.H.; Ahmad, S.A.; Alrifaey, M. Toward a highly accurate classification of underwater cable images via deep convolutional neural network. J. Mar. Sci. Eng. 2020, 8, 924. [Google Scholar] [CrossRef]
- Knausgård, K.M.; Wiklund, A.; Sørdalen, T.K.; Halvorsen, K.T.; Kleiven, A.R.; Jiao, L.; Goodwin, M. Temperate fish detection and classification: A deep learning based approach. Appl. Intell. 2021. [Google Scholar] [CrossRef]
- Lombard, F.; Boss, E.; Waite, A.M.; Uitz, J.; Stemmann, L.; Sosik, H.M.; Schulz, J.; Romagnan, J.B.; Picheral, M.; Pearlman, J.; et al. Globally consistent quantitative observations of planktonic ecosystems. Front. Mar. Sci. 2019, 6, 196. [Google Scholar] [CrossRef] [Green Version]
- Giering, S.L.C.; Cavan, E.L.; Basedow, S.L.; Briggs, N.; Burd, A.B.; Darroch, L.J.; Guidi, L.; Irisson, J.O.; Iversen, M.H.; Kiko, R.; et al. Sinking Organic Particles in the Ocean—Flux Estimates From in situ Optical Devices. Front. Mar. Sci. 2020, 6, 834. [Google Scholar] [CrossRef] [Green Version]
- Addison, P.F.E.; Collins, D.J.; Trebilco, R.; Howe, S.; Bax, N.; Hedge, P.; Jones, G.; Miloslavich, P.; Roelfsema, C.; Sams, M.; et al. A new wave of marine evidence-based management: Emerging challenges and solutions to transform monitoring, evaluating, and reporting. ICES J. Mar. Sci. 2018, 75, 941–952. [Google Scholar] [CrossRef] [Green Version]
- Durden, J.M.; Bett, B.J.; Schoening, T.; Morris, K.J.; Nattkemper, T.W.; Ruhl, H.A. Comparison of image annotation data generated by multiple investigators for benthic ecology. Mar. Ecol. Prog. Ser. 2016, 552, 61–70. [Google Scholar] [CrossRef] [Green Version]
- Schoening, T.; Bergmann, M.; Ontrup, J.; Taylor, J.; Dannheim, J.; Gutt, J.; Purser, A.; Nattkemper, T.W. Semi-automated image analysis for the assessment of megafaunal densities at the Artic deep-sea observatory HAUSGARTEN. PLoS ONE 2012, 7, e38179. [Google Scholar] [CrossRef] [Green Version]
- Schröder, S.M.; Kiko, R.; Koch, R. MorphoCluster: Efficient Annotation of Plankton images by Clustering. Sensors 2020, 20, 3060. [Google Scholar] [CrossRef]
- Karimi, D.; Dou, H.; Warfield, S.K.; Gholipour, A. Deep learning with noisy labels: Exploring techniques and remedies in medical image analysis. Med. Image Anal. 2020, 65, 101759. [Google Scholar] [CrossRef] [PubMed]
- Brünger, J.; Dippel, S.; Koch, R.; Veit, C. ‘Tailception’: Using neural networks for assessing tail lesions on pictures of pig carcasses. Animal 2019, 13, 1030–1036. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schmarje, L.; Zelenka, C.; Geisen, U.; Glüer, C.C.; Koch, R. 2D and 3D Segmentation of Uncertain Local Collagen Fiber Orientations in SHG Microscopy. In DAGM German Conference of Pattern Regocnition; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11824 LNCS, pp. 374–386. [Google Scholar] [CrossRef] [Green Version]
- De Fauw, J.; Ledsam, J.R.; Romera-Paredes, B.; Nikolov, S.; Tomasev, N.; Blackwell, S.; Askham, H.; Glorot, X.; O’Donoghue, B.; Visentin, D.; et al. Clinically applicable deep learning for diagnosis and referral in retinal disease. Nat. Med. 2018, 24, 1342–1350. [Google Scholar] [CrossRef] [PubMed]
- Karimi, D.; Nir, G.; Fazli, L.; Black, P.C.; Goldenberg, L.; Salcudean, S.E. Deep Learning-Based Gleason Grading of Prostate Cancer From Histopathology Images—Role of Multiscale Decision Aggregation and Data Augmentation. IEEE J. Biomed. Health Inform. 2020, 24, 1413–1426. [Google Scholar] [CrossRef]
- Dos Reis, F.J.C.; Lynn, S.; Ali, H.R.; Eccles, D.; Hanby, A.; Provenzano, E.; Caldas, C.; Howat, W.J.; McDuffus, L.A.; Liu, B.; et al. Crowdsourcing the general public for large scale molecular pathology studies in cancer. EBioMedicine 2015, 2, 681–689. [Google Scholar] [CrossRef]
- Culverhouse, P.; Williams, R.; Reguera, B.; Herry, V.; González-Gil, S. Do experts make mistakes? A comparison of human and machine identification of dinoflagellates. Mar. Ecol. Prog. Ser. 2003, 247, 17–25. [Google Scholar] [CrossRef] [Green Version]
- Tarling, P.; Cantor, M.; Clapés, A.; Escalera, S. Deep learning with self-supervision and uncertainty regularization to count fish in underwater images. arXiv 2021, arXiv:2104.14964. [Google Scholar]
- Berthelot, D.; Carlini, N.; Cubuk, E.D.; Kurakin, A.; Sohn, K.; Zhang, H.; Raffel, C. ReMixMatch: Semi-Supervised Learning with Distribution Alignment and Augmentation Anchoring. arXiv 2019, arXiv:1911.09785. [Google Scholar]
- Zhai, X.; Oliver, A.; Kolesnikov, A.; Beyer, L. S4L: Self-Supervised Semi-Supervised Learning. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 1476–1485. [Google Scholar]
- Chen, T.; Kornblith, S.; Norouzi, M.; Hinton, G. A Simple Framework for Contrastive Learning of Visual Representations. arXiv 2020, arXiv:2002.05709. [Google Scholar]
- Gidaris, S.; Singh, P.; Komodakis, N. Unsupervised Representation Learning by Predicting Image Rotations. arXiv 2018, arXiv:1803.07728. [Google Scholar]
- Ji, X.; Henriques, J.F.; Vedaldi, A.; Ji, X.; Henriques, J.F.; Vedaldi, A. Invariant information clustering for unsupervised image classification and segmentation. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 9865–9874. [Google Scholar]
- Schmarje, L.; Santarossa, M.; Schroder, S.M.; Koch, R. A Survey on Semi-, Self-and Unsupervised Learning for Image Classification. IEEE Access 2021, 9, 82146–82168. [Google Scholar] [CrossRef]
- Coates, A.; Ng, A.; Lee, H. An analysis of single-layer networks in unsupervised feature learning. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, Fort Lauderdale, FL, USA, 11–13 April 2011; pp. 215–223. [Google Scholar]
- Algan, G.; Ulusoy, I. Image Classification with Deep Learning in the Presence of Noisy Labels: A Survey. Knowl.-Based Syst. 2021, 215, 106771. [Google Scholar] [CrossRef]
- Song, H.; Kim, M.; Park, D.; Lee, J. Learning from Noisy Labels with Deep Neural Networks: A Survey. arXiv 2020, arXiv:1406.2080. [Google Scholar]
- Nguyen, D.T.; Mummadi, C.K.; Ngo, T.P.N.; Nguyen, T.H.P.; Beggel, L.; Brox, T. SELF: Learning to Filter Noisy Labels with Self-Ensembling. arXiv 2019, arXiv:1910.01842. [Google Scholar]
- Laine, S.; Aila, T. Temporal ensembling for semi-supervised learning. arXiv 2016, arXiv:1610.02242. [Google Scholar]
- Li, J.; Socher, R.; Hoi, S.C.H. DivideMix: Learning with Noisy Labels as Semi-supervised Learning. arXiv 2020, arXiv:2002.07394. [Google Scholar]
- Geng, X. Label distribution learning. IEEE Trans. Knowl. Data Eng. 2016, 28, 1734–1748. [Google Scholar] [CrossRef] [Green Version]
- Gao, B.B.; Xing, C.; Xie, C.W.; Wu, J.; Geng, X. Deep Label Distribution Learning With Label Ambiguity. IEEE Trans. Image Process. 2017, 26, 2825–2838. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, J.; Ma, Y.; Qu, F.; Zang, D. Semi-supervised Fuzzy Min–Max Neural Network for Data Classification. Neural Process. Lett. 2020, 51, 1445–1464. [Google Scholar] [CrossRef]
- Kowsari, K.; Bari, N.; Vichr, R.; Goodarzi, F.A. FSL-BM: Fuzzy Supervised Learning with Binary Meta-Feature for Classification. In Future of Information and Communication Conference; Springer: Cham, Switzerland, 2018; pp. 655–670. [Google Scholar]
- El-Zahhar, M.M.; El-Gayar, N.F. A semi-supervised learning approach for soft labeled data. In Proceedings of the 2010 10th International Conference on Intelligent Systems Design and Applications, Cairo, Egypt, 29 November–1 December 2010; pp. 1136–1141. [Google Scholar]
- Liu, Y.; Liang, X.; Tong, S.; Kumada, T. Photo Shot-Type Disambiguation by Multi-Classifier Semi-Supervised Learning. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019; pp. 2466–2470. [Google Scholar]
- Caron, M.; Bojanowski, P.; Joulin, A.; Douze, M. Deep clustering for unsupervised learning of visual features. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 132–149. [Google Scholar]
- Sohn, K.; Berthelot, D.; Li, C.L.; Zhang, Z.; Carlini, N.; Cubuk, E.D.; Kurakin, A.; Zhang, H.; Raffel, C. FixMatch: Simplifying Semi-Supervised Learning with Consistency and Confidence. arXiv 2020, arXiv:2001.07685. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity Mappings in Deep Residual Networks. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, the Netherlands, 8–16 October 2016; pp. 630–645. [Google Scholar]
- Grandvalet, Y.; Bengio, Y. Semi-supervised learning by entropy minimization. Adv. Neural Inf. Process. Syst. 2005, 367, 529–536. [Google Scholar]
- Xie, Q.; Dai, Z.; Hovy, E.; Luong, M.T.; Le, Q.V. Unsupervised Data Augmentation for Consistency Training. arXiv 2019, arXiv:1904.12848. [Google Scholar]
- Miyato, T.; Maeda, S.I.; Koyama, M.; Ishii, S. Virtual adversarial training: A regularization method for supervised and semi-supervised learning. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 41, 1979–1993. [Google Scholar]
- Berthelot, D.; Carlini, N.; Goodfellow, I.; Papernot, N.; Oliver, A.; Raffel, C.A. Mixmatch: A holistic approach to semi-supervised learning. arXiv 2019, arXiv:1905.02249. [Google Scholar]
- Picheral, M.; Guidi, L.; Stemmann, L.; Karl, D.M.; Iddaoud, G.; Gorsky, G. The Underwater Vision Profiler 5: An advanced instrument for high spatial resolution studies of particle size spectra and zooplankton. Limnol. Oceanogr. Methods 2010, 8, 462–473. [Google Scholar] [CrossRef] [Green Version]
- Picheral, M.; Colin, S.; Irisson, J.O. EcoTaxa, a Tool for the Taxonomic Classification of Images. 2017. Available online: https://ecotaxa.obs-vlfr.fr/ (accessed on 6 October 2021).
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 60, 1097–1105. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Hinton, G. Learning Multiple Layers of Features from Tiny Images. Technical Report. 2009. Available online: https://www.cs.toronto.edu/~kriz/learning-features-2009-TR.pdf (accessed on 6 October 2021).
- Van Gansbeke, W.; Vandenhende, S.; Georgoulis, S.; Proesmans, M.; Van Gool, L. Scan: Learning to classify images without labels. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2020; pp. 268–285. [Google Scholar]
- Tarvainen, A.; Valpola, H. Mean teachers are better role models: Weight-averaged consistency targets improve semi-supervised deep learning results. arXiv 2017, arXiv:1703.01780. [Google Scholar]
- Lee, D.H. Pseudo-label: The simple and efficient semi-supervised learning method for deep neural networks. In Workshop on Challenges in Representation Learning; ICML: Atlanta, GA, USA, 2013; Volume 3, p. 2. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Type of Data | |||
|---|---|---|---|
| Method | Network | Certain | Fuzzy |
| SCAN [48] | ResNet18 | 76.80 ± 1.10 | 37.64 ± 3.56 |
| IIC [23] | ResNet34 | 85.76 ± 1.36 | 65.47 ± 1.86 |
| IIC [23] | ResNet34 | 88.8 | 66.81 ± 1.85 |
| Mean-Teacher [49] | Wide ResNet28 | 78.577 ± 2.39 | 72.85 ± 0.46 |
| Pi [29] | Wide ResNet28 | 73.77 ± 0.82 | 74.34 ± 0.58 |
| Pseudo-label [50] | Wide ResNet28 | 72.01 ± 0.83 | 75.04 ± 0.52 |
| FixMatch [38] | Wide ResNet28 | 94.83 ± 0.63 | 76.28 ± 0.27 |
| FOC-Light (Ours) | ResNet50 | – | 72.79 ± 2.99 |
| FOC (Ours) | ResNet50 | 86.12 ± 1.22 | 76.79 ± 1.18 |
| All Data | Ignore Class No-Fit | |||
|---|---|---|---|---|
| Method | Overall | Per Cluster | Overall | Per Cluster |
| FixMatch [38] | 82.56 | 78.78 ± 28.22 | 77.11 | 69.61 ± 29.41 |
| FOC (Ours) | 87.80 | 79.66 ± 18.88 | 86.31 | 86.41 ± 13.68 |
| Method | Ideal | Real | Fuzzy |
|---|---|---|---|
| Mean-Teacher [49] | 97.11 ± 0.78 | 73.23 ± 2.49 | 66.57 ± 16.27 |
| Pi [29] | 98.44 ± 0.28 | 72.74 ± 2.43 | 77.69 ± 5.02 |
| Pseudo-label [50] | 98.17 ± 0.30 | 75.70 ± 1.98 | 89.48 ± 1.94 |
| FixMatch [38] | 98.32 ± 0.01 | 71.81 ± 1.06 | 93.82 ± 1.83 |
| FOC-Light (Ours) | 97.46 ± 4.39 | 78.77 ± 7.83 | 94.29 ± 0.87 |
| FOC (Ours) | 97.72 ± 4.52 | 83.86 ± 4.21 | 94.15 ± 0.29 |
| Accuracy | ||||||
|---|---|---|---|---|---|---|
| Method | Warm | MI | CE | Weight | Overcluster | Normal |
| FOC | X | – | 70.92 ± 2.42 | 76.39 ± 0.05 | ||
| IIC * [23] | X | – | 85.76 | |||
| FOC | X | X | – | 73.88 ± 0.21 | 82.01 ± 5.31 | |
| FOC | X | X | X | – | 82.59 ± 0.06 | 86.49 ± 0.01 |
| FOC | X | X | X | C | 84.36 ± 0.64 | 78.59 ± 7.40 |
| FOC | X | X | X | I | 83.57 ± 0.10 | 85.21 ± 0.03 |
| (a) STL-10 | ||||||
| F1-Score | ||||||
| Method | Warm | MI | CE | Weight | Overcluster | Normal |
| IIC [23] | X | – | – | 66.63 | ||
| IIC [23] | X | – | – | 69.92 | ||
| FOC | C | 31.45 ± 6.02 | 39.35 ± 1.30 | |||
| FOC | X | C | 29.82 ± 2.98 | 60.65 ± 0.02 | ||
| FOC | X | X | C | 70.11 ± 1.99 | 64.10 ± 0.13 | |
| FOC | X | C | 23.95 ± 2.63 | 58.71 ± 2.07 | ||
| FOC | X | X | C | 69.36 ± 0.05 | 56.59 ± 0.04 | |
| FOC | X | X | X | C | 70.68 ± 0.10 | 58.09 ± 0.03 |
| FOC | I | 29.88 ± 2.75 | 54.92 ± 0.03 | |||
| FOC-Light | X | I | 74.93 ± 0.22 | 73.64 ± 0.06 | ||
| FOC | X | I | 72.70 ± 0.36 | 64.78 ± 0.04 | ||
| FOC | X | X | I | 73.93 ± 0.29 | 64.84 ± 0.03 | |
| FOC | X | I | 73.93 ± 0.29 | 64.84 ± 0.03 | ||
| FOC | X | X | I | 69.64 ± 1.04 | 66.56 ± 0.08 | |
| FOC | X | X | X | I | 74.01 ± 3.17 | 65.17 ± 0.18 |
| (b) plankton dataset | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmarje, L.; Brünger, J.; Santarossa, M.; Schröder, S.-M.; Kiko, R.; Koch, R. Fuzzy Overclustering: Semi-Supervised Classification of Fuzzy Labels with Overclustering and Inverse Cross-Entropy. Sensors 2021, 21, 6661. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196661
Schmarje L, Brünger J, Santarossa M, Schröder S-M, Kiko R, Koch R. Fuzzy Overclustering: Semi-Supervised Classification of Fuzzy Labels with Overclustering and Inverse Cross-Entropy. Sensors. 2021; 21(19):6661. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196661
Chicago/Turabian StyleSchmarje, Lars, Johannes Brünger, Monty Santarossa, Simon-Martin Schröder, Rainer Kiko, and Reinhard Koch. 2021. "Fuzzy Overclustering: Semi-Supervised Classification of Fuzzy Labels with Overclustering and Inverse Cross-Entropy" Sensors 21, no. 19: 6661. https://0-doi-org.brum.beds.ac.uk/10.3390/s21196661