Performance Evaluation of Attribute-Based Encryption in Automotive Embedded Platform for Secure Software Over-The-Air Update

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
2.1. Attribute-Based Encryption
- The algorithm generates a master key and an encryption key;
- the algorithm generates a decryption key, taking, as input, the master key and an an attribute set which describes the owner of the generated decryption key;
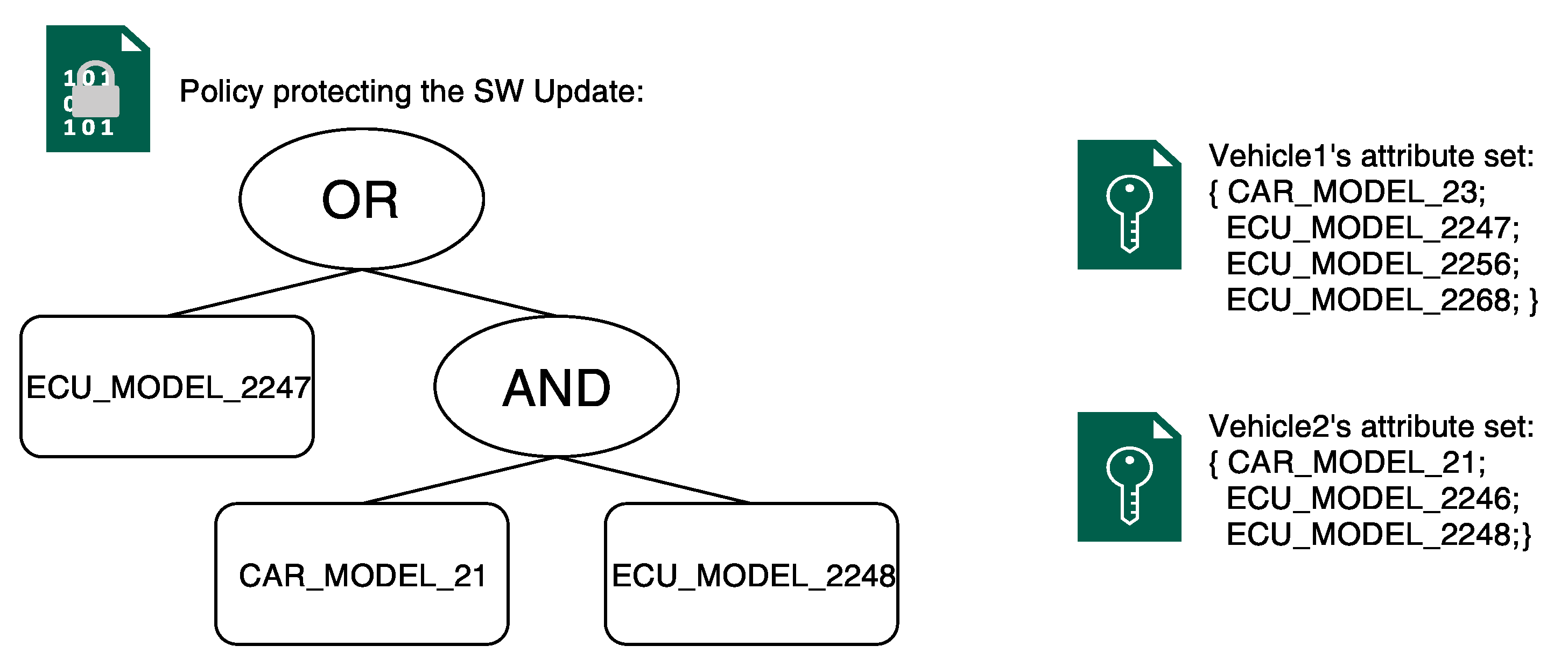
- the algorithm generates a ciphertext, taking, as input, the encryption key, a message, and an access policy which describes the data being encrypted; and,
- the algorithm takes as input a decryption key and a ciphertext, returning the decrypted message if and only if the attribute set satisfies the access policy.
2.2. Over the Air Frameworks
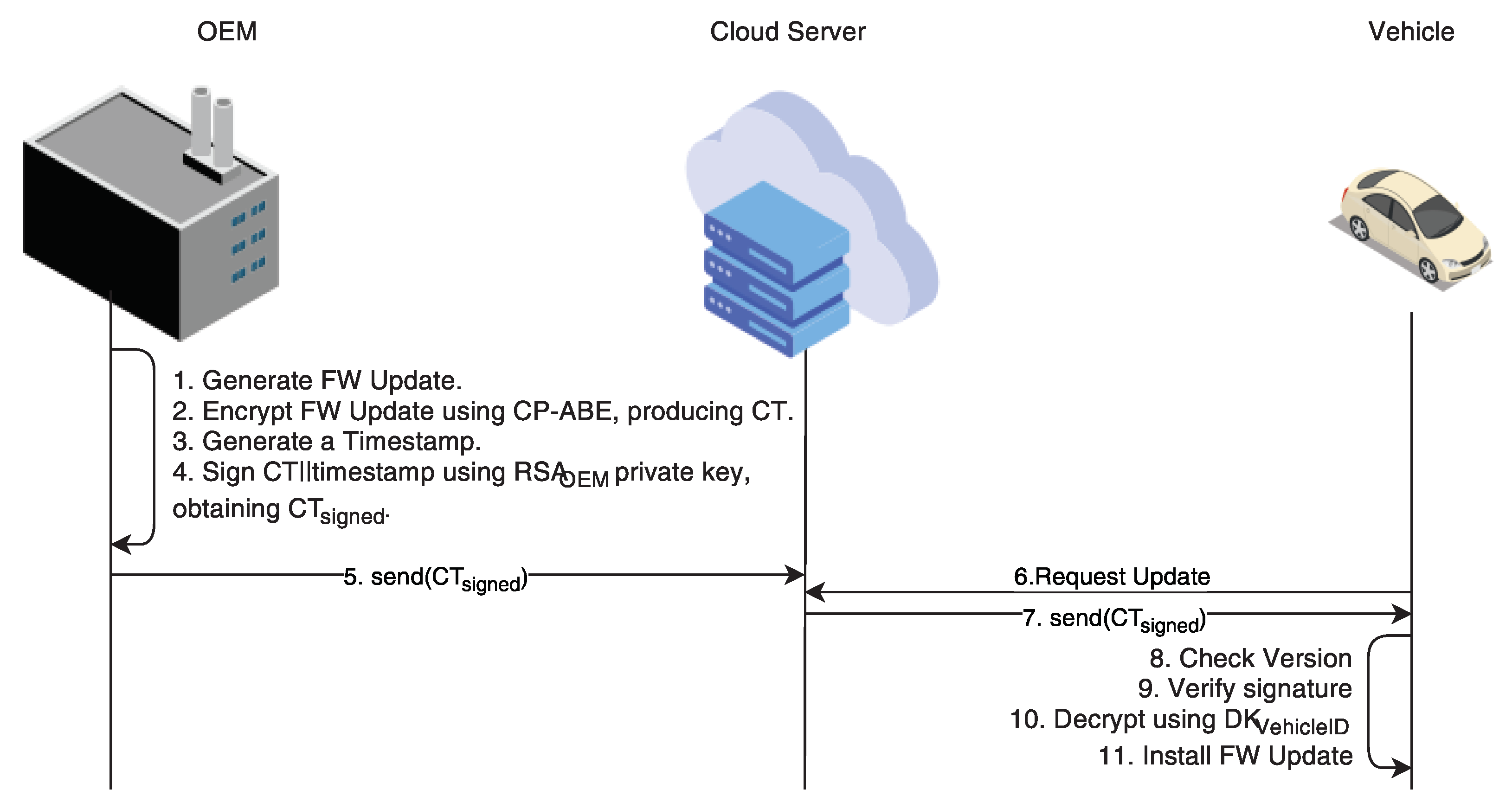
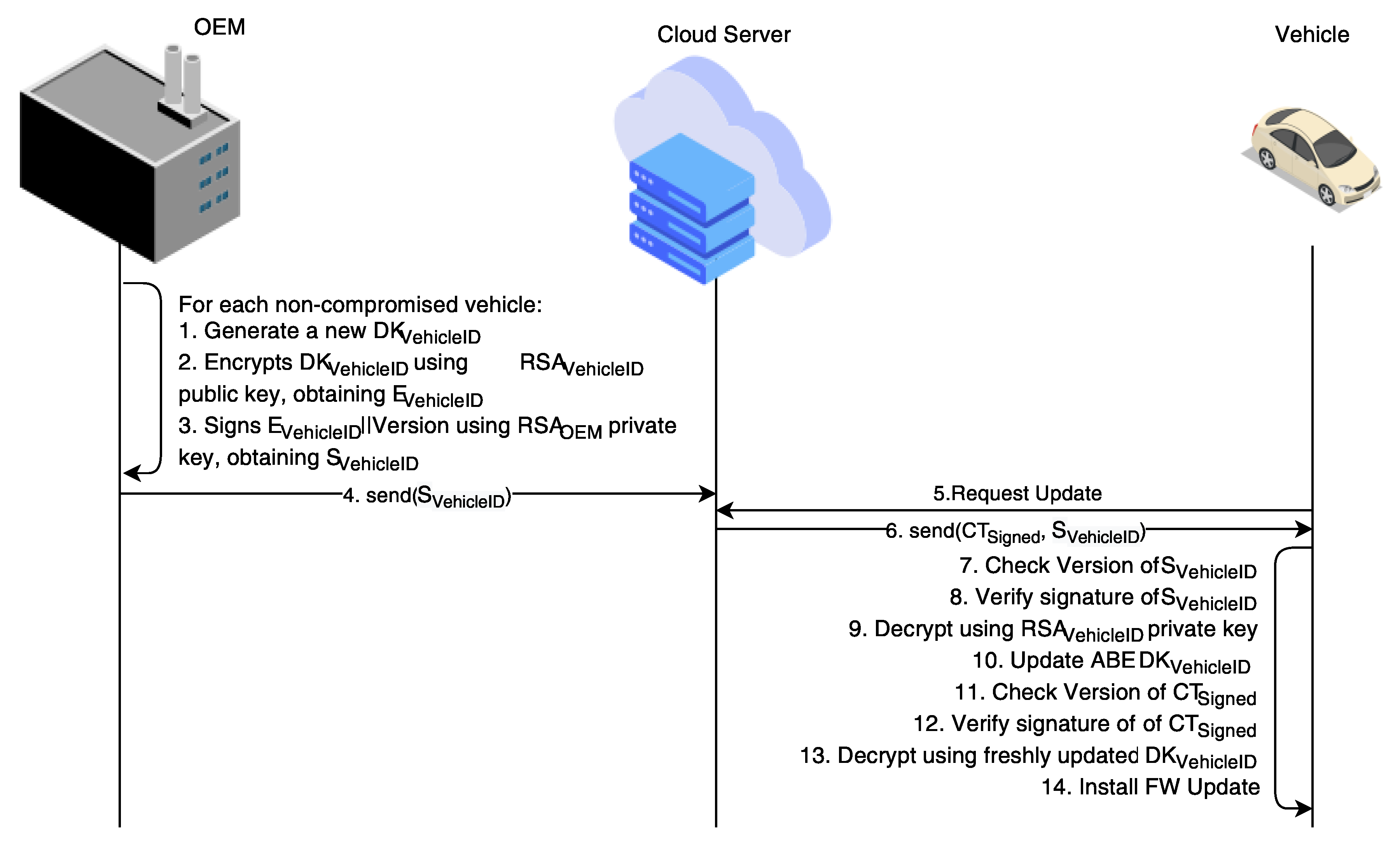
- End-to-End authentication and integrity: the update must be signed by the manufacturer and verified by the device.
- Update Authorization from Controller: only authorized devices can install the update.
- Attestation of update installation: the device must provide proof of the update installation.
- Protection of Code and secret key on device: the update must be stored and then installed in secure storage and isolated execution of critical code.
- Minimal burden for the device.
2.3. Testing Platforms and Automotive Hardware Background
3. Methods
Attacker Model
4. Performance Evaluation
4.1. Experimental Setup
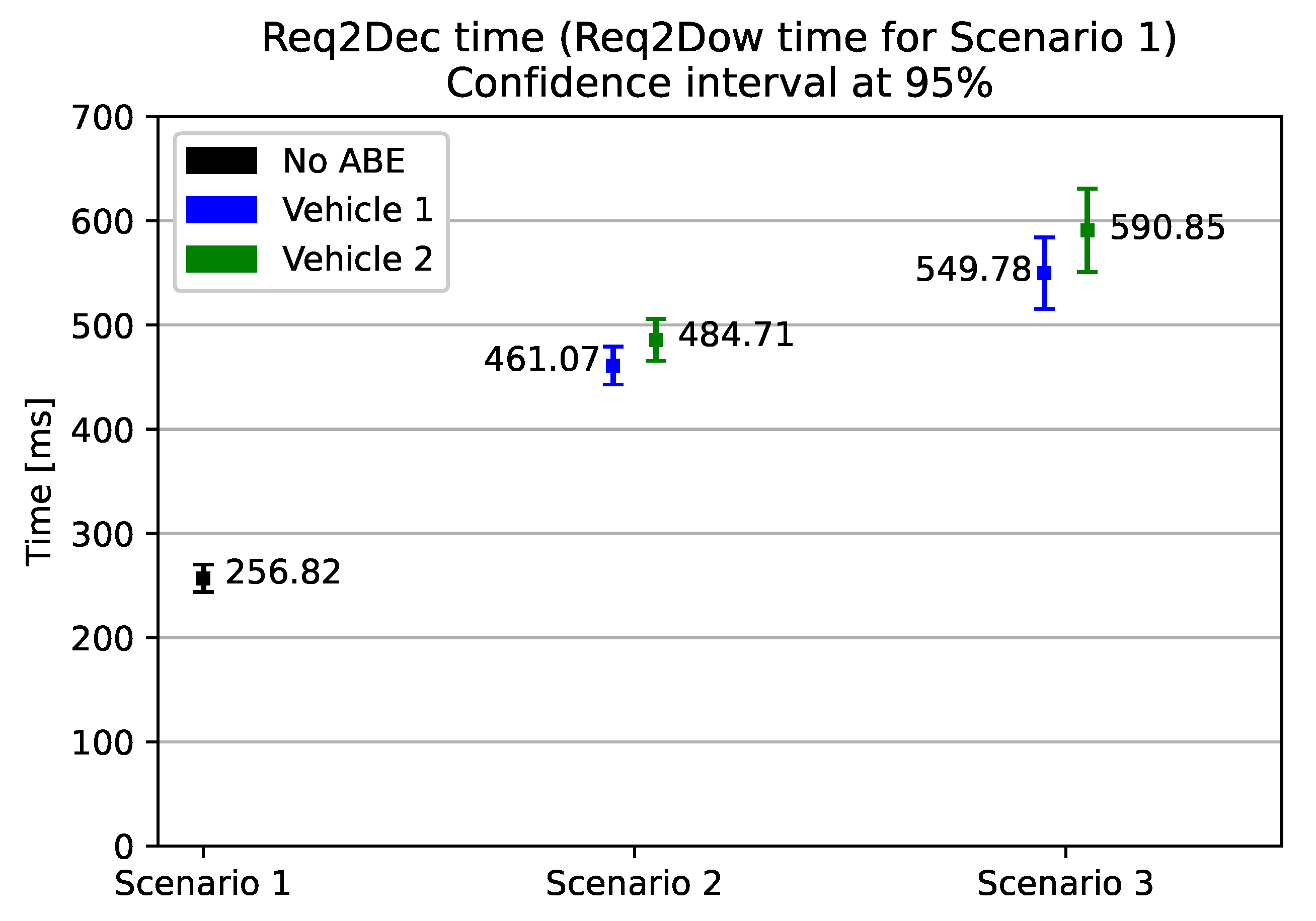
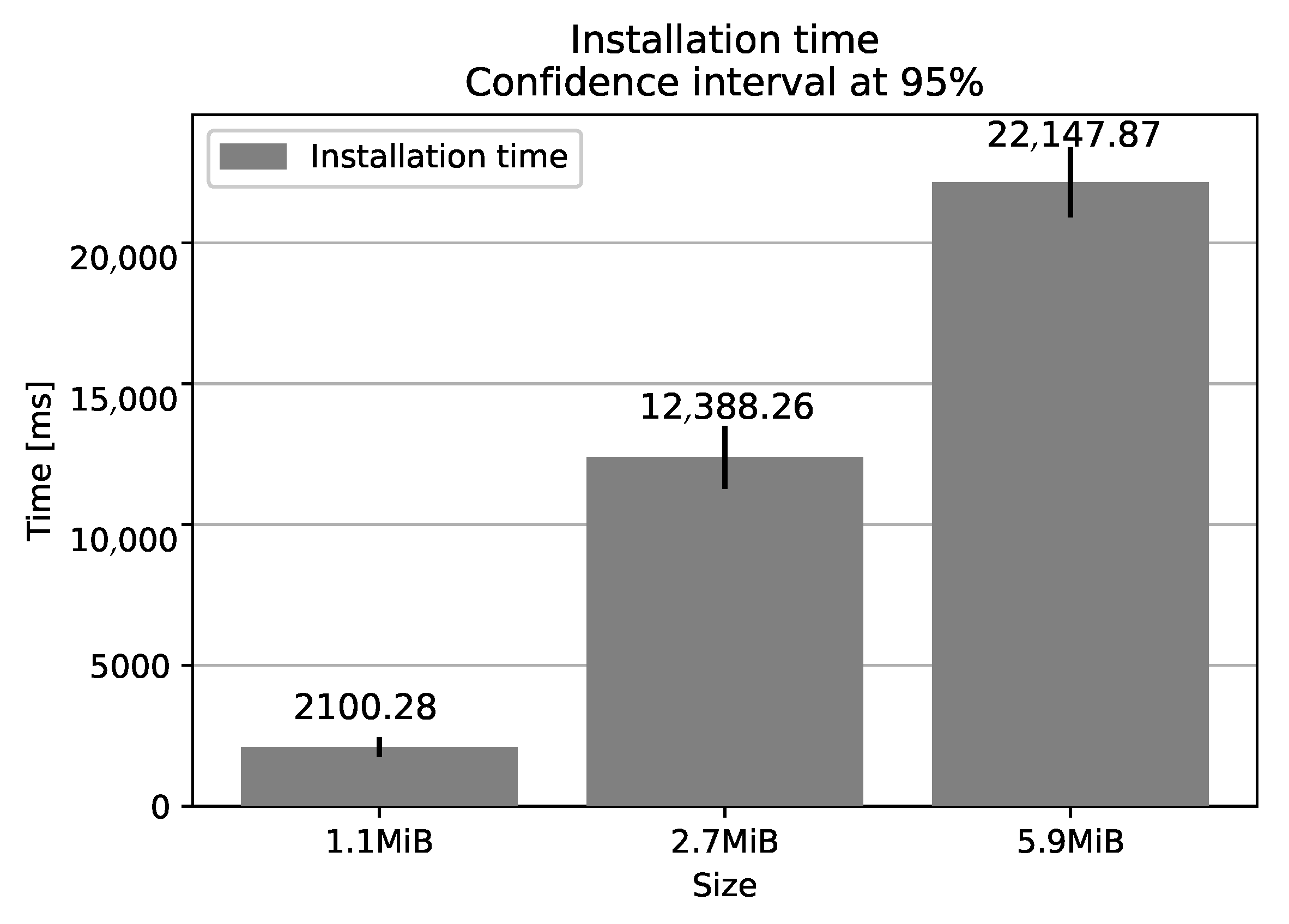
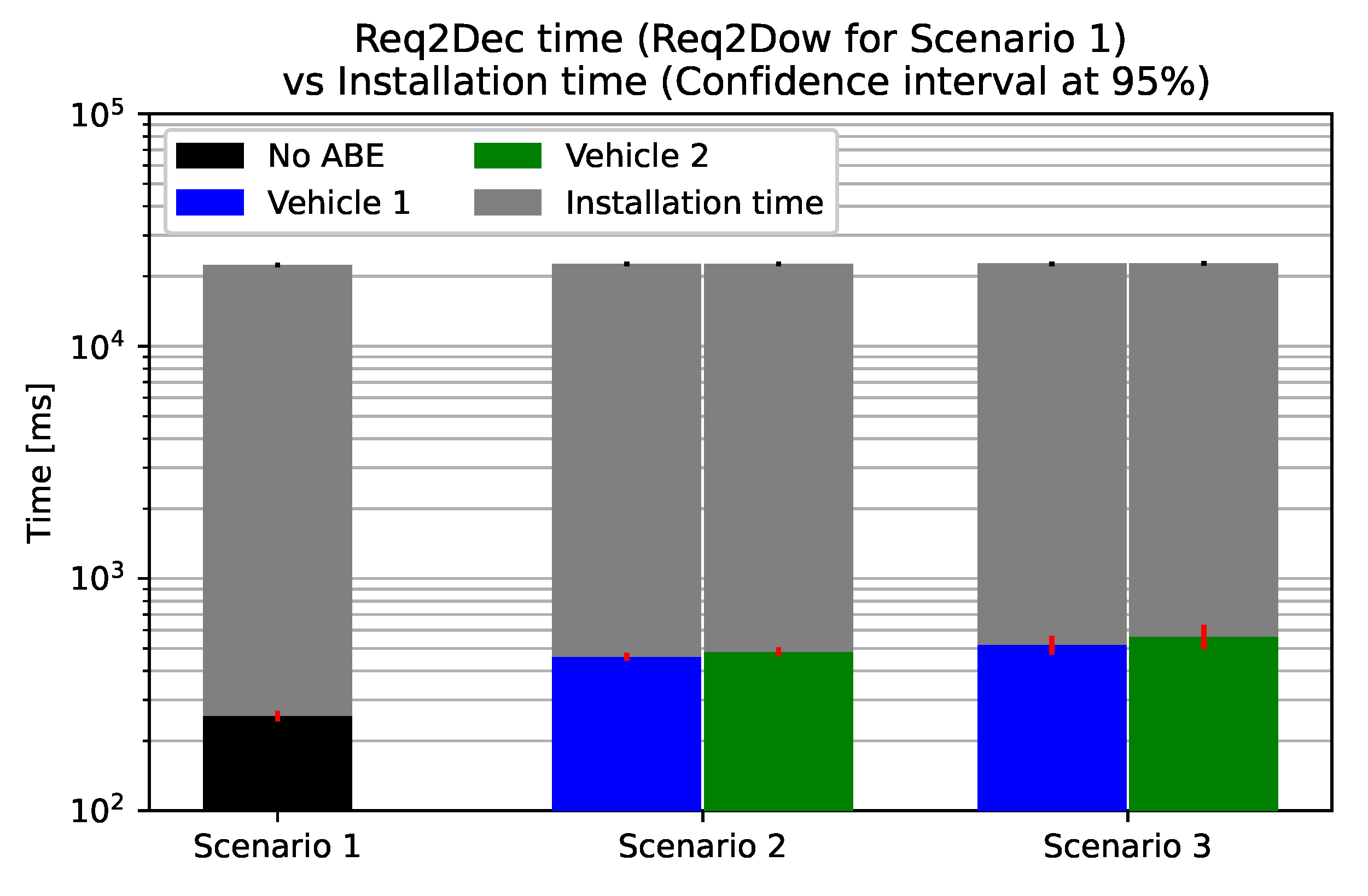
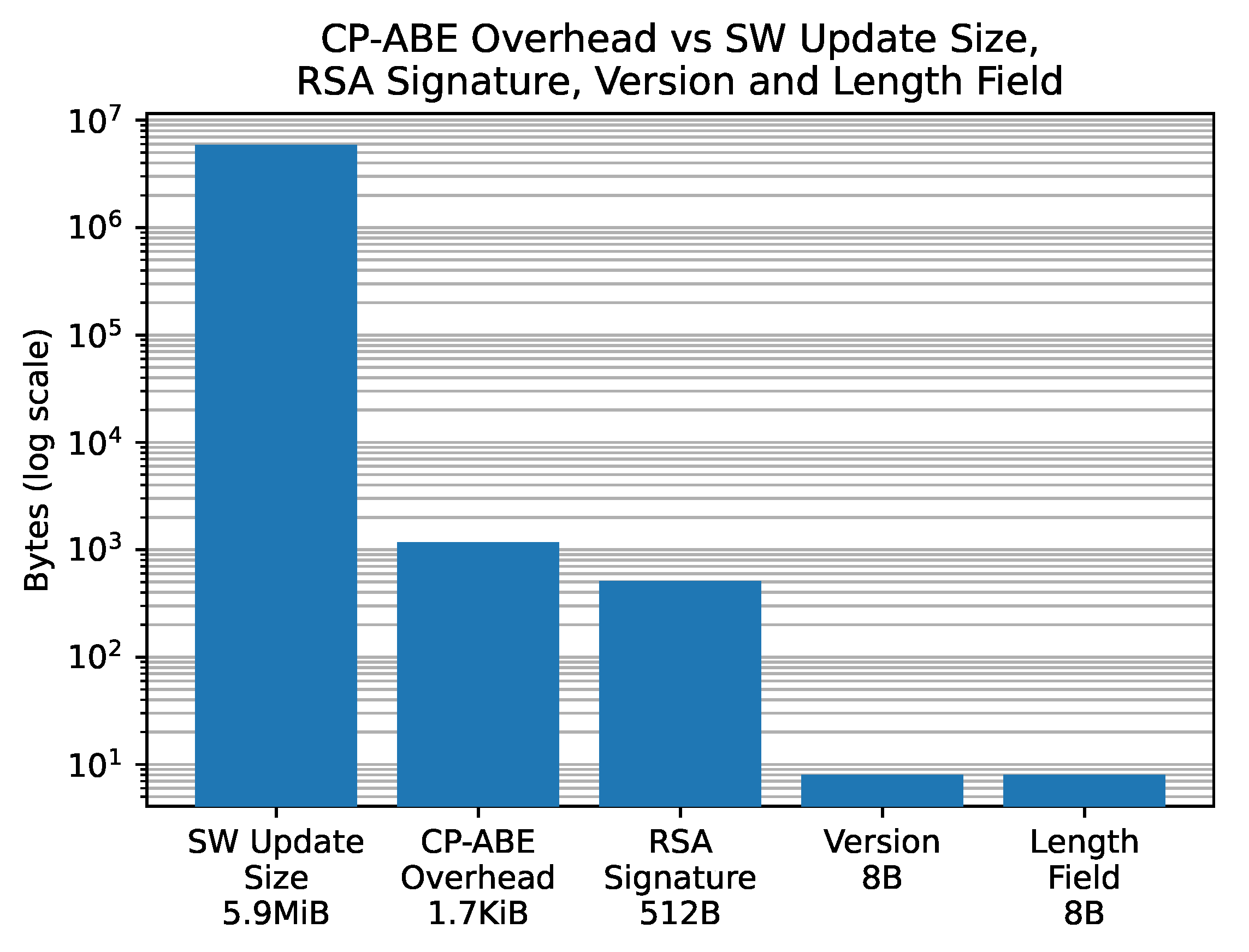
4.2. Results
5. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- NXP. Whitepaper NXP. 2018. Available online: https://www.nxp.com/docs/en/white-paper/AUTOGWDEVWPUS.pdf (accessed on 2 November 2020).
- McConnell, S. Code Complete: A Practical Handbook of Software Construction, 2nd ed.; Microsoft Press: Redmond, WA, USA, 2009. [Google Scholar]
- Kocher, P.; Horn, J.; Fogh, A.; Genkin, D.; Gruss, D.; Haas, W.; Hamburg, M.; Lipp, M.; Mangard, S.; Prescher, T.; et al. Spectre attacks: Exploiting speculative execution. In Proceedings of the 2019 IEEE Symposium on Security and Privacy (SP), San Francisco, CA, USA, 19–23 May 2019; pp. 1–19. [Google Scholar]
- Lipp, M.; Schwarz, M.; Gruss, D.; Prescher, T.; Haas, W.; Mangard, S.; Kocher, P.; Genkin, D.; Yarom, Y.; Hamburg, M. Meltdown. arXiv 2018, arXiv:1801.01207. [Google Scholar]
- European Processor Initiative. 2019. Available online: www.european-processor-initiative.eu/ (accessed on 2 November 2020).
- Kovač, M.; Notton, P.; Hofman, D.; Knezović, J. How Europe is Preparing its Core Solution for Exascale Machines and a Global, Sovereign, Advanced Computing Platform. Math. Comput. Appl. 2020, 25, 46. [Google Scholar] [CrossRef]
- Asokan, N.; Nyman, T.; Rattanavipanon, N.; Sadeghi, A.R.; Tsudik, G. ASSURED: Architecture for secure software update of realistic embedded devices. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2018, 37, 2290–2300. [Google Scholar] [CrossRef] [Green Version]
- Karthik, T.; Brown, A.; Awwad, S.; McCoy, D.; Bielawski, R.; Mott, C.; Lauzon, S.; Weimerskirch, A.; Cappos, J. Uptane: Securing software updates for automobiles. In Proceedings of the International Conference on Embedded Security in Car, Munich, Germany, 16–17 November 2016; pp. 1–11. [Google Scholar]
- AutosarAdaptive. Specification of Update and Configuration Management. 2019. Available online: https://www.autosar.org/fileadmin/user_upload/standards/adaptive/19-11/AUTOSAR_SWS_UpdateAndConfigManagement.pdf (accessed on 2 November 2020).
- Girgenti, B.; Perazzo, P.; Vallati, C.; Righetti, F.; Dini, G.; Anastasi, G. On the feasibility of attribute-based encryption on constrained IoT devices for smart systems. In Proceedings of the 2019 IEEE International Conference on Smart Computing (SMARTCOMP), Washington, DC, USA, 12–14 June 2019; pp. 225–232. [Google Scholar]
- Ambrosin, M.; Conti, M.; Dargahi, T. On the feasibility of attribute-based encryption on smartphone devices. In Proceedings of the 2015 Workshop on IoT challenges in Mobile and Industrial Systems, Florence, Italy, 18 May 2015; pp. 49–54. [Google Scholar]
- Ambrosin, M.; Anzanpour, A.; Conti, M.; Dargahi, T.; Moosavi, S.R.; Rahmani, A.M.; Liljeberg, P. On the feasibility of attribute-based encryption on internet of things devices. IEEE Micro 2016, 36, 25–35. [Google Scholar] [CrossRef] [Green Version]
- Bethencourt, J.; Sahai, A.; Waters, B. Ciphertext-policy attribute-based encryption. In Proceedings of the SP’07. IEEE Symposium on Security and Privacy, Oakland, CA, USA, 20–23 May 2007; pp. 321–334. [Google Scholar]
- Cui, H.; Deng, R.H.; Li, Y.; Qin, B. Server-aided revocable attribute-based encryption. In Proceedings of the European Symposium on Research in Computer Security, Heraklion, Greece, 28–30 September 2016; Springer: Cham, Switzerland, 2016; pp. 570–587. [Google Scholar]
- Liu, J.K.; Yuen, T.H.; Zhang, P.; Liang, K. Time-based direct revocable ciphertext-policy attribute-based encryption with short revocation list. In Proceedings of the International Conference on Applied Cryptography and Network Security, Leuven, Belgium, 2–4 July 2018; Springer: Cham, Switzerland, 2018; pp. 516–534. [Google Scholar]
- La Manna, M.; Perazzo, P.; Rasori, M.; Dini, G. fABElous: An attribute-based scheme for industrial internet of things. In Proceedings of the 2019 IEEE International Conference on Smart Computing (SMARTCOMP), Washington, DC, USA, 12–14 June 2019; pp. 33–38. [Google Scholar]
- Yu, S.; Wang, C.; Ren, K.; Lou, W. Achieving secure, scalable, and fine-grained data access control in cloud computing. In Proceedings of the Infocom 2010, San Diego, CA, USA, 14–19 March 2010; pp. 1–9. [Google Scholar]
- Attrapadung, N.; Libert, B.; De Panafieu, E. Expressive key-policy attribute-based encryption with constant-size ciphertexts. In Proceedings of the International Workshop on Public Key Cryptography, Taormina, Italy, 6–9 March 2011; Springer: Cham, Switzerland, 2011; pp. 90–108. [Google Scholar]
- Rasori, M.; Perazzo, P.; Dini, G. ABE-Cities: An attribute-based encryption system for smart cities. In Proceedings of the 2018 IEEE International Conference on Smart Computing (SMARTCOMP), Sicily, Italy, 18–20 June 2018; pp. 65–72. [Google Scholar]
- Rasori, M.; Perazzo, P.; Dini, G. A lightweight and scalable attribute-based encryption system for smart cities. Comput. Commun. 2020, 149, 78–89. [Google Scholar] [CrossRef]
- Sicari, S.; Rizzardi, A.; Dini, G.; Perazzo, P.; La Manna, M.; Coen-Porisini, A. Attribute-based encryption and sticky policies for data access control in a smart home scenario: A comparison on networked smart object middleware. Int. J. Inf. Secur. 2020, 1–19. [Google Scholar] [CrossRef]
- Aptiv. What Is Over-the-Air (OTA)? 2020. Available online: www.aptiv.com/newsroom/article/what-is-over-the-air-(ota) (accessed on 2 November 2020).
- Vector. Vector Automotive OTA Solution. 2020. Available online: www.vector.com/int/en/products/products-a-z/software/vconnect (accessed on 2 November 2020).
- Ghosal, A.; Halder, S.; Conti, M. STRIDE: Scalable and Secure Over-The-Air Software Update Scheme for Autonomous Vehicles. In Proceedings of the ICC 2020-2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Varga, A. OMNeT++. In Modeling and Tools for Network Simulation; Springer: Cham, Switzerland, 2010; pp. 35–59. [Google Scholar]
- Halder, S.; Ghosal, A.; Conti, M. Secure Over-The-Air Software Updates in Connected Vehicles: A Survey. Comput. Netw. 2020, 178, 107343. [Google Scholar] [CrossRef]
- Sahai, A.; Waters, B. Fuzzy identity-based encryption. In Proceedings of the Annual International Conference on the Theory and Applications of Cryptographic Techniques, Darmstadt, Germany, 19–23 May 2005; Springer: Cham, Switzerland, 2005; pp. 457–473. [Google Scholar]
- Evita. Vehicular Security Hardware. 2008. Available online: https://www.evita-project.org/Publications/Wolf08.pdf (accessed on 2 November 2020).
- Xilinx. Xilinx and Continental Collaborate to Create Auto Industry’s First Production-Ready 4D Imaging Radar for Autonomous Driving. 2020. Available online: www.xilinx.com/news/press/2020/xilinx-and-continental-collaborate-to-create-auto-industry-s-first-production-ready-4d-imaging-radar-for-autonomous-driving.html (accessed on 2 November 2020).
- Rivest, R.L.; Shamir, A.; Adleman, L. A method for obtaining digital signatures and public-key cryptosystems. Commun. ACM 1978, 21, 120–126. [Google Scholar] [CrossRef]
- Kocher, P.; Genkin, D.; Gruss, D.; Haas, W.; Hamburg, M.; Lipp, M.; Mangard, S.; Prescher, T.; Schwarz, M.; Yarom, Y. Spectre Attacks: Exploiting Speculative Execution. arXiv 2018, arXiv:1801.01203. [Google Scholar]
- Bethencourt, J.; Sahai, A.; Waters, B. The Cpabe Toolkit 2011. Available online: http://acsc.cs.utexas.edu/cpabe/ (accessed on 2 November 2020).
- Tesla. Tesla Update Timeline. 2020. Available online: https://teslascope.com/teslapedia/software/timeline (accessed on 2 November 2020).
- Tesla. Tesla Average SW Update Size. 2020. Available online: https://forums.tesla.com/discussion/134348/size-of-software-updates (accessed on 2 November 2020).
- Fürst, S.; Bechter, M. AUTOSAR for connected and autonomous vehicles: The AUTOSAR adaptive platform. In Proceedings of the 46th annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshop (DSN-W), Toulouse, France, 28 June–1 July 2016; pp. 215–217. [Google Scholar]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
La Manna, M.; Treccozzi, L.; Perazzo, P.; Saponara, S.; Dini, G. Performance Evaluation of Attribute-Based Encryption in Automotive Embedded Platform for Secure Software Over-The-Air Update. Sensors 2021, 21, 515. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020515
La Manna M, Treccozzi L, Perazzo P, Saponara S, Dini G. Performance Evaluation of Attribute-Based Encryption in Automotive Embedded Platform for Secure Software Over-The-Air Update. Sensors. 2021; 21(2):515. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020515
Chicago/Turabian StyleLa Manna, Michele, Luigi Treccozzi, Pericle Perazzo, Sergio Saponara, and Gianluca Dini. 2021. "Performance Evaluation of Attribute-Based Encryption in Automotive Embedded Platform for Secure Software Over-The-Air Update" Sensors 21, no. 2: 515. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020515