Design and Validation of a Scalable, Reconfigurable and Low-Cost Structural Health Monitoring System

 , , , , , , and
, , , , , , and 
Abstract
:1. Introduction
2. Monitoring System Design
2.1. Requirements
- Ability to acquire a potentially high number of digital MEMS accelerometers.
- Ability to generate proper input signals to command the excitation devices, for example, an inertial shaker with different patterns: noise, tones, frequency sweeps, etc.
- Possibility of acquiring and integrating information from other sensors (load cells, temperature, humidity, etc.), both analogue and digital.
- Possibility of autonomous operation with recording in a cloud database.
- Low cost, by selecting components that allow to reduce the investment and operational cost in comparison with standard commercial systems.
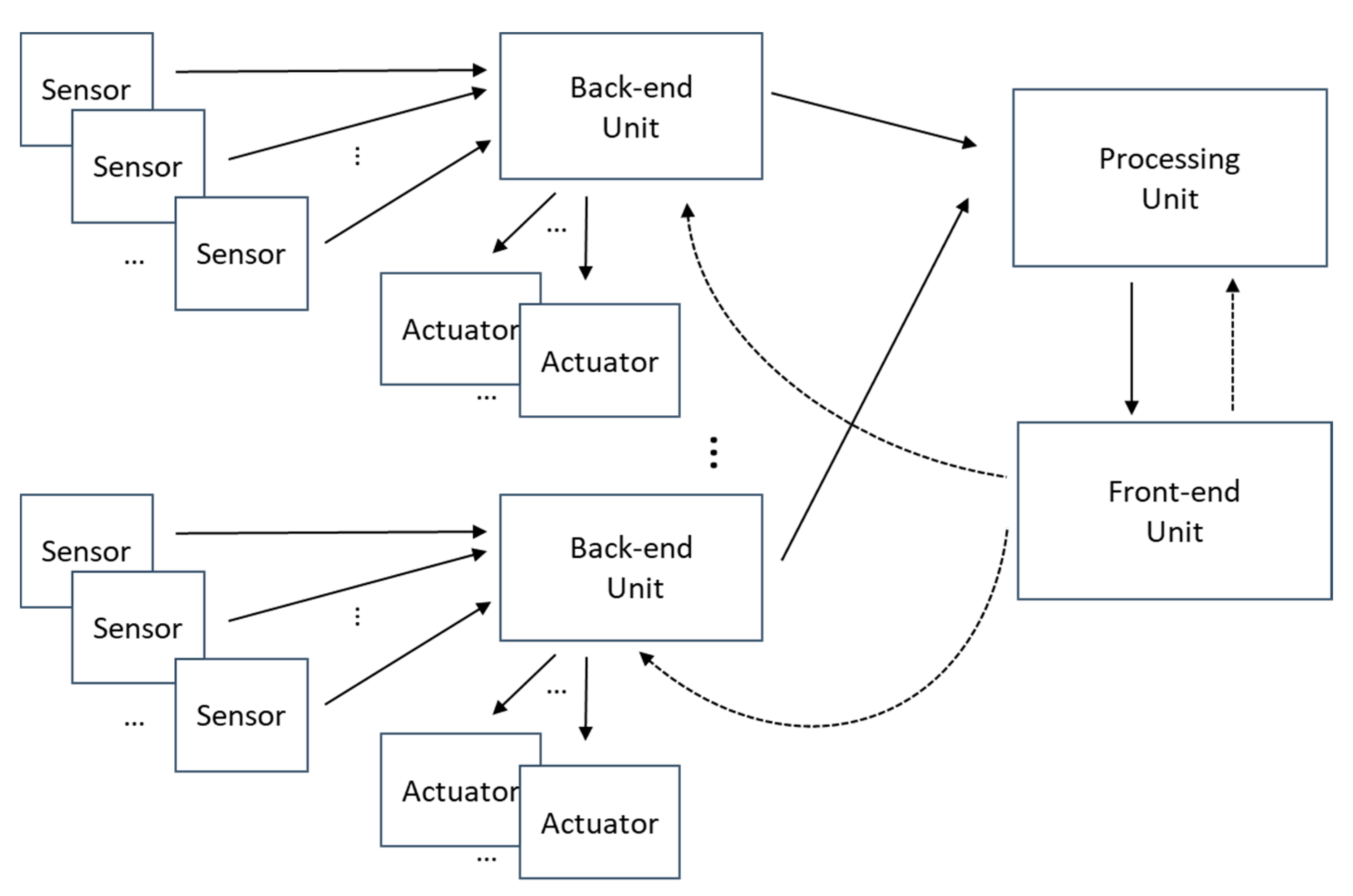
2.2. System Arquitecture
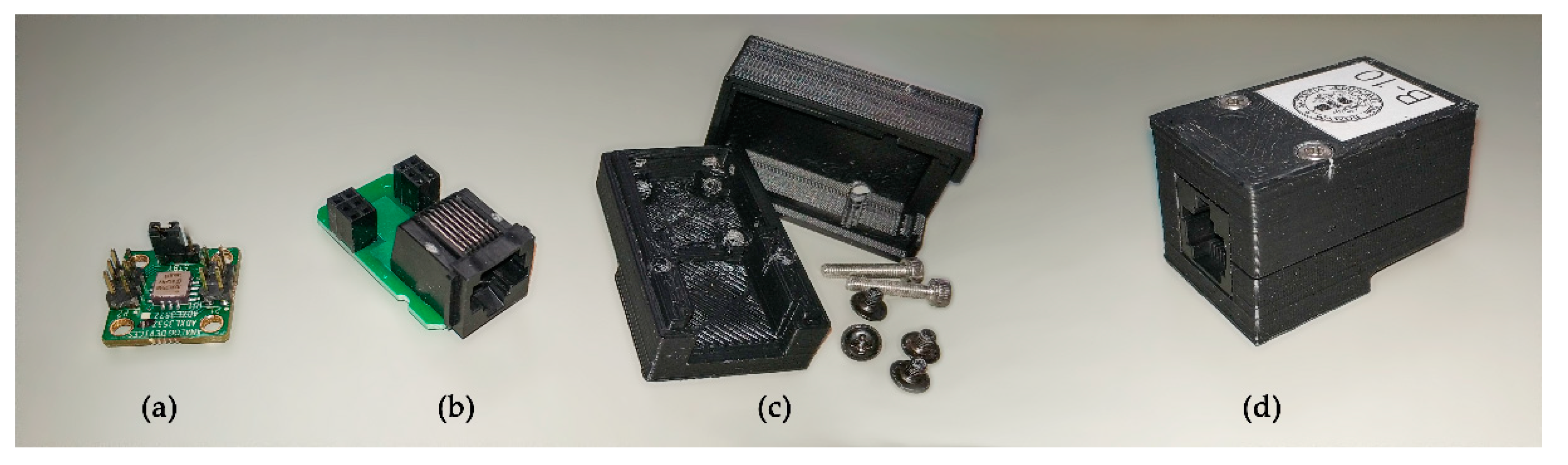
2.2.1. Sensor Description
2.2.2. Back-End Unit
2.2.3. Processing and Front-End Units
- As a front-end unit, the PC manages all the myRIO platforms connected to the system using a Wi-Fi interface. The PC sends the configuration of the six accelerometer sensors attached to each myRIO device, controls when the acquisition starts and when it stops, and receives the acquired data from the accelerometers for further processing. In addition, the PC shows a user interface that allows changing the system parameters and visualizing the results of the modal analysis of the structure.
- As a processing unit, the PC could execute additional algorithms to perform the modal analysis, evaluate structural changes or generate early warning signals, among others.
- Each myRIO device carries out the synchronous acquisition of the data from the attached ADXL355 sensors and the analog inputs and sends them to the PC.
- One of the myRIO can generate several types of signals in order to be used as excitation signal: a single tone of a fixed frequency, white noise within a limited frequency band or a tone sweep between two frequencies.
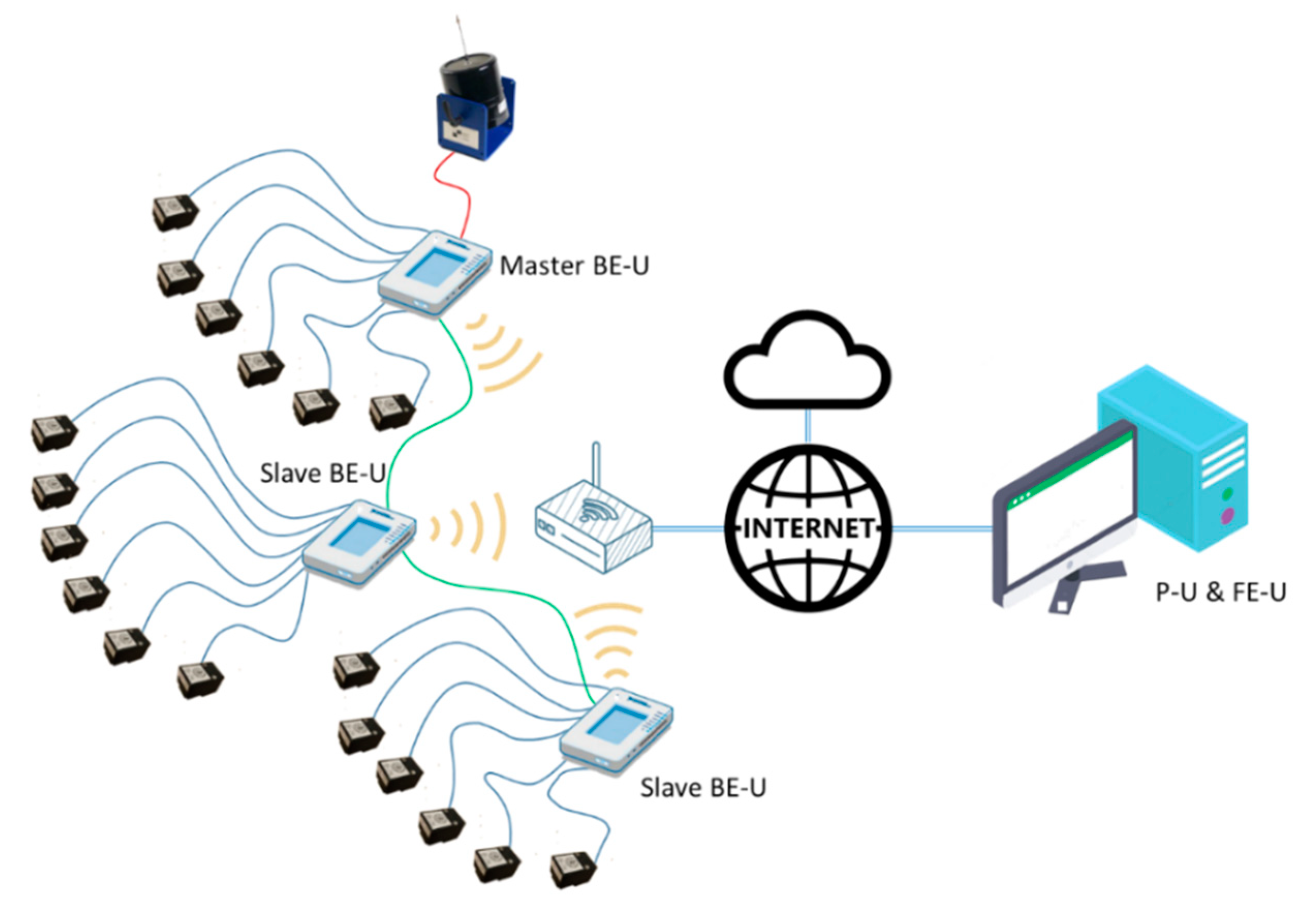
- If several myRIO platforms are simultaneously incorporated to the system, a synchronization mechanism must be used to ensure that the data from all the accelerometers is acquired at the same time. One of them must be the master, in order to generate a synchronize signal that is used by the myRIO slaves to start the acquisition synchronously.
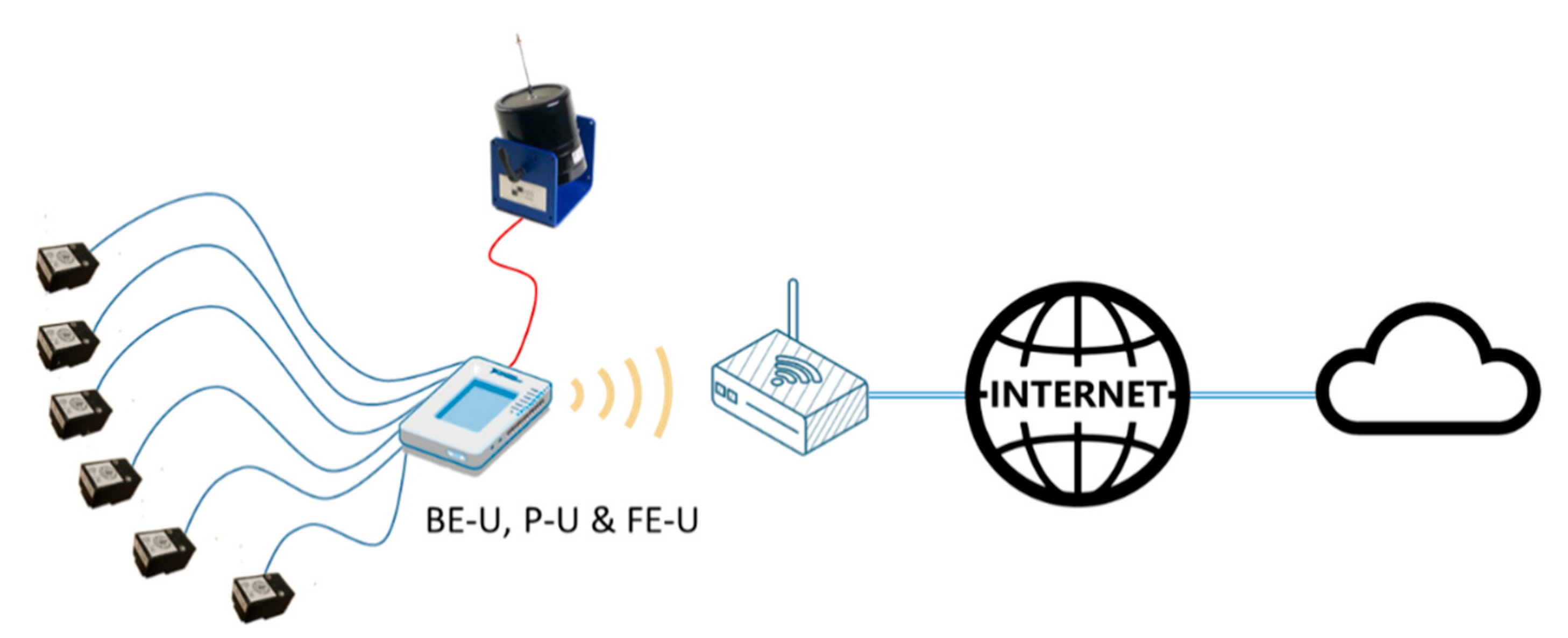
- On the other hand, the ARM processor included in the myRIO platform can also be used to implement PU and FE-U at the same time as the BE-U, defining a stand-alone system as shown in Figure 5.
3. System Validation
3.1. Reference System
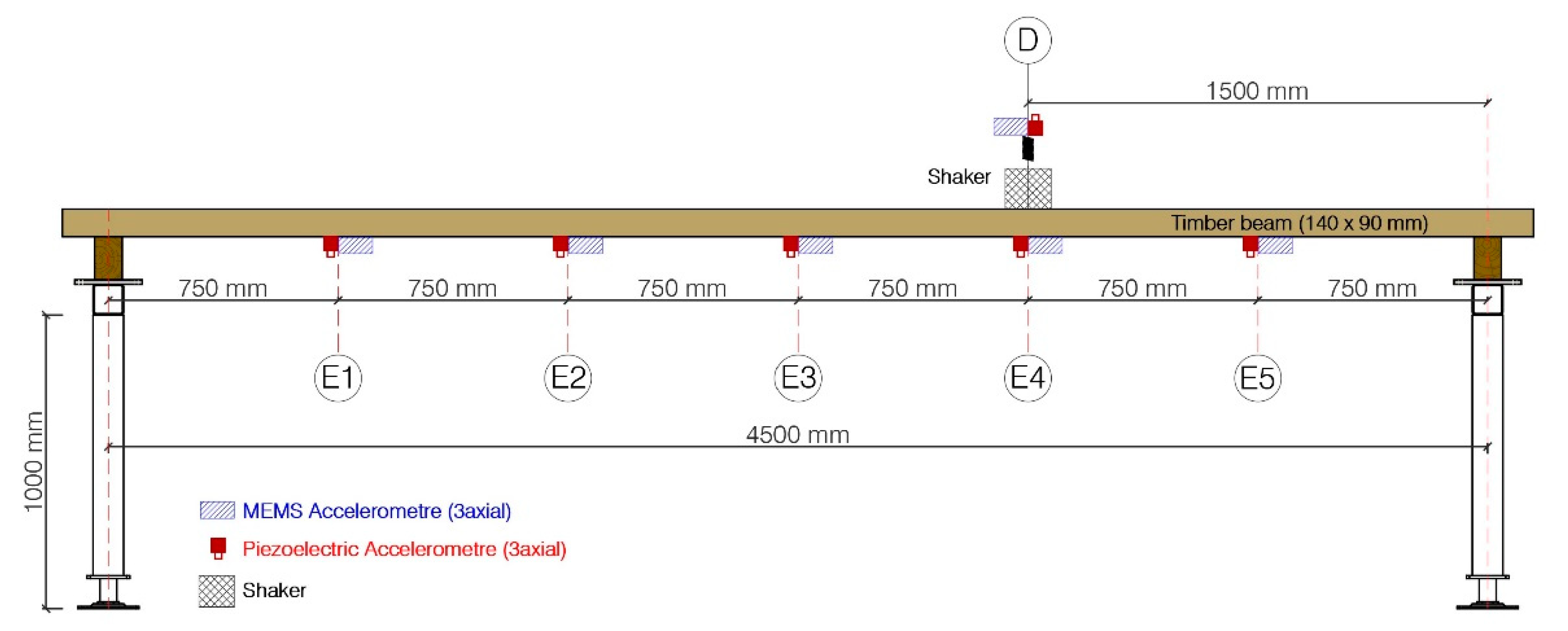
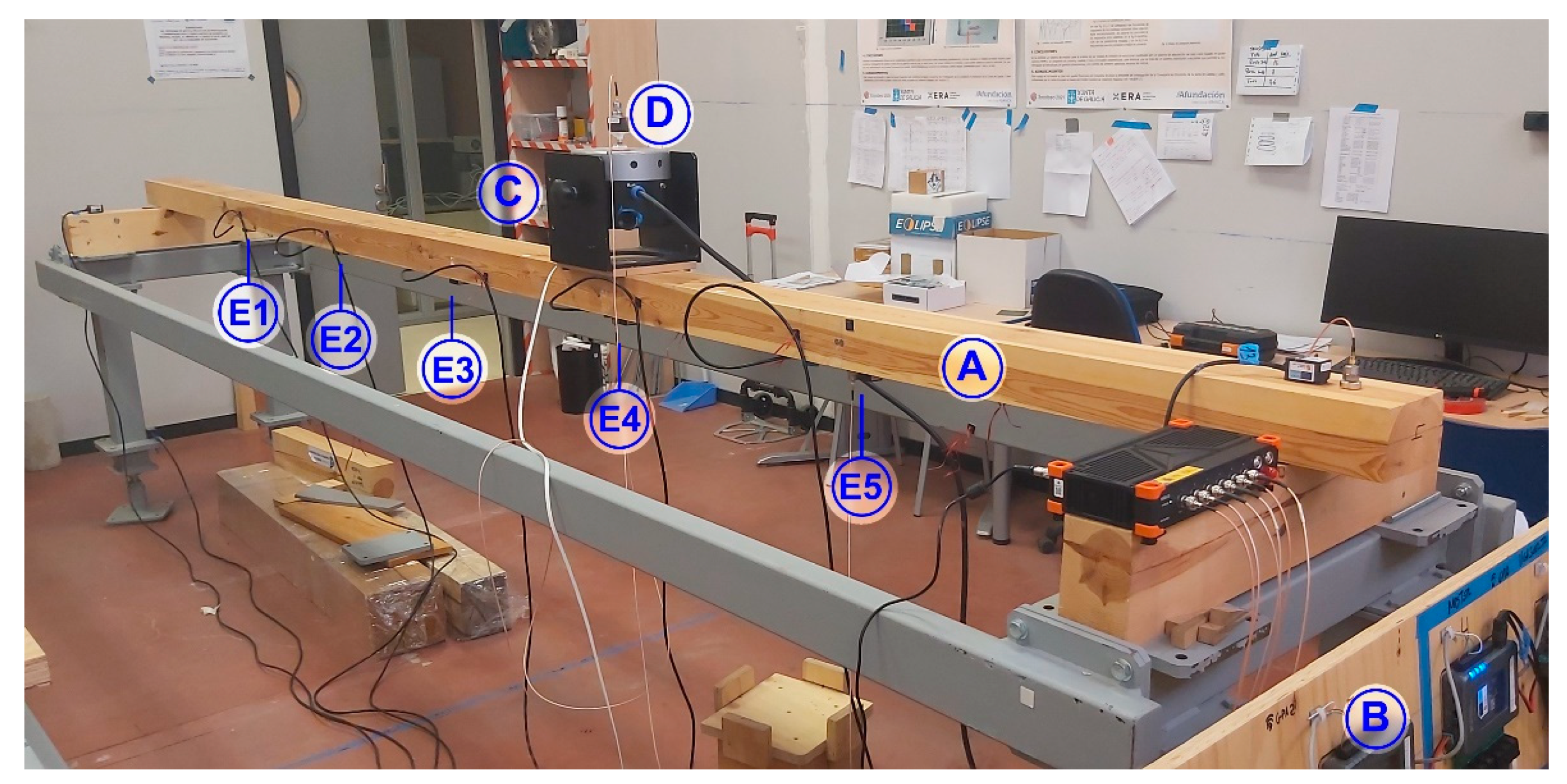
3.2. Measurement Layout
4. Comparative Results
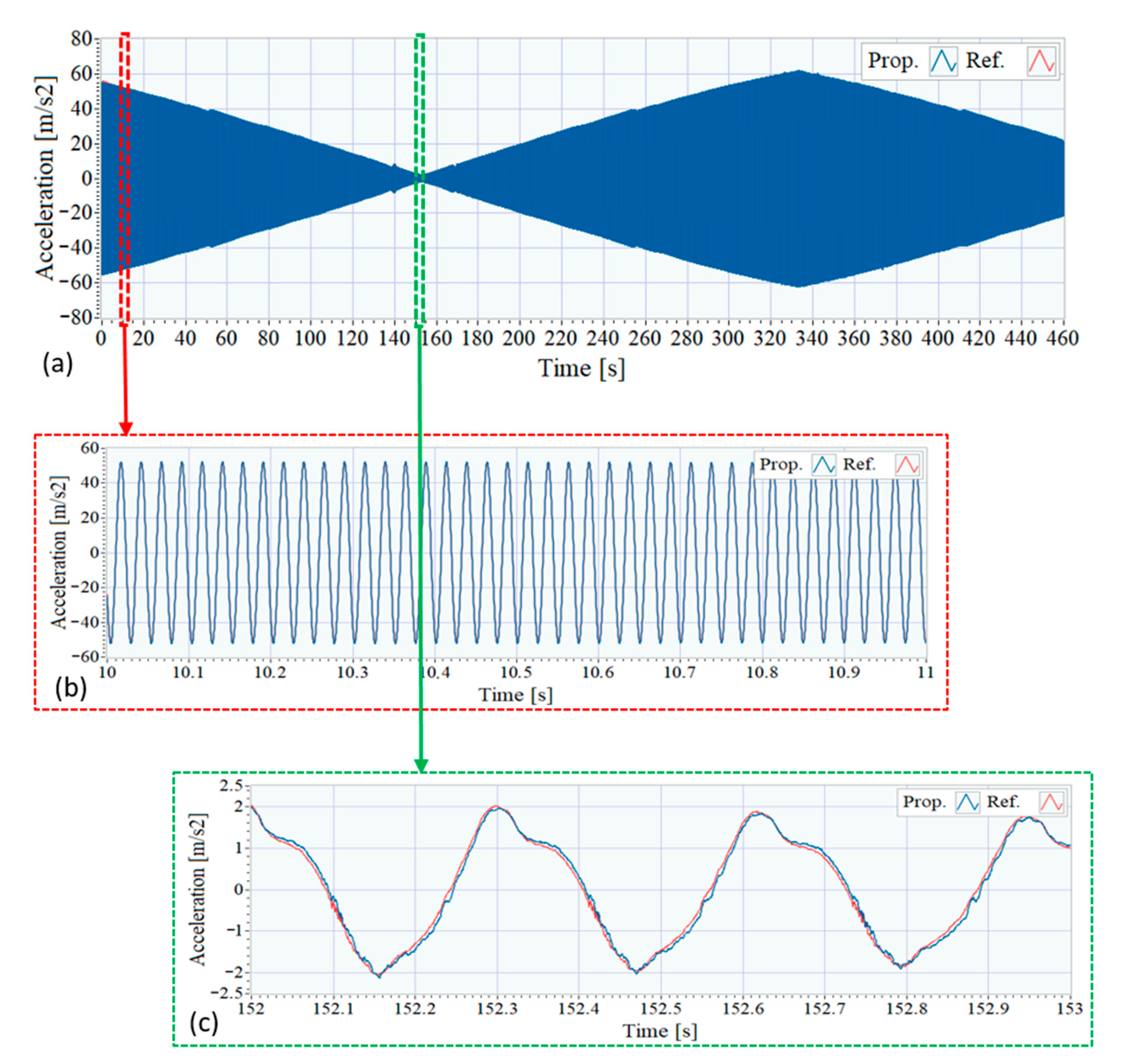
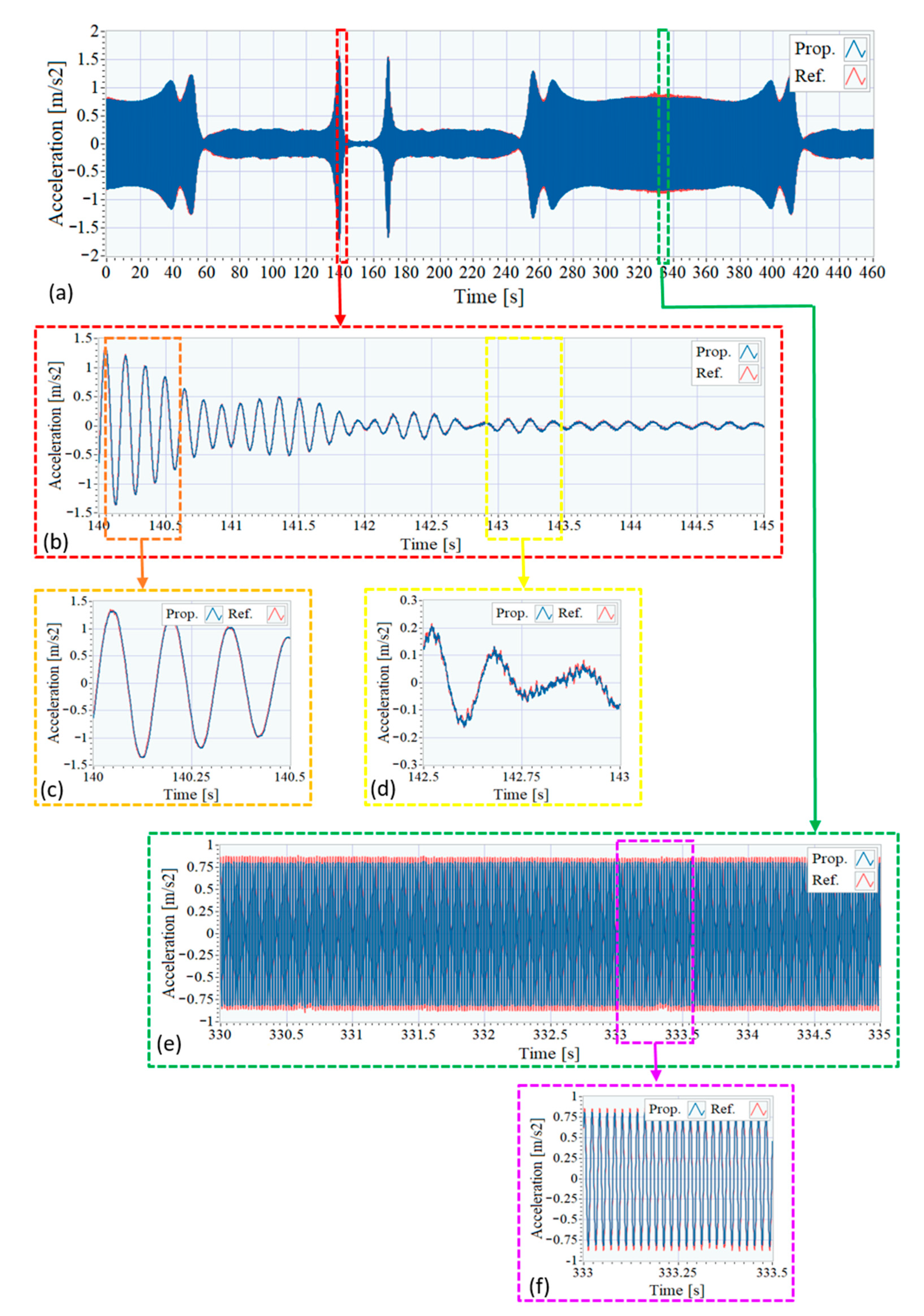
4.1. Time Signals
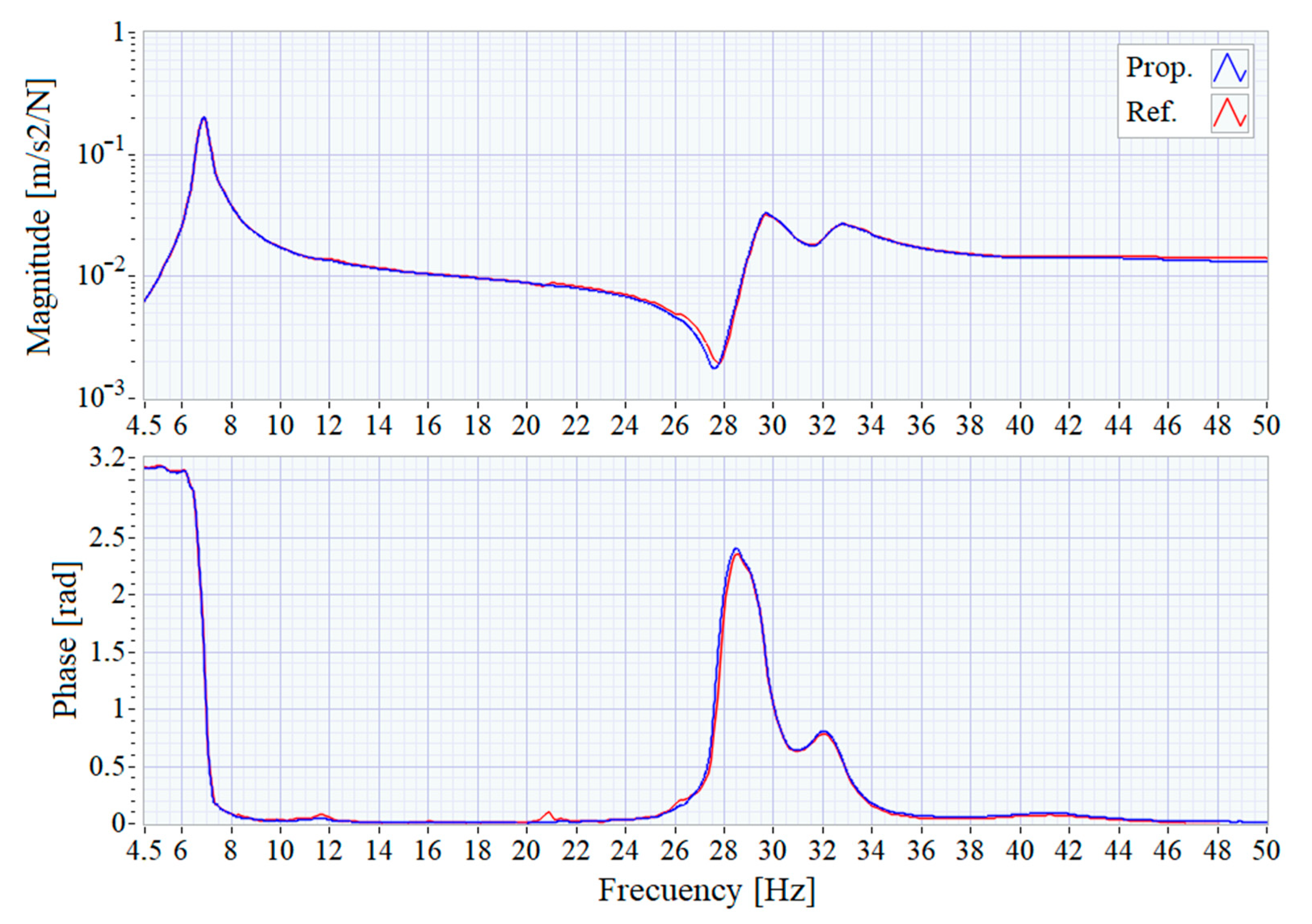
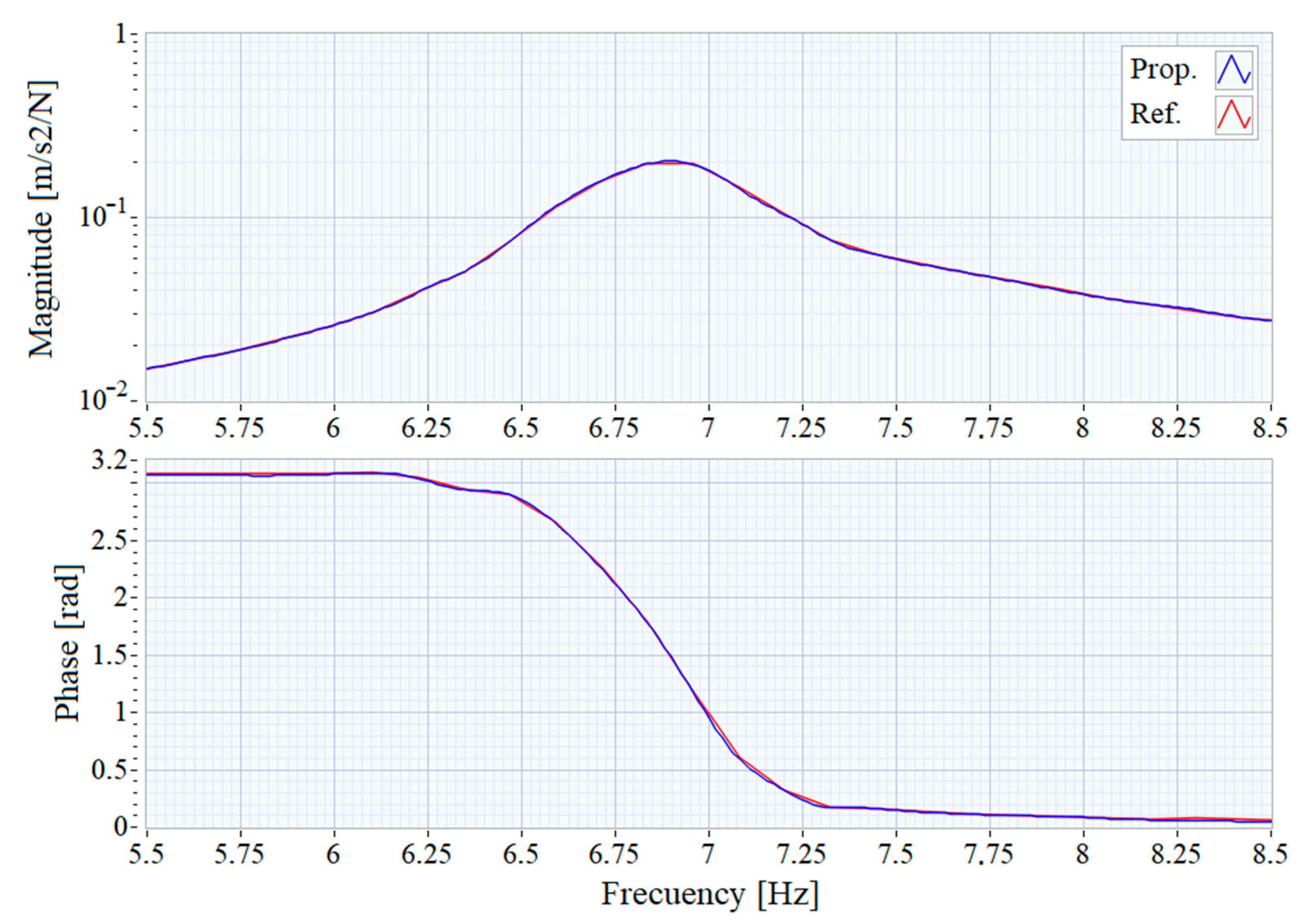
4.2. Frequency Response Functions
4.3. Cost
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- 2020 UNESCO World Heritage List. Available online: https://whc.unescoc.org/ (accessed on 25 November 2020).
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. A 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Campos, J.; Garcia, O.; Abel, A.; Casas, J.R.; Vehi, J. Health Monitoring System (HMS) for structural assessment. Smart Struct. Syst. 2009, 5, 223–240. [Google Scholar] [CrossRef]
- Ye, X.W.; Jin, T.; Yun, C.B. A review on deep learning-based structural health monitoring of civil infrastructures. Smart Struct. Syst. 2019, 24, 567–585. [Google Scholar] [CrossRef]
- Salawu, O.S. Detection of structural damage through changes in frequency: A review. Eng. Struct. 1997, 19, 718–723. [Google Scholar] [CrossRef]
- Farrar, C.R.; Doebling, S.W.; Nix, D.A. Vibration–based structural damage identification. Philos. Trans. R. Soc. A 2001, 359, 131–149. [Google Scholar] [CrossRef]
- Mahammad, A.H.; Kamrul, H.; Ker, P.J. A review on sensors and systems in structural health monitoring: Current issues and challenges. Smart Struct. Syst. 2018, 22, 509–525. [Google Scholar] [CrossRef]
- Goyal, D.; Pabla, B.S. Development of non-contact structural health monitoring system for machine tools. J. Appl. Res. Technol. 2016, 14, 245–258. [Google Scholar] [CrossRef]
- Swartz, R.A.; Lynch, J.P.; Zerbst, S.; Sweetman, B.; Rolfes, R. Structural monitoring of wind turbines using wireless sensor networks. Smart Struct. Syst. 2010, 6, 183–196. [Google Scholar] [CrossRef] [Green Version]
- Gomez, H.C.; Fanning, P.J.; Feng, M.Q.; Lee, S. Testing and long-term monitoring of a curved concrete box girder bridge. Eng. Struct. 2011, 33, 2861–2869. [Google Scholar] [CrossRef] [Green Version]
- Moser, P.; Moaveni, B. Design and development of a continuous monitoring system for the Dowling Hall Footbridge. Exp. Tech. 2013, 37, 15–26. [Google Scholar] [CrossRef]
- Waidyanatha, N. Towards a typology of integrated functional early warning systems. Int. J. Crit. Infrastruct. Prot. 2010, 6, 31–51. [Google Scholar] [CrossRef]
- Hu, C.; Xiao, M.; Zhou, H.; Wen, W.; Yun, H. Damage detection of wood beams using the differences in local modal flexibility. J. Wood Sci. 2011, 57, 479–483. [Google Scholar] [CrossRef]
- Girolami, A.; Brunelli, D.; Benini, L. Low-cost distributed health monitoring system for critical buildings. In Proceedings of the 2017 IEEE Workshop on Environmental, Energy, and Structural Monitoring Systems (EESMS), Milan, Italy, 24–25 July 2007; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Das, S.; Saha, P. A review of some advanced sensors used for health diagnosis of civil engineering structures. Measurement 2018, 129, 68–90. [Google Scholar] [CrossRef]
- Ceylan, H.; Gopalakrishnan, K.; Kim, S.; Taylor, P.C.; Prokudin, M.; Buss, A.F. Highway infrastructure health monitoring using micro-electromechanical sensors and systems (MEMS). J. Civ. Eng. Manag. 2013, 19 (Suppl. 1), S188–S201. [Google Scholar] [CrossRef]
- Nagayama, T.; Sim, S.H.; Miyamori, Y.; Spencer, B.F., Jr. Issues in structural health monitoring employing smart sensors. Smart Struct. Syst. 2007, 3, 299–320. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, R.R.; Lameiras, R.D.M. Evaluation of low-cost MEMS accelerometers for SHM: Frequency and damping identification of civil structures. Lat. Am. J. Solids Struct. 2019, 16, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Sabato, A.; Niezrecki, C.; Fortino, G. Wireless MEMS-based accelerometer sensor boards for structural vibration monitoring: A review. IEEE Sens. J. 2016, 17, 226–235. [Google Scholar] [CrossRef]
- Acar, C.; Shkel, A.M. Experimental evaluation and comparative analysis of commercial variable-capacitance MEMS accelerometers. J. Micromech. Microeng. 2003, 13, 634–645. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Ou, J.; Li, H. Design, calibration and application of wireless sensors for structural global and local monitoring of civil infrastructures. Smart Struct. Syst. 2010, 6, 641–659. [Google Scholar] [CrossRef]
- Ha, D.W.; Park, H.S.; Choi, S.W.; Kim, Y. A Wireless MEMS-Based Inclinometer Sensor Node for Structural Health Monitoring. Sensors 2013, 13, 16090–16104. [Google Scholar] [CrossRef] [Green Version]
- Zou, Y.; Chen, Y.; Liu, P. Refactoring and Optimization of Bridge Dynamic Displacement Based on Ensemble Empirical Mode Decomposition. Sensors 2019, 19, 3125. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Fu, Y.; Chow, R.; Spencer, B.F.; Park, J.W.; Mechitov, K. Development of a High-Sensitivity Wireless Accelerometer for Structural Health Monitoring. Sensors 2018, 18, 262. [Google Scholar] [CrossRef]
- Elhattab, A.; Uddin, N.; Obrien, E. Extraction of Bridge Fundamental Frequencies Utilizing a Smartphone MEMS Accelerometer. Sensors 2019, 19, 3143. [Google Scholar] [CrossRef] [Green Version]
- Iban, N.; Soria, J.M.; Magdaleno, A.; Casado, C.; Diaz, I.M.; Lorenzana, A. Ad-hoc vibration monitoring system for a stress-ribbon footbridge: From design to operation. Smart Struct. Syst. 2018, 22, 13–25. [Google Scholar] [CrossRef]
- Hsu, T.Y.; Yin, R.C.; Wu, Y.M. Evaluating post-earthquake building safety using economical MEMS seismometers. Sensors 2018, 18, 1437. [Google Scholar] [CrossRef] [Green Version]
- Iacono, F.L.; Navarra, G.; Oliva, M. Structural monitoring of Himera viaduct by low-cost MEMS sensors: Characterization and preliminary results. Meccanica 2017, 52, 3221–3236. [Google Scholar] [CrossRef]
- Kavitha, S.; Daniel, R.J.; Sumangala, K. High performance MEMS accelerometers for concrete SHM applications and comparison with COTS accelerometers. Mech. Syst. Signal. Pract. 2016, 66, 410–424. [Google Scholar] [CrossRef]
- Bedon, C.; Bergamo, E.; Izzi, M.; Noè, S. Prototyping and validation of MEMS accelerometers for structural health monitoring—The case study of the Pietratagliata cable-stayed bridge. J. Sens. Actuator Netw. 2018, 7, 30. [Google Scholar] [CrossRef] [Green Version]
- Kavitha, S.; Daniel, R.J.; Sumangala, K. Design and analysis of MEMS comb drive capacitive accelerometer for SHM and seismic applications. Measurement 2016, 93, 327–339. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Pistorio, A. A low-cost multi-sensor approach for early warning in structural monitoring of buildings and structures. In Proceedings of the 2014 IEEE International instrumentation and measurement technology conference (I2MTC), Montevideo, Uruguay, 12–15 May 2014; pp. 742–746. [Google Scholar] [CrossRef]
- Beskhyroun, S.; Ma, Q. Low-cost accelerometers for experimental modal analysis. In Proceedings of the 15th World Conference on Earthquake Engineering, Lisbon, Portugal, 24–28 September 2012; pp. 1–10. [Google Scholar]
- Tan, T.D.; Anh, N.T.; Anh, G.Q. Low-cost Structural Health Monitoring scheme using MEMS-based accelerometers. In Proceedings of the 2011 Second International Conference on Intelligent Systems, Modelling and Simulation, Kuala Lumpur, Malaysia, Phnom Penh, Cambodia, 24–28 January 2011; pp. 217–220. [Google Scholar] [CrossRef]
- Rosal, J.E.C.; Caya, M.V.C. Development of Triaxial MEMS Digital Accelerometer on Structural Health Monitoring System for Midrise Structures. In Proceedings of the 2018 IEEE 10th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Baguio, Philippines, 29 November–2 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Yick, J.; Biswanath, M.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef] [Green Version]
- Lamonaca, F.; Sciammarella, P.F.; Scuro, C.; Carnì, D.L.; Olivito, R.S. Internet of Things for Structural Health Monitoring. In Proceedings of the 2018 Workshop on Metrology for Industry 4.0 and IoT, Brescia, Italy, 16–18 April 2018; pp. 95–100. [Google Scholar] [CrossRef]
- ADXL355 3-Axis MEMS Accelerometer. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/adxl354_355.pdf (accessed on 12 May 2020).
- myRIO Platform. Available online: https://www.ni.com/pdf/manuals/376047c.pdf (accessed on 12 May 2020).
- DS-SIRIUS Data-Logger. Available online: https://dewesoft.com/products/daq-systems/sirius (accessed on 15 May 2020).
- KS76C.100 IEPE Accelerometers. Available online: https://mmf.de/standard_accelerometers.htm (accessed on 15 May 2020).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Prop. System | Ref. System |
|---|---|---|
| Range | ±2 g, ±4 g, and ±8 g | ±60 g |
| Digital sensitivity | 3.9, 7.8 and 15.6 μg/LSB | 11.9 μg/LSB |
| Noise density | 25 µg/√Hz | 3 µg/√Hz |
| Max. sample frequency | 4 kHz | 200 kHz |
| Bits per sample | 20 | 24 |
| Max. accelerometer channels | 6 tri-axial | 8 uni-axial |
| Element | Reference System | Proposed System | ||||
|---|---|---|---|---|---|---|
| Model | Cost/Unit | Total | Model | Cost/Unit | Total | |
| DAQ | DS-SIRIUS | 6500 | 6500 | myRIO 1900 | 580 | 580 |
| 6× Accelerometers | KS76C.100 | 350 | 2100 | ADXL355 + Box | 50 | 300 |
| Cables | UNF to BNC | 75 | 450 | RJ45 to RJ45 | 8 | 48 |
| Total cost | 9050 | 928 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villacorta, J.J.; del-Val, L.; Martínez, R.D.; Balmori, J.-A.; Magdaleno, Á.; López, G.; Izquierdo, A.; Lorenzana, A.; Basterra, L.-A. Design and Validation of a Scalable, Reconfigurable and Low-Cost Structural Health Monitoring System. Sensors 2021, 21, 648. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020648
Villacorta JJ, del-Val L, Martínez RD, Balmori J-A, Magdaleno Á, López G, Izquierdo A, Lorenzana A, Basterra L-A. Design and Validation of a Scalable, Reconfigurable and Low-Cost Structural Health Monitoring System. Sensors. 2021; 21(2):648. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020648
Chicago/Turabian StyleVillacorta, Juan J., Lara del-Val, Roberto D. Martínez, José-Antonio Balmori, Álvaro Magdaleno, Gamaliel López, Alberto Izquierdo, Antolín Lorenzana, and Luis-Alfonso Basterra. 2021. "Design and Validation of a Scalable, Reconfigurable and Low-Cost Structural Health Monitoring System" Sensors 21, no. 2: 648. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020648